Evaluation of Inertial Sensor-Based Pre-Impact Fall Detection Algorithms Using Public Dataset

Abstract
:1. Introduction
2. Materials and Methods
2.1. Subjects
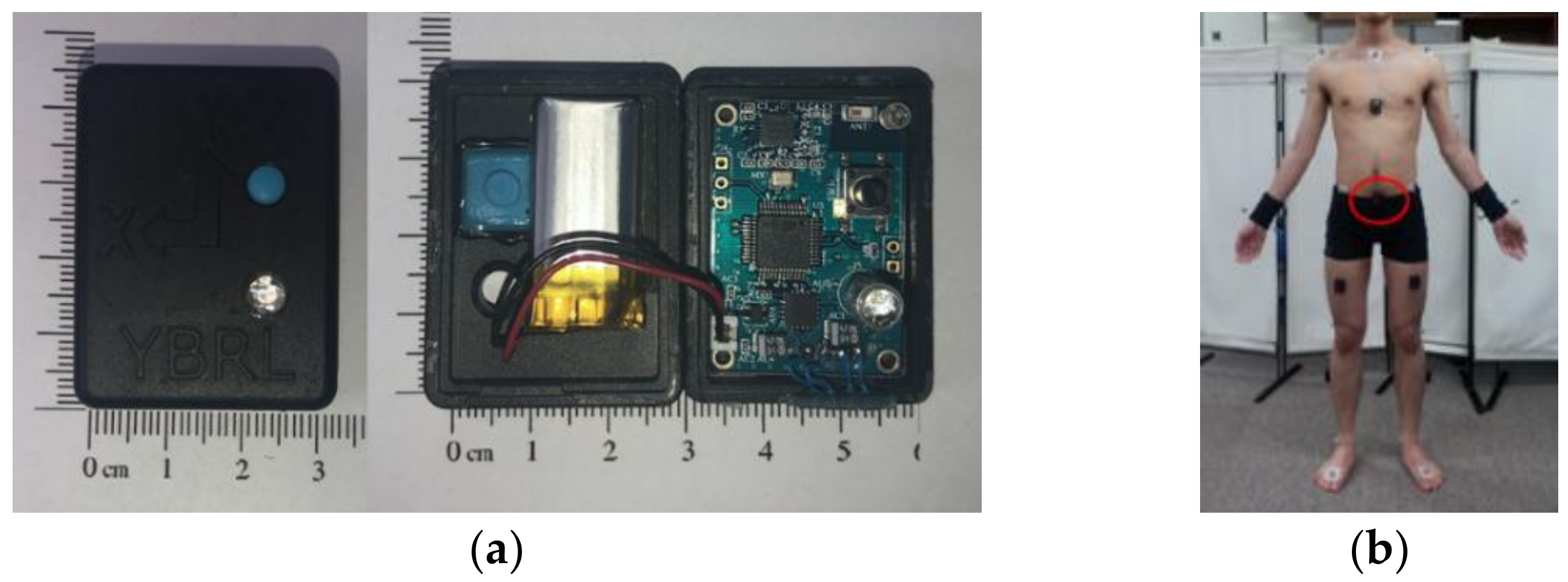
2.2. Equipment
2.3. Experimental Procedures
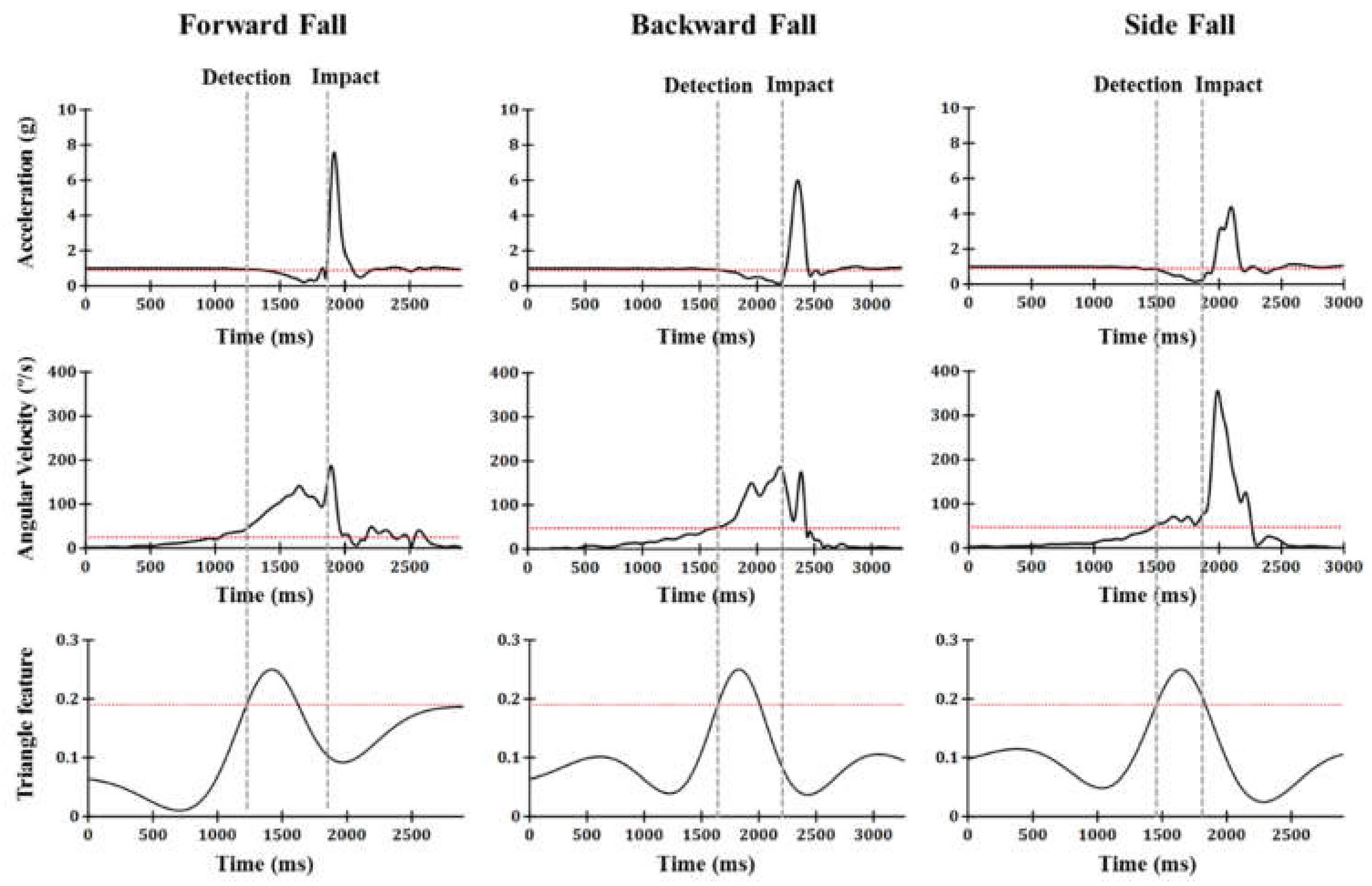
2.4. Data Analysis
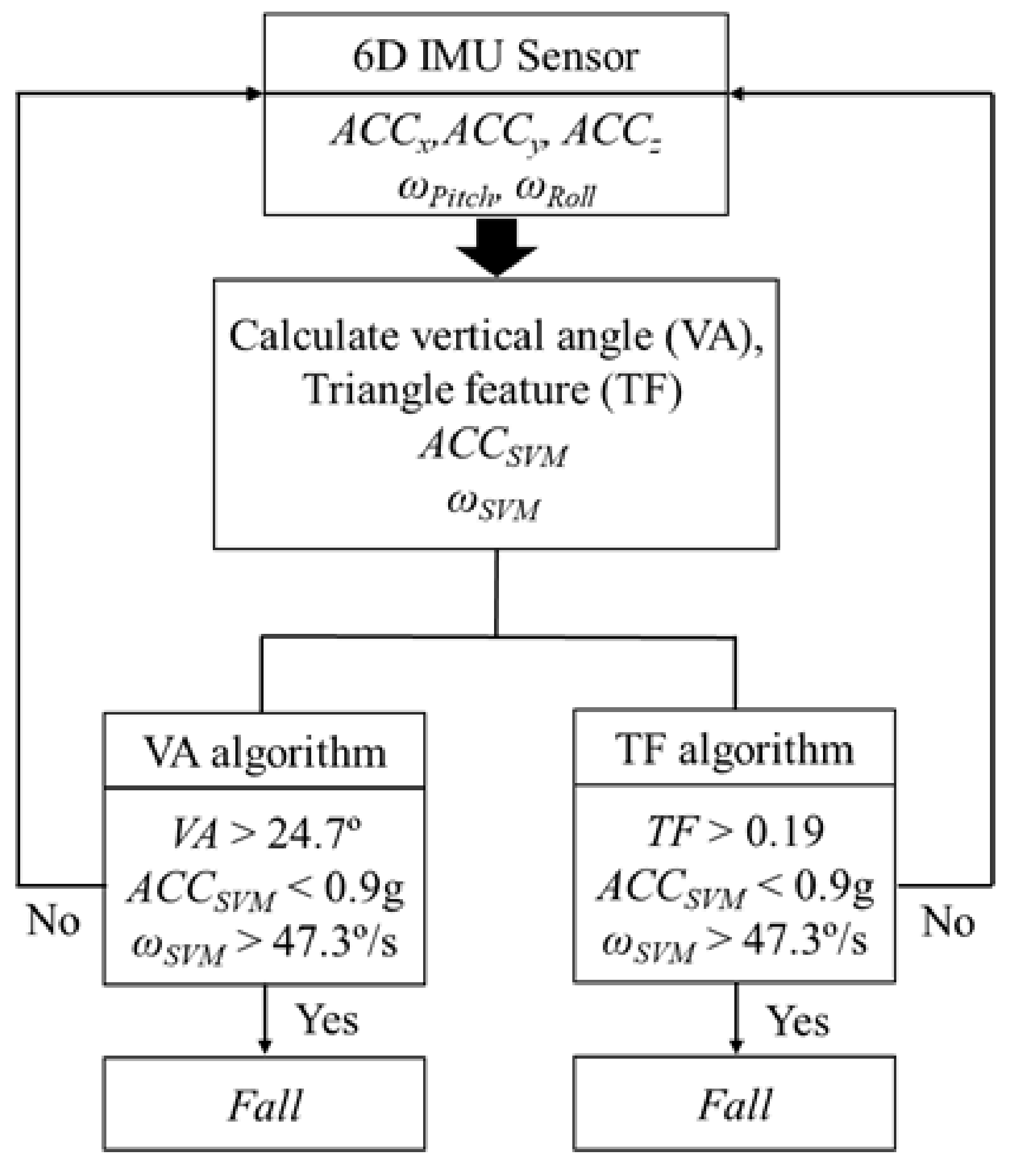
2.5. Pre-Impact Fall Detection Algorithm
2.6. Algorithm Evaluation Using Public Dataset
3. Results
3.1. Sensitivity and Specificity
3.2. Lead Time
3.3. Comparison with Other Studies
4. Discussion
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Kenny, R.A.; O’Shea, D.; Walker, H.F. Impact of a dedicated syncope and falls facility for older adults on emergency beds. Age Ageing 2002, 31, 272–275. [Google Scholar] [CrossRef] [PubMed]
- Coppard, M.J.S.G.; Robert, O.A.; Thomas, E.K.; Larry, C. The prevention of falls in later life. A report of the Kellogg International work group on the prevention of falls by the elderly. Dan. Med. Bull. 1987, 4, 1–24. [Google Scholar]
- Rubenstein, L.Z. Falls in older people: Epidemiology, risk factors and strategies for prevention. Age Ageing 2006, 35, 37–41. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization (WHO). Available online: http://www.who.int/mediacentre/factsheets/fs344/en/ (accessed on 12 September 2017).
