A Cognitive-Inspired Event-Based Control for Power-Aware Human Mobility Analysis in IoT Devices



Abstract
1. Introduction
2. Related Work
3. Individual Mobility Modeling
3.1. Mobility States
- Observed mobility states: They are detected by system perceptors without involving further processing, i.e., the and states.
- Derived mobility states: They are detected by the working memory when inconsistencies (mismatches) are found between the observed mobility and the cognitive map information, i.e., the and states.
3.2. Motion States Transition
3.3. Predictions of Mobility States
3.4. Mismatches
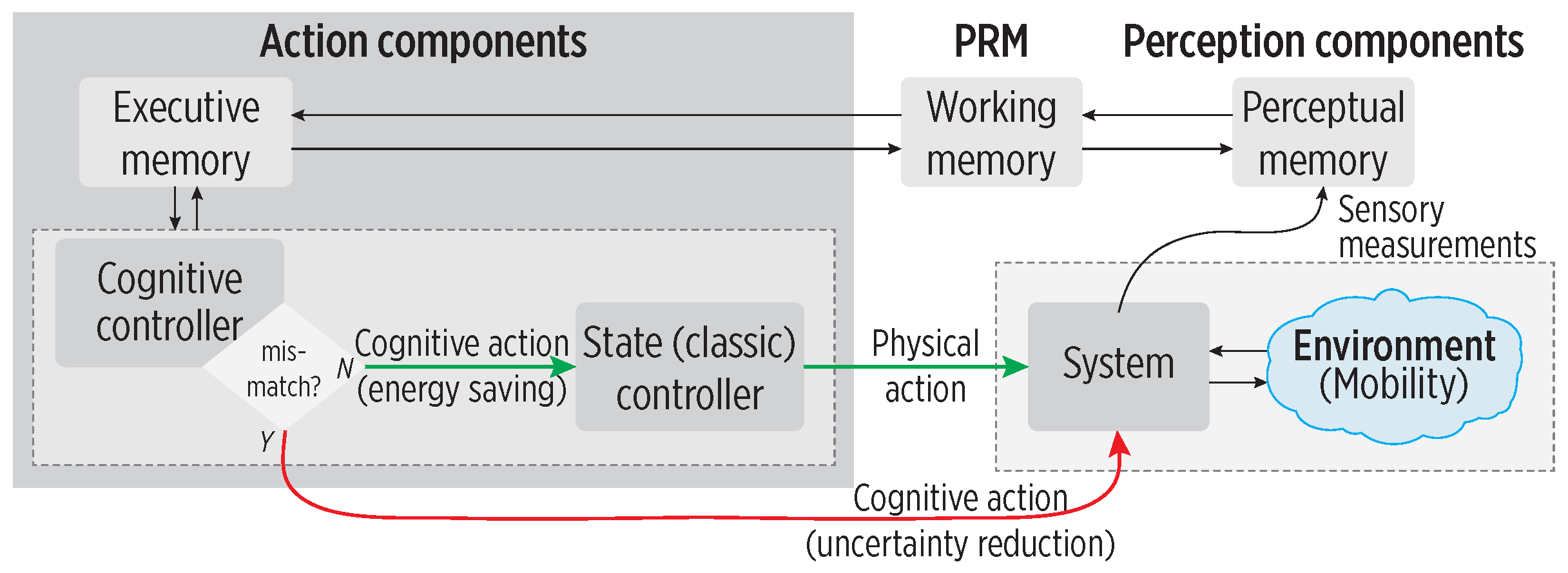
4. Cognitive Control for Power Savings
- To reduce energy consumption: If consistent mobility is found (low uncertainty), then it is possible to rely on the predictions for adjusting the sampling, i.e., the controller reduces the sensors’ sampling rate to save energy (green arrow).
- To reduce mobility uncertainty: If inconsistent mobility is found (high uncertainty due to mobility mismatch), the controller must reduce the information gap by using a sampling focused on improving the mobility perception (red arrow).
