Automatic Individual Pig Detection and Tracking in Pig Farms




Abstract
1. Introduction
2. Related Work
3. Methods
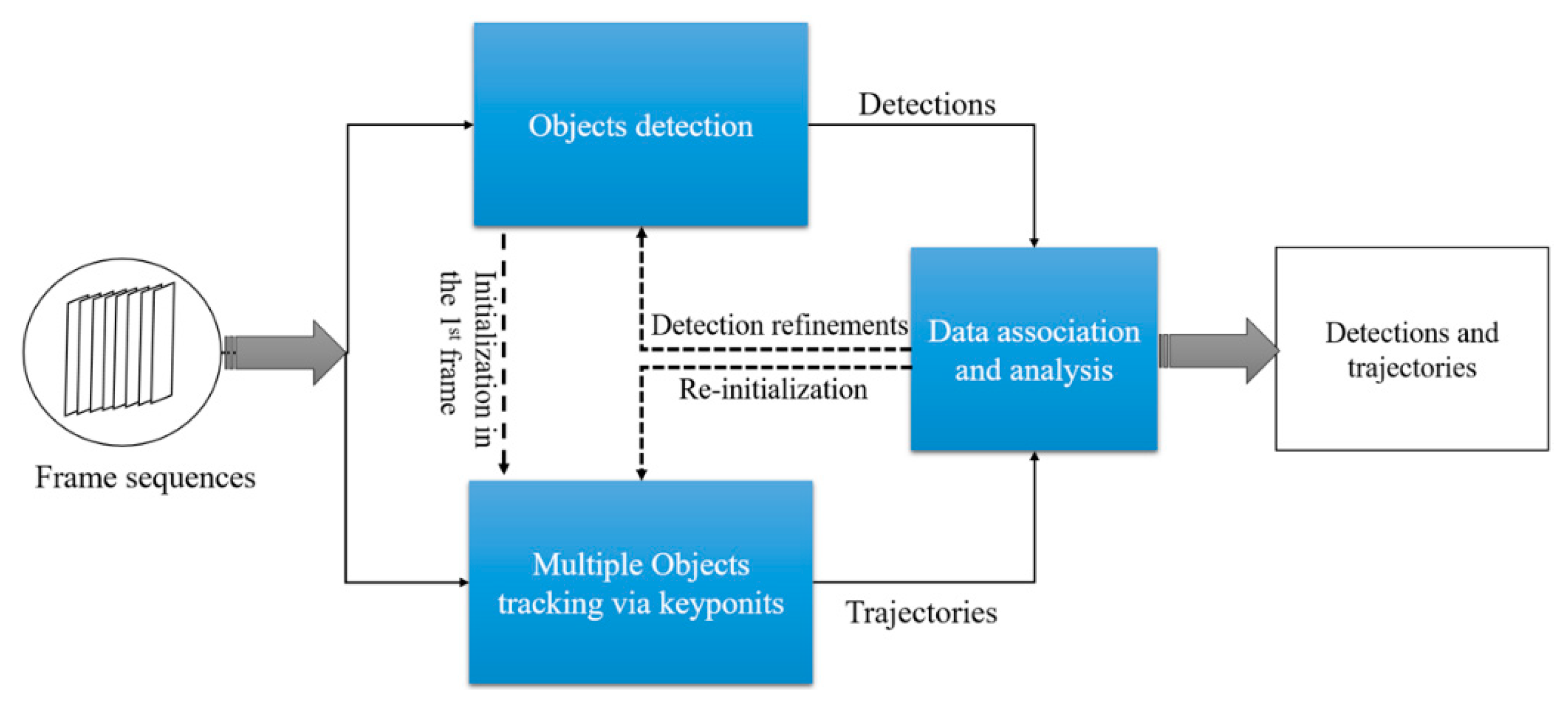
3.1. Method Overview
3.2. CNN Based Object Detection
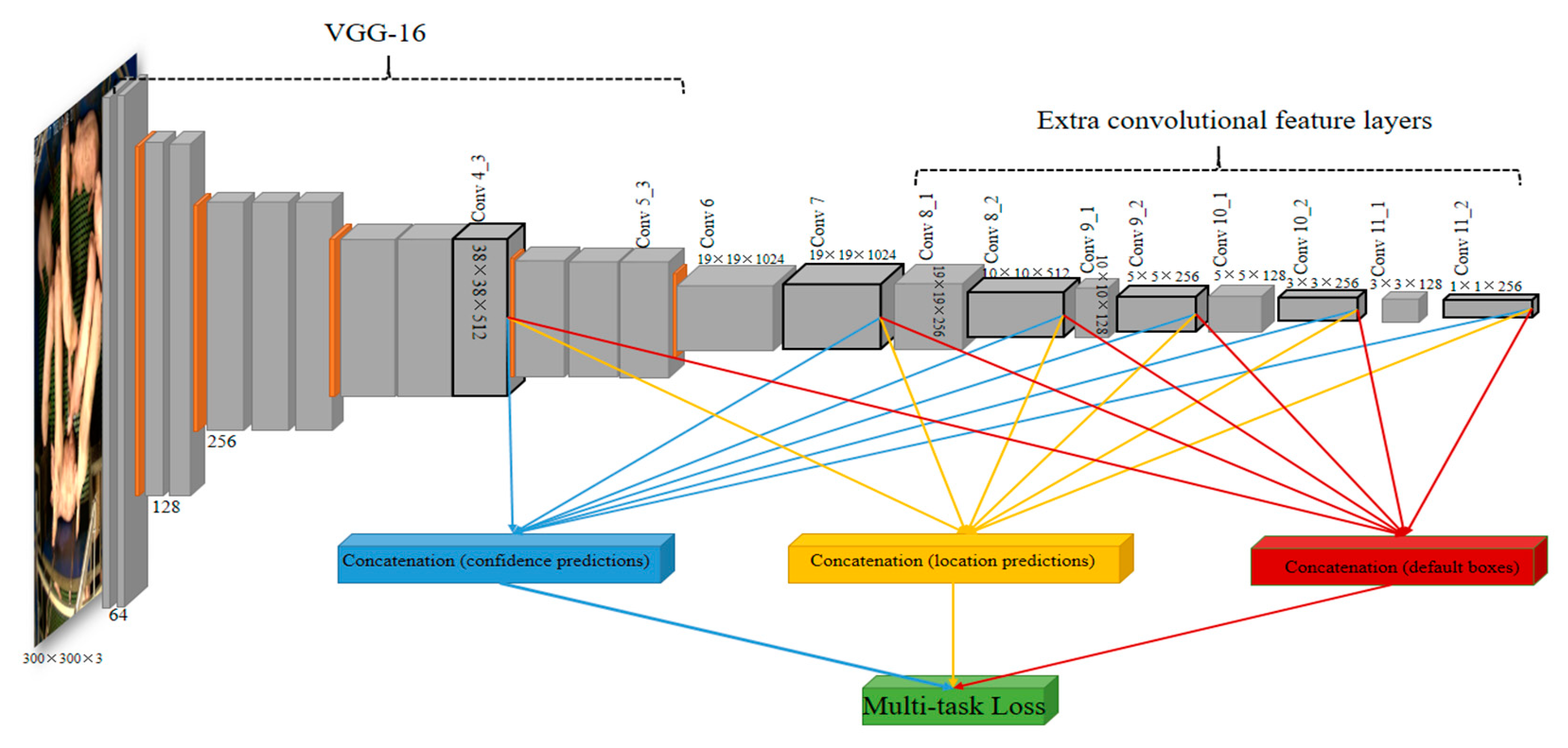
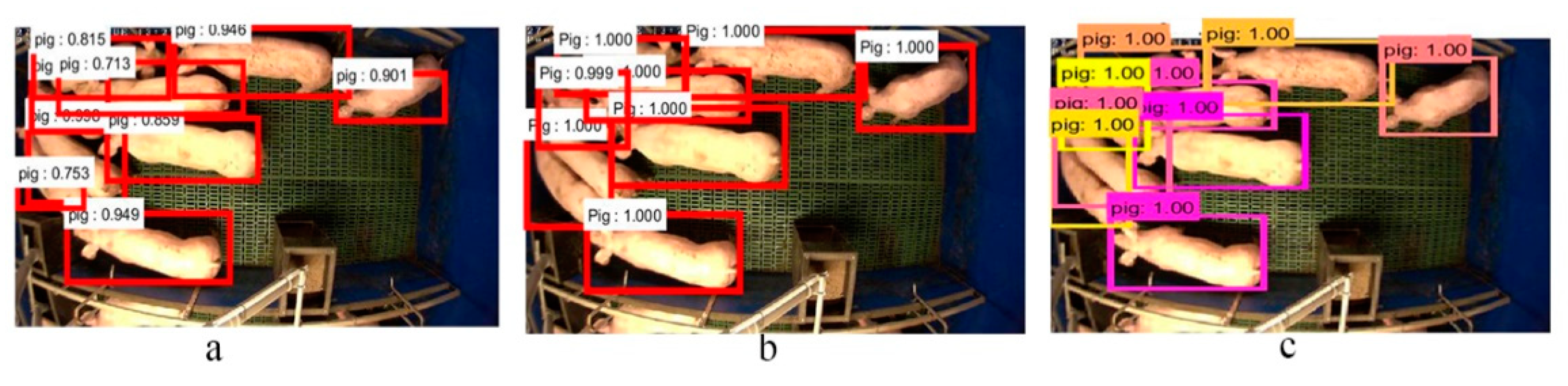
3.3. Pig Detection Using SSD
3.4. Individual Pig Tracking Using Correlation Filter
3.5. Data Association
- (1).
- An object is tracked if a contains only one , which means the one-to-one association between the detection bounding boxes and the tag-boxes has been established. (State: tracked)
- (2).
- An object is not currently tracked due to an occlusion if the is not assigned to any existing tracks, namely the tag-box of the tracker is located out of the default detection bounding box . This will trigger a tag-box initialization scheme. (State: tracking drift [tracking target shifts away from the detection bounding box])
- (3).
- Unstable detection occurs if the which is restrained by the is not assigned to any . This will trigger a detection refinement scheme based on the tracklet derived from the historical detections. (State: unstable detection).
- (4).
- If more than one are assigned to a , it means the tag-box with less assignment confidence is drifting to an associated bounding box. This triggers a tag-box pending process followed by the initialization in condition (2). (State: tracking drift)
| Algorithm 1 our hierarchical data association algorithm | |
| Input: | Current tth frame and previous trajectories |
| The detection bounding boxes computed from the detector described in Section 3.3 | |
| The tag-boxes computed from the tracker described in Section 3.4 | |
| Output: | bounding boxes and trajectories for the tth frame |
| Procedure | |
| 1 | associate the detection bounding boxes to the tag-boxes |
