The Implementation of a Low Power Environmental Monitoring and Soil Moisture Measurement System Based on UHF RFID


Abstract
1. Introduction
2. The Measurement System
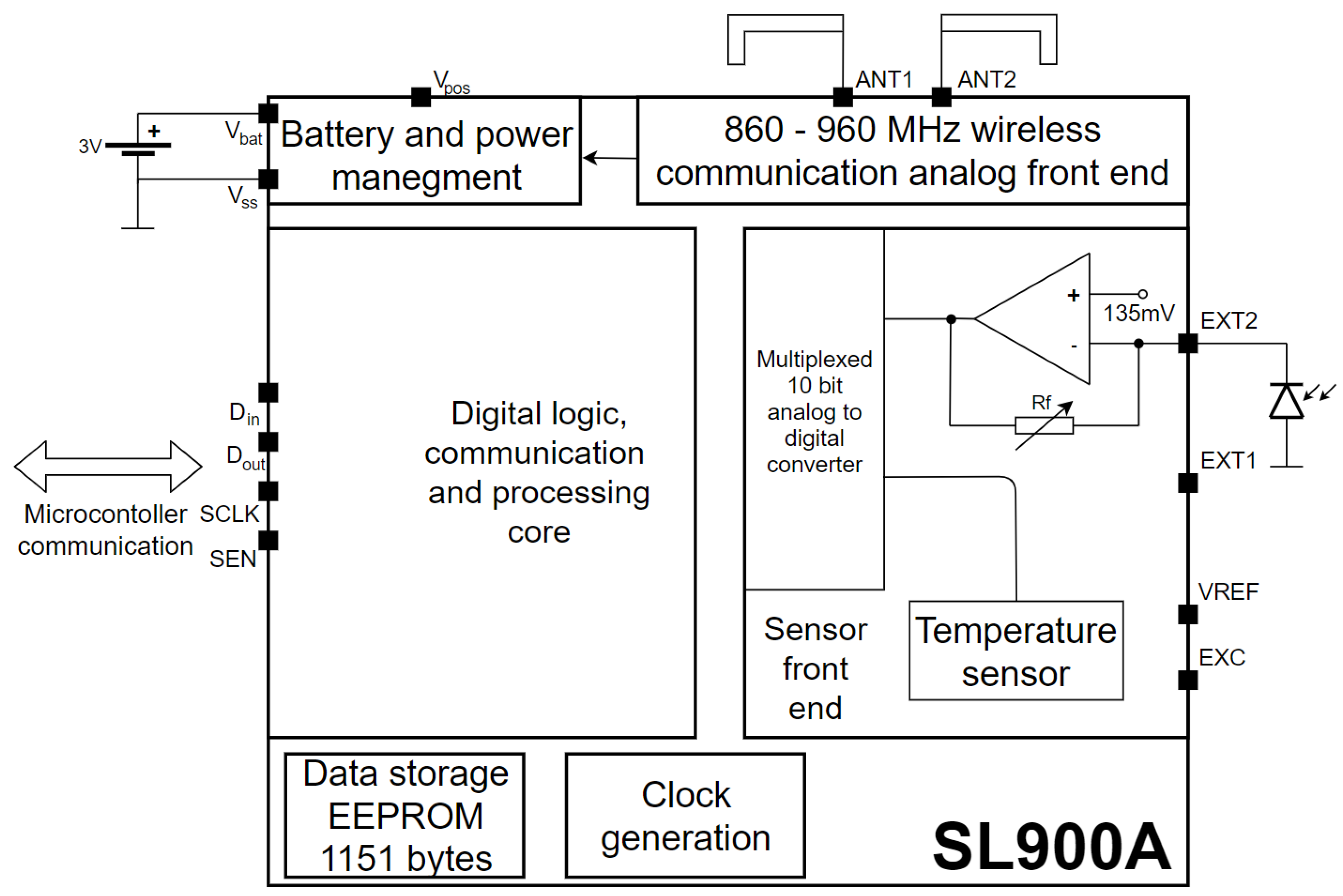
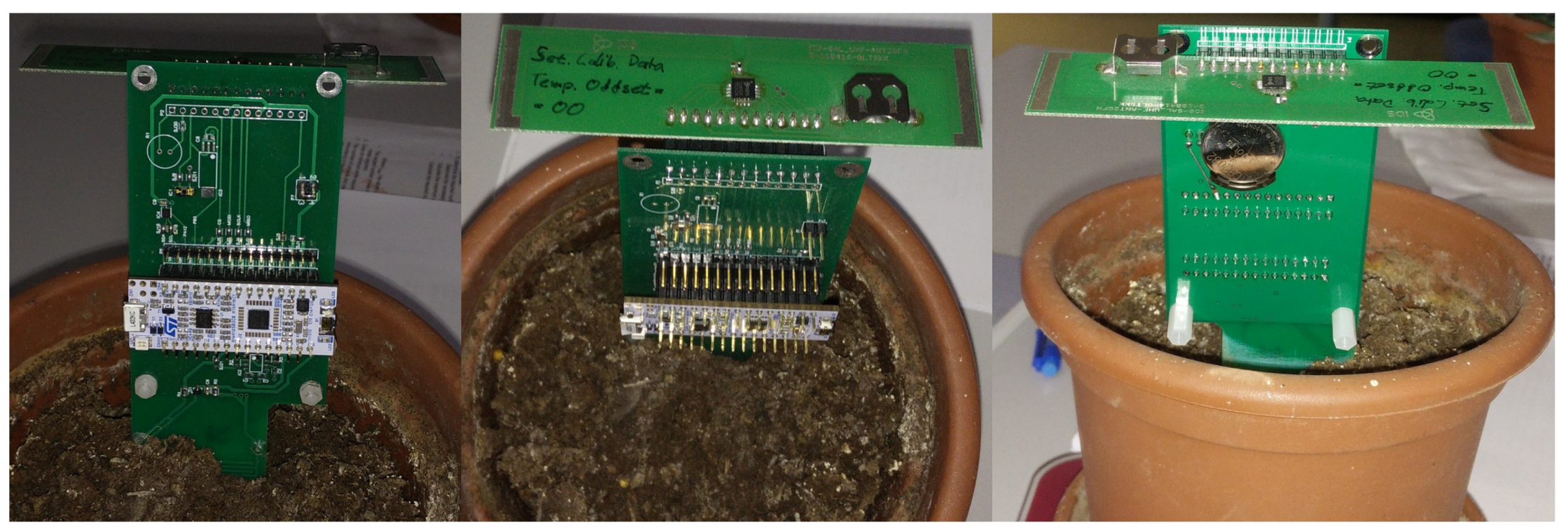
