Learning the Cost Function for Foothold Selection in a Quadruped Robot †

 ,
,
Abstract
1. Introduction
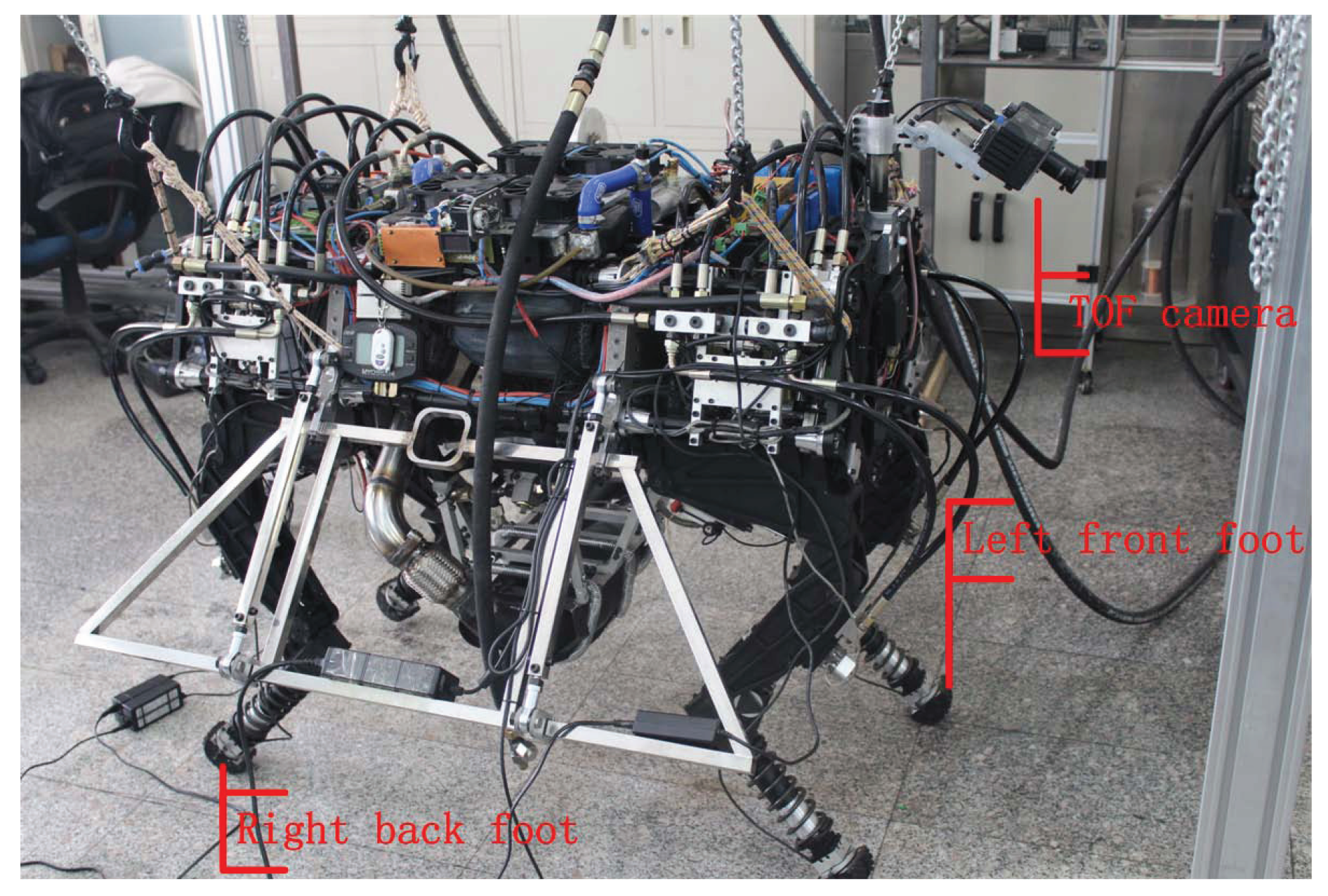
2. Modelling the Quadruped Robot
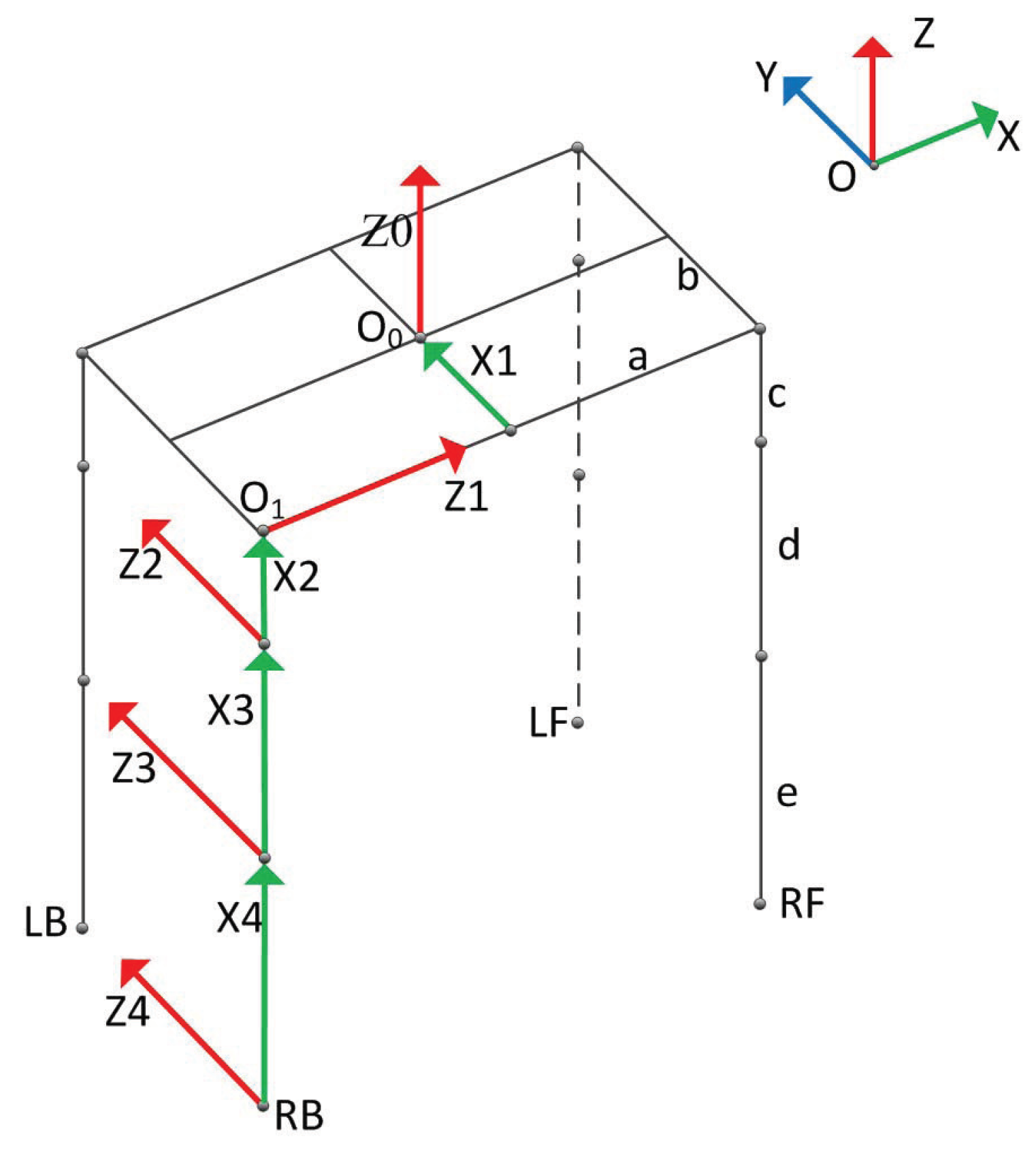
2.1. DH Parameters of the Model
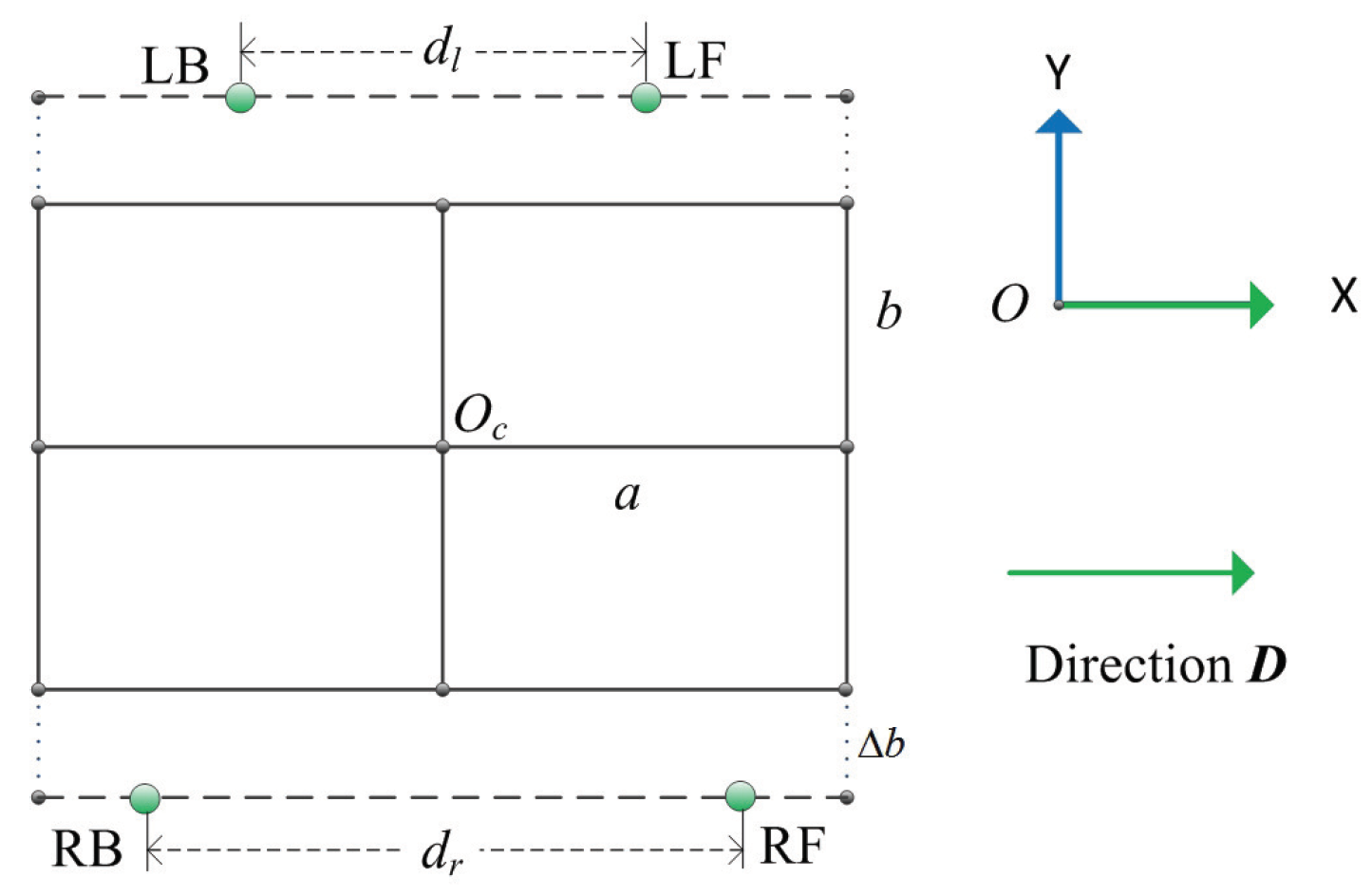
2.2. Default Foothold
3. Computing the Terrain Features
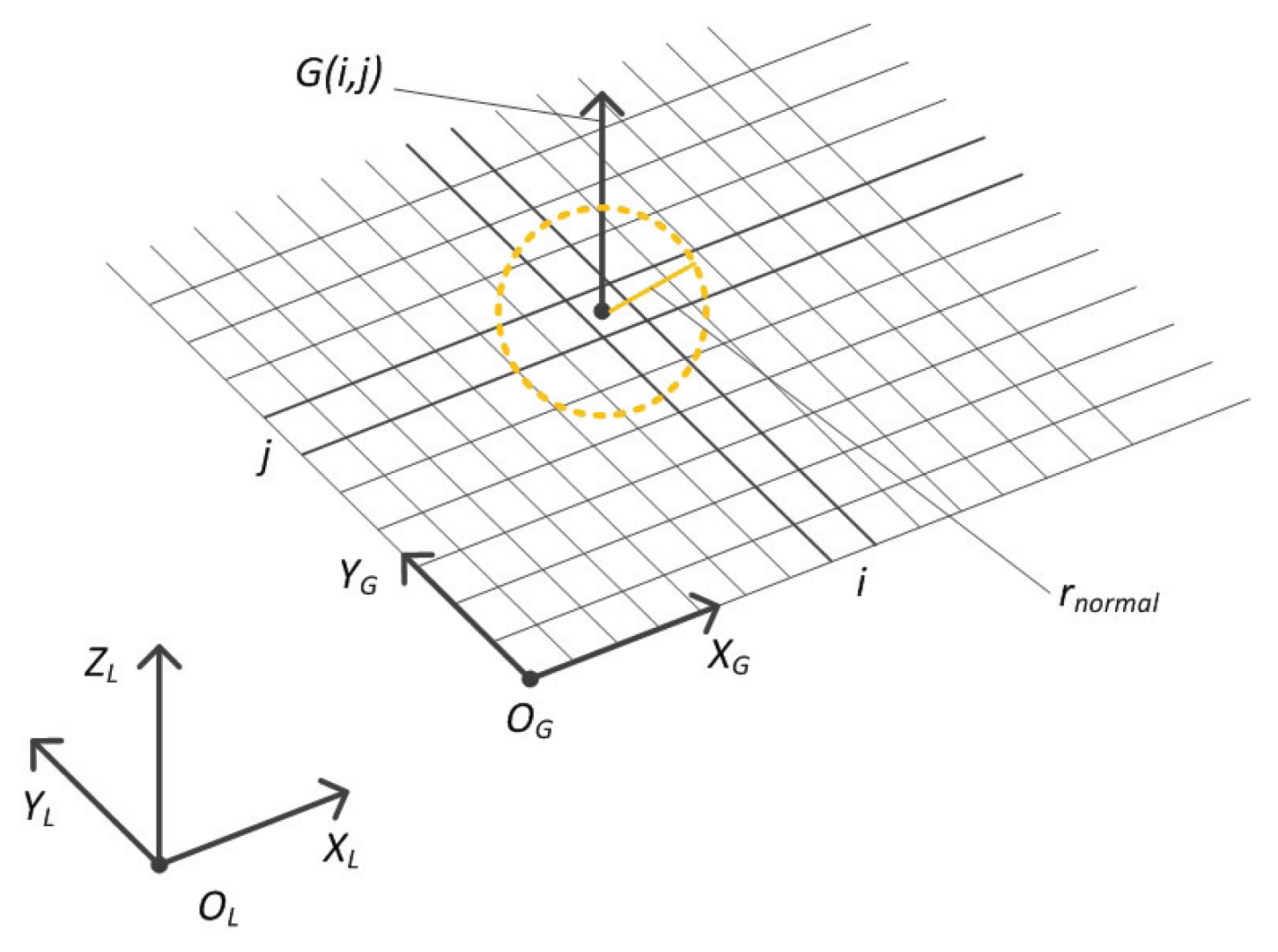
3.1. Constructing 2.5D Elevation Map Based on Grids
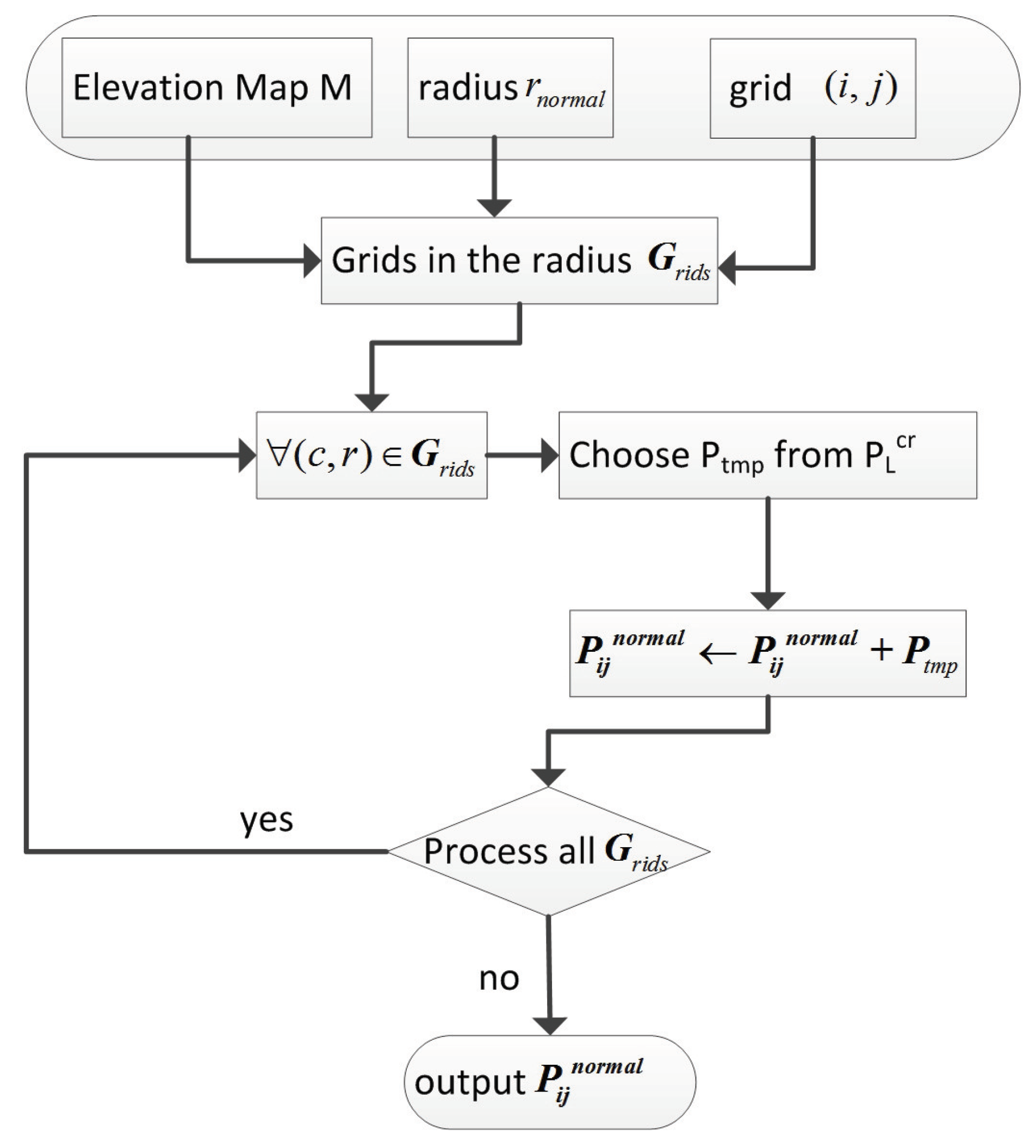
3.2. Computing Normal and Curvature
4. Designing the Cost Function of Selecting a Foothold
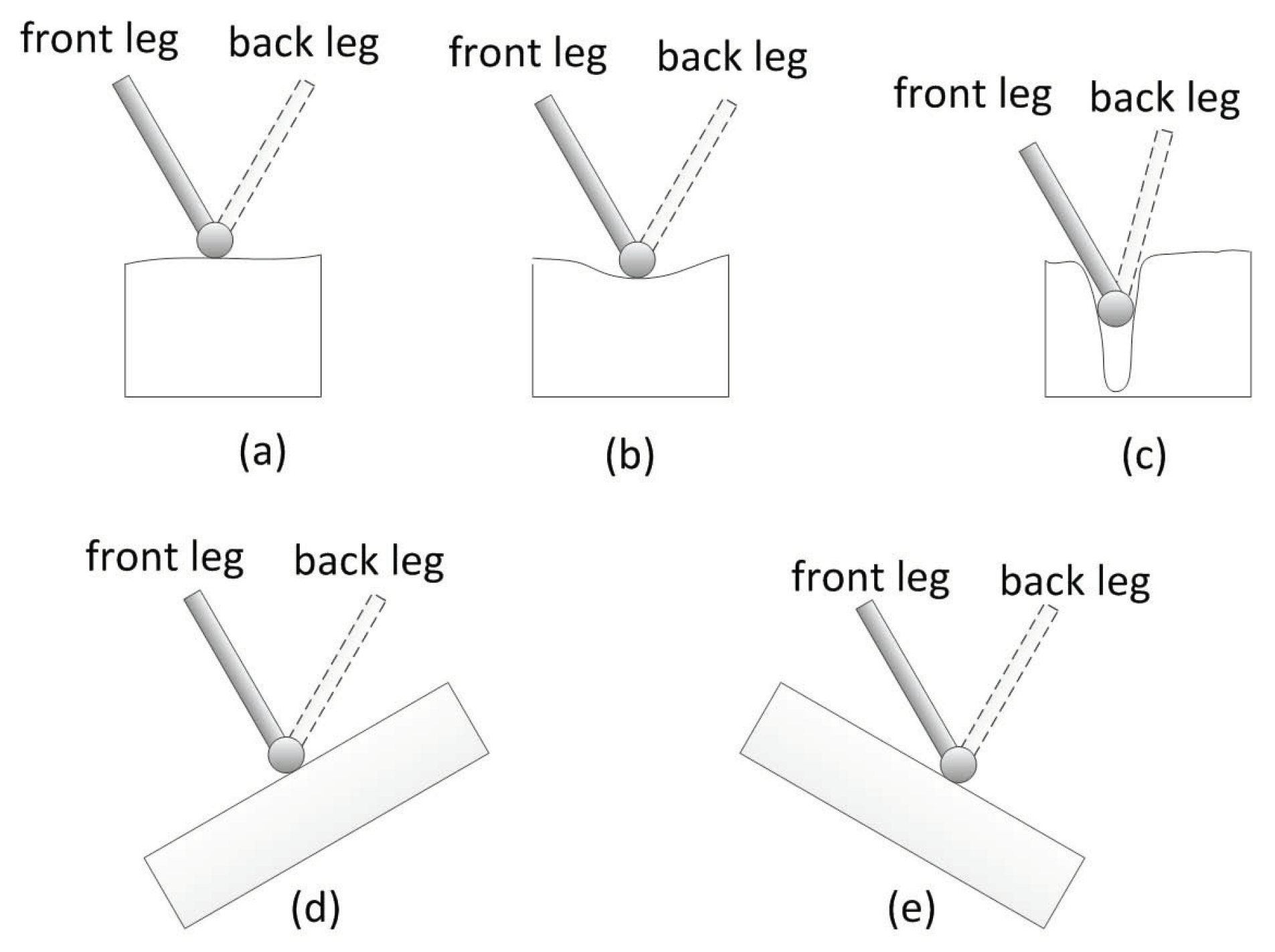
4.1. Rules for Selecting a Foothold
4.2. Cost Function Definition
5. Learning the Weight Vector of the Cost Function
5.1. Training Data Collection
5.2. Weight Vector Computation
6. Experimental Results and Discussion
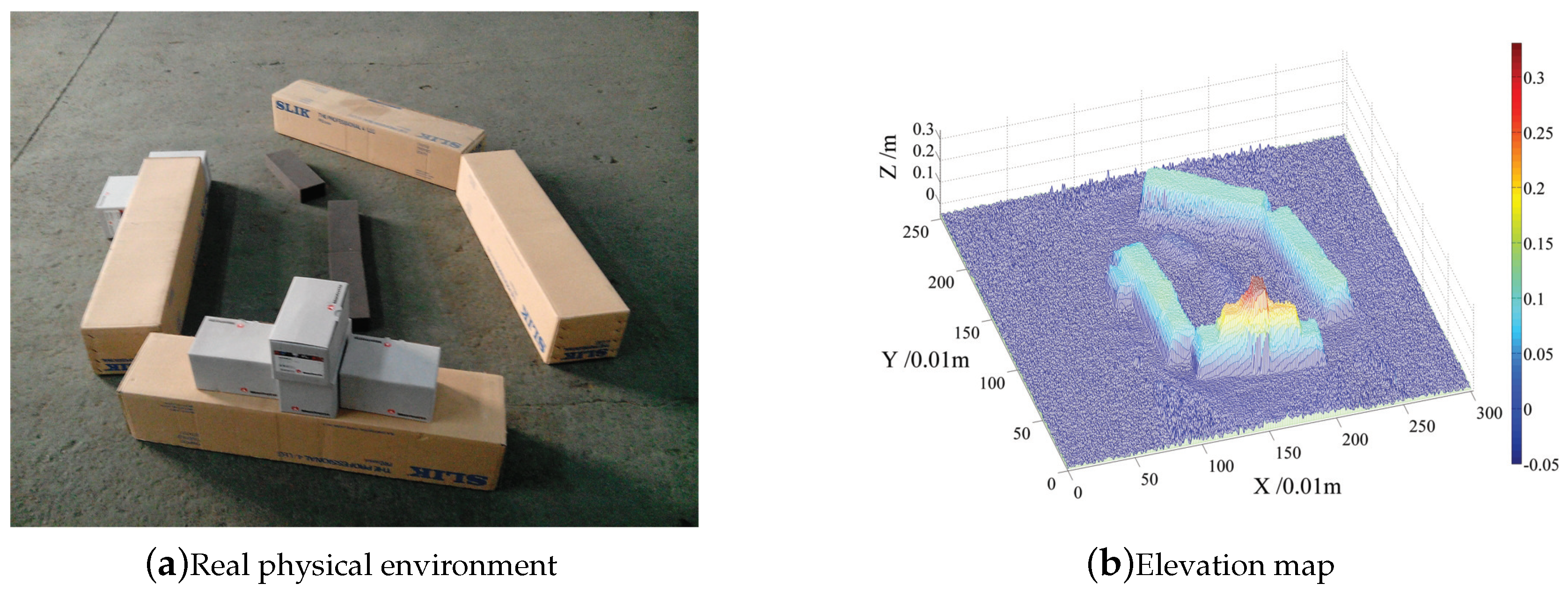
