Low-Energy Data Collection in Wireless Sensor Networks Based on Matrix Completion



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We propose a low-energy data-collection method for large-scale WSNs including a load-balancing random sampling method and a corresponding algorithm to recover the original data from the samples accurately and fast. The data-collection method can be combined with any topologies of WSNs easily without the limit to communication change in sparse sensing schemes.
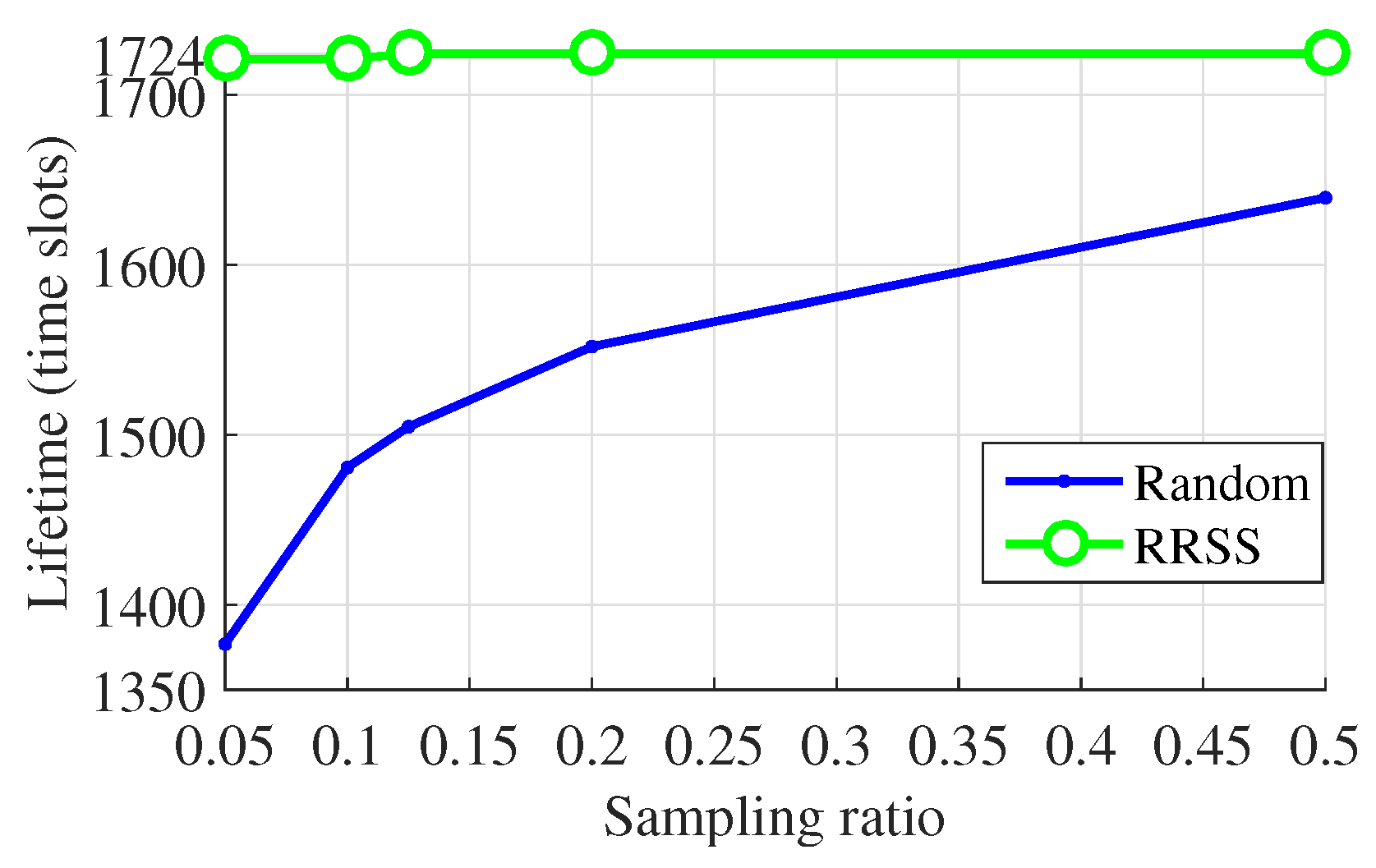
- We design a rotating varying sampling ratio based on sparse sampling and set a time schedule, on which sensor nodes are in the sleep mode most of the time to greatly reduce the energy consumption.