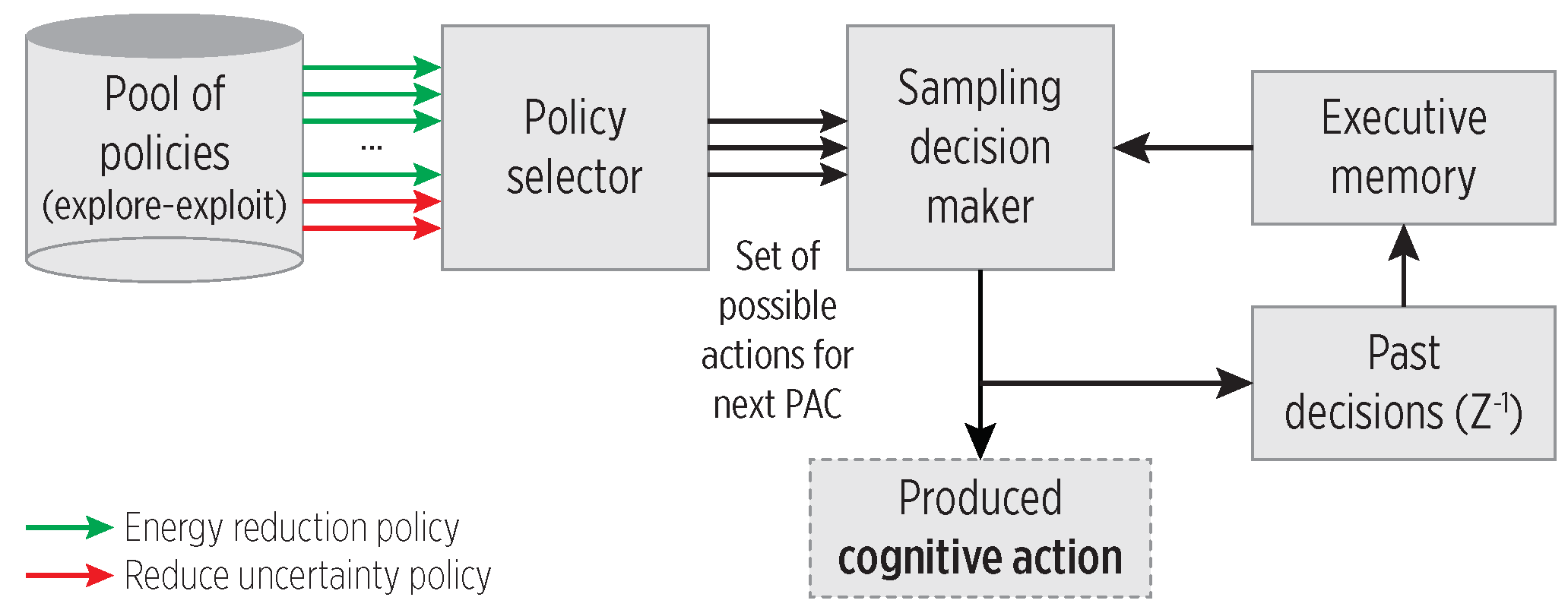
4.1. Exploitation and Exploration Behavior
- Exploitation policies: use a sampling that exploits the PRM’s predictions when mobility uncertainty is low, i.e., they are associated with reducing energy consumption actions suitable when the user roughly moves as expected.
- Exploration policies: are for cases on which predictions are not held, i.e., the CDS does not provide enough spatio-temporal accuracy due to mobility mismatches, and the CC tries to regain tracking accuracy based on the current mobility mode. Thus, these policies are associated with reducing system uncertainty.
