3D Path Planning for the Ground Robot with Improved Ant Colony Optimization †

Abstract
1. Introduction
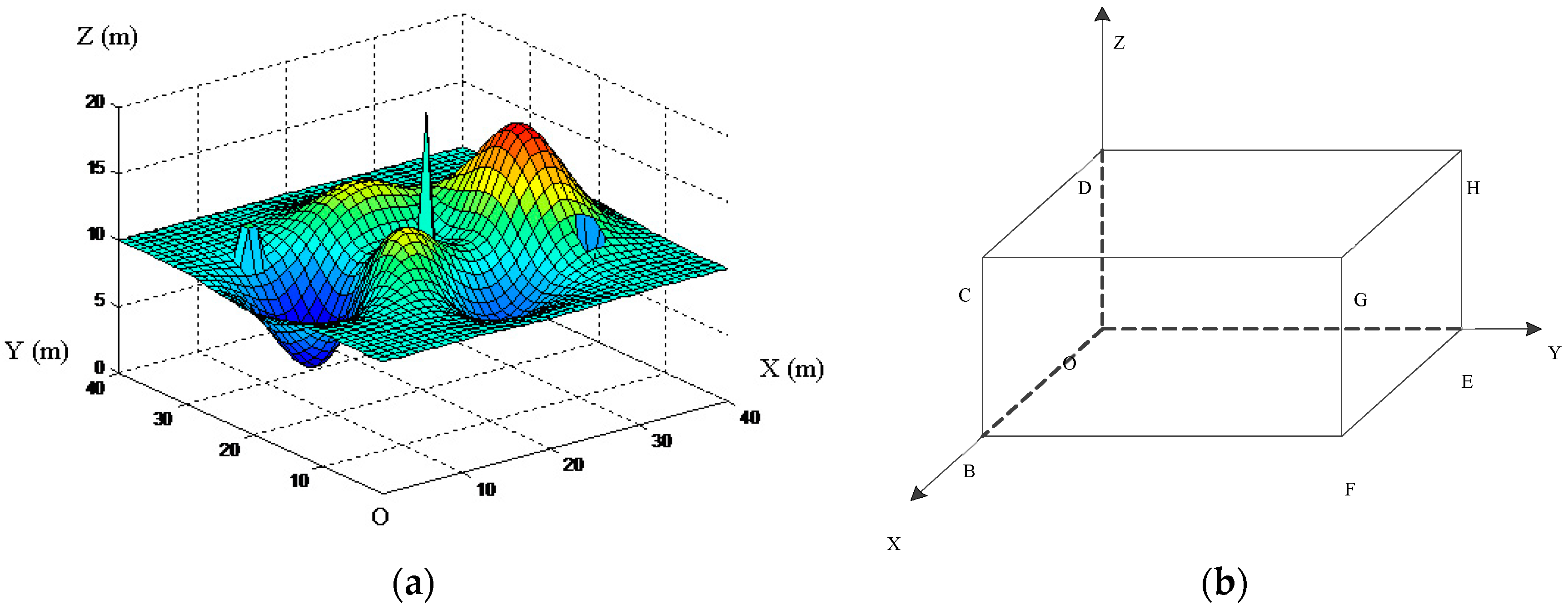
- The environment of path planning is three-dimensional space. This paper adopts a 3D grid method for 3D environment modeling. Before using the 3D grid method, a two-step process is implemented, which simplifies the complex 3D terrain.
- This paper designs the basic pheromone update, which uses the combination of a local pheromone update and a global pheromone update. More importantly, this paper improved the method of global pheromone updating, forming an improved pheromone update.
- In this paper, the calculation of safety value function is presented and incorporated into the heuristic function of the ant colony algorithm. This paper also designs two ways to calculate safety values. The first way is to calculate the safety value in the path planning stage. The second way is to calculate the safety value in the environment modeling phase. Finally, it is concluded that calculating the safety value in advance in the environmental modeling stage and calling it directly in the path planning stage (the second way) can reduce the running time of the algorithm and improve the running efficiency.
- This paper adopts a 3D deadlock-free mechanism. When an ant has no next point to choose from, set the pheromone of the current point to 0, and then return to the previous point to find a feasible path. If it is still deadlocked, continue to set to 0 and return. The deadlock problem of robots can be effectively solved by using this mechanism.
- This paper designs two ant colony optimization algorithms: a basic ant colony algorithm and an improved ant colony algorithm. The basic ant colony algorithm adopts a basic pheromone update, and the improved ant colony algorithm adopts an improved pheromone update. The simulation results show that the improved ant colony algorithm outperforms the basic ant colony algorithm in path planning.
