A Pilot Study on Falling-Risk Detection Method Based on Postural Perturbation Evoked Potential Features

 and
and
Abstract
1. Introduction
2. Materials and Methods
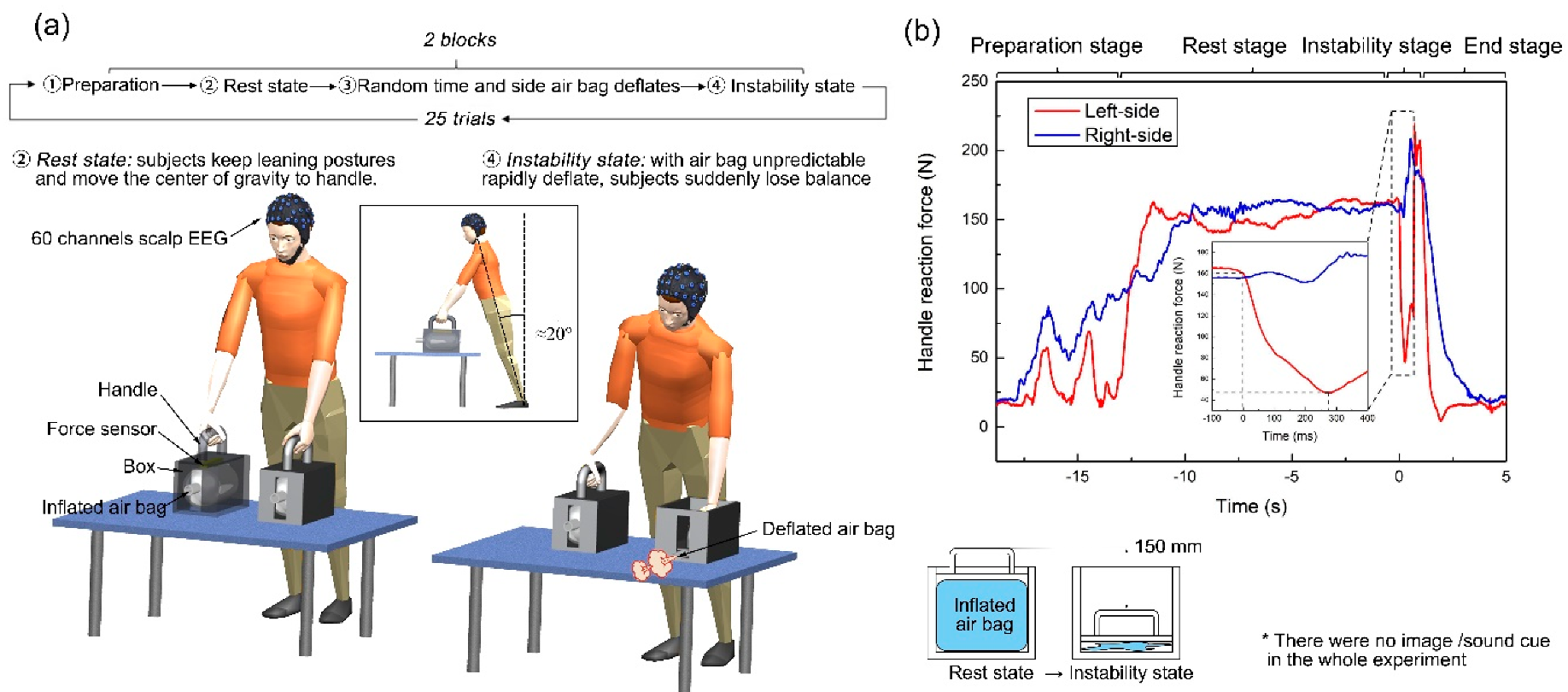
2.1. Subjects and Experimental Paradigm
2.2. Data Recording
2.3. Removal of Potential Interfering Factors
2.4. EEG Feature Extraction and Pattern Recognition
3. Results
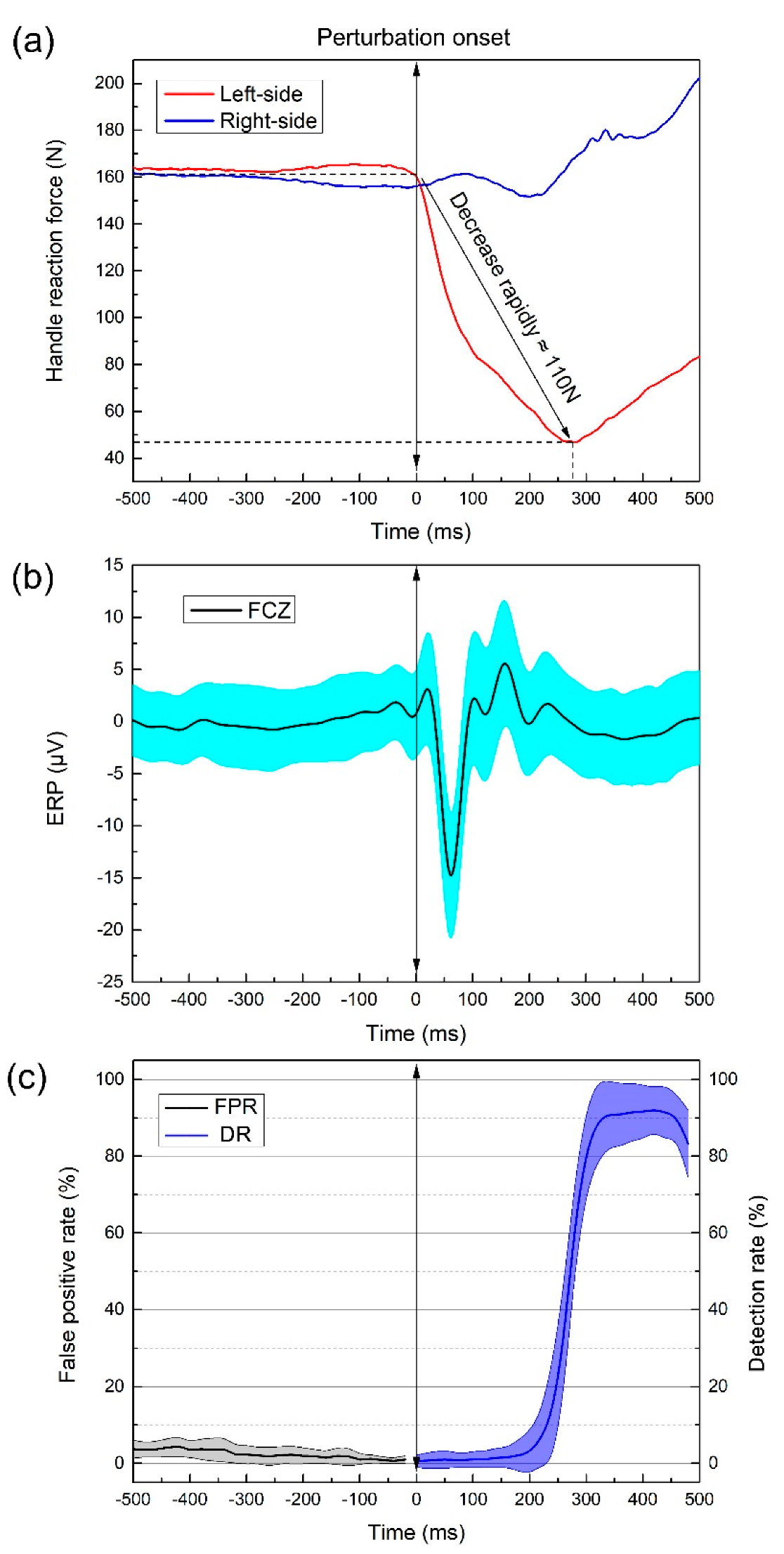
3.1. Classification Performance of Postural Perturbation Event
3.2. Time-Spatial Distribution of ERP Component
3.3. Generalization Performance of Cross-Task Recognition
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yu, M.; Rhuma, A.; Naqvi, S.M.; Wang, L.; Chambers, J. A Posture Recognition-Based Fall Detection System for Monitoring an Elderly Person in a Smart Home Environment. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 1274–1286. [Google Scholar] [PubMed]
- Khan, S.S.; Hoey, J. Review of fall detection techniques: A data availability perspective. Med. Eng. Phys. 2017, 39, 12–22. [Google Scholar] [CrossRef] [PubMed]
- Noury, N.; Fleury, A.; Rumeau, P.; Bourke, A.K.; Laighin, G.O.; Rialle, V.; Lundy, J.E. Fall detection—Principles and methods. In Proceedings of the 2007 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; p. 1663. [Google Scholar]
- Alzahrani, M.S.; Jarraya, S.K.; Ben-Abdallah, H.; Ali, M.S. Comprehensive evaluation of skeleton features-based fall detection from Microsoft Kinect v2. Signal Image Video Process. 2019, 13, 1431–1439. [Google Scholar] [CrossRef]
- Maurer, C.; Mergner, T.; Peterka, R.J. Multisensory control of human upright stance. Exp. Brain Res. 2006, 171, 231–250. [Google Scholar] [CrossRef]
- Bingham, J.T.; Choi, J.T.; Ting, L.H. Stability in a frontal plane model of balance requires coupled changes to postural configuration and neural feedback control. J. Neurophysiol. 2011, 106, 437. [Google Scholar] [CrossRef]
- Mergner, T. A neurological view on reactive human stance control. Annu. Rev. Control 2010, 34, 177–198. [Google Scholar] [CrossRef]
- Kiemel, T.; Elahi, A.J.; Jeka, J.J. Identification of the plant for upright stance in humans: Multiple movement patterns from a single neural strategy. J. Neurophysiol. 2008, 100, 3394. [Google Scholar] [CrossRef]
