Intelligent Detection of a Planetary Gearbox Composite Fault Based on Adaptive Separation and Deep Learning †

Abstract
:1. Introduction
2. Method Theory
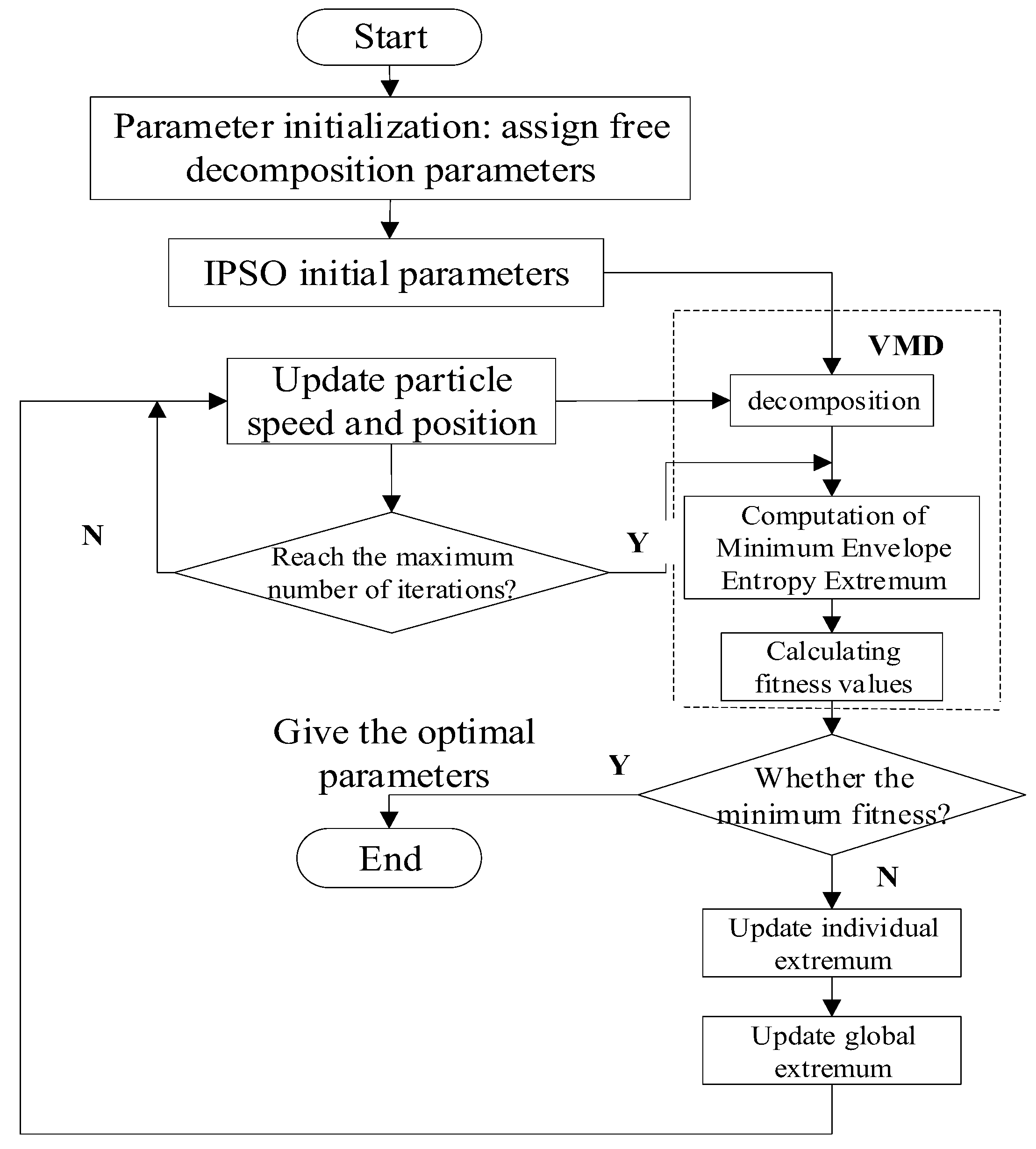