4.2. Policies Tailored to Mobility States
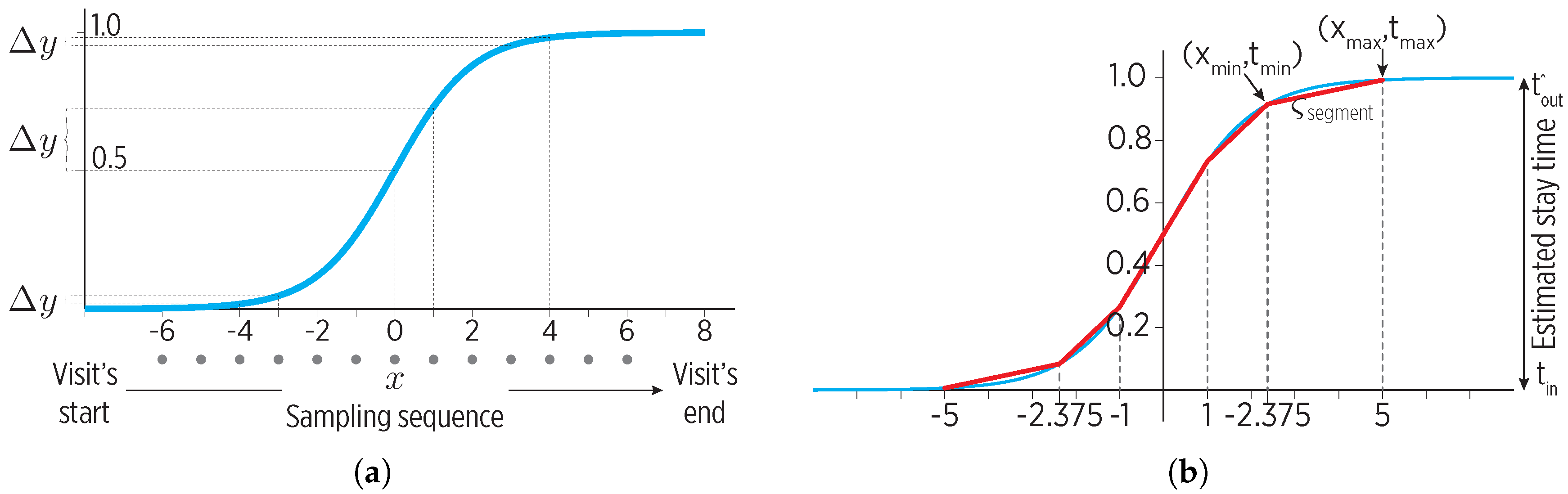
4.2.1. Stay Point State Policy
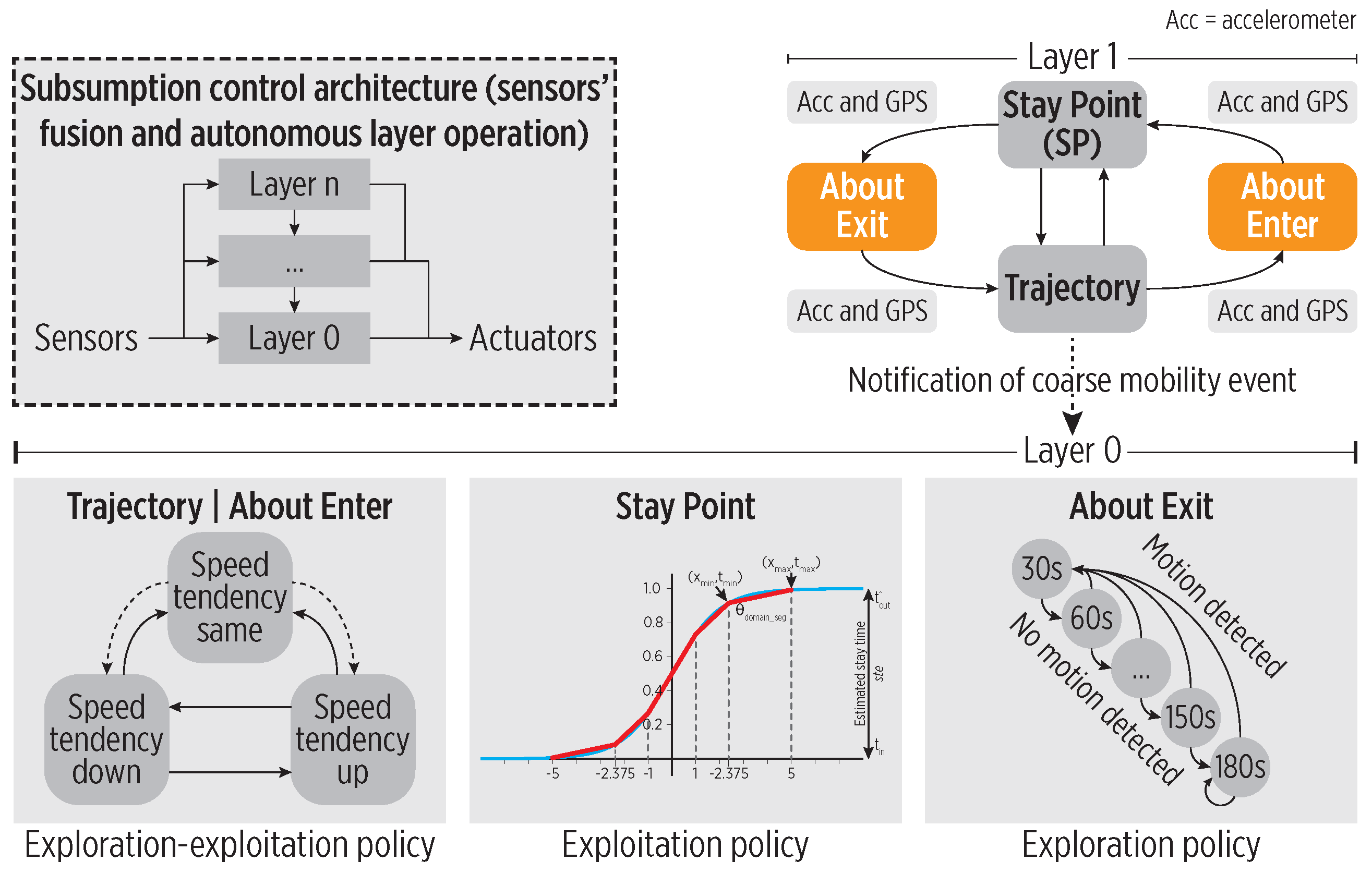
4.2.2. Trajectory State Policy
- Up speed tendency: We select the sampling rate of the fastest transportation mode in the window. This aims to reduce the accuracy loss during location tracking.
- Down speed tendency: We select the average sampling rate of transportation modes in the window. This aims to smooth the decrements in the sampling rate, as the user might start moving again soon.
