Automatic Acoustic Target Detecting and Tracking on the Azimuth Recording Diagram with Image Processing Methods


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (a)
- Target space: this space is mainly composed of the target incident signal source and the actual environment. The DOA estimation systems capture the underwater acoustic information via some sensors, e.g., optic, pressure, or vector hydrophones.
- (b)
- Observation space: mainly refers to the use of arrays placed in space according to certain rules (e.g., uniform linear or spherical arrays) in advance to obtain the array information of the target incident signal source.
- (c)
- Estimation space: the parameter information of the target signal source obtained via the sonar array is extracted by the DOA estimation algorithm.
- (a)
- The first step of the postprocessing framework is to find the weak trajectory inundated with the noise on the diagram quickly and accurately. This paper realizes the automatic trajectory detecting via template matching. To this end, we propose a feasible trajectory template generation method allowing users to customize the template set for different requirements.
- (b)
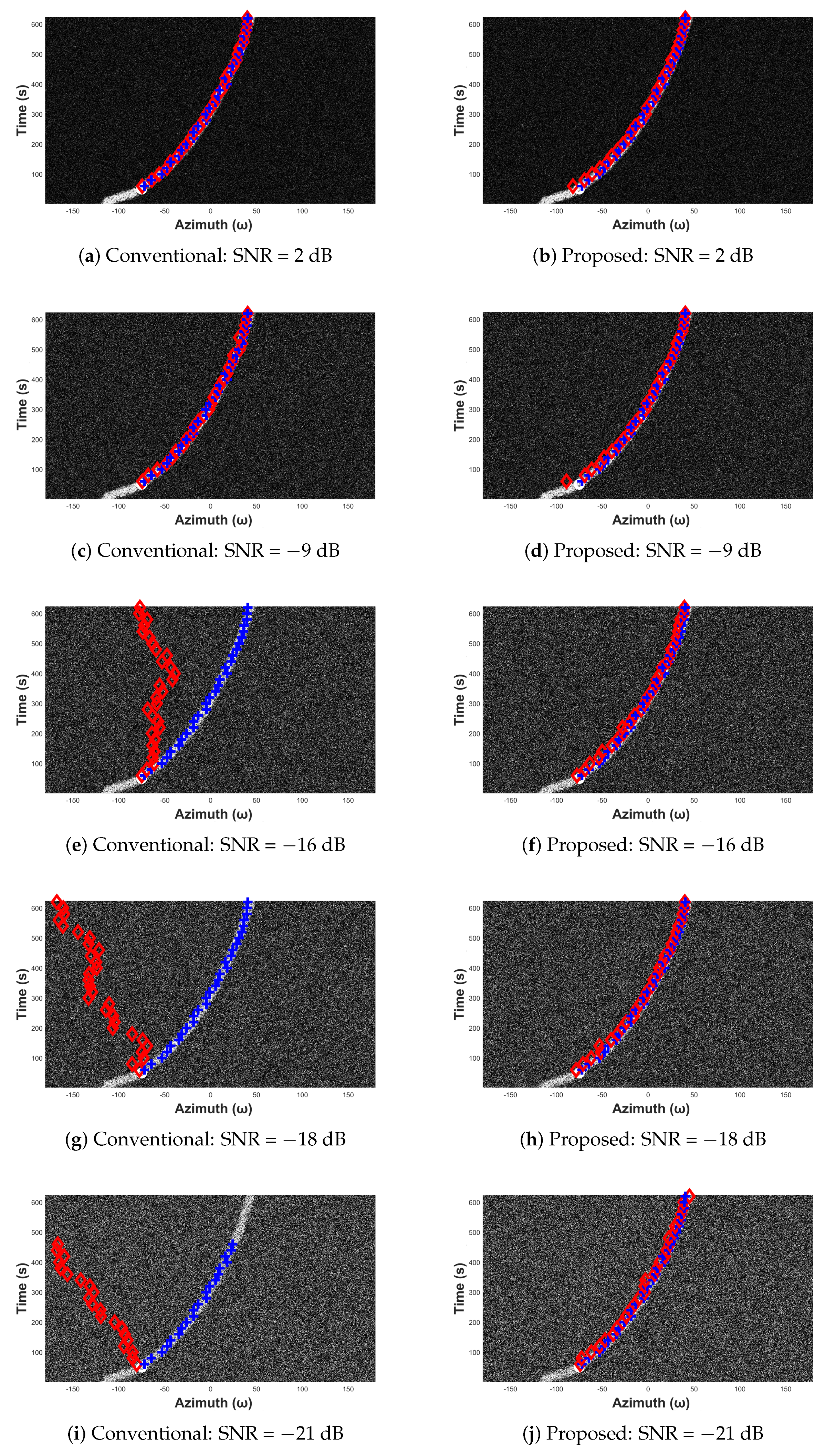
- Pattern enhancement is the second step. Conventional target tracking methods based on the azimuth recording diagram use the local power optima of the beams performed with different arrival directions as the patterns to track, which is easy to deviate from the trajectory due to the influences of ambient noise, so we enhance the trajectory patterns by using spatial separation methods, which significantly facilitates the tracking tasks.