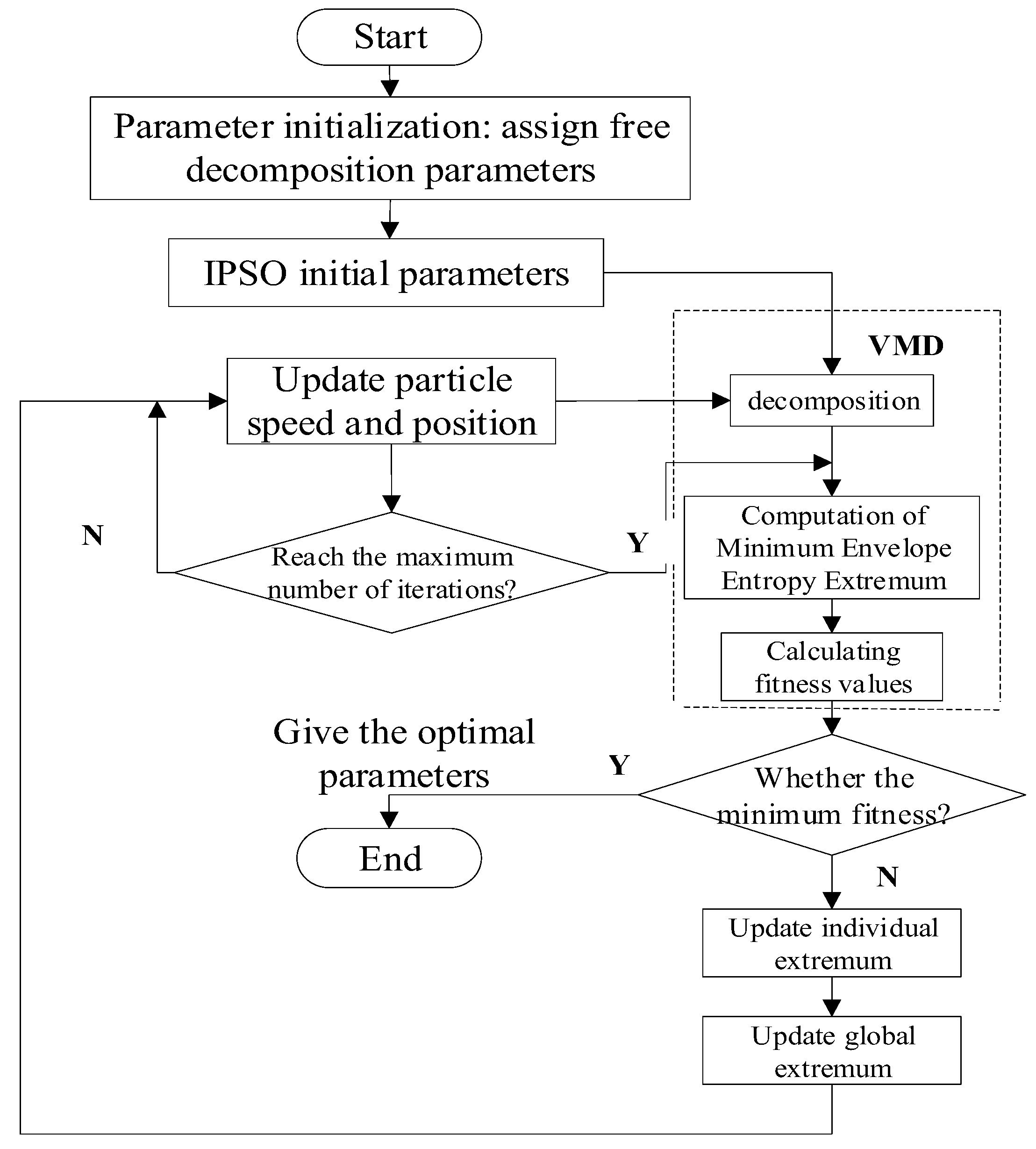
2.1. Improved PSO Optimized VMD
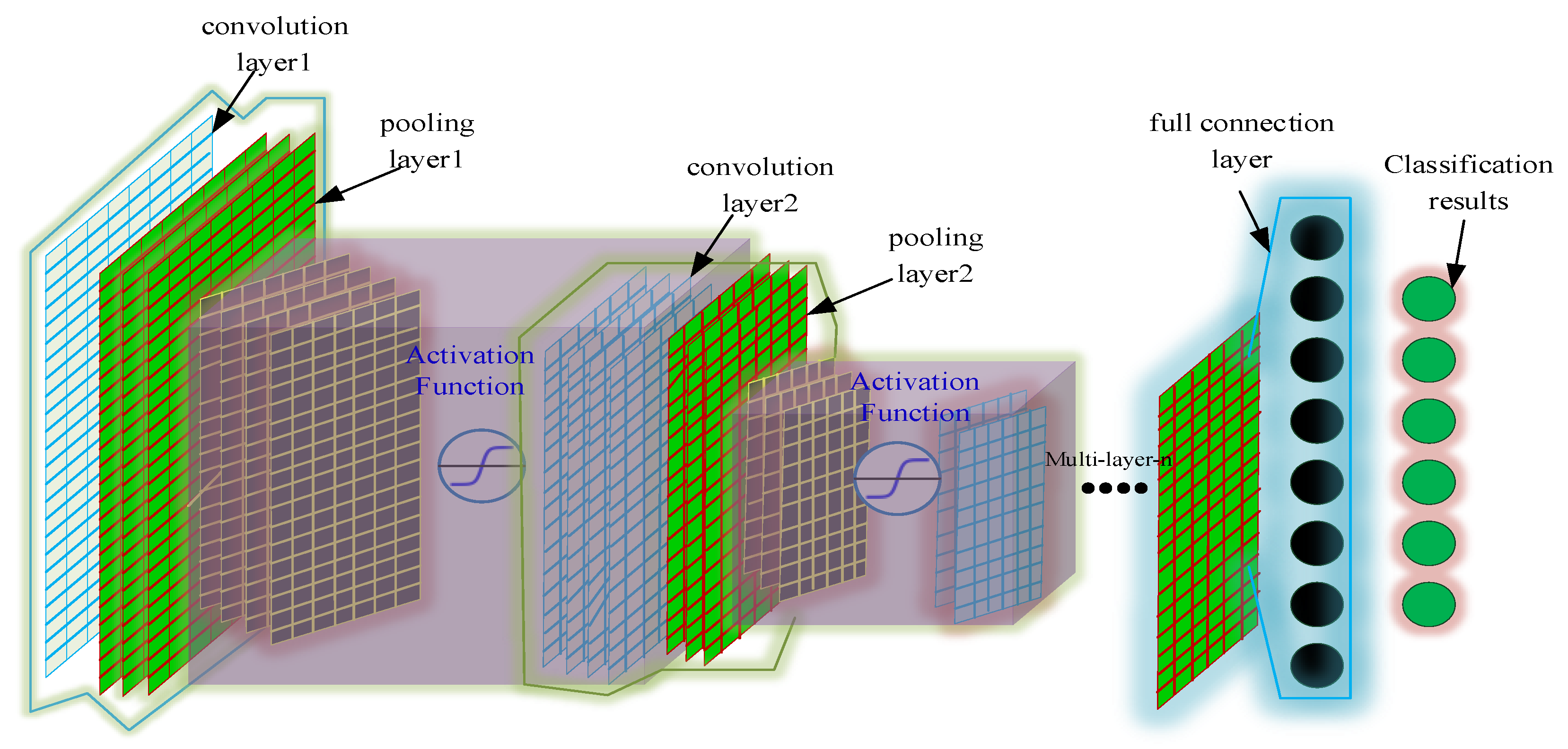