4.2.3. About Exit State Policy
4.3. Fusion of Mobility Data Sources
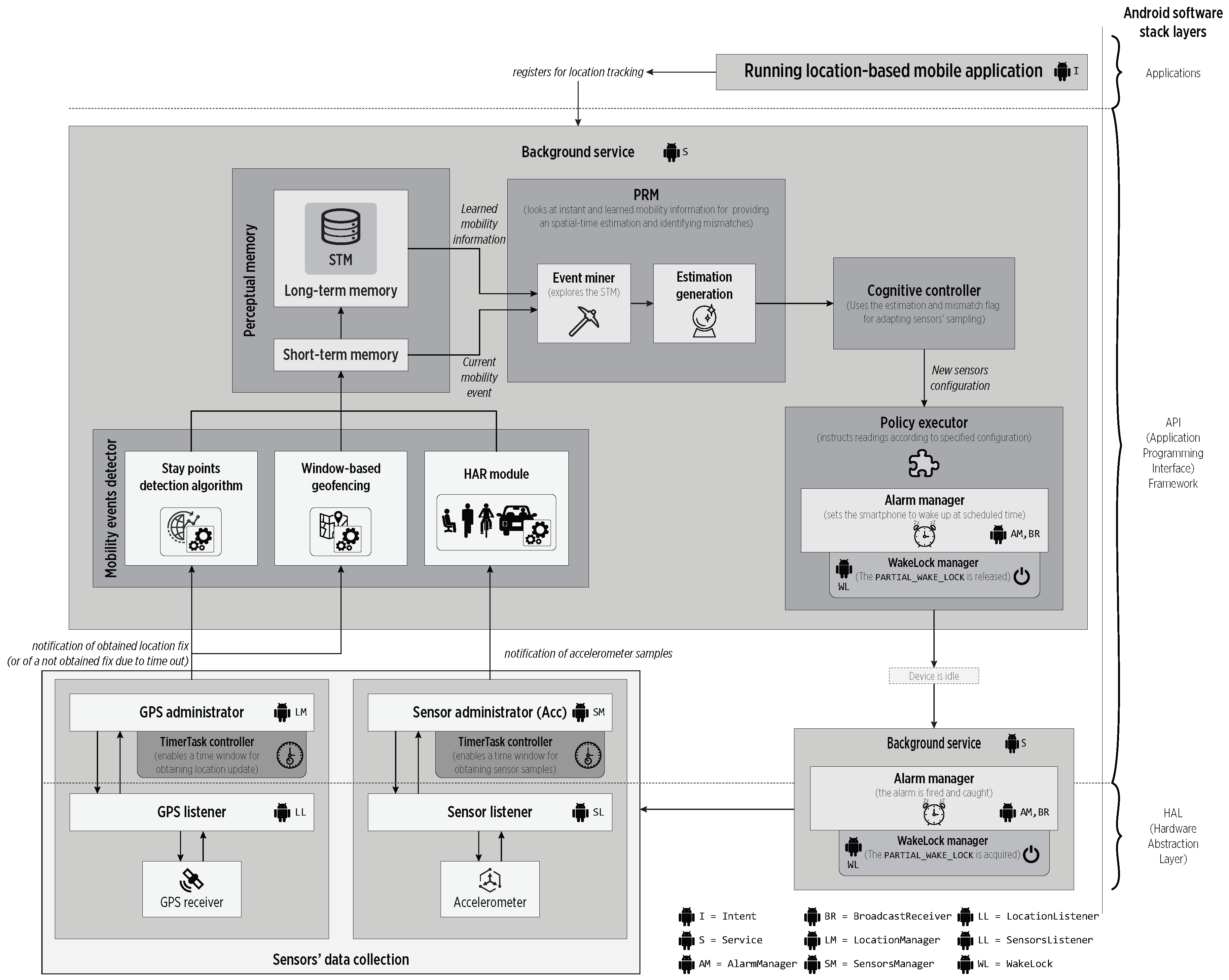
5. CDS Implementation and Experimental Evaluation
5.1. CDS Implementation
5.2. Materials and Methods (Setup)
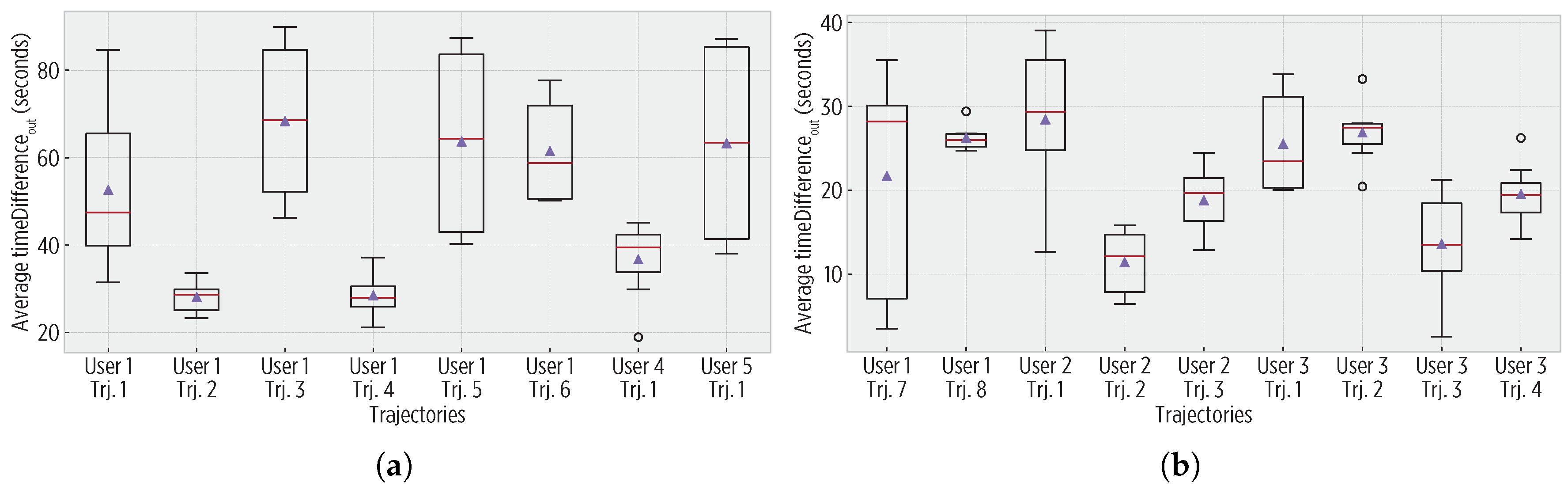
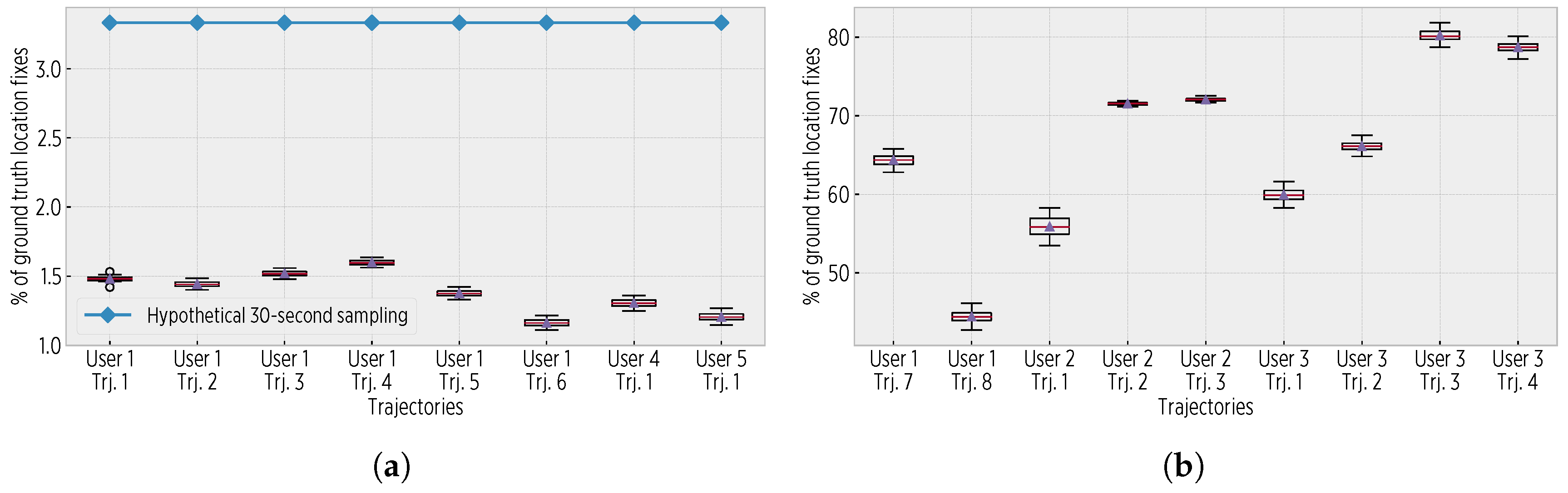
