Experimental Evaluation of a UWB-Based Cooperative Positioning System for Pedestrians in GNSS-Denied Environment

 , , ,
, , ,  , , and
, , and
Abstract
:1. Introduction
2. State-of-the-Art in UWB Positioning
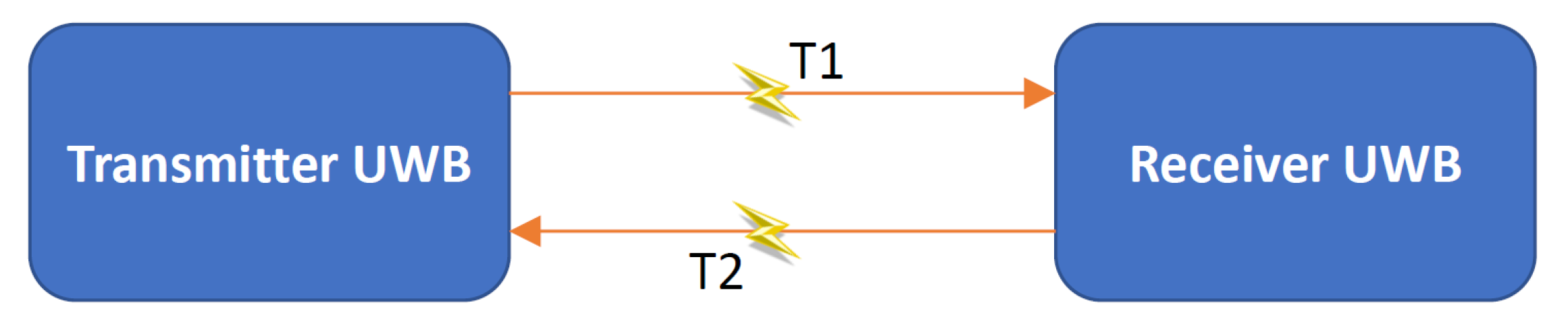
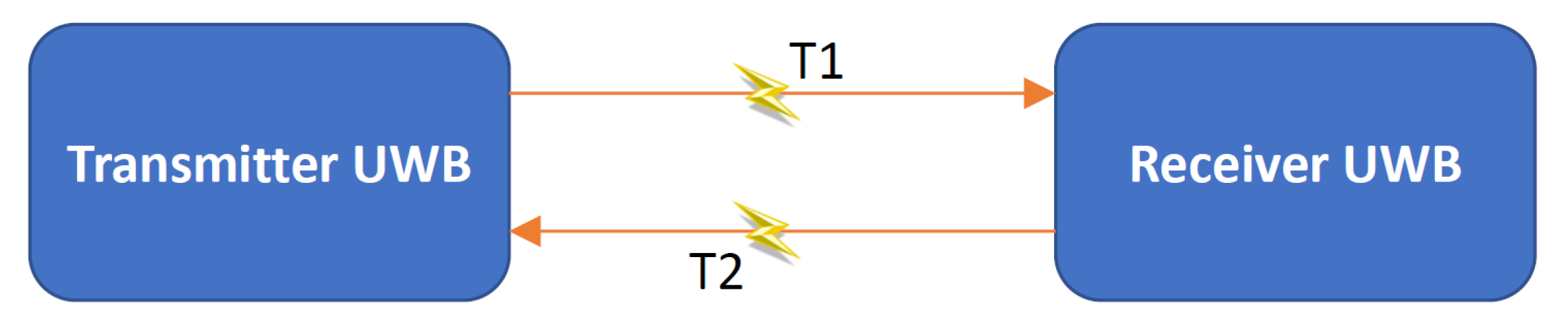
2.1. TOA, RTT, and TDOA-Based Methods
2.2. AOA-Based Methods
