3.1. Measurement of the Wing Beat Signal Generated by A. fraterculus
The experiments performed with
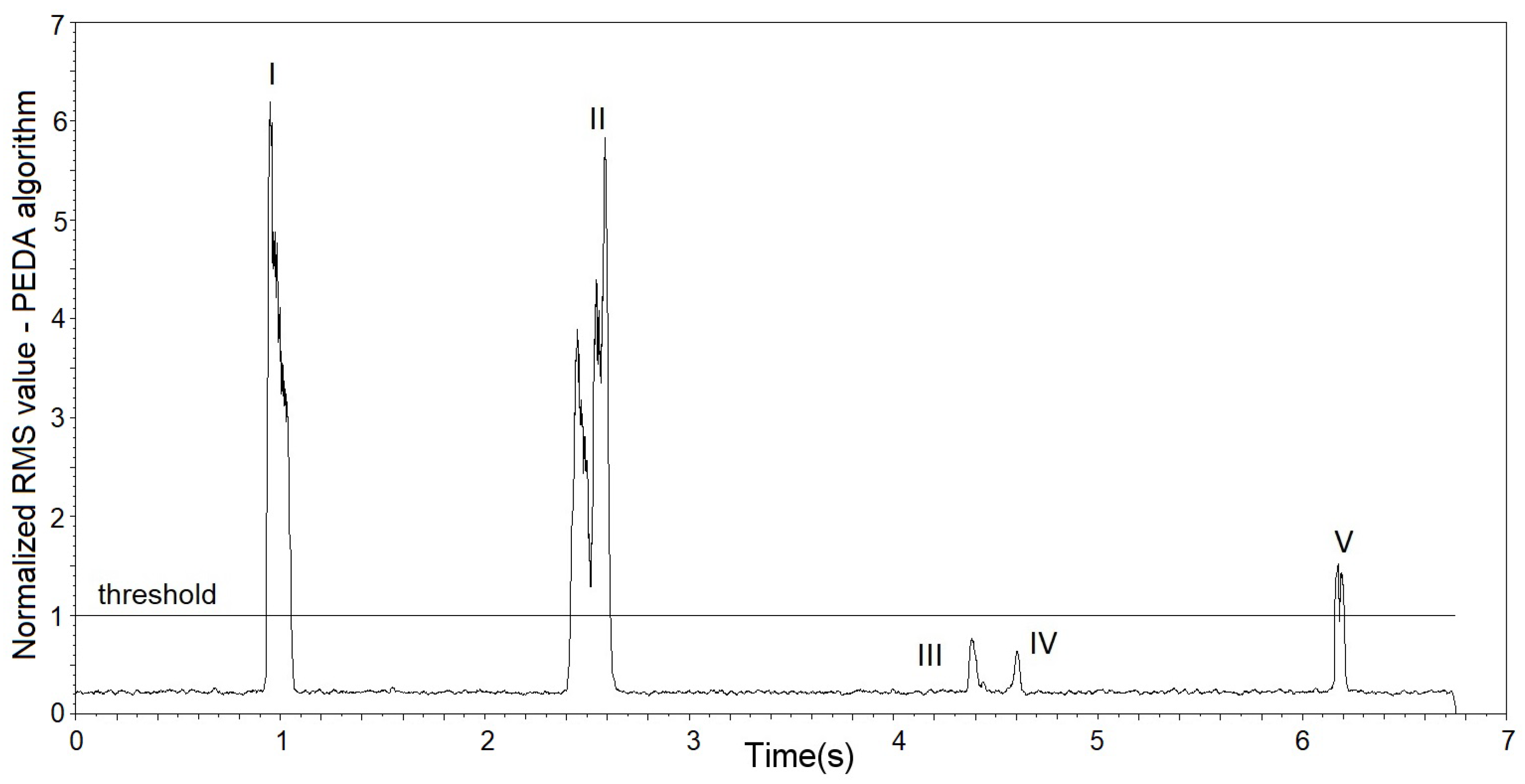
A. fraterculus were recorded at about seventeen hours of signal, separated into seventeen signal tracks of one hour each, for easier signal processing software. Each signal track was submitted to the PEDA algorithm, with 466 possible events of passage. The possible localized passage events were analyzed and classified in the standard group for the characterization of the wing beat signal generated by
A. fraterculus. The localized events were analyzed and classified into a standard group for characterization of the insect signal, and 66 events were selected from the 466 events located (according to the criteria presented in
