Task Scheduling Based on a Hybrid Heuristic Algorithm for Smart Production Line with Fog Computing

Abstract
1. Introduction
- (1)
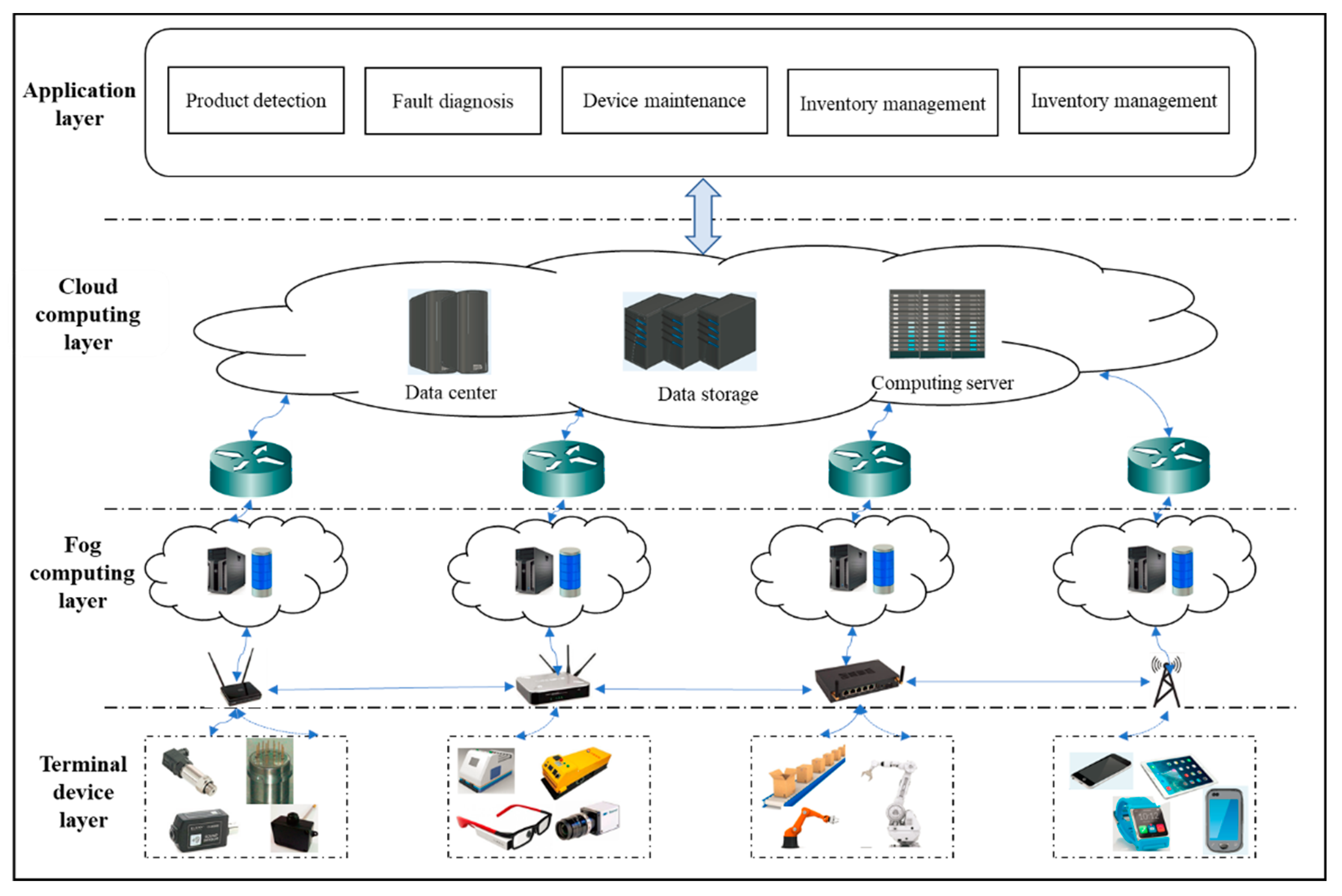
- We design a distributed fog computing system architecture for smart production line. The fog computing system model and task scheduling-related mathematical model are established. The task scheduling objective function is given, whose goal is to minimize the delay and energy consumption.
- (2)
- A hybrid heuristic algorithm is proposed, which combines the improved particle swarm optimization (IPSO) algorithm and the improved ant colony optimization (IACO) algorithm to provide a hybrid heuristic algorithm for the task scheduling problem.
- (3)
- We establish a fog computing based smart production line simulation environment, and the task scheduling strategy proposed is compared with other strategies, then using three performance metrics for experimental verification, achieving results that prove the effectiveness of the strategy.
