Artificial Landmarks for Trusted Localization of Autonomous Vehicles Based on Magnetic Sensors


Abstract
1. Introduction
2. Architecture
2.1. Transducer Electronic Data Sheet (TEDS)
2.2. Software Architecture
2.3. Hardware Architecture
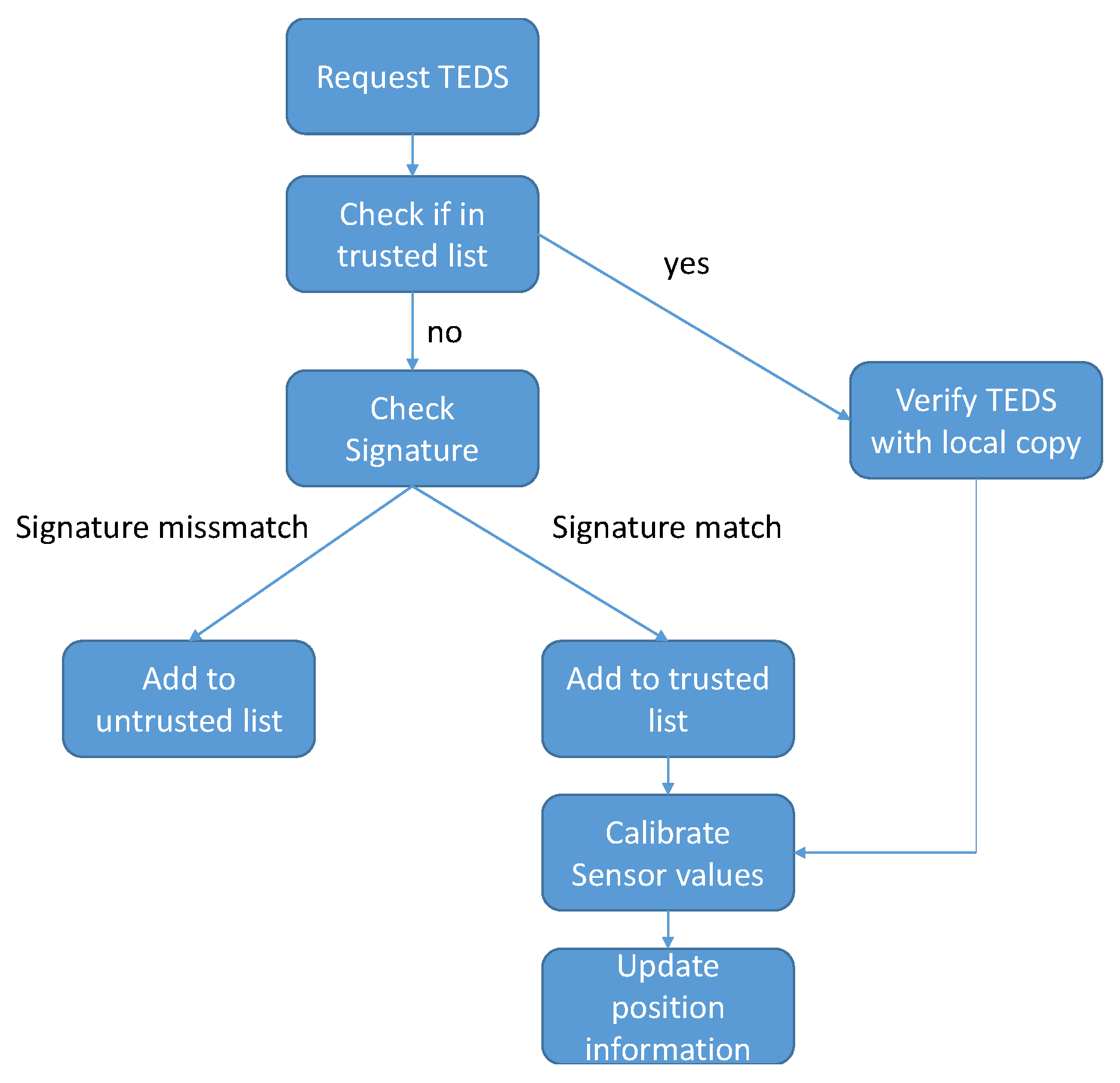
3. Electronic Data Sheet Approach
4. Landmark Validation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Weiss, S.; Achtelik, M.W.; Lynen, S.; Chli, M.; Siegwart, R. Real-time onboard visual-inertial state estimation and self-calibration of MAVs in unknown environments. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 957–964. [Google Scholar] [CrossRef]
- Huang, Z.; Zhu, J.; Yang, L.; Xue, B.; Wu, J.; Zhao, Z. Accurate 3-D position and orientation method for indoor mobile robot navigation based on photoelectric scanning. IEEE Trans. Instrum. Meas. 2015, 64, 2518–2529. [Google Scholar] [CrossRef]
- IEEE Standard for a Smart Transducer Interface for Sensors and Actuators—Common Functions, Communication Protocols, and Transducer Electronic Data Sheet (TEDS) Formats; IEEE Std 1451.0-2007; IEEE: New York, NY, USA, 2007; pp. 1–335. [CrossRef]
- Nazemzadeh, P.; Fontanelli, D.; Macii, D.; Palopoli, L. Indoor localization of mobile robots through qr code detection and dead reckoning data fusion. IEEE/ASME Trans. Mechatron. 2017, 22, 2588–2599. [Google Scholar] [CrossRef]
- Salahuddin, M.A.; Al-Fuqaha, A.; Gavirangaswamy, V.B.; Ljucovic, M.; Anan, M. An efficient artificial landmark-based system for indoor and outdoor identification and localization. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011. [Google Scholar] [CrossRef]
- Lee, J.Y.; Yu, W. Robust self-localization of ground vehicles using artificial landmark. In Proceedings of the 2014 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Kuala Lumpur, Malaysia, 12–15 November 2014. [Google Scholar] [CrossRef]
- Seong, J.; Kim, J.; Chung, W. Mobile robot localization using indistinguishable artificial landmarks. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 30 October–2 November 2013. [Google Scholar] [CrossRef]
- Norman, J.; Joseph, P. Secure neighbour authentication in wireless sensor networks. In Proceedings of the 2011 2nd International Conference on Wireless Communication, Vehicular Technology, Information Theory and Aerospace & Electronic Systems Technology (Wireless VITAE), Chennai, India, 28 February–3 March 2011. [Google Scholar] [CrossRef]