2.1. System Description
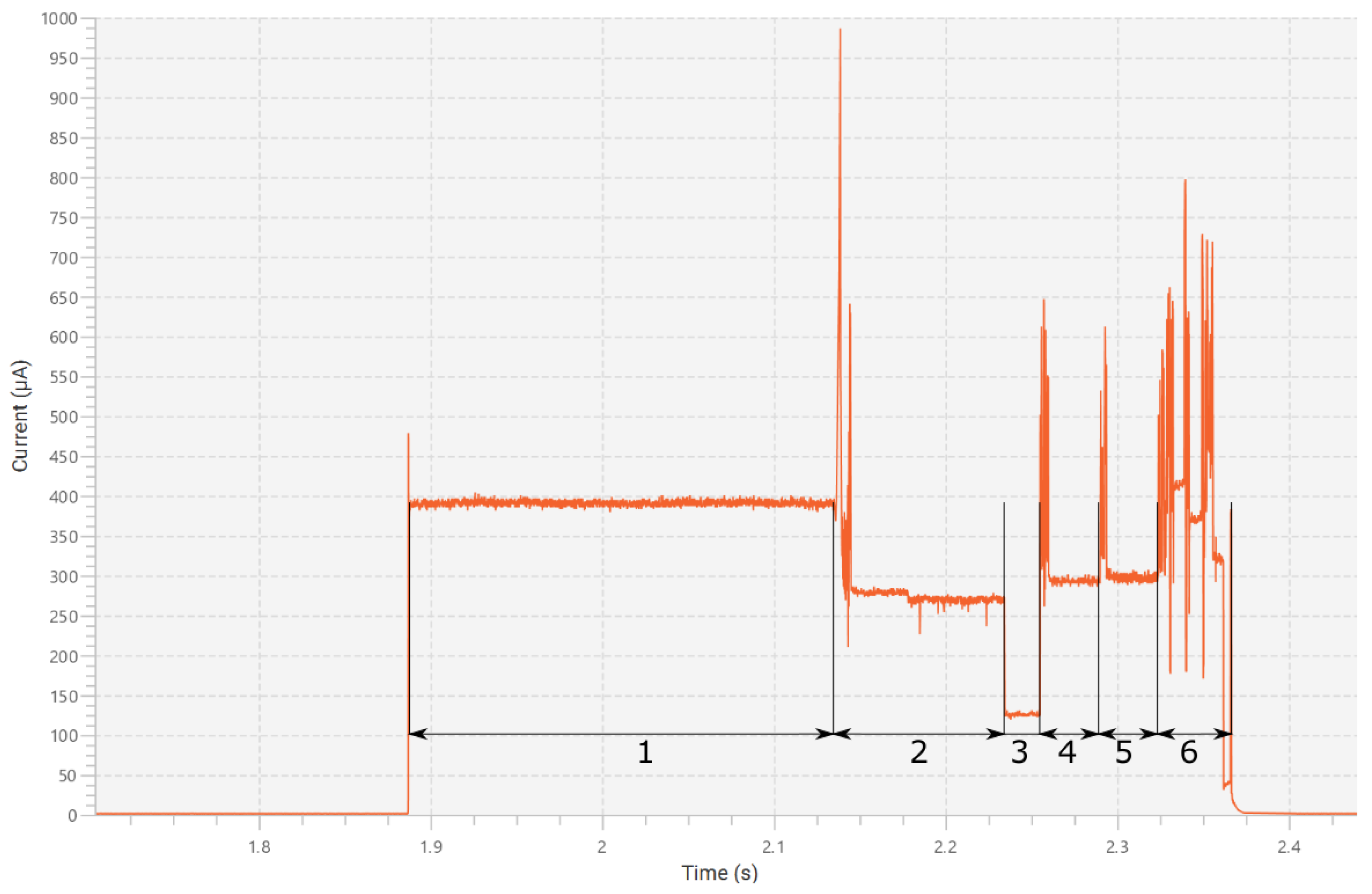
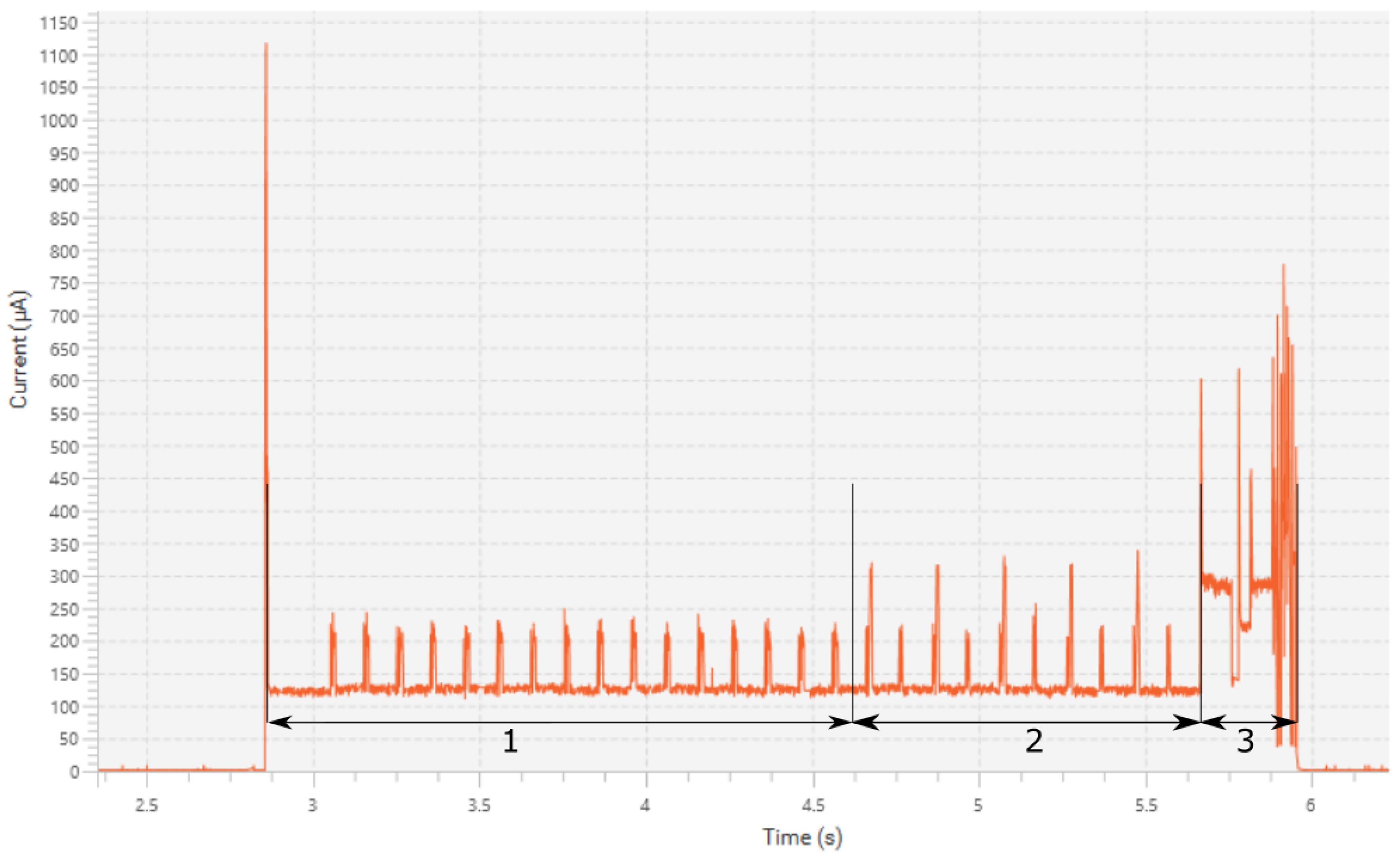
2.2. System Power Consumption
3. Capacitive Soil Moisture Measurement Solution
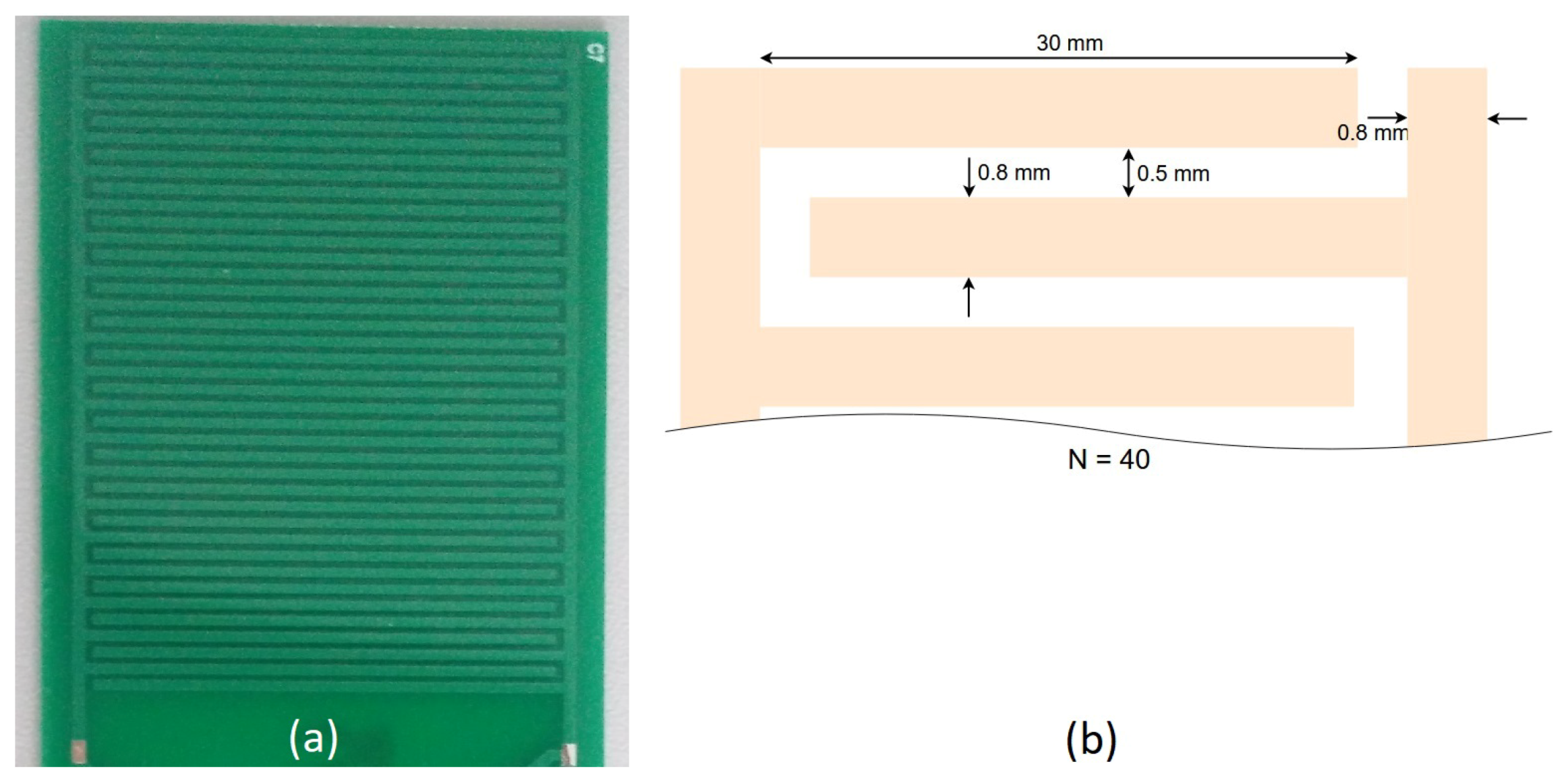