5.3. Spatio-Temporal Accuracy of Mobility Events
5.4. Energy Savings
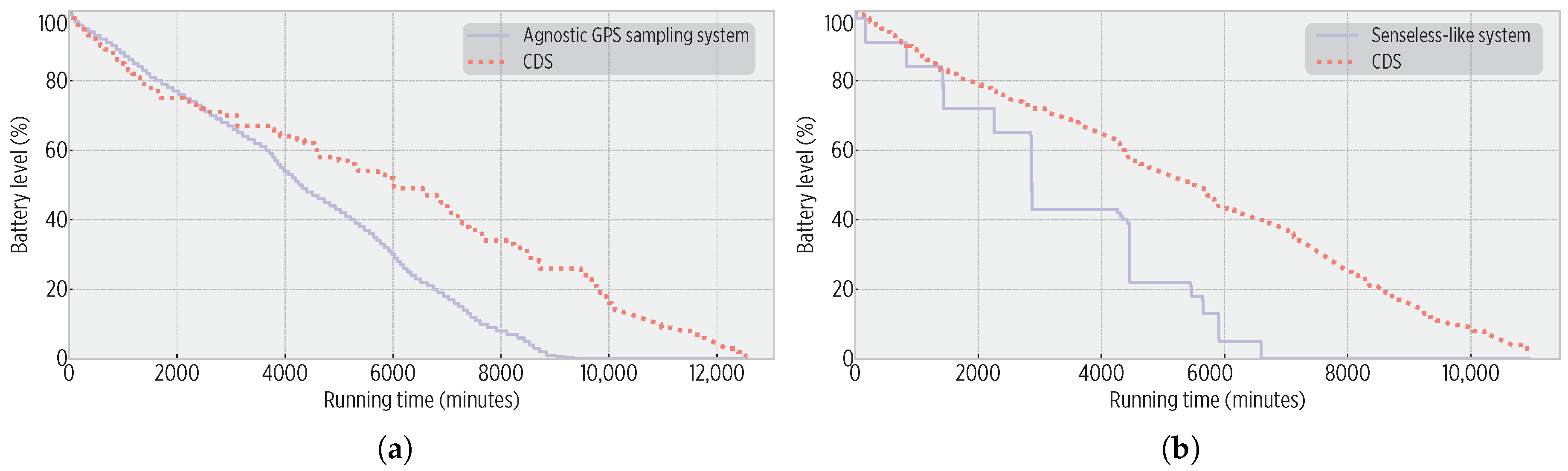
5.5. Comparison against Existing Approaches
- Agnostic GPS sampling: It only collects location data using a 30-s sampling rate. No data processing (mobility inference) or sampling control is performed.