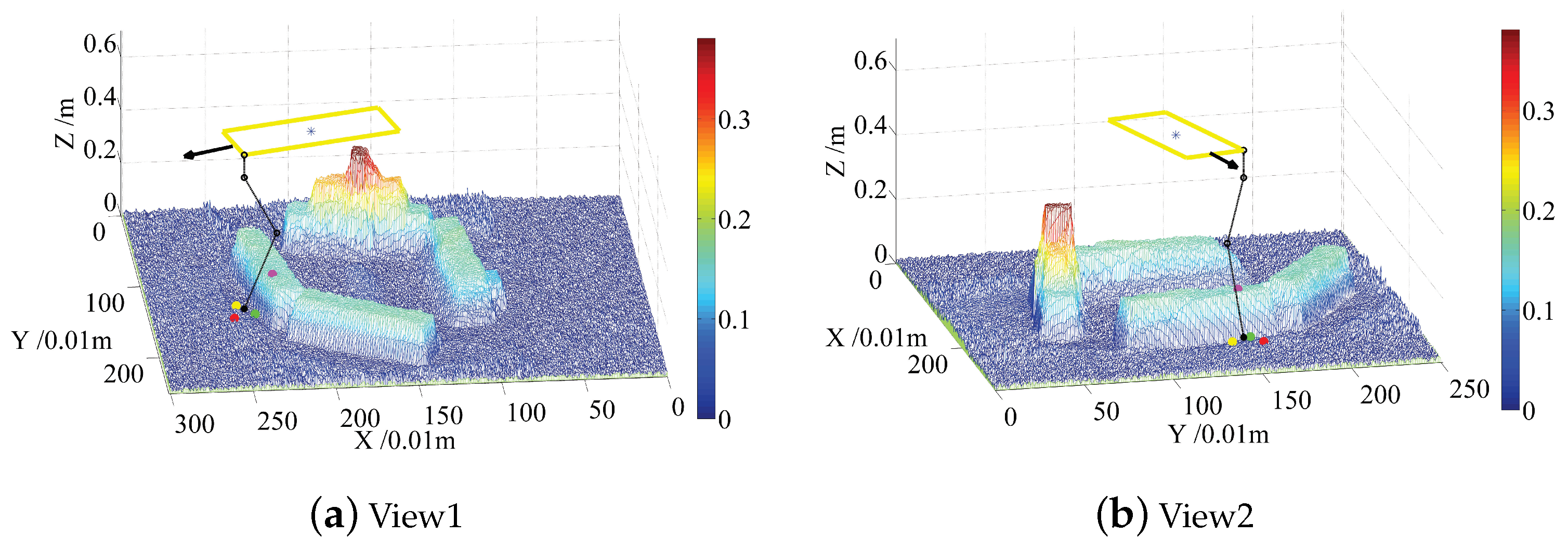
6.1. Semi Physical Experiment
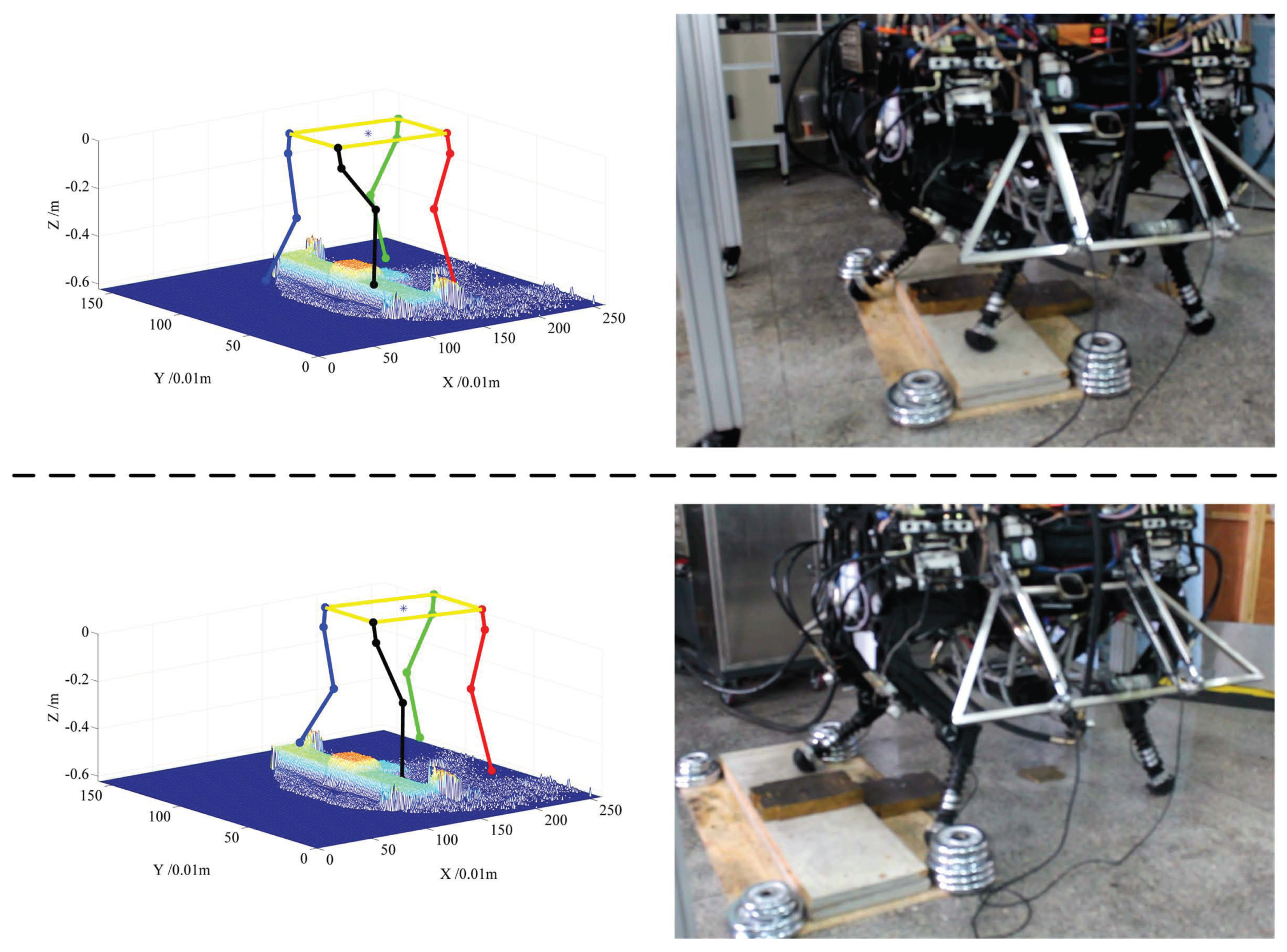
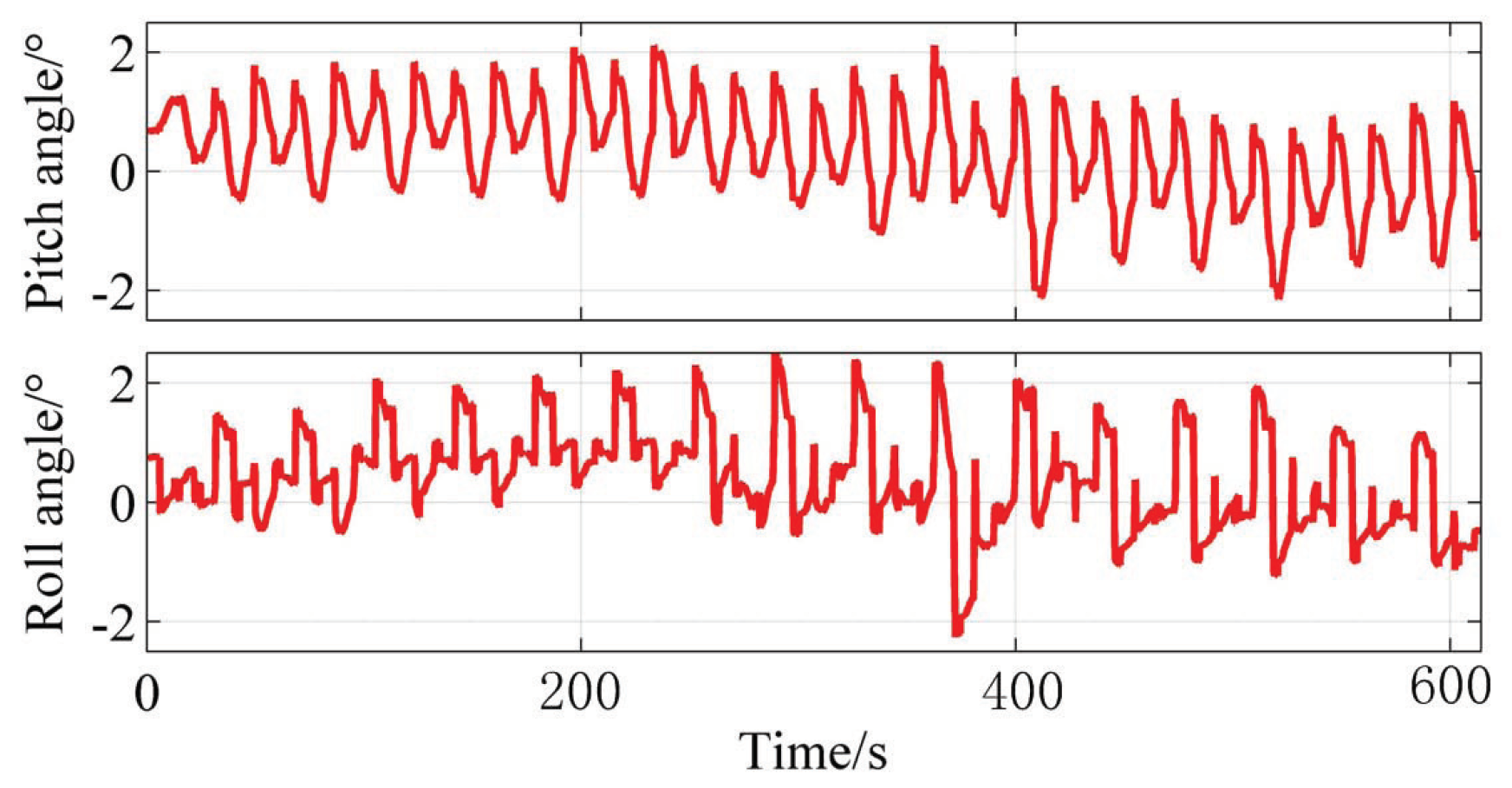
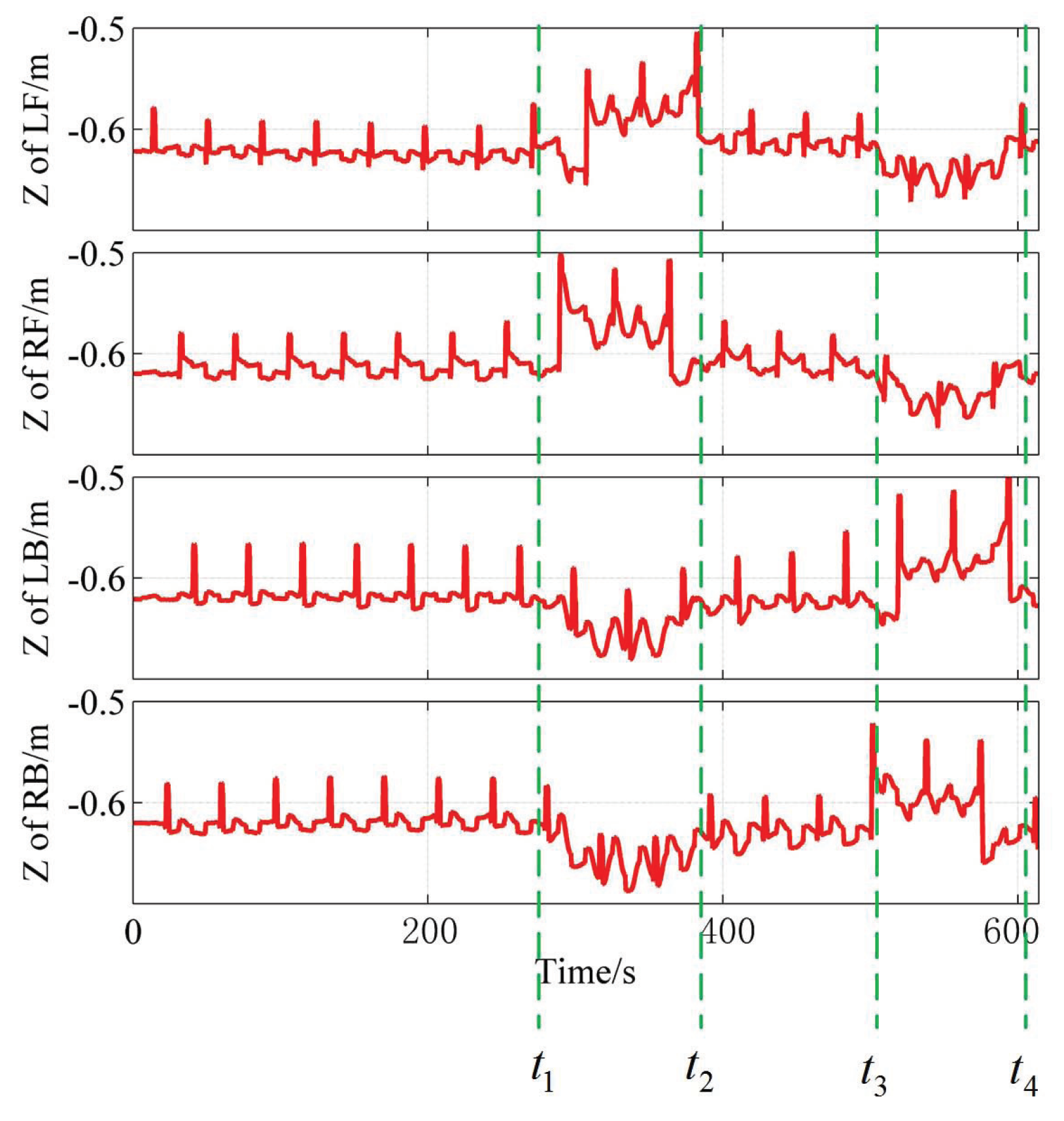
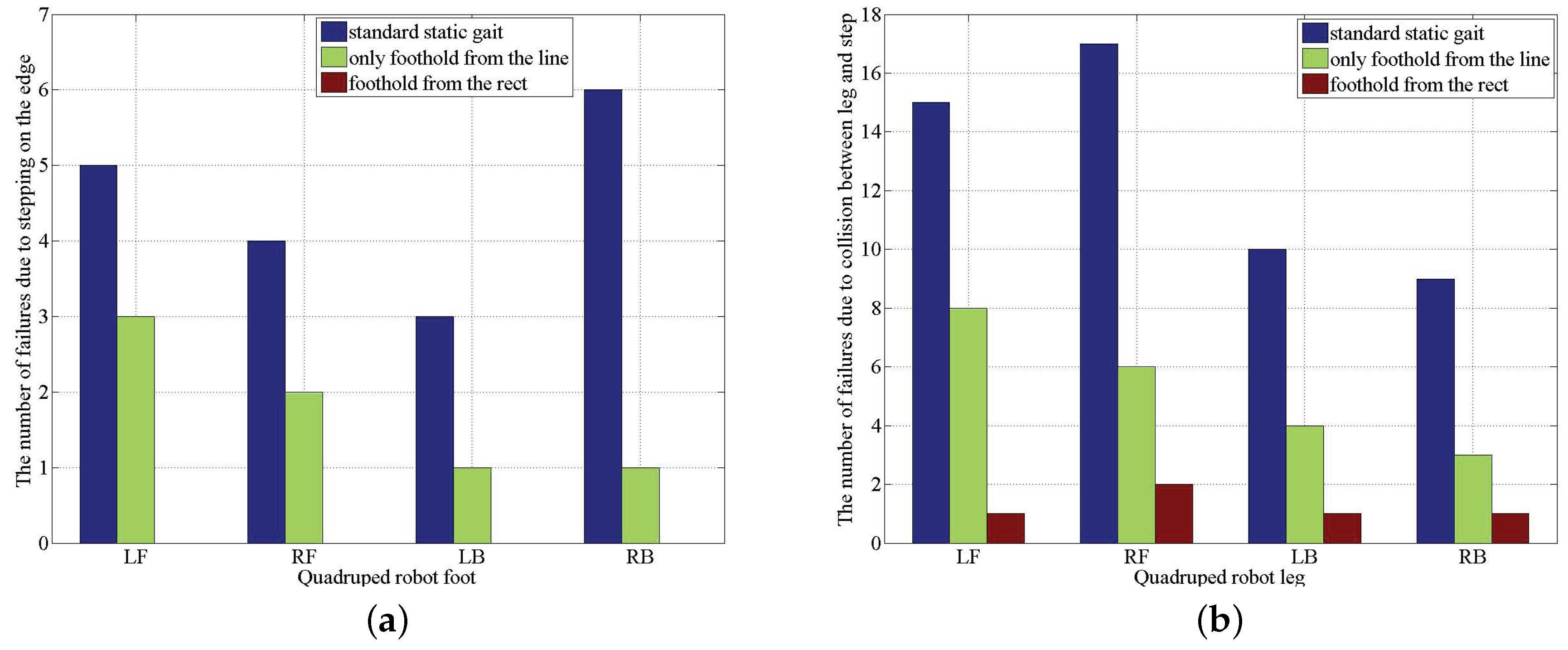
6.2. Experiments for Walking across a Step
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hornung, A.; Wurm, K.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robots 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Pfaff, P.; Triebel, R.; Burgard, W. An efficient extension to elevation maps for outdoor terrain mapping and loop closing. Int. J. Robot. Res. 2007, 26, 217–230. [Google Scholar] [CrossRef]
- Belter, D.; Łabecki, P.; Fankhauser, P.; Siegwart, R. RGB-D terrain perception and dense mapping for legged robots. Int. J. Appl. Math. Comput. Sci. 2016, 26, 81–97. [Google Scholar] [CrossRef]