Section 2.2).
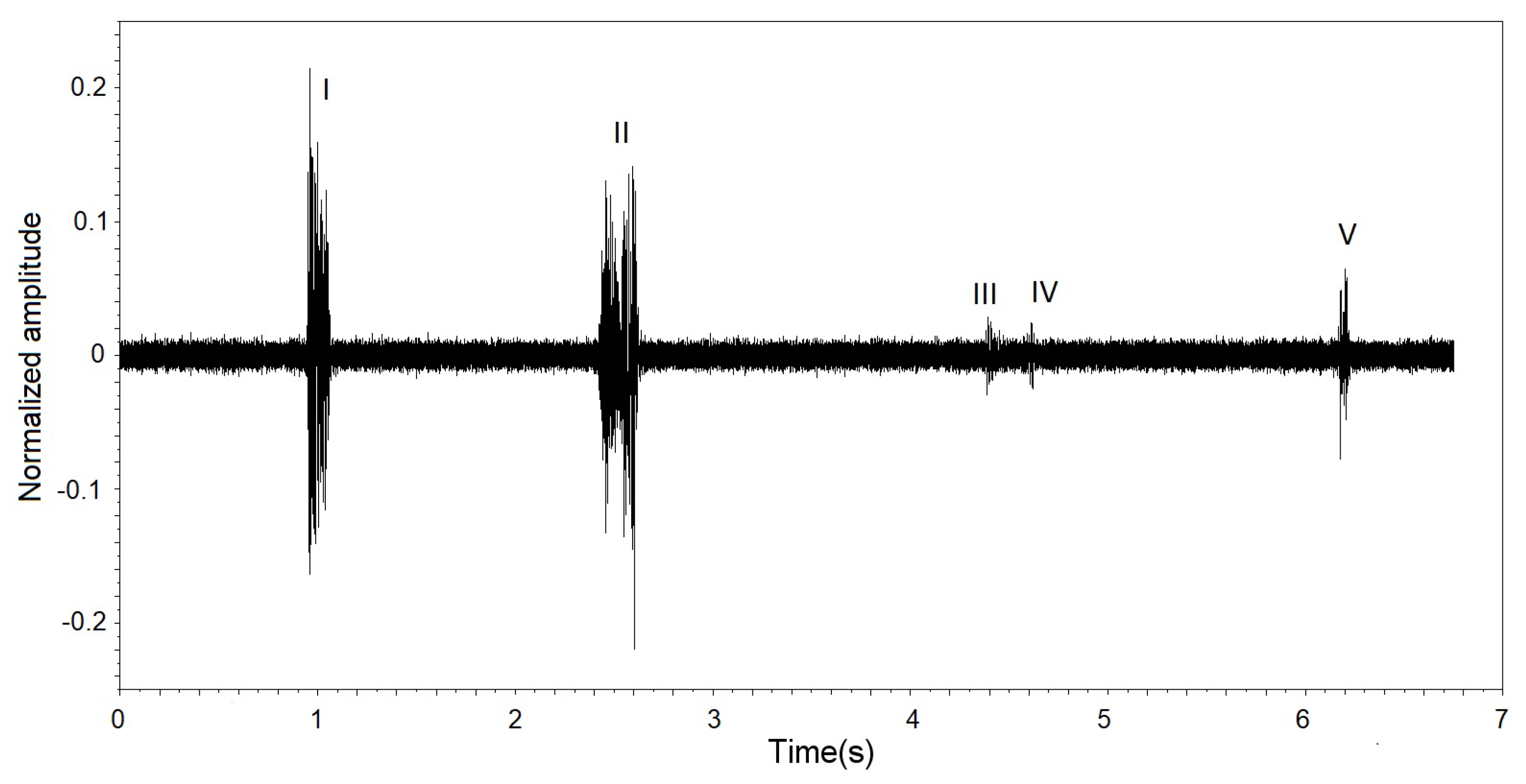
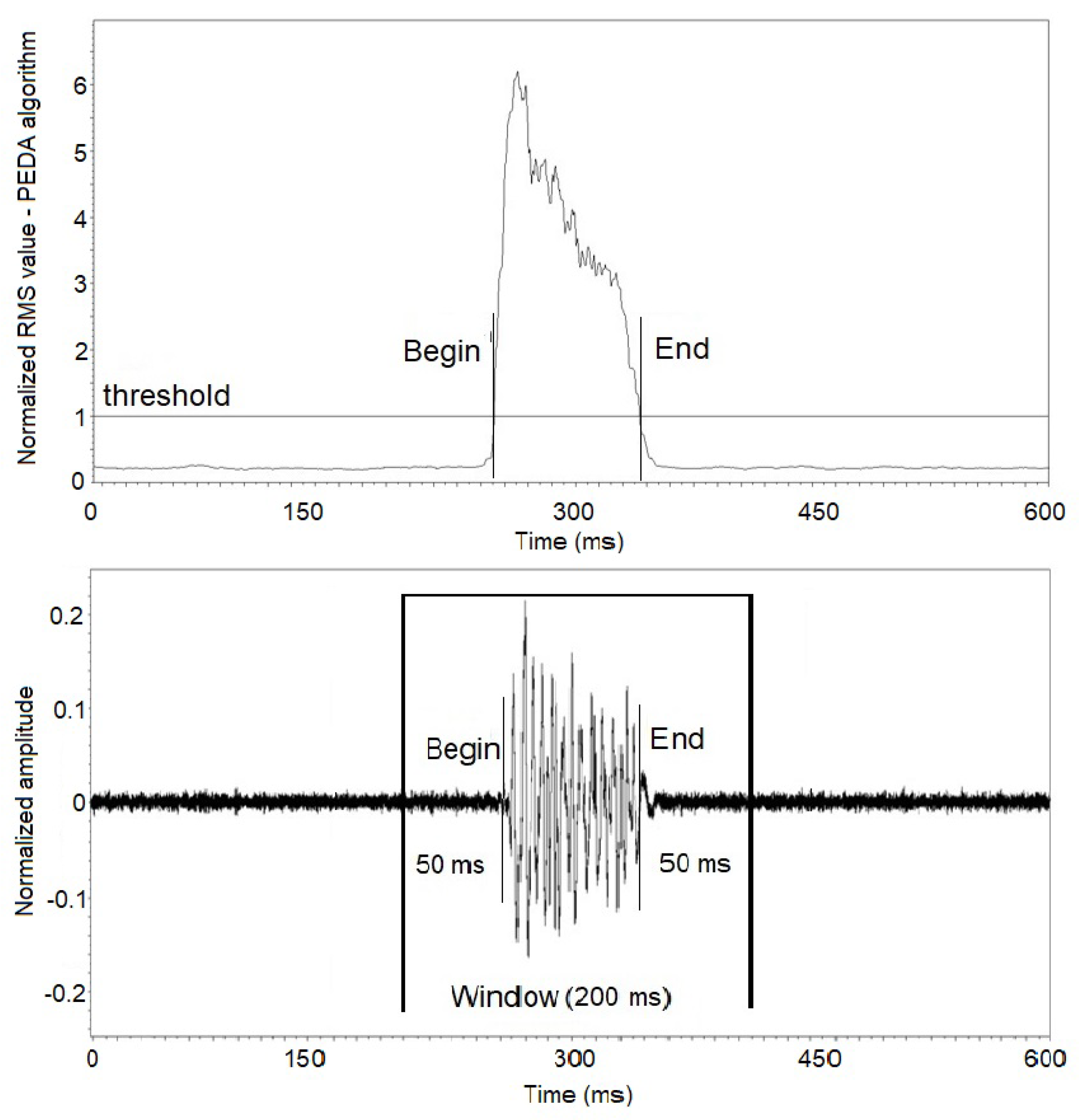
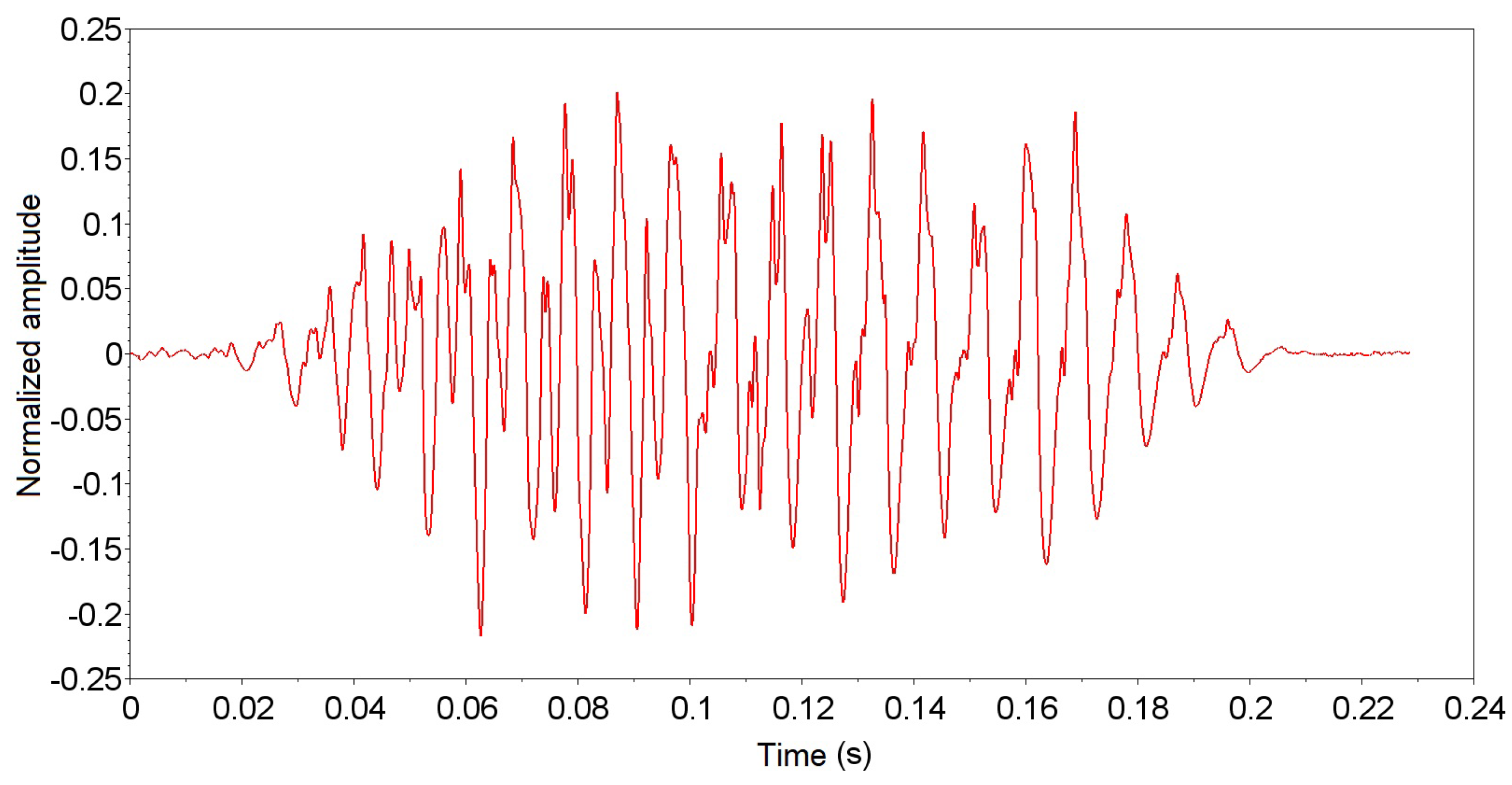
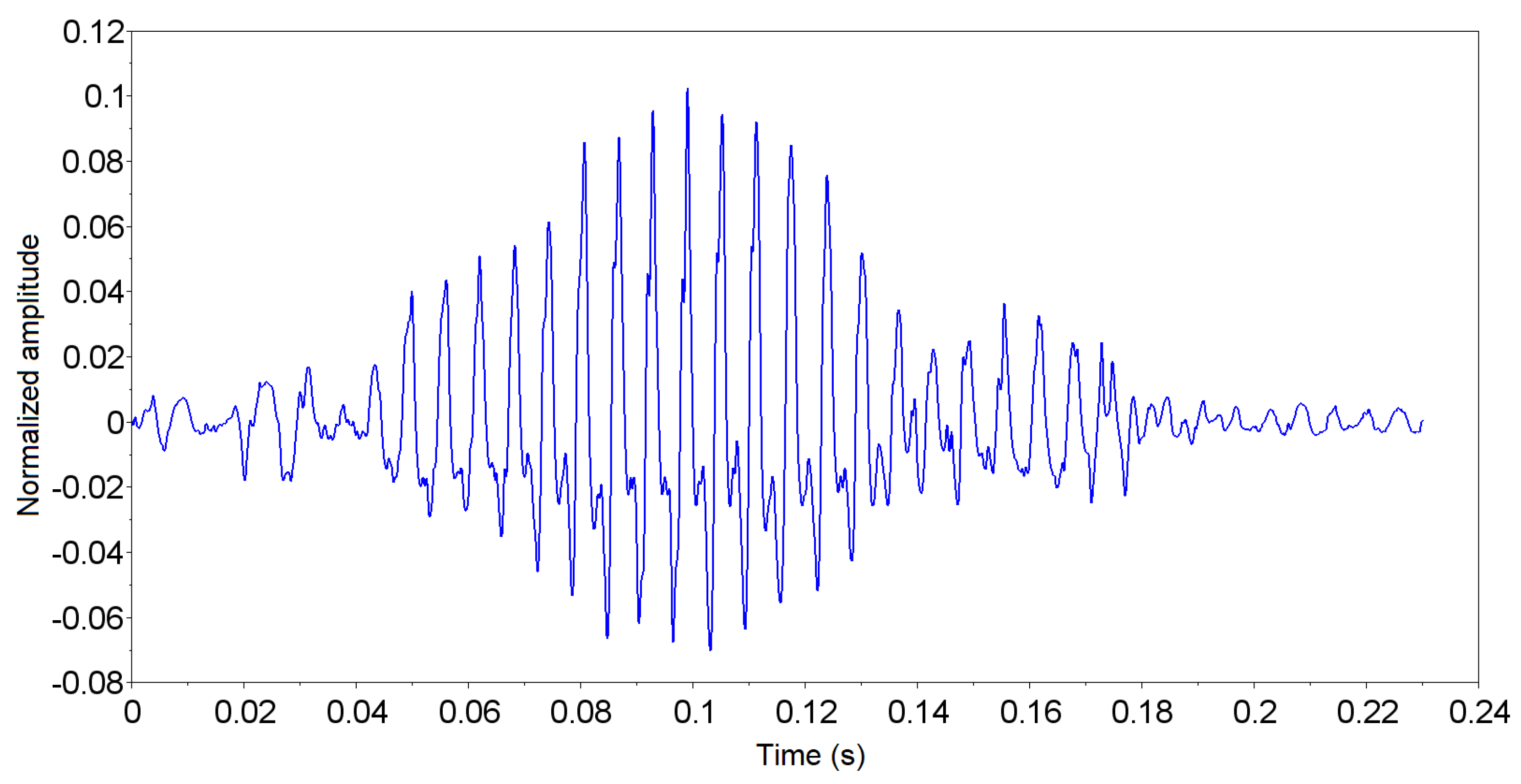
Figure 15 displays an event passing signal of
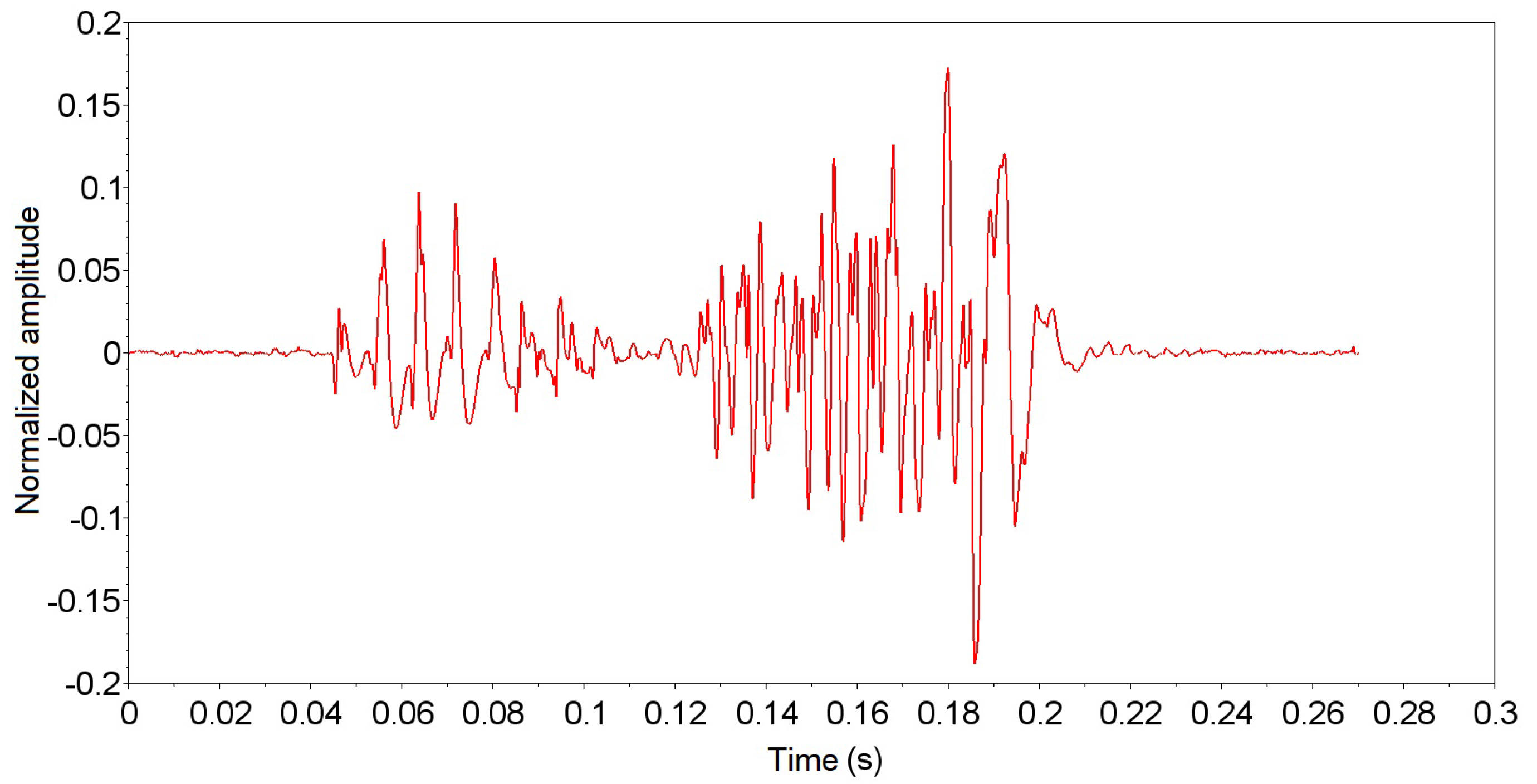
A. fraterculus sorted in the default group, and
Figure 16 displays an unordered event signal in the default group. The unclassified event signal in the standard group was discarded for having a decrease in signal strength (time 0.12 s), despite having a duration greater than 100 ms. This decrease in signal intensity represents that the insect did not make a direct passage through the sensor.