- (c)
- Finally, the pattern enhancement method presented in this paper may lead to the azimuth migration if the target direction varies fast. An azimuth correction strategy is therefore conceived to improve the accuracy of the DOA estimation.
2. Related Work
- (a)
- (b)
- for all the weight vectors, compute the expectations of the output power with Equation (5); and
- (c)
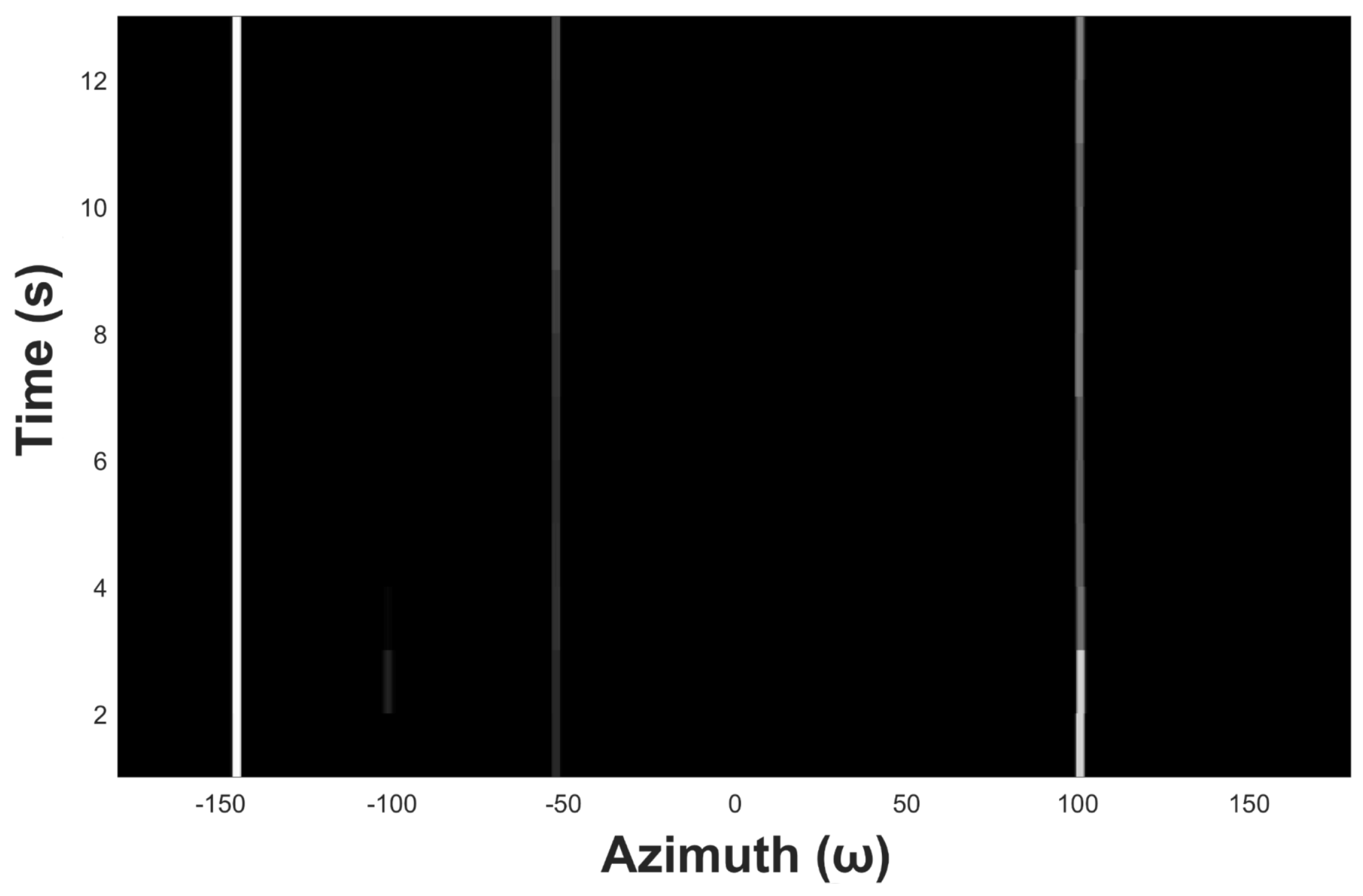
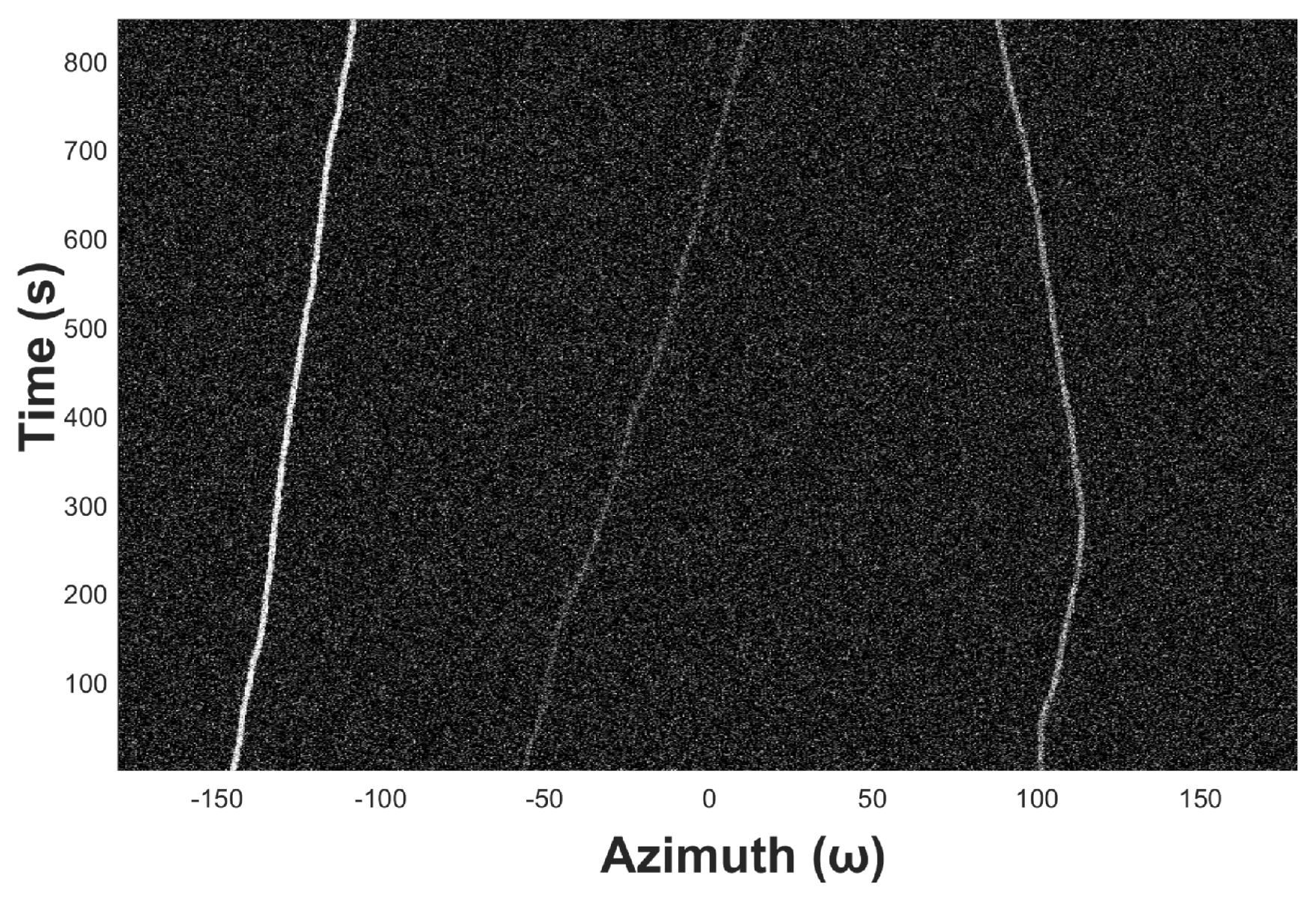
- perform the azimuth recording diagram by establishing a time-azimuth space coordinate system, in which the image intensity is used to represent the power level of the synthetic signals over time and azimuth.
3. Target Detection
3.1. Generation Model of Trajectory Templates
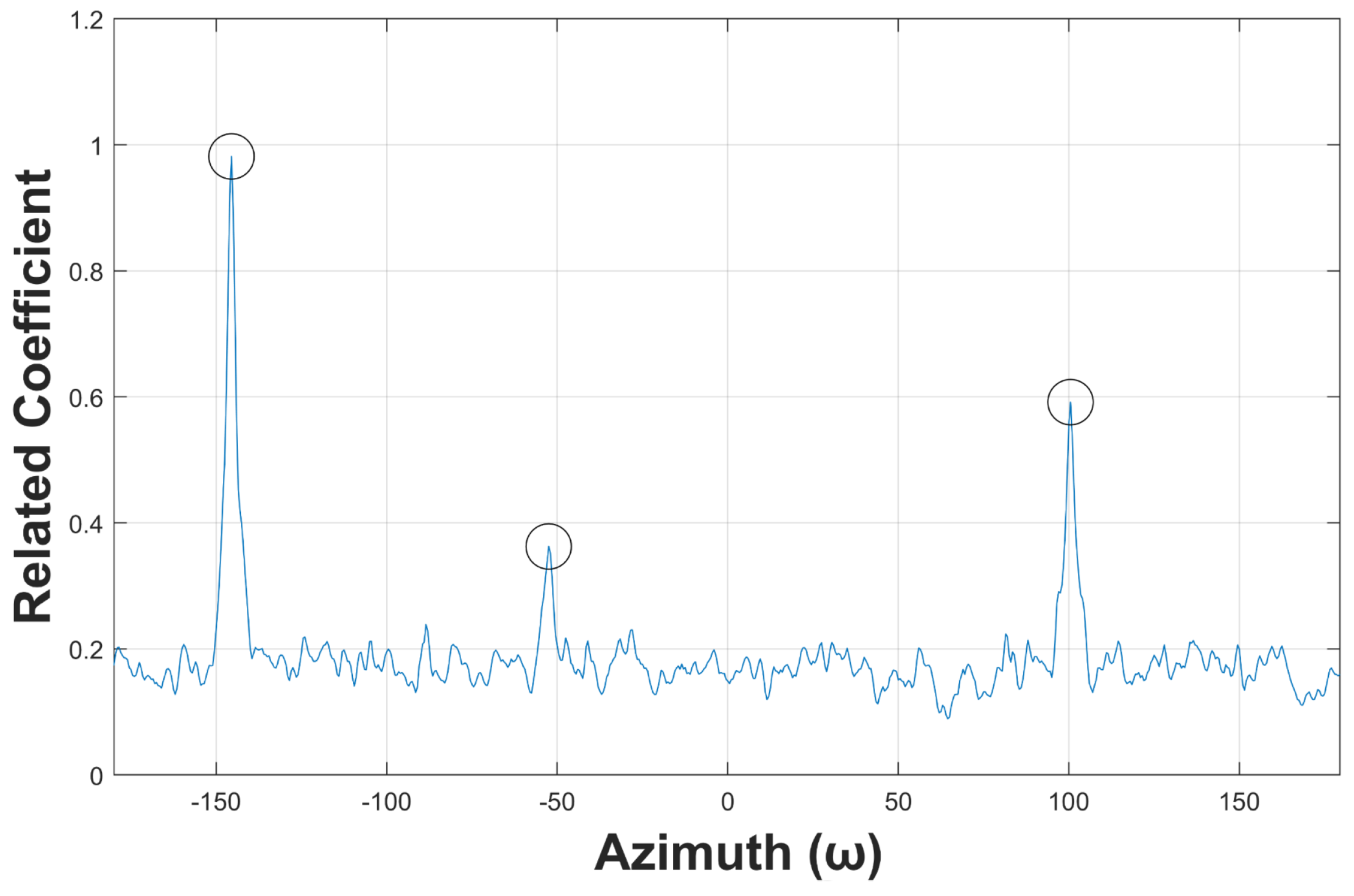
3.2. Matching Process
3.2.1. Two-Dimensional Matched Filter
3.2.2. Implementation of the Matching Process
4. Target Enhancement and Tracking
5. Experiments
5.1. Target Detection with Template Matching
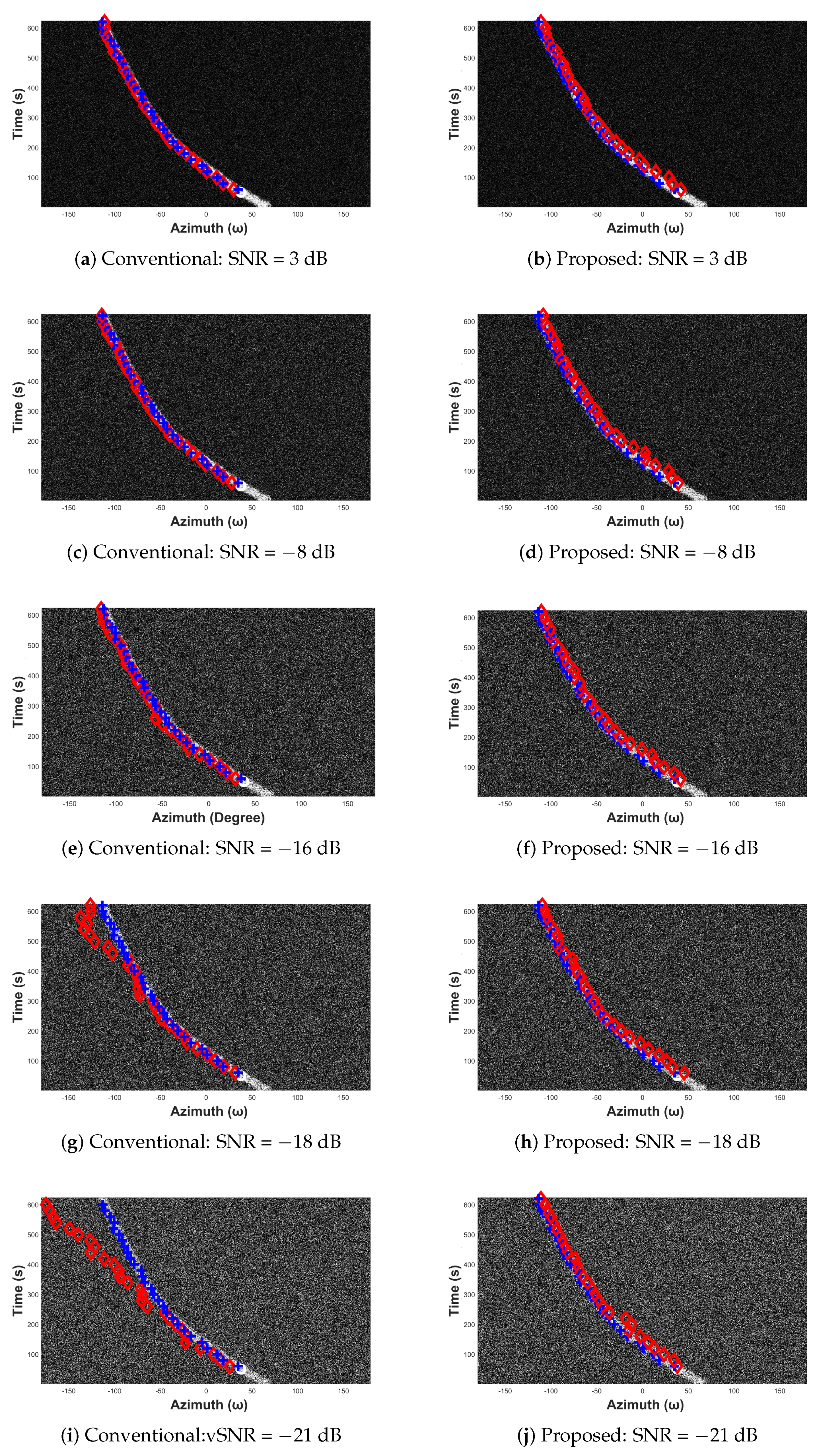
