Roller Bearing Performance Degradation Assessment Based on Fusion of Multiple Features of Electrostatic Sensors



Abstract
1. Introduction
2. Feature Extraction
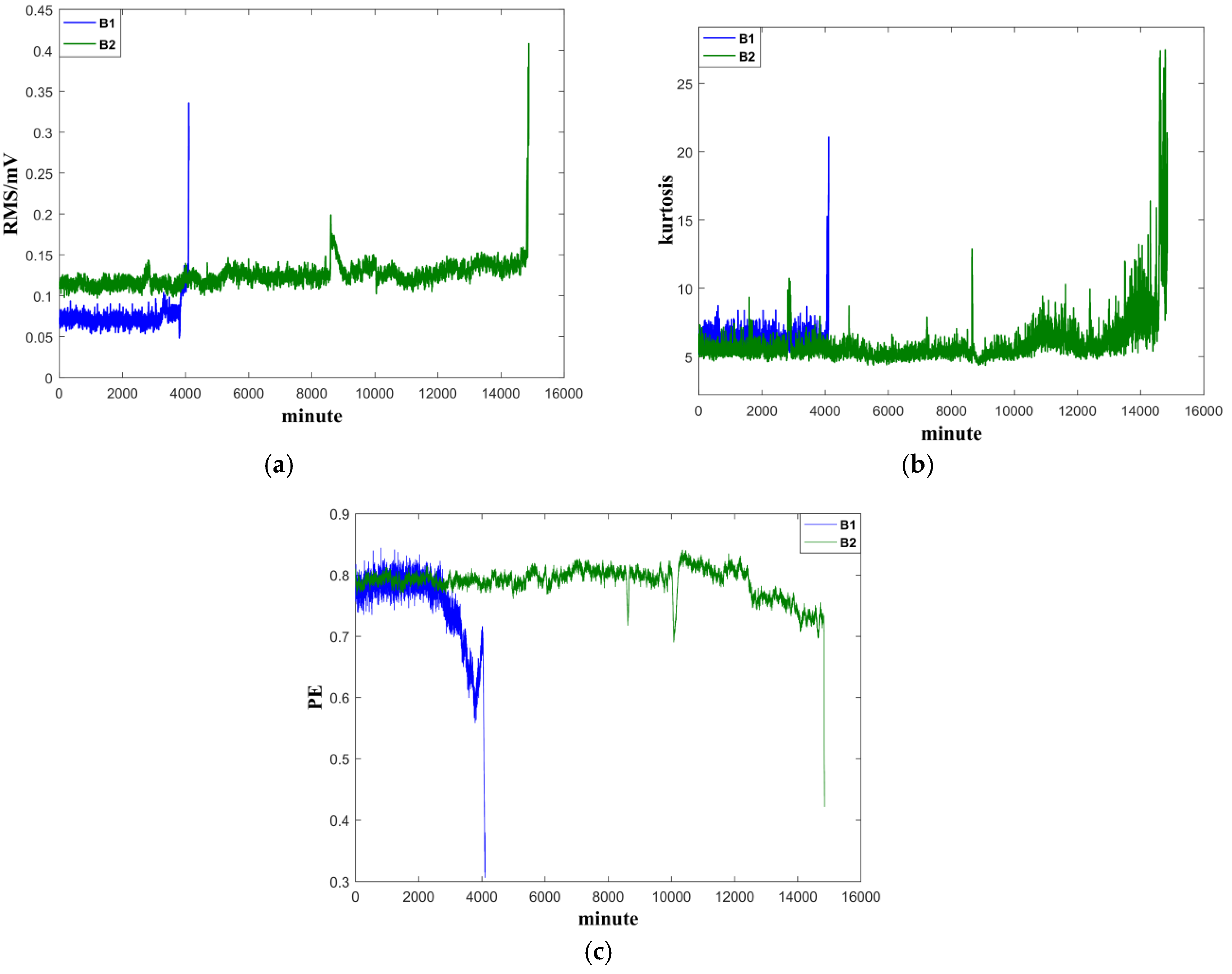
2.1. Traditional Features
2.2. Permutation Entropy (PE)
2.3. Spectrum Regression, SR
3. Performance Degradation Assessment Model with the Fusion of Multiple Features Based on GMM
3.1. Gaussian Mixture Model (GMM)
3.2. Performance Assessment Model
- (1)
- Extract the features and use the SR method to reduce the dimensions of the original feature space;
- (2)
- Select the normal state data to establish the GMM model and determine the model parameters;
- (3)
- Calculate the BID. The sliding average method is used to smooth the indicator and improve the sensitivity and reliability of the indicator:where is the input signal; the output signal; and M is the number of average sliding points, which is considered as 5 in this paper. We implemented a prior experiment that used more than 5 sliding points, and the results show that it does not detect abnormities