2.3. RSSI-Based Methods
2.4. Hybrid Methods
3. CP Prototype System and Experiences
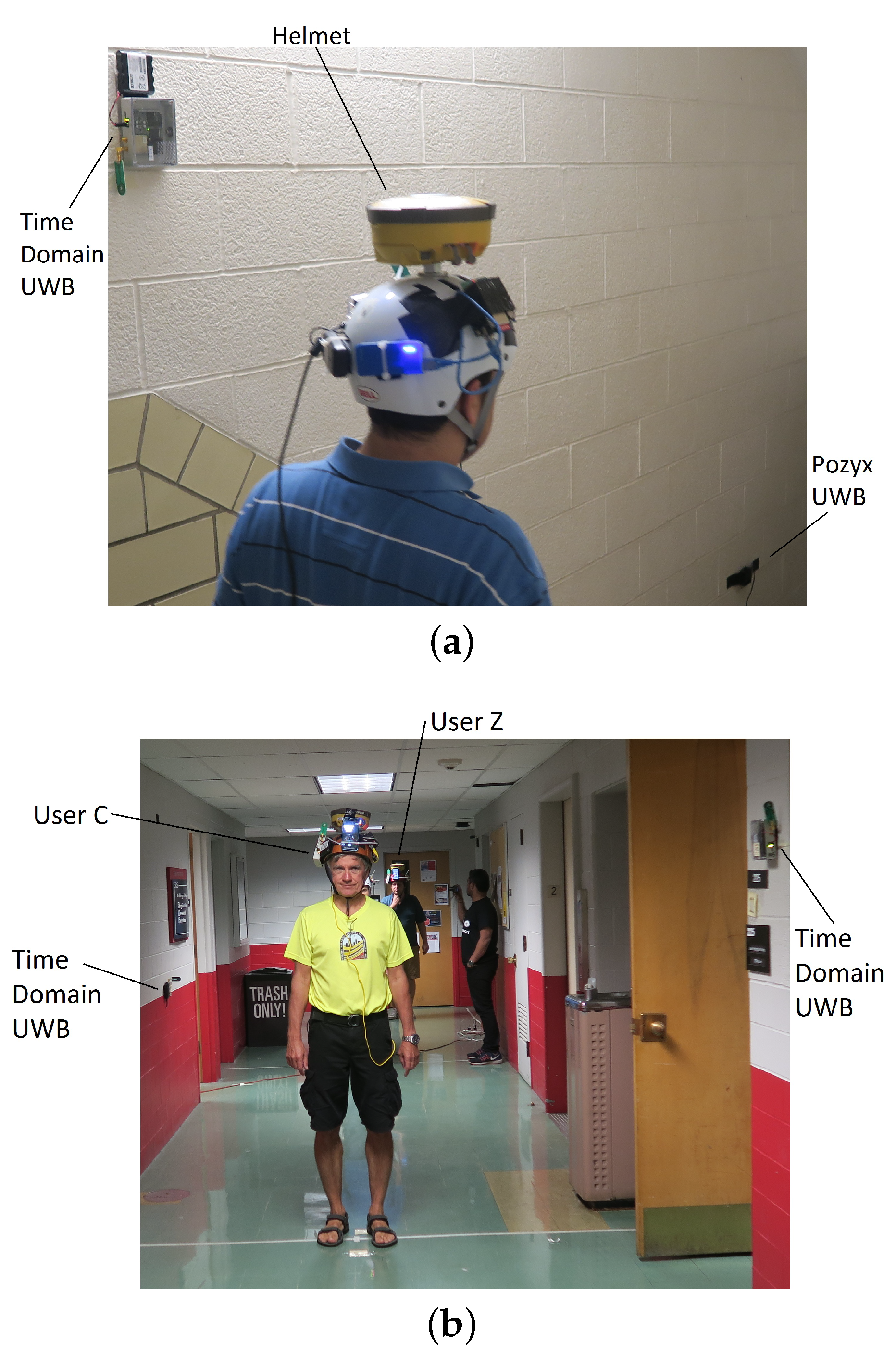
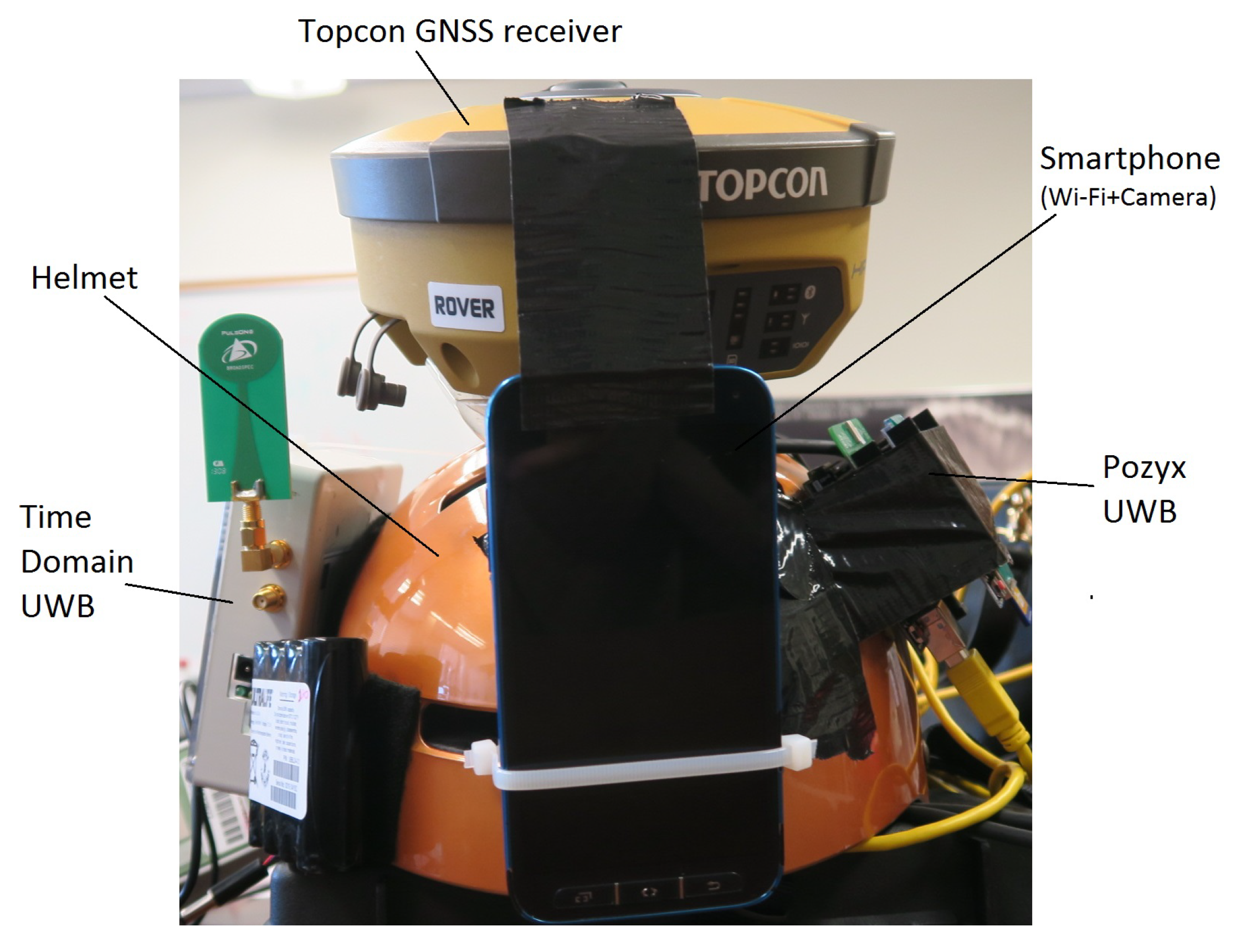
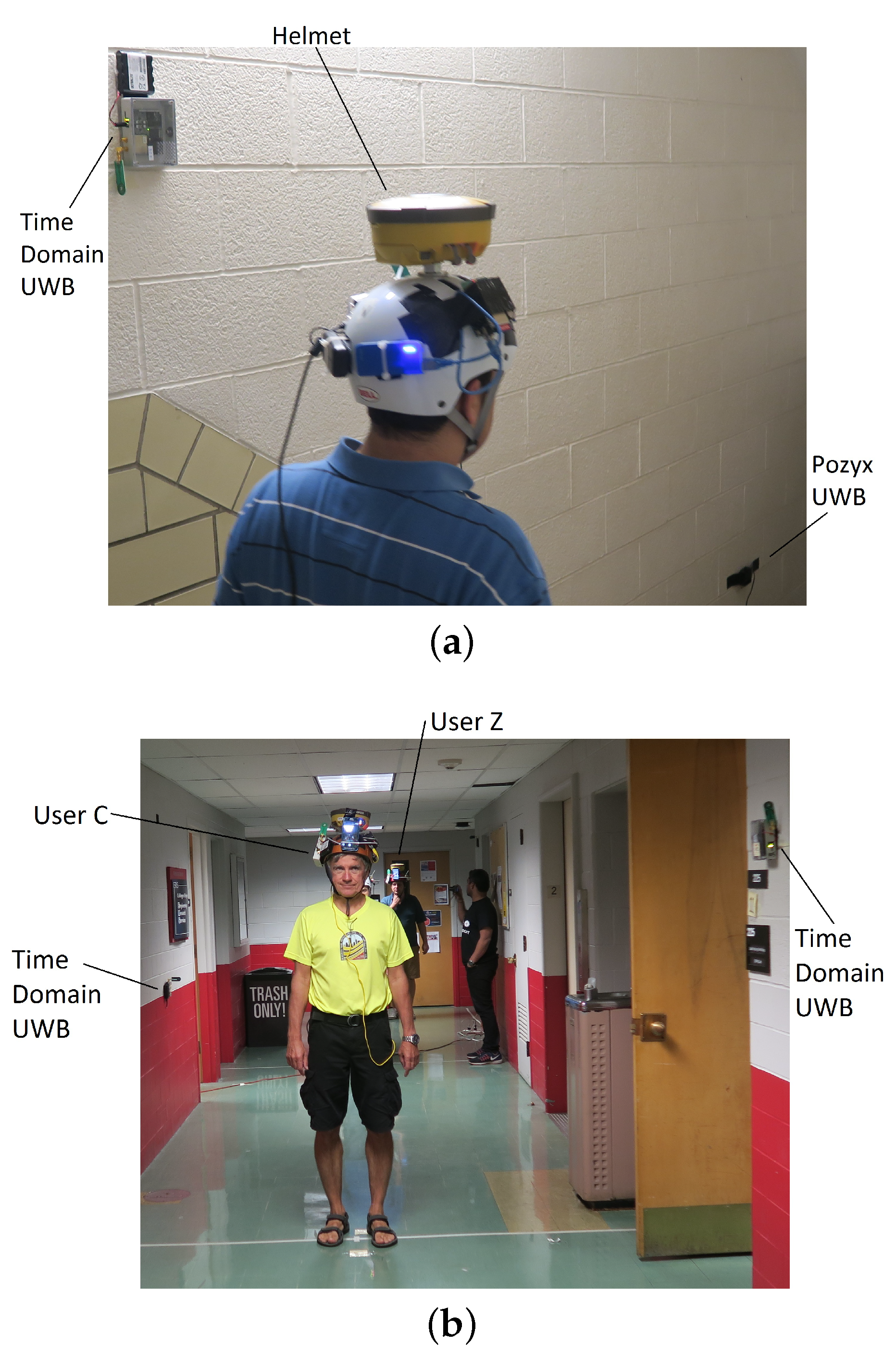
3.1. MUPS Prototype
UWB Systems Description
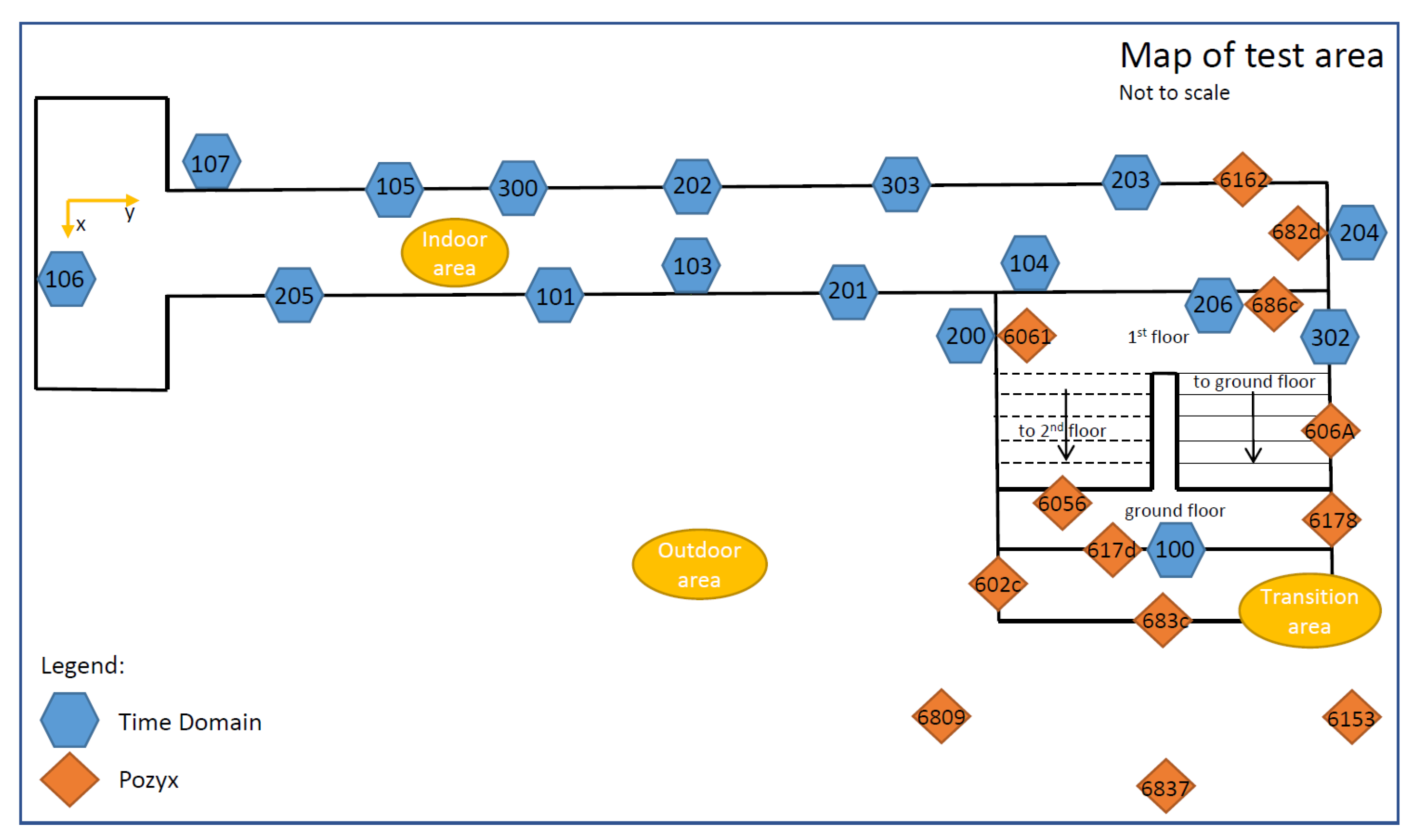
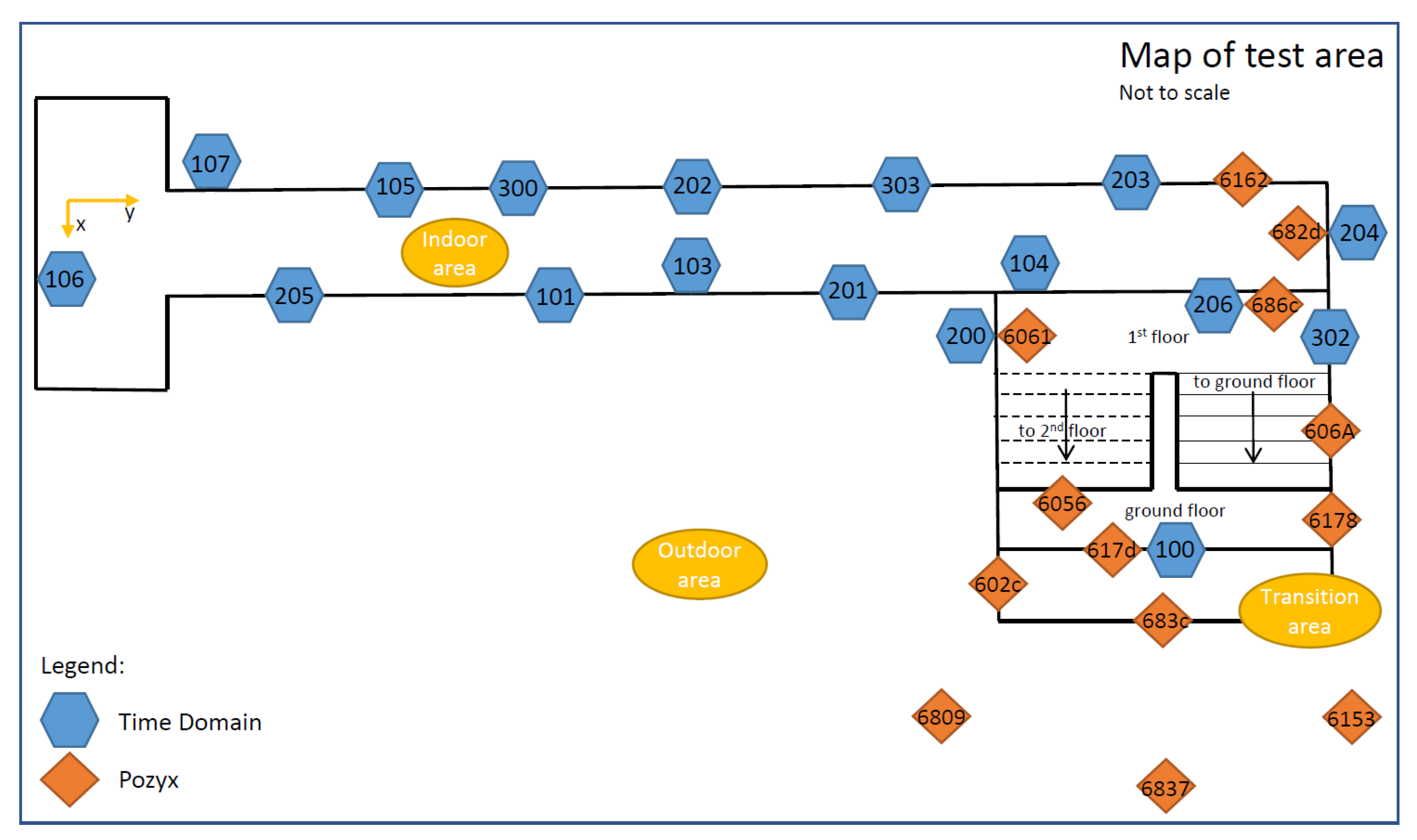