| 2 | If each in is assigned to the corresponding in with one-to-one manner |
| 3 | Return the as tracked bounding boxes and update the tracklets |
| 4 | else |
| 5 | Update the tracklets related to the and return the assigned detection boxes (), unassigned detection boxes () and unassigned tag-boxes (). |
| 6 | end if |
| 7 | for each tag-box in the unassigned tag-boxes |
| 8 | set a default box () to the tag-box according to the updated tracklets; |
| 9 | associate the unsigned detection boxes () to the default box () |
| 10 | if find a best matched box in the |
| 11 | set the best matched box as the tracked bounding box and update the tracklet |
| 12 | else |
| 13 | set the default box as the tracked bounding box and update the tracklet, |
| 14 | end if |
| 15 | associate the unassigned tag-boxes () to the default box () |
| 16 | if no matched tag-box is founded |
| 17 | set a counter array (age), age[] = age[] + 1 |
| 18 | else |
| 19 | age[] = age[] − 1 |
| 20 | end if |
| 21 | if age[] > threshold value (T) |
| 22 | Initialize the tag-box and reset age[] = 0; |
| 23 | end if |
| 24 | associate the assigned detection boxes () to the unassigned tag-box |
| 25 | if the assigned detection box has more than one tag-boxes |
| 26 | pend the tag-box |
| 27 | end if |
| 28 | end for |
4. Experiments and Results
4.1. Materials and Evaluation Metrics
4.2. Implementation Details
4.3. Experimental Results
5. Discussion and Further Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Leruste, H.; Bokkers, E.A.; Sergent, O.; Wolthuis-Fillerup, M.; van Reenen, C.G.; Lensink, B.J. Effects of the observation method (direct v. From video) and of the presence of an observer on behavioural results in veal calves. Animal 2013, 7, 1858–1864. [Google Scholar] [CrossRef] [PubMed]