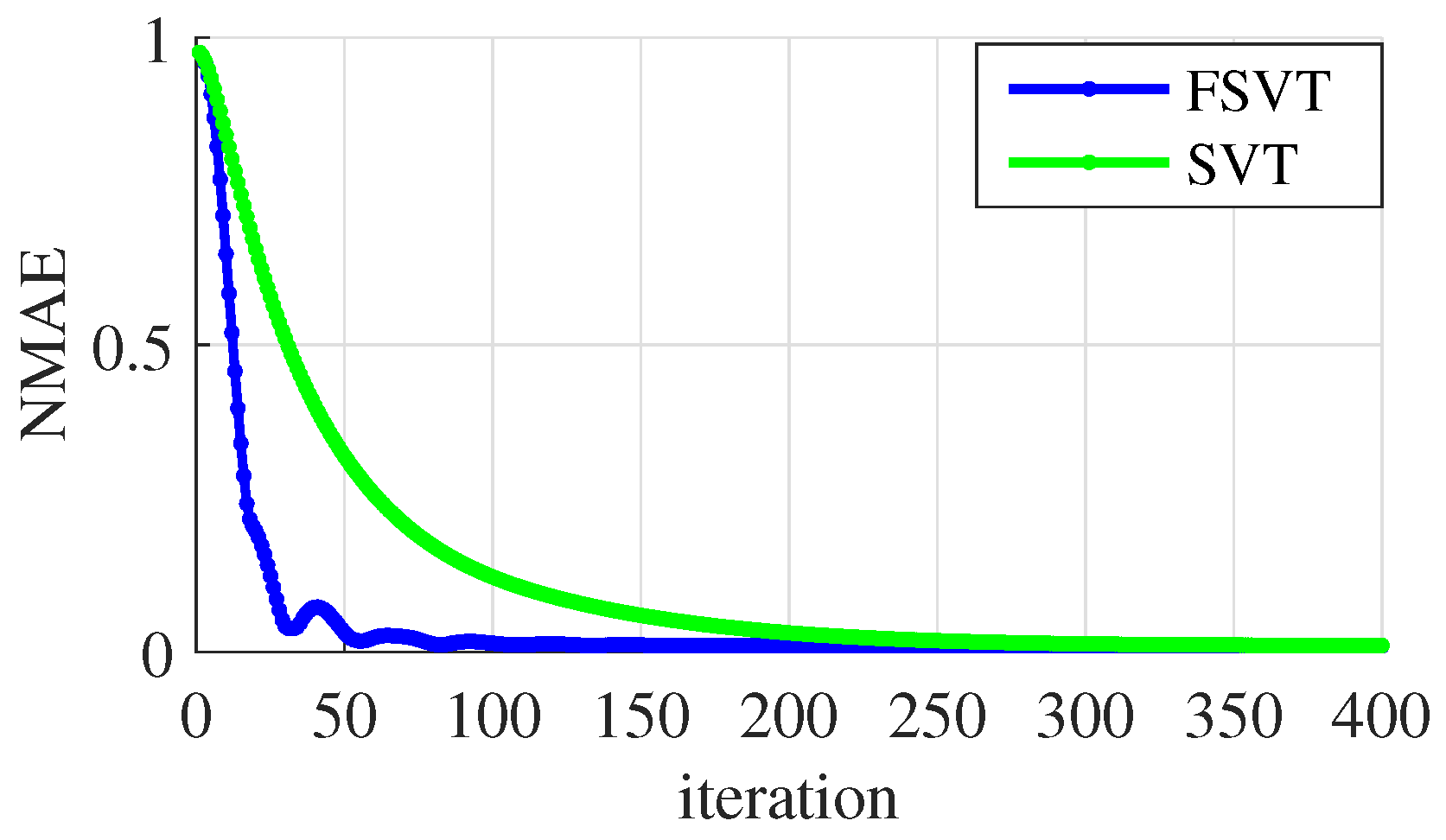
- We construct the model with Tikhonov regularization for recovering the original signal from the samples and use the SVT algorithm with the Nesterov technique to solve it. Theoretical explanations of the effectiveness of the algorithm have been given.