- HAR-assisted GPS sampling (Senseless-like): It triggers a GPS sampling whenever fine-grained motion is detected by the HAR module, as proposed by the Senseless framework [21]. The HAR module uses a 30-s sampling rate.
5.6. Comparison against CDS Variants
- Pure GPS CDS: The CDS exclusively uses GPS data to derive fine-grained mobility (i.e., the transportation mode) based on traveled distance and elapsed time.
- WPS CDS: The CDS employs the WPS location provider rather than GPS. The lack of WPS data was associated with movement (i.e., no access points during trajectories) and its existence with idleness (i.e., user inside a building).
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Park, T.; Abuzainab, N.; Saad, W. Learning How to Communicate in the Internet of Things: Finite Resources and Heterogeneity. IEEE Access 2016, 4, 7063–7073. [Google Scholar] [CrossRef]
- Perez-Torres, R.; Torres-Huitzil, C.; Galeana-Zapien, H. A Cognitive Platform for Energy Efficiency in Location and Mobility Based Services on Smart Sensing Devices. Ph.D. Thesis, CINVESTAV-Tamaulipas, Tamaulipas, México, 2018. [Google Scholar]
- Wang, J.; Wang, Y.; Zhang, D.; Helal, S. Energy Saving Techniques in Mobile Crowd Sensing: Current State and Future Opportunities. IEEE Commun. Mag. 2018, 56, 164–169. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive Dynamic Systems: Perception-Action Cycle, Radar and Radio; Cambridge University Press: New York, NY, USA, 2012. [Google Scholar]
- Haykin, S.; Fatemi, M.; Setoodeh, P.; Xue, Y. Cognitive Control. Proc. IEEE 2012, 100, 3156–3169. [Google Scholar] [CrossRef]
- Verschure, P.F.M.J.; Voegtlin, T.; Douglas, R.J. Environmentally mediated synergy between perception and behaviour in mobile robots. Nature 2003, 425, 620–624. [Google Scholar] [CrossRef] [PubMed]
- Perez-Torres, R.; Torres-Huitzil, C.; Galeana-Zapien, H. An On-Device Cognitive Dynamic Systems Inspired Sensing Framework for the IoT. IEEE Commun. Mag. 2018, 56, 154–161. [Google Scholar] [CrossRef]
- Heemels, W.P.M.H.; Sandee, J.H.; Van Den Bosch, P.P.J. Analysis of event-driven controllers for linear systems. Int. J. Control 2008, 81, 571–590. [Google Scholar] [CrossRef]
- Gratton, G.; Cooper, P.; Fabiani, M.; Carter, C.S.; Karayanidis, F. Dynamics of cognitive control: Theoretical bases, paradigms, and a view for the future. Psychophysiology 2018, 55, e13016. [Google Scholar] [CrossRef]
- Zirnstein, M.; van Hell, J.G.; Kroll, J.F. Cognitive control ability mediates prediction costs in monolinguals and bilinguals. Cognition 2018, 176, 87–106. [Google Scholar] [CrossRef] [PubMed]
- Attal, F.; Mohammed, S.; Dedabrishvili, M.; Chamroukhi, F.; Oukhellou, L.; Amirat, Y. Physical Human Activity Recognition Using Wearable Sensors. Sensors 2015, 15, 31314–31338. [Google Scholar] [CrossRef]
- Liu, L.; Wang, S.; Su, G.; Huang, Z.G.; Liu, M. Towards complex activity recognition using a Bayesian network-based probabilistic generative framework. Pattern Recognit. 2017, 68, 295–309. [Google Scholar] [CrossRef]
- Vallina-Rodriguez, N.; Crowcroft, J. Energy management techniques in modern mobile handsets. IEEE Commun. Surv. Tutor. 2013, 15, 179–198. [Google Scholar] [CrossRef]
- Pérez-Torres, R.; Torres-Huitzil, C.; Galeana-Zapién, H. Power management techniques in smartphone-based mobility sensing systems: A survey. Perv. Mob. Comput. 2016, 31, 1–21. [Google Scholar] [CrossRef]
- Lane, N.D.; Miluzzo, E.; Lu, H.; Peebles, D.; Choudhury, T.; Campbell, A.T. A survey of mobile phone sensing. IEEE Commun. Mag. 2010, 48, 140–150. [Google Scholar] [CrossRef]