2. 3D Environment Modeling
3. An Overview of the Ant Colony Algorithm
3.1. The Mathematical Model of Ant Colony Optimization
3.2. Pheromone Update
3.2.1. Local Pheromone Update
3.2.2. Global Pheromone Update
4. 3D Path Planning with Ant Colony Optimization
4.1. Basic and Improved Pheromone Update
4.1.1. Basic Pheromone Update
4.1.2. Improved Pheromone Update
4.2. Design of a Heuristic Function with Safety Value Introduced
4.2.1. Heuristic Function Design
4.2.2. Introduction of Safety Value Function
4.2.3. Two Methods of Introducing a Safety Value
4.3. Search Pattern Design
- Step1.
- Determine the visible area of the point and identify feasible points.
- Step2.
- Compute the heuristic value of all the visual points according to the heuristic function, Equation (10).
- Step3.
- Compute the selection probability of all the visual points according to Equation (11):
- Step4.
- Based on every point’s selection probability, use the roulette method to determine the next point .
4.4. Deadlock-Free Mechanism
4.4.1. 2D Deadlock-Free Mechanism
4.4.2. 3D Deadlock-Free Mechanism
4.5. The Overall Flow of Ant Colony Optimization
- Step1.
- Model the robot workspace and initialize all parameters. Determine the start point and end point of the robot in 3D space, and put all ants in the start point.
- Step2.
- Set the discrete point ant g (g = 1, 2, …, r) located as center, calculate the probability of selecting every discrete point in the visible field according to Equation (11), and select the next point according to the roulette method.
- Step3.
- Perform local pheromone update for every selected point according to Equation (4).
- Step4.
- Judge whether or not the ant falls into a deadlock. If so, call the 3D deadlock-free mechanism and return to step 2.
- Step5.
- Judge whether or not the whole path of an ant is constructed. If so, plus one to the serial number of the ant.
- Step6.
- Judge whether or not that all ants have completed a path construction. If so, perform global pheromone update, and enter the next loop iteration.
- Step7.
- Judge whether or not the program meets the stagnation conditions. If so, output the results.
5. Simulation Results and Analyses
5.1. Analysis and Selection of Algorithm Parameters
5.1.1. The Choice of Ant Number
5.1.2. Combination of , , and
5.2. Comparison Simulations of the Basic and Improved Ant Colony Algorithm
5.2.1. Comparison Simulations about Different Terrains
5.2.2. Comparison Simulations about Different Starting and End Points
5.3. Comparison Simulations of Algorithm Running Time
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rey, B.; Aleixos, N.; Cubero, S.; Blasco, J. A Field Robot to Detect Olive Trees Infected by Xylella Fastidiosa Using Proximal Sensing. Remote Sens. 2019, 11, 221. [Google Scholar] [CrossRef]
- Wang, J.; Luo, B.; Zeng, M.; Meng, Q. A Wind Estimation Method with an Unmanned Rotorcraft for Environmental Monitoring Tasks. Sensors 2018, 18, 4504. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Qi, J.; Miao, Y.C.; Sun, H.X.; Li, J.H. A new robot navigation algorithm based on a double-layer ant algorithm and trajectory optimization. IEEE Trans. Indust. Electron. 2018. [Google Scholar] [CrossRef]
- Liu, H.; Jin, C.; Yang, B.; Zhou, A. Finding Top-k Shortest Paths with Diversity. IEEE Trans. Knowl. Data Eng. 2018, 30, 488–502. [Google Scholar] [CrossRef]
- Lee, H.B.; Kim, H.; Kim, H. Planning and Control for Collision-Free Cooperative Aerial Transportation. IEEE Trans. Autom. Sci. Eng. 2018, 15, 189–201. [Google Scholar] [CrossRef]
- Wang, X.; Xue, L.; Yan, Y.; Gu, X. Welding Robot Collision-Free Path Optimization. Appl. Sci. 2017, 7, 89. [Google Scholar] [CrossRef]
- Jin, J.; Chung, W. Obstacle Avoidance of Two-Wheel Differential Robots Considering the Uncertainty of Robot Motion on the Basis of Encoder Odometry Information. Sensors 2019, 19, 289. [Google Scholar] [CrossRef]