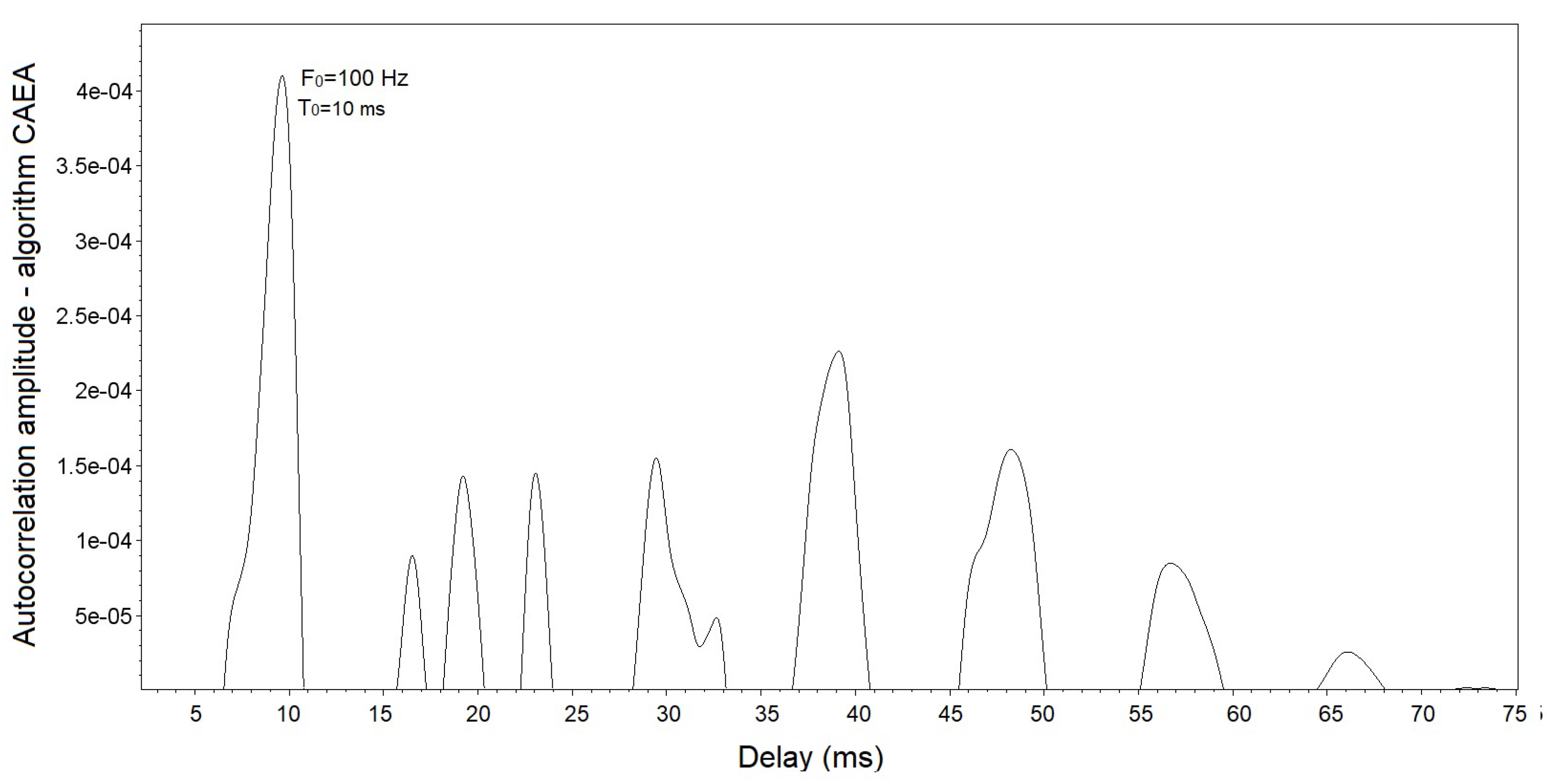
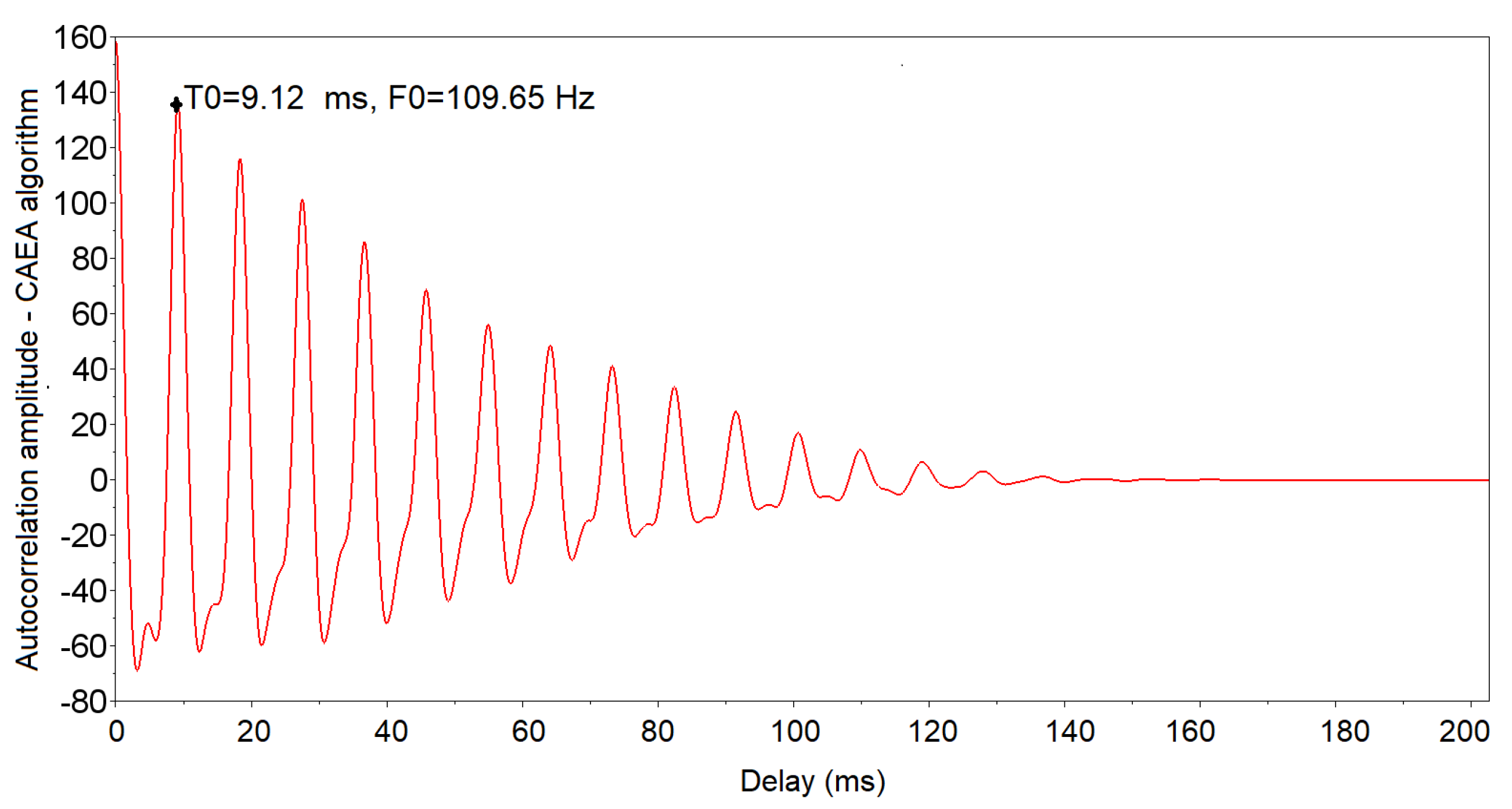
The 66 events of the standard group were analyzed and the characteristics of the signals were extracted using the CAEA algorithm.
Figure 17 shows the output resulting from the CAEA algorithm (autocorrelation method) of one of these events. Note that the CAEA algorithm output highlights the fundamental period of the signal (peak of greater amplitude), the calculation of its inverse to obtain the fundamental frequency being necessary. Thus, the fundamental period (T0) of 9.12 ms corresponding to the fundamental frequency (F0) of 109.65 Hz was obtained.
