1. Introduction
Infrared focal plane array (IRFPA) sensors are commonly used in military and civilian applications such as disaster assessment, security monitoring [
1], medical treatment, forest fire prevention, national defense [
2], etc. Influenced by factors such as sensor fabrication process, IRFPA often receives serious non-uniform noise, which affects the imaging quality of the system [
3]. In addition, this bottleneck problem restricts the infrared detection system [
4]. The non-uniformity of an IRFPA is also called fixed pattern noise (FPN). To solve this problem, various NUC techniques [
5,
6,
7,
8] have been proposed to improve the quality of images produced.
NUC methods are mainly divided into two categories: calibration-based correction methods (CBNUC) [
9] and scene-based correction methods (SBNUC) [
10]. Calibration-based methods mainly include single-point correction [
11] and two-point correction [
12]. Both methods are based on a linear model and require less computation. The most commonly used two-point method in engineering only needs one multiplication and one addition to realize real-time non-uniformity correction. This method calculates the gain and offset coefficients by using the blackbody responses at two different temperatures. However, when the calibrated temperature is far from the reference temperature point, the correction error increases gradually. In addition, CBNUC cannot solve the problem of radiation response drift; thus, it has to be repeated by inserting a uniform radiation source into the view, which affects the quality of images produced.
To address the above disadvantage, many SBNUC methods were proposed [
13,
14]. The SBNUC methods can adaptively alleviate FPN fluctuation by using scenario information without a uniform radiation source. Therefore, the scene-based method can correct the optical system, and update the gain and offset coefficient in real-time so as to solve the problem of radiation drift. Current SBNUC methods can be divided into three main approaches: the statistical methods [
15], the registration methods [
16], and the neural network methods [
17].
Statistical methods can make good use of the spatial information from the focal plane of each detector, and then fine tune the gain and offset to achieve NUC. The LMS (Least mean square) method [
18] proposed by Hayat is based on the linear model; the gain and offset are estimated by an infinite impulse response (FIR) filter, and are then adaptively updated via a Wiener filter. However, it is easy to generate ghosts when the scene changes slightly. Geng proposed a correction method for interpolation statistics of adjacent pixels [
19]. In this method, the non-uniformity of focal plane is modeled as horizontal and vertical non-uniformity, the correction coefficients are estimated separately, and then the final correction coefficients are synthesized. The disadvantage of this method is that pre-calibration based on blackbody method is needed, and a slight ghost residual remains. These methods can correct the images in relatively quickly and have small storage demands.
Compared with statistical methods, registration-based correction method is more reasonable and converges more quickly [
20]. This method assumes that the response of each pixel in the same scene is relatively consistent within several adjacent frame intervals. Zuo proposed an interframe least mean square (IRLMS) method [
21] and utilized a phase-correlation method for motion estimation. The images produced have almost no ghosting artifacts. However, the registration-based methods are not practical enough due to their high computational complexity and large storage demands, because they need many pictures to achieve good performance.
In addition, the neural network-based SBNUC methods receive extensive attention because they not require high linearity and stability of detector coefficients. Hardie [
22] proposed a deghosting method based on a temporal gate in the neural network; by gating the update coefficients, the accumulation of incident radiation estimation errors during long motion paused is avoided. This method has been widely studied due to its good performance. However, this kind of methods require a large amount of research work and computation in application, which means it is hardly used in high real time situation.
Based on the analysis of the advantages and disadvantages of existing methods, this paper proposes a hybrid correction method based on both statistics and registration. We use the statistical method to get gain coefficients and then use these gain coefficients as the initial values for registration methods to obtain offset coefficients more rapidly and accurately. In this way, both the spatial information between pixels and temporal motion estimation are considered in the process of non-uniform correction. Specifically, a block-based correction method based on statistical consistency of adjacent pixels is used to obtain gain coefficients and a registration method utilizing the phase-correlation algorithm that minimizes the mean square error between two properly aligned images is used to obtain the offset coefficient.
This paper is organized as follows. The related work is introduced in
Section 2.