- Xingdong, L. Estimating 6 DOF pose transformation of a TOF laser camera. Infrared Laser Eng. 2015, 44, 2231–2238. [Google Scholar]
- Lu, F.; Milios, E. Globally Consistent Range Scan Alignment for Environment Mapping. Auton. Robots 1997, 4, 333–349. [Google Scholar] [CrossRef]
- Borrmann, D.; Elseberg, J.; Lingemann, K.; Nüchter, A.; Hertzberg, J. Globally consistent 3D mapping with scan matching. Robot. Auton. Syst. 2008, 56, 130–142. [Google Scholar] [CrossRef]
- Zhang, B.; Gu, J.; Chen, C.; Han, J.; Su, X.; Cao, X.; Liu, J. One-Two-One network for Compression Artifacts Reduction in Remote Sensing. ISPRS J. Photogramm. Remote Sens. 2018, 145, 184–196. [Google Scholar]
- Wu, G.; Han, J.; Lin, Z.; Ding, G.; Zhang, B.; Ni, Q. Joint Image-Text Hashing for Fast Large-Scale Cross-Media Retrieval Using Self-Supervised Deep Learning. IEEE Trans. Ind. Electron. 2018, in press. [Google Scholar] [CrossRef]
- Barasuol, V.; Camurri, M.; Bazeille, S.; Caldwell, D.G.; Semini, C. Reactive trotting with foot placement corrections through visual pattern classification. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 5734–5741. [Google Scholar]
- Fankhauser, P.; Bjelonic, M.; Bellicoso, C.D.; Miki, T.; Hutter, M. Robust Rough-Terrain Locomotion with a Quadrupedal Robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Mastalli, C.; Havoutis, I.; Winkler, A.W.; Caldwell, D.G.; Semini, C. On-line and On-board Planning and Perception for Quadrupedal Locomotion. In Proceedings of the IEEE Conference on Technologies for Practical Robot Applications (TEPRA), Boston, CA, USA, 11–12 May 2015. [Google Scholar]
- Ijspeert, A. Central Pattern Generators for Locomotion Control in Animals and Robots: A Review. Neural Netw. 2008, 21, 642–653. [Google Scholar] [CrossRef] [PubMed]