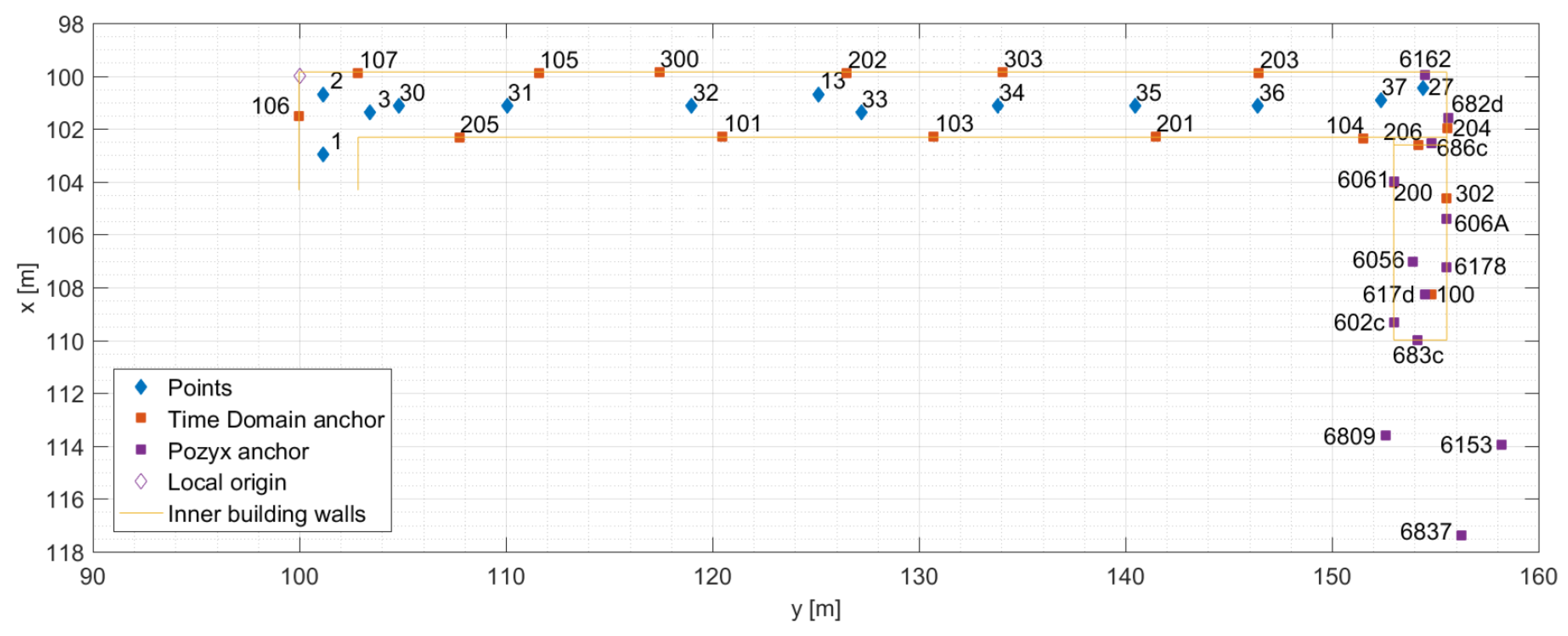
3.2. Description of Field Test Site
3.3. Data Collection Procedure
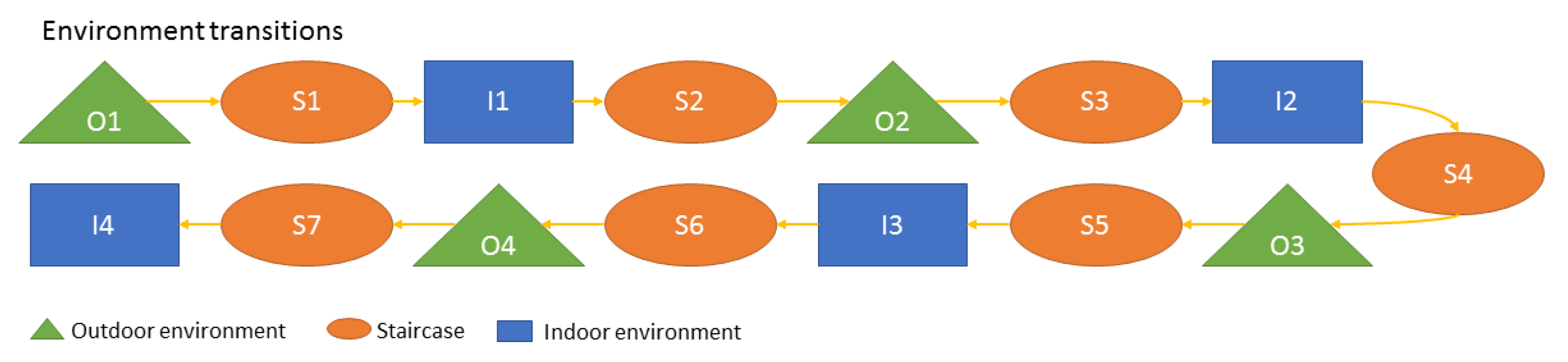
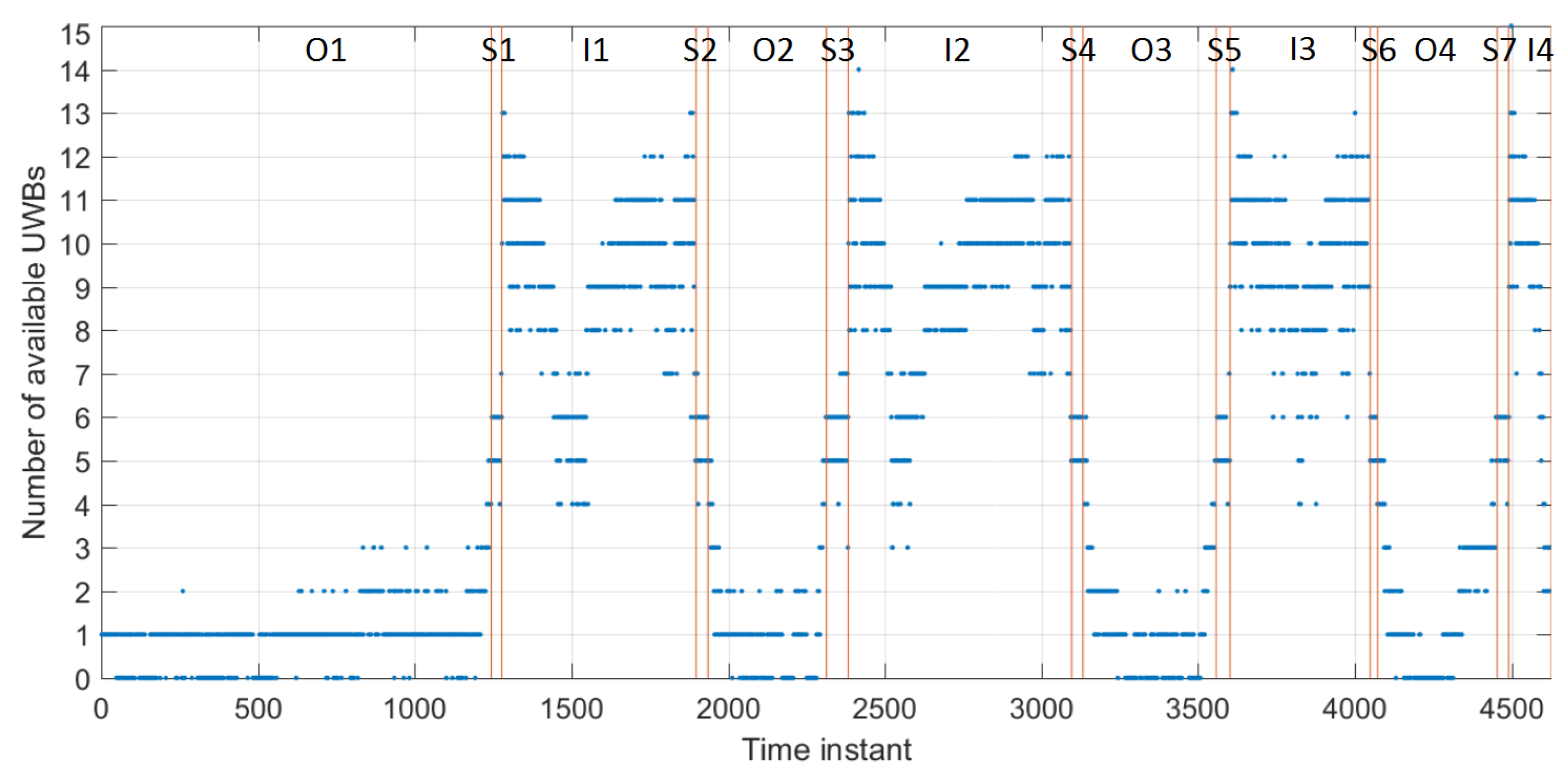
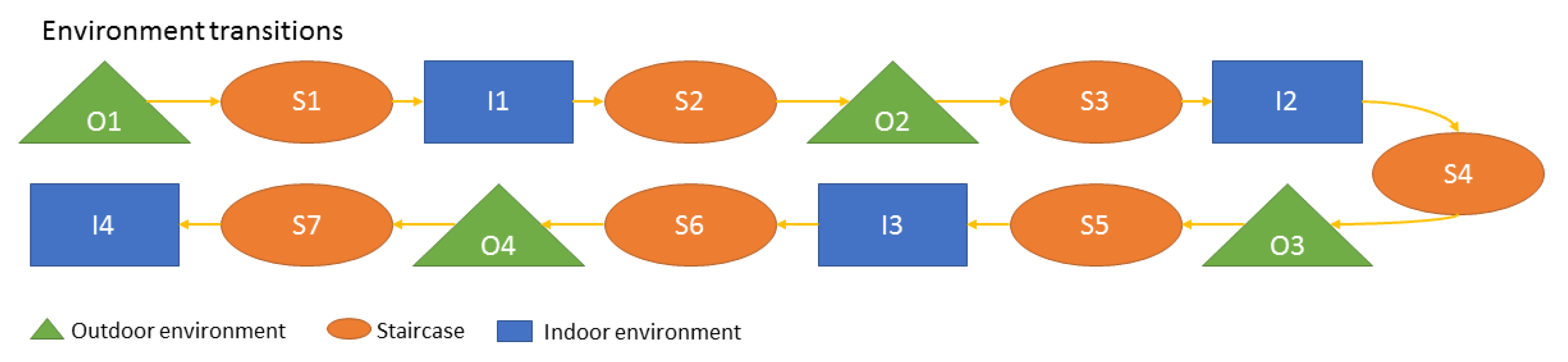
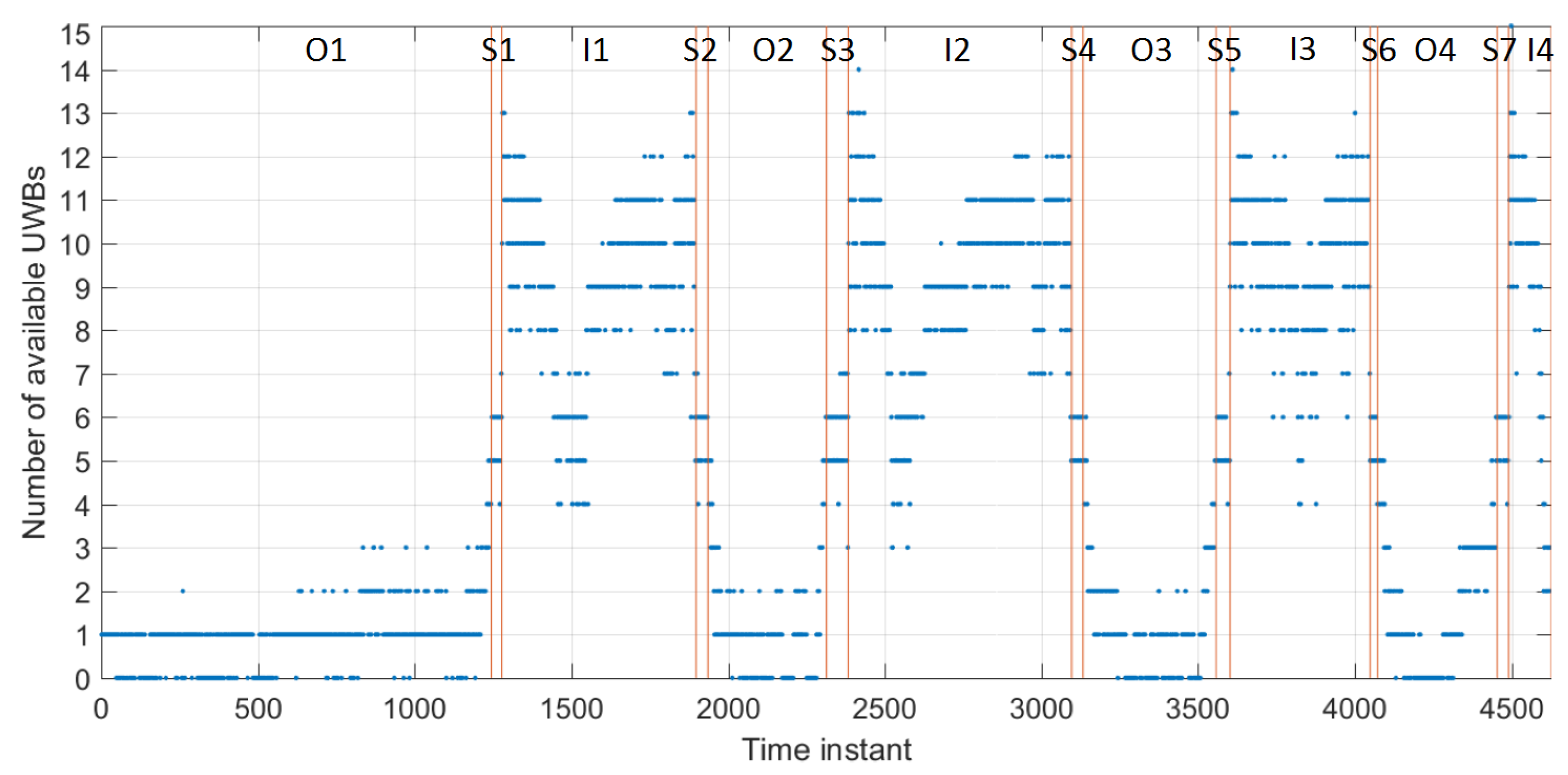
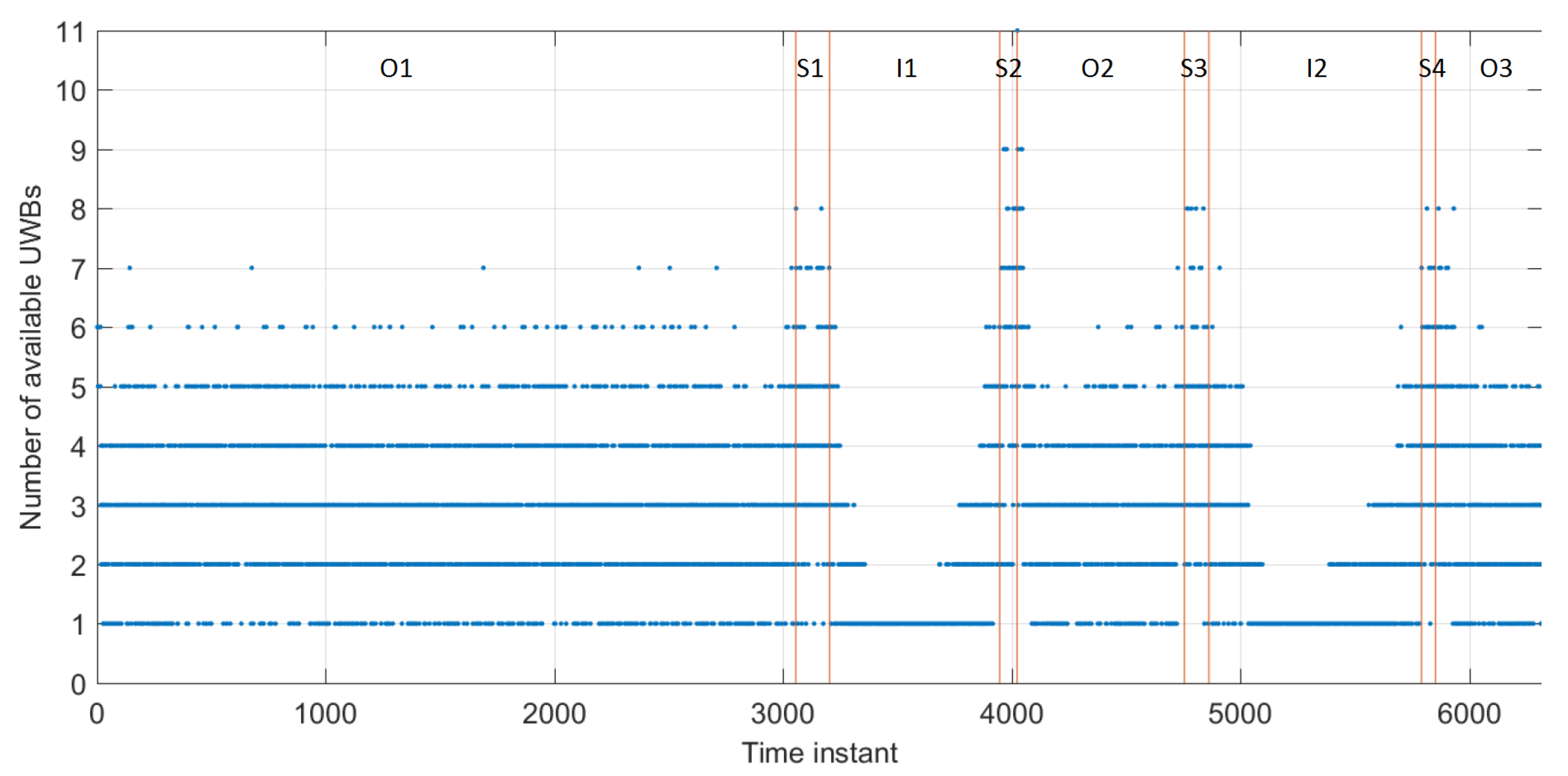
3.4. Data Availability in Different Environments