Section 3 presents the detailed analysis of the proposed correction algorithm. Experimental results and comparative study of related methods are presented in
Section 4. It is worth mentioning that different methods were tested on the real infrared sequences collected by ourselves. The experimental results show the superiority of our proposed method. Finally, the conclusion is presented in
Section 5.
3. Proposed Method
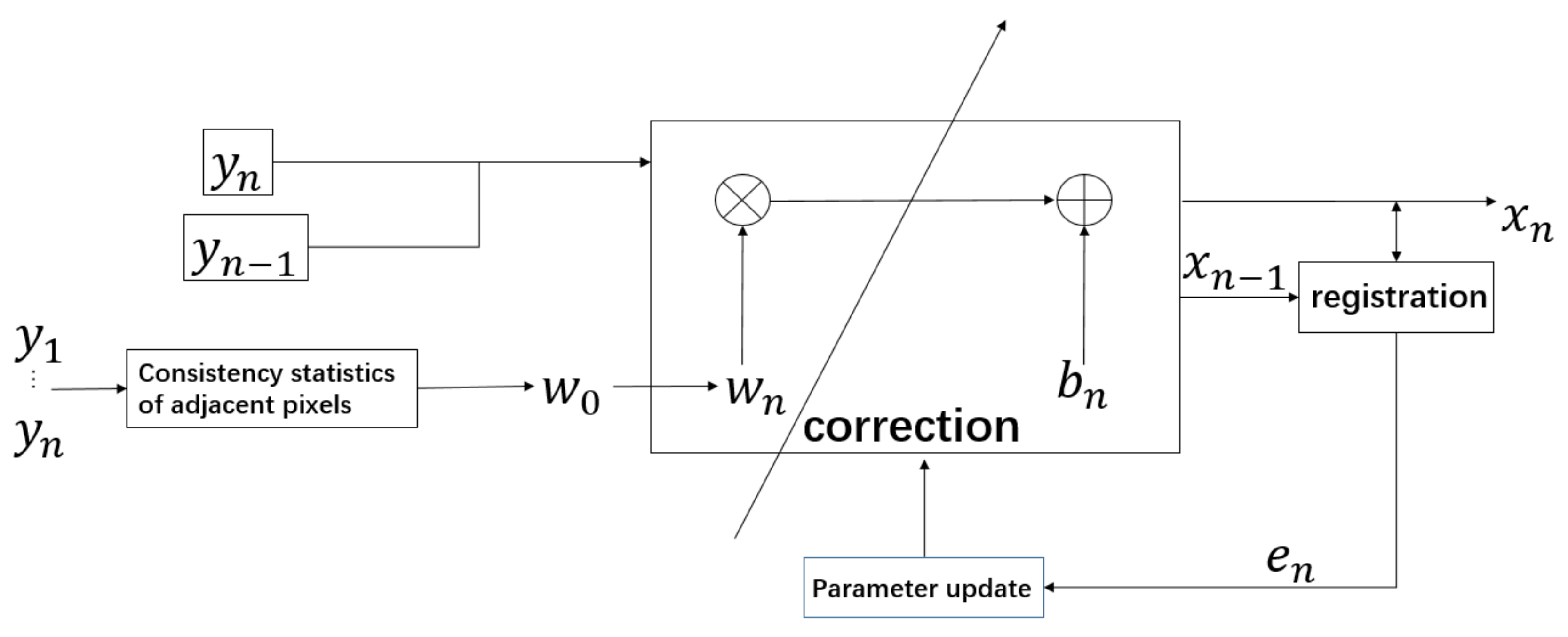
In the registration-based method, there is usually no research on the initial value of parameters, and the results of NUC mainly depend on the effectiveness of the registration. The statistical method’s purpose is to obtain the gain coefficient; it only processes the spatial information of single image, ignoring the sequential information between frames. Therefore, our paper innovatively combines registration-based and statistical correction-based methods together. The overview of our algorithm is presented in
Figure 1.
In the registration-based correction methods, the initial values of gain and offset coefficients are important for iterative convergence. Therefore, setting an optimal initial correction coefficient is the key factor for obtaining the result. If the coefficients can be set as appropriate values before iteration, the time for iteration would be shortened and the convergence value would be more accurate. In the method of IRLMS, the initial gain is set as an all-one matrix and the initial offset is set as an all-zero matrix. Different from this, our approach generates the initial gain coefficient by a modular pixel consistency method for the registration-based NUC method.