- Mergner, T.; Maurer, C.; Peterka, R.J. A multisensory posture control model of human upright stance. Prog. Brain Res. 2003, 142, 189–201. [Google Scholar]
- Gwin, J.T.; Gramann, K.; Makeig, S.; Ferris, D.P. Electrocortical activity is coupled to gait cycle phase during treadmill walking. Neuroimage 2011, 54, 1289–1296. [Google Scholar] [CrossRef]
- Mihara, M.; Miyai, I.; Hatakenaka, M.; Kubota, K.; Sakoda, S. Role of the prefrontal cortex in human balance control. Neuroimage 2008, 43, 329–336. [Google Scholar] [CrossRef]
- Andreas, M.; Thorben, H.; Strüder, H.K. Changes in cortical activity associated with adaptive behavior during repeated balance perturbation of unpredictable timing. Front. Behav. Neurosci. 2015, 9, 272. [Google Scholar]
- Mochizuki, G.; Sibley, K.M.; Esposito, J.G.; Camilleri, J.M.; McIlroy, W.E. Cortical responses associated with the preparation and reaction to full-body perturbations to upright stability. Clin. Neurophysiol. 2008, 119, 1626–1637. [Google Scholar] [CrossRef] [PubMed]
- Sipp, A.R.; Gwin, J.T.; Makeig, S.; Ferris, D.P. Loss of balance during balance beam walking elicits a multifocal theta band electrocortical response. J. Neurophysiol. 2013, 110, 2050. [Google Scholar] [CrossRef] [PubMed]
- Hülsdünker, T.; Mierau, A.; Neeb, C.; Kleinöder, H.; Strüder, H.K. Cortical processes associated with continuous balance control as revealed by EEG spectral power. Neurosci. Lett. 2015, 592, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Varghese, J.P.; Marlin, A.; Beyer, K.B.; Staines, W.R.; Mochizuki, G.; McIlroy, W.E. Frequency characteristics of cortical activity associated with perturbations to upright stability. Neurosci. Lett. 2014, 578, 33–38. [Google Scholar] [CrossRef]
- Karinkanta, S.; Piirtola, M.; Sievänen, H.; Uusi-Rasi, K.; Kannus, P. Physical therapy approaches to reduce fall and fracture risk among older adults. Nat. Rev. Endocrinol. 2010, 6, 396. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Brunner, C.; Schlögl, A.; Da Silva, F.L. Mu rhythm (de)synchronization and EEG single-trial classification of different motor imagery tasks. Neuroimage 2006, 31, 153–159. [Google Scholar] [CrossRef]