4. Positioning Framework
5. Results and Discussion
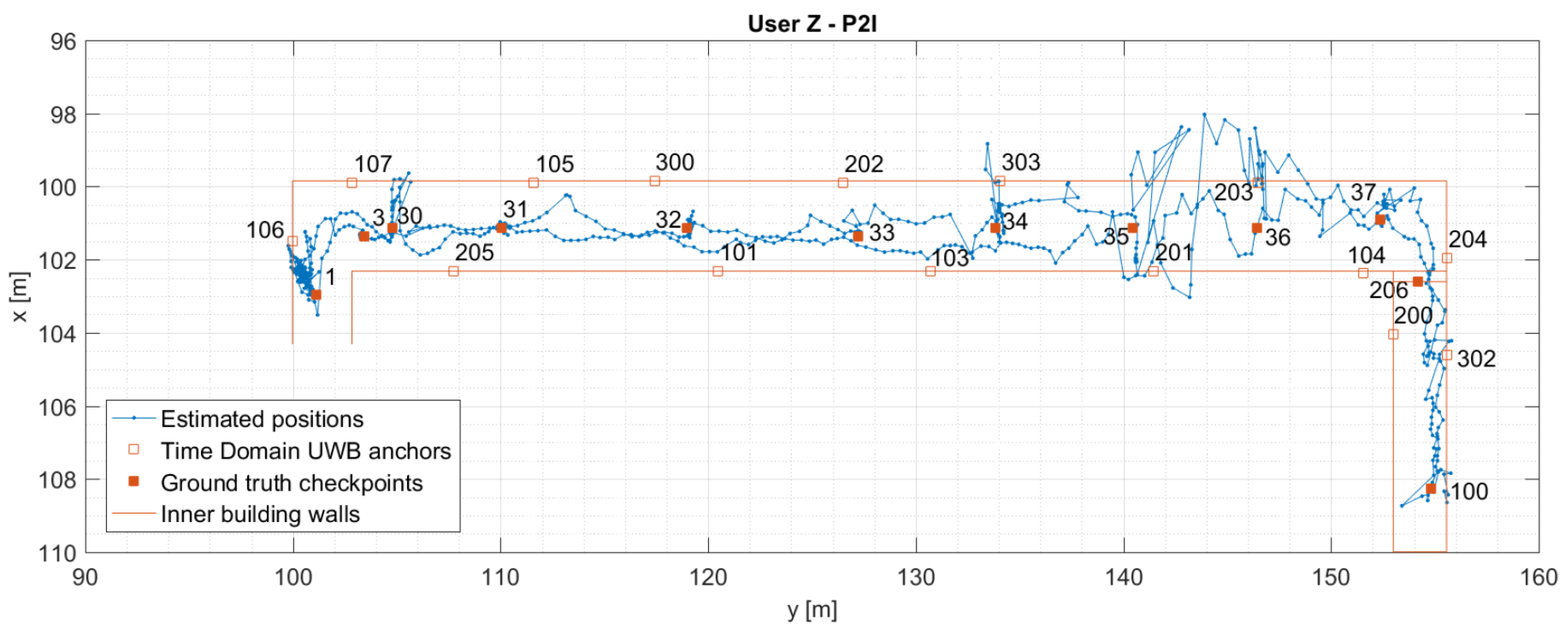
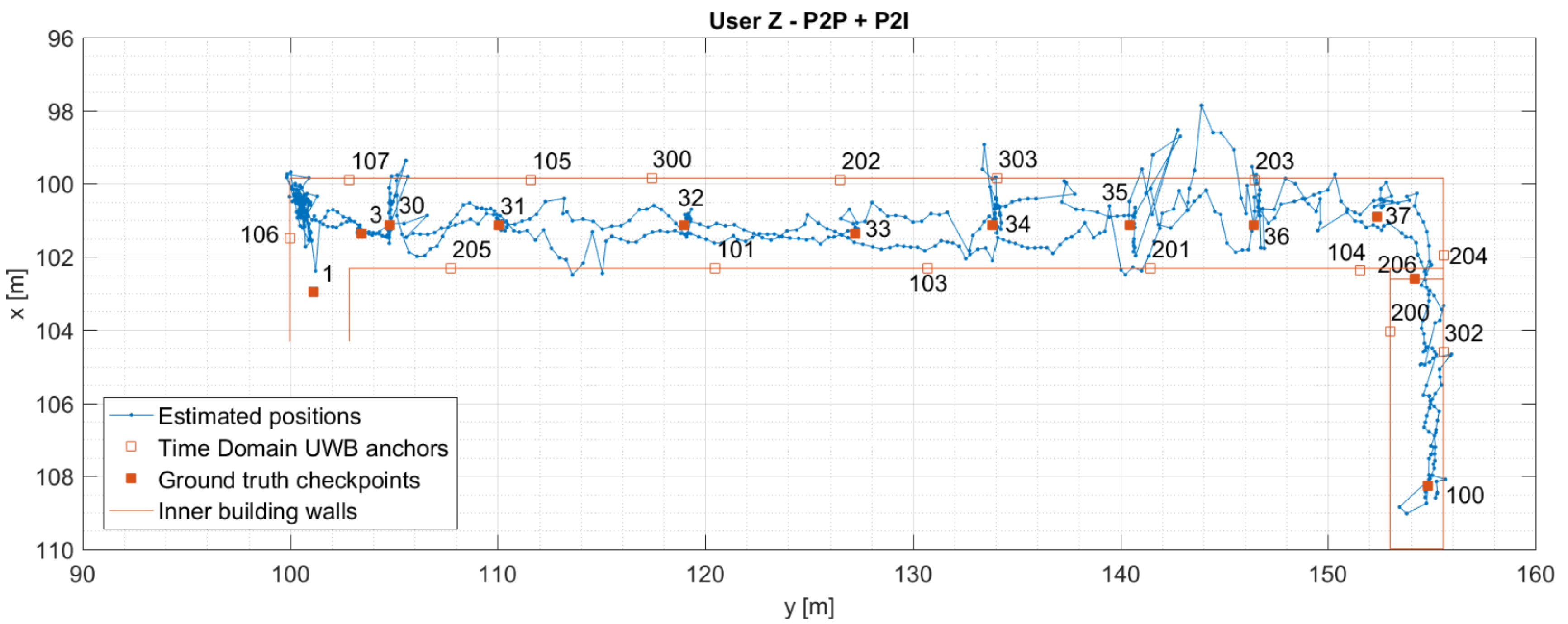
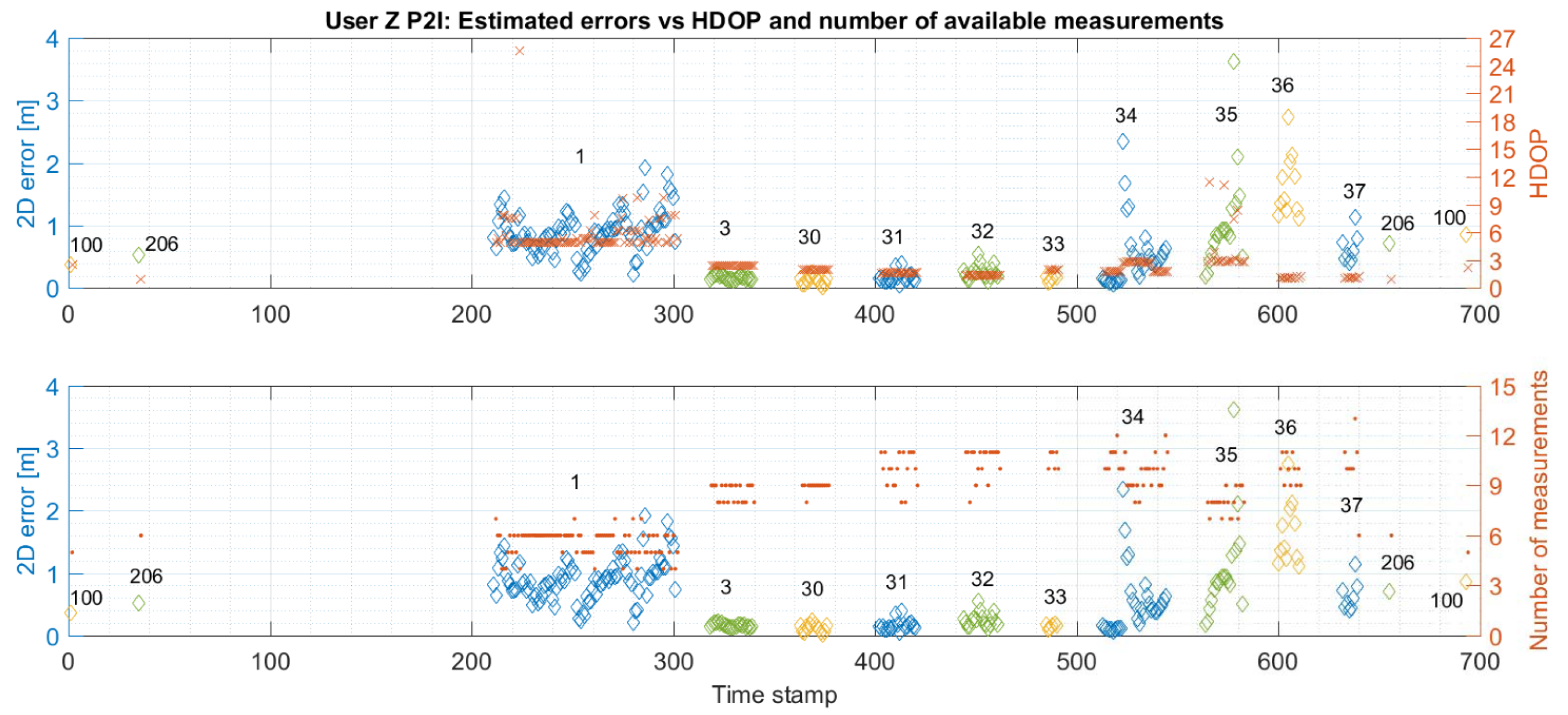
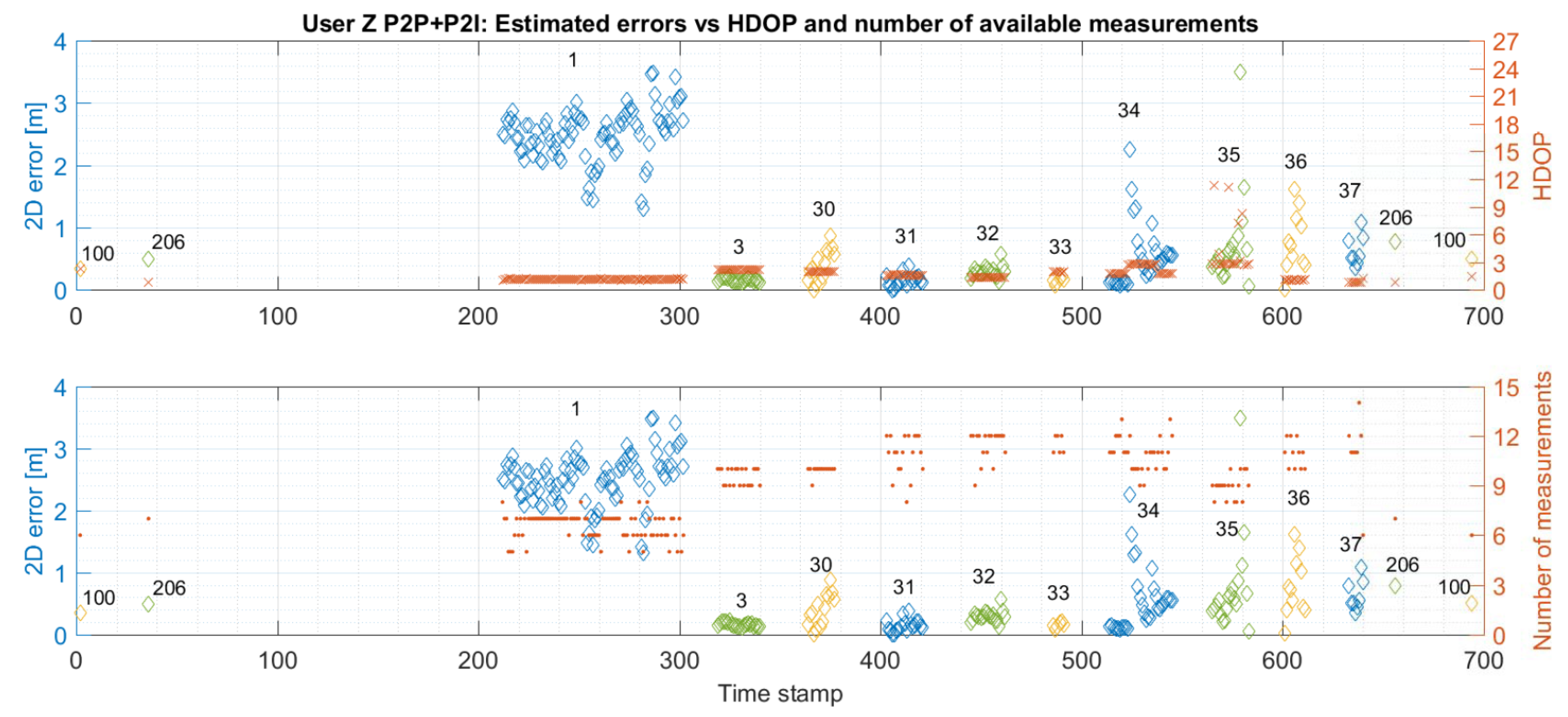
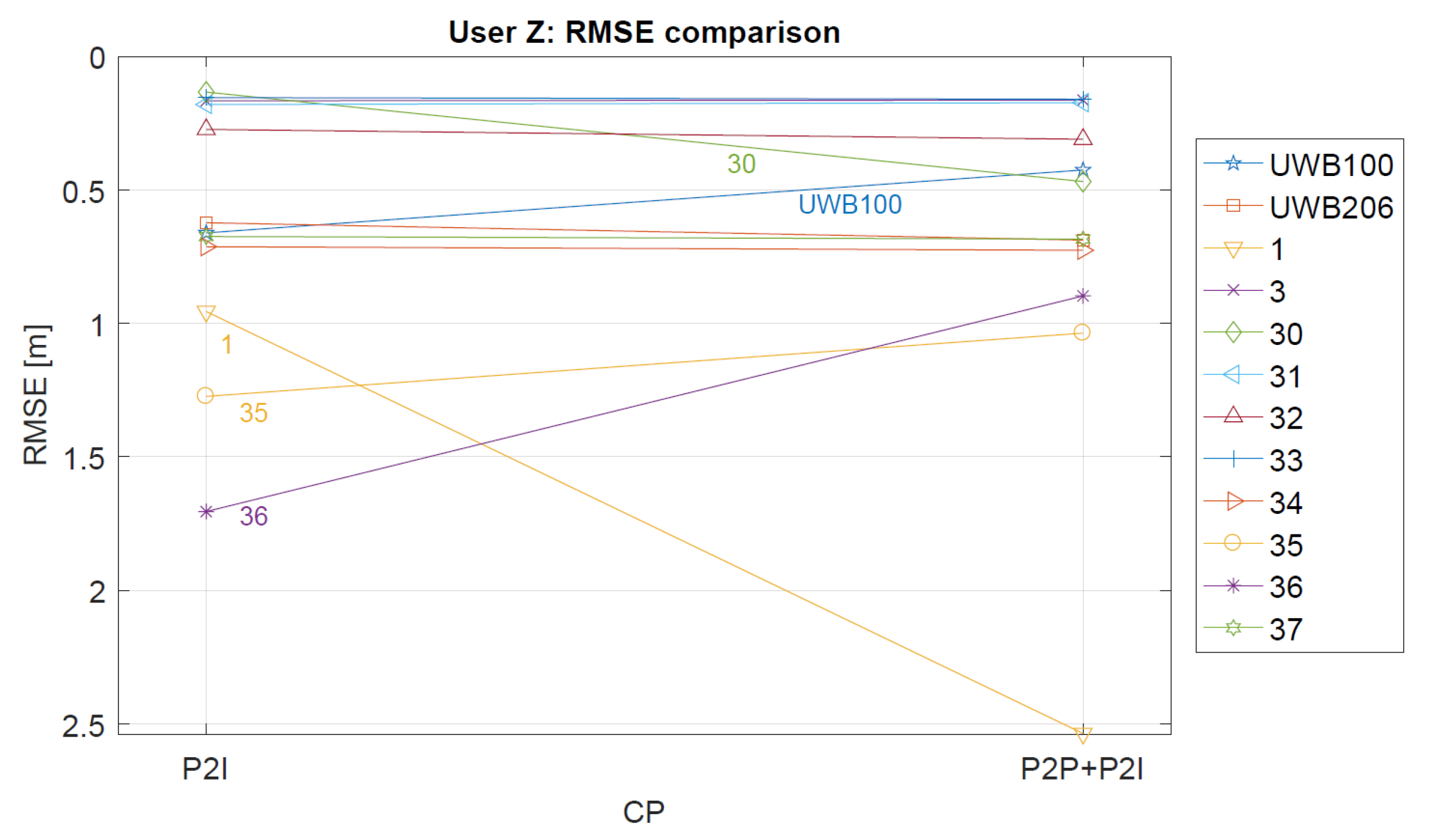
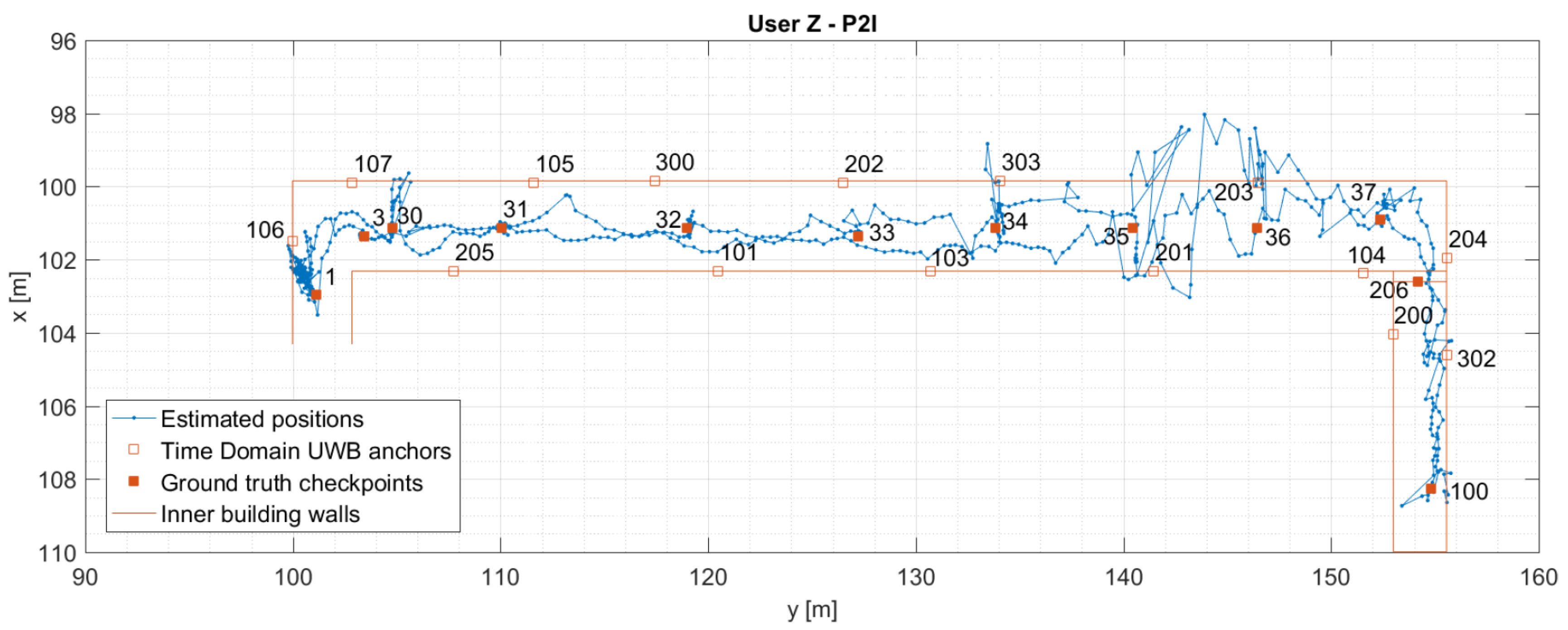
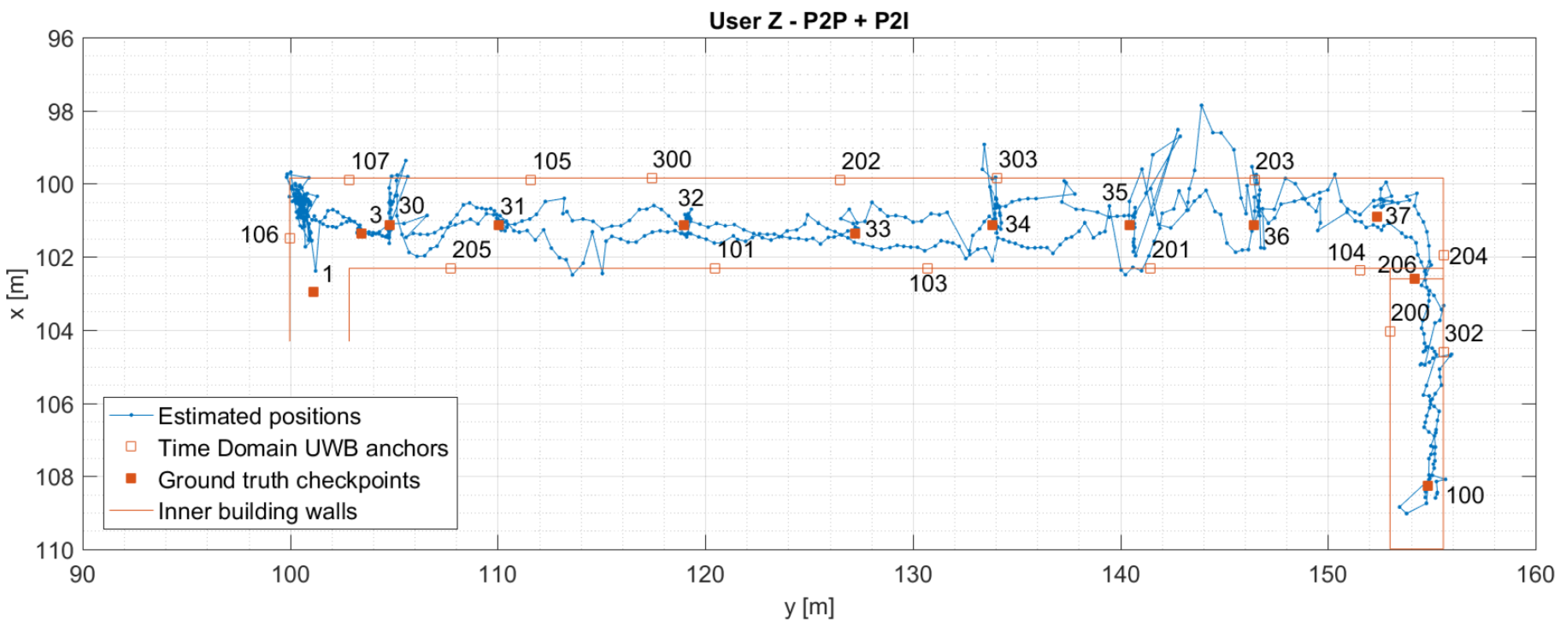