as early as possible. We also used less than 5 sliding points, and the results showed that it cannot reflect the trend of degradation as well as the 5-point sliding average;
- (4)
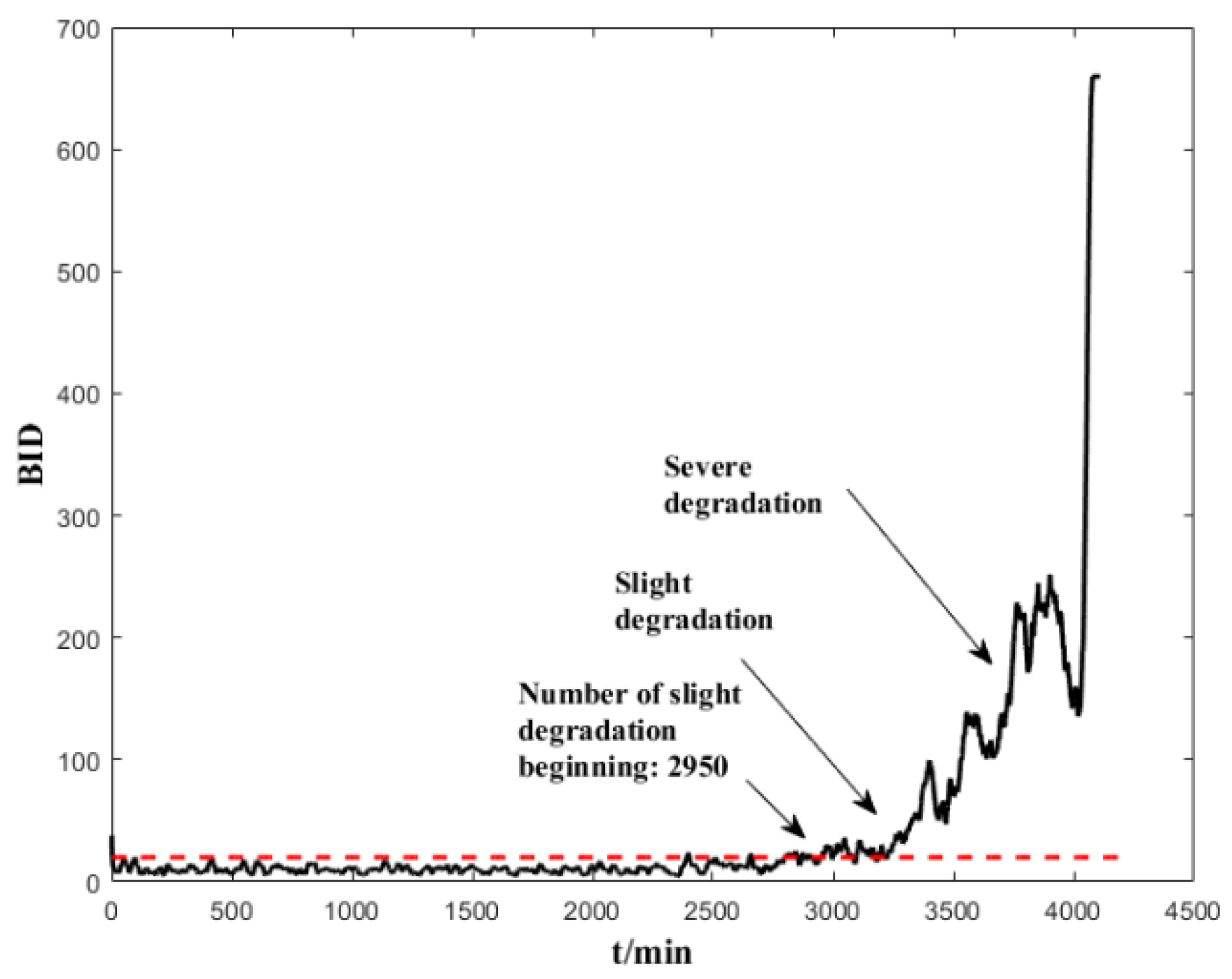
- Establish the control line. To be able to set off an alarm when a slight degradation occurs, a control line needs to be established based on the kernel density estimation (KDE) [28]. When the performance degradation occurs, an alarm will be triggered. There are some kernel functions used for KDE; in this paper, the Gaussian kernel function is often used. Depending on the confidence level required, 99% (i.e., the false alarm rate is 1% for healthy bearing), the threshold BID can be calculated to define the confidence bound.
- (1)
- Based on step 1 of off-line modeling, the features are extracted and dimensional reduction is performed;
- (2)
- Calculate the BID distance between the test data and the normal state GMM model;
- (3)
- Perform a quantitative assessment of the bearing performance and determine the condition of bearings.
