Application of Fuzzy Logic for Selection of Actor Nodes in WSANs —Implementation of Two Fuzzy-Based Systems and a Testbed †

 ,
,  ,
,
Abstract
1. Introduction
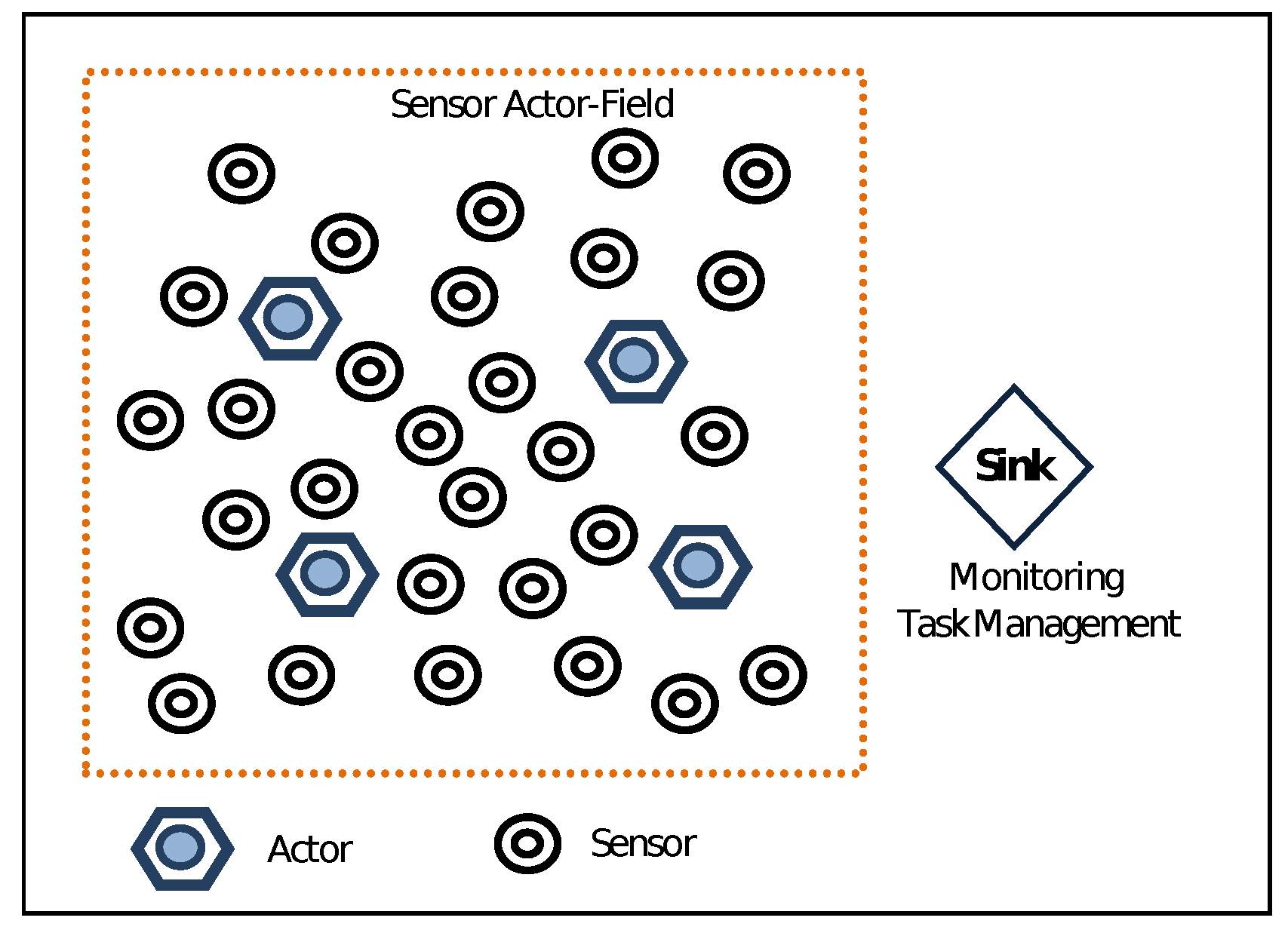
2. WSANs
2.1. WSANs Challenges
- Actor and Sensor Placement: To avoid isolated islands being created and coverage only of secluded areas, a uniform deployment of sensors and actors is a major concern as the performance of the networks depends on it. By having a better spatially distributed network, we make better use of the collected data [19,20].
- Real-Time: WSANs are a distributed control system that requires a real-time reaction for the information gathered by the sensors. In case of an emergency situation the real-time response is crucial to guarantee immediate action [21].
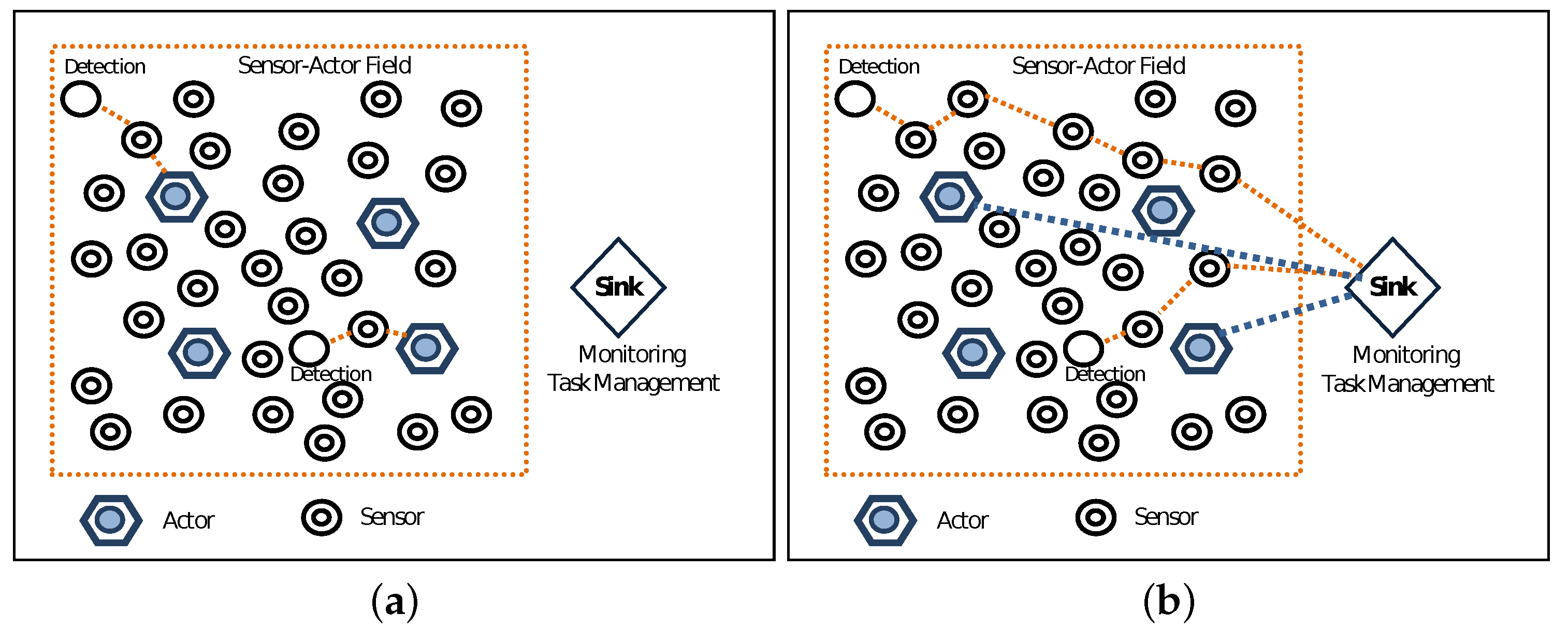
- Coordination: Unlike WSNs, where the sink performs the functions of the gathered data, a new phenomena occurs in WSANs called sensor–actor and actor–actor coordination. This phenomenon provides the transmission of the event features from sensors to actors [22].
- Energy Efficiency: Each task, based on the difficulty, consumes power and drains the battery of the sensors. In order to increase the lifetime of the network, we should consider the energy of the sensors since they are power-constrained devices.