- Jack, K.M.; Lenz, B.B.; Healan, E.; Rudman, S.; Schoof, V.A.; Fedigan, L. The effects of observer presence on the behavior of cebus capucinus in costa rica. Am. J. Primatol. 2008, 70, 490–494. [Google Scholar] [CrossRef] [PubMed]
- Iredale, S.K.; Nevill, C.H.; Lutz, C.K. The influence of observer presence on baboon (papio spp.) and rhesus macaque (macaca mulatta) behavior. Appl. Anim. Behav. Sci. 2010, 122, 53–57. [Google Scholar] [CrossRef] [PubMed]
- Tuyttens, F.A.M.; de Graaf, S.; Heerkens, J.L.T.; Jacobs, L.; Nalon, E.; Ott, S.; Stadig, L.; Van Laer, E.; Ampe, B. Observer bias in animal behaviour research: Can we believe what we score, if we score what we believe? Anim. Behav. 2014, 90, 273–280. [Google Scholar] [CrossRef]
- Taylor, D.J. Pig Diseases, 9th ed.; 5M Publishing: Sheffield, UK, 2013. [Google Scholar]
- Martinez-Aviles, M.; Fernandez-Carrion, E.; Garcia-Baones, J.M.L.; Sanchez-Vizcaino, J.M. Early detection of infection in pigs through an online monitoring system. Transbound. Emerg. Dis. 2017, 64, 364–373. [Google Scholar] [CrossRef] [PubMed]
- Kulikov, V.A.; Khotskin, N.V.; Nikitin, S.V.; Lankin, V.S.; Kulikov, A.V.; Trapezov, O.V. Application of 3-d imaging sensor for tracking minipigs in the open field test. J. Neurosci. Meth. 2014, 235, 219–225. [Google Scholar] [CrossRef] [PubMed]
- Stavrakakis, S.; Li, W.; Guy, J.H.; Morgan, G.; Ushaw, G.; Johnson, G.R.; Edwards, S.A. Validity of the microsoft kinect sensor for assessment of normal walking patterns in pigs. Comput. Electron. Agr. 2015, 117, 1–7. [Google Scholar] [CrossRef]
- Kim, J.; Chung, Y.; Choi, Y.; Sa, J.; Kim, H.; Chung, Y.; Park, D.; Kim, H. Depth-based detection of standing-pigs in moving noise environments. Sensors 2017, 17, 2757. [Google Scholar] [CrossRef]