3.1. Modular Pixel Consistency Correction Method
The modular-based pixel consistency NUC method is mainly used to obtain the initial gain coefficient by analyzing the spatial relationship between pixels. Different from the previous methods, we utilize the statistical correction method in modules. It not only calculates the pixels of the whole image, but also divides the image into four blocks according to the center point for spatial information computation. This method is more reasonable and meticulous and can make full use of the spatial relationship between pixels. The details of the method are as follows.
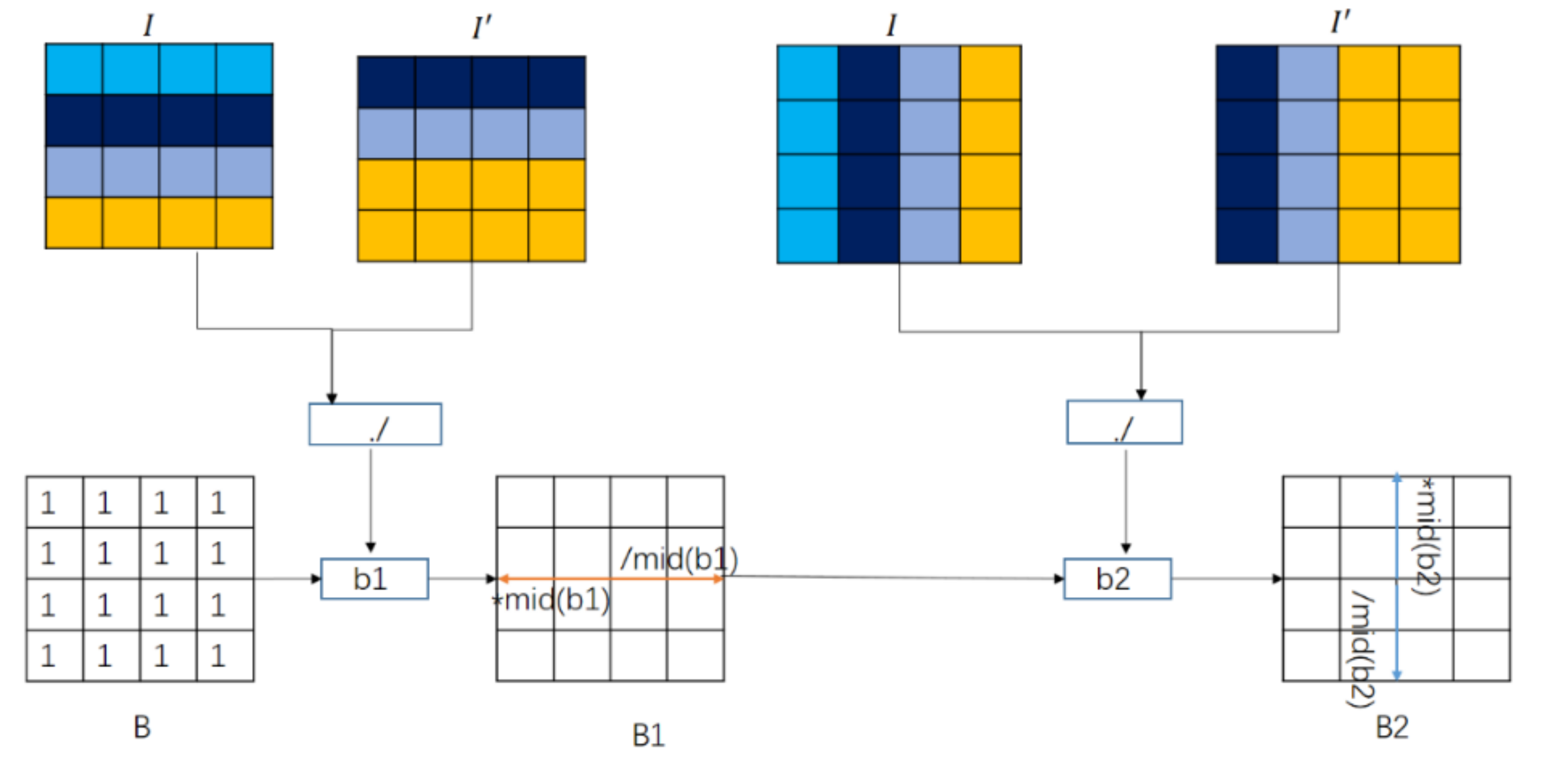
The calculation of the pixels in the whole image is shown in
Figure 2. In the vertical direction, the method first translates the original image one line upward, and then copies the original pixel value in the last line to get a new image
. It then divides the original image and the new image point by point to get the coefficient
, which represents the similarity ratio between the current pixel and its neighbor pixel. Assuming that the initial value of gain
is an all-one matrix, taking the center point as the reference point, all pixels on its left are multiplied by the median value of
, and all pixels on its right are divided by the median value of
, and thus the gain
is obtained. The same operation is performed in the horizontal direction to get the similarity ratio
between adjacent pixels, and then
is obtained with
and
. All the pixels above the center point are multiplied by the median of
, and then all pixels below the center point are divided by the median of
.