4. Experimental Results
4.1. Test Rig
4.2. Classification of Degradation Degrees
4.3. Bearing Performance Degradation Assessment
5. Comparison and Analysis
5.1. Comparison with the Other Two GMM-Based Indicators
5.2. Comparison with SVDD Assessment Method
5.3. Comparison of Electrostatic Monitoring and Vibration Monitoring
6. Conclusions
- (1)
- Compared to the feature extraction methods based on PCA and LPP, the spectral regression has showed better performance in identifying different stages of degradation and requires less computation time;
- (2)
- The permutation entropy serves to extract and amplify small changes in the time sequence, which constitutes a useful complement to the conventional time domain and frequency domain parameters in electrostatic monitoring;
- (3)
- Compared to the NLLP BIP indicators and SVDD evaluation methods, the method (SR–GMM–BID) proposed in this paper can detect the occurrence of performance degradation much earlier;
- (4)
- With the application of the methods proposed in this paper, the electrostatic monitoring can accurately detect early degradation compared to the vibration monitoring, providing more time for making maintenance decisions.
Author Contributions
Funding
Conflicts of Interest
References
- Lei, Y.; Lin, J.; He, Z.; Zuo, M. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Henao, H.; Capolino, G.A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in Fault Diagnosis for Electrical Machines: A Review of Diagnostic Techniques. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Frosini, L.; Harlisca, C.; Szabo, L. Induction Machine Bearing Fault Detection by Means of Statistical Processing of the Stray Flux Measurement. IEEE Trans. Ind. Electron. 2015, 62, 1846–1854. [Google Scholar] [CrossRef]
- Immovilli, F.; Bellini, A.; Rubini, R.; Tassoni, C. Diagnosis of bearing faults in induction machines by vibration or current signals: A critical comparison. IEEE Trans. Ind. Appl. 2010, 46, 1350–1359. [Google Scholar] [CrossRef]
- Harvey, T.J.; Wood, R.J.K.; Powrie, H.E.G. Electrostatic wear monitoring of rolling element bearings. Wear 2007, 263, 1492–1501. [Google Scholar] [CrossRef]
- Craig, M.; Harvey, T.J.; Wood, R.J.K.; Masuda, K.; Kawabata, M.; Powrie, H.E.G. Advanced condition monitoring of tapered roller bearings, Part 1. Tribol. Int. 2009, 42, 1846–1856. [Google Scholar] [CrossRef]
- Sun, J.; Zuo, H.; Liu, P.; Wen, Z. Experimental study on engine gas-path component fault monitoring using exhaust gas electrostatic signal. Meas. Sci. Technol. 2013, 24, 5107. [Google Scholar] [CrossRef]
- Liu, P.; Zuo, H.; Sun, J. The Electrostatic Sensor Applied to the Online Monitoring Experiments of Combustor Carbon Deposition Fault in Aero-Engine. IEEE Sens. J. 2014, 14, 686–694. [Google Scholar]
- Zhang, Y.; Zuo, H.; Bai, F. Feature extraction for rolling bearing fault diagnosis by electrostatic monitoring sensors. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 1887–1903. [Google Scholar] [CrossRef]
- Liu, R.; Zuo, H. The Mathematical Model, Simulation and Experimental Calibration of Electrostatic Wear-site Sensor. IEEE Sens. J. 2017, 17, 2428–2438. [Google Scholar]
- Hemmati, F.; Orfali, W.; Gadala, M.S. Roller bearing acoustic signature extraction by wavelet packet transform, applications in fault detection and size estimation. Appl. Acoust. 2016, 104, 101–118. [Google Scholar] [CrossRef]
- Hemmati, F.; Miraskari, M.; Gadala, M.S. Application of wavelet packet transform in roller bearing fault detection and life estimation. J. Phys. Conf. Ser. 2018, 1074, 012142. [Google Scholar] [CrossRef]
- Ai, Y.T.; Guan, J.Y.; Fei, C.W.; Tian, J.; Zhang, F.L. Fusion information entropy method of rolling bearing fault diagnosis based on n-dimensional characteristic parameter distance. Mech. Syst. Signal Process. 2017, 88, 123–136. [Google Scholar] [CrossRef]
- Moore, B. Principal component analysis in linear systems: Controllability, observability, and model reduction. IEEE Trans. Autom. Control 2003, 26, 17–32. [Google Scholar] [CrossRef]
- He, X. Locality preserving projections. Adv. Neural Inf. Process. Syst. 2002, 16, 186–197. [Google Scholar]
- Cai, D.; He, X.; Han, J. Spectral Regression for Efficient Regularized Subspace Learning. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 17–21 October 2007. [Google Scholar]