- Perez, A.J.; Labrador, M.A.; Barbeau, S.J. G-Sense: A scalable architecture for global sensing and monitoring. IEEE Netw. 2010, 24, 57–64. [Google Scholar] [CrossRef]
- Perez-Torres, R.; Torres-Huitzil, C. A power-aware middleware for location & context aware mobile apps with cloud computing interaction. In Proceedings of the 2012 World Congress on Information and Communication Technologies, WICT 2012, Atlanta, GA, USA, 12–15 March 2012; pp. 691–696. [Google Scholar]
- Ma, Y.; Hankins, R.; Racz, D. iLoc: A framework for incremental location-state acquisition and prediction based on mobile sensors. In Proceedings of the 18th ACM Conference on Information and Knowledge Management, Hong Kong, China, 2–6 November 2009; pp. 1367–1376. [Google Scholar]
- Paek, J.; Kim, J.; Govindan, R. Energy-efficient rate-adaptive GPS-based positioning for smartphones. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, Francisco, CA, USA, 15–18 June 2010; Volume 223–224, pp. 299–314. [Google Scholar]
- Zou, H.; Jiang, H.; Luo, Y.; Zhu, J.; Lu, X.; Xie, L. BlueDetect: An iBeacon-Enabled Scheme for Accurate and Energy-Efficient Indoor-Outdoor Detection and Seamless Location-Based Service. Sensors 2016, 16, 268. [Google Scholar] [CrossRef]
- Abdesslem, F.B.; Phillips, A.; Henderson, T. Less is more: Energy-efficient mobile sensing with senseless. In Proceedings of the 1st ACM workshop on Networking, Systems, and Applications for Mobile Handhelds, Barcelona, Spain, 16–21 August 2009; pp. 61–62. [Google Scholar]
- Mazilu, S.; Blanke, U.; Calatroni, A.; Tröster, G. Low-power ambient sensing in smartphones for continuous semantic localization. In Artificial Intelligence and Lecture Notes in Bioinformatics; Springer: Berlin, Germany, 2013; Volume 8309, pp. 166–181. [Google Scholar]
- Man, Y.; Ngai, E.C.H. Energy-efficient automatic location-triggered applications on smartphones. Comput. Commun. 2014, 50, 29–40. [Google Scholar] [CrossRef]
- Zheng, Y. Trajectory Data Mining. ACM Trans. Intell. Syst. Technol. 2015, 6, 1–41. [Google Scholar] [CrossRef]
- Ma, X.; Cui, Y.; Stojmenovic, I. Energy efficiency on location based applications in mobile cloud computing: A survey. Procedia Comput. Sci. 2012, 10, 577–584. [Google Scholar] [CrossRef]
- Mao, Y.; You, C.; Zhang, J.; Huang, K.; Letaief, K.B. A Survey on Mobile Edge Computing: The Communication Perspective. IEEE Commun. Surv. Tutor. 2017, 19, 2322–2358. [Google Scholar] [CrossRef]
- Chon, Y.; Talipov, E.; Shin, H.; Cha, H. SmartDC: Mobility Prediction-Based Adaptive Duty Cycling for Everyday Location Monitoring. IEEE Trans. Mob. Comput. 2014, 13, 512–525. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, Y.; Li, Q.; Xie, X.; Ma, W.Y. Understanding transportation modes based on GPS data for web applications. ACM Trans. Web 2010, 4, 1–36. [Google Scholar] [CrossRef]
- Brooks, R. A robust layered control system for a mobile robot. IEEE J. Robot. Automat. 1986, 2, 14–23. [Google Scholar] [CrossRef]
- Prescott, T.J.; Redgrave, P.; Gurney, K. Layered Control Architectures in Robots and Vertebrates. Adapt. Behav. 1999, 7, 99–127. [Google Scholar] [CrossRef]
- Developers, A. Optimize for Doze and App Standby. Available online: https://developer.android.com/training/monitoring-device-state/doze-standby.html (accessed on 3 February 2019).
- BT-Q1000eX 10Hz GPS Lap Timer. Available online: http://www.qstarz.com/Products/GPSProducts/BT-Q1000EX-10HZ-F.html (accessed on 3 February 2019).