2. Related Work
3. System Model and Problem Formulation
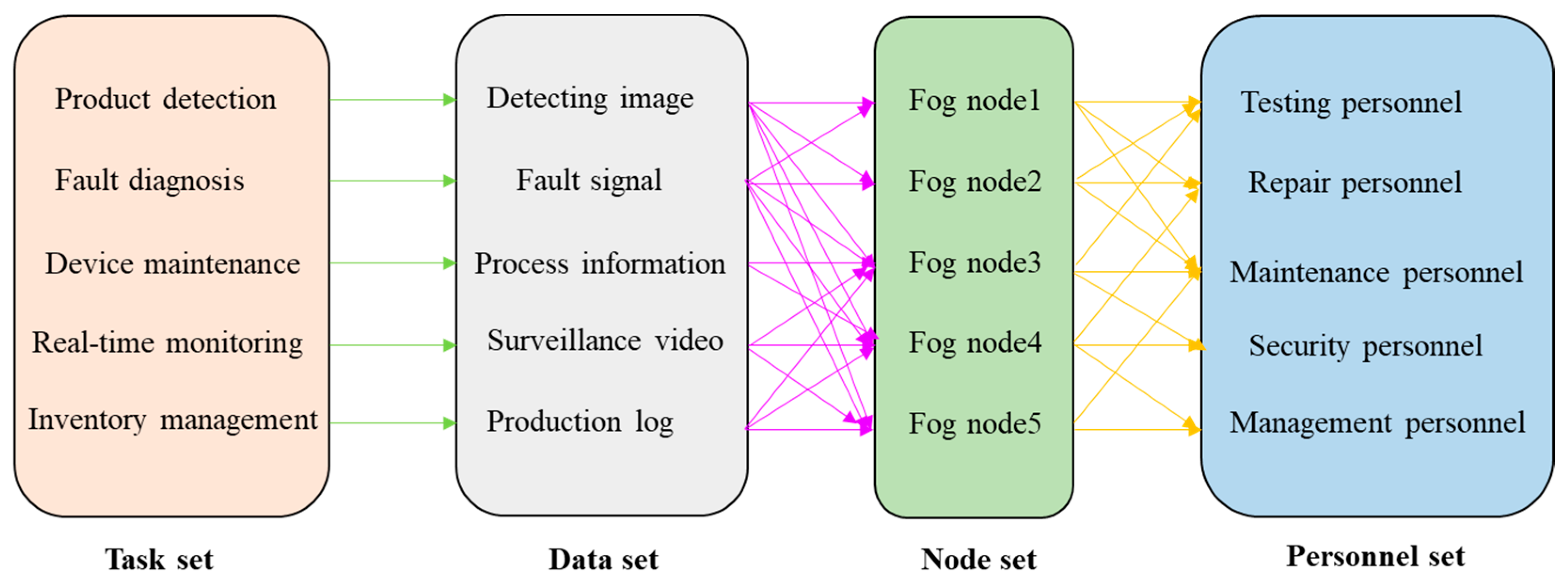
3.1. System Architecture and System Model
3.2. Delay Model and Energy Consumption Model
3.3. Problem Formulation
- s.t. (C1): sij(t) ∈ {0,1}, i = 1, 2, …, n; j = 1, 2, …, m,
- (C2): si1(t) + si2(t) + … + sim(t) = 1, i = 1, 2, …, n,
- (C3): sij(t)*Tij(t) ≤ Ti,max, i = 1, 2, …, n; j = 1, 2, …, m,
- (C4): sij(t)*Eij (t)≤ Eil, i = 1, 2, …, n; j = 1, 2, …, m,
- (C5): , ai = 1, i = 1, 2, …, n,
- (C6): , ai = 0, i = 1, 2, …, n,
4. Task Scheduling Algorithm Design
4.1. Improved Particle Swarm Optimization Algorithm
4.1.1. Discrete Particle Swarm Initialization
4.1.2. Updating Position and Speed of the Particle
4.1.3. Fitness Function
4.1.4. Inertia Weight ω and Contraction Factor η
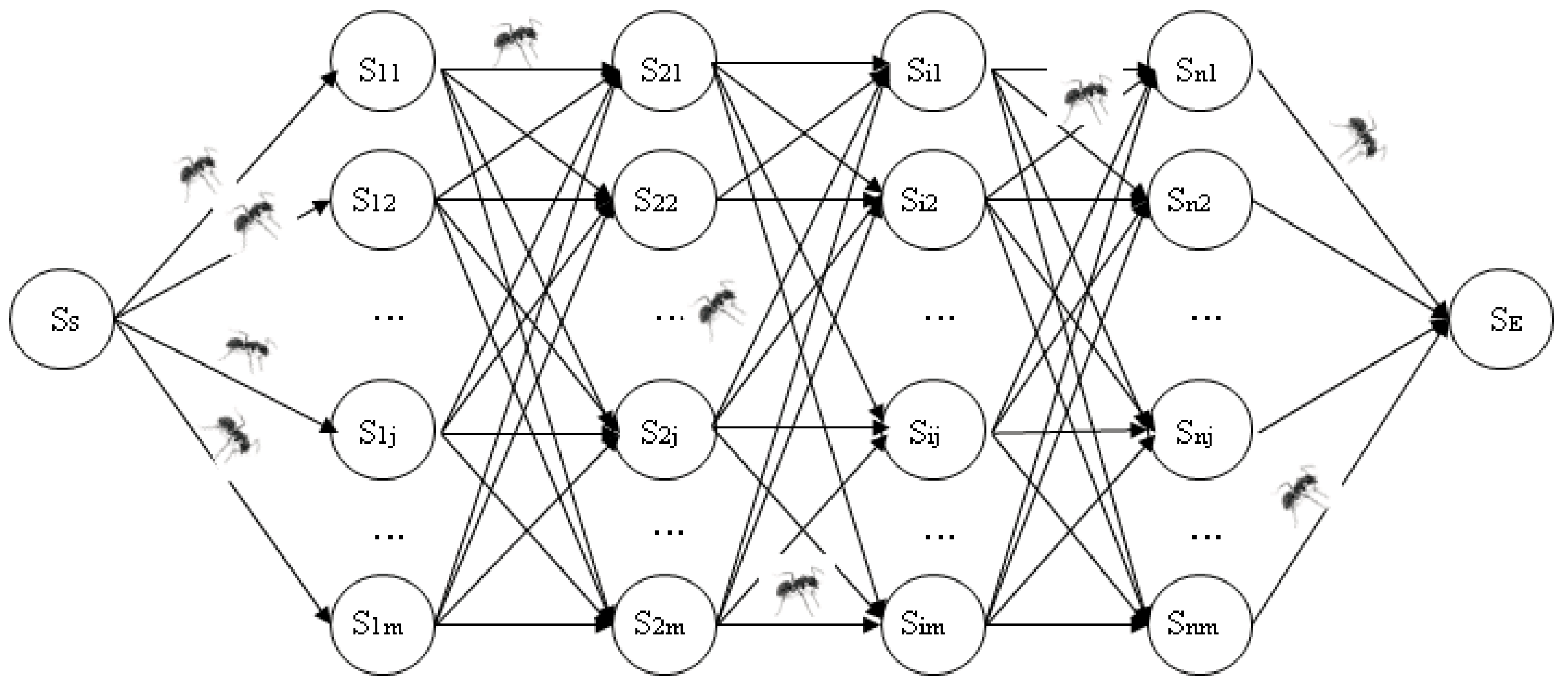
4.2. Improved Ant Colony Optimization Algorithm
4.2.1. Improved Heuristic Information
4.2.2. Improved Path Transition Probability
4.2.3. Update of the Pheromone
4.3. Hybrid Heuristic Algorithm
- Step 1:
- Define the task scheduling objective function in fog computing.