- Yu, J.B. Bearing performance degradation assessment using locality preserving projections. Expert Syst. Appl. 2011, 38, 7440–7450. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.; Xu, J.; Wang, P. Performance Degradation Assessment of Rolling Element Bearings Based on an Index Combining SVD and Information Exergy. Entropy 2014, 16, 5400–5415. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, X.; Niu, M. Rolling bearing fault diagnosis using an optimization deep belief network. Meas. Sci. Technol. 2015, 26, 115002. [Google Scholar] [CrossRef]
- Jiang, H.; Chen, J.; Dong, G.; Wang, R. An intelligent performance degradation assessment method for bearings. J. Vib. Control 2016, 23, 3023–3040. [Google Scholar] [CrossRef]
- Rai, A.; Upadhyay, S.H. Bearing performance degradation assessment based on a combination of empirical mode decomposition and k-medoids clustering. Mech. Syst. Signal Process. 2017, 93, 16–29. [Google Scholar] [CrossRef]
- Wang, D.; Tsui, K.L. Theoretical investigation of the upper and lower bounds of a generalized dimensionless bearing health indicator. Mech. Syst. Signal Process. 2018, 98, 890–901. [Google Scholar] [CrossRef]
- Chen, S.L.; Wood, R.J.K.; Wang, L.; Callan, R.; Powrie, H.E.G. Wear detection of rolling element bearings using multiple-sensing technologies and mixture-model-based clustering method. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2008, 222, 207–218. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Ouyang, G.; Richards, D.A. Predictability analysis of absence seizures with permutation entropy. Epilepsy Res. 2007, 77, 70–74. [Google Scholar] [CrossRef] [PubMed]
- Yan, R.; Liu, Y.; Gao, R.X. Permutation entropy: A nonlinear statistical measure for status characterization of rotary machines. Mech. Syst. Signal Process. 2012, 29, 474–484. [Google Scholar] [CrossRef]
- Dempstera, A.P.; Lairdn, N.M.; Rubind, D.B. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. Ser. B 1977, 39, 1–38. [Google Scholar] [CrossRef]
- Yu, J. A hybrid feature selection scheme and self-organizing map model for machine health assessment. Appl. Soft Comput. 2011, 11, 4041–4054. [Google Scholar] [CrossRef]
- Yu, J. Bearing performance degradation assessment using locality preserving projections and Gaussian mixture models. Mech. Syst. Signal Process. 2011, 25, 2573–2588. [Google Scholar] [CrossRef]
- Pan, Y.; Chen, J.; Guo, L. Robust bearing performance degradation assessment method based on improved wavelet packet-support vector data description. Mech. Syst. Signal Process. 2009, 23, 669–681. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time-Domain Feature Parameters | Frequency-Domain Feature Parameters | ||
|---|---|---|---|
| Feature | Equation | Feature | Equation |
| Root mean square | Frequency centre | ||
| Standard deviation | Root mean square frequency | ||
| Peak-Peak | Standard deviation frequency | ||
| Skewness | Spectrum peak ratio inner | ||
| Kurtosis | Spectrum peak ratio outer | ||
| Crest factor | where s(k) is a spectrum for k = 1, 2, …, K, K is the number of spectrum lines; is the frequency value of the Kth spectrum line; , and are, respectively, the peak values of the hth (h = 1, 2, …, H, H is the number of harmonics) harmonics of the characteristic frequencies for bearing outer race (), inner race (), which can be calculated according to the following equations: , . is the shaft rotational frequency; is the roller number; is the contact angle; d and D are the roller and pitch diameters, respectively. | ||
| Impulse factor | |||
| Clearance factor | |||
| Shape factor | |||
| where x(n) is a signal series for n = 1, 2, …, N, N is the number of data points. | |||
| Algorithm | Accuracy Rate (%) | Time (s) |
|---|---|---|
| PCA | 84.7% | 3.059 |
| LPP | 96% | 3.276 |
| SR | 100% | 1.814 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wang, A.; Zuo, H. Roller Bearing Performance Degradation Assessment Based on Fusion of Multiple Features of Electrostatic Sensors. Sensors 2019, 19, 824. https://doi.org/10.3390/s19040824
Zhang Y, Wang A, Zuo H. Roller Bearing Performance Degradation Assessment Based on Fusion of Multiple Features of Electrostatic Sensors. Sensors. 2019; 19(4):824. https://doi.org/10.3390/s19040824
Chicago/Turabian StyleZhang, Ying, Anchen Wang, and Hongfu Zuo. 2019. "Roller Bearing Performance Degradation Assessment Based on Fusion of Multiple Features of Electrostatic Sensors" Sensors 19, no. 4: 824. https://doi.org/10.3390/s19040824
APA StyleZhang, Y., Wang, A., & Zuo, H. (2019). Roller Bearing Performance Degradation Assessment Based on Fusion of Multiple Features of Electrostatic Sensors. Sensors, 19(4), 824. https://doi.org/10.3390/s19040824