- Lew, E.; Chavarriaga, R.; Silvoni, S.; Millán, J.D.R. Detection of self-paced reaching movement intention from EEG signals. Front. Neuroeng. 2012, 5, 13. [Google Scholar] [CrossRef]
- Ibáñez, J.; Serrano, J.I.; Del Castillo, M.D.; Monge-Pereira, E.; Molina-Rueda, F.; Alguacil-Diego, I.; Pons, J.L. Detection of the onset of upper-limb movements based on the combined analysis of changes in the sensorimotor rhythms and slow cortical potentials. J. Neural Eng. 2014, 11, 056009. [Google Scholar] [CrossRef]
- Rivet, B.; Souloumiac, A.; Attina, V.; Gibert, G. xDAWN algorithm to enhance evoked potentials: Application to brain-computer interface. IEEE Trans. Biomed. Eng. 2009, 56, 2035. [Google Scholar] [CrossRef]
- Hoffmann, U.; Vesin, J.M.; Ebrahimi, T.; Diserens, K. An efficient P300-based brain-computer interface for disabled subjects. J. Neurosci. Methods 2008, 167, 115–125. [Google Scholar] [CrossRef] [PubMed]
- Luu, P.; Tucker, D.M.; Makeig, S. Frontal midline theta and the error-related negativity: Neurophysiological mechanisms of action regulation. Clin. Neurophysiol. 2004, 115, 1821–1835. [Google Scholar] [CrossRef] [PubMed]
- Mochizuki, G.; Sibley, K.M.; Cheung, H.J.; Camilleri, J.M.; McIlroy, W.E. Generalizability of perturbation-evoked cortical potentials: Independence from sensory, motor and overall postural state. Neurosci. Lett. 2009, 451, 40–44. [Google Scholar] [CrossRef] [PubMed]
- Marlin, A.; Mochizuki, G.; Staines, W.R.; McIlroy, W.E. Localizing evoked cortical activity associated with balance reactions: Does the anterior cingulate play a role? J. Neurophysiol. 2014, 111, 2634–2643. [Google Scholar] [CrossRef] [PubMed]
- Adkin, A.L.; Campbell, A.D.; Chua, R.; Carpenter, M.G. The influence of postural threat on the cortical response to unpredictable and predictable postural perturbations. Neurosci. Lett. 2008, 435, 120–125. [Google Scholar] [CrossRef] [PubMed]
- Shadmehr, R.; Smith, M.A.; Krakauer, J.W. Error Correction, Sensory Prediction, and Adaptation in Motor Control. Annu. Rev. Neurosci. 2010, 33, 89–108. [Google Scholar] [CrossRef] [PubMed]