- Step 2:
- Set related parameters of the hybrid heuristic algorithm and the algorithm termination conditions.
- Step 3:
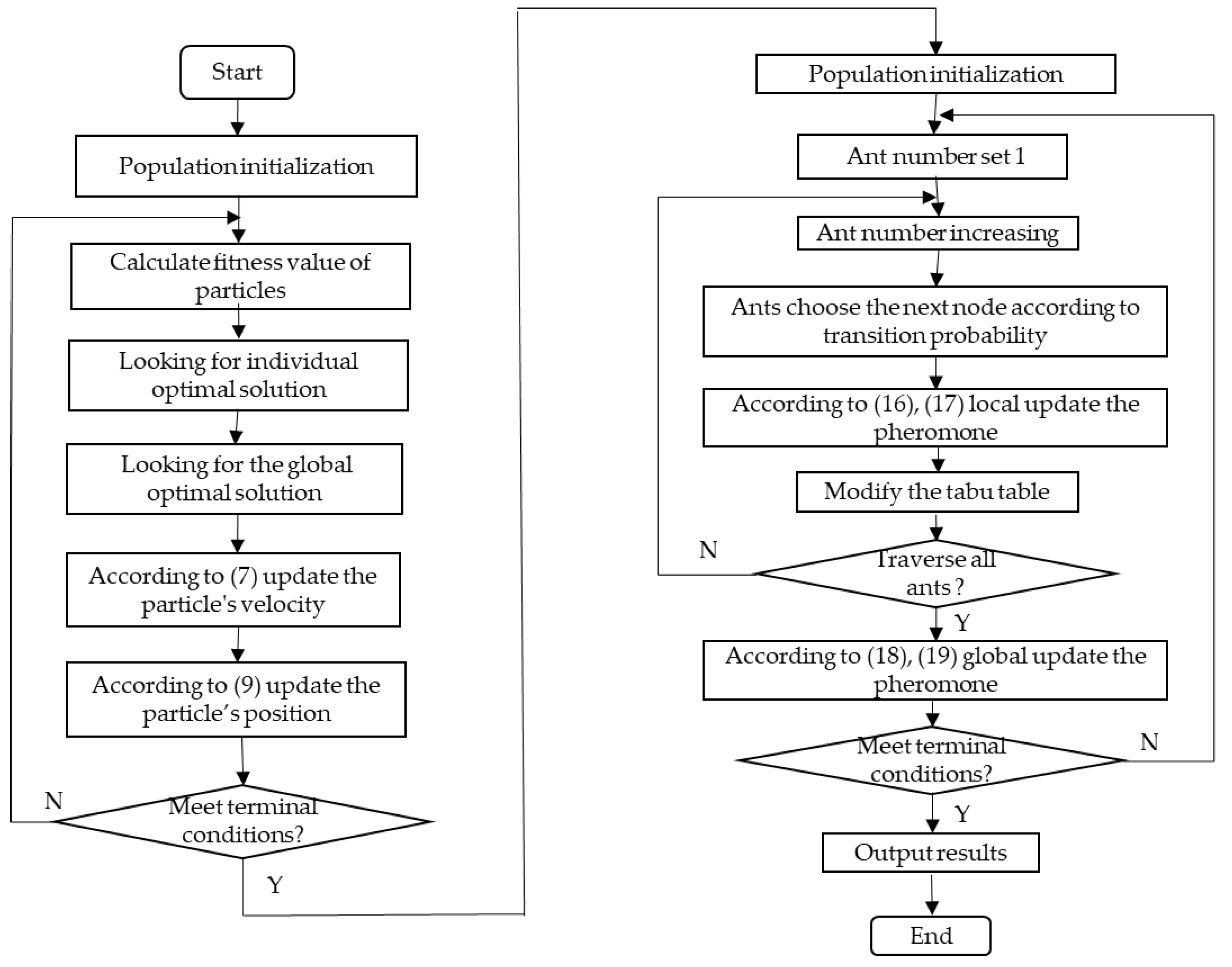
- Initialize the position and speed of the improved discrete particle swarm.
- Step 4:
- Calculate each particle’s fitness, and determine the particle’s individual optimal position and the global optimal position.
- Step 5:
- According to Equations (7) and (9), the velocity and position of the discrete particle are updated.
- Step 6:
- Judging whether the algorithm’s termination conditions are satisfied, output the task initial scheduling results of the fog computing mode, and turn to Step 7; otherwise, go to Step 4.
- Step 7:
- Referencing to the scheduling results of the improved particle swarm optimization algorithm to initialize the pheromone of the improved ant colony optimization algorithm.
- Step 8:
- Some ants are placed on the start node for travelling.
- Step 9:
- Each ant according to Equation (14) chooses the next node; according to Equations (16) and (17), update the local pheromone, and add the selected node to the task scheduling list.
- Step 10:
- After scheduling all the tasks, calculate the fitness value of the scheduling results according to the task scheduling list, and then according to Equations (18) and (19), update the global pheromone. Otherwise, go to Step 9.
- Step 11:
- Judging whether the algorithm’s termination conditions are met, output the task optimal scheduling results of the fog computing mode. Otherwise, go to Step 8.