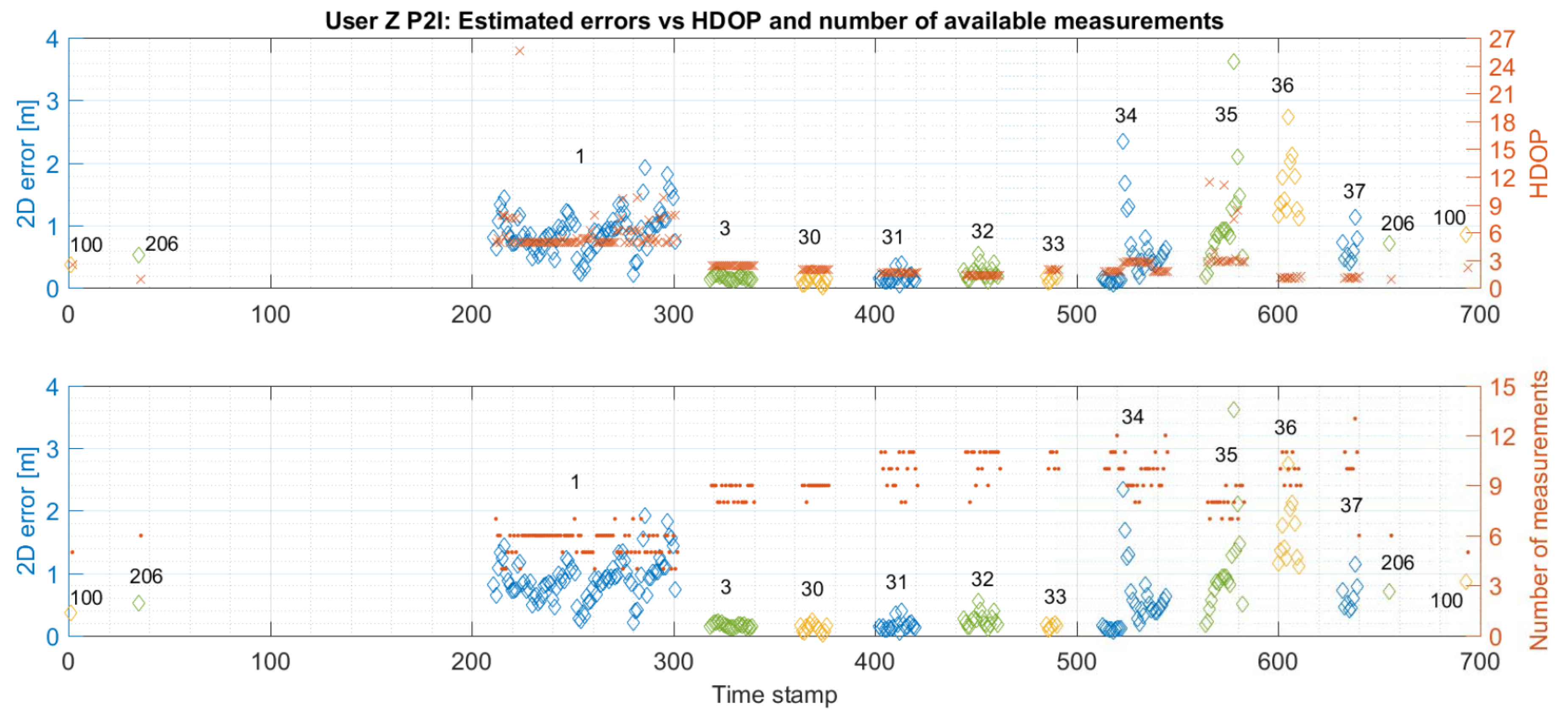
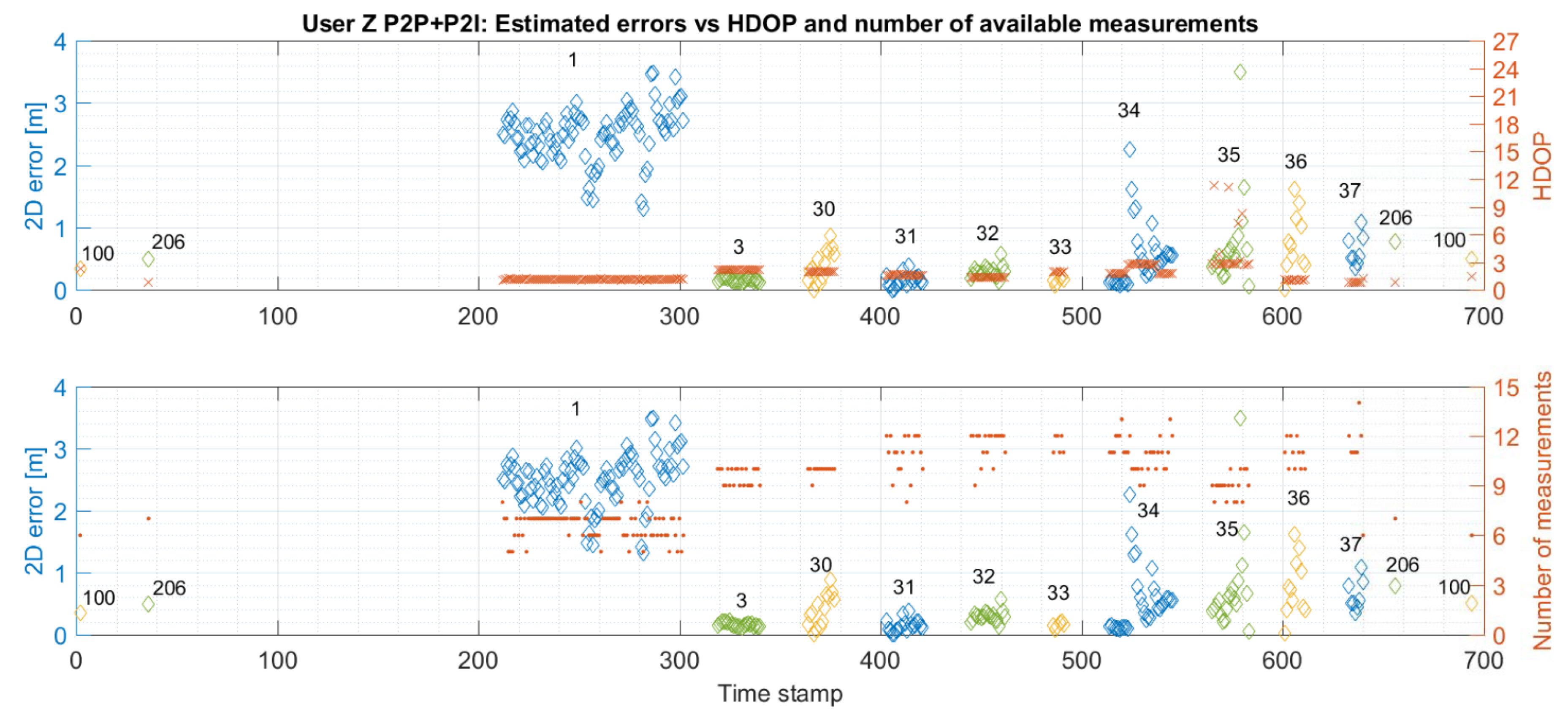
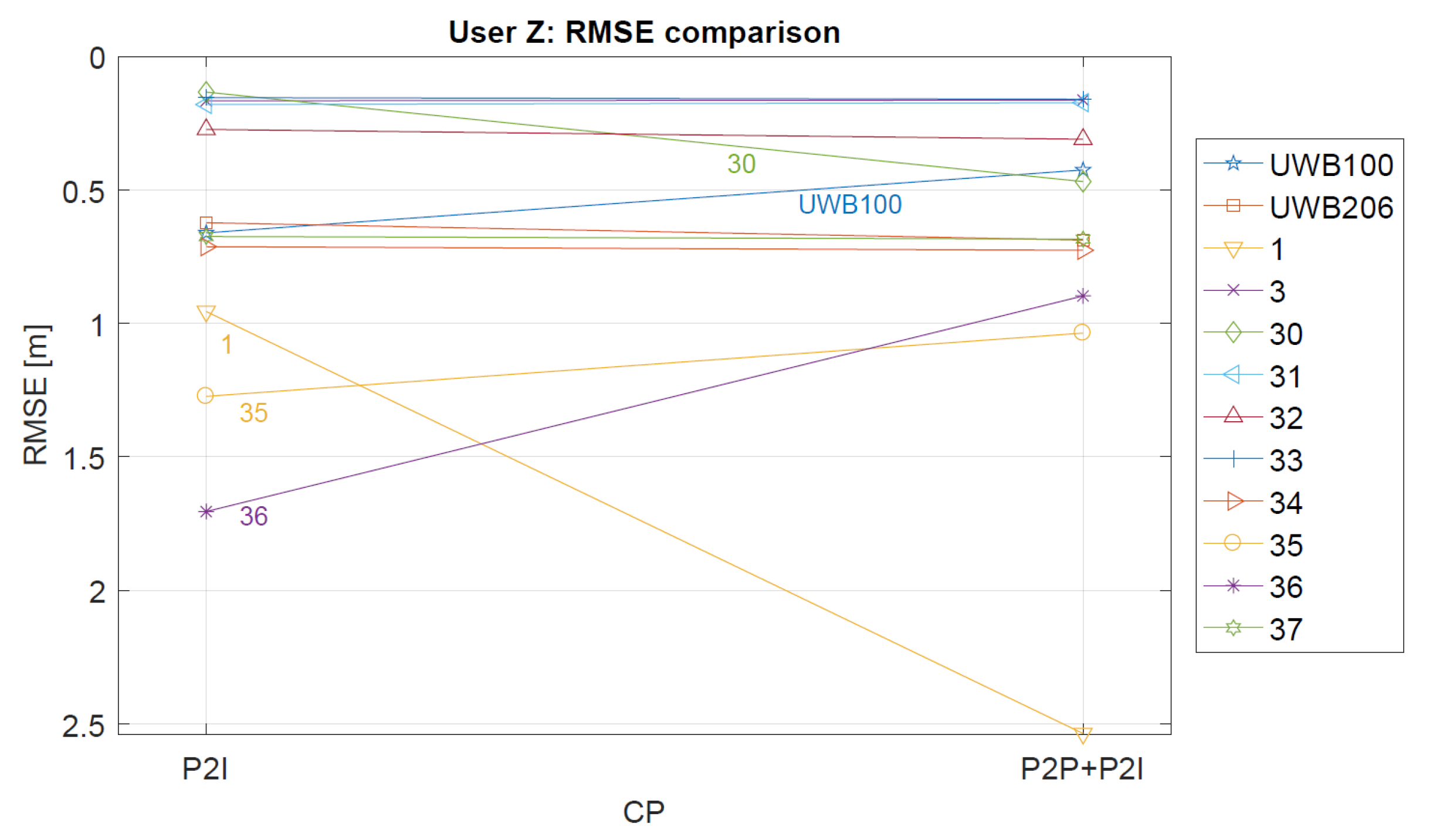
5.1. User Z: P2I vs. P2P+P2I
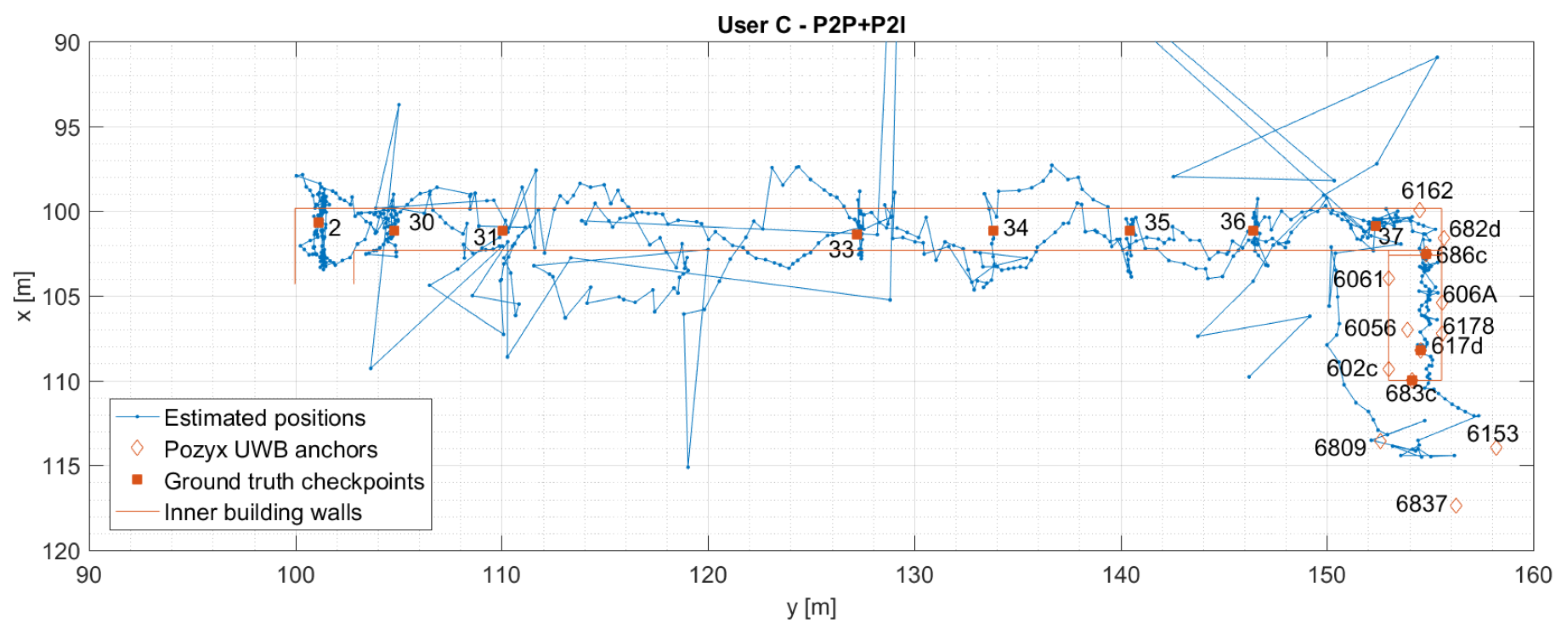
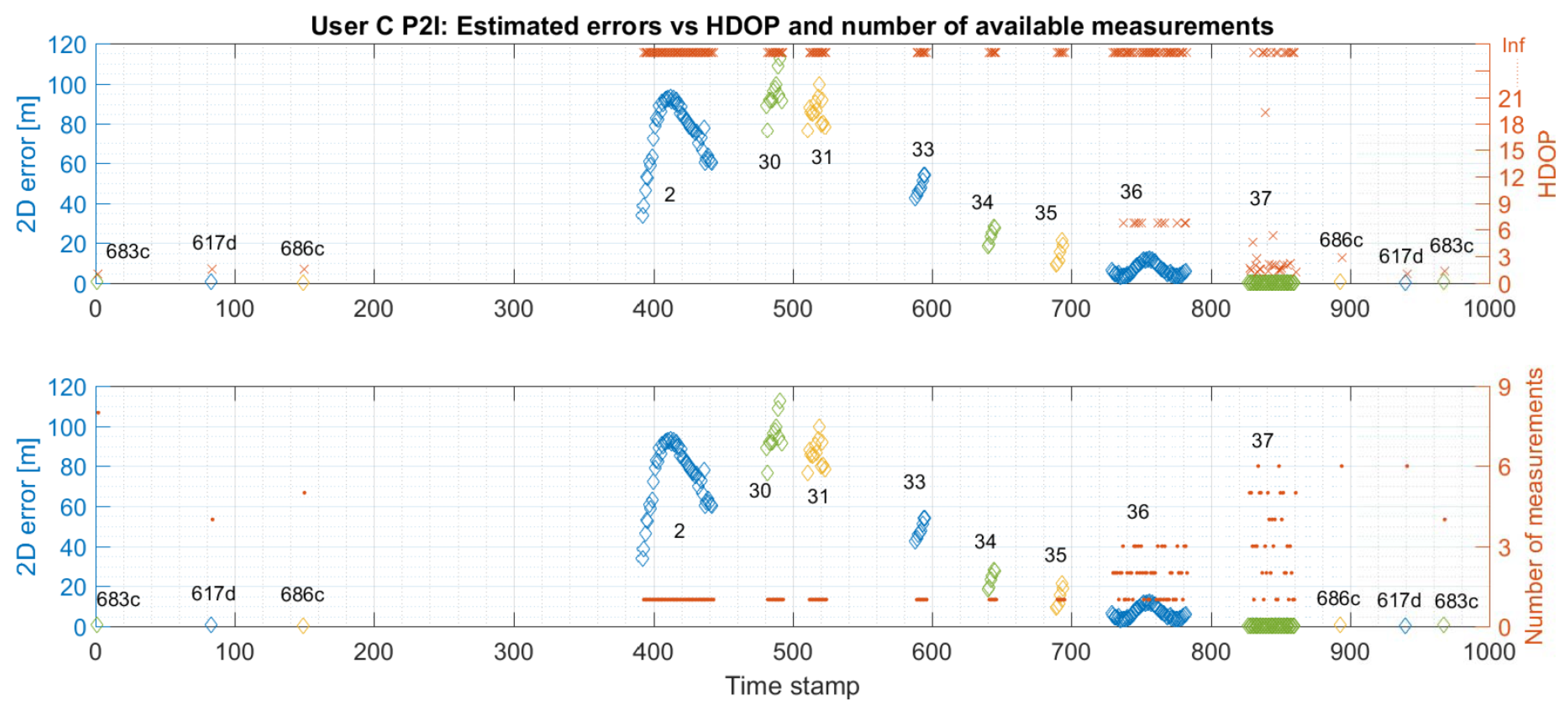
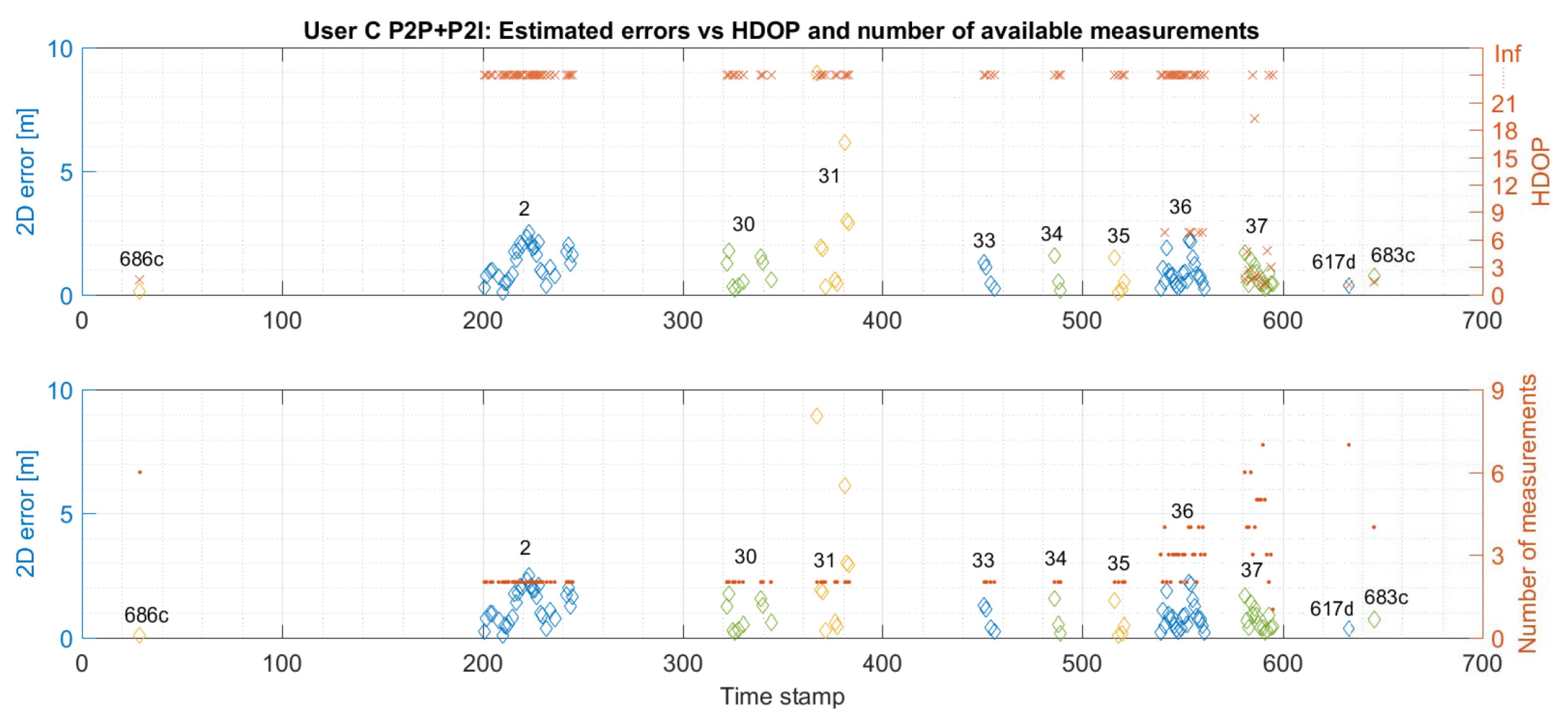
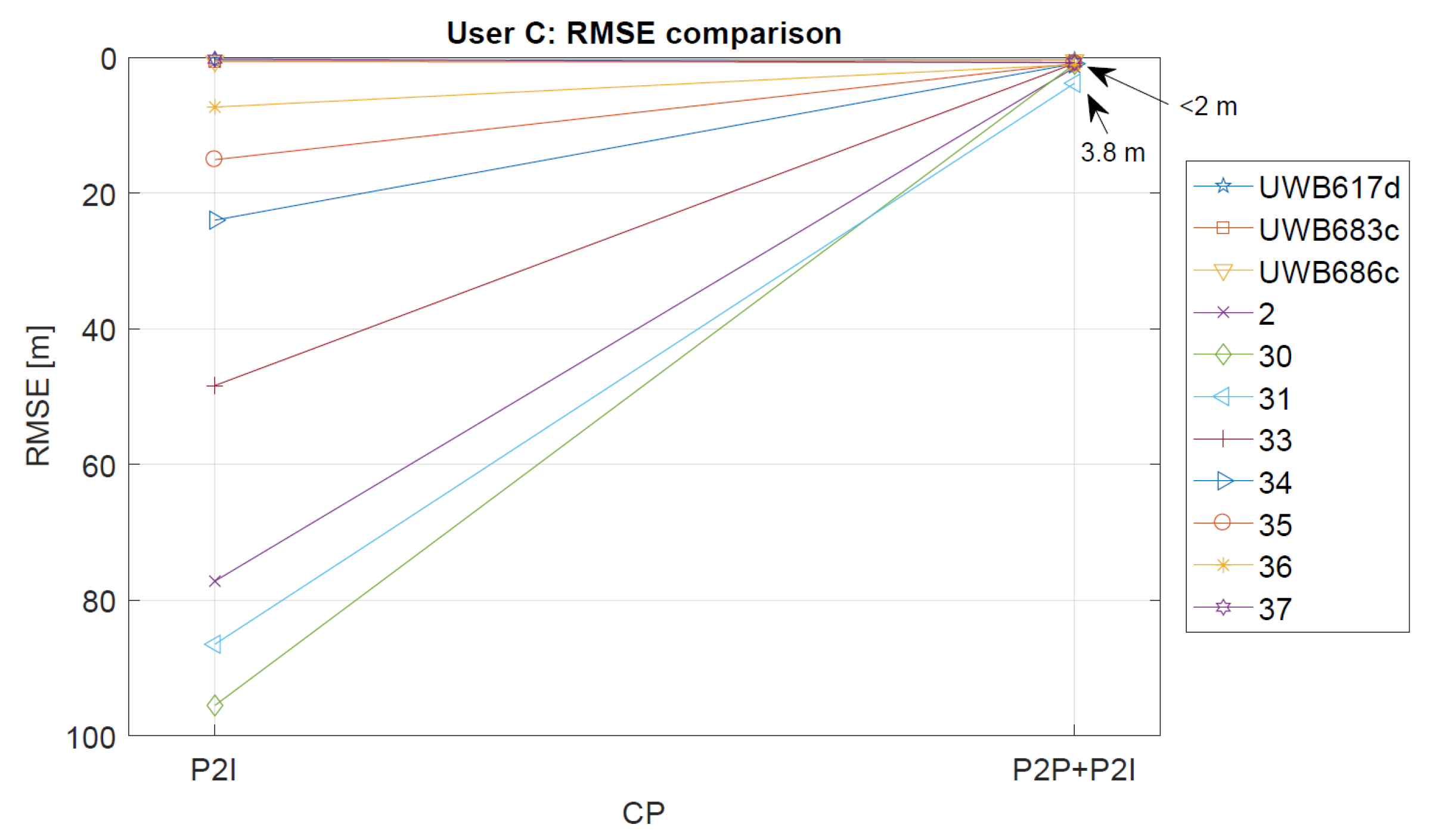
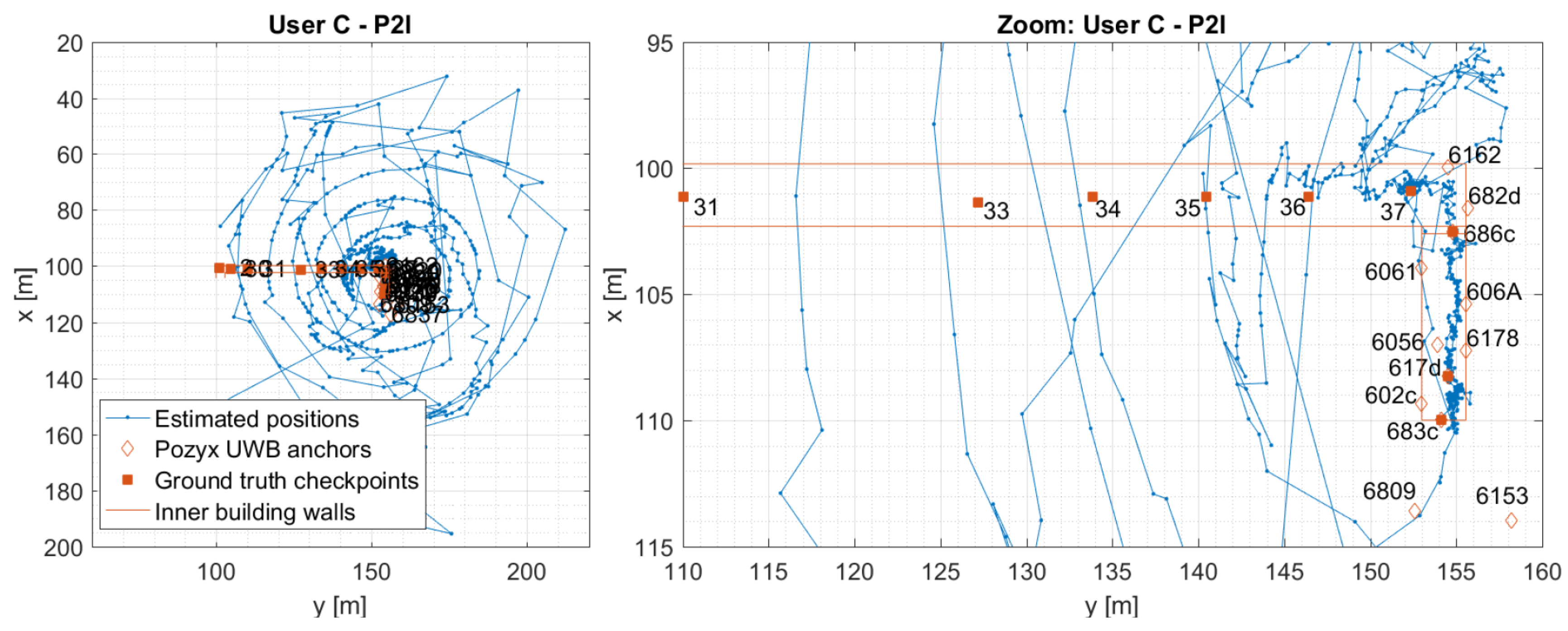