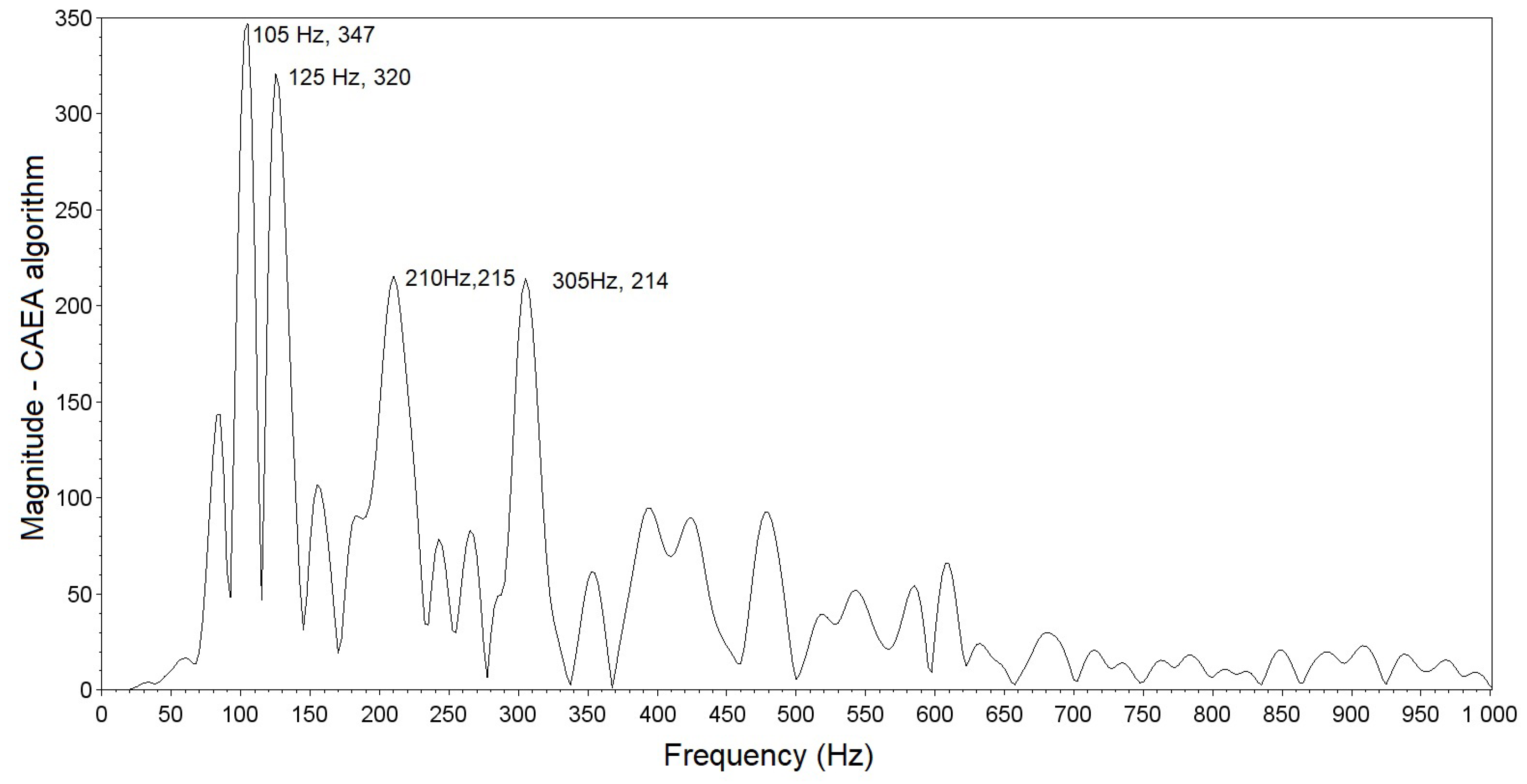
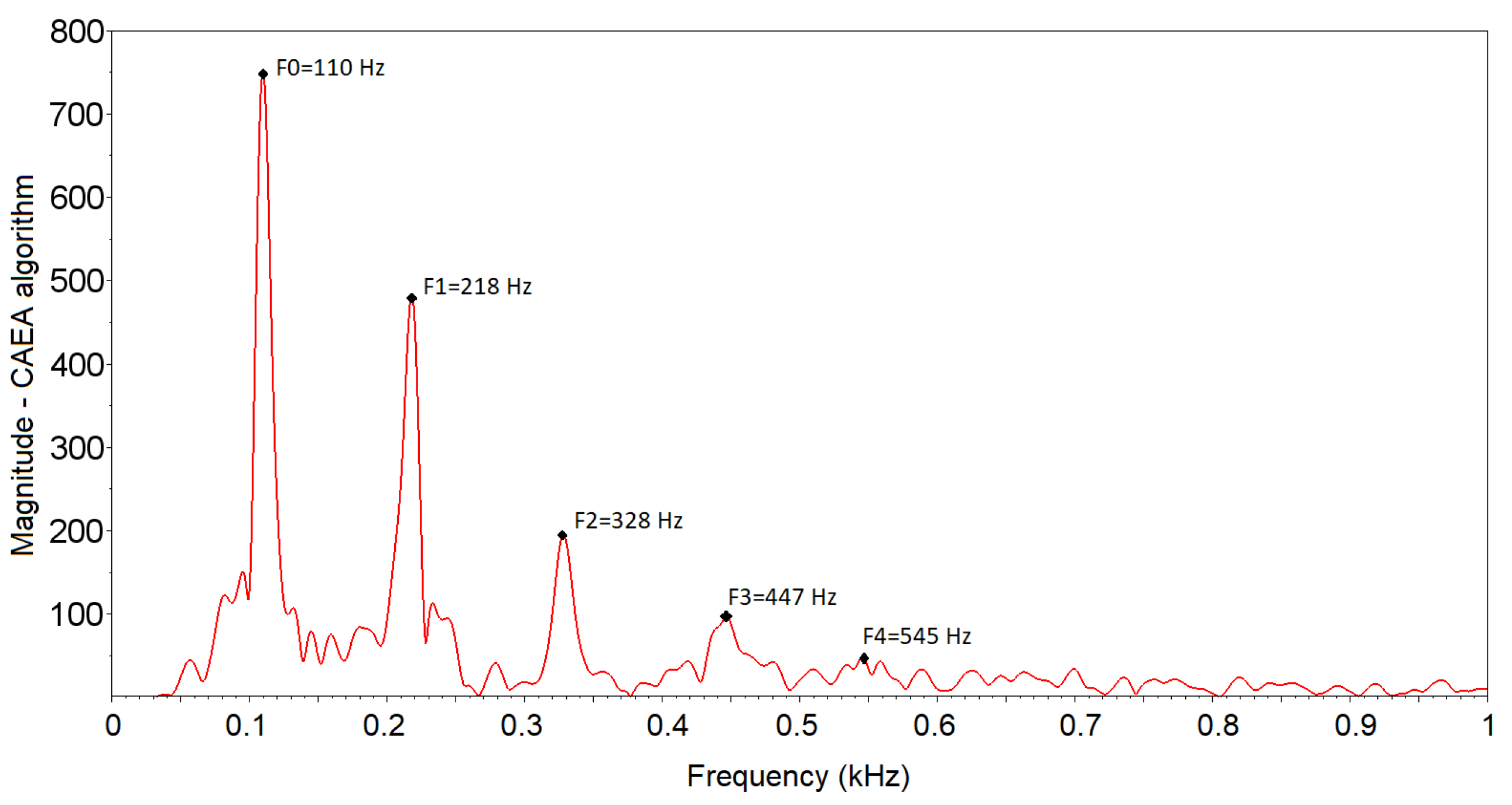
At the output of the CAEA algorithm (FFT method), the five highest peaks corresponding to the fundamental frequency (F0), 2nd component (F1), 3rd component (F2), 4th component (F3) and 5th component (F4), respectively, were detected
Figure 18. The values obtained with the algorithm are 110 Hz (fundamental frequency), 218 Hz (2nd component), 328 Hz (3rd component), 447 Hz (4th component) and 545 Hz (5th component). It was observed that, for the 4th component and 5th component, a degradation of the signal occurs that makes it difficult to correctly detect the corresponding peaks. This degradation of the signal occurs due to the use of the phototransistor as a receiver element, as already observed by [
11,
15].
The data obtained by extracting the characteristics of the signals from the 66 events of passage of the standard group of
A. fraterculus stored in the file were analyzed and the descriptive measures’ complete statistics are presented in
Appendix A.
Table A1 and
Table A2 present the descriptive measures of the data of the complete samples. In addition,
Table A3 and
Table A4 present the descriptive measures with the removal of outliers in each characteristic of the analyzed signal, and we considered data outliers that are outside the minimum and maximum limits of the boxplot.
In the analysis of the complete data without removal of outliers (
Table A1), it was observed that, due to the degradation in the higher frequency frequencies obtained from the signals, as previously reported, there was a difficulty in locating the peaks corresponding to the their components. Thus, it was not possible to use the data for characterization of the signal, since they present great variation between the minimum and maximum values. Thus, the fundamental frequency obtained by the CAEA algorithm (autocorrelation method) (F0 Aut), the fundamental frequency obtained by the CAEA algorithm (FFT method) (F0 FFT) and the frequency obtained by the difference between the frequency of the 2nd componte and the fundamental frequency, both obtained by the CAEA algorithm (FFT method) (F1-F0 Aut), were analyzed.
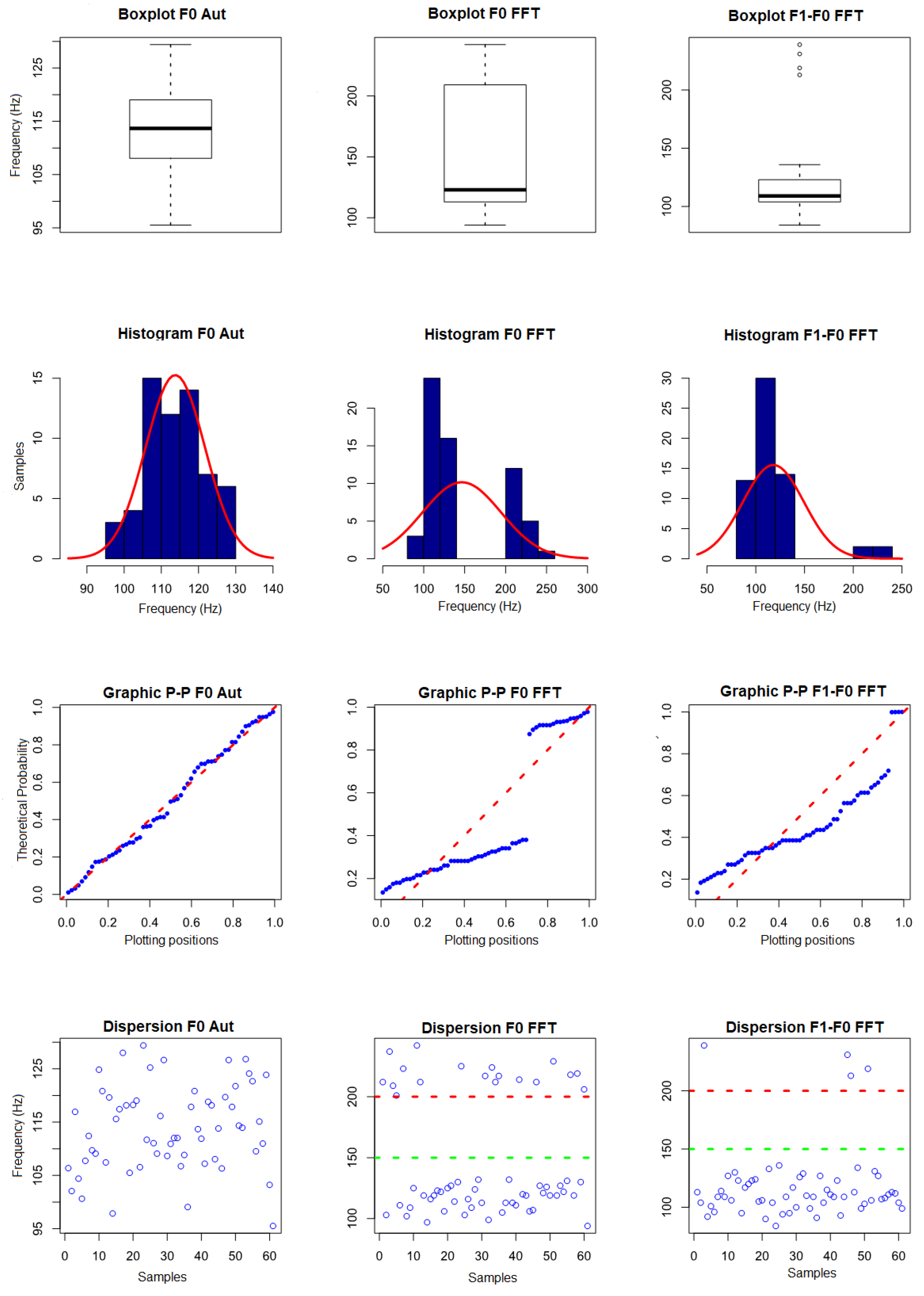
Figure 19 presents the visual evaluation performed.
In the first line of
Figure 19, the boxplot graphics are presented, where, in the measurement of the fundamental frequency by autocorrelation, a symmetrical distribution is observed with the midline in the center of the box, with symmetrical mustaches and slightly longer than the subsections of the box and no outliers data, indicating a normal distribution. In the data concerning the measurement of the fundamental frequency obtained in the CAEA algorithm (FFT method), we observe an asymmetric distribution with the median line near the lower part of the box, asymmetric and short mustaches, a sparse distribution pattern in relation to the medium generating a long box, not presenting data outliers, indicating a distribution that may not be represented by a normal one. In the data concerning the frequency of the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method), an asymmetrical distribution is observed with the median line near the lower part of the box, slightly asymmetrical mustaches and slightly longer than the subsections of the box and four outliers above 200 Hz, indicating that this distribution can be represented by normal distribution.