- Podsiadlo, D.; Richardson, S. The timed “up & go”: A test of basic functional mobility for frail elderly persons. J. Am. Geriatr. Soc. 1991, 39, 142–148. [Google Scholar] [PubMed]
- Bogle Thorbahn, L.D.; Newton, R.A. Use of the Berg balance test to predict falls in elderly persons. J. Am. Phys. Ther. Assoc. 1996, 76, 576–583. [Google Scholar] [CrossRef]
- Tinetti, M.E. Performance-oriented assessment of mobility problems in elderly patients. J. Am. Geriatr. Soc. 1986, 34, 119–126. [Google Scholar] [CrossRef] [PubMed]
- Van den Kroonenberg, A.J.; Hayes, W.C.; McMahon, T.A. Hip impact velocities and body configurations for voluntary falls from standing height. J. Biomech. 1996, 29, 807–811. [Google Scholar] [CrossRef]
- Smeesters, C.; Hayes, W.C.; McMahon, T.A. Disturbance type and gait speed affect fall direction and impact location. J. Biomech. 2001, 34, 309–317. [Google Scholar] [CrossRef]
- Yamamoto, S.; Tanaka, E.; Ikeda, T.; Kubouchi, Y.; Harada, A.; Okuizumi, H. Mechanical simulation for hip fracture by a fall using multibody-FE hybrid human model. J. Biomech. 2006, 39, S89–S90. [Google Scholar] [CrossRef]
- Robinovitch, S.N.; Brumer, R.; Maurer, J. Effect of the “squat protective response” on impact velocity during backward falls. J. Biomech. 2004, 37, 1329–1337. [Google Scholar] [CrossRef]
- Koike, T.Y.; Orito, H.; Toyoda, M.; Tada, R.; Sugama, M.; Hoshino, Y. External hip protectors are effective for the elderly with higher-than-average risk factors for hip fractures. Osteoporos. Int. 2009, 20, 1613–1620. [Google Scholar] [CrossRef] [PubMed]
- Laing, A.C.; Feldman, F.; Jalili, M.; Tsai, C.M.; Robinovitch, S.N. The effects of pad geometry and material properties on the biomechanical effectiveness of 26 commercially available hip protectors. J. Biomech. 2011, 44, 2627–2635. [Google Scholar] [CrossRef]
- Bourke, A.K.; van de Ven, P.; Gamble, M.; O’Connor, R.; Murphy, K.; Bogan, E.; McQuade, E.; Finucane, P.; Olaighin, G.; Nelson, J. Evaluation of waist-mounted tri-axial accelerometer based fall-detection algorithms during scripted and continuous unscripted activities. J. Biomech. 2010, 43, 3051–3057. [Google Scholar] [CrossRef] [PubMed]
- Bourke, A.K.; O’Donovan, K.J.; Olaighin, G. The identification of vertical velocity profiles using an inertial sensor to investigate pre-impact detection of falls. Med. Eng. Phys. 2008, 30, 937–946. [Google Scholar] [CrossRef] [PubMed]
- Wu, G. Distinguishing fall activities from normal activities by velocity characteristics. J. Biomech. 2008, 33, 1497–1500. [Google Scholar] [CrossRef]
- Wu, G.; Xue, S. Portable preimpact fall detector with inertial sensors. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 178–183. [Google Scholar] [PubMed]
- Nyan, M.N.; Tay, F.E.; Murugasu, E. A wearable system for pre-Impact fall detection. J. Biomech. 2008, 41, 3475–3481. [Google Scholar] [CrossRef]
- Ganti, R.K.; Jayachandran, P.; Abdelzaher, T.F.; Stankovic, J.A. Satire: A Software Architecture for Smart Attire. In Proceedings of the 4th International Conference on Mobile Systems, Applications, and Services (MobiSys 2006), Uppsala, Sweden, 19–22 June 2006; pp. 110–123. [Google Scholar]
- Zhang, T.; Wang, J.; Xu, L.; Liu, P. Fall detection by wearable sensor and one-class SVM algorithm. Intell. Comput. Signal Process. Pattern Recognit. 2006, 345, 858–863. [Google Scholar]
- Bagala, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS ONE 2012, 7, e37062. [Google Scholar] [CrossRef]
- Pannurat, N.; Thiemjarus, S.; Nantajeewarawat, E. Automatic fall monitoring: A review. Sensors 2014, 14, 12900–12936. [Google Scholar] [CrossRef]
- O’Neill, T.W.; Varlow, J.; Silman, A.J.; Reeve, J.; Reid, D.M.; Todd, C.; Woolf, A.D. Age and sex influences on fall characteristics. Ann. Rheum. Dis. 1994, 53, 773–775. [Google Scholar] [CrossRef]