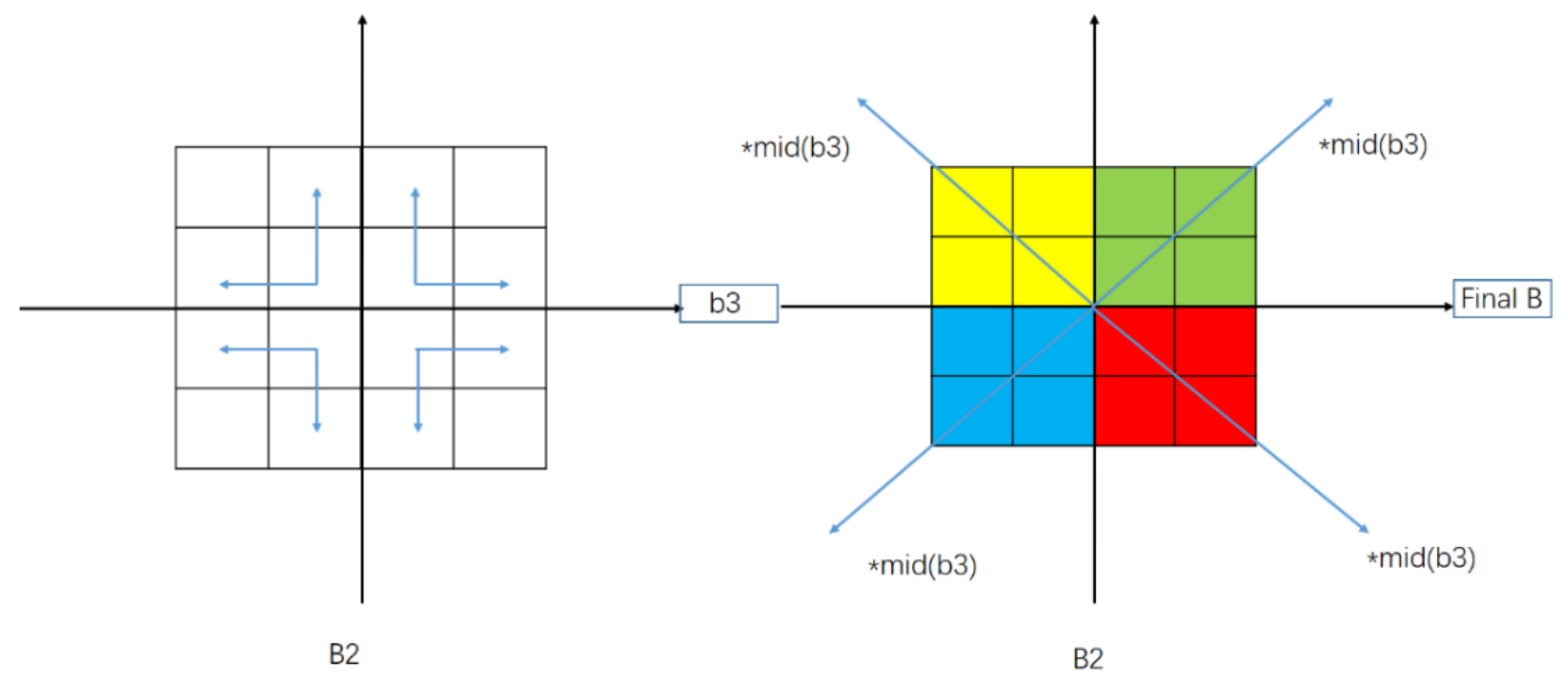
The calculation between adjacent pixels in modules is shown in
Figure 3. In this part, the whole image is divided into four blocks based on the center point, and the operations shown in
Figure 2 are performed on each block. Then, the similarity ratios of four adjacent pixels are combined to get
. From the center point, the median value of
is multiplied by the top-left, bottom-left, top-right, and bottom-right, respectively. Finally, the gain correction coefficient
is obtained.