In the second line of
Figure 19, the histograms (blue) and curve of the superimposed normal (red) distribution are presented. With respect to the data of the first column, it is observed the highest concentration of values near the mean, the distribution being practically symmetrical, with the format of bell, without gaps in the data and without outliers data, indicating a normal distribution. In the second column, we observe the displaced mean being to the right of most of the data, presenting a gap between the data and the left of the mean of a new concentration of data, indicating a non-normal distribution. In the third column, we observe a greater concentration of data slightly to the left of the mean, having some data outliers above 200 Hz, indicating a normal distribution.
In the third line of
Figure 19, we present the P–P graphics with the probability distribution of the sample data (blue) superimposed on the probability distribution of a normal curve (red). In the first column, it is observed that the probability distribution of the data tends to follow the probability distribution of a normal curve, indicating a normal distribution. In the second column, it is observed that the probability distribution of the data does not follow the distribution of probability of a normal curve, with a gap between the data, indicating a non-normal distribution. In the third column, it is observed that the probability distribution of the data does not follow the distribution of probability of a normal curve, with a gap and downward spacing caused by the outliers data, indicating a non-normal distribution.
As a complementary evaluation, the normality test of Shapiro–Wilk was performed, obtaining a p-value of 0.7018 (above the limit of 0.05 for normality) for fundamental frequency by the CAEA algorithm (autocorrelation method), p-value of (below the 0.05 limit for normality) for the fundamental frequency obtained in the CAEA algorithm (FFT method) and a p-value of (below the limit of 0.05 for normality) for the frequency of the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method). Based on the visual evaluation and the Shapiro–Wilk normality test, it was found that the fundamental frequency data obtained by the CAEA algorithm (autocorrelation method) can be represented by a normal distribution, the fundamental frequency data obtained by the peak location in the CAEA algorithm (FFT method) can not be represented by a normal distribution and that the frequency data obtained by the difference between the frequency of the 2nd component and the fundamental frequency both obtained by the location of its peaks in the CAEA algorithm (FFT method) can not be represented by the normal distribution.
With the results obtained with the normality evaluation, the visual analysis of the data dispersion (fourth line—
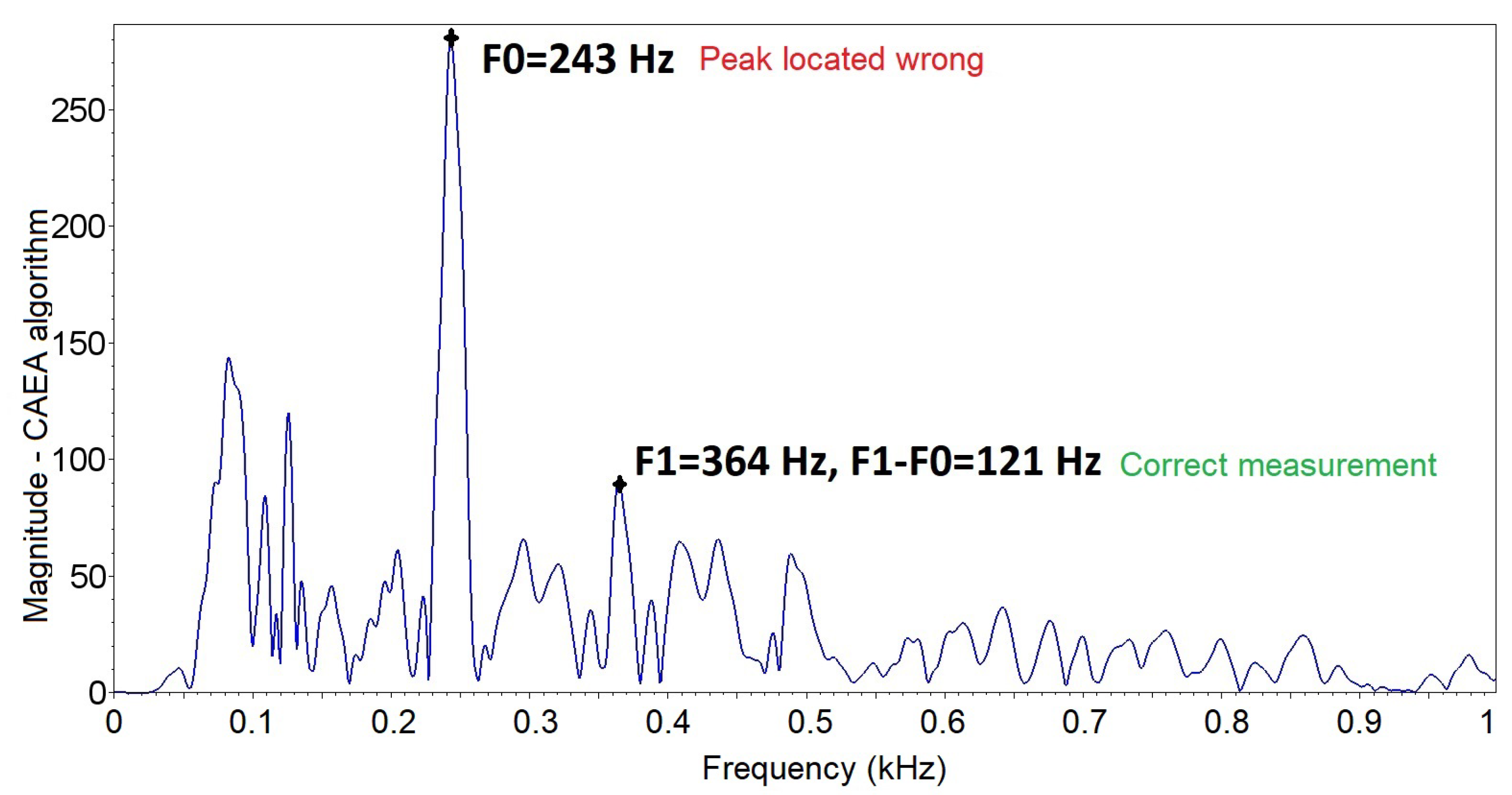
Figure 19) was performed, being observed in the third column that the data are grouped below 150 Hz (green line), with 62 occurrences and above 200 Hz (red line), with four occurrences, these data being considered outliers that can be removed from the dataset. In the second column, the data are grouped below 150 Hz (green line), with 48 occurrences and above 200 Hz (red line), with 18 occurrences. Based on the performed analyses, it is noted that data above 200 Hz, although not considered outliers, represent that the localized peak does not correspond to the fundamental frequency of
A. fraterculus (
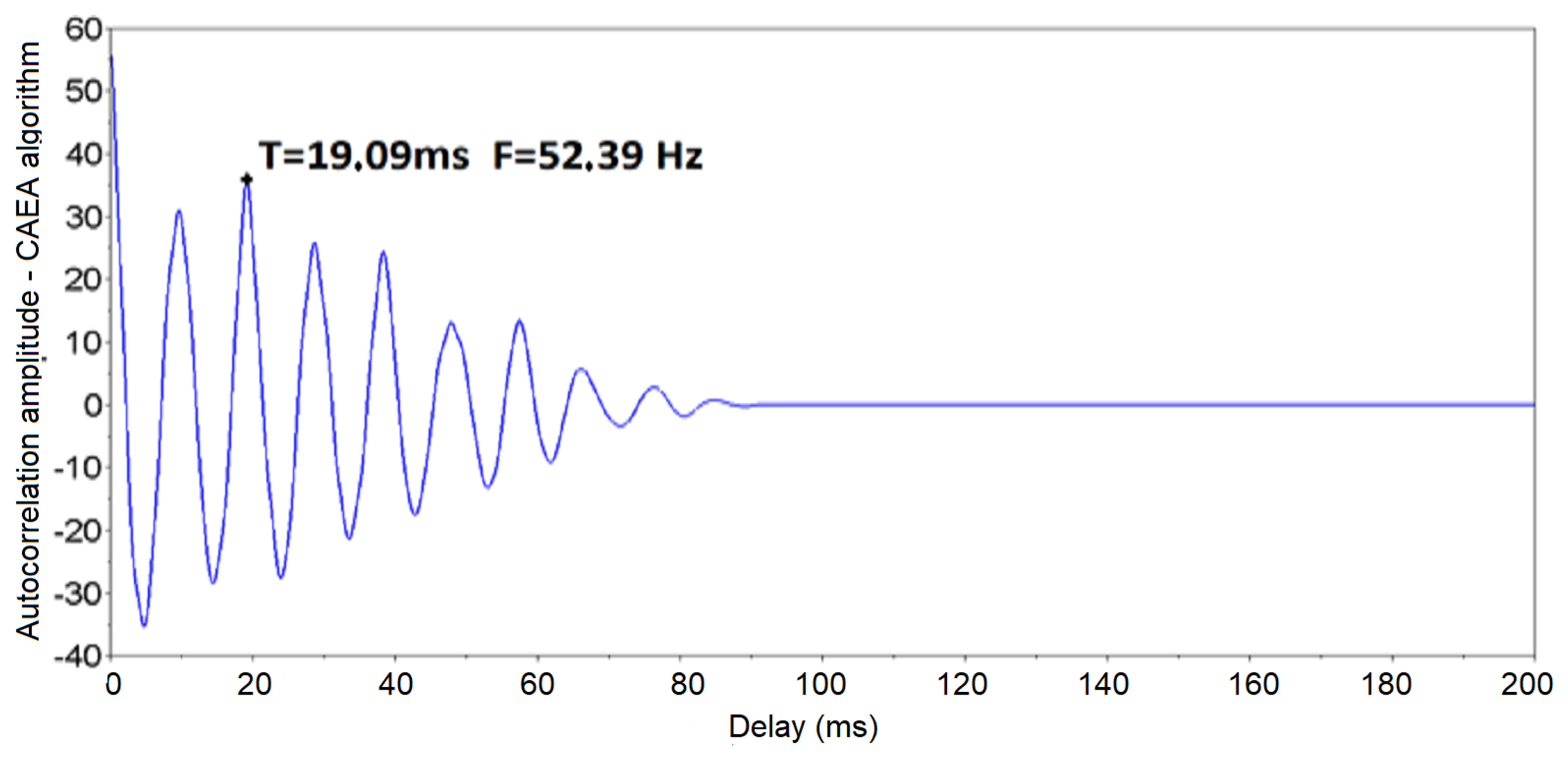
Figure 20)—it being possible to remove them from the dataset. The fundamental frequency obtained by the CAEA algorithm (autocorrelation method) presented errors of evaluation (
Figure 21), in which case the measured value is below the expected one.