- Lord, S.R.; Ward, J.A.; Williams, P.; Anstey, K.J. An epidemiological study of falls in older community-dwelling women: The Randwick falls and fractures study. Aust. J. Public Health 2010, 17, 240–245. [Google Scholar] [CrossRef]
- Vavoulas, G.; Pediaditis, M.; Chatzaki, C.; Spanakis, E.G.; Tsiknakis, M. The mobifall dataset. Int. J. Monit. Surveill. Technol. Res. 2014, 2, 44–56. [Google Scholar] [CrossRef]
- Medrano, C.; Igual, R.; Plaza, I.; Castro, M. Detecting falls as novelties in acceleration patterns acquired with smartphones. PLoS ONE 2014, 9, e94811. [Google Scholar] [CrossRef] [PubMed]
- Frank, K.; Nadales, M.J.V.; Robertson, P.; Pfeifer, T. Bayesian Recognition of Motion Related Activities with Inertial Sensors. In Proceedings of the 12th ACM International Conference Adjunct Papers on Ubiquitous Computing (Ubicomp’10), Copenhagen, Denmark, 26–29 September 2010; pp. 445–446. [Google Scholar]
- Vilarinho, T.; Farshchian, B.; Bajer, D.G.; Dahl, O.H.; Egge, I.; Hegdal, S.S.; Lønes, A.; Slettevold, J.N.; Weggersen, S.M. A Combined Smartphone and Smartwatch Fall Detection System. In Proceedings of the 2015 IEEE International Conference on Computer and Information Technology; Ubiquitous Computing and Communications; Dependable, Autonomic and Secure Computing; Pervasive Intelligence and Computing, Liverpool, UK, 26–28 October 2015; pp. 1443–1448. [Google Scholar]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. Sisfall: A fall and movement dataset. Sensors 2017, 17, 198. [Google Scholar] [CrossRef] [PubMed]
- Ahn, S.; Choi, D.; Kim, J.; Kim, S.; Jeong, Y.; Jo, M.; Kim, Y. Optimization of a pre-impact fall detection algorithm and development of hip protection airbag system. Sens. Mater. 2018, 30, 1743–1752. [Google Scholar] [CrossRef]
- Tamura, T.; Yoshimura, T.; Sekine, M.; Uchida, M.; Tanaka, O. A wearable airbag to prevent fall injuries. IEEE Trans. Inf. Technol. Biomed. 2009, 13, 910–914. [Google Scholar] [CrossRef]
- Davidson, M. System for Protection from Falls. U.S. Patent 2004/0003455 A1, 8 January 2004. [Google Scholar]
- Lockhart, T. Fall-Sensing Systems, Hip Protector Systems, and Other Protective Systems. U.S. Patent 2006/004995.0 A1, 9 March 2006. [Google Scholar]
- Thelen, D.G.; Wojcik, L.A.; Schultz, A.B.; Ashton-Miller, J.A.; Alexander, N.B. Age differences in using a rapid step to regain balance during a forward fall. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 1997, 52, M8–M13. [Google Scholar] [CrossRef]
- Doherty, T.J. Invited review: Aging and sarcopenia. J. Appl. Physiol. 1985, 95, 1717–1727. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activity | Description | |
|---|---|---|
| ADLs | Sit-to-stand | Standing up slowly from the stool |
| Walking | Walking straight along the line of the floor | |
| Stand-to-sit | Slowly sitting in a stool | |
| Sit-to-lie | Sitting at the end of the mattress, then laying down in a natural motion | |
| Jumping | Jumping to the maximum height in place | |
| Running | Running straight along the line of the floor | |
| Falls | Forward fall | Fainting fall in the forward direction |
| Backward fall | Fainting fall in the backward direction | |
| Side fall | Fainting fall in the lateral direction | |
| Twist fall | Rotating about the vertical axis during the backward fall |
| Code | Activity | Trials | Duration (s) |
|---|---|---|---|
| F01 | Fall forward while walking caused by a slip | 5 | 15 |
| F02 | Fall backward while walking caused by a slip | 5 | 15 |
| F03 | Lateral fall while walking caused by a slip | 5 | 15 |
| F04 | Fall forward while walking caused by a trip | 5 | 15 |
| F05 | Fall forward while jogging caused by a trip | 5 | 15 |
| F06 | Vertical fall while walking caused by fainting | 5 | 15 |
| F07 | Fall while walking, with use of hands in a table to dampen fall, caused by fainting | 5 | 15 |
| F08 | Fall forward when trying to get up | 5 | 15 |
| F09 | Lateral fall when trying to get up | 5 | 15 |