5. Implementation and Simulation Results
5.1. Simulation Setup
5.2. Performance Metrics and Reference Methods
5.3. Evaluation Results
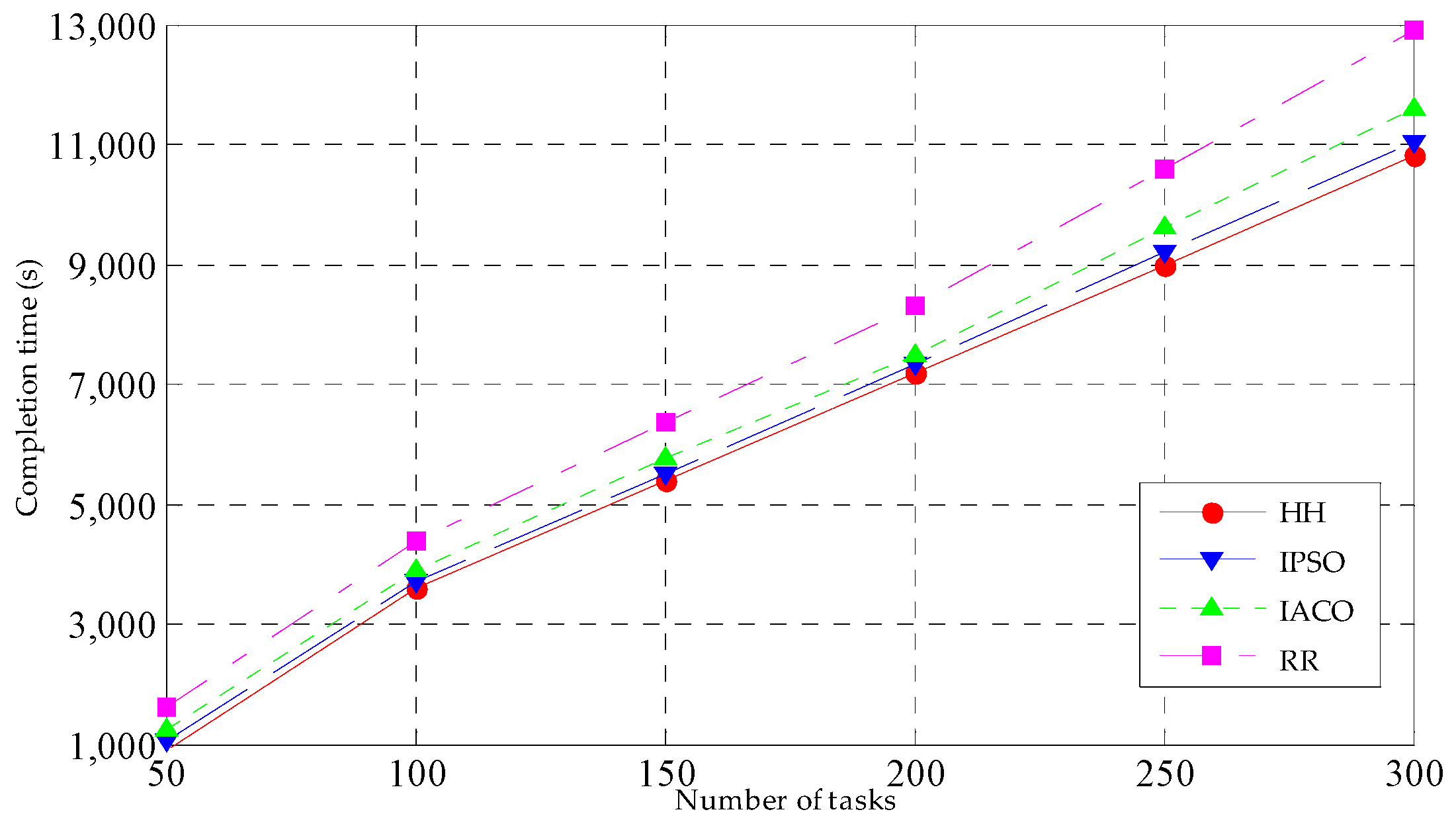
5.3.1. Completion Time
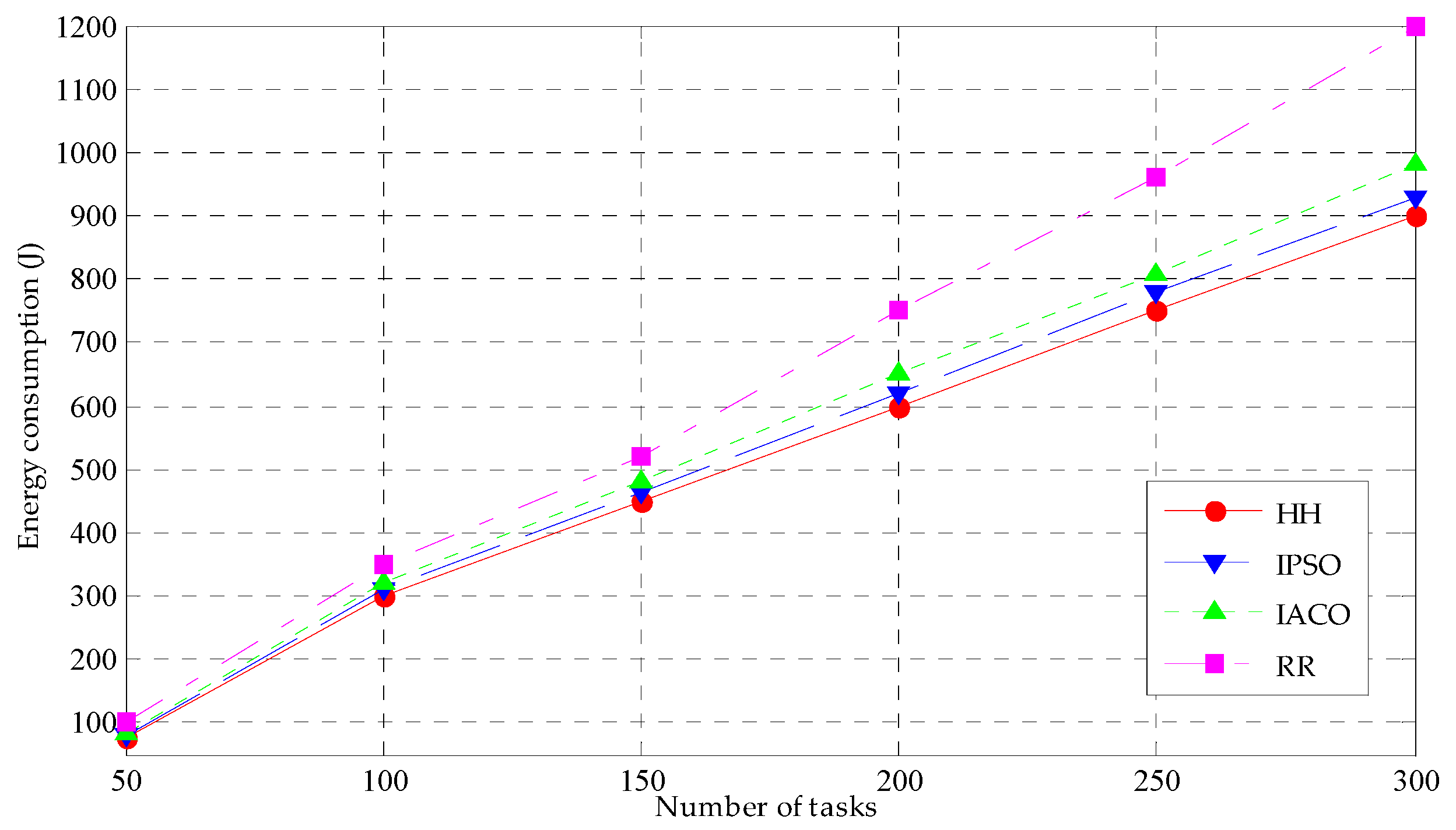
5.3.2. Energy Consumption
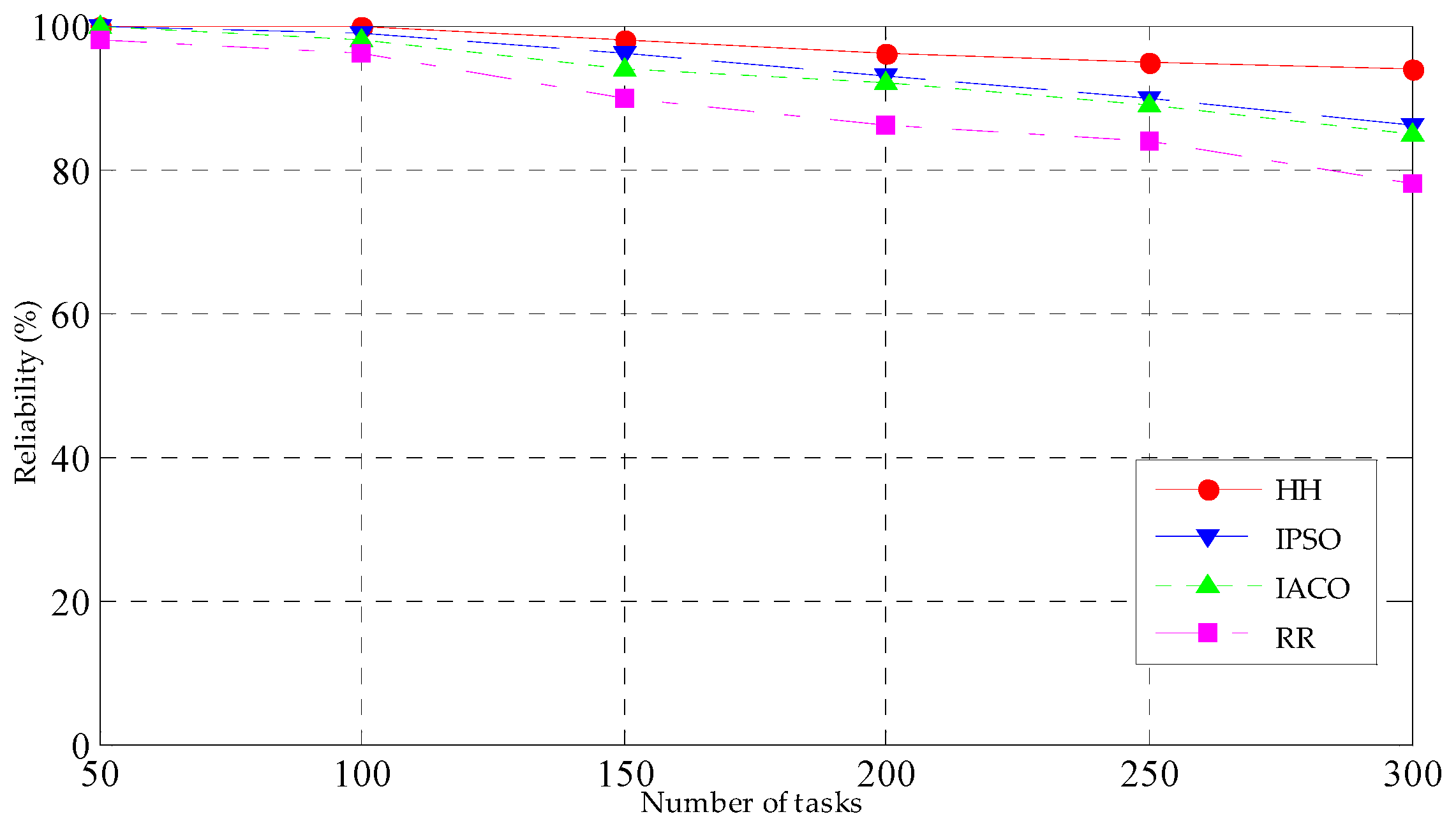
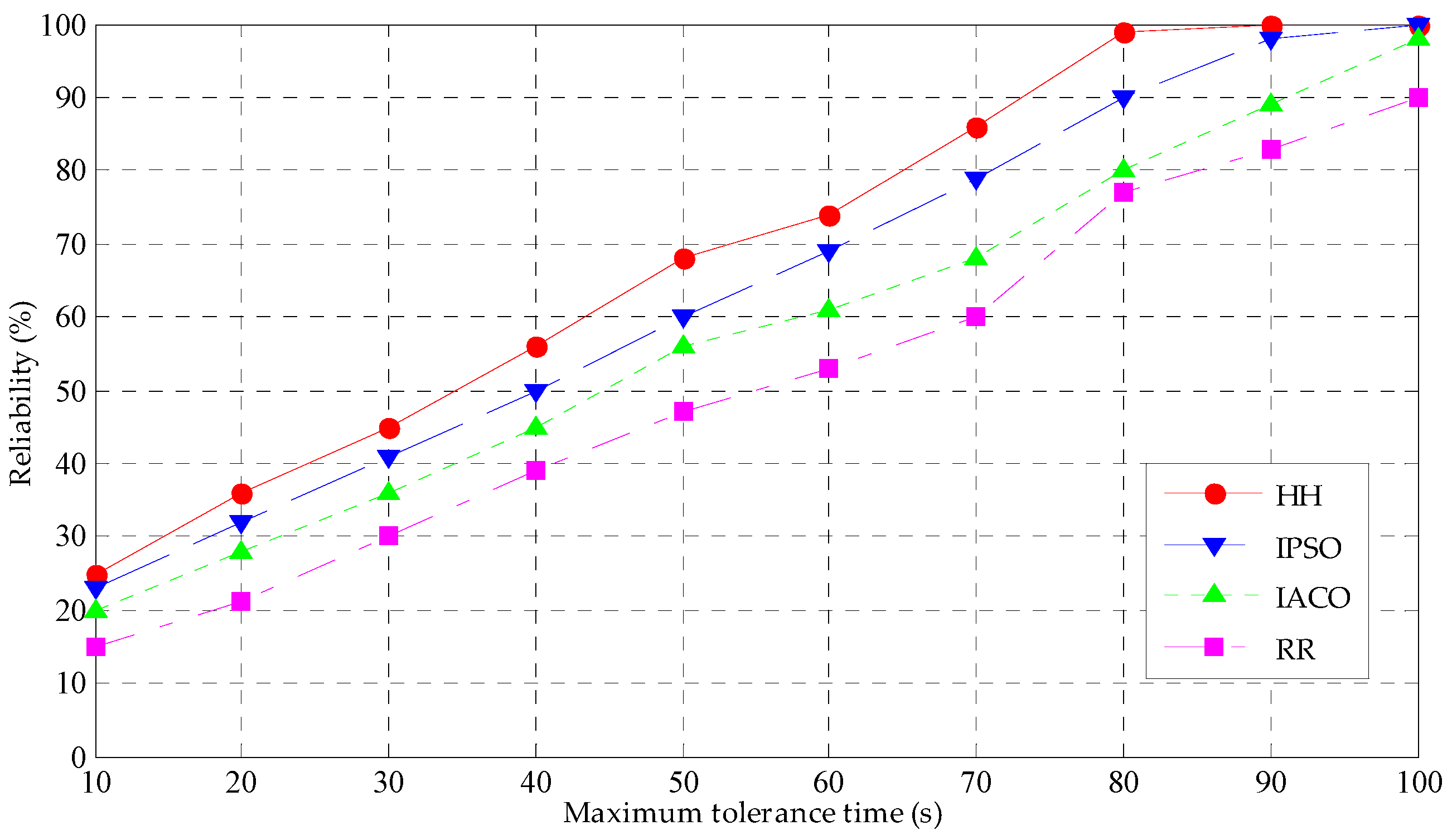
5.3.3. Reliability
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xu, L.; He, W.; Li, S. Internet of things in industries: A survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Wan, J.; Tang, S.; Li, D.; Wang, S.; Liu, C.; Abbas, H.; Vasilakos, A. A manufacturing big data solution for active preventive maintenance. IEEE Trans. Ind. Inform. 2017, 13, 2039–2047. [Google Scholar] [CrossRef]
- Geng, H. Internet of things and cloud computing. In Internet of Things and Data Analytics Handbook; Wiley: San Diego, CA, USA, 2017; p. 1. [Google Scholar]
- Bi, Z.; Xu, L.; Wang, C. Internet of things for enterprise systems of modern manufacturing. IEEE Trans. Ind. Inform. 2014, 10, 1537–1546. [Google Scholar]
- Aazam, M.; Zeadally, S.; Harras, K. Deploying Fog Computing in Industrial Internet of Things and Industry 4.0. IEEE Trans. Ind. Inform. 2018, 14, 4674–4682. [Google Scholar] [CrossRef]
- Yin, L.; Luo, J.; Luo, H. Tasks Scheduling and Resource Allocation in Fog Computing Based on Containers for Smart Manufacturing. IEEE Trans. Ind. Inform. 2018, 14, 4712–4721. [Google Scholar] [CrossRef]
- Li, L.; Ota, K.; Dong, M. Deep Learning for Smart Industry: Efficient Manufacture Inspection System with Fog Computing. IEEE Trans. Ind. Inform. 2018, 14, 4665–4673. [Google Scholar] [CrossRef]
- Mocanu, S.; Geampalia, G.; Chenaru, O.; Dobrescu, R. Fog-Based Solution for Real-Time Monitoring and Data Processing in Manufacturing. In Proceedings of the 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 10–12 October 2018. [Google Scholar]
- Ashjaei, M.; Bengtsson, M. Enhancing smart maintenance management using fog computing technology. In Proceedings of the 2017 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Singapore, 10–13 December 2017. [Google Scholar]
- Wang, J.; Li, D. Computing modes-based task processing for Industrial Internet of Things. Int. J. Auton. Adapt. Commun. Syst. 2018, in press. [Google Scholar]