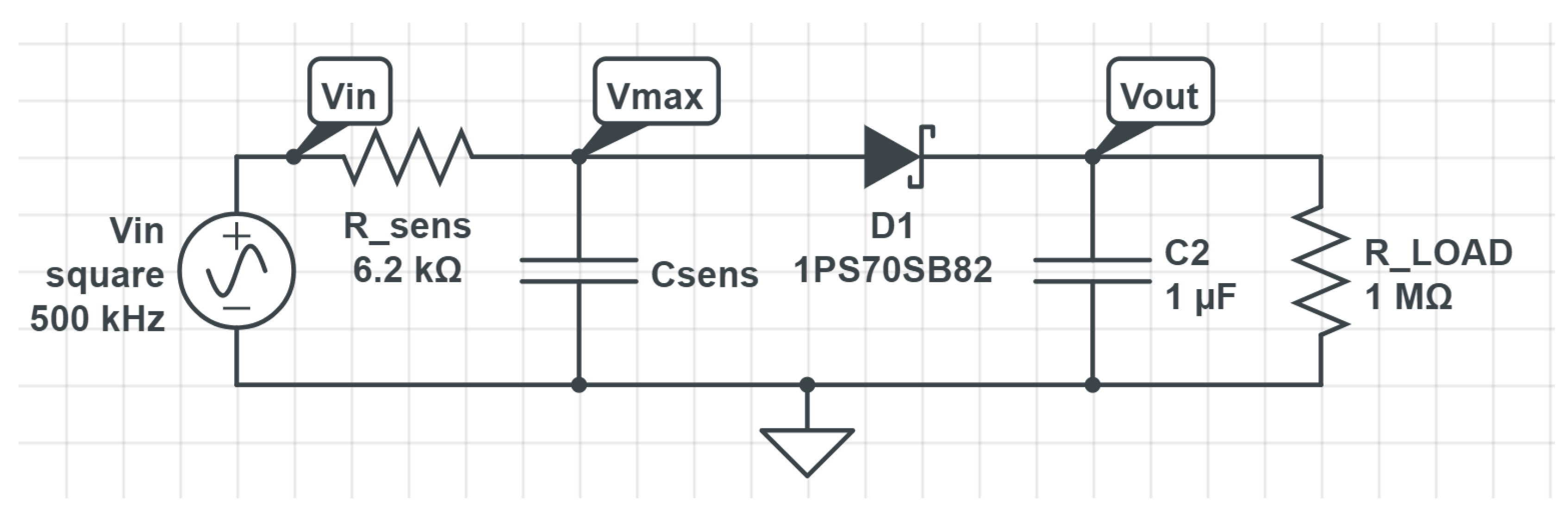
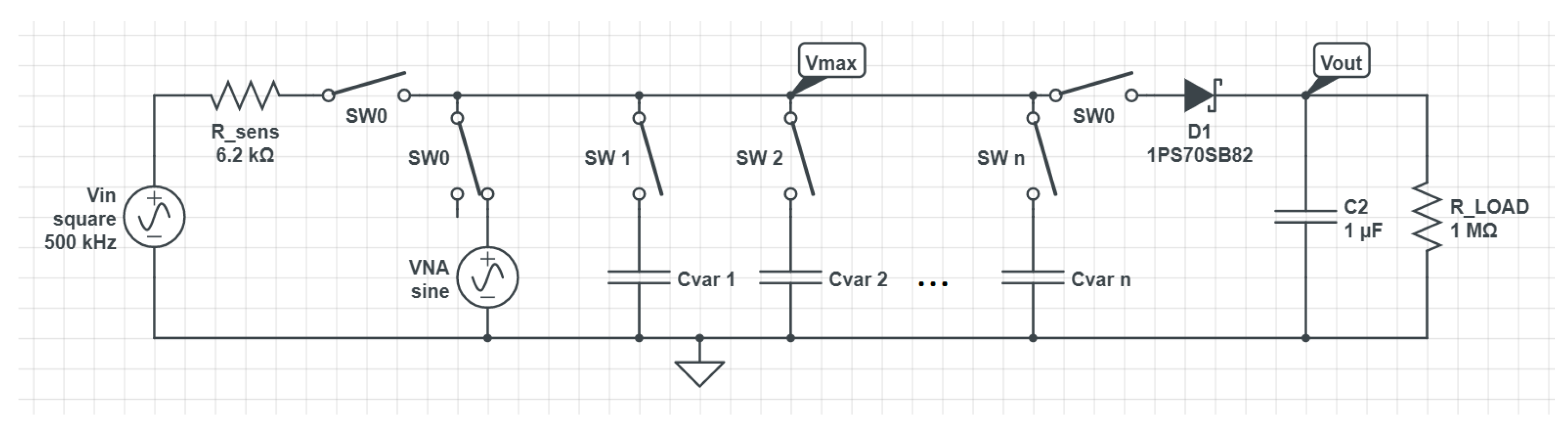
3.1. Capacitive Sensor Model
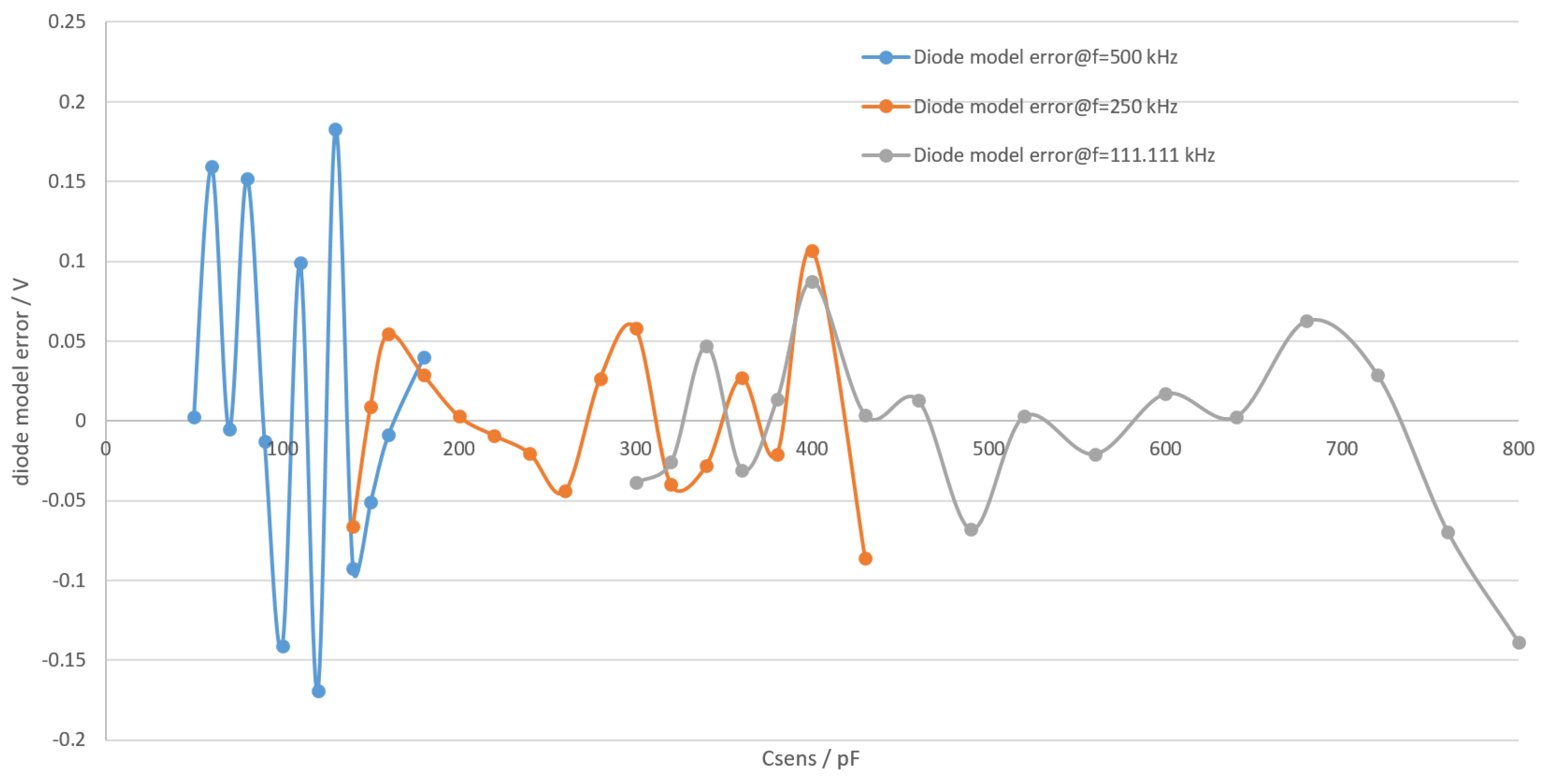
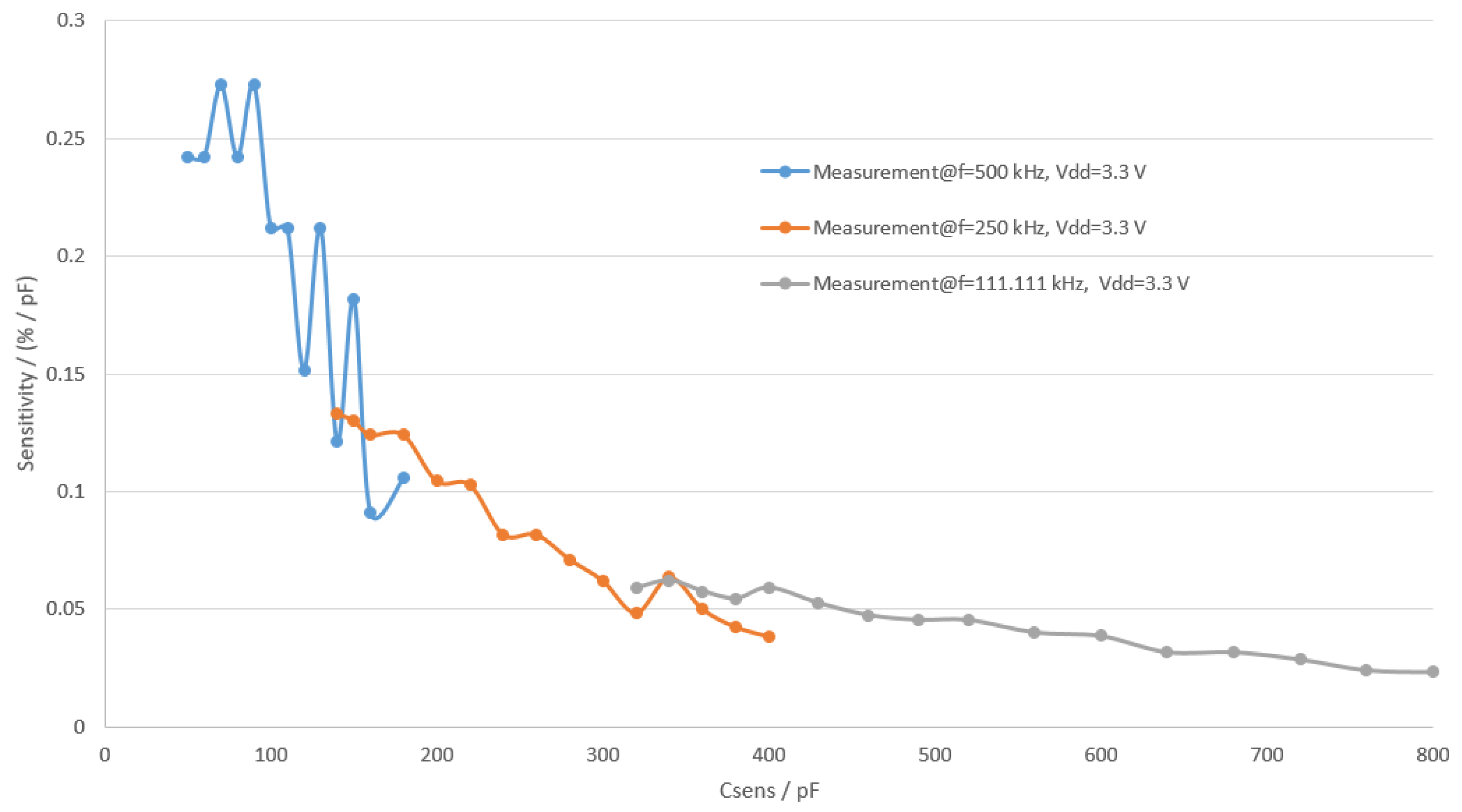
3.2. Sensor Front End Characterization