2.2. WSAN Architecture
3. Proposed Fuzzy-Based Systems
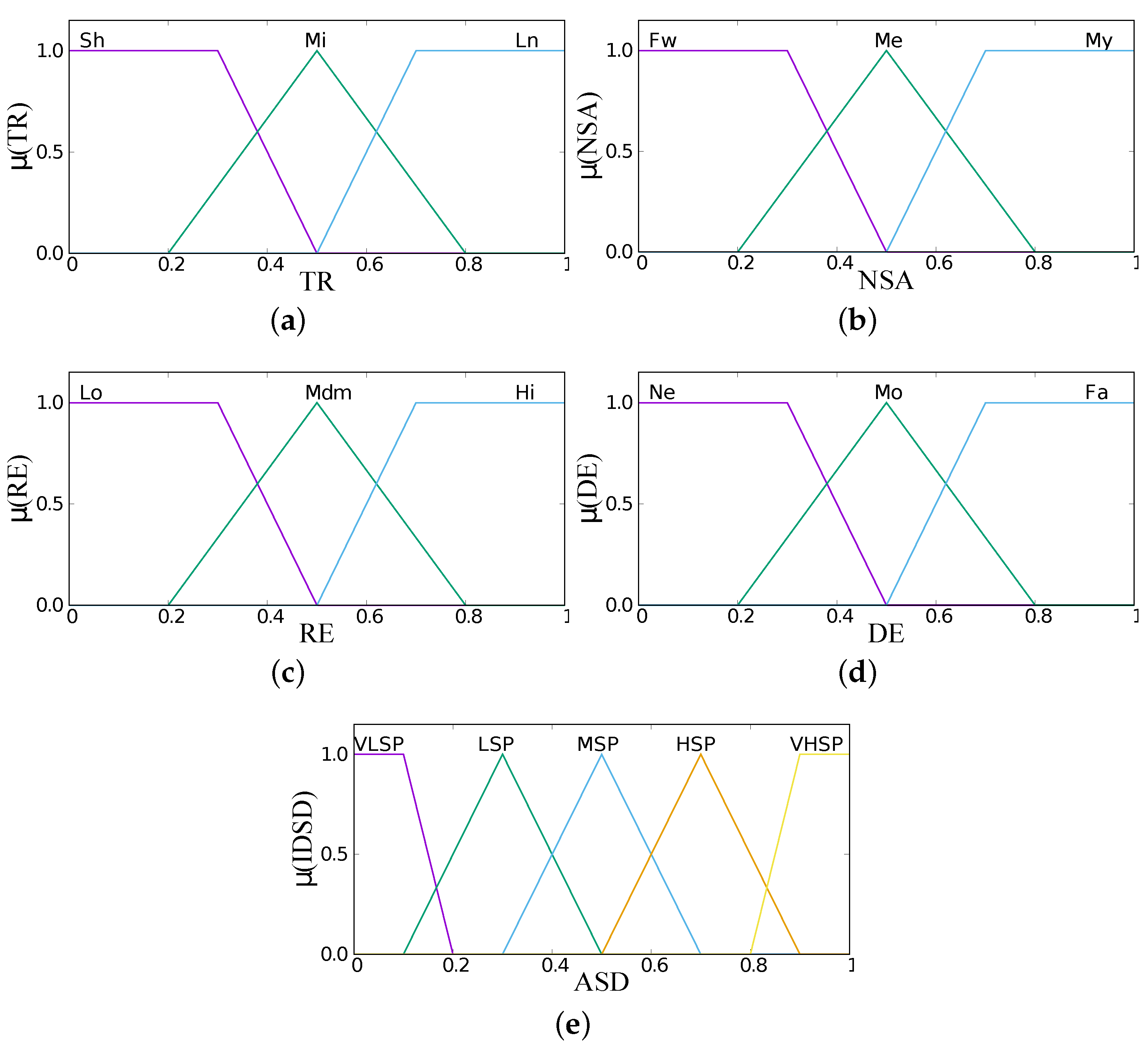
3.1. System Parameters
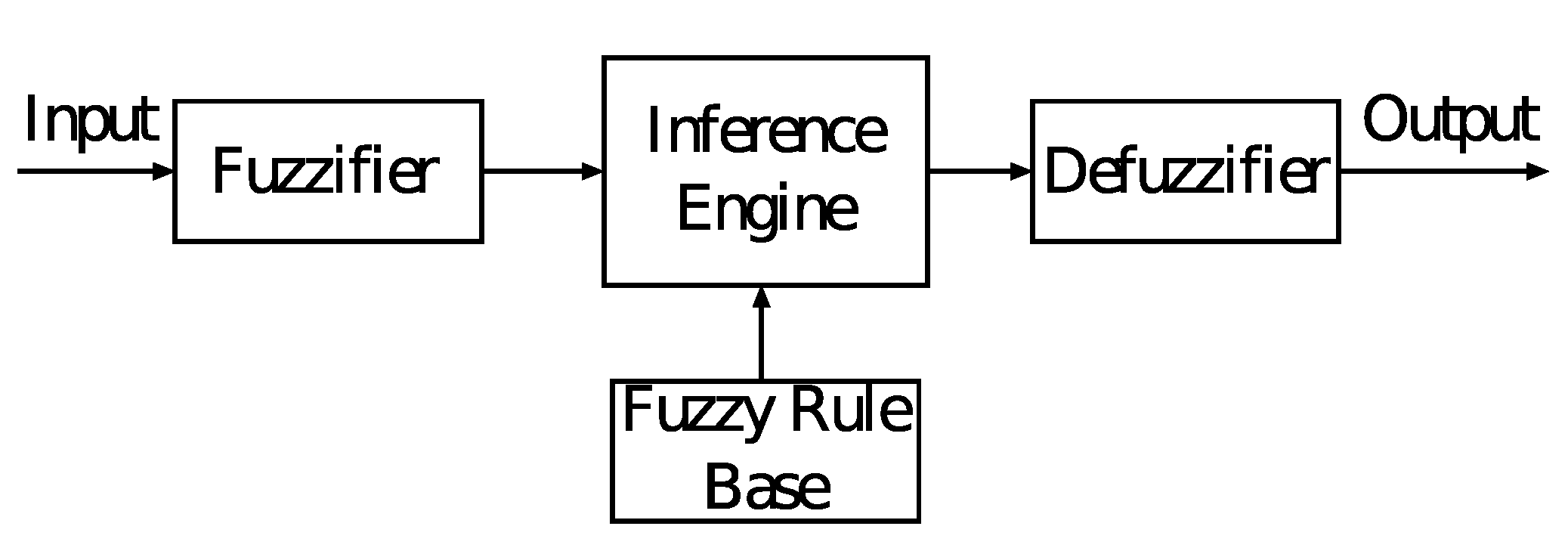
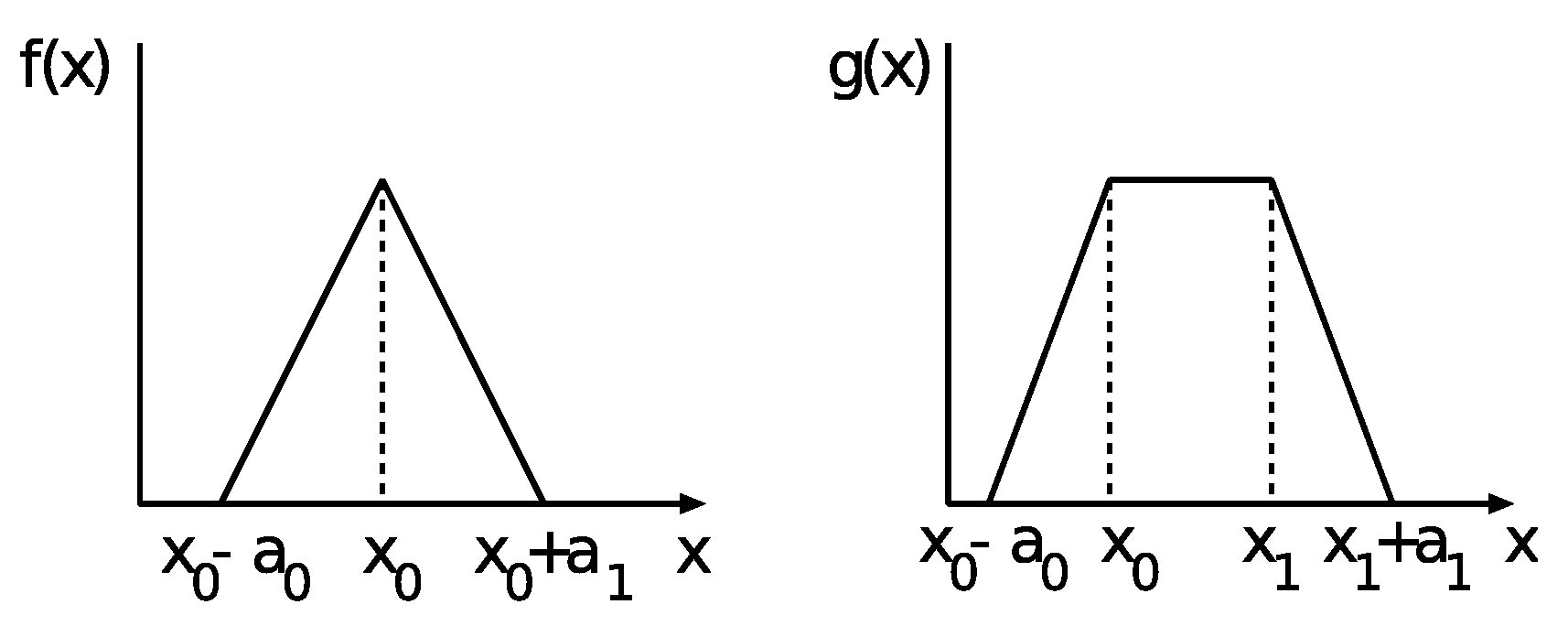
3.2. Implementation of Fuzzy Logic
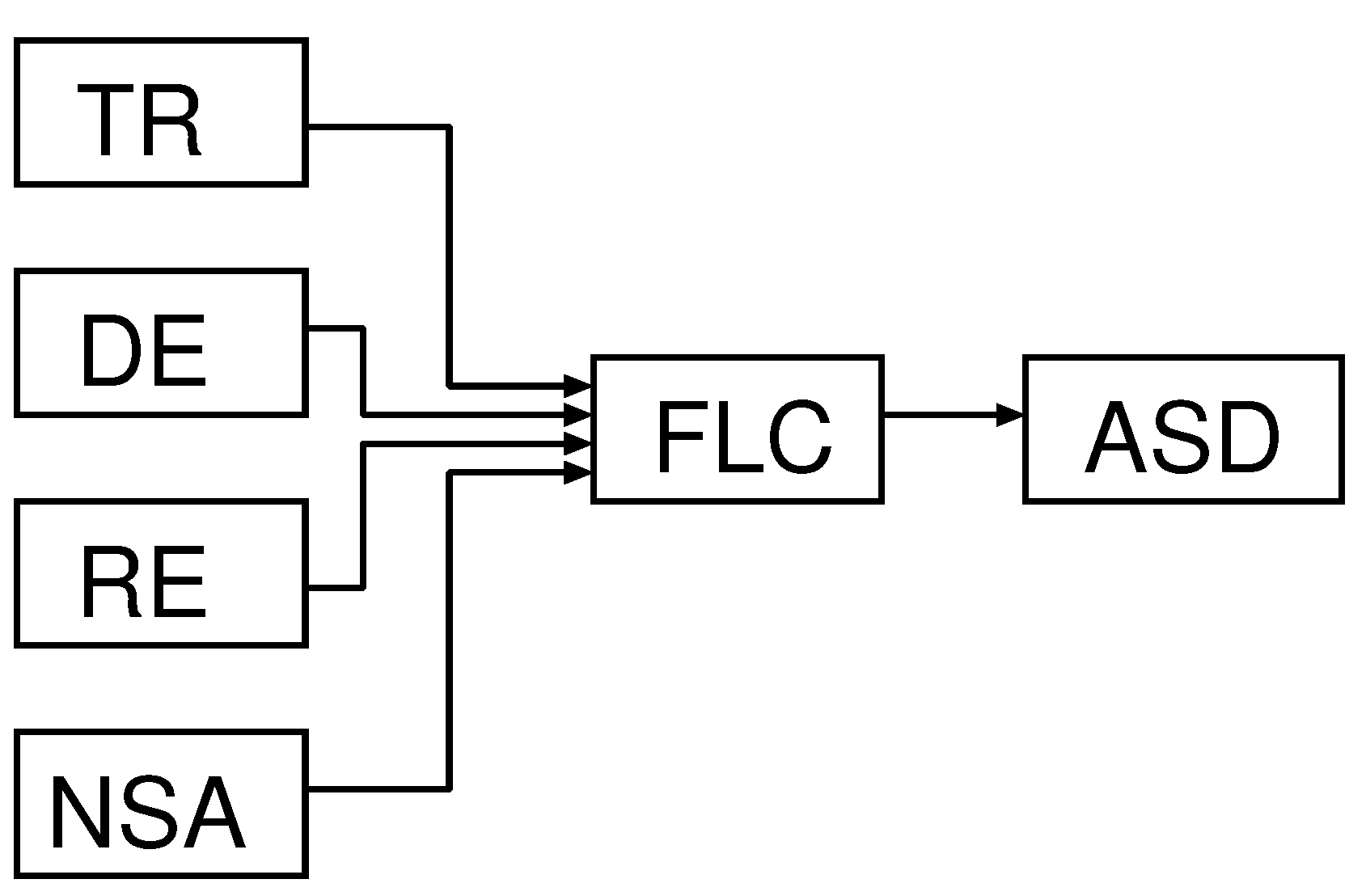