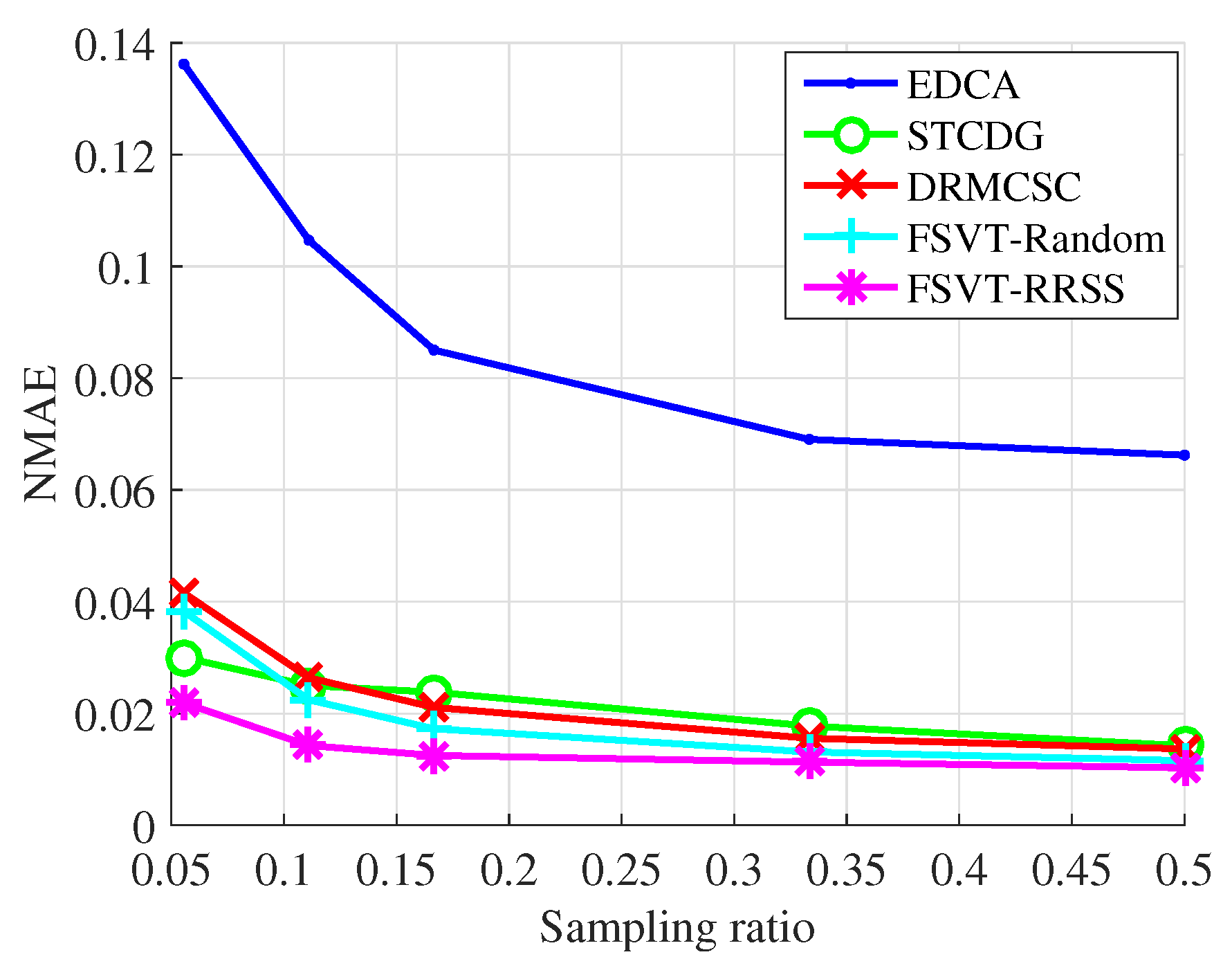
- With two real-world data sets, we evaluate the proposed sampling method with the corresponding FSVT algorithm compared the traditional sampling method and other data-collection methods. The simulation results show that the proposed sampling method can enhance the FSVT algorithm and the recovery performance outperforms other methods in terms of the reconstruction accuracy and rate.