- Mouradian, C.; Naboulsi, D.; Yangui, S.; Glitho, R.; Morrow, M.; Polakos, P. A comprehensive survey on fog computing: State of-the-art and research challenges. IEEE Commun. Surv. Tutor. 2017, 20, 416–464. [Google Scholar] [CrossRef]
- Bouzarkouna, I.; Sahnoun, M.; Sghaier, N.; Baudry, D.; Gout, C. Challenges Facing the Industrial Implementation of Fog Computing. In Proceedings of the 2018 IEEE 6th International Conference on Future Internet of Things and Cloud (FiCloud), Barcelona, Spain, 6–8 August 2018; pp. 341–348. [Google Scholar]
- Vaquero, L.; Rodero-Merino, L. Finding your way in the fog: Towards a comprehensive definition of fog computing. ACM SIGCOMM Comput. Commun. Rev. 2014, 44, 27–32. [Google Scholar] [CrossRef]
- Baccarelli, E.; Naranjo, P.G.V.; Scarpiniti, M.; Abawajy, J H. Fog of everything: Energy-efficient networked computing architectures, research challenges, and a case study. IEEE Access 2017, 5, 9882–9910. [Google Scholar] [CrossRef]
- Dubey, H.; Monteiro, A.; Constant, N.; Abtahi, M.; Borthakur, D.; Mahler, L.; Sun, Y.; Yang, Q.; Akbar, U.; Mankodiya, K. Fog computing in medical internet-of-things: Architecture, implementation, and applications. In Handbook of Large-Scale Distributed Computing in Smart Healthcare; Springer: Richardson, TX, USA, 2017; pp. 281–321. [Google Scholar]
- Wu, D.; Liu, S.; Zhang, L.; Terpenny, J.; Gao, R.; Kurfess, T.; Guzzo, J. A fog computing-based framework for process monitoring and prognosis in cyber-manufacturing. J. Manuf. Syst. 2017, 43, 25–34. [Google Scholar] [CrossRef]
- Naha, R.K.; Garg, S.; Georgakopoulos, D.; Jayaraman, P.P.; Gao, L.; Xiang, Y.; Ranjan, R. Fog Computing: Survey of trends, architectures, requirements, and research directions. IEEE Access 2018, 6, 47980–48009. [Google Scholar] [CrossRef]
- Markakis, E.K.; Karras, K.; Zotos, N.; Sideris, A.; Moysiadis, T.; Corsaro, A.; Alexiou, G.; Skianis, C.; Mastorakis, G.; Mavromoustakis, C.X.; et al. EXEGESIS: Extreme edge resource harvesting for a virtualized fog environment. IEEE Commun. Mag. 2017, 7, 7–173. [Google Scholar] [CrossRef]
- Markakis, E.K.; Karras, K.; Sideris, A.; Alexiou, G.; Pallis, E. Computing, Caching, and Communication at the Edge: The Cornerstone for Building a Versatile 5G Ecosystem. IEEE Commun. Mag. 2017, 55, 152–157. [Google Scholar] [CrossRef]