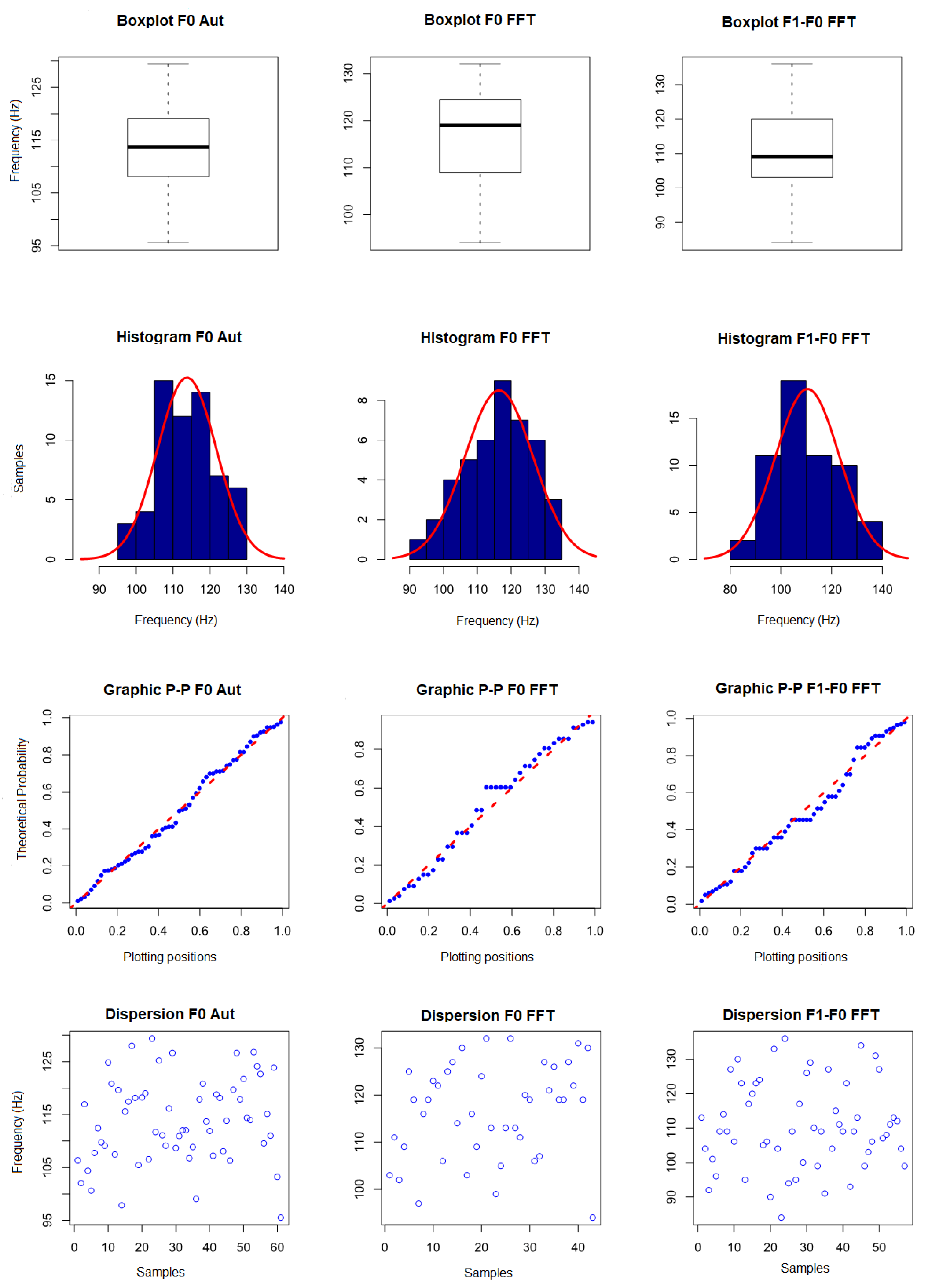
Figure 22 presents the visual evaluation of the data with removal of outliers referring to
Table A3. Each column, from left to right, presents the data for fundamental frequency measurements obtained by the CAEA algorithm (autocorrelation method), fundamental frequency obtained by the location of the peak in the CAEA algorithm (FFT method) and the frequency obtained by the difference between the frequency of the 2nd component and the fundamental frequency both obtained by the location of their peaks in the CAEA algorithm (FFT method). The results for the fundamental frequency obtained by the CAEA algorithm (autocorrelation method) were not altered, once they did not have outliers data, kept for comparison with the data obtained with the removal of the outliers of the fundamental frequency obtained in the CAEA algorithm (FFT method) and the frequency by the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method).
In the first line of
Figure 22, the boxplot graphics are displayed. In the data concerning the measurement of the fundamental frequency obtained in the CAEA algorithm (FFT method), second column, a slightly asymmetrical distribution is observed with the median line near the upper part of the box, slightly asymmetrical mustaches and no outliers data, indicating that this distribution may be normal. In the data concerning the frequency of the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method), third column, a slightly asymmetrical distribution is observed with the median line near the lower part of the box, slightly asymmetrical mustaches and slightly longer than the subsections of the box and without outliers, indicating that this distribution may be normal. In relation to the fundamental frequency boxplot by the CAEA algorithm (autocorrelation method), the first column, the graph with the greatest similarity is the one in the third column, and the one in the second column presents a larger dispersion data and with a larger average.
In the second line of
Figure 22, the histograms (blue) and curve of the superimposed normal distribution (red) are shown. In the second column, we observe the highest concentration of values close to the average with a longer tail on the left, with the bell format, with no data gaps and no outliers data, indicating a normal distribution. In the third column, we observe the highest concentration of near-average values with a longer tail on the right, with the bell shape, without gaps in the data and without outliers data, indicating a normal distribution. In comparison with the histogram of the first column, the similarity between its distributions is observed, being that in the second and third columns the distribution is more sparse.
In the third line of
Figure 22, we present the P–P graphics with the probability distribution of the sample data (blue) superimposed on the probability distribution of a normal curve (red). In the second and third columns it is observed that the probability distribution of the data tends to follow the probability distribution of a normal curve, indicating that both can be represented by a normal distribution.
The Shapiro–Wilk normality test was performed as a complementary assessment, obtaining a p-value of 0.2211 (above the limit of 0.05 for normality) for the fundamental frequency obtained by the CAEA algorithm (FFT method) and a p-value of 0.287 (above the limit of 0.05 for normality) for the frequency of the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method). Based on the visual evaluation and the Shapiro–Wilk normality test it was observed that the fundamental frequency data obtained by the peak location in the CAEA algorithm (FFT method), considering the erroneous detections as outliers, can be represented by a normal distribution and the frequency data obtained by the difference between the frequency of the 2nd component and the fundamental frequency both obtained by the location of its peaks in the CAEA algorithm (FFT method), without the outliers data, can be represented by the normal distribution.
Due to sample sizes (66 for fundamental frequency by the CAEA algorithm (autocorrelation method), 46 for fundamental frequency by FFT and 62 for frequency by difference between peaks in FFT) and that the data can be represented by a normal distribution, the T- Student to obtain the confidence interval of the population mean, considering a confidence level of 95%.
Considering that the best results obtained the A. fraterculus wing beat signal as having a fundamental frequency by the CAEA algorithm (autocorrelation method) with the population mean of 113.75 ± 2.04 Hz with a confidence level of 95%, with a dispersion given by the standard deviation of 7.97 Hz, with a slight flattening (kurtosis coefficient of −0.54) and practically symmetric (asymmetry coefficient of −0.05) with respect to a normal distribution and with values in the range of 95.52 Hz to 129.38 Hz. For measurement by fundamental frequency obtained by the location of the peak in the CAEA algorithm (FFT method), the signal has a population mean of 116.40 ± 3.10 Hz with a confidence level of 95%, with a dispersion given by the standard deviation of 10.09 Hz, with a slight flattening (kurtosis coefficient of −0.72) and slightly asymmetric (asymmetry coefficient of −0.35) with respect to a normal distribution and with values in the range of 94.00 Hz to 132.00 Hz. In the case of measurement of the frequency by the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method), the signal has a population mean of 110.50 ± 3.33 Hz with a confidence level of 95%, with a dispersion given by the standard deviation of 12.56 Hz, with a slight flattening (kurtosis coefficient of −0.64) and slightly asymmetric (coefficient of asymmetry of 0.19) with respect to a normal distribution and with values in the range of 84.00 Hz to 136.00 Hz.
Due to the difficulty of locating the higher frequency components, it was not possible to use their data for the characterization of the signal, since they present great variation in their minimum and maximum values. Thus, only the relationship between the magnitude of the fundamental frequency and the magnitude of 2nd component, obtaining a sample mean of 2.26, with a dispersion given by the standard deviation of 0.75, with a slight flattening (kurtosis coefficient of −0.66) and slightly asymmetric (coefficient of asymmetry of 0.44) with respect to a normal distribution and with values in the range of 1.07 to 3.92.
3.2. Measurement of the Wing Beat Signal Generated by C. capitata
In the experiments performed with
C. capitata were recorded at about seventeen hours of signal, separated into seventeen signal tracks of one hour each, to facilitate signal processing realized. Each signal track was submitted to the PEDA algorithm, with 1010 possible events of passage. The possible localized passage events were analyzed and classified in the standard group for the characterization of the wing beat signal generated by
C. capitata. In addition, 111 passing events were selected, (
Figure 23), from the 1010 possible events of passage located (according to the criteria presented in
Section 2.2).
The data obtained by extracting the characteristics of the signals from the 111 events of passage of the standard group of
C. capitata using the CAEA algorithm were analyzed and the descriptive measures complete statistical are presented in
Appendix A.
Table A5 and
Table A6 present the descriptive measures of the data of the complete samples. In the
Table A7 and
Table A8, the descriptive measures with the removal of outliers in each characteristic of the analyzed signal, we considered data outliers that are outside the minimum and maximum limits of the boxplot.
In the analysis of the complete data without removal of outliers (
Table A5), it was observed that, due to the degradation in the higher frequency frequencies obtained from the signals, there was a difficulty in locating the peaks corresponding to the their components. Thus, it was not possible to use the data for characterization of the signal, since they present great variation between the minimum and maximum values. Thus, the fundamental frequency obtained by the CAEA algorithm (autocorrelation method) (F0 Aut), the fundamental frequency obtained by the CAEA algorithm (FFT method) (F0 FFT) and the frequency obtained by the difference between the frequency of the 2nd component and the fundamental frequency, both obtained by the CAEA algorithm (FFT method) (F1-F0 Aut), were analyzed.
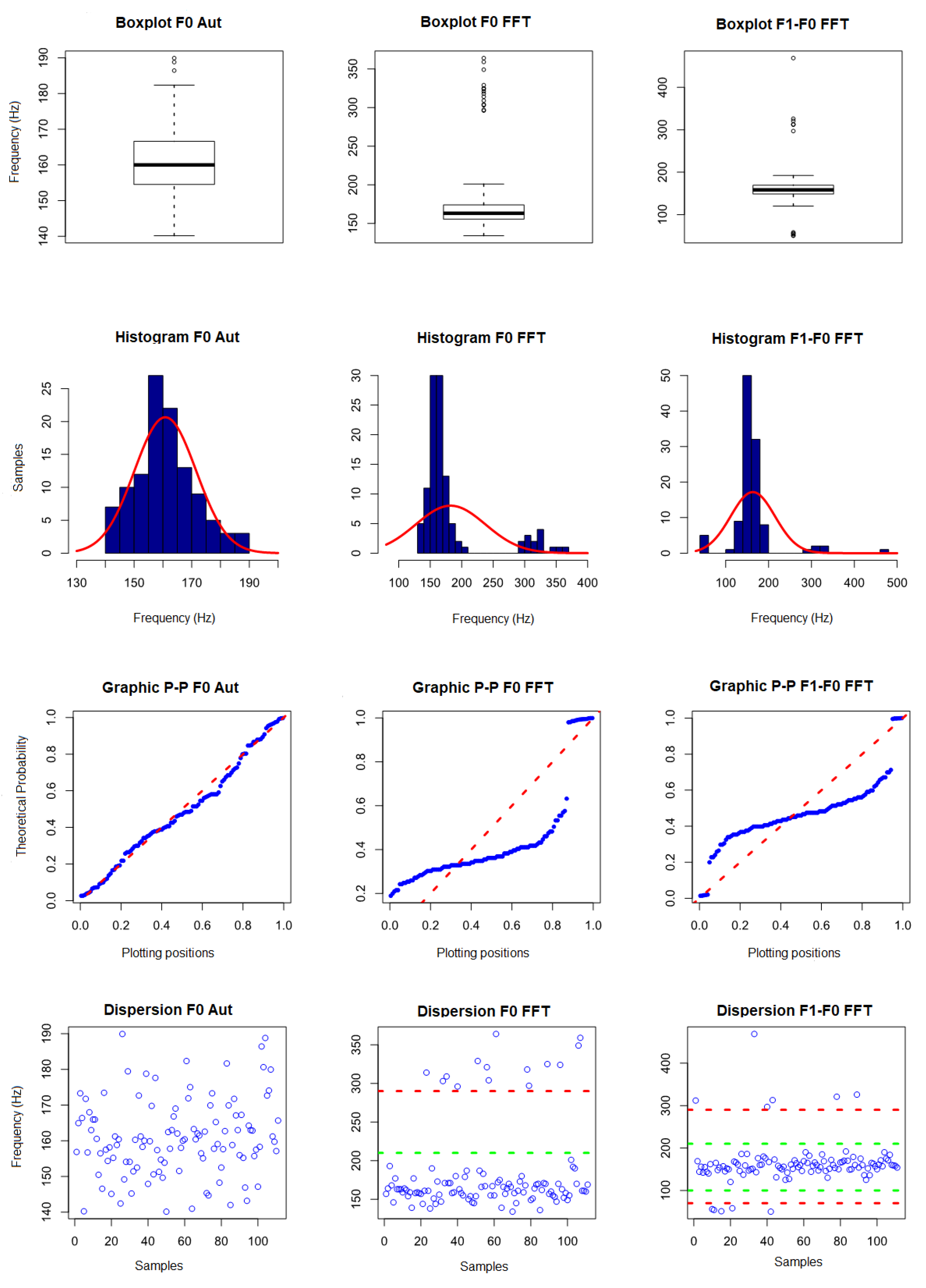
Figure 24 presents the visual evaluation performed.