| F10 | Fall forward when trying to sit down | 5 | 15 |
| F11 | Fall backward when trying to sit down | 5 | 15 |
| F12 | Lateral fall when trying to sit down | 5 | 15 |
| F13 | Fall forward while sitting, caused by fainting or falling asleep | 5 | 15 |
| F14 | Fall backward while sitting, caused by fainting or falling asleep | 5 | 15 |
| F15 | Lateral fall while sitting, caused by fainting or falling asleep | 5 | 15 |
| Code | Activity | Trials | Duration (s) |
|---|---|---|---|
| D01 | Walking slowly | 1 | 100 |
| D02 | Walking quickly | 1 | 100 |
| D03 | Jogging slowly | 1 | 100 |
| D04 | Jogging quickly | 1 | 100 |
| D05 | Walking upstairs and downstairs slowly | 5 | 25 |
| D06 | Walking upstairs and downstairs quickly | 5 | 25 |
| D07 | Slowly sit in a half height chair, wait a moment, and up slowly | 5 | 12 |
| D08 | Quickly sit in a half height chair, wait a moment, and up quickly | 5 | 12 |
| D09 | Slowly sit in a low height chair, wait a moment, and up slowly | 5 | 12 |
| D10 | Quickly sit in a low height chair, wait a moment, and up quickly | 5 | 12 |
| D11 | Sitting a moment, trying to get up, and collapse into a chair | 5 | 12 |
| D12 | Sitting a moment, lying slowly, wait a moment, and sit again | 5 | 12 |
| D13 | Sitting a moment, lying quickly, wait a moment, and sit again | 5 | 12 |
| D14 | Being on one’s back change to lateral position, wait a moment, and change to one’s back | 5 | 12 |
| D15 | Standing, slowly bending at knees, and getting up | 5 | 12 |
| D16 | Standing, slowly bending without bending knees, and getting up D17 | 5 | 12 |
| D17 | Standing, get into a car, remain seated and get out of the car | 5 | 25 |
| D18 | Stumble while walking | 5 | 12 |
| D19 | Gently jump without falling (trying to reach a high object) | 5 | 12 |
| Code | VA Algorithm | TF Algorithm | ||
|---|---|---|---|---|
| Young | Elderly | Young | Elderly | |
| D01−D05 | 0/23 | 0/15 | 0/23 | 0/15 |
| D05, D07, D11, D14−D16 | 0/115 | 0/75 | 0/115 | 0/75 |
| D06, D18, D19 | 0/115 | 0/5 | 0/115 | 0/5 |
| D08 | 32/115 | 13/75 | 0/115 | 0/75 |
| D09 | 28/115 | 17/75 | 0/115 | 0/75 |
| D10 | 115/115 | 75/75 | 115/115 | 75/75 |
| D12 | 27/115 | 21/75 | 0/115 | 0/75 |
| D13 | 115/115 | 5/5 | 115/115 | 5/5 |
| D17 | 115/115 | 29/75 | 115/115 | 12/75 |
| Type of Fall | VA Algorithm (ms) | TF Algorithm (ms) |
|---|---|---|
| Forward Fall | 403 ± 32.7 | 423 ± 22.8 |
| Side Fall | 422 ± 42.3 | 422 ± 31.8 |
| Backward Fall | 423 ± 33.1 | 442 ± 47.4 |
| Twist Fall | 381 ± 19.0 | 397 ± 27.8 |
| Mean ± SD | 401 ± 46.9 | 427 ± 45.9 |
| Wu [17] | Tamura et al. [31] | Bourke et al. [15] | This Study | ||
|---|---|---|---|---|---|
| VA Algorithm | TF Algorithm | ||||
| Accuracy (%) | 80.5 | 81.8 | 87.2 | 86.9 | 90.3 |
| Sensitivity (%) | 100 | 93 | 100 | 100 | 100 |
| Specificity (%) | 67.6 | 74.4 | 78.7 | 78.3 | 83.9 |
| Feature | Acceleration | Acceleration Angular velocity | Vertical velocity | Acceleration Angular velocity Vertical angle | Acceleration Angular velocity Triangle feature |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahn, S.; Kim, J.; Koo, B.; Kim, Y. Evaluation of Inertial Sensor-Based Pre-Impact Fall Detection Algorithms Using Public Dataset. Sensors 2019, 19, 774. https://doi.org/10.3390/s19040774
Ahn S, Kim J, Koo B, Kim Y. Evaluation of Inertial Sensor-Based Pre-Impact Fall Detection Algorithms Using Public Dataset. Sensors. 2019; 19(4):774. https://doi.org/10.3390/s19040774
Chicago/Turabian StyleAhn, Soonjae, Jongman Kim, Bummo Koo, and Youngho Kim. 2019. "Evaluation of Inertial Sensor-Based Pre-Impact Fall Detection Algorithms Using Public Dataset" Sensors 19, no. 4: 774. https://doi.org/10.3390/s19040774
APA StyleAhn, S., Kim, J., Koo, B., & Kim, Y. (2019). Evaluation of Inertial Sensor-Based Pre-Impact Fall Detection Algorithms Using Public Dataset. Sensors, 19(4), 774. https://doi.org/10.3390/s19040774