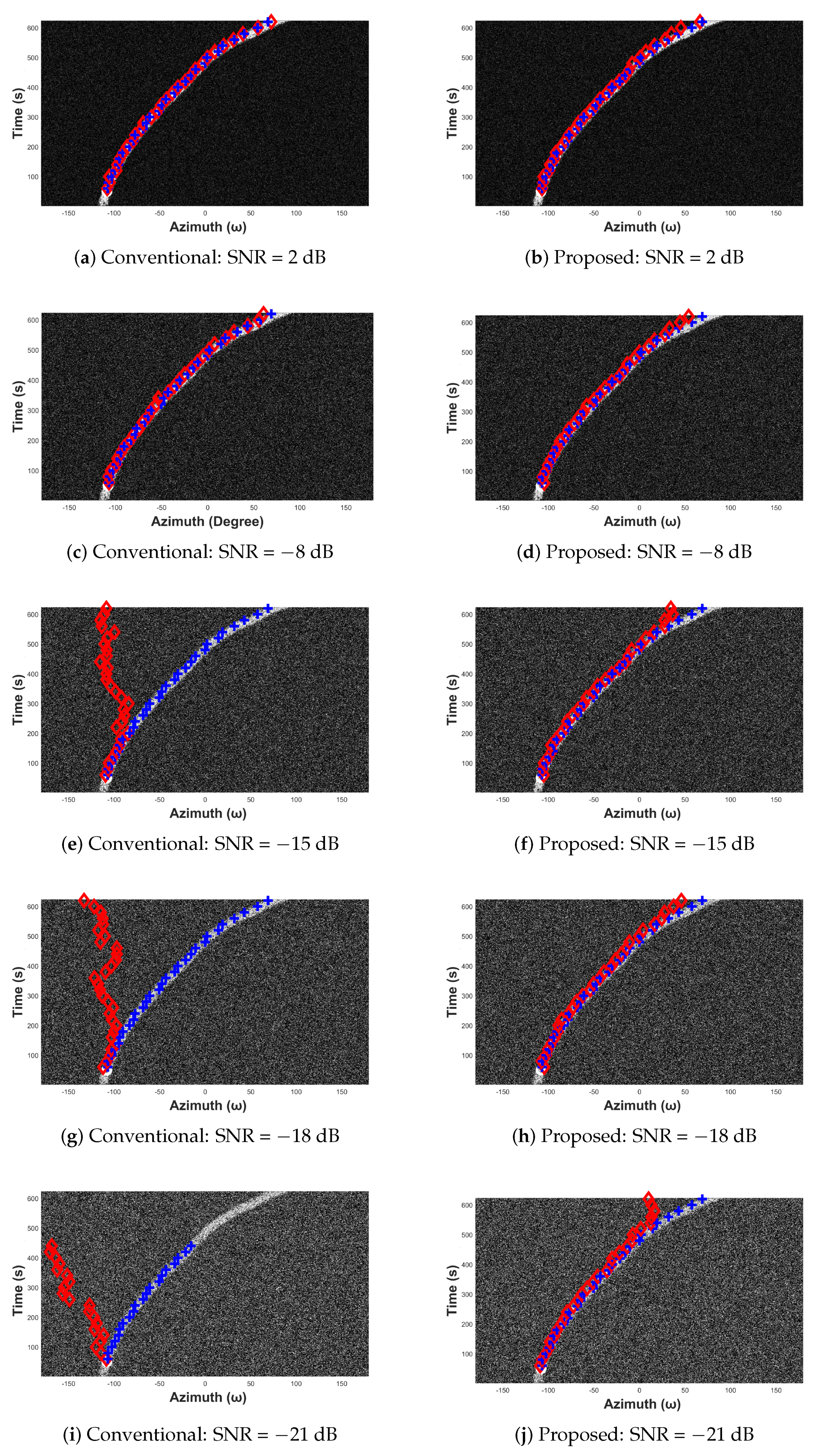
5.2. Target Tracking
5.3. Accuracy Evaluation
5.4. Temporal Efficiency
6. Discussion and Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A





References
- Vaccaro, R.J. The past, present, and the future of underwater acoustic signal processing. IEEE Signal Process. Mag. 1998, 15, 21–51. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Sozer, E.M.; Stojanovic, M.; Proakis, J.G. Underwater acoustic networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Muzic, R.F.; Nelson, A.D.; Miraldi, F. Temporal alignment of tissue and arterial data and selection of integration start times for the H215O autoradiographic CBF model in PET. IEEE Trans. Med. Imaging 1993, 12, 393–398. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.C. Deconvolved Conventional Beamforming for a Horizontal Line Array. IEEE J. Ocean. Eng. 2018, 43, 160–172. [Google Scholar] [CrossRef]