3.3. Description of FBSS1 and FBSS2
- Distance to Event (DE);
- Remaining Energy (RE);
- Number of Sensors per Actor (NSA).
- Transmission Range (TR).
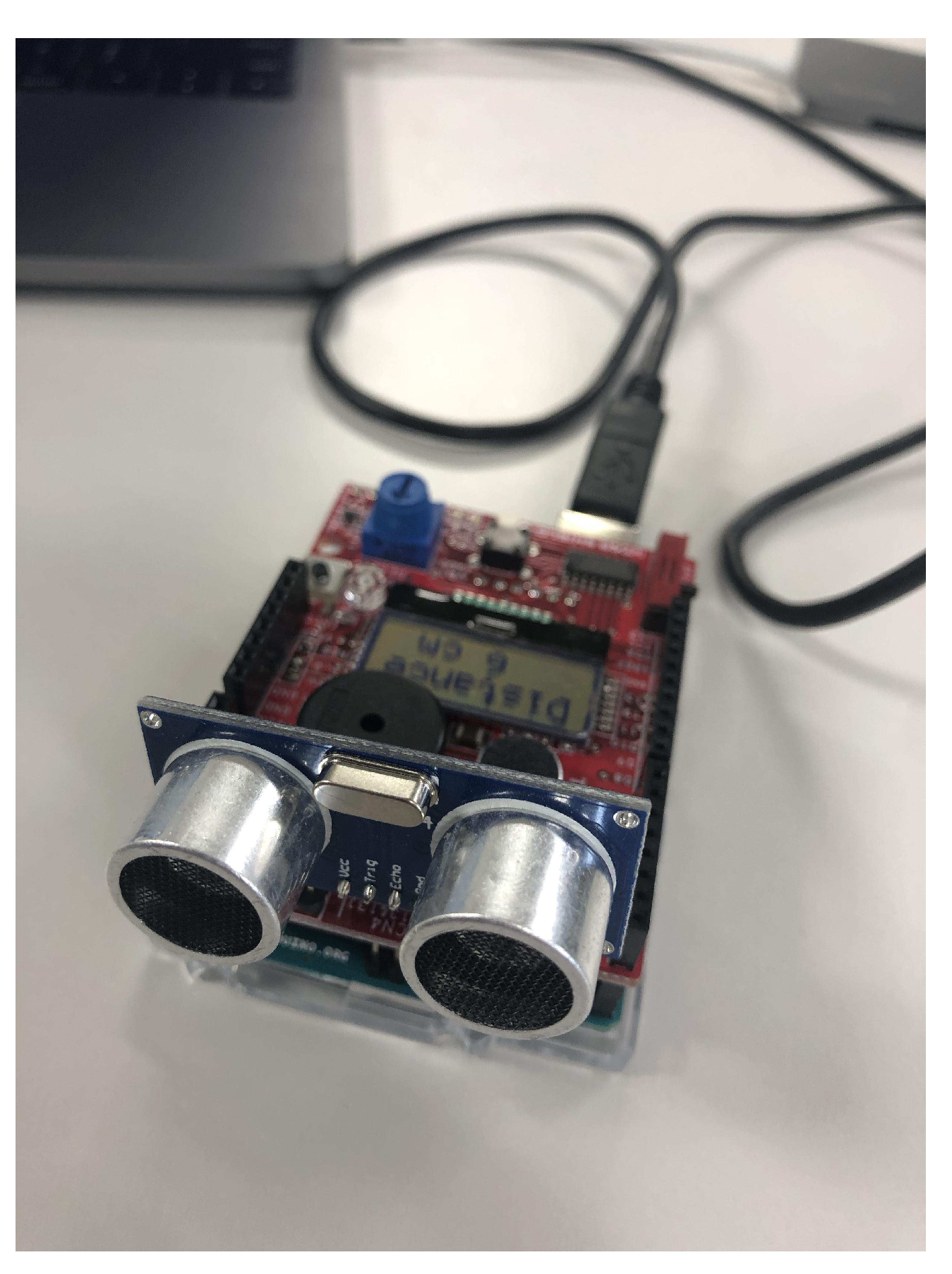
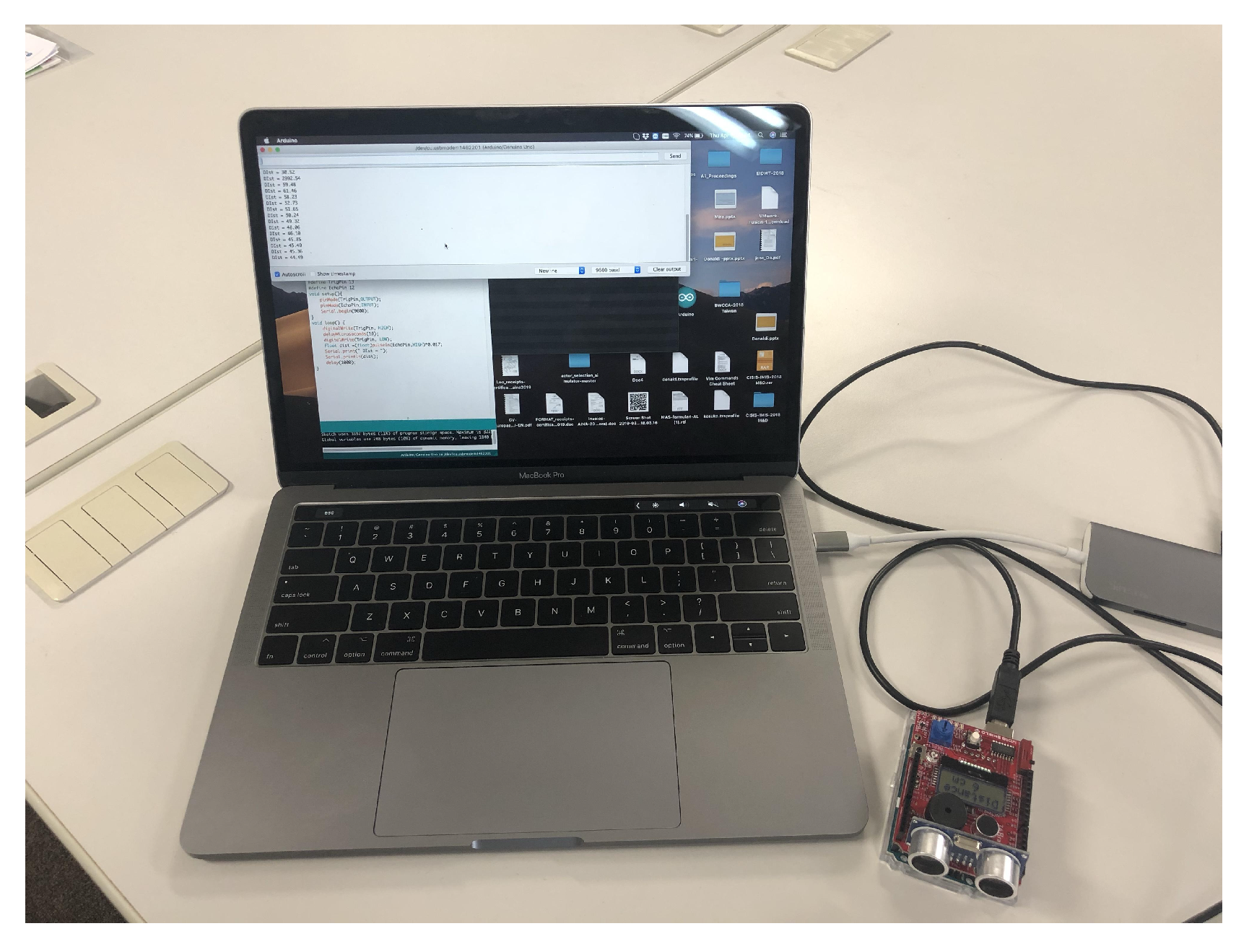
4. Testbed Description
- The transmission range of the actor.