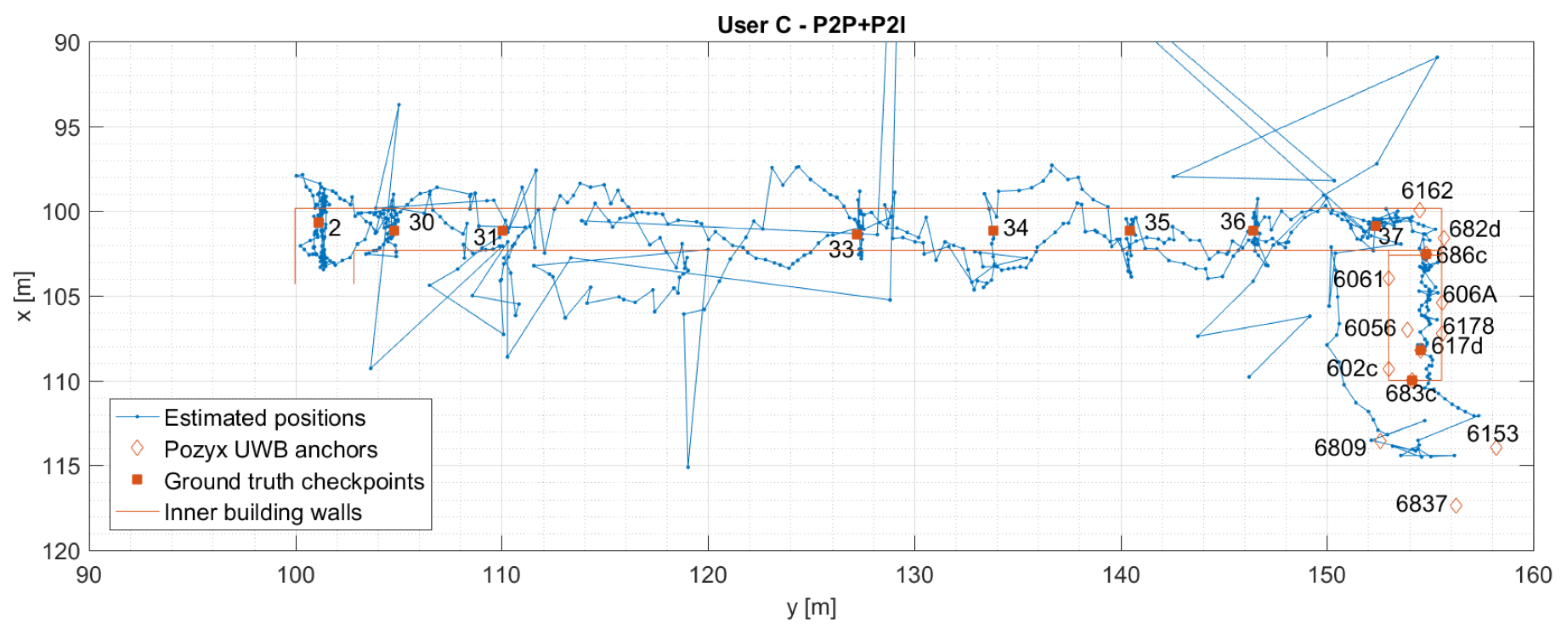
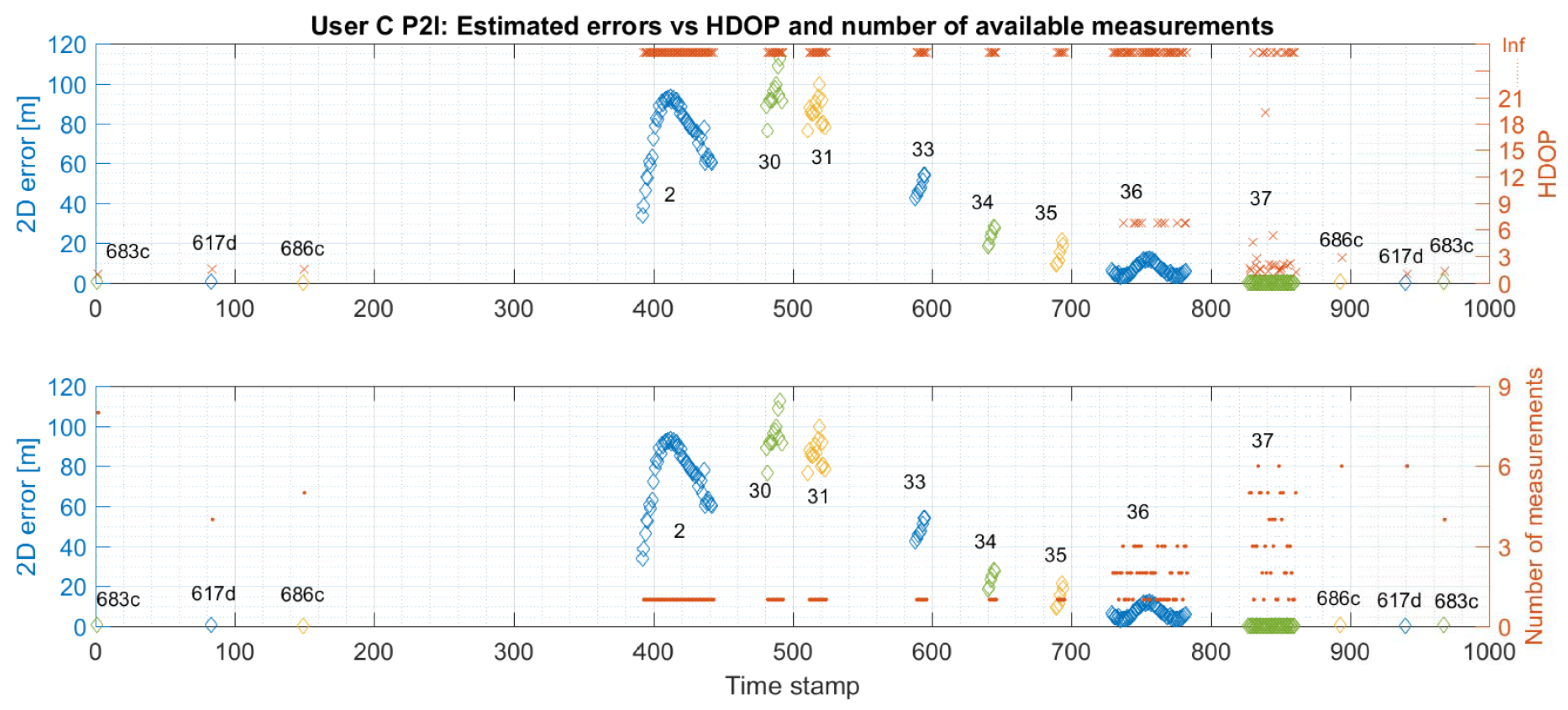
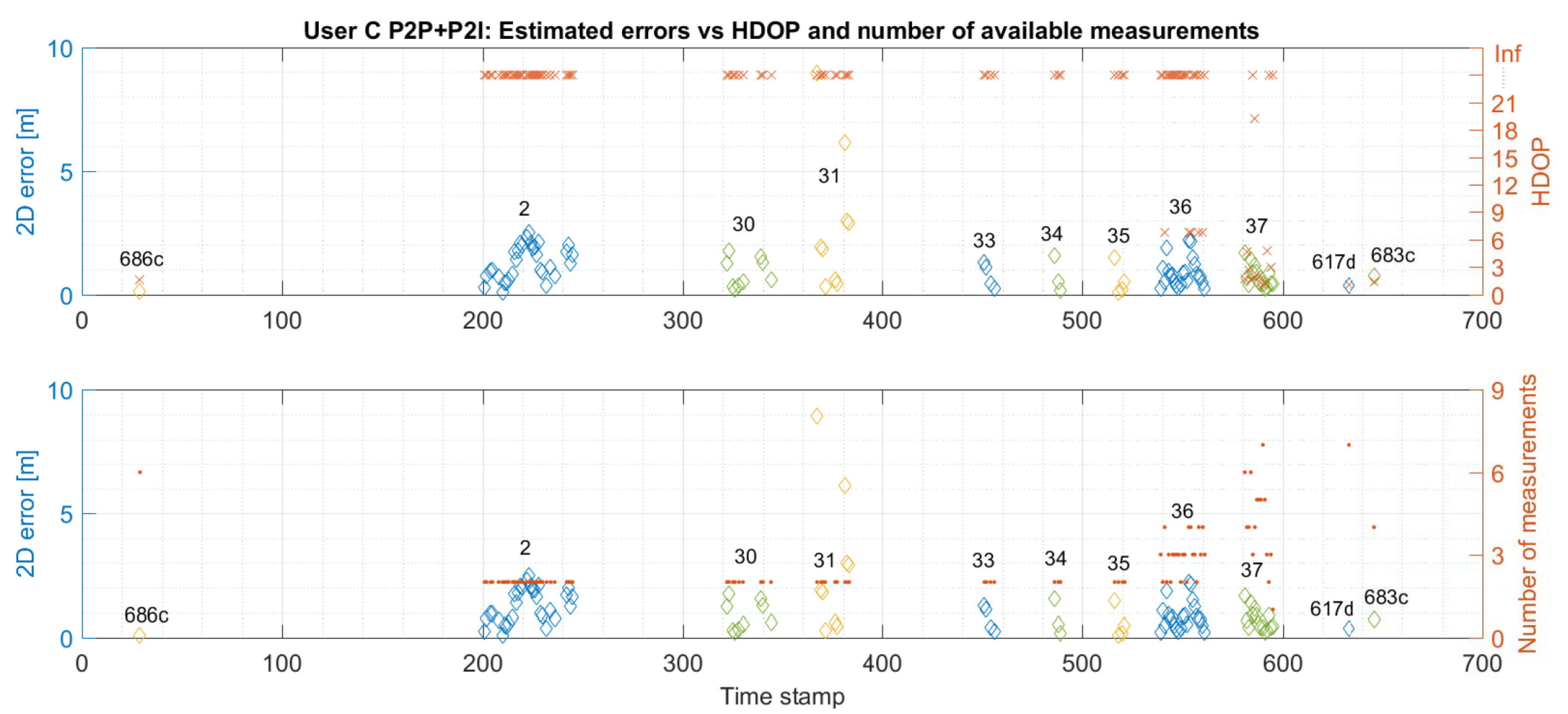
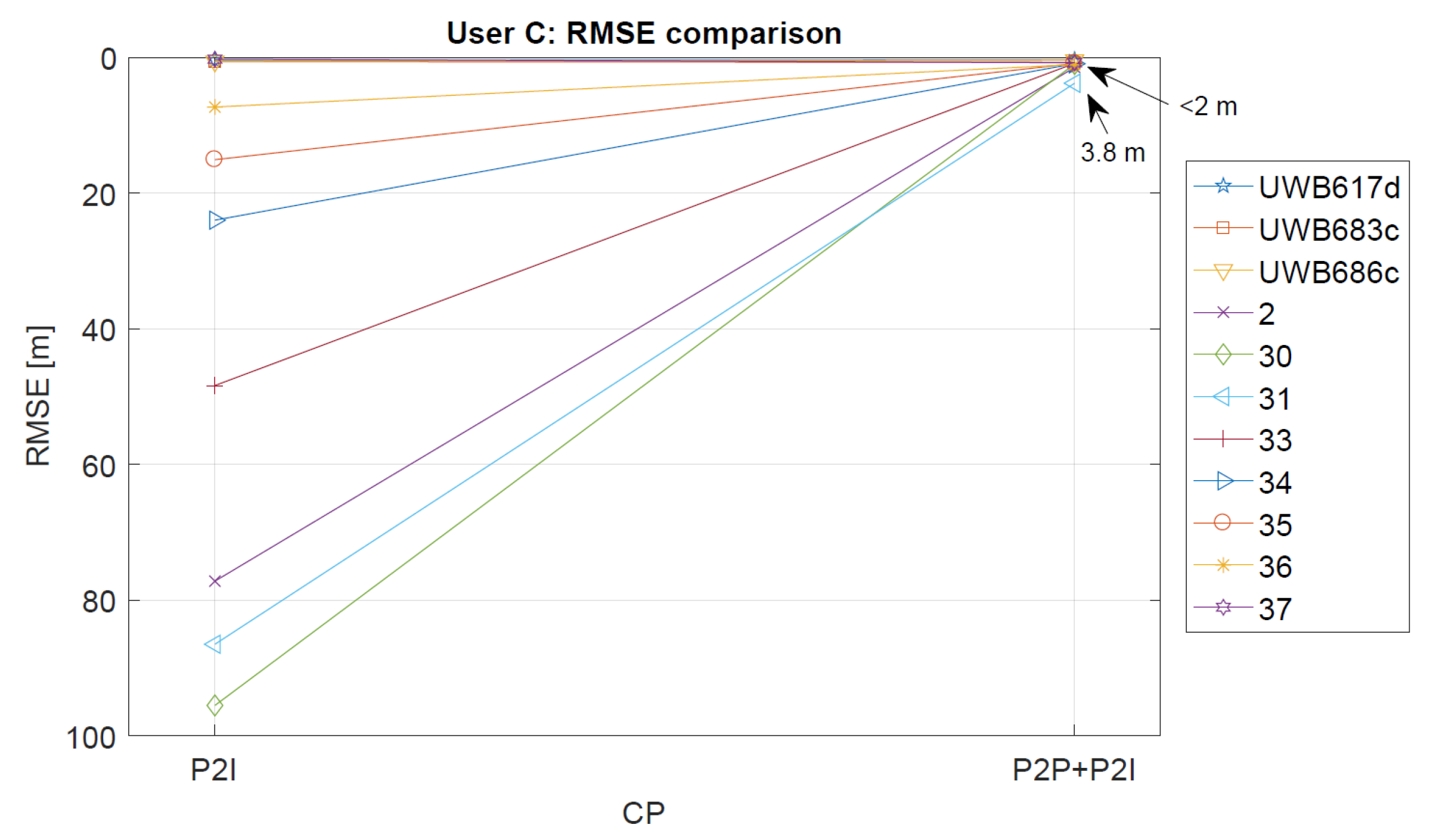
5.2. User C: P2I vs. P2P+P2I
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kealy, A.; Retscher, G.; Gabela, J.; Li, Y.; Goel, S.; Toth, C.K.; Masiero, A.; Błaszczak-Bąk, W.; Gikas, V.; Perakis, H.; et al. A Benchmarking Measurement Campaign in GNSS-denied/challenged Indoor/Outdoor and Transitional Environments. In Proceedings of the FIG Working Week, Hanoi, Vietnam, 22–26 April 2019; Available online: http://fig.net/resources/monthly_articles/2019/kealy_etal_july_2019.asp (accessed on 27 August 2019).