- Matthews, S.G.; Miller, A.L.; Plotz, T.; Kyriazakis, I. Automated tracking to measure behavioural changes in pigs for health and welfare monitoring. Sci. Rep. 2017, 7, 17582. [Google Scholar] [CrossRef]
- Chung, Y.; Kim, H.; Lee, H.; Park, D.; Jeon, T.; Chang, H.H. A cost-effective pigsty monitoring system based on a video sensor. KSII Trans. Internet Inf. 2014, 8, 1481–1498. [Google Scholar]
- Li, Y.Y.; Sun, L.Q.; Zou, Y.B.; Li, Y. Individual pig object detection algorithm based on gaussian mixture model. Int. J. Agr. Biol. Eng. 2017, 10, 186–193. [Google Scholar]
- Mcfarlane, N.J.B.; Schofield, C.P. Segmentation and tracking of piglets in images. Mach. Vision. Appl. 1995, 8, 187–193. [Google Scholar] [CrossRef]
- Kashiha, M.; Bahr, C.; Ott, S.; Moons, C.P.H.; Niewold, T.A.; Odberg, F.O.; Berckmans, D. Automatic identification of marked pigs in a pen using image pattern recognition. Comput. Electron. Agr. 2013, 93, 111–120. [Google Scholar] [CrossRef]
- Nasirahmadi, A.; Richter, U.; Hensel, O.; Edwards, S.; Sturm, B. Using machine vision for investigation of changes in pig group lying patterns. Comput. Electron. Agr. 2015, 119, 184–190. [Google Scholar] [CrossRef]
- Tu, G.J.; Karstoft, H.; Pedersen, L.J.; Jorgensen, E. Foreground detection using loopy belief propagation. Biosyst. Eng. 2013, 116, 88–96. [Google Scholar] [CrossRef]
- Ahrendt, P.; Gregersen, T.; Karstoft, H. Development of a real-time computer vision system for tracking loose-housed pigs. Comput. Electron. Agr. 2011, 76, 169–174. [Google Scholar] [CrossRef]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEE Trans. Pattern Anal. 2015, 37, 583–596. [Google Scholar] [CrossRef]
- Nilsson, M.; Herlin, A.H.; Ardo, H.; Guzhva, O.; Astrom, K.; Bergsten, C. Development of automatic surveillance of animal behaviour and welfare using image analysis and machine learned segmentation technique. Animal 2015, 9, 1859–1865. [Google Scholar] [CrossRef]