- A power bank or laptop battery to check the levels of remained energy after each measurement.
- Distance sensor to measure the distance from actor to the event.
5. Simulation and Experimental Results
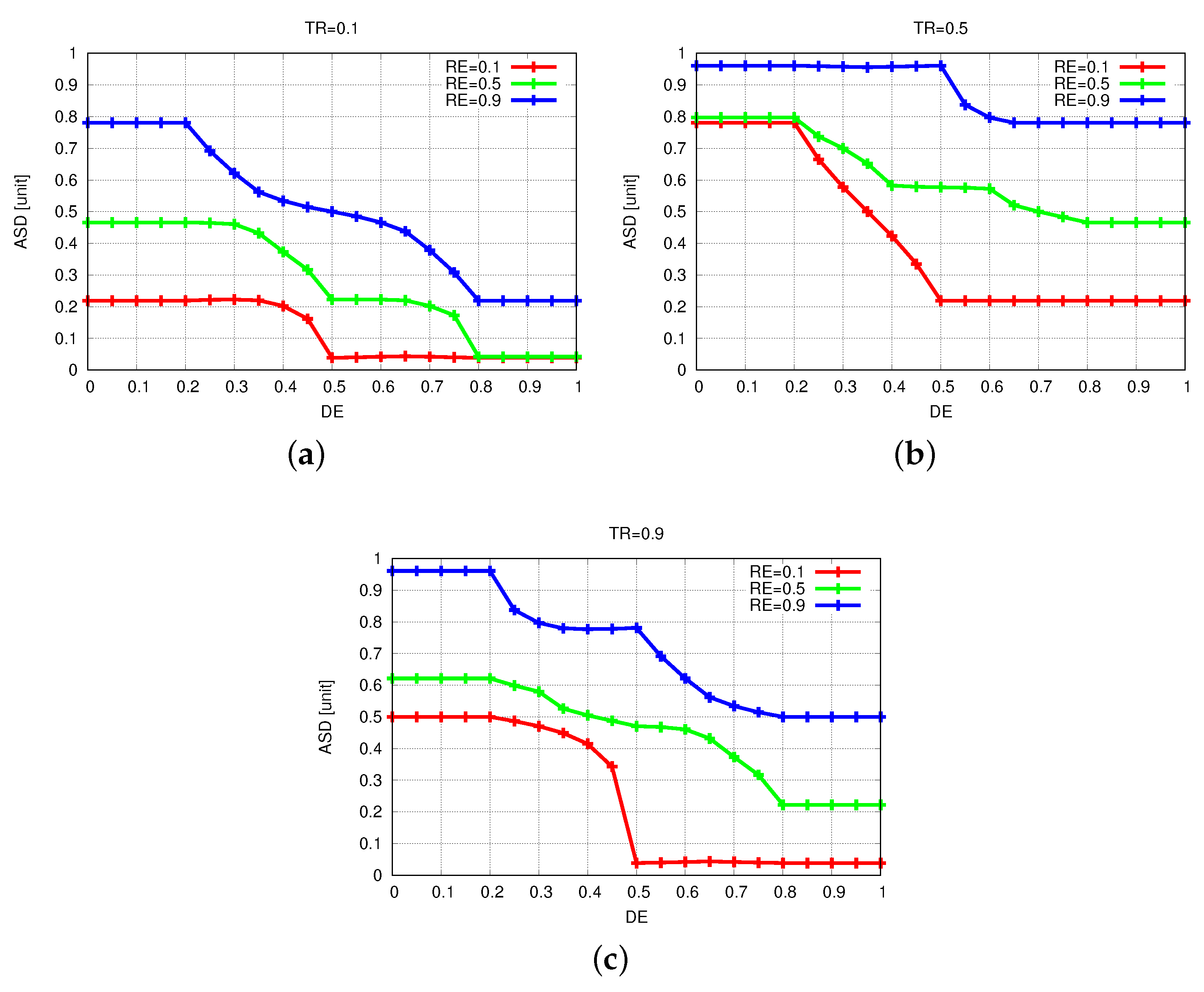
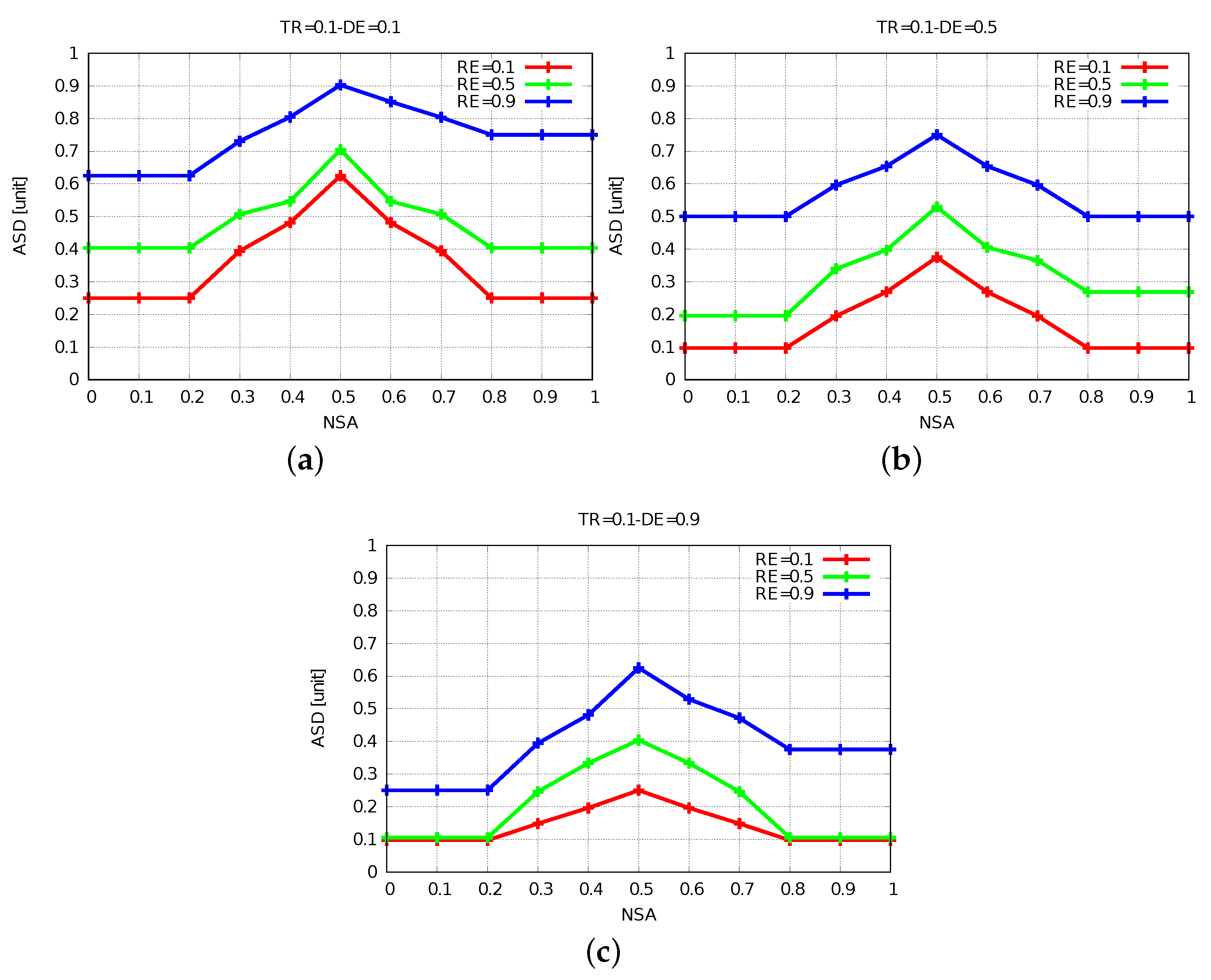
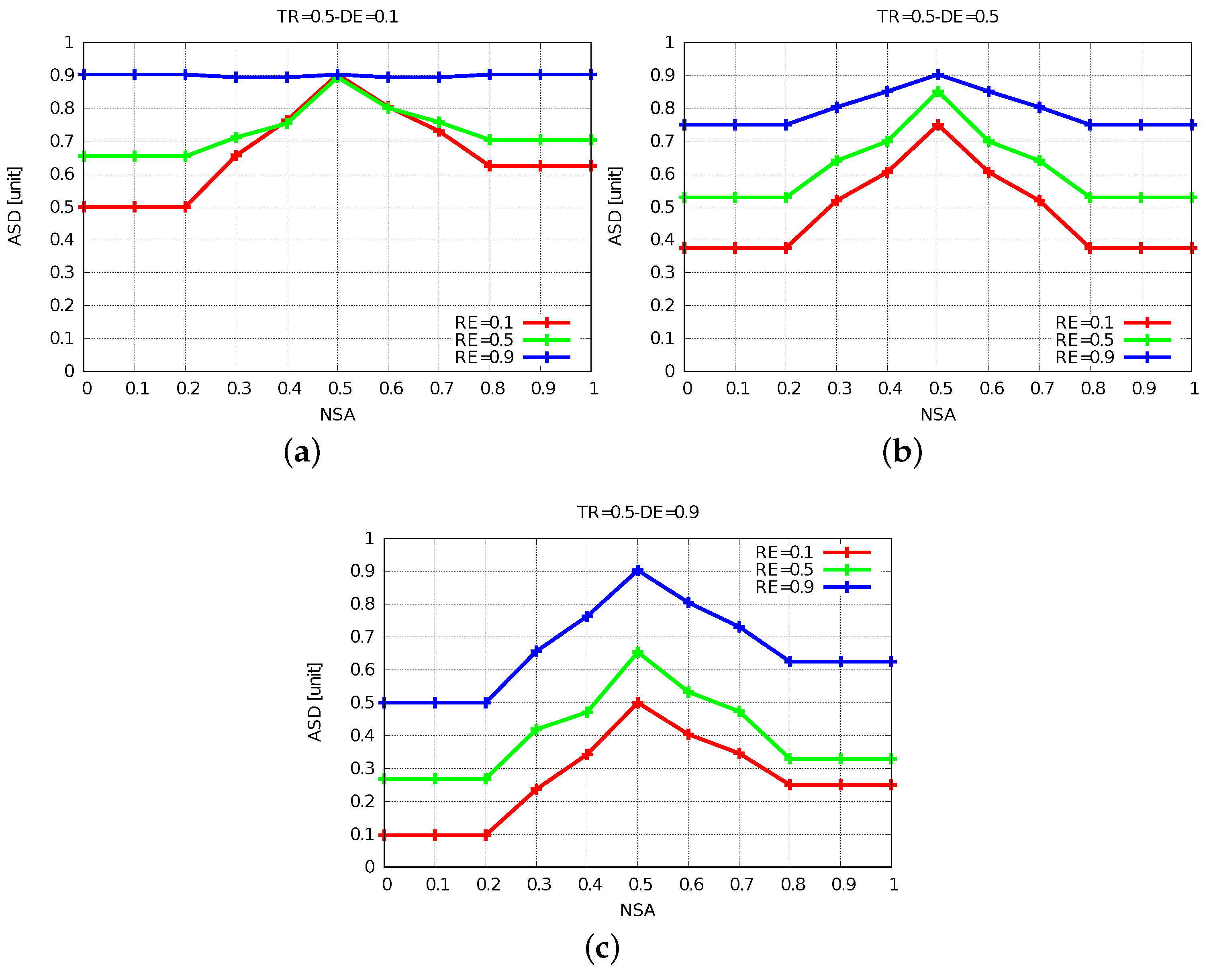
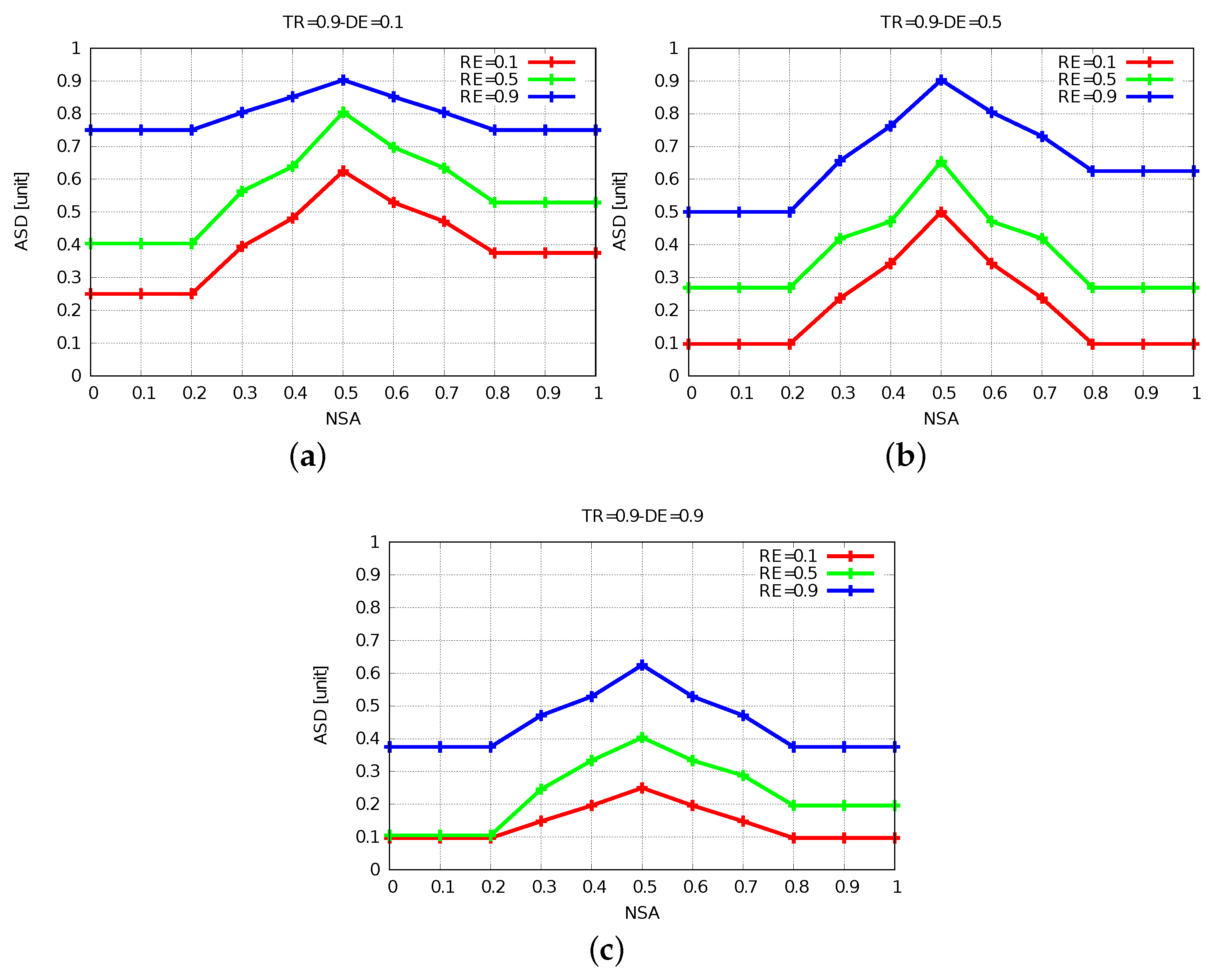
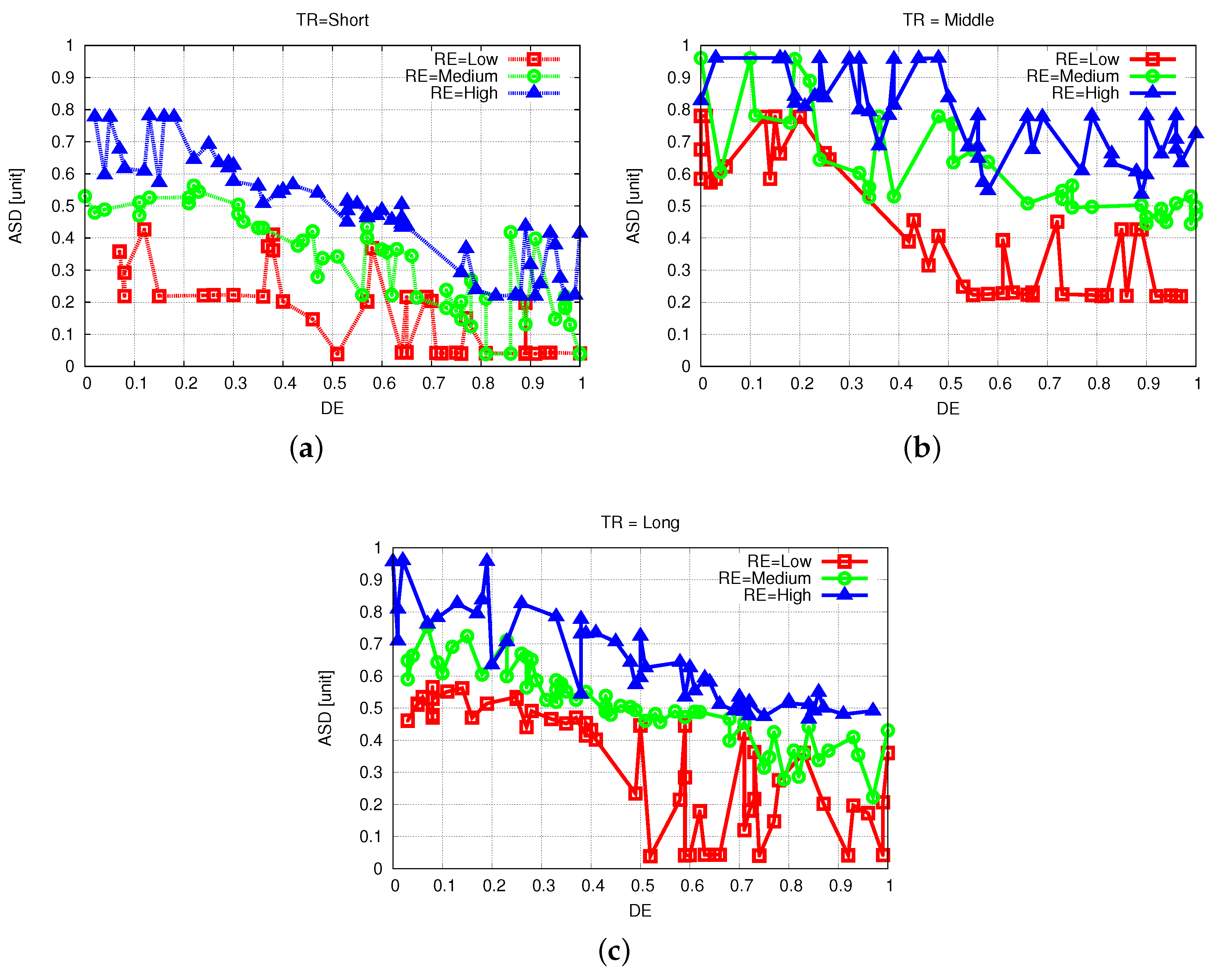
5.1. Simulation Results
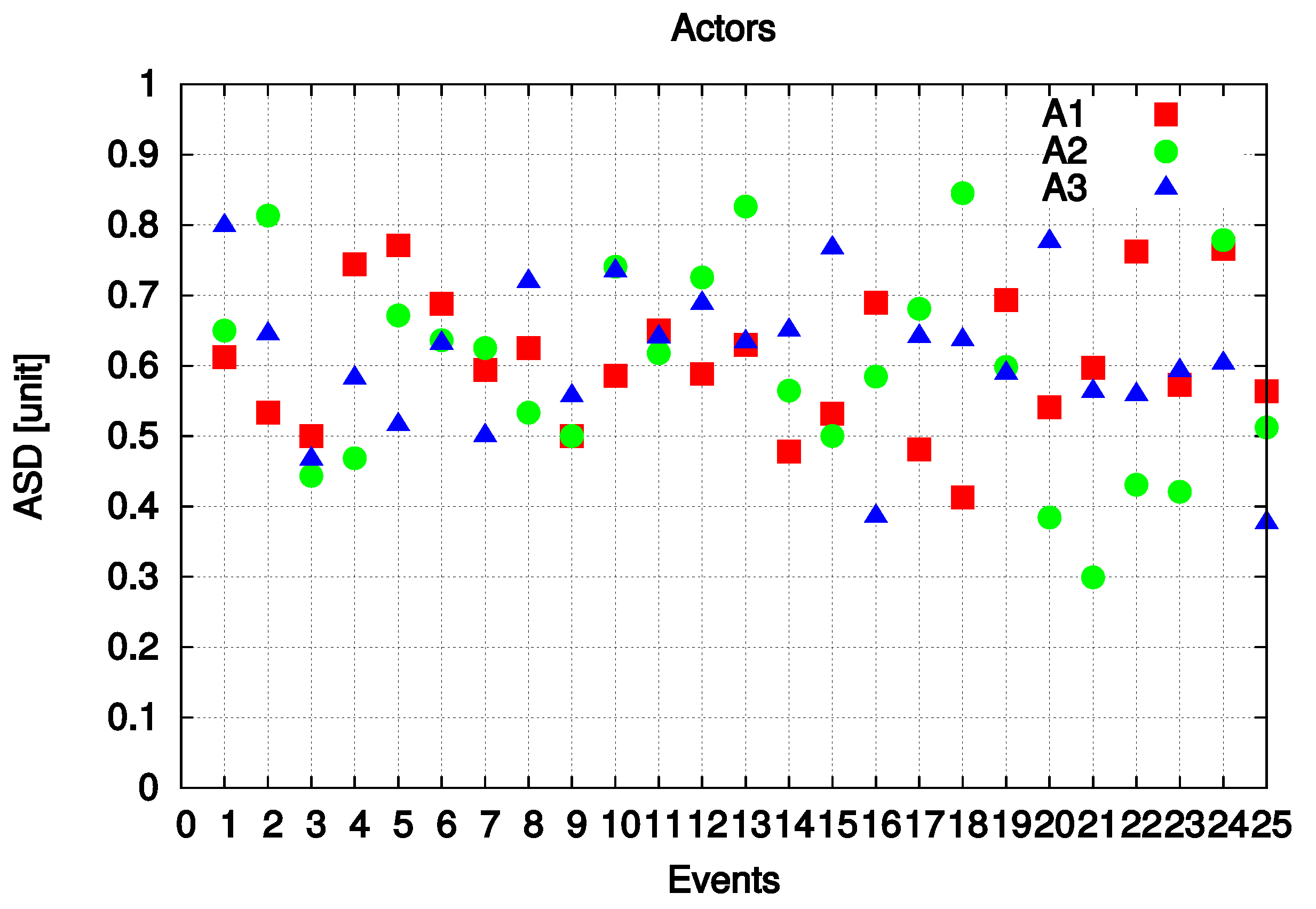
5.2. Experimental Results
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Akyildiz, I.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Atassi, A.; Sayegh, N.; Elhajj, I.H.; Chehab, A.; Kayssi, A. Decentralised malicious node detection in WSN. Int. J. Space Based Situated Comput. 2014, 4, 15–25. [Google Scholar] [CrossRef]
- Boyinbode, O.; Le, H.; Takizawa, M. A survey on clustering algorithms for wireless sensor networks. Int. J. Space Based Situated Comput. 2011, 1, 130–136. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Kasimoglu, I.H. Wireless Sensor and Actor Networks: Research Challenges. Ad Hoc Netw J. 2004, 2, 351–367. [Google Scholar] [CrossRef]
- Bahrepour, M.; Meratnia, N.; Poel, M.; Taghikhaki, Z.; Havinga, P.J. Use of wireless sensor networks for distributed event detection in disaster management applications. Int. J. Space Based Situated Comput. 2012, 2, 58–69. [Google Scholar] [CrossRef]
- Haider, N.; Imran, M.; Saad, N.; Zakariya, M. Performance analysis of reactive connectivity restoration algorithms for wireless sensor and actor networks. In Proceedings of the IEEE Malaysia International Conference on Communications (MICC-2013), Kuala Lumpur, Malaysia, 26–28 November 2013; pp. 490–495. [Google Scholar] [CrossRef]
- Abbasi, A.; Younis, M.; Akkaya, K. Movement-Assisted Connectivity Restoration in Wireless Sensor and Actor Networks. IEEE Trans. Parallel Distrib. Syst. 2009, 20, 1366–1379. [Google Scholar] [CrossRef]
- Li, X.; Liang, X.; Lu, R.; He, S.; Chen, J.; Shen, X. Toward Reliable Actor Services in Wireless Sensor and Actor Networks. In Proceedings of the 2011 IEEE 8th International Conference on Mobile Adhoc and Sensor Systems (MASS), Valencia, Spain, 17–22 October 2011; pp. 351–360. [Google Scholar] [CrossRef]
- Akkaya, K.; Younis, M. COLA: A Coverage and Latency Aware Actor Placement for Wireless Sensor and Actor Networks. In Proceedings of the IEEE 64th Conference on Vehicular Technology (VTC-2006) Fall, Montreal, QC, Canada, 25–28 September 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Kakarla, J.; Majhi, B. A new optimal delay and energy efficient coordination algorithm for WSAN. In Proceedings of the 2013 IEEE International Conference on Advanced Networks and Telecommuncations Systems (ANTS), Kattankulathur, India, 15–18 December 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Elmazi, D.; Cuka, M.; Bylykbashi, K.; Spaho, E.; Ikeda, M.; Barolli, L. Selection of Actor Nodes in Wireless Sensor and Actor Networks Considering Actor-Sensor Coordination Quality Parameter. In Proceedings of the International Conference on Broadband and Wireless Computing, Communication and Applications, Barcelona, Spain, 8–10 November 2017; pp. 87–99. [Google Scholar]