- Goel, S. Cooperative Localisation of Unmanned Aerial Vehicles using Low-Cost Sensors. Ph.D. Thesis, The University of Melbourne, Melbourne, Australia, 2017. [Google Scholar]
- Wan, J.; Zhong, L.; Zhang, F. Cooperative Localization of Multi-UAVs via Dynamic Nonparametric Belief Propagation under GPS Signal Loss Condition. Int. J. Distrib. Sens. Netw. 2014, 2014, 1–10. [Google Scholar] [CrossRef]
- Rantakokko, J.; Rydell, J.; Strömbäck, P.; Händel, P.; Callmer, J.; Törnqvist, D.; Gustafsson, F.; Jobs, M.; Grudén, M. Accurate and Reliable Soldier and First Responder Indoor Positioning: Multisensor Systems and Cooperative Localization. IEEE Wirel. Commun. 2011. [Google Scholar] [CrossRef]
- Conti, A.; Dardari, D.; Win, M.Z. Experimental results on cooperative UWB-based positioning systems. In Proceedings of the 2008 IEEE International Conference on Ultra-Wideband, Hannover, Germany, 10–12 September 2008; pp. 191–195. [Google Scholar]
- Alam, N.; Dempster, A.G. Cooperative Positioning for Vehicular Networks: Facts and Future. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1708–1717. [Google Scholar] [CrossRef]
- Bargshady, N.; Alsindi, N.A.; Pahlavan, K.; Ye, Y.; Akgul, F.O. Bounds on performance of hybrid WiFi-UWB cooperative RF localization for robotic applications. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Instanbul, Turkey, 26–30 September 2010; pp. 277–282. [Google Scholar]
- Chen, Y.; Yang, C. A RSSI-based algorithm for indoor localization using ZigBee in wireless sensor network. Int. J. Digit. Content Technol. Its Appl. 2006, 5, 407–416. [Google Scholar]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative localization in wireless networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Savic, V.; Zazo, S. Cooperative localization in mobile networks using nonparametric variants of belief propagation. Ad Hoc Netw. 2013, 11, 138–150. [Google Scholar] [CrossRef]
- Chen, X.; Gao, W.; Wang, J. Robust all-source positioning of UAVs-based on belief propagation. EURASIP J. Adv. Signal Process. 2013, 2013, 150. [Google Scholar] [CrossRef]
- Penna, F.; Caceres, M.A.; Wymeersch, H. Cramér-Rao Bound for Hybrid GNSS Terrestrial Cooperative Positioning. IEEE Commun. Lett. 2010, 14, 1005–1007. [Google Scholar] [CrossRef]
- Shi, X.; Wang, T.; Huang, B.; Zhao, C. Cooperative multi-robot localization-based on distributed UKF. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; Volume 6, pp. 590–593. [Google Scholar]
- Carrillo-Arce, L.C.; Nerurkar, E.D.; Gordillo, J.L.; Roumeliotis, S.I. Decentralized multi-robot cooperative localization using covariance intersection. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1412–1417. [Google Scholar]
- Hlinka, O.; Sluciak, O.; Hlawatsch, F.; Rupp, M. Distributed data fusion using iterative covariance intersection. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 1861–1865. [Google Scholar]
- Gabela, J.; Goel, S.; Kealy, A.; Hedley, M.; Moran, B.; Williams, S. Cramér Rao Bound Analysis for Cooperative Positioning in Intelligent Transportation Systems. In Proceedings of the 2018 International Global Navigation Satellite Systems (IGNSS) Symposium, Sydney, New South Wales, Australia, 7–9 February 2018; Available online: http://www.ignss2018.unsw.edu.au/sites/ignss2018/files/u80/Papers/IGNSS2018_paper_21.pdf (accessed on 20 August 2019).
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; De Clercq, D.; Hoebeke, J.; De Poorter, E. Experimental Evaluation of Uwb Indoor Positioning for Sport Postures. Sensors 2018. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.M.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Mazhar, F.; Gufran Khan, M.; Sällberg, B. Precise Indoor Positioning Using UWB: A Review of Methods, Algorithms and Implementations. Wirel. Personal Commun. 2017, 97, 4467–4491. [Google Scholar] [CrossRef]
- Chóliz, J.; Eguizabal, M.; Hernandez-Solana, A.; Valdovinos, A. Comparison of Algorithms for UWB Indoor Location and Tracking Systems. In Proceedings of the 2011 IEEE 73rd Conference on Vehicular Technology Conference (VTC Spring), Budapest, Hungary, 15–18 May 2011; pp. 1–5. [Google Scholar]
- Müller, P.; Wymeersch, H.; Piche, R. UWB Positioning with Generalized Gaussian Mixture Filters. EEE Trans. Mob. Comput. 2014, 13, 2406–2414. [Google Scholar] [CrossRef]
- Cheng, G. Accurate TOA-based UWB localization system in coal mine-based on WSN. Phys. Proced. 2012, 24, 534–540. [Google Scholar] [CrossRef]
- Bharadwaj, R.; Swaisaenyakorn, S.; Parini, C.G.; Batchelor, J.; Alomainy, A. Localization of Wearable Ultrawideband Antennas for Motion Capture Applications. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 507–510. [Google Scholar] [CrossRef]
- Goel, S.; Kealy, A.; Lohani, B. Development and Experimental Evaluation of Low-Cost Cooperative UAV Localization Network Prototype. J. Sens. Actuator Netw. 2018, 7. [Google Scholar] [CrossRef]
- Goel, S. A Distributed Cooperative UAV Swarm Localization System: Development and Analysis. In Proceedings of the 30 International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 2501–2518. [Google Scholar]
- Xu, B.; Sun, G.; Yu, R.; Yang, Z. High-Accuracy TDOA-Based Localization without Time Synchronization. IEEE Trans. Parallel Distrib. Syst. 2013. [Google Scholar] [CrossRef]
- Mirza, R.; Tehseen, A.; Kumar, A. An Indoor Navigation Approach to Aid the Physically Disabled People. In Proceedings of the 2012 International Conference on Computing, Electronics and Electrical Technologies (ICCEET), Kumaracoil, India, 21–22 March 2012; pp. 979–983. [Google Scholar]
- Baum, M. RTL in Longueuil Selects Bus Yard Management Solution Provided by Solotech, ISR Transit and Ubisense. Ubisense Report. 2011. Available online: http://www.prweb.com/releases/2011/10/prweb8849144.htm (accessed on 29 November 2019).
- Ravikrishnan, H. Ultra-Wideband Position Tracking on an Assembly Line. Ph.D. Thesis, Clemson University, Clemson, SC, USA, 2014. [Google Scholar]
- Zhu, D.; Yi, K. EKF Localization-based on TDOA/RSS in Underground Mines Using UWB Ranging. In Proceedings of the 2011 IEEE International Conference on Signal Processing, Communications and Computing, ICSPCC 2011, Xi’an, China, 14–16 September 2011. [Google Scholar] [CrossRef]
- Tiemann, J.; Wietfeld, C. Scalable and Precise Multi-UAV Indoor Navigation Using TDOA-Based UWB Localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation, IPIN 2017, Sapporo, Japan, 18–21 September 2017. [Google Scholar] [CrossRef]
- Zandian, R.; Witkowski, U. Robot Self-Localization in Ultra-Wideband Large Scale Multi-Node Setups. In Proceedings of the 14th Workshop on Positioning, Navigation and Communications, WPNC 2017, Bremen, Germany, 25–26 October 2017. [Google Scholar] [CrossRef]
- Xu, J.; Ma, M.; Law, C. AOA Cooperative Position Localization. In Proceedings of the Global Telecommunications Conference, IEEE GLOBECOM 2008, New Orleans, LO, USA, 30 November–4 December 2008; pp. 1–5. [Google Scholar]
- Mok, E.; Xia, L.; Retscher, G.; Tian, H. A Case Study on the Feasibility and Performance of an UWB-AoA Real Time Location System for Resources Management of Civil Construction Projects. J. Appl. Geod. 2010, 4, 23–32. [Google Scholar] [CrossRef]
- Dimension4, Ubisense. Available online: https://www.ubisense.net/product/dimension4 (accessed on 6 November 2019).
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the Nodes: Cooperative Localization in Wireless Sensor Networks. IEEE Signal Process. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Retscher, G.; Tatschl, T. Indoor Positioning with Differential Wi-Fi Lateration. J. Appl. Geod. 2017, 11, 249–269. [Google Scholar] [CrossRef]
- Leitinger, E.; Fröhle, M.; Meissner, P.; Witrisal, K. Multipath-assisted Maximum-likelihood Indoor Positioning using UWB Signals. In Proceedings of the 2014 IEEE International Conference on Communications Workshops (ICC), Sydney, Australia, 10–14 June 2014; pp. 170–175. [Google Scholar]
- McCracken, M.; Bocca, M.; Patwari, N. Joint Ultra-wideband and Signal Strength-based Through-building Tracking for Tactical Operations. In Proceedings of the 2013 10th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), New Orleans, LA, USA, 24–27 June 2013; pp. 309–317. [Google Scholar]
- Gigl, T.; Janssen, G.; Dizdarevic, V.; Witrisal, K.; Irahhauten, Z. Analysis of a UWB Indoor Positioning System-based on Received Signal Strength. In Proceedings of the 4th Workshop on Positioning, Navigation and Communication, WPNC ’07, Hannover, Germany, 22 March 2007; pp. 97–101. [Google Scholar]
- Pittet, S.; Renaudin, V.; Merminod, B.; Kasser, M. UWB and MEMS-based indoor navigation. J. Navig. 2008, 61, 369–384. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Q.; Xiong, J.; Huang, W.; Peng, H. Indoor and Outdoor Cooperative Real-Time Positioning System. J. Theor. Appl. Inf. Technol. 2013, 48, 1066–1073. [Google Scholar]
- Jiang, X.; Zhang, H.; Wang, W. NLOS Error Mitigation with Information Fusion Algorithm for UWB Ranging Systems. J. China Univ. Posts Telecommun. 2012, 19, 22–29. [Google Scholar] [CrossRef]
- Taponecco, L.; D’Amico, A.A.; Mengali, U. Joint TOA and AOA Estimation for UWB Localization Applications. IEEE Trans. Wirel. Commun. 2011, 10, 2207–2217. [Google Scholar] [CrossRef]
- 320-0289E PulsON® 410 Data Sheet; TIME DOMAIN: Huntsville, AL, USA, November 2013.
- 320-0317D PulsON® 440 Data Sheet/User Guide; TIME DOMAIN: Huntsville, AL, USA, May 2017.
- Pozyx UWB System. Available online: https://www.pozyx.io/documentation (accessed on 24 August 2019).
- Perakis, H.; Gikas, V. Evaluation of Range Error Calibration Models for Indoor UWB Positioning Applications. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 206–212. [Google Scholar] [CrossRef]
- Masiero, A.; Fissore, F.; Guarnieri, A.; Pirotti, F.; Vettore, A. Aiding Indoor Photogrammetry with UWB Sensors. Photogramm. Eng. Remote Sens. 2019, 85, 369–378. [Google Scholar] [CrossRef]
- Masiero, A.; Fissore, F.; Antonello, R.; Cenedese, A.; Vettore, A. A Comparison of UWB and Motion Capture UAV Indoor Positioning. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 1695–1699. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley and Sons: New York, NY, USA, 2001; Chapter 10; pp. 371–420. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Time Domain | Pozyx |
|---|---|---|
| Dimensions | mm | mm |
| Weight | 58 g | 12 g |
| Ranging Accuracy | ∼2–3 cm | ∼10 cm |
| Other sensors | - | 9-axes IMU |
| Pressure sensor |
| User Z | P2I | P2P+P2I | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Point ID | RMSE | Avg | Max | Avg | Max | RMSE | Avg | Max | Avg | Max |
| [m] | [m] | [m] | HDOP | HDOP | [m] | [m] | [m] | HDOP | HDOP | |
| UWB 100 | 0.66 | 0.61 | 0.86 | 2.31 | 2.47 | 0.43 | 0.42 | 0.50 | 1.87 | 2.27 |
| UWB 206 | 0.62 | 0.62 | 0.71 | 0.92 | 0.92 | 0.65 | 0.64 | 0.78 | 0.86 | 0.87 |
| 1 | 0.96 | 0.90 | 1.92 | 5.83 | 25.60 | 2.54 | 2.50 | 3.48 | 1.12 | 1.20 |
| 3 | 0.17 | 0.16 | 0.22 | 2.43 | 2.43 | 0.16 | 0.16 | 0.22 | 2.21 | 2.22 |
| 30 | 0.13 | 0.12 | 0.24 | 1.99 | 2.00 | 0.47 | 0.40 | 0.87 | 1.97 | 1.98 |
| 31 | 0.18 | 0.16 | 0.39 | 1.62 | 1.65 | 0.17 | 0.15 | 0.39 | 1.61 | 1.65 |
| 32 | 0.27 | 0.25 | 0.55 | 1.36 | 1.41 | 0.31 | 0.30 | 0.57 | 1.36 | 1.40 |
| 33 | 0.16 | 0.15 | 0.20 | 1.95 | 1.96 | 0.16 | 0.16 | 0.21 | 1.93 | 1.94 |
| 34 | 0.71 | 0.51 | 2.34 | 2.24 | 2.86 | 0.73 | 0.53 | 2.25 | 2.24 | 2.85 |
| 35 | 1.27 | 1.03 | 3.62 | 4.36 | 11.40 | 1.04 | 0.73 | 3.49 | 4.30 | 11.35 |
| 36 | 1.71 | 1.63 | 2.74 | 1.12 | 1.22 | 0.90 | 0.77 | 1.61 | 1.09 | 1.17 |
| 37 | 0.68 | 0.64 | 1.14 | 1.09 | 1.21 | 0.68 | 0.64 | 1.14 | 0.87 | 1.21 |
| User C | P2I | P2P+P2I | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Point ID | RMSE | Avg | Max | Avg | Max | RMSE | Avg | Max | Avg | Max |
| [m] | [m] | [m] | HDOP | HDOP | [m] | [m] | [m] | HDOP | HDOP | |
| UWB 617d | 0.45 | 0.44 | 0.52 | 1.33 | 1.61 | 0.36 | 0.36 | 0.36 | 1.05 | 1.05 |
| UWB 683c | 0.64 | 0.63 | 0.75 | 1.20 | 1.35 | 0.74 | 0.74 | 0.74 | 1.35 | 1.35 |
| UWB 686c | 0.61 | 0.52 | 0.84 | 2.23 | 2.89 | 0.41 | 0.34 | 0.57 | 1.57 | 1.57 |
| 2 | 77.22 | 75.77 | 93.29 | Inf * | Inf | 1.49 | 1.33 | 2.50 | Inf | Inf |
| 30 | 95.54 | 95.13 | 112.53 | Inf | Inf | 0.99 | 0.83 | 1.76 | Inf | Inf |
| 31 | 86.52 | 86.29 | 99.78 | Inf | Inf | 3.82 | 2.78 | 8.96 | Inf | Inf |
| 33 | 48.35 | 48.20 | 54.19 | Inf | Inf | 0.90 | 0.80 | 1.29 | Inf | Inf |
| 34 | 24.01 | 23.72 | 28.25 | Inf | Inf | 0.95 | 0.75 | 1.55 | Inf | Inf |
| 35 | 15.09 | 14.38 | 21.22 | Inf | Inf | 0.91 | 0.71 | 1.49 | Inf | Inf |
| 36 | 7.33 | 6.73 | 12.24 | Inf | Inf | 1.07 | 0.88 | 2.21 | Inf | Inf |
| 37 | 0.28 | 0.27 | 0.46 | Inf | Inf | 0.80 | 0.70 | 1.67 | Inf | Inf |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gabela, J.; Retscher, G.; Goel, S.; Perakis, H.; Masiero, A.; Toth, C.; Gikas, V.; Kealy, A.; Koppányi, Z.; Błaszczak-Bąk, W.; et al. Experimental Evaluation of a UWB-Based Cooperative Positioning System for Pedestrians in GNSS-Denied Environment. Sensors 2019, 19, 5274. https://doi.org/10.3390/s19235274
Gabela J, Retscher G, Goel S, Perakis H, Masiero A, Toth C, Gikas V, Kealy A, Koppányi Z, Błaszczak-Bąk W, et al. Experimental Evaluation of a UWB-Based Cooperative Positioning System for Pedestrians in GNSS-Denied Environment. Sensors. 2019; 19(23):5274. https://doi.org/10.3390/s19235274
Chicago/Turabian StyleGabela, Jelena, Guenther Retscher, Salil Goel, Harris Perakis, Andrea Masiero, Charles Toth, Vassilis Gikas, Allison Kealy, Zoltán Koppányi, Wioleta Błaszczak-Bąk, and et al. 2019. "Experimental Evaluation of a UWB-Based Cooperative Positioning System for Pedestrians in GNSS-Denied Environment" Sensors 19, no. 23: 5274. https://doi.org/10.3390/s19235274
APA StyleGabela, J., Retscher, G., Goel, S., Perakis, H., Masiero, A., Toth, C., Gikas, V., Kealy, A., Koppányi, Z., Błaszczak-Bąk, W., Li, Y., & Grejner-Brzezinska, D. (2019). Experimental Evaluation of a UWB-Based Cooperative Positioning System for Pedestrians in GNSS-Denied Environment. Sensors, 19(23), 5274. https://doi.org/10.3390/s19235274