- Jiang, A.; Yao, X.; Zhou, J. Research on path planning of real-time obstacle avoidance of mechanical arm based on genetic algorithm. J. Eng. 2018, 16, 1579–1586. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, X.L.; Zhang, R. Trajectory Design for Completion Time Minimization in UAV-Enabled Multicasting. IEEE Trans. Wirel. Commun. 2018, 17, 2233–2246. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning. IEEE Trans. Ind. Inf. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Daniel, K.; Nash, A.; Koenig, S.; Felner, A. Theta*: Any-Angle Path Planning on Grids. J. Artif. Int. Res. 2014. [Google Scholar] [CrossRef]
- Maciejewski, A.A.; Fox, J.J. Path planning and the topology of configuration space. IEEE Trans. Robot. Autom. 1993, 9, 444–456. [Google Scholar] [CrossRef]
- Iiiah, N.R.; Davide, S.; Roland, S. Introduction to Autonomous Mobile Robots, 2nd ed.; PHI Learning Private Limited: New Delhi, India, 2011; ISBN 0262015358. [Google Scholar]
- Fusic, S.J.; Ramkumar, P.; Hariharan, K. Path planning of robot using modified dijkstra Algorithm. In Proceedings of the 2018 National Power Engineering Conference (NPEC 2018), Madurai, India, 9–10 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Zhou, F.; Hu, P.; Feng, X.; Song, Y. Improved prim algorithm and its application in unmanned aerial vehicle cruise system. In Proceedings of the 2017 Chinese Control and Decision Conference (CCDC 2017), Chongqing, China, 28–30 May 2017; pp. 6022–6027. [Google Scholar] [CrossRef]
- Hayat, S.; Kausar, Z. Mobile robot path planning for circular shaped obstacles using simulated annealing. In Proceedings of the 2015 International Conference on Control, Automation and Robotics (ICCAR 2015), Singapore, 20–22 May 2015; pp. 69–73. [Google Scholar] [CrossRef]
- Zhang, H.; Cheng, Y. Path Finding Using A* Algorithm. Microcomput. Inf. 2007, 17, 238–308. [Google Scholar]
- Wang, X.; Liang, Y.; Liu, S.; Xu, L. Bearing-Only Obstacle Avoidance Based on Unknown Input Observer and Angle-Dependent Artificial Potential Field. Sensors 2019, 19, 31. [Google Scholar] [CrossRef] [PubMed]
- Antonelli, G.; Chiaverini, S.; Fusco, G. A Fuzzy-Logic-Based Approach for Mobile Robot Path Tracking. IEEE Trans. Fuzzy Syst. 2007, 15, 211–221. [Google Scholar] [CrossRef]
- Ma, Y.; Gong, Y.; Xiao, C.; Gao, Y.; Zhang, J. Path Planning for Autonomous Underwater Vehicles: An Ant Colony Algorithm Incorporating Alarm Pheromone. IEEE Trans. Veh. Technol. 2019, 68, 141–154. [Google Scholar] [CrossRef]
- Martin, R.A.; Rojas, I.; Franke, K.; Hedengren, J.D. Evolutionary View Planning for Optimized UAV Terrain Modeling in a Simulated Environment. Remote Sens. 2016, 8, 26. [Google Scholar] [CrossRef]
- Motonaka, K.; Watanabe, K.; Maeyama, S. 3-dimensional kinodynamic motion planning for an X4-Flyer using 2-dimensional harmonic potential fields. In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Seoul, Korea, 22–25 October 2014; pp. 2093–7121. [Google Scholar] [CrossRef]
- Khuswendi, T.; Hindersah, H.; Adiprawita, W. UAV Path Planning Using Potential Field and Modified Receding Horizon A*3D Algorithm. In Proceedings of the 2011 International Conference on Electrical Engineering and Informatics (ICEEI, 2011), Bandung, Indonesia, 17–19 July 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Miura, J. Support vector path planning. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2894–2899. [Google Scholar] [CrossRef]
- Park, J.; Karumanchi, S.; Iagnemma, K. Homotopy-Based Divide-and-Conquer Strategy for Optimal Trajectory Planning via Mixed-Integer Programming. IEEE Trans. Robot. 2015, 31, 1101–1115. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Fast Genetic Algorithm Path Planner for Fixed-Wing Military UAV Using GPU. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2105–2117. [Google Scholar] [CrossRef]
- Gautam, S.A.; Verma, N. Path Planning for Unmanned Aerial Vehicle Based on Genetic Algorithm and Artificial Neural Network in 3D. In Proceedings of the 2014 International Conference on Data Mining and Intelligent Computing (ICDMIC 2014), New Delhi, India, 5–6 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Li, Y.; Cui, R.X.; Li, Z.J.; Xu, D.M. Neural Network Approximation Based Near-Optimal Motion Planning with Kinodynamic Constraints Using RRT. IEEE Trans. Ind. Electron. 2018, 65, 8718–8729. [Google Scholar] [CrossRef]