3.2. Interframe Registration NUC with Statistical Gain
Apart from considering the spatial information, we also integrate the interframe registration NUC method into our approach. The gain coefficient obtained as shown in
Section 3.1 is set as the initial value of the inter-frame registration NUC method, which can increase the speed and accuracy of the convergence.
Since the application of this paper is long range sky background and the optical focal length is relatively long, the images used in the correction method have little high frequency information. Thus, phase correlation [
24] is used to detect the relative displacement between two images with the same content. In the registration NUC approach, the phase correlation is utilized for motion estimation, while cross correlation is used for subpixel image registration.
Firstly, the two inter frame images
and
need to be converted into the Fourier domain,
and
, thus the correlation between frames can be calculate as
where the parameter
can be seen as a map representing the correlation information between frames. Using
, we can confirm whether the image pair is valid or not,
If the peak of the map
is greater than the mean of
, we consider this pair of frames as a valid pair and a registration is to be done. The location of the peak of
is found as
for motion estimation, and then the super pixel registration accuracy is refined in a 5 × 5 window,
which builds a phase correlation mask. The mask is multiplied by the image
to obtain the registered image
.
is converted from the Fourier domain back to sequential domain as
. Finally, the objective error could be built as
Then, Equations (8) and (9) are used to iteratively converge to the optimal gain and offset coefficients to achieve NUC. Unlike the usual iterations, the initial gain is estimated in advance by the pixel consistency strategy, which could effectively improve the NUC performance.
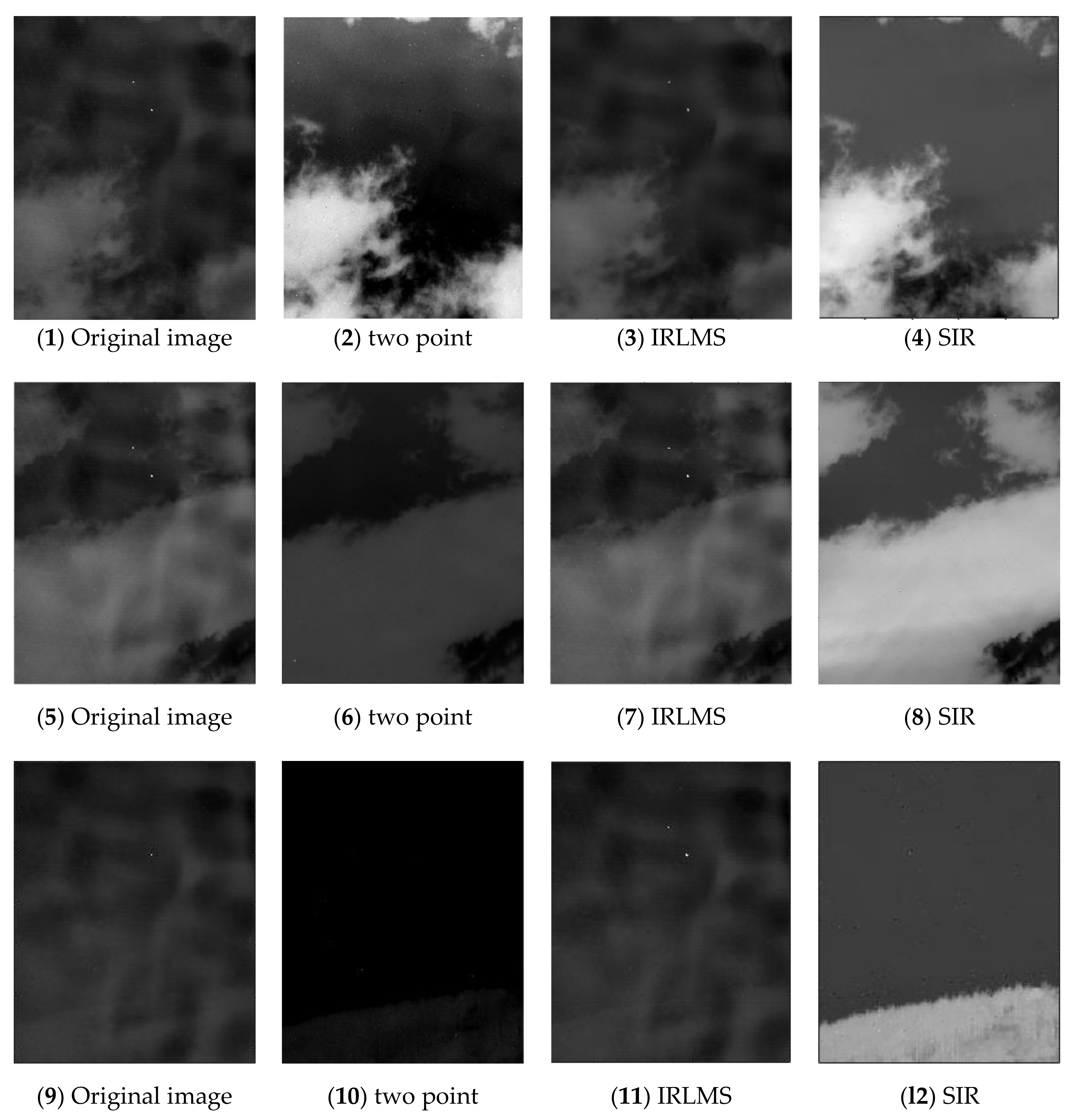
4. Experimental Results and Comparative Study of Related Methods
In this section, the proposed SIR method is compared with two representative NUC techniques: two-point NUC method [
12] and IRLMS method [
20]. The two-point method is simple but effective. It is one of the most widely used correction methods in engineering; it could always generate excellent correction images. In addition, IRLMS is a representative registration-based correction method at present. Our method is proposed on the basis of this method, but achieves better correction performance. The detailed features of the tested IR system are given in
Table 1.
4.1. Evaluation
It is known that reducing the standard deviation of the image can improve the signal-to-noise ratio of the target and provide help for detection, by reducing false alarms or detecting longer distances. Thus, the global and local mean standard deviations were used to quantitatively evaluate the NUC performance on real infrared sequences. We tested the represented approach and our approach on three real infrared sequences collected by ourselves.