- Szalay, Z.; Nagy, L. Target modeling, antenna array design and conventional beamforming algorithms for radar target DOA estimation. In Proceedings of the 2015 17th International Conference on Transparent Optical Networks (ICTON), Budapest, Hungary, 5–9 July 2015; pp. 1–4. [Google Scholar]
- Burg, J.P. Maximum entropy spectral analysis. In Proceedings of the 37th meeting of the Annual International Society of Exploration Geophysicists Meeting, Oklahoma City, OK, USA, 31 October 1967. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Kay, S.M.; Marple, S.L. Spectrum analysis a modern perspective. Proc. IEEE 1981, 69, 1380–1419. [Google Scholar] [CrossRef]
- Yang, T.C.; Yang, W.B. Low signal-to-noise-ratio underwater acoustic communications using direct-sequence spread-spectrum signals. In Proceedings of the OCEANS 2007—Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Laot, C.; Coince, P. Experimental results on adaptive MMSE turbo equalization in shallow underwater acoustic communication. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, Australia, 24–27 May 2010; pp. 1–5. [Google Scholar]
- Cannelli, L.; Leus, G.; Dol, H.; van Walree, P. Adaptive turbo equalization for underwater acoustic communication. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; pp. 1–9. [Google Scholar]
- Li, H.Y.; Yin, F.; Li, C. A High-Accuracy Target Tracking Method and Its Application in Acoustic Engineering. In Proceedings of the 2019 IEEE 4th International Conference on Signal and Image Processing (ICSIP 2019), Wuxi, China, 19–21 July 2019; pp. 690–694. [Google Scholar]
- Berger, C.R.; Zhou, S.; Preisig, J.C.; Willett, P. Sparse channel estimation for multicarrier underwater acoustic communication: From subspace methods to compressed sensing. IEEE Trans. Signal Process. 2010, 58, 1708–1721. [Google Scholar] [CrossRef]
- Cam, H.; Ucan, O.N.; Ozduran, V. Multilevel/AES-LDPCC-CPFSK with channel equalization over WSSUS multipath environment. AEU-Int. J. Electron. Commun. 2011, 65, 1015–1022. [Google Scholar] [CrossRef]
- Fuxjaeger, A.W.; Iltis, R.A. Acquisition of timing and Doppler-shift in a direct-sequence spread-spectrum system. IEEE Trans. Commun. 1994, 42, 2870–2880. [Google Scholar] [CrossRef]