- Mutlag, A.A.; Ghani, M.K.A.; Arunkumar, N.; Mohamed, M.A.; Mohd, O. Enabling technologies for fog computing in healthcare IoT systems. Future Gener. Comput. Syst. 2019, 90, 62–78. [Google Scholar] [CrossRef]
- Meng, X.; Wang, W.; Zhang, Z. Delay-constrained hybrid computation offloading with cloud and fog computing. IEEE Access 2017, 5, 21355–21367. [Google Scholar] [CrossRef]
- Mao, Y.; Zhang, J.; Letaief, K. Dynamic computation offloading for mobile-edge computing with energy harvesting devices. IEEE J. Sel. Areas Commun. 2016, 34, 3590–3605. [Google Scholar] [CrossRef]
- Zhang, G.; Shen, F.; Yang, Y.; Qian, H.; Yao, W. Fair Task Offloading among Fog Nodes in Fog Computing Networks. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Wan, J.; Chen, B.; Wang, S.; Xia, M.; Li, D.; Liu, C. Fog Computing for Energy-aware Load Balancing and Scheduling in Smart Factory. IEEE Trans. Ind. Inform. 2018, 14, 4548–4556. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, S.; Zhang, W.; Chen, Y.; Luo, X.; Wang, J. DEBTS: Delay Energy Balanced Task Scheduling in Homogeneous Fog Networks. IEEE Internet Things J. 2018, 5, 2094–2106. [Google Scholar] [CrossRef]
- Pham, X.; Huh, E. Towards task scheduling in a cloud-fog computing system. In Proceedings of the 2016 18th Asia-Pacific Network Operations and Management Symposium (APNOMS), Kanazawa, Japan, 5–7 October 2016; pp. 1–4. [Google Scholar]
- Chekired, D.; Khoukhi, L.; Mouftah, H. Industrial IoT Data Scheduling Based on Hierarchical Fog Computing: A Key for Enabling Smart Factory. IEEE Trans. Ind. Inform. 2018, 14, 4590–4602. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, J.; Li, Y.; Bai, L.; Ji, Y. Joint jobs scheduling and lightpath provisioning in fog computing micro datacenter networks. IEEE/OSA J. Opt. Commun. Netw. 2018, 10, 152–163. [Google Scholar] [CrossRef]
- Bittencourt, L.; Diaz-Montes, J.; Buyya, R.; Rana, O.; Parashar, M. Mobility-Aware Application Scheduling in Fog Computing. IEEE Cloud Comput. 2017, 4, 26–35. [Google Scholar] [CrossRef]
- Zeng, D.; Gu, L.; Guo, S.; Cheng, Z.; Yu, S. Joint optimization of task scheduling and image placement in fog computing supported software-defined embedded system. IEEE Trans. Comput. 2016, 65, 3702–3712. [Google Scholar] [CrossRef]