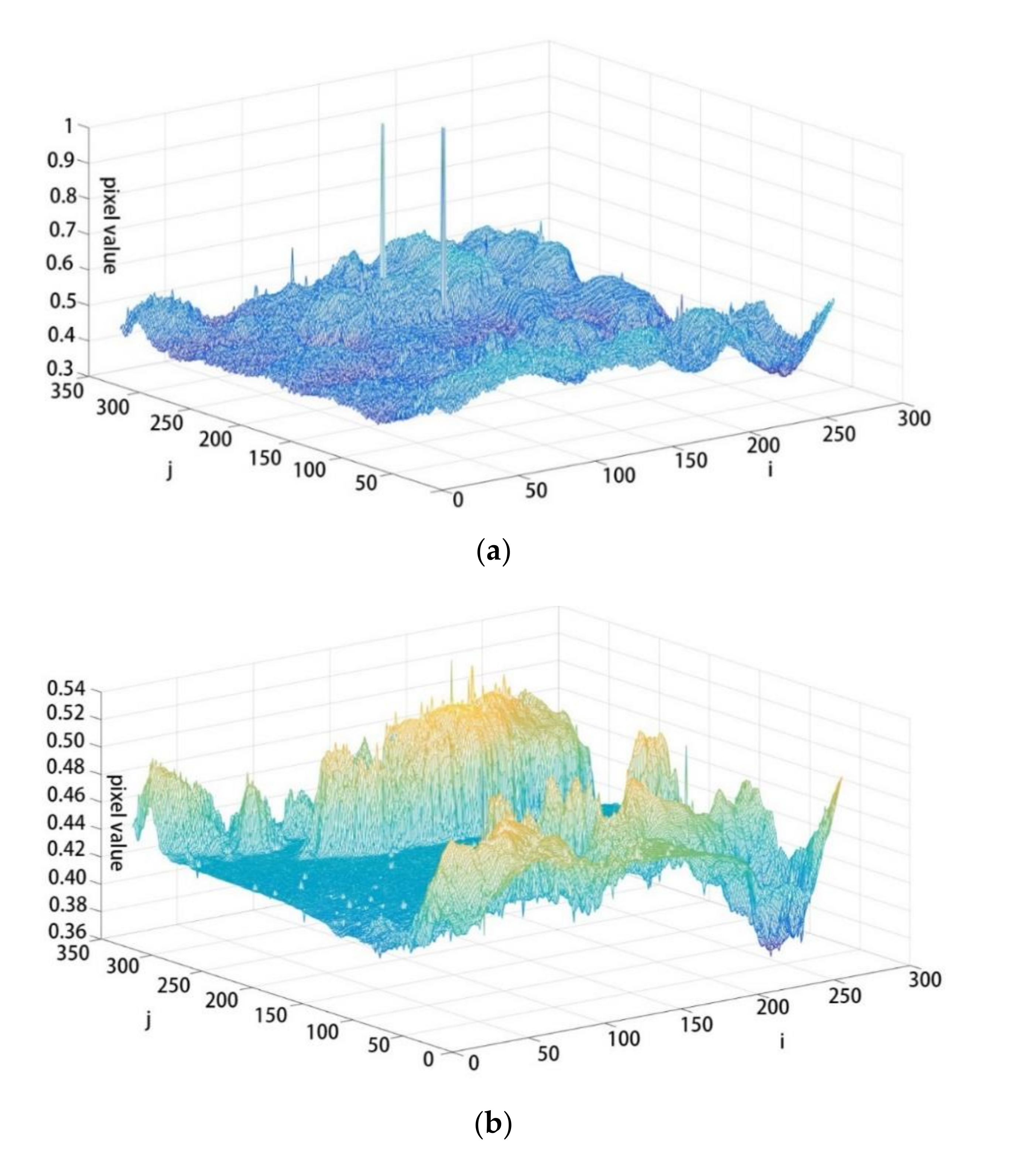
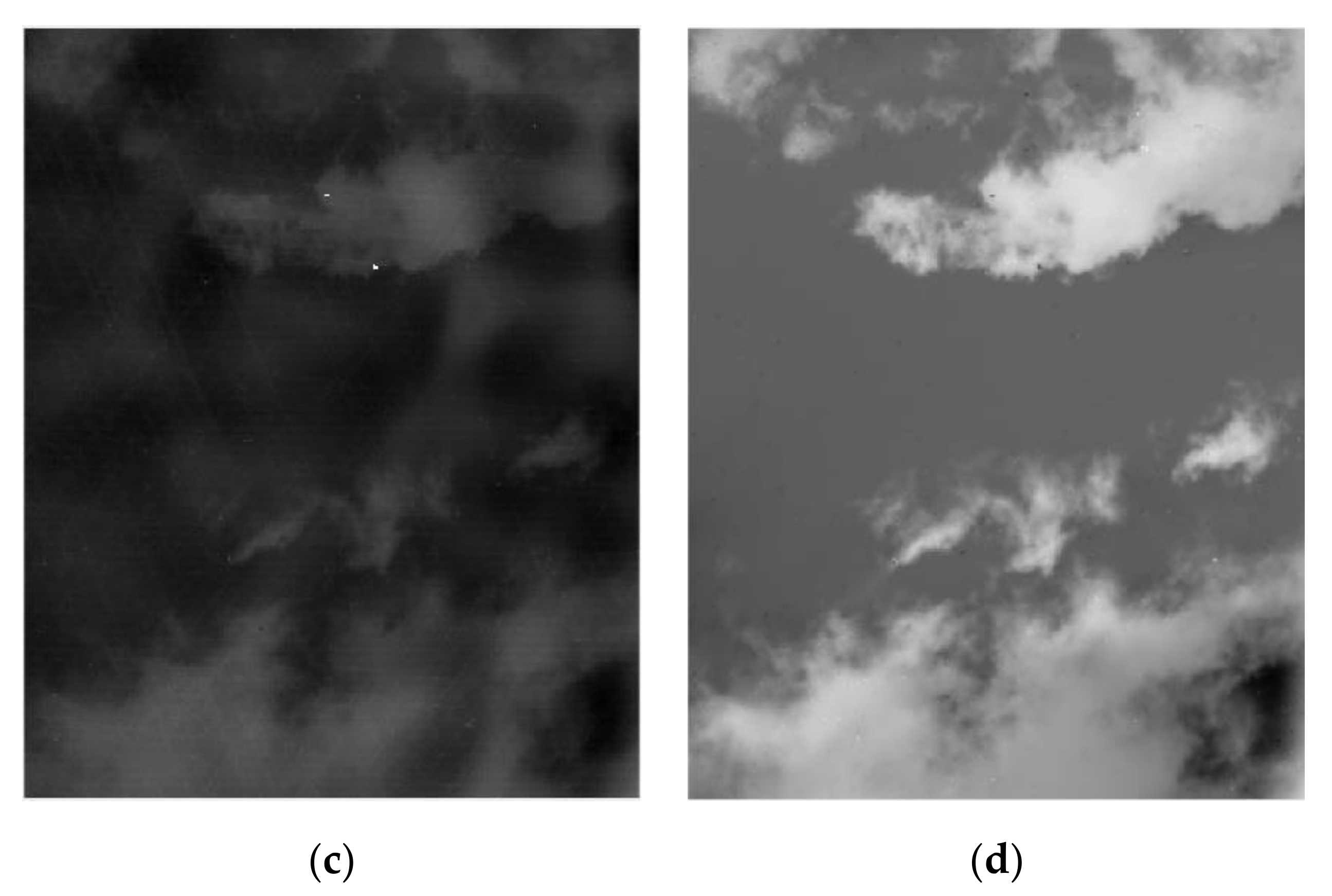
Figure 4 shows the image and its pixel distribution before and after correction.
In
Figure 4a,c, it is difficult to distinguish the content of the image due to the non-uniformity of the focal plane before correction, and there are two blind elements. However, by using the proposed method, we can easily determine the position of foreground clouds in the image, and the blind elements disappeared.
The results of the global mean standard deviation on each sequence are shown in
Table 2 using Equation (20). As can be seen in
Table 1, the average standard deviation of our method is the smallest. The other methods are the two-point method (that uses black body to achieve results), the statistical method, the IRLMS method (that uses consistent w (all-one) and b (all-zero)), the proposed method (CSIR), and the registration method using the two-point result as its initial value. Significantly, we use the average value of IRLMS results, CSIR results, and NSIR results, which were calculated from previous pictures, to correct the latest pictures.
These results also show that statistical methods have better accuracy in the two-picture sequence because they use the scenario itself to correct the result. However, in Sequence 2, statistical methods ahd poor performance, which was caused by flash pixel, while the CSIR method could improve the accuracy of the statistical methods in these three sequences.
Table 3 lists the frame numbers required by the three methods to achieve the above results. It should be noted that, when frame number grew three-fold or more, IRLMS and NSIR could have better results. However, this paper is mainly focused on low delay time NUC correction method, thus we do not care about situations that need too many frames.
For a more detailed comparison, we also evaluated our method on the local mean standard deviation using Equation (21). By cropping the same position of the corrected image and calculating the average standard deviation of the area, we compared the corrective effect of different methods on the details. The results of the local mean standard deviation over each sequence are presented in
Table 4. Our method still performed well. Significantly, the frame numbers of the three methods are the same in
Table 4.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}