In the measurement of the fundamental frequency by the CAEA algorithm (autocorrelation method), three data (186.41 Hz, 188.79 Hz and 189.41 Hz) were observed above the maximum limit for outliers (184.7 Hz), in the measurement of the fundamental frequency obtained in the CAEA algorithm (FFT method), the second column, we observed 14 data (with values from 303 Hz to 364 Hz) with possibilities of being outliers (maximum limit 201.75 Hz), in the measurement of the frequency by the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method) were observed four data (with values from 50 Hz to 58 Hz) and six data (with values from 297 Hz to 469 Hz) with the possibility of being outliers (lower limit 117.75 Hz and upper limit 199.75 Hz). Based on the boxplot graphics, the data with removal of the outliers indicate that the possibility of being represented by a normal distribution.
In the second line of
Figure 24, the histograms (blue) and curve of the superimposed normal distribution (red) are shown. With respect to the data of the first column, the highest concentration of values near the mean is observed, distribution being practically symmetrical, with the bell format, without data gaps and without outliers data, indicating a normal distribution. In the second column, we observe the displaced mean being to the right of most of the data, presenting a gap between the data with a new concentration of data (possible outliers) to the left of the mean, indicating a non-normal distribution. In the third column, we observe a higher concentration of values near the mean, having outliers data above 250 Hz and below 80 Hz, indicating a non-normal distribution.
In the third line of
Figure 24, we present the P–P graphics with the probability distribution of the sample data (blue) superimposed on the probability distribution of a normal curve (red). In the first column, it is observed that the probability distribution of the data tends to follow the probability distribution of a normal curve, indicating a normal distribution. In the second column, it is observed that the probability distribution of the data does not follow the distribution of probability of a normal curve, with a gap between the data, indicating a non-normal distribution. In the third column, it is observed that the probability distribution of the data does not follow the probability distribution of a normal curve, having gaps in the lower and upper part, indicating a non-normal distribution.
As a complementary evaluation, the Shapiro–Wilk normality test was performed. A p-value of 0.08254 (above the 0.05 limit for normality) was obtained for fundamental frequency by the CAEA algorithm (autocorrelation method), a p-value of (below the limit of 0.05 for normality) was obtained for fundamental frequency obtained in the CAEA algorithm (FFT method) and frequency for the difference between the 2nd component and the fundamental frequency obtained in frequency spectrum—FFT had a p-value of (below the limit of 0.05 for normality). Based on the visual evaluation and the Shapiro–Wilk normality test, it was found that the fundamental frequency data obtained by the CAEA algorithm (autocorrelation method) can be represented by a normal distribution, the fundamental frequency data obtained by the peak location in frequency spectrum—FFT can not be represented by a normal distribution and the frequency data obtained by the difference between the frequency of the 2nd harmonic and the fundamental frequency both obtained by the location of its peaks in the CAEA algorithm (FFT method) can not be represented by the normal distribution.
With the results obtained with the normality evaluation, the visual analysis of the data dispersion (fourth line—
Figure 24) was performed, it being observed in the third column that the data are grouped between 100 Hz and 200 Hz (green lines), with 100 occurrences and below 70 Hz, five occurrences, and above 280 Hz (red line), six occurrences, the data being considered outliers and can be removed from the dataset. In the second column, the data are grouped below 220 Hz (green line), with 97 occurrences and above 280 Hz (red line), with 14 occurrences. Based on the performed analyses, it is noted that data above 280 Hz represent an error in the location of the peak corresponding to the fundamental frequency, being considered outliers and retired from the set of data. With respect to the scatter plot of the first column, it was observed that the three data with the possibility of being considered outliers (186.41 Hz, 188.79 Hz and 189.41 Hz) are close to the maximum limit obtained by boxpot (184.7 Hz) and do not present discrepancies with the the dispersion pattern presented by the remainder of the data, carrying were not considered outliers. The fundamental frequency obtained by the CAEA algorithm (autocorrelation method) presented evaluation errors, in which case the measured value is below the expected value.
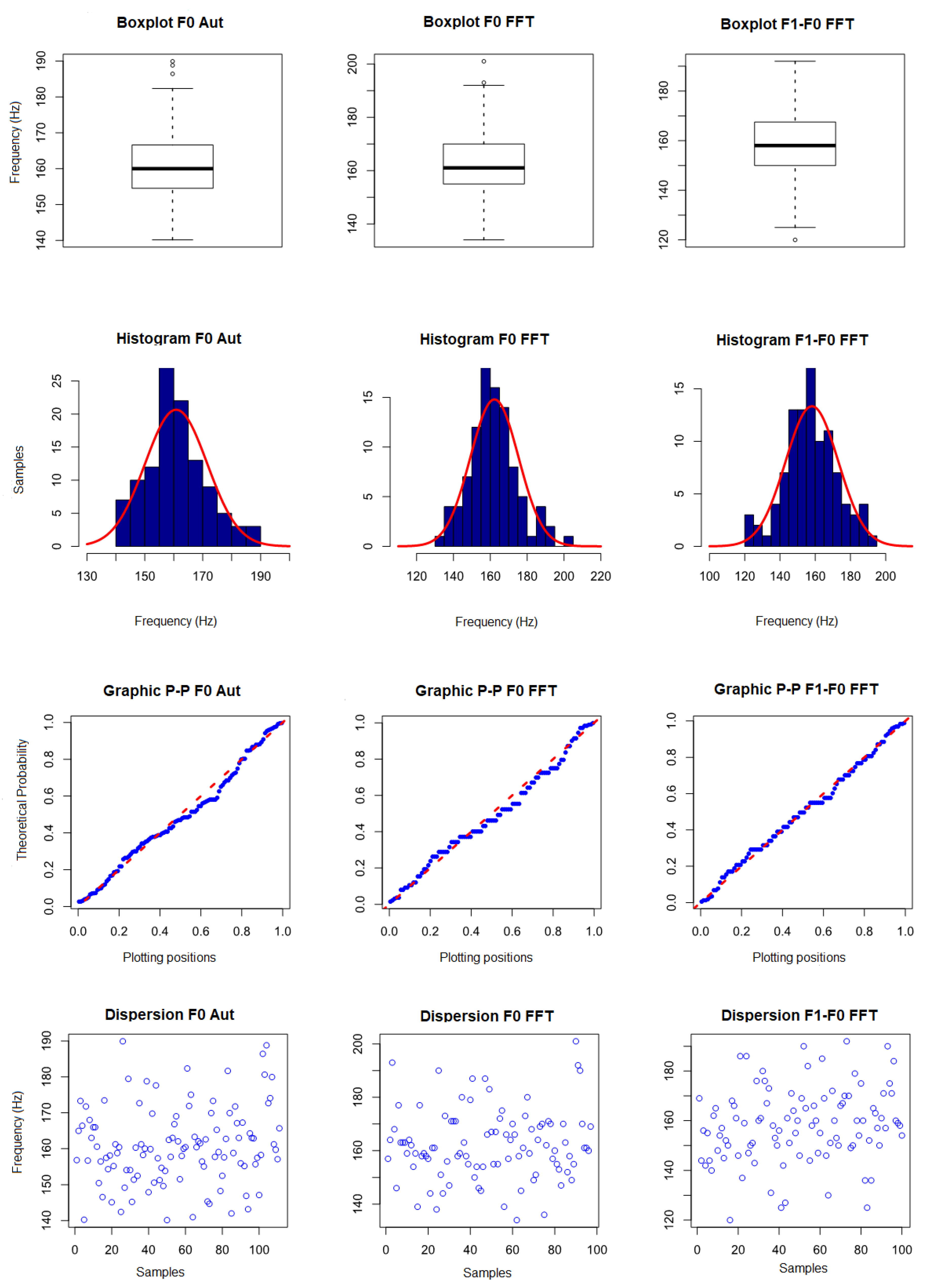
Figure 25 presents the visual evaluation of data with outliers removal. Each column, from left to right, presents the data for fundamental frequency measurements obtained by the CAEA algorithm (autocorrelation method), fundamental frequency obtained by the location of the peak in the CAEA algorithm (FFT method) and the frequency obtained by the difference between the frequency of the 2nd component and the fundamental frequency both obtained by the location of their peaks in the CAEA algorithm (FFT method). The results for the fundamental frequency obtained by the CAEA algorithm (autocorrelation method) were not changed. Once they did not have outliers data, they were kept for comparison with the data obtained with the removal of the outliers of the fundamental frequency obtained in the CAEA algorithm (FFT method) and the frequency by the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method).
In the first line of
Figure 25, the boxplot graphics are shown. In the data concerning the fundamental frequency measurement obtained in the CAEA algorithm (FFT method), the second column, a slightly asymmetrical distribution is observed with the median line near the lower part of the box, slightly asymmetrical mustaches and slightly longer than the subsections of the box and with two data (201 Hz and 193 Hz) slightly above the upper limit (192 Hz) not being considered outliers, indicating that this distribution may be normal. In the data concerning the fundamental frequency of the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method), the third column, a symmetrical distribution is observed, symmetrical mustaches and slightly longer than the subsections of the box and with a die (120 Hz) slightly below the lower limit (124 Hz) not being considered outliers, indicating that this distribution may be normal. In relation to the fundamental frequency boxplot by the CAEA algorithm (autocorrelation method), the first column, the graphics present similarities in their dispersions, with averages and medians nearby.
In the second line of
Figure 25, the histograms (blue) and curve of the superimposed normal distribution (red) are shown. In the second column, we observe the highest concentration of values near the mean with a longer tail on the right, with bell shape, with a small gap above 200 Hz and without outliers data, indicating a normal distribution. In the third column, we observe the highest concentration of values close to the mean with symmetrical distribution, with the bell format, with no data gaps and no outliers data, indicating a normal distribution. In comparison with the histogram of the first column, the similarity between its distributions is observed, being that in the second and third columns the distribution is wider.
In the third line of
Figure 22, we present the P–P graphics with the probability distribution of the sample data (blue) superimposed on the probability distribution of a normal curve (red). In the second and third columns, it is observed that the probability distribution of the data tends to follow the probability distribution of a normal curve, indicating that both can be represented by a normal distribution.