- Kim, J.J.; Lee, J.J. Trajectory Optimization with Particle Swarm Optimization for Manipulator Motion Planning. IEEE Trans. Ind. Inform. 2015, 11, 620–631. [Google Scholar] [CrossRef]
- Wu, Z.; Fu, W.; Xue, R.; Wang, W. A Novel Global Path Planning Method for Mobile Robots Based on Teaching-Learning-Based Optimization. Information 2016, 7, 39. [Google Scholar] [CrossRef]
- Colorni, A.; Dorigo, M.; Maniezzo, V. Distributed optimization by ant colonies. In Proceedings of the First European Conference on Artificial Life, Paris, France, 13 December 1991; pp. 134–142. [Google Scholar]
- Yang, J.; Xu, M.; Zhao, W.; Xu, B. A Multipath Routing Protocol Based on Clustering and Ant Colony Optimization for Wireless Sensor Networks. Sensors 2010, 10, 4521–4540. [Google Scholar] [CrossRef] [PubMed]
- Stutzle, T.; Hoos, H. Max-min ant system and local search for the travelling salesman problem. In Proceedings of the 1997 IEEE International Conference on Evolutionary Computation (ICEC ’97), Indianapolis, IN, USA, 13–16 April 1997; pp. 309–314. [Google Scholar]
- Lee, M.G.; Yu, K.M. Dynamic Path Planning Based on an Improved Ant Colony Optimization with Genetic Algorithm. In Proceedings of the 2018 IEEE Asia-Pacific Conference on Antennas and Propagation (APCAP 2018), Auckland, New Zealand, 5–8 August 2018. [Google Scholar] [CrossRef]
- Zhou, Z.; Nie, Y.; Gao, M. Enhanced Ant Colony Optimization Algorithm for Global Path Planning of Mobile Robots. In Proceedings of the 2013 International Conference on Computational and Information Sciences (ICCIS 2013), Shiyan, China, 21–23 June 2013; pp. 698–701. [Google Scholar] [CrossRef]
- Mao, L.; Liu, S.; Yu, J. An improved ant colony algorithm for mobile robot path planning. J. East China Univ. Sci. Technol. 2006, 32, 997–1001. [Google Scholar] [CrossRef]
- Zhao, M.; Dai, Y. Robot Three Dimensional Space Path-planning Applying the Improved Ant Colony Optimization. Indonesian J. Electr. Eng. Comput. Sci. 2015, 14, 304–310. [Google Scholar] [CrossRef]
- Wang, L.; Kan, J.; Guo, J.; Wang, C. Improved Ant Colony Optimization for Ground Robot 3D Path Planning. In Proceedings of the 2018 International Conference on Network-based Distributed Computing and Knowledge Discovery (Cyberc 2018), Zhengzhou, China, 18–20 October 2018. [Google Scholar]
- Zhang, Y.; Niu, X. Simulation Research on Mobile Robot Path Planning Based on Ant Colony Optimization. Comput. Simulat. 2011, 28, 231–234. [Google Scholar]
- Huang, Y.; Yang, C.; Gong, S. Energy Optimization for Train Operation Based on an Improved Ant Colony Optimization Methodology. Energies 2016, 9, 626. [Google Scholar] [CrossRef]
- Gao, R.; Wu, J. Dynamic Load Balancing Strategy for Cloud Computing with Ant Colony Optimization. Future Int. 2015, 7, 465–483. [Google Scholar] [CrossRef]
- Wang, L.; Guo, J.; Wang, Q.; Kan, J. Ground Robot Path Planning based on Simulated Annealing Genetic Algorithm. In Proceedings of the 2018 International Conference on Network-based Distributed Computing and Knowledge Discovery (Cyberc 2018), Zhengzhou, China, 18–20 October 2018. [Google Scholar]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing. Sensors 2017, 17, 1581. [Google Scholar] [CrossRef] [PubMed]
- Dorigo, M.; Stützle, T. Ant Colony Optimization; MIT Press: Cambridge, MA, USA, 2004; ISBN 9780262042192. [Google Scholar]
- Moscato, P.; Norman, M.G. A “Memetic” Approach for the Traveling Salesman Problem Implementation of a Computational Ecology for Combinatorial Optimization on Message-Passing Systems. Parallel Comput. Transp. Appl. 1992, 1, 177–186. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant System Optimization by a Colony of Cooperating Agents. IEEE Trans. Syst. Man Cybernet. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Hoshino, Y.; Peng, C.C. Path Smoothing Techniques in Robot Navigation: State-of-the-Art, Current and Future Challenges. Sensors 2018, 18, 3170. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Environment Modeling | Pheromone Update (Local and Global) | Heuristic Function | Search Pattern | Deadlock-Free Mechanism |