- Abduvaliev, A.; Lee, S.; Lee, Y.K. Simple hash based message authentication scheme for wireless sensor networks. In Proceedings of the 2009 9th International Symposium on Communications and Information Technology, Icheon, Korea, 28–30 September 2009. [Google Scholar] [CrossRef]
- Perrig, A.; Stankovic, J.; Wagner, D. Security in wireless sensor networks. Commun. ACM 2004, 47, 53–57. [Google Scholar] [CrossRef]
- Watro, R.; Kontg, D.; Cuti, S.F.; Gardiner, C.; Lynn, C.; Kruus, P. TinyPK: Securing sensor networks with public key technology. In Proceedings of the 2nd ACM Workshop on Security of Ad Hoc and Sensor Networks, Washington, DC, USA, 25 October 2004; pp. 59–64. [Google Scholar] [CrossRef]
- Yu, T.; Shen, Y. Asymptotic performance analysis for landmark learning in indoor localization. IEEE Commun. Lett. 2018, 22, 740–743. [Google Scholar] [CrossRef]
- Song, S.; Li, B.; Qiao, W.; Hu, C.; Ren, H.; Yu, H.; Zhang, Q.; Meng, M.Q.H.; Xu, G. 6-D magnetic localization and orientation method for an annular magnet based on a closed-form analytical model. IEEE Trans. Magn. 2014, 50, 1–11. [Google Scholar] [CrossRef]
- Gietler, H.; Böhm, C.; Mitterer, T.; Faller, L.M.; Weiss, S.; Zangl, H. 4-DOF magnetic field based localization for uav navigation. In Proceedings of the 2018 International Symposium on Experimental Robotics, Buenos Aires, Argentina, 5–8 November 2018. [Google Scholar]
- Faller, L.M.; Mitterer, T.; Leitzke, J.P.; Zangl, H. Design and evaluation of a fast, high-resolution sensor evaluation platform applied to mems position sensing. IEEE Trans. Instrum. Meas. 2018, 67, 1014–1027. [Google Scholar] [CrossRef]
- Lynen, S.; Achtelik, M.W.; Weiss, S.; Chli, M.; Siegwart, R. A robust and modular multi-sensor fusion approach applied to MAV navigation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3923–3929. [Google Scholar] [CrossRef]
- Woodman, O.J. An Introduction to Inertial Navigation; Technical Report; University of Cambridge Computer Laboratory: Cambridge, UK, 2007. [Google Scholar]
- OGC. OGC SensorML: Model and XML Encoding Standard; Open Geospatial Consortium: Wayland, MA, USA, 2014; Available online: https://www.opengeospatial.org/standards/sensorml (accessed on 15 February 2019).