- Joch, M.; Hegele, M.; Maurer, H.; Müller, H.; Maurer, L.K. Brain negativity as an indicator of predictive error processing: The contribution of visual action effect monitoring. J. Neurophysiol. 2017, 118, 486–495. [Google Scholar] [CrossRef]
- Gehring, W.J.; Goss, B.; Coles, M.G.; Meyer, D.E.; Donchin, E. The Error-Related Negativity. Perspect. Psychol. Sci. 2018, 13, 200–204. [Google Scholar] [CrossRef]
- Gehring, W.J.; Goss, B.; Coles, M.G.; Meyer, D.E.; Donchin, E. A Neural System for Error-Detection and Compensation. Psychol. Sci. 1993, 4, 385–390. [Google Scholar] [CrossRef]
- Kayser, C.; Ince, R.A.A.; Panzeri, S. Analysis of Slow (Theta) Oscillations as a Potential Temporal Reference Frame for Information Coding in Sensory Cortices. PLoS Comput. Biol. 2012, 8, 13. [Google Scholar] [CrossRef]
- Canolty, R.T.; Edwards, E.; Dalal, S.S.; Soltani, M.; Nagarajan, S.S.; Kirsch, H.E.; Berger, M.S.; Barbaro, N.M.; Knight, R.T. High gamma power is phase-locked to theta oscillations in human neocortex. Science 2006, 313, 1626–1628. [Google Scholar] [CrossRef] [PubMed]
- Wessel, J.R. Error awareness and the error-related negativity: Evaluating the first decade of evidence. Front. Hum. Neurosci. 2012, 6, 16. [Google Scholar] [CrossRef] [PubMed]
- Wessel, J.R.; Aron, A.R. On the Globality of Motor Suppression: Unexpected Events and Their Influence on Behavior and Cognition. Neuron 2017, 93, 259–280. [Google Scholar] [CrossRef] [PubMed]
- Dhar, M.; Wiersema, J.R.; Pourtois, G. Cascade of Neural Events Leading from Error Commission to Subsequent Awareness Revealed Using EEG Source Imaging. PLoS ONE 2011, 6, 12. [Google Scholar] [CrossRef] [PubMed]
- Klein, T.A.; Endrass, T.; Kathmann, N.; Neumann, J.; von Cramon, D.Y.; Ullsperger, M. Neural correlates of error awareness. Neuroimage 2007, 34, 1774–1781. [Google Scholar] [CrossRef]
- Gupta, A.; Agrawal, R.K.; Kirar, J.S.; Andreu-Perez, J.; Ding, W.P.; Lin, C.T.; Prasad, M. On the Utility of Power Spectral Techniques With Feature Selection Techniques for Effective Mental Task Classification in Noninvasive BCI. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1–13. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Averaged False Alarm Rate | Detection Latency (Detection Rate Beyond 90%) | Maximum Detection Rate | Peak Timing |