- Barolli, A.; Sakamoto, S.; Durresi, H.; Ohara, S.; Barolli, L.; Takizawa, M. A Comparison Study of Constriction and Linearly Decreasing Vmax Replacement Methods for Wireless Mesh Networks by WMN-PSOHC-DGA Simulation System. In Proceedings of the International Conference on P2P, Parallel, Grid, Cloud and Internet Computing, Antwerp, Belgium, 7–9 November 2019; pp. 26–34. [Google Scholar]
- Ishitaki, T.; Elmazi, D.; Liu, Y.; Oda, T.; Barolli, L.; Uchida, K. Application of neural networks for intrusion detection in tor networks. In Proceedings of the 2015 IEEE 29th International Conference on Advanced Information Networking and Applications Workshops, Gwangju, Korea, 24–27 March 2015; pp. 67–72. [Google Scholar]
- Sakamoto, S.; Kulla, E.; Oda, T.; Ikeda, M.; Barolli, L.; Xhafa, F. A Comparison Study of Simulated Annealing and Genetic Algorithm for Node Placement Problem in Wireless Mesh Networks. J. Mob. Multimed. 2013, 9, 101–110. [Google Scholar]
- Oda, T.; Elmazi, D.; Lala, A.; Kolici, V.; Barolli, L.; Xhafa, F. Analysis of node placement in wireless mesh networks using Friedman test: A comparison study for Tabu Search and hill climbing. In Proceedings of the 2015 9th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing, Blumenau, Brazil, 8–10 July 2015; pp. 133–140. [Google Scholar]
- Elmazi, D.; Cuka, M.; Ikeda, M.; Barolli, L. A Fuzzy-Based System for Actor Node Selection in WSANs for Improving Network Connectivity and Increasing Number of Covered Sensors. In Proceedings of the International Conference on Network-Based Information Systems, Bratislava, Slovakia, 5–7 September 2018; pp. 3–15. [Google Scholar]
- Elmazi, D.; Cuka, M.; Ikeda, M.; Barolli, L. Effect of Size of Giant Component for actor node selection in WSANs: A comparison study. Concurr. Comput. Pract. Exp. 2019, e5106. [Google Scholar] [CrossRef]
- Elmazi, D.; Cuka, M.; Ikeda, M.; Matsuo, K.; Barolli, L. A Fuzzy-Based System for Actor Node Selection in WSANS: Simulation and Experimental Results. In Proceedings of the International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing, Sydney, NSW, Australia, 3–5 July 2019; pp. 11–24. [Google Scholar]
- Akbas, M.; Turgut, D. APAWSAN: Actor positioning for aerial wireless sensor and actor networks. In Proceedings of the 2011 IEEE 36th Conference on Local Computer Networks (LCN), Bonn, Germany, 4–7 October 2011; pp. 563–570. [Google Scholar] [CrossRef]
- Akbas, M.; Brust, M.; Turgut, D. Local positioning for environmental monitoring in wireless sensor and actor networks. In Proceedings of the 2010 IEEE 35th Conference on Local Computer Networks (LCN), Denver, CO, USA, 10–14 October 2010; pp. 806–813. [Google Scholar] [CrossRef]
- Gungor, V.; Akan, O.; Akyildiz, I. A Real-Time and Reliable Transport (RT2) Protocol for Wireless Sensor and Actor Networks. IEEE/ACM Trans. Netw. 2008, 16, 359–370. [Google Scholar] [CrossRef]
- Melodia, T.; Pompili, D.; Gungor, V.; AkyildizZX, I. Communication and Coordination in Wireless Sensor and Actor Networks. IEEE Trans. Mob. Comput. 2007, 6, 1126–1129. [Google Scholar] [CrossRef]
- Nakayama, H.; Fadlullah, Z.; Ansari, N.; Kato, N. A Novel Scheme for WSAN Sink Mobility Based on Clustering and Set Packing Techniques. IEEE Trans. Autom. Control. 2011, 56, 2381–2389. [Google Scholar] [CrossRef]
- Kulla, E.; Ikeda, M.; Leonard, B. A Fuzzy Approach to Actor Selection in Wireless Sensor and Actor Networks. In Proceedings of the 17th International Conference on Network-Based Information Systems (NBiS-2014), Salerno, Italy, 10–12 September 2014; pp. 244–248. [Google Scholar]