- IEC. Function Blocks (FB) for Process Control and Electronic Device Description Language (EDDL); International Electrotechnical Commission: Geneva, Switzerland, 2015. [Google Scholar]
- OGC. Semantic Sensor Network Ontology; Open Geospatial Consortium: Wayland, MA, USA, 2017. [Google Scholar]
- Wolfram, S. An Elementary Introduction to the Wolfram Language, 2nd ed.; Wolfram Media, Inc.: Champaign, IL, USA, 2017. [Google Scholar]
- CiA. Electronic Data Sheet Specification for CANopen; CAN in Automation: Nuremberg, Germany, 2005.
- FIPS. Digital Signature Standard (DSS); National Institute of Standards and Technology: Gaithersburg, MD, USA, 1994.
- ElGamal, T. A public key cryptosystem and a signature scheme based on discrete logarithms. IEEE Trans. Inf. Theory 1985, 31, 469–472. [Google Scholar] [CrossRef]
- Liu, Z.; Seo, H.G.J.K.H. Efficientimplementation of nist-compliant elliptic curve cryptography for 8-bit avr-based sensor nodes. IEEE Trans. Inf. Forensics Secur. 2016, 11, 1385–1397. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bit# | Field | Description | Type | #Octets |
|---|---|---|---|---|
| - | Length | UInt32 | 4 | |
| 0–2 | - | Reserved | - | - |
| 3 | TEDSID | TEDS identification header | UInt8 | 4 |
| 4 | LastModified | Date when Signature was last changed | TimeInstance | 8 |
| 5 | Signature | Signature calculated over TEDS | UInt8 | NOTE 1 |
| 6 | OwnerPK | Public key of Landmark owner | UInt8 | NOTE 2 |
| 7 | SignaturePK | Signature calculated over Public key | UInt8 | NOTE 2 |
| 8 | UsedEncAlg | Encryption Algorithm used | UInt8 | 1 |
| 9 | UsedHashAlg | Hashing Algorithm used | UInt8 | 1 |
| - | Checksum | UInt16 | 4 | |
| NOTE 1—depends on length of TEDS | ||||
| NOTE 2—depends on the used algorithms | ||||
| Bit# | Algorithm | Description |
|---|---|---|
| 0 | RSA | Rivest, Shamir and Adleman |
| 1 | DSA | Digital Signature Algorithm |
| 2 | ECDSA | Elliptic Curve Digital Signature Algorithm |
| 3 | ElGamal | ElGamal Signature Scheme |
| 4–128 | Manufacturer reserved | |
| 129–255 | Reserved |
| Bit# | Algorithm | Description |
|---|---|---|
| 0 | MD5 | Message Digest Algorithm 5 |
| 1 | SHA-256 | Secure Hash Algorithm 2-256 |
| 2 | SHA-512 | Secure Hash Algorithm 2-512 |
| 3–128 | Manufacturer reserved | |
| 129–255 | Reserved |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitterer, T.; Gietler, H.; Faller, L.-M.; Zangl, H. Artificial Landmarks for Trusted Localization of Autonomous Vehicles Based on Magnetic Sensors. Sensors 2019, 19, 813. https://doi.org/10.3390/s19040813
Mitterer T, Gietler H, Faller L-M, Zangl H. Artificial Landmarks for Trusted Localization of Autonomous Vehicles Based on Magnetic Sensors. Sensors. 2019; 19(4):813. https://doi.org/10.3390/s19040813
Chicago/Turabian StyleMitterer, Tobias, Harald Gietler, Lisa-Marie Faller, and Hubert Zangl. 2019. "Artificial Landmarks for Trusted Localization of Autonomous Vehicles Based on Magnetic Sensors" Sensors 19, no. 4: 813. https://doi.org/10.3390/s19040813
APA StyleMitterer, T., Gietler, H., Faller, L.-M., & Zangl, H. (2019). Artificial Landmarks for Trusted Localization of Autonomous Vehicles Based on Magnetic Sensors. Sensors, 19(4), 813. https://doi.org/10.3390/s19040813