- Stauffer, C.; Grimson, W.E.L. Learning patterns of activity using real-time tracking. IEEE Trans. Pattern Anal. 2000, 22, 747–757. [Google Scholar] [CrossRef]
- Sandau, M.; Koblauch, H.; Moeslund, T.B.; Aanaes, H.; Alkjaer, T.; Simonsen, E.B. Markerless motion capture can provide reliable 3d gait kinematics in the sagittal and frontal plane. Med. Eng. Phys. 2014, 36, 1168–1175. [Google Scholar] [CrossRef]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, San Diego, CA, USA, 20–25 June 2015; pp. 1440–1448. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. arXiv, 2016; arXiv:1605.06409. [Google Scholar]
- Ren, S.Q.; He, K.M.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. Lect. Notes Comput. Sci. 2016, 9905, 21–37. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE International Conference on Computer Vision, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Uijlings, J.R.R.; van de Sande, K.E.A.; Gevers, T.; Smeulders, A.W.M. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. Eco: Efficient convolution operators for tracking. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 22–25 July 2017; pp. 6931–6939. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Learning spatially regularized correlation filters for visual tracking. In Proceedings of the IEEE International Conference Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 4310–4318. [Google Scholar]
- Danelljan, M.; Robinson, A.; Khan, F.S.; Felsberg, M. Beyond correlation filters: Learning continuous convolution operators for visual tracking. Comput. Vis. ECCV 2016, 9909 Pt V, 472–488. [Google Scholar]
- Declercq, A.; Piater, J.H. Online learning of gaussian mixture models–A two-level approach. In Proceedings of the Third International Conference on Computer Vision Theory and Applications, Funchal, Portugal, 22–25 January 2008; Volume 1, pp. 605–611. [Google Scholar]