4. Measurements and Results Analysis
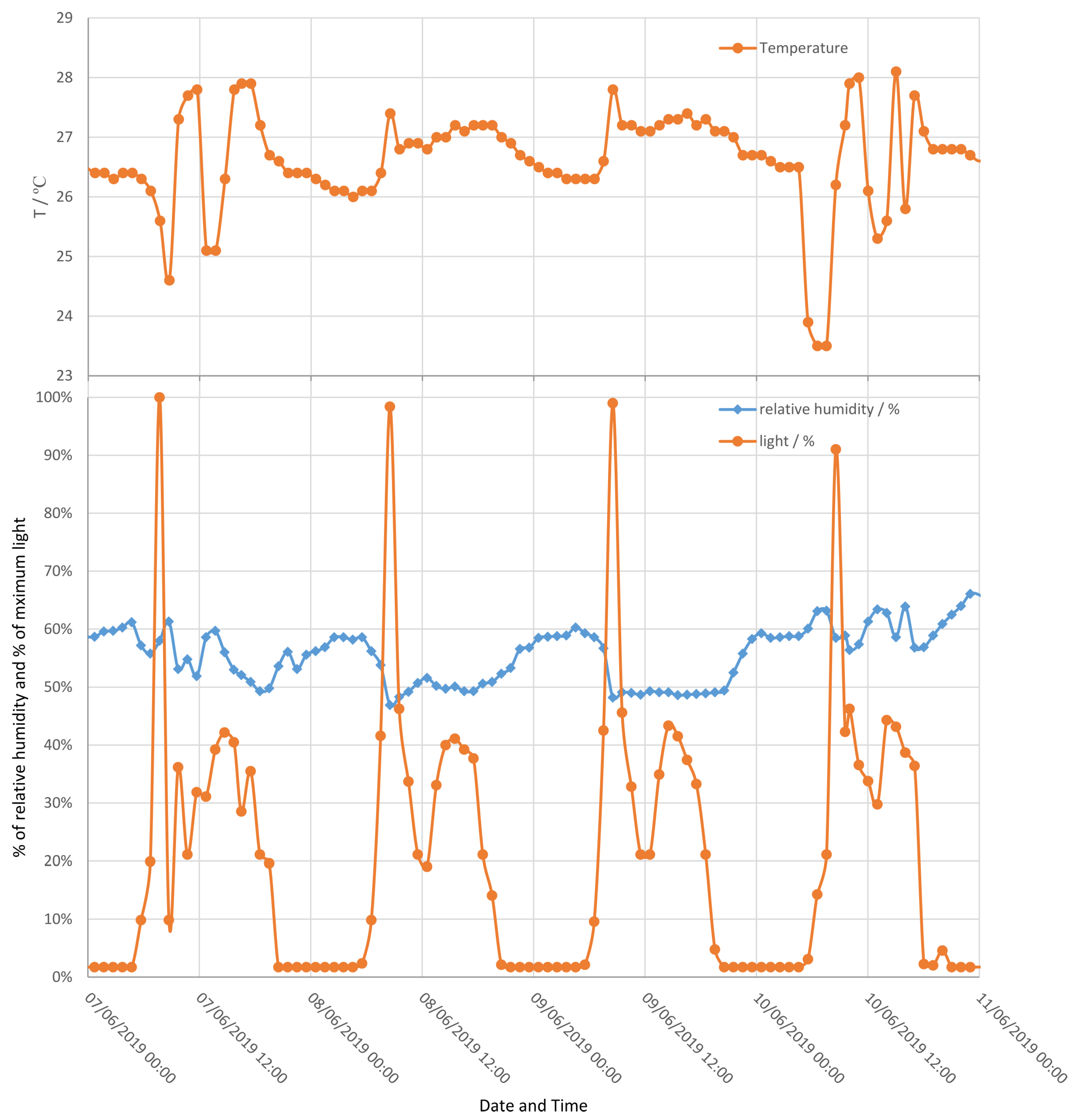
4.1. Environmental Parameter Measurements
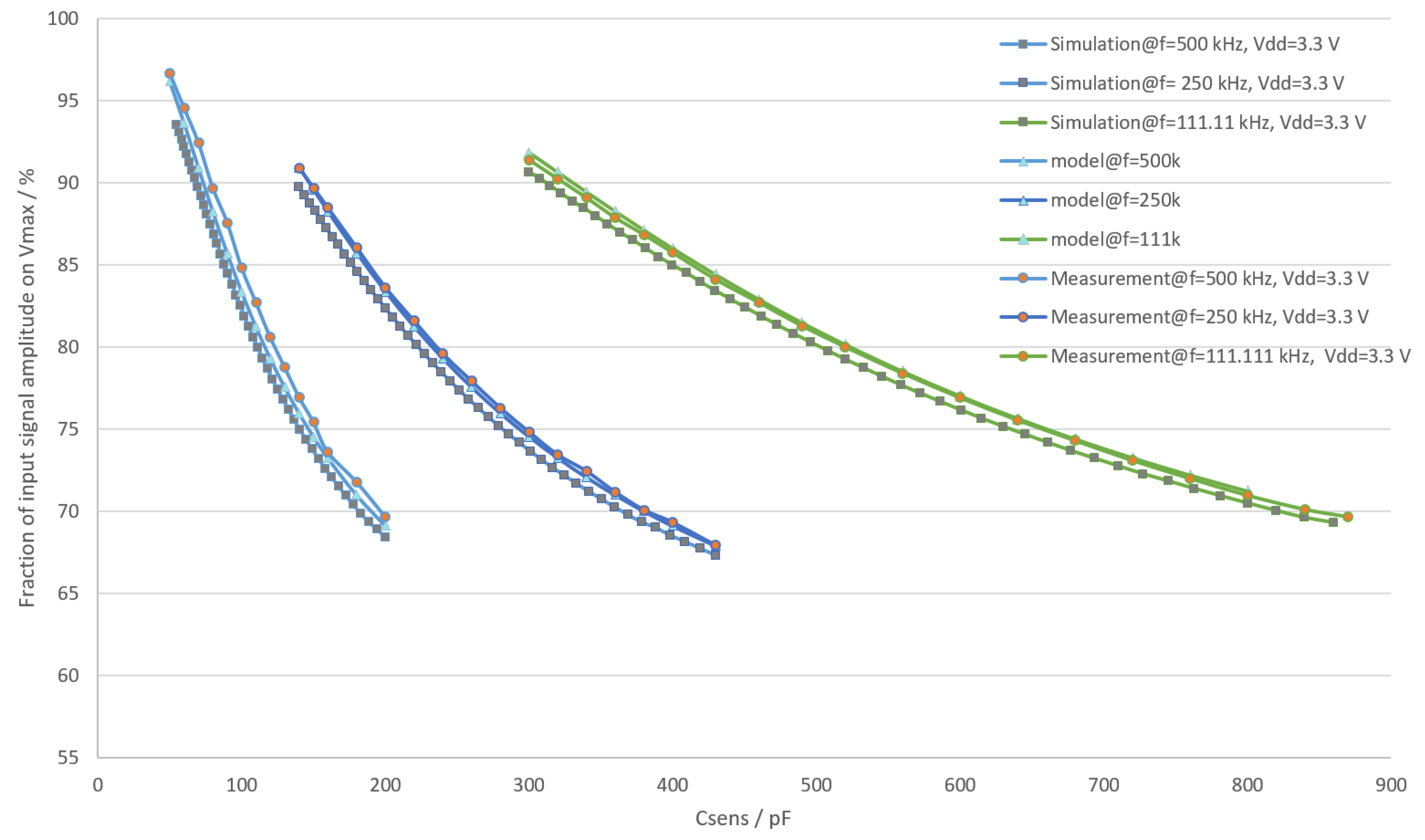
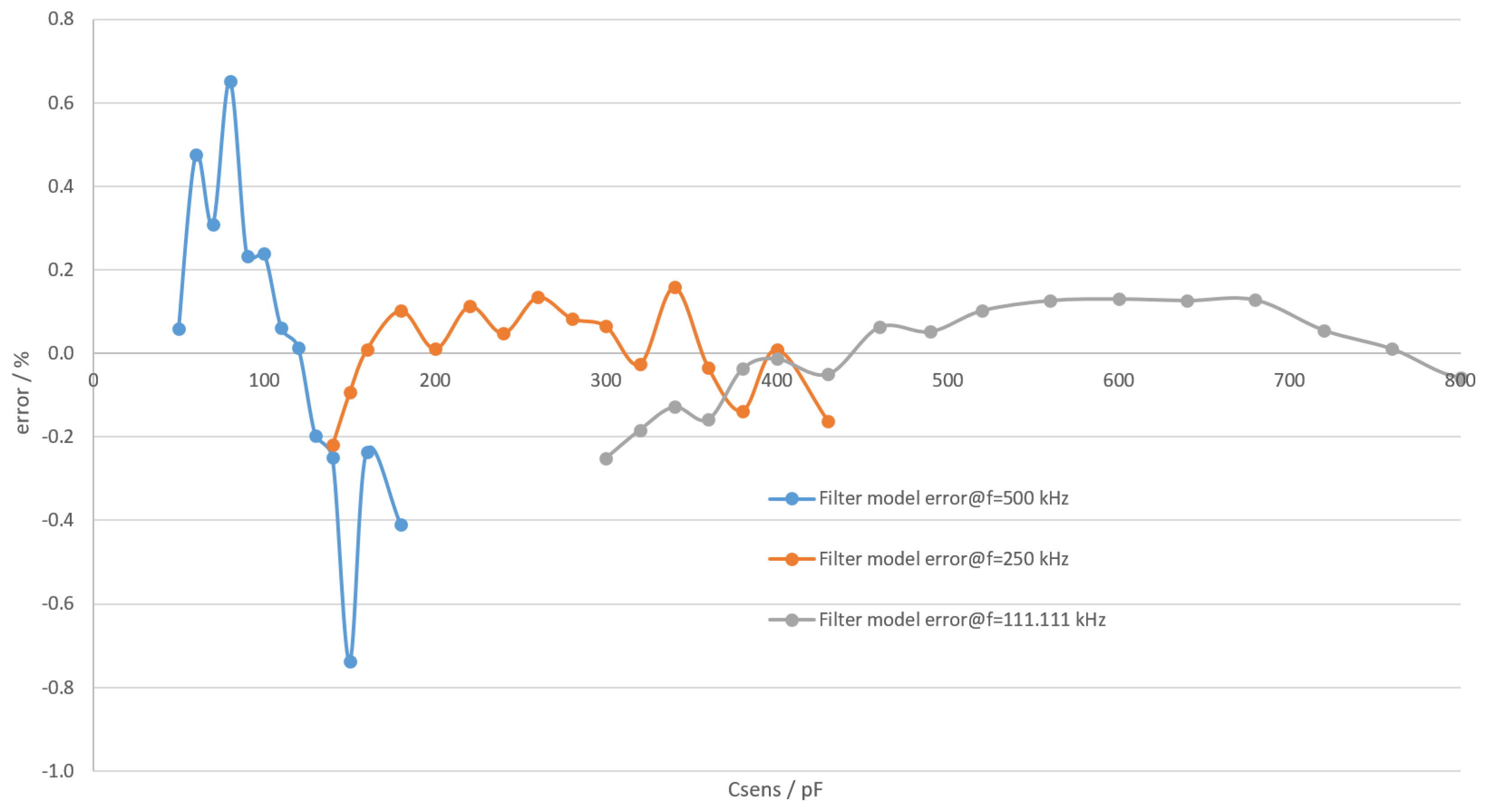
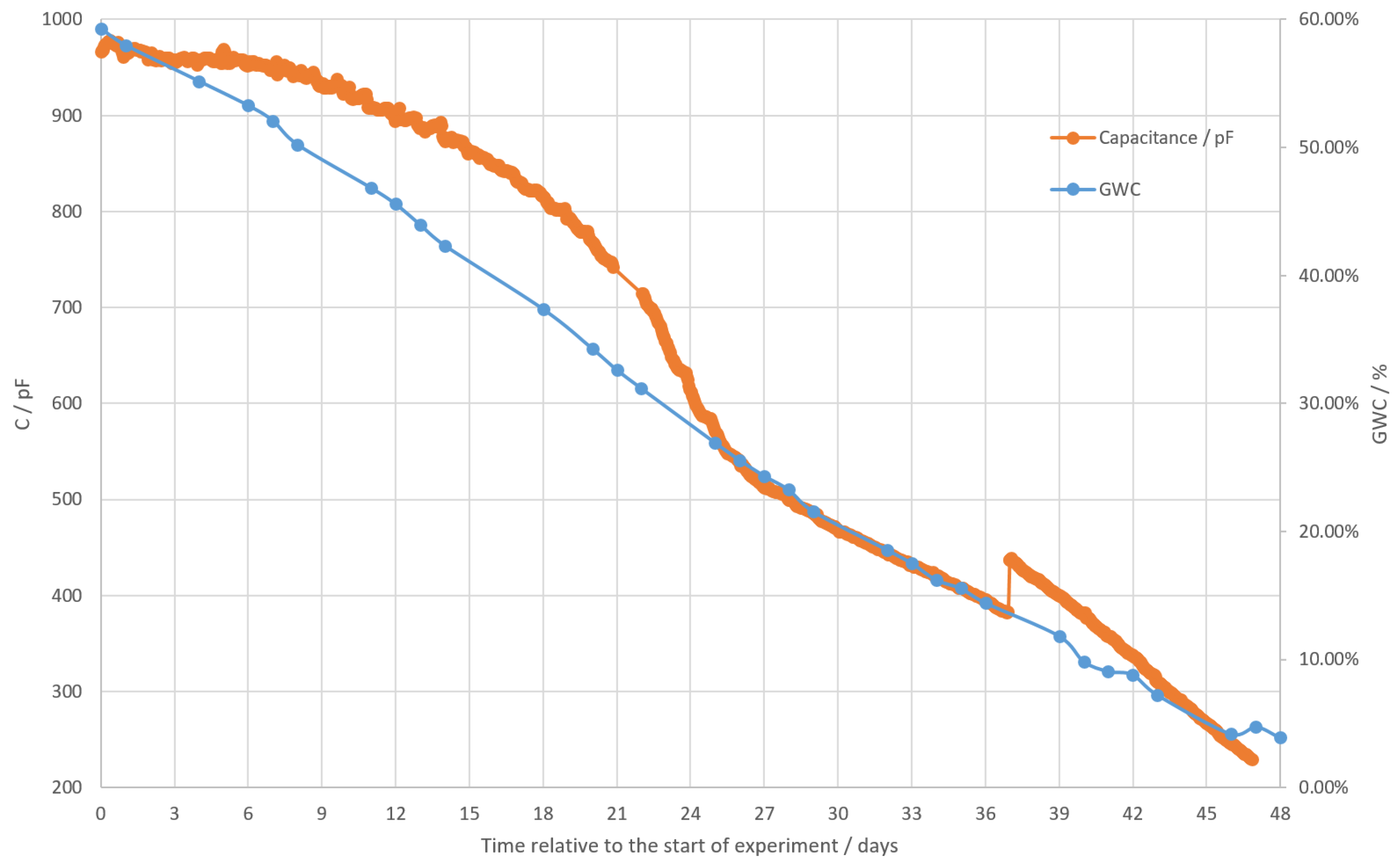
4.2. Capacitance and GWC Measurements
4.3. Comparison with Previous Works
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosystems Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Ruiz-Garcia, L.; Lunadei, L. The role of RFID in agriculture: Applications, limitations, and challenges. Comput. Electron. Agric. 2011, 79, 42–50. [Google Scholar] [CrossRef]
- Parreńo-Marchante, A.; Alvarez-Melcon, A.; Trebar, M.; Filippin, P. Advanced traceability system in aquaculture supply chain. J. Food Eng. 2014, 122, 99–109. [Google Scholar] [CrossRef]
- Muralidhara, B.L.; Geethanjali, B. A Review on different technologies used in Agriculture. Available online: https://acadpubl.eu/hub/2018-119-16/2/435.pdf (accessed on 10 September 2019).