|---|---|---|---|---|
| 1 | 0.32 ± 0.77% | 324 ± 26.33 ms | 100.00% | 348 ± 28.98 ms |
| 2 | 8.24 ± 6.76% | 326 ± 69.31 ms | 92.00% | 362 ± 25.29 ms |
| 3 | 2.48 ± 2.15% | 296 ± 30.98 ms | 100.00% | 320 ± 24.94 ms |
| 4 | 0.48 ± 0.86% | 312 ± 35.53 ms | 94.00% | 342 ± 23.94 ms |
| 5 | 0.72 ± 2.01% | 338 ± 28.98 ms | 100.00% | 356 ± 38.64 ms |
| 6 | 4.16 ± 5.77% | 344 ± 39.78 ms | 100.00% | 355 ± 34.06 ms |
| 7 | 5.20 ± 6.57% | 316 ± 15.78 ms | 100.00% | 322 ± 10.33 ms |
| 8 | 4.72 ± 2.57% | 334 ± 38.93 ms | 100.00% | 349 ± 15.78 ms |
| 9 | 2.56±2.87% | 316 ± 30.98 ms | 96.00% | 328 ± 30.07 ms |
| 10 | 13.04 ± 6.6% | 278 ± 52.03 ms | 100.00% | 308 ± 50.06 ms |
| 11 | 3.76 ± 2.9% | 282 ± 30.48 ms | 100.00% | 314 ± 38.85 ms |
| 12 | 8.16 ± 4.97% | 330 ± 38.01 ms | 100.00% | 336 ± 34.38 ms |
| 13 | 6.64 ± 3.11% | 320 ± 36.51 ms | 100.00% | 331 ± 18.85 ms |
| 14 | 4.00 ± 2.75% | 316 ± 29.51 ms | 98.00% | 319 ± 25.73 ms |
| 15 | 2.48 ± 2.96% | 284 ± 20.66 ms | 100.00% | 304 ± 18.97 ms |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, S.; Qi, H.; Zhang, J.; Zhang, S.; Xu, R.; Liu, Y.; Meng, L.; Ming, D. A Pilot Study on Falling-Risk Detection Method Based on Postural Perturbation Evoked Potential Features. Sensors 2019, 19, 5554. https://doi.org/10.3390/s19245554
Jiang S, Qi H, Zhang J, Zhang S, Xu R, Liu Y, Meng L, Ming D. A Pilot Study on Falling-Risk Detection Method Based on Postural Perturbation Evoked Potential Features. Sensors. 2019; 19(24):5554. https://doi.org/10.3390/s19245554
Chicago/Turabian StyleJiang, Shenglong, Hongzhi Qi, Jie Zhang, Shufeng Zhang, Rui Xu, Yuan Liu, Lin Meng, and Dong Ming. 2019. "A Pilot Study on Falling-Risk Detection Method Based on Postural Perturbation Evoked Potential Features" Sensors 19, no. 24: 5554. https://doi.org/10.3390/s19245554
APA StyleJiang, S., Qi, H., Zhang, J., Zhang, S., Xu, R., Liu, Y., Meng, L., & Ming, D. (2019). A Pilot Study on Falling-Risk Detection Method Based on Postural Perturbation Evoked Potential Features. Sensors, 19(24), 5554. https://doi.org/10.3390/s19245554