The Shapiro–Wilk normality test was realized as a normality complementary evaluation being obtained a p-value of 0.09642 (above the 0.05 limit for normality) for the fundamental frequency by the CAEA algorithm (FFT method) and a p-value of 0.5932 (above the limit of 0.05 for normality) for the frequency obtained by the difference between the 2nd component and the fundamental frequency by the CAEA algorithm (FFT method). Based on the visual evaluation and the Shapiro–Wilk normality test, it was observed that the fundamental frequency data obtained by the peak location in the CAEA algorithm (FFT method), considering the erroneous detections as outliers, can be represented by a normal distribution and the frequency data obtained by the difference between the frequency of the 2nd component and the fundamental frequency both obtained by the location of its peaks in the CAEA algorithm (FFT method), without the outliers data, can be represented by the normal distribution.
Due to sample sizes (111 for fundamental frequency by the CAEA algorithm (autocorrelation method), 100 for fundamental frequency by the CAEA algorithm (FFT method) and 97 for frequency by difference between peaks by the CAEA algorithm (FFT method)) and that the data can be represented by a normal distribution, the T-Student to obtain the confidence interval of the population mean, considering a confidence level of 95%.
Considering the best results obtained the wing beat signal generated by C. capitata have a fundamental frequency by the CAEA algorithm (autocorrelation method) with the population mean of 160.81±2.02 Hz with a confidence level of 95%, with a dispersion given by the standard deviation of 10.71 Hz, slightly accentuated (kurtosis coefficient of 0.11) and slightly asymmetrical (asymmetry coefficient of 0.41) with respect to a normal distribution and with values in the range of 140.15 Hz to 189.91 Hz. For measurement by the fundamental frequency obtained by location of the peak using the CAEA algorithm (FFT method), the signal has a population mean of 162.25 ± 2.63 Hz with a confidence level of 95%, with a dispersion given by the standard deviation of 13.06 Hz, slightly accentuated (kurtosis coefficient of 0.33) and slightly asymmetric coefficient (asymmetry coefficient of 0.44) with respect to a normal distribution and with values in the range of 134.00 Hz to 201.00 Hz. The frequency by the difference between the 2nd component and the fundamental frequency obtained in the CAEA algorithm (FFT method) it has a population mean of 158.00 ± 2.97 Hz with a confidence level of 95%, with a dispersion given by the standard deviation of 14.95 Hz, with a slight flattening (kurtosis coefficient of -0.03) and slightly asymmetrical (asymmetry coefficient of −0.04) with respect to a normal distribution and with values in the range of 120.00 Hz to 192.00 Hz.
Due to the difficulty of locating the higher frequency components, it was not possible to use their data for the characterization of the signal, since they present great variation in their minimum and maximum values. Thus, it was analyzed only the relationship between the magnitude of the fundamental frequency and the magnitude of the frequency by the difference between the 2nd component and the fundamental frequency, both obtained by the CAEA algorithm (FFT method), being obtained a sample mean of 2.05, with a dispersion given by the standard deviation of 0.96, with an accentuation (kurtosis coefficient of of 2.93) and slightly asymmetric (coefficient of asymmetry of 1.61) in relation to a normal distribution and with values in the range of 1.01 to 6.06.
3.3. Analysis of the Wing Beat Signal Generated by A. fraterculus and C. capitata
In the analysis of the wing beat signal generated by A. fraterculus and C. capitata were utilized the signal characteristics obtained through the CAEA algorithms-autocorrelation method (fundamental frequency), CAEA-FFT method (fundamental frequency) and CAEA-FFT method (frequency measured by the difference between the fundamental frequency and the frequency of the 2nd harmonic).
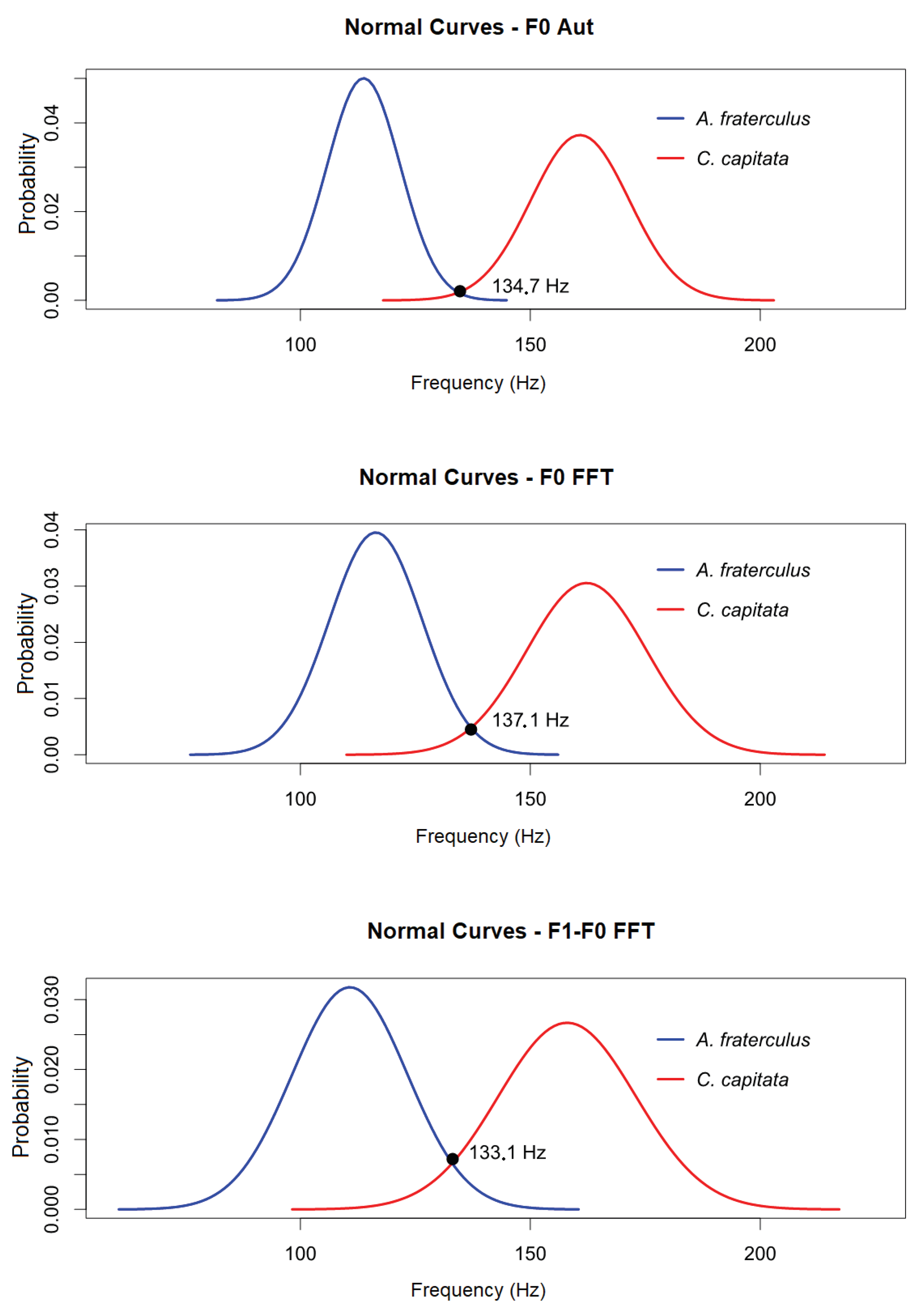
Figure 26 presents the comparison between the normal curves for the fundamental frequencies for
A. fraterculus and
C. capitata obtained through the CAEA algorithm (autocorrelation method), location of the peak in the CAEA algorithm (FFT method) and the frequency relation between the peak of the 2nd component and the peak of the fundamental frequency in the CAEA algorithm (FFT method). Note that a distinction is made between the two species in relation to the fundamental frequency of wing beat and the difference frequency between the 2nd component and the fundamental frequency, despite the overlap in the limit of the normal distributions.
From the evaluation performed, it is possible to obtain the probability that a passing event of A. fraterculus is identified as C. capitata, or vice versa, calculating the cumulative probability for a normal distribution based on the intersection of the curves. With this overlap, a probability of 0.0042 was obtained for the fundamental frequency by the CAEA algorithm (autocorrelation method) that an event of A. fraterculus is identified as C. capitata and a probability of 0.0073 that a C. capitata event is identified as A. fraterculus. For the evaluation with the fundamental frequency obtained by location of the peak in the CAEA algorithm (FFT method), it was obtained a probability of 0.0201 that an event of A. fraterculus is identified as C. capitata and a probability of 0.0270 that a C. capitata event is identified as A. fraterculus. In the case of the evaluation with the frequency obtained by the relation between the peak of the 2nd component and the fundamental frequency peak in the CAEA algorithm (FFT method), a probability of 0.0375 was obtained that an event of A. fraterculus is identified as C. capitata and a probability of 0.0479 that an event of C. capitata be identified as A. fraterculus.
Regarding the analysis of data concerning the magnitudes, C. capitata has a mean magnitude ratio of 1.79 with a dispersion given by the standard deviation of 0.64 and A. fraterculus has a mean magnitude ratio of 2.05 with one dispersion given by the standard deviation of 0.65. Due to the overlapping of values, it is not possible to use the relationship between the magnitude of the fundamental frequency and the magnitude of the 2nd component for species recognition.
Analyzing the signs of events of passage with the methods of the CAEA algorithm, it was possible to extract the characteristics concerning the fundamental frequency (autocorrelation and FFT methods), frequency of the 2nd component (FFT method), the magnitude of the fundamental frequency (FFT method) and magnitude of the 2nd component (FFT method). It was observed that the use of phototransistors as receiving elements did not allow the correct evaluation of the characteristics referring to the 3rd to 5th components. This occurred due to the degradation of the signal spectrum in the upper frequencies that made it difficult to correctly locate the peaks corresponding to the components. This problem was also observed in [
11].
With the characteristics of the extracted signal, the fundamental frequency of the wing beat of fruit flies was obtained using the value obtained by the CAEA algorithm (autocorrelation and FFT methods) and the difference between the frequencies of the 2nd component and the fundamental frequency by the CAEA algorithm (FFT method). Observing the statistical measures performed and the probability of identification errors occurring among the fruit flies analyzed, it was verified that the most effective method to obtain the fundamental frequency of the signal generated by the wing beat is CAEA algorithm (autocorrelation method) followed by obtaining the CAEA algorithm (FFT method) and finally that the frequency measurement of the difference between the 2nd component and the fundamental frequency presented the worst result for the classification.
However, it was observed that all three methods have measurement errors. The CAEA algorithm (autocorrelation method) presented erroneous measurements with values corresponding to half of the expected value for the fundamental frequency.The CAEA algorithm (FFT method) presented erroneous measures for the fundamental frequency with values corresponding to twice the correct fundamental frequency (next to what would be the frequency of the second component). For the frequency measurement of the difference between the 2nd component and the fundamental frequency, the CAEA algorithm (FFT method) presented values below and above that expected for the fundamental frequency. With these measurement errors, an A. fraterculus can be incorrectly identified as a C. capitata using the fundamental frequency obtained by the CAEA algorithm (FFT method), once this error indicates a frequency close to the fundamental frequency of C. capitata, as well as the measurement of the fundamental frequency by the CAEA algorithm (autocorrelation method) of a C. capitata, may present an error that approximately corresponds to the fundamental frequency of A. fraterculus. Therefore, to minimize fundamental frequency measurement errors, the best results are obtained by using the three methods together.

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

