- Deng, Y.; Chen, Z.; Zhang, D.; Zhao, M. Workload scheduling toward worst-case delay and optimal utility for single-hop Fog-IoT architecture. IET Commun. 2018, 12, 2164–2173. [Google Scholar] [CrossRef]
- Chen, X.; Wang, L. Exploring Fog Computing-Based Adaptive Vehicular Data Scheduling Policies Through a Compositional Formal Method-PEPA. IEEE Commun. Lett. 2017, 21, 745–748. [Google Scholar] [CrossRef]
- Zhao, S.; Yang, Y.; Shao, Z.; Yang, X.; Qian, H.; Wang, C. FEMOS: Fog-Enabled Multitier Operations Scheduling in Dynamic Wireless Networks. IEEE Internet Things J. 2018, 5, 1169–1183. [Google Scholar] [CrossRef]
- Wang, J.; Li, D. Adaptive Computing Optimization in Software-Defined Network-Based Industrial Internet of Things with Fog Computing. Sensors 2018, 18, 2509. [Google Scholar] [CrossRef] [PubMed]
- Ni, L.; Zhang, J.; Jiang, C.; Yan, C.; Yu, K. Resource Allocation Strategy in Fog Computing Based on Priced Timed Petri Nets. IEEE Internet Things J. 2017, 4, 1216–1228. [Google Scholar] [CrossRef]
- Ben Alla, H.; Ben Alla, S.; Ezzati, A. A novel architecture for task scheduling based on Dynamic Queues and Particle Swarm Optimization in cloud computing. In Proceedings of the 2016 2nd International Conference on Cloud Computing Technologies and Applications (CloudTech), Marrakech, Morocco, 24–26 May 2016; pp. 108–114. [Google Scholar]
- Agarwal, M.; Srivastava, G.M.S. A genetic algorithm inspired task scheduling in cloud computing. In Proceedings of the 2016 International Conference on Computing, Communication and Automation (ICCCA), Noida, India, 29–30 April 2016; pp. 364–367. [Google Scholar]
- Dadmehr, R.; Sabihe, K.; Mohsen, N. A security aware scheduling in fog computing by hyper heuristic algorithm. In Proceedings of the 2017 3rd Iranian Conference on Signal Processing and Intelligent Systems (ICSPIS), Shahrood, Iran, 20–21 December 2017; pp. 87–92. [Google Scholar]
- Dai, Y.; Lou, Y.; Lu, X. A Task Scheduling Algorithm Based on Genetic Algorithm and Ant Colony Optimization Algorithm with Multi-QoS Constraints in Cloud Computing. In Proceedings of the 2015 7th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 December 2015; pp. 428–431. [Google Scholar]