- Inaba, T.; Sakamoto, S.; Kolici, V.; Mino, G.; Barolli, L. A CAC Scheme Based on Fuzzy Logic for Cellular Networks Considering Security and Priority Parameters. In Proceedings of the 9th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA-2014), Guangdong, China, 8–10 November 2014; pp. 340–346. [Google Scholar]
- Spaho, E.; Sakamoto, S.; Barolli, L.; Xhafa, F.; Barolli, V.; Iwashige, J. A Fuzzy-Based System for Peer Reliability in JXTA-Overlay P2P Considering Number of Interactions. In Proceedings of the 16th International Conference on Network-Based Information Systems (NBiS-2013), Gwangju, Korea, 4–6 September 2013; pp. 156–161. [Google Scholar]
- Matsuo, K.; Elmazi, D.; Liu, Y.; Sakamoto, S.; Mino, G.; Barolli, L. FACS-MP: A fuzzy admission control system with many priorities for wireless cellular networks and its performance evaluation. J. High Speed Netw. 2015, 21, 1–14. [Google Scholar] [CrossRef]
- Grabisch, M. The Application of Fuzzy Integrals in Multicriteria Decision Making. Eur. J. Oper. Res. 1996, 89, 445–456. [Google Scholar] [CrossRef]
- Inaba, T.; Elmazi, D.; Liu, Y.; Sakamoto, S.; Barolli, L.; Uchida, K. Integrating Wireless Cellular and Ad-Hoc Networks Using Fuzzy Logic Considering Node Mobility and Security. In Proceedings of the 29th IEEE International Conference on Advanced Information Networking and Applications Workshops (WAINA-2015), Gwangju, Korea, 24–27 March 2015; pp. 54–60. [Google Scholar]
- Kulla, E.; Mino, G.; Sakamoto, S.; Ikeda, M.; Caballé, S.; Barolli, L. FBMIS: A Fuzzy-Based Multi-interface System for Cellular and Ad Hoc Networks. In Proceedings of the International Conference on Advanced Information Networking and Applications (AINA-2014), Victoria, BC, Canada, 13–16 May 2014; pp. 180–185. [Google Scholar]
- Elmazi, D.; Kulla, E.; Oda, T.; Spaho, E.; Sakamoto, S.; Barolli, L. A comparison study of two fuzzy-based systems for selection of actor node in wireless sensor actor networks. J. Ambient. Intell. Humaniz. Comput. 2015, 6, 635–645. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy Logic, Neural Networks, and Soft Computing. Commun. ACM 1994, 37, 77–84. [Google Scholar] [CrossRef]
- Spaho, E.; Sakamoto, S.; Barolli, L.; Xhafa, F.; Ikeda, M. Trustworthiness in P2P: Performance Behaviour of Two Fuzzy-based Systems for JXTA-overlay Platform. Soft Comput. 2014, 18, 1783–1793. [Google Scholar] [CrossRef]
- Inaba, T.; Sakamoto, S.; Kulla, E.; Caballe, S.; Ikeda, M.; Barolli, L. An Integrated System for Wireless Cellular and Ad-Hoc Networks Using Fuzzy Logic. In Proceedings of the International Conference on Intelligent Networking and Collaborative Systems (INCoS-2014), Salerno, Italy, 10–12 September 2014; pp. 157–162. [Google Scholar]
- Matsuo, K.; Elmazi, D.; Liu, Y.; Sakamoto, S.; Barolli, L. A multi-modal simulation system for wireless sensor networks: A comparison study considering stationary and mobile sink and event. J. Ambient. Intell. Humaniz. Comput. 2015, 6, 519–529. [Google Scholar] [CrossRef]
- Kolici, V.; Inaba, T.; Lala, A.; Mino, G.; Sakamoto, S.; Barolli, L. A Fuzzy-Based CAC Scheme for Cellular Networks Considering Security. In Proceedings of the International Conference on Network-Based Information Systems (NBiS-2014), Salerno, Italy, 10–12 September 2014; pp. 368–373. [Google Scholar]