- Boada, M.; Lázaro, A.; Villarino, R.; Girbau, D. Battery-Less Soil Moisture Measurement System Based on a NFC Device With Energy Harvesting Capability. IEEE Sens. J. 2018, 18, 5541–5549. [Google Scholar] [CrossRef]
- Pichorim, S.F.; Gomes, N.J.; Batchelor, J.C. Two Solutions of Soil Moisture Sensing with RFID for Landslide Monitoring. Sensors 2018, 18, 452. [Google Scholar] [CrossRef] [PubMed]
- Svete, T.; Suhadolnik, N.; Pleteršek, A. The Implementation of a High-Frequency Radio Frequency Identification System with a Battery-Free Smart Tag for Orientation Monitoring. Electronics 2017, 6, 6. [Google Scholar] [CrossRef]
- GAO RFID. Product Overview UHF Gen 2 EPC 4-port RFID Reader 236031. Available online: https://gaorfid.com/RFID-brochures/UHF_Gen_2_EPC_4-port_RFID_Reader_236031.pdf (accessed on 21 October 2019).
- GAO RFID. Product Overview Android Based UHF Gen 2 RFID Handheld Data Terminal 246029. Available online: https://gaorfid.com/RFID-brochures/GAORFID%20246029.pdf (accessed on 21 October 2019).
- AMS. SL900A EPC Class 3 Sensory Tag Chip - For Automatic Data Logging Datasheet. Available online: http://ams.com/documents/20143/36005/SL900A_DS000294_5-00.pdf/ d399f354-b0b6-146f-6e98-b124826bd737 (accessed on 10 September 2019).
- EPCglobal. EPC™Radio-Frequency Identity Protocols Class-1 Generation-2 UHF RFID Protocol for Communications at 860 MHz–960 MHz Version 1.1.0. Available online: https://www.gs1.org/sites/default/files/docs/epc/uhfc1g2_1_1_0-standard-20071017.pdf (accessed on 21 October 2019).
- STMicroelectronics. Ultra-low-power Arm® Cortex®-M4 32-bit MCU+FPU, 100DMIPS, up to 256KB Flash, 64KB SRAM, USB FS, analog, audio Datasheet. Available online: https://www.st.com/resource/en/datasheet/stm32l432kc.pdf (accessed on 15 September 2019).
- Bourns. BPS230 Series - 2 mm Humidity Sensor Datasheet. Available online: https://www.bourns.com/docs/product-datasheets/bps230.pdf (accessed on 26 September 2019).
- Vishay. Ambient Light Sensor in 0805 Package Datasheet. Available online: https://www.vishay.com/docs/81317/temt6200.pdf (accessed on 10 October 2019).
- STMicroelectronics. STM32 Nucleo expansion board for power consumption measurement Databrief. Available online: https://www.st.com/resource/en/data_brief/x-nucleo-lpm01a.pdf (accessed on 10 October 2019).
- ENERGIZER. CR2032 PRODUCT DATASHEET. Available online: http://data.energizer.com/pdfs/cr2032.pdf (accessed on 10 October 2019).
- Keysight (Agilent). E5071C ENA Vector Network Analyzer. Available online: https://www.keysight.com/en/pdx-x202270-pn-E5071C/ena-vector-network-analyzer ?pm=spc&nid=-32496.1150429&cc=HR&lc=eng (accessed on 21 October 2019).
- Keysight. DSOX3034T Oscilloscope: 350 MHz, 4 Analog Channels. Available online: https://www.keysight.com/en/pdx-x202175-pn-DSOX3034T/oscilloscope-350-mhz-4-analog-channels? cc=US&lc=eng (accessed on 21 October 2019).
- Cadence. Spectre Simulation Platform. Available online: https://www.cadence.com/content/cadence-www/ global/en_US/ home/tools/custom-ic-analog-rf-design/circuit-simulation/spectre-simulation-platform.html (accessed on 21 October 2019).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Model Number | A | B |
|---|---|---|---|
| 500 kHz | 1 | 0.366 | −0.00199 |
| 500 kHz | 2 | 0.150 | 0.00076 |
| 250 kHz | 1 | 0.295 | −0.00114 |
| 250 kHz | 2 | 0.109 | 0.00142 |
| 111.11 kHz | 1 | 0.243 | −0.00046 |
| 111.11 kHz | 2 | 0.153 | 0.00071 |
| Parameter | This Work | [5] | [6] 2nd Solution |
|---|---|---|---|
| Carrier frequency | 860–960 MHz | 13.56 MHz | 860–960 MHz |
| Protocol | EPC Gen2 | ISO 15693 | EPC Gen2 |
| Power consumption | 340 µA @ 3.3 V | 1240 µA @ 3.3 V | 180 µA @ 3 V |
| Max. error | <0.8% @ 50–950 pF | <2% @ 50–270 pF | <5.15 % @ 15–88 pF |
| Active / Passive | semi active | passive | passive |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korošak, Ž.; Suhadolnik, N.; Pleteršek, A. The Implementation of a Low Power Environmental Monitoring and Soil Moisture Measurement System Based on UHF RFID. Sensors 2019, 19, 5527. https://doi.org/10.3390/s19245527
Korošak Ž, Suhadolnik N, Pleteršek A. The Implementation of a Low Power Environmental Monitoring and Soil Moisture Measurement System Based on UHF RFID. Sensors. 2019; 19(24):5527. https://doi.org/10.3390/s19245527
Chicago/Turabian StyleKorošak, Žiga, Nejc Suhadolnik, and Anton Pleteršek. 2019. "The Implementation of a Low Power Environmental Monitoring and Soil Moisture Measurement System Based on UHF RFID" Sensors 19, no. 24: 5527. https://doi.org/10.3390/s19245527
APA StyleKorošak, Ž., Suhadolnik, N., & Pleteršek, A. (2019). The Implementation of a Low Power Environmental Monitoring and Soil Moisture Measurement System Based on UHF RFID. Sensors, 19(24), 5527. https://doi.org/10.3390/s19245527