|---|---|---|---|---|---|
| Basic ant colony | 3D grid method (Section 2) | Basic pheromone update (Section 4.1.1) | Introducing safety value calculation (Section 4.2.2) | Plane and visual field (Section 4.3) | 3D deadlock-free mechanism |
| Improved ant colony | 3D grid method (Section 2) | Improved pheromone update (Section 4.1.2) | Introducing safety value calculation (Section 4.2.2) | Plane and visual field (Section 4.3) | 3D deadlock-free mechanism |
| Method | Indexes Compared | First Time | Second Time | Third Time | Fourth Time | Fifth Time | Six Time | Seven Time | Eight Time | Mean Value |
|---|---|---|---|---|---|---|---|---|---|---|
| Basic ant colony algorithm | Shortest path (m) | 52.164 | 52.106 | 50.151 | 50.042 | 50.106 | 49.750 | 50.685 | 52.165 | 50.896 |
| Running time (s) | 110.588 | 106.861 | 108.866 | 83.001 | 109.967 | 110.757 | 111.298 | 103.301 | 105.580 | |
| Improved ant colony algorithm | Shortest path (m) | 47.246 | 47.704 | 45.029 | 46.449 | 47.990 | 47.200 | 46.704 | 47.265 | 46.948 |
| Running time (s) | 102.989 | 103.894 | 102.637 | 100.606 | 106.895 | 102.951 | 104.442 | 111.140 | 104.444 |
| Method | Indexes Compared | First Time | Second Time | Third Time | Fourth Time | Fifth Time | Six Time | Seven Time | Eight Time | Mean Value |
|---|---|---|---|---|---|---|---|---|---|---|
| Basic ant colony algorithm | Shortest path (m) | 49.547 | 49.035 | 47.565 | 52.165 | 52.160 | 48.850 | 50.151 | 50.106 | 49.947 |
| Running time (s) | 104.159 | 106.549 | 104.688 | 107.948 | 82.357 | 106.348 | 106.124 | 104.700 | 102.859 | |
| Improved ant colony algorithm | Shortest path (m) | 46.418 | 46.449 | 46.449 | 46.704 | 45.232 | 46.482 | 46.857 | 46.080 | 46.333 |
| Running Time (s) | 103.878 | 102.094 | 101.990 | 104.737 | 104.391 | 105.057 | 102.881 | 104.836 | 103.733 |
| Environment | Method | Indexes Compared | Situation 1 Average Data | Situation 2 Average Data | Situation 3 Average Data | Situation 4 Average Data | Situation 5 Average Data |
|---|---|---|---|---|---|---|---|
| The second 3D terrain | Basic ant colony algorithm | Shortest path (m) | 49.9474 | 57.3438 | 61.4708 | 65.4551 | 63.6704 |
| Running time (s) | 102.8592 | 109.9902 | 116.9173 | 95.7429 | 118.8622 | ||
| Improved ant colony algorithm | Shortest path (m) | 46.3339 | 51.0887 | 55.3903 | 62.5872 | 58.311 | |
| Running time (s) | 103.7331 | 107.7909 | 113.3931 | 93.8504 | 115.476 |
| Introduced Safety Values | Index | Situation 1 Average Data | Situation 2 Average Data | Situation 3 Average Data | Situation 4 Average Data | Situation 5 Average Data |
|---|---|---|---|---|---|---|
| The first method: safety values calculation in the path planning stage | Running time (s) | 1232.3486 | 1221.2706 | 1313.0922 | 1150.6062 | 1411.1165 |
| The second method: safety values calculation in the environment modeling stage | Running time (s) | 103.7331 | 107.7909 | 113.3931 | 93.8504 | 115.4760 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Kan, J.; Guo, J.; Wang, C. 3D Path Planning for the Ground Robot with Improved Ant Colony Optimization. Sensors 2019, 19, 815. https://doi.org/10.3390/s19040815
Wang L, Kan J, Guo J, Wang C. 3D Path Planning for the Ground Robot with Improved Ant Colony Optimization. Sensors. 2019; 19(4):815. https://doi.org/10.3390/s19040815
Chicago/Turabian StyleWang, Lanfei, Jiangming Kan, Jun Guo, and Chao Wang. 2019. "3D Path Planning for the Ground Robot with Improved Ant Colony Optimization" Sensors 19, no. 4: 815. https://doi.org/10.3390/s19040815
APA StyleWang, L., Kan, J., Guo, J., & Wang, C. (2019). 3D Path Planning for the Ground Robot with Improved Ant Colony Optimization. Sensors, 19(4), 815. https://doi.org/10.3390/s19040815