- Ajalooeian, M.; Pouya, S.; Sproewitz, A.; Ijspeert, A. Central Pattern Generators Augmented with Virtual Model Control for Quadruped Rough Terrain Locomotion. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3321–3328. [Google Scholar]
- Peng, S.; Lam, C.; Cole, G. A biologically inspired four legged walking robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 2024–2030. [Google Scholar]
- Kalakrishnan, M.; Buchli, J.; Pastor, P.; Mistry, M.; Schaal, S. Learning, Planning, and Control for Quadruped Locomotion over Challenging Terrain. Int. J. Robot. Res. 2011, 30, 236–258. [Google Scholar] [CrossRef]
- Kolter, J.Z.; Ng, A.Y. The Stanford Littledog: A Learning and Rapid Replanning Approach to Quadruped Locomotion. Int. J. Robot. Res. 2011, 30, 150–174. [Google Scholar] [CrossRef]
- Zucker, M.; Ratliff, N.; Stolle, M.; Chestnutt, J.; Bagnell, J.A.; Atkeson, C.G.; Kuffner, J. Optimization and Learning for Rough Terrain Legged Locomotion. Int. J. Robot. Res. 2011, 30, 175–191. [Google Scholar] [CrossRef]
- Pippine, J.; Hackett, D.; Watson, A. An Overview of the Defense Advanced Research Projects Agency’s Learning Locomotion Program. Int. J. Robot. Res. 2011, 30, 141–144. [Google Scholar] [CrossRef]
- Murphy, M.P.; Saunders, A.; Moreira, C.; Rizzi, A.A.; Raibert, M. The Littledog Robot. Int. J. Robot. Res. 2011, 30, 145–149. [Google Scholar] [CrossRef]
- Kolter, J.Z.; Kim, Y.; Ng, A.Y. Stereo Vision and Terrain Modeling for Quadruped Robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2024–2030. [Google Scholar]