- Munkres, J. Algorithms for the assignment and transportation problems. J. Soc. Ind. Appl. Math. 1957, 5, 32–38. [Google Scholar] [CrossRef]
- Bernardin, K.; Stiefelhagen, R. Evaluating multiple object tracking performance: The clear mot metrics. EURASIP J. Image Video 2008, 2008, 246309. [Google Scholar] [CrossRef]
- Li, Y.A.; Huang, C.; Nevatia, R. Learning to associate: Hybridboosted multi-target tracker for crowded scene. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; Volume 1–4, pp. 2945–2952. [Google Scholar]
- Vedaldi, A.; Lenc, K. Matconvnet convolutional neural networks for matlab. In Proceedings of the 2015 ACM Multimedia Conference, Brisbane, Australia, 26–30 October 2015; pp. 689–692. [Google Scholar]
- Felzenszwalb, P.F.; Girshick, R.B.; McAllester, D.; Ramanan, D. Object detection with discriminatively trained part-based models. IEEE Trans. Pattern Anal. 2010, 32, 1627–1645. [Google Scholar] [CrossRef]
- Van de Weijer, J.; Schmid, C.; Verbeek, J.; Larlus, D. Learning color names for real-world applications. IEEE Trans. Image Process. 2009, 18, 1512–1523. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Model | Number of Frames | The Conditions of the Sequence |
|---|---|---|---|
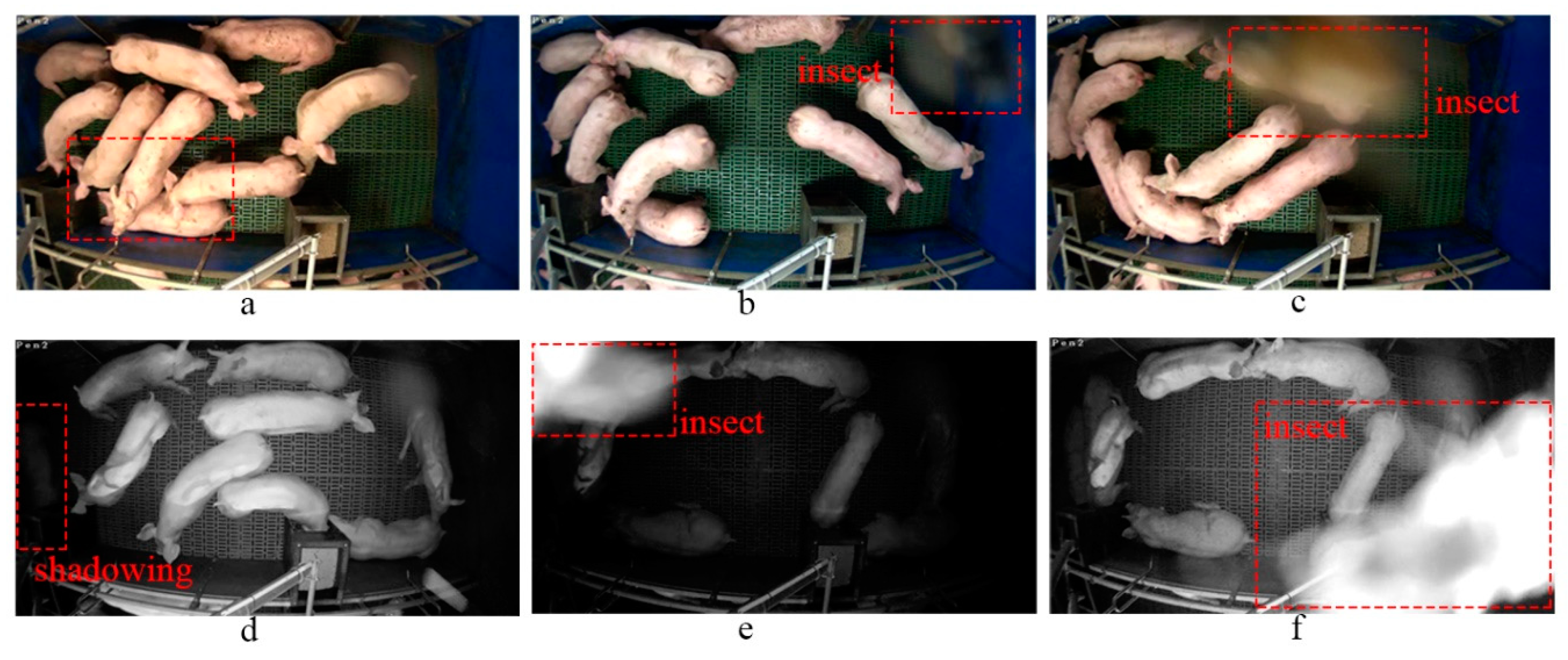
| S1 | Day | 800 | Deformations, light fluctuation, occlusions caused by pigs and a long stay insect on the camera |
| S2 | Day | 700 | Deformations, severe occlusions happened among pigs that resulted in the object instances becoming invisible during the occlusions |
| S3 | Day | 1500 | Deformations, light fluctuation, occlusions caused by an insect, occlusions among the pigs |
| S4 | Night | 600 | Deformations, occlusions caused by an insect, occlusions among the pigs |
| S5 | Night | 600 | Deformations, occlusions among the pigs |