- Liu, Y.; Sakamoto, S.; Matsuo, K.; Ikeda, M.; Barolli, L.; Xhafa, F. A comparison study for two fuzzy-based systems: Improving reliability and security of JXTA-overlay P2P platform. Soft Comput. 2016, 20, 2677–2687. [Google Scholar] [CrossRef][Green Version]
- Elmazi, D.; Oda, T.; Spaho, E.; Kulla, E.; Ikeda, M.; Barolli, L. A Fuzzy-Based Simulation System for Actor Selection in Wireless Sensor and Actor Networks Considering as a New Parameter Density of Actor Nodes. In Proceedings of the International Conference on Broadband and Wireless Computing, Communication and Applications, Asan, Korea, 5–7 November 2016; pp. 163–174. [Google Scholar]
- Elmazi, D.; Cuka, M.; Oda, T.; Kulla, E.; Ikeda, M.; Barolli, L. Effect of Packet Error Rate on Selection of Actor Nodes in WSANs: A Comparison Study of Two Fuzzy-Based Systems. In Proceedings of the International Conference on Network-Based Information Systems, Toronto, ON, Canada, 24–26 August 2017; pp. 114–126. [Google Scholar]
- Cuka, M.; Elmazi, D.; Bylykbashi, K.; Spaho, E.; Ikeda, M.; Barolli, L. Effect of node centrality for IoT device selection in opportunistic networks: A comparison study. Concurr. Comput. Pract. Exp. 2018, 30, e4790. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Term Sets |
|---|---|
| Transmission Range (TR) | Short (Sh), Middle (Mi), Long (Ln) |
| Distance to Event (DE) | Near (Ne), Moderate (Mo), Far (Fa) |
| Remaining Energy (RE) | Low (Lo), Medium (Mdm), High (Hi) |
| Number of Sensors per Actor (NSA) | Few (Fw), Medium (Me), Many (My) |
| Actor Selection Decision (ASD) | Very Low Selection Possibility (VLSP), Low Selection Possibility (LSP), Middle Selection Possibility (MSP), High Selection Possibility (HSP), Very High Selection Possibility (VHSP) |
| No. | NSA | RE | DE | ASD |
|---|---|---|---|---|
| 1 | Fw | Lo | Ne | LSP |
| 2 | Fw | Lo | Mo | VLSP |
| 3 | Fw | Lo | Fa | VLSP |
| 4 | Fw | Mdm | Ne | MSP |
| 5 | Fw | Mdm | Mo | VLSP |
| 6 | Fw | Mdm | Fa | VLSP |
| 7 | Fw | Hi | Ne | VHSP |
| 8 | Fw | Hi | Mo | LSP |
| 9 | Fw | Hi | Fa | LSP |
| 10 | Me | Lo | Ne | MSP |
| 11 | Me | Lo | Mo | VLSP |
| 12 | Me | Lo | Fa | VLSP |
| 13 | Me | Mdm | Ne | VHSP |
| 14 | Me | Mdm | Mo | LSP |
| 15 | Me | Mdm | Fa | VLSP |
| 16 | Me | Hi | Ne | VHSP |
| 17 | Me | Hi | Mo | MSP |
| 18 | Me | Hi | Fa | LSP |
| 19 | My | Lo | Ne | LSP |
| 20 | My | Lo | Mo | VLSP |
| 21 | My | Lo | Fa | VLSP |
| 22 | My | Mdm | Ne | MSP |
| 23 | My | Mdm | Mo | VLSP |
| 24 | My | Mdm | Fa | VLSP |
| 25 | My | Hi | Ne | VHSP |
| 26 | My | Hi | Mo | LSP |
| 27 | My | Hi | Fa | LSP |
| No. | TR | DE | RE | NSA | ASD | No. | TR | DE | RE | NSA | ASD |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Sh | Ne | Lo | Fw | VLSP | 41 | Mi | Mo | Mdm | Me | VHSP |
| 2 | Sh | Ne | Lo | Me | HSP | 42 | Mi | Mo | Mdm | My | HSP |
| 3 | Sh | Ne | Lo | My | VLSP | 43 | Mi | Mo | Hi | Fw | VHSP |
| 4 | Sh | Ne | Mdm | Fw | MSP | 44 | Mi | Mo | Hi | Me | VHSP |
| 5 | Sh | Ne | Mdm | Me | VHSP | 45 | Mi | Mo | Hi | My | VHSP |
| 6 | Sh | Ne | Mdm | My | MSP | 46 | Mi | Fa | Lo | Fw | VLSP |
| 7 | Sh | Ne | Hi | Fw | HSP | 47 | Mi | Fa | Lo | Me | MSP |
| 8 | Sh | Ne | Hi | Me | VHSP | 48 | Mi | Fa | Lo | My | VLSP |
| 9 | Sh | Ne | Hi | My | VHSP | 49 | Mi | Fa | Mdm | Fw | LSP |
| 10 | Sh | Mo | Lo | Fw | VLSP | 50 | Mi | Fa | Mdm | Me | VHSP |