- Domanal, S.; Guddeti, R.; Buyya, R. A Hybrid Bio-Inspired Algorithm for Scheduling and Resource Management in Cloud Environment. IEEE Trans. Serv. Comput. 2017. [CrossRef]
- Santhosh, B.; Manjaiah, D. A hybrid AvgTask-Min and Max-Min algorithm for scheduling tasks in cloud computing. In Proceedings of the 2015 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kumaracoil, India, 18–19 December 2015; pp. 325–328. [Google Scholar]
- Rajput, S.; Kushwah, V. A Genetic Based Improved Load Balanced Min-Min Task Scheduling Algorithm for Load Balancing in Cloud Computing. In Proceedings of the 2016 8th International Conference on Computational Intelligence and Communication Networks (CICN), Tehri, India, 23–25 December 2016; pp. 677–681. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Valve | Description |
|---|---|---|
| n | 100 | number of terminal devices |
| m | 10 | number of fog nodes |
| Di | 10–50 Mb | data size of Ii |
| Cj | 1–2G cycles/s | computing capacity of Fj |
| θc | 300 cycles/bit | computing intensity |
| Pir | 0.1 W | transmission power of gi |
| Pie | 0.05 W | idle power of gi |
| B | 100 MHz | link bandwidth |
| μT | 0.7 | real-time satisfaction weight |
| μE | 0.3 | energy consumption satisfaction weight |
| ω | [0.4, 0.9] | inertia weight factor |
| η | 0.9 | constriction factor |
| Kmax | 200 | maximum iterations |
| c1, c2 | 2 | accelerate factor |
| r1, r2, r3 | 0–1 | random variable |
| α | 1 | pheromone weight coefficient |
| β | 1 | weight coefficient of heuristic information |
| ρ | 0.5 | pheromone volatilization coefficient |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Li, D. Task Scheduling Based on a Hybrid Heuristic Algorithm for Smart Production Line with Fog Computing. Sensors 2019, 19, 1023. https://doi.org/10.3390/s19051023
Wang J, Li D. Task Scheduling Based on a Hybrid Heuristic Algorithm for Smart Production Line with Fog Computing. Sensors. 2019; 19(5):1023. https://doi.org/10.3390/s19051023
Chicago/Turabian StyleWang, Juan, and Di Li. 2019. "Task Scheduling Based on a Hybrid Heuristic Algorithm for Smart Production Line with Fog Computing" Sensors 19, no. 5: 1023. https://doi.org/10.3390/s19051023
APA StyleWang, J., & Li, D. (2019). Task Scheduling Based on a Hybrid Heuristic Algorithm for Smart Production Line with Fog Computing. Sensors, 19(5), 1023. https://doi.org/10.3390/s19051023