- Li, X.; Li, J.; Guo, Y. Foothold selection for quadruped robot based on learning from expert. In Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics, Hefei, China, 27–31 August 2017; pp. 223–228. [Google Scholar]
- Belter, D.; Piotr, S. Rough terrain mapping and classification for foothold selection in a walking robot. J. Field Robot. 2011, 28, 497–528. [Google Scholar] [CrossRef]
- Mitchell, B.; Hofmann, A.G.; Williams, B.C. Search-based Foot Placement for Quadrupedal Traversal of Challenging Terrain. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1461–1466. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 90 | |
| 2 | 90, | |||
| 3 | 0 | 0, | ||
| 4 | 0 | 0. |
| Index | ||||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| 7 | ||||
| 8 | ||||
| 9 | ||||
| 10 | ||||
| 11 |
| 92.98541% | 93.8% | 91.145633% | 94.24623% |
| (1.98 m, 1.73 m) | (2.01 m, 1.13 m) | (1.02 m, 1.73 m) | (0.99 m, 1.13 m) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Gao, H.; Zha, F.; Li, J.; Wang, Y.; Guo, Y.; Wang, X. Learning the Cost Function for Foothold Selection in a Quadruped Robot. Sensors 2019, 19, 1292. https://doi.org/10.3390/s19061292
Li X, Gao H, Zha F, Li J, Wang Y, Guo Y, Wang X. Learning the Cost Function for Foothold Selection in a Quadruped Robot. Sensors. 2019; 19(6):1292. https://doi.org/10.3390/s19061292
Chicago/Turabian StyleLi, Xingdong, Hewei Gao, Fusheng Zha, Jian Li, Yangwei Wang, Yanling Guo, and Xin Wang. 2019. "Learning the Cost Function for Foothold Selection in a Quadruped Robot" Sensors 19, no. 6: 1292. https://doi.org/10.3390/s19061292
APA StyleLi, X., Gao, H., Zha, F., Li, J., Wang, Y., Guo, Y., & Wang, X. (2019). Learning the Cost Function for Foothold Selection in a Quadruped Robot. Sensors, 19(6), 1292. https://doi.org/10.3390/s19061292