| 11 | Sh | Mo | Lo | Me | LSP | 51 | Mi | Fa | Mdm | My | LSP |
| 12 | Sh | Mo | Lo | My | VLSP | 52 | Mi | Fa | Hi | Fw | MSP |
| 13 | Sh | Mo | Mdm | Fw | VLSP | 53 | Mi | Fa | Hi | Me | VHSP |
| 14 | Sh | Mo | Mdm | Me | HSP | 54 | Mi | Fa | Hi | My | HSP |
| 15 | Sh | Mo | Mdm | My | LSP | 55 | Ln | Ne | Lo | Fw | VLSP |
| 16 | Sh | Mo | Hi | Fw | MSP | 56 | Ln | Ne | Lo | Me | HSP |
| 17 | Sh | Mo | Hi | Me | VHSP | 57 | Ln | Ne | Lo | My | LSP |
| 18 | Sh | Mo | Hi | My | MSP | 58 | Ln | Ne | Mdm | Fw | MSP |
| 19 | Sh | Fa | Lo | Fw | VLSP | 59 | Ln | Ne | Mdm | Me | VHSP |
| 20 | Sh | Fa | Lo | Me | VLSP | 60 | Ln | Ne | Mdm | My | HSP |
| 21 | Sh | Fa | Lo | My | VLSP | 61 | Ln | Ne | Hi | Fw | VHSP |
| 22 | Sh | Fa | Mdm | Fw | VLSP | 62 | Ln | Ne | Hi | Me | VHSP |
| 23 | Sh | Fa | Mdm | Me | MSP | 63 | Ln | Ne | Hi | My | VHSP |
| 24 | Sh | Fa | Mdm | My | VLSP | 64 | Ln | Mo | Lo | Fw | VLSP |
| 25 | Sh | Fa | Hi | Fw | VLSP | 65 | Ln | Mo | Lo | Me | MSP |
| 26 | Sh | Fa | Hi | Me | HSP | 66 | Ln | Mo | Lo | My | VLSP |
| 27 | Sh | Fa | Hi | My | LSP | 67 | Ln | Mo | Mdm | Fw | LSP |
| 28 | Mi | Ne | Lo | Fw | MSP | 68 | Ln | Mo | Mdm | Me | VHSP |
| 29 | Mi | Ne | Lo | Me | VHSP | 69 | Ln | Mo | Mdm | My | LSP |
| 30 | Mi | Ne | Lo | My | HSP | 70 | Ln | Mo | Hi | Fw | MSP |
| 31 | Mi | Ne | Mdm | Fw | VHSP | 71 | Ln | Mo | Hi | Me | VHSP |
| 32 | Mi | Ne | Mdm | Me | VHSP | 72 | Ln | Mo | Hi | My | HSP |
| 33 | Mi | Ne | Mdm | My | VHSP | 73 | Ln | Fa | Lo | Fw | VLSP |
| 34 | Mi | Ne | Hi | Fw | VHSP | 74 | Ln | Fa | Lo | Me | VLSP |
| 35 | Mi | Ne | Hi | Me | VHSP | 75 | Ln | Fa | Lo | My | VLSP |
| 36 | Mi | Ne | Hi | My | VHSP | 76 | Ln | Fa | Mdm | Fw | VLSP |
| 37 | Mi | Mo | Lo | Fw | LSP | 77 | Ln | Fa | Mdm | Me | MSP |
| 38 | Mi | Mo | Lo | Me | VHSP | 78 | Ln | Fa | Mdm | My | VLSP |
| 39 | Mi | Mo | Lo | My | LSP | 79 | Ln | Fa | Hi | Fw | LSP |
| 40 | Mi | Mo | Mdm | Fw | HSP | 80 | Ln | Fa | Hi | Me | HSP |
| 81 | Ln | Fa | Hi | My | LSP |
| Experimental Parameters | |
|---|---|
| Operating System | MacOS, Ubuntu 18.04 |
| Experiment Area | Indoor 2 × 2 (m2) |
| Number of Actors | 3 [Arduino Uno] |
| Number of Sensors | 3 [TR, Battery, Distance] |
| Number of Events | 25 |
| IDE | Arduino IDE v. 1.8.8, Processing v. 3.5.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elmazi, D.; Cuka, M.; Ikeda, M.; Matsuo, K.; Barolli, L. Application of Fuzzy Logic for Selection of Actor Nodes in WSANs —Implementation of Two Fuzzy-Based Systems and a Testbed. Sensors 2019, 19, 5573. https://doi.org/10.3390/s19245573
Elmazi D, Cuka M, Ikeda M, Matsuo K, Barolli L. Application of Fuzzy Logic for Selection of Actor Nodes in WSANs —Implementation of Two Fuzzy-Based Systems and a Testbed. Sensors. 2019; 19(24):5573. https://doi.org/10.3390/s19245573
Chicago/Turabian StyleElmazi, Donald, Miralda Cuka, Makoto Ikeda, Keita Matsuo, and Leonard Barolli. 2019. "Application of Fuzzy Logic for Selection of Actor Nodes in WSANs —Implementation of Two Fuzzy-Based Systems and a Testbed" Sensors 19, no. 24: 5573. https://doi.org/10.3390/s19245573
APA StyleElmazi, D., Cuka, M., Ikeda, M., Matsuo, K., & Barolli, L. (2019). Application of Fuzzy Logic for Selection of Actor Nodes in WSANs —Implementation of Two Fuzzy-Based Systems and a Testbed. Sensors, 19(24), 5573. https://doi.org/10.3390/s19245573