- Zheng, Y.; Zhou, X. Computing with Spatial Trajectories; Springer New York: New York, NY, USA, 2011. [Google Scholar]
- Piorkowski, M.; Sarafijanovic-Djukic, N.; Grossglauser, M. A parsimonious model of mobile partitioned networks with clustering. In Proceedings of the 2009 First International Communication Systems and Networks and Workshops, Bangalore, India, 5–10 January 2009; pp. 1–10. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Type | Description |
|---|---|---|
| Trajectory () | Observed | The user is moving between stay points, consistent with learned information. |
| Stay point () | Observed | The user is inside a stay point, consistent with learned information. |
| About Exit () | Derived | The user is inside a stay point, although she/he is expected to be already outside the place, i.e., there is inconsistency with respect of learned information. |
| About Enter () | Derived | The user is moving between stay points, although she/he is expected to be already inside a place, i.e., there is inconsistency with respect of learned information. |
| Feature/Smartphone | Motorola Nexus 6 | Samsung Galaxy A5 |
|---|---|---|
| System on Chip (SoC) | Qualcomm Snapdragon 805 | Exynos 7580 Octa |
| Processor | Quad-core Krait 450 2.7 GHz | Octa-core Cortex-A53 1.6 GHz |
| GPU | Adreno 420 | Mali T720MP2 |
| Memory (internal storage) | 3 GB RAM (64 GB) | 2 GB RAM (16 GB) |
| Battery capacity | 3220 mAh | 2900 mAh |
| Battery technology | Lithium polymer (Li-Po) | Lithium-ion |
| Android OS | Nougat (7.1) | Nougat (7.0) |
| Cognitive Controller | Sigmoid segments (): | |
| Time separations (): | seconds | |
| seconds | ||
| seconds | ||
| seconds | ||
| Trajectory sampling: | 30-s fixed sampling rate | |
| About exit sampling: | 60-s fixed sampling rate |
| Cognitive Controller | Sigmoid segments (): | |
| Time separations (): | seconds | |
| sampling rates: | Vehicle: 30 s, Biking: 60 s, Walking: 150 s, Static: 210 s (for speed tendency processing), | |
| sampling rates: | {30, 60, 90, 120, 150, 180} s (for the FSM based on motion detection) |
| HAR Interventions | Requested Fixes | % of Ground Truth Fixes | |
|---|---|---|---|
| GPS agnostic sampling | - | 17,800 | 3.32 |
| CDS | 7090 | 6639 (5213 at GPS agnostic end) | 0.92 |
| HAR Interventions | Requested Fixes | % of Ground Truth Fixes | |
|---|---|---|---|
| Senseless-like system | 13,251 | 399 | 0.09 |
| CDS | 5671 (4593 at Senseless-like end) | 3236 (2004 at Senseless-like end) | 0.49 |
| Spatial | Temporal | ||
|---|---|---|---|
| Detected stay points | 3 | Missed visits | 0 of 20 |
| Missed stay points | 0 | Average missed visits time | 0 |
| Average centroid distance (m) | 16.28 | Average (s) | 15.33 |
| Average trajectory distance (m) | 65.40 | Average (s) | 29.97 |
| Spatial | Temporal | ||
|---|---|---|---|
| Detected stay points | 6 | Missed visits | 5 of 27 |
| Missed stay points | 0 | Average missed visits time | 33.60 |
| Average centroid distance (m) | 60.62 | Average (s) | 21.5 |
| Average trajectory distance (m) | 77.24 | Average (s) | 56.27 |
| HAR Interventions | Requested Fixes | % of Ground Truth Fixes | |
|---|---|---|---|
| GPS + HAR CDS | 4747 | 2819 | 0.39 |
| Pure GPS CDS | - | 8077 6318 at GPS + HAR CDS end) | 0.88 |
| HAR Interventions | Requested Fixes | % of Ground Truth Fixes | |
|---|---|---|---|
| WPS-CDS | 4264 | 942 | 0.24 |
| CDS | 5351 (4219 at WPS-CDS end) | 1888 (995 at WPS-CDS end) | 0.31 |
| Spatial | Temporal | ||||
|---|---|---|---|---|---|
| GPS + HAR CDS | Pure GPS CDS | GPS + HAR CDS | Pure GPS CDS | ||
| Detected stay points | 6 | 7 | Missed visits | 3 of 37 | 7 of 46 |
| Missed stay points | 1 | 0 | Avg missed visits time | 24.33 | 36.71 |
| Avg centroid distance (m) | 34.15 | 32.66 | Avg (s) | 26.26 | 33.10 |
| Avg trajectory distance (m) | 74.83 | 43.83 | Avg (s) | 43.47 | 71.10 |
| Spatial | Temporal | ||||
|---|---|---|---|---|---|
| CDS | WPS-CDS | CDS | WPS-CDS | ||
| Detected stay points | 3 | 3 | Missed visits | 1 | 0 |
| Missed stay points | 0 | 0 | Avg missed visits time | 51.00 | 0 |
| Avg centroid distance (m) | 46.02 | 10.01 | Avg (s) | 15.76 | 123.71 |
| Avg trajectory distance (m) | 60.16 | - | Avg (s) | 35.41 | 15.92 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Torres, R.; Torres-Huitzil, C.; Galeana-Zapién, H. A Cognitive-Inspired Event-Based Control for Power-Aware Human Mobility Analysis in IoT Devices. Sensors 2019, 19, 832. https://doi.org/10.3390/s19040832
Pérez-Torres R, Torres-Huitzil C, Galeana-Zapién H. A Cognitive-Inspired Event-Based Control for Power-Aware Human Mobility Analysis in IoT Devices. Sensors. 2019; 19(4):832. https://doi.org/10.3390/s19040832
Chicago/Turabian StylePérez-Torres, Rafael, César Torres-Huitzil, and Hiram Galeana-Zapién. 2019. "A Cognitive-Inspired Event-Based Control for Power-Aware Human Mobility Analysis in IoT Devices" Sensors 19, no. 4: 832. https://doi.org/10.3390/s19040832
APA StylePérez-Torres, R., Torres-Huitzil, C., & Galeana-Zapién, H. (2019). A Cognitive-Inspired Event-Based Control for Power-Aware Human Mobility Analysis in IoT Devices. Sensors, 19(4), 832. https://doi.org/10.3390/s19040832