- Lago, T.; Eriksson, P.; Asman, M. The Symmiktos method: A robust and accurate estimation method for acoustic Doppler current estimation. In Proceedings of the OCEANS ’93, Victoria, BC, Canada, 18–21 October 1993; pp. 381–386. [Google Scholar]
- Burdinskiy, I.N.; Karabanov, I.V.; Linnik, M.A.; Mironov, A.S. Processing of phase-shift keyed pseudo noise signals of underwater acoustic systems with the Doppler effect. In Proceedings of the 2015 International Siberian Conference on Control and Communications (SIBCON), Omsk, Russia, 21–23 May 2015; pp. 1–4. [Google Scholar]
- Bartlett, M.S. Smoothing Periodograms from Time Series with Continuous Spectra. Nature 1948, 161, 686–687. [Google Scholar] [CrossRef]
- Shan, L.; Dejun, W.; Haibin, W. An approach to lofargram spectrum line detection based on spectrum line feature function. Tech. Acoust. 2016, 35, 373–377. [Google Scholar]
- Zhang, H.; Li, C.; Wang, H.; Wang, J.; Yang, F. Frequency line extraction on low SNR lofargram using principal component analysis. In Proceedings of the 2018 IEEE 14th International Conference on Signal Processing (ICSP 2018), Beijing, China, 12–16 August 2018; pp. 12–16. [Google Scholar]
- Zhen, L.; Li, W.; Zhao, X. Feature Frequency Extraction Based on Principal Component Analysis and Its Application in Axis Orbit. Shock Vib. 2018, 2018, 1–17. [Google Scholar]
- Wang, M. An Improved Image Segmentation Algorithm Based on Principal Component Analysis. Lect. Notes Electr. Eng. 2014, 4, 811–819. [Google Scholar]
- López-Rodrguez, P.; Escot-Bocanegra, D.; FernándezRecio, R.; Bravo, I. Non-cooperative target recognition by means of singular value decomposition applied to radar high resolution range profiles. Sensors 2015, 15, 422–439. [Google Scholar] [CrossRef] [PubMed]
- Demmel, J.; Veselic, K. Jacobi’s Method is More Accurate than QR. SIAM J. Matrix Anal. Appl. 1992, 13, 1204–1245. [Google Scholar] [CrossRef]
- Drmac, Z. A posteriori computation of the singular vectors in a preconditioned Jacobi SVD algorithm. IMA J. Numer. Anal. 1999, 19, 191–213. [Google Scholar] [CrossRef]




















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, F.; Li, C.; Wang, H.; Yang, F. Automatic Acoustic Target Detecting and Tracking on the Azimuth Recording Diagram with Image Processing Methods. Sensors 2019, 19, 5391. https://doi.org/10.3390/s19245391
Yin F, Li C, Wang H, Yang F. Automatic Acoustic Target Detecting and Tracking on the Azimuth Recording Diagram with Image Processing Methods. Sensors. 2019; 19(24):5391. https://doi.org/10.3390/s19245391
Chicago/Turabian StyleYin, Fan, Chao Li, Haibin Wang, and Fan Yang. 2019. "Automatic Acoustic Target Detecting and Tracking on the Azimuth Recording Diagram with Image Processing Methods" Sensors 19, no. 24: 5391. https://doi.org/10.3390/s19245391
APA StyleYin, F., Li, C., Wang, H., & Yang, F. (2019). Automatic Acoustic Target Detecting and Tracking on the Azimuth Recording Diagram with Image Processing Methods. Sensors, 19(24), 5391. https://doi.org/10.3390/s19245391