2. Data Collection Based on MC
3. The Rotating Random Sparse Sampling Method
4. Problem Formulation and the Solution
5. Performance Evaluation
5.1. Experiment Environments and Parameters Setting
5.1.1. Real-world Data Sets
5.1.2. Parameters Setup
5.2. Results and Analysis of Experiments
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rawat, P.; Singh, K.D.; Chaouchi, H.; Bonnin, J.M. Wireless sensor networks: A survey on recent developments and potential synergies. J. Supercomput. 2014, 68, 1–48. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Luo, C.; Wu, F.; Sun, J.; Chen, C.W. Compressive data gathering for large-scale wireless sensor networks. In Proceedings of the 15th Annual International Conference on Mobile Computing and Networking, Beijing, China, 20–25 September 2009; pp. 145–156. [Google Scholar]
- He, J.; Sun, G.; Li, Z.; Zhang, Y. Compressive data gathering with low-rank constraints for wireless sensor networks. Signal Process. 2017, 131, 73–76. [Google Scholar] [CrossRef]
- Chen, J.; Jia, J.; Deng, Y.; Wang, X.; Aghvami, A.H. Adaptive Compressive Sensing and Data Recovery for Periodical Monitoring Wireless Sensor Networks. Sensors 2018, 18, 3369. [Google Scholar] [CrossRef] [PubMed]
- Candès, E.J.; Recht, B. Exact matrix completion via convex optimization. Found. Comput. Math. 2009, 9, 717. [Google Scholar] [CrossRef]
- Cheng, J.; Jiang, H.; Ma, X.; Liu, L.; Qian, L.; Tian, C.; Liu, W. Efficient data collection with sampling in WSNs: Making use of matrix completion techniques. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM 2010), Miami, FL, USA, 6–10 December 2010; pp. 1–5. [Google Scholar]
- Cheng, J.; Ye, Q.; Jiang, H.; Wang, D.; Wang, C. STCDG: An efficient data gathering algorithm based on matrix completion for wireless sensor networks. IEEE Trans. Wirel. Commun. 2013, 12, 850–861. [Google Scholar] [CrossRef]
- He, J.; Sun, G.; Zhang, Y.; Wang, Z. Data Recovery in Wireless Sensor Networks With Joint Matrix Completion and Sparsity Constraints. IEEE Commun. Lett. 2015, 19, 2230–2233. [Google Scholar] [CrossRef]
- Cai, J.F.; Candès, E.J.; Shen, Z. A singular value thresholding algorithm for matrix completion. SIAM J. Optim. 2010, 20, 1956–1982. [Google Scholar] [CrossRef]
- Xie, K.; Wang, L.; Wang, X.; Xie, G.; Wen, J. Low cost and high accuracy data gathering in WSNs with matrix completion. IEEE Trans. Mob. Comput. 2018, 17, 1595–1608. [Google Scholar] [CrossRef]
- Xie, K.; Ning, X.; Wang, X.; Xie, D.; Cao, J.; Xie, G.; Wen, J. Recover corrupted data in sensor networks: A matrix completion solution. IEEE Trans. Mob. Comput. 2017, 16, 1434–1448. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Kasimoglu, I.H. Wireless sensor and actor networks: Research challenges. Ad Hoc Netw. 2004, 2, 351–367. [Google Scholar] [CrossRef]
- Primeau, N.; Falcon, R.; Abielmona, R.; Petriu, E.M. A Review of Computational Intelligence Techniques in Wireless Sensor and Actuator Networks. IEEE Commun. Surv. Tutor. 2018, 20, 2822–2854. [Google Scholar] [CrossRef]
- Curiac, D.I. Towards wireless sensor, actuator and robot networks: Conceptual framework, challenges and perspectives. J. Netw. Comput. Appl. 2016, 63, 14–23. [Google Scholar] [CrossRef]
- Ando, T. Majorization relations for Hadamard products. Linear Algebra Its Appl. 1995, 223–224, 57–64. [Google Scholar] [CrossRef]
- Vuran, M.C.; Akan, Ö.B.; Akyildiz, I.F. Spatio-temporal correlation: Theory and applications for wireless sensor networks. Comput. Netw. 2004, 45, 245–259. [Google Scholar] [CrossRef]
- Natarajan, B.K. Sparse approximate solutions to linear systems. SIAM J. Comput. 1995, 24, 227–234. [Google Scholar] [CrossRef]