| Metric | Description |
|---|---|
| Recall ↑ | Percentage of correctly matched detections to ground-truth detections |
| Precision ↑ | Percentage of correctly matched detections to total detections |
| FAF ↓ | Number of false alarms per frame |
| MT ↑, PT, ML ↓ | Number of mostly tracked, partially tracked and mostly lost trajectories |
| IDs ↓ | Number of identity switches |
| FRA ↓ | Number of fragmentations of trajectories |
| MOTA ↑ | The overall multiple objects tracking accuracy |
| Sequences ID | Recall (%) ↑ | Precision (%) ↑ | FAF ↓ | MT ↑ | PT | ML ↓ | IDs ↓ | FRA ↓ | MOTA (%) ↑ |
|---|---|---|---|---|---|---|---|---|---|
| S1 | 91.51 | 91.95 | 0.72 | 8 | 1 | 0 | 28 | 106 | 83.9 |
| S2 | 94.12 | 93.98 | 0.54 | 9 | 0 | 0 | 30 | 123 | 88.1 |
| S3 | 97.64 | 97.57 | 0.22 | 9 | 0 | 0 | 10 | 52 | 95.2 |
| S4 | 92.90 | 92.79 | 0.65 | 9 | 0 | 0 | 14 | 26 | 85.7 |
| S5 | 97.52 | 97.30 | 0.21 | 9 | 0 | 0 | 8 | 24 | 95.0 |
| Average | 94.74 | 94.72 | 0.47 | 8.8 | 0.2 | 0 | 18 | 66.2 | 89.58 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Gray, H.; Ye, X.; Collins, L.; Allinson, N. Automatic Individual Pig Detection and Tracking in Pig Farms. Sensors 2019, 19, 1188. https://doi.org/10.3390/s19051188
Zhang L, Gray H, Ye X, Collins L, Allinson N. Automatic Individual Pig Detection and Tracking in Pig Farms. Sensors. 2019; 19(5):1188. https://doi.org/10.3390/s19051188
Chicago/Turabian StyleZhang, Lei, Helen Gray, Xujiong Ye, Lisa Collins, and Nigel Allinson. 2019. "Automatic Individual Pig Detection and Tracking in Pig Farms" Sensors 19, no. 5: 1188. https://doi.org/10.3390/s19051188
APA StyleZhang, L., Gray, H., Ye, X., Collins, L., & Allinson, N. (2019). Automatic Individual Pig Detection and Tracking in Pig Farms. Sensors, 19(5), 1188. https://doi.org/10.3390/s19051188