- Golub, G.H.; Hansen, P.C.; O’Leary, D.P. Tikhonov regularization and total least squares. SIAM J. Matrix Anal. Appl. 1999, 21, 185–194. [Google Scholar] [CrossRef]
- Mohan, K.; Fazel, M. Iterative reweighted algorithms for matrix rank minimization. J. Mach. Learn. Res. 2012, 13, 3441–3473. [Google Scholar]
- Hu, Y.; Zhang, D.; Ye, J.; Li, X.; He, X. Fast and accurate matrix completion via truncated nuclear norm regularization. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2117–2130. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.; Tang, J.; Yan, S.; Lin, Z. Generalized nonconvex nonsmooth low-rank minimization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 4130–4137. [Google Scholar]
- Sun, T.; Jiang, H.; Cheng, L. Convergence of proximal iteratively reweighted nuclear norm algorithm for image processing. IEEE Trans. Image Process. 2017, 26, 5632–5644. [Google Scholar] [CrossRef] [PubMed]
- Combettes, P.L.; Wajs, V.R. Signal recovery by proximal forward-backward splitting. Multiscale Model. Simul. 2005, 4, 1168–1200. [Google Scholar] [CrossRef]
- Parikh, N.; Boyd, S. Proximal algorithms. Found. Trends Optim. 2014, 1, 127–239. [Google Scholar] [CrossRef]
- Nesterov, Y. Introductory Lectures on Convex Optimization: A Basic Course; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 87. [Google Scholar]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- O’donoghue, B.; Candes, E. Adaptive restart for accelerated gradient schemes. Found. Comput. Math. 2015, 15, 715–732. [Google Scholar] [CrossRef]
- Becker, S.R.; Candès, E.J.; Grant, M.C. Templates for convex cone problems with applications to sparse signal recovery. Math. Program. Comput. 2011, 3, 165. [Google Scholar] [CrossRef]
- Toh, K.C.; Yun, S. An accelerated proximal gradient algorithm for nuclear norm regularized linear least squares problems. Pac. J. Optim. 2010, 6, 15. [Google Scholar]
- Sun, T.; Cheng, L. Reweighted fast iterative shrinkage thresholding algorithm with restarts for l1-l1 minimisation. IET Signal Process. 2016, 10, 28–36. [Google Scholar] [CrossRef]
- Sun, T.; Barrio, R.; Jiang, H.; Cheng, L. Convergence rates of accelerated proximal gradient algorithms under independent noise. Numer. Algorithms 2018, 1–24. [Google Scholar] [CrossRef]
- Piao, X.; Hu, Y.; Sun, Y.; Yin, B.; Gao, J. Correlated spatio-temporal data collection in wireless sensor networks based on low rank matrix approximation and optimized node sampling. Sensors 2014, 14, 23137–23158. [Google Scholar] [CrossRef] [PubMed]
- Sensor Mote Data from Data Sensing Lab. Available online: http://datasensinglab.com/data/ (accessed on 10 October 2018).
- Sensor Data from Intel Berkeley Research Lab. Available online: http://db.csail.mit.edu/labdata/labdata.html (accessed on 15 May 2018).







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Sun, G.; Geng, T.; He, J. Low-Energy Data Collection in Wireless Sensor Networks Based on Matrix Completion. Sensors 2019, 19, 945. https://doi.org/10.3390/s19040945
Xu Y, Sun G, Geng T, He J. Low-Energy Data Collection in Wireless Sensor Networks Based on Matrix Completion. Sensors. 2019; 19(4):945. https://doi.org/10.3390/s19040945
Chicago/Turabian StyleXu, Yi, Guiling Sun, Tianyu Geng, and Jingfei He. 2019. "Low-Energy Data Collection in Wireless Sensor Networks Based on Matrix Completion" Sensors 19, no. 4: 945. https://doi.org/10.3390/s19040945
APA StyleXu, Y., Sun, G., Geng, T., & He, J. (2019). Low-Energy Data Collection in Wireless Sensor Networks Based on Matrix Completion. Sensors, 19(4), 945. https://doi.org/10.3390/s19040945