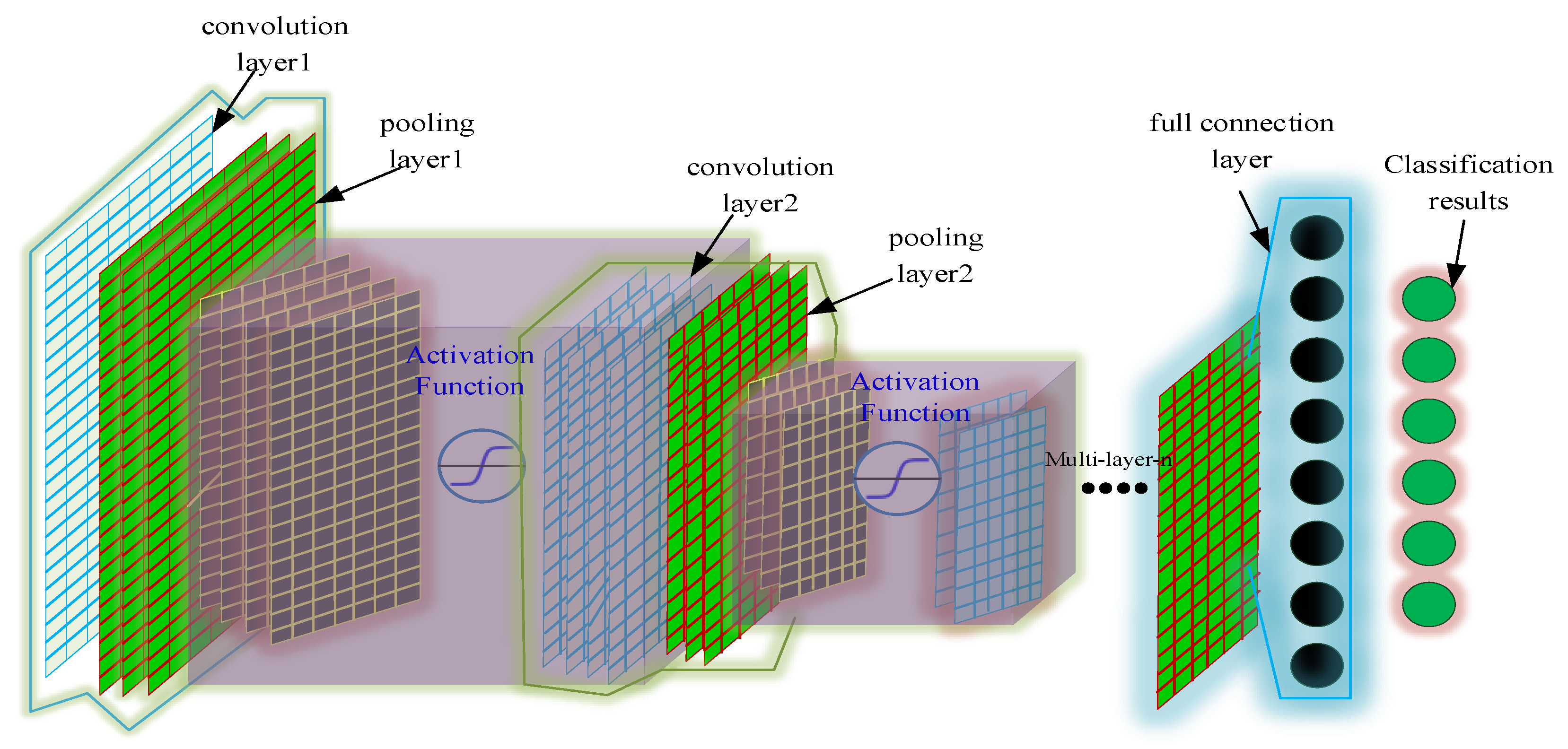
2.2. Improved Convolutional Neural Network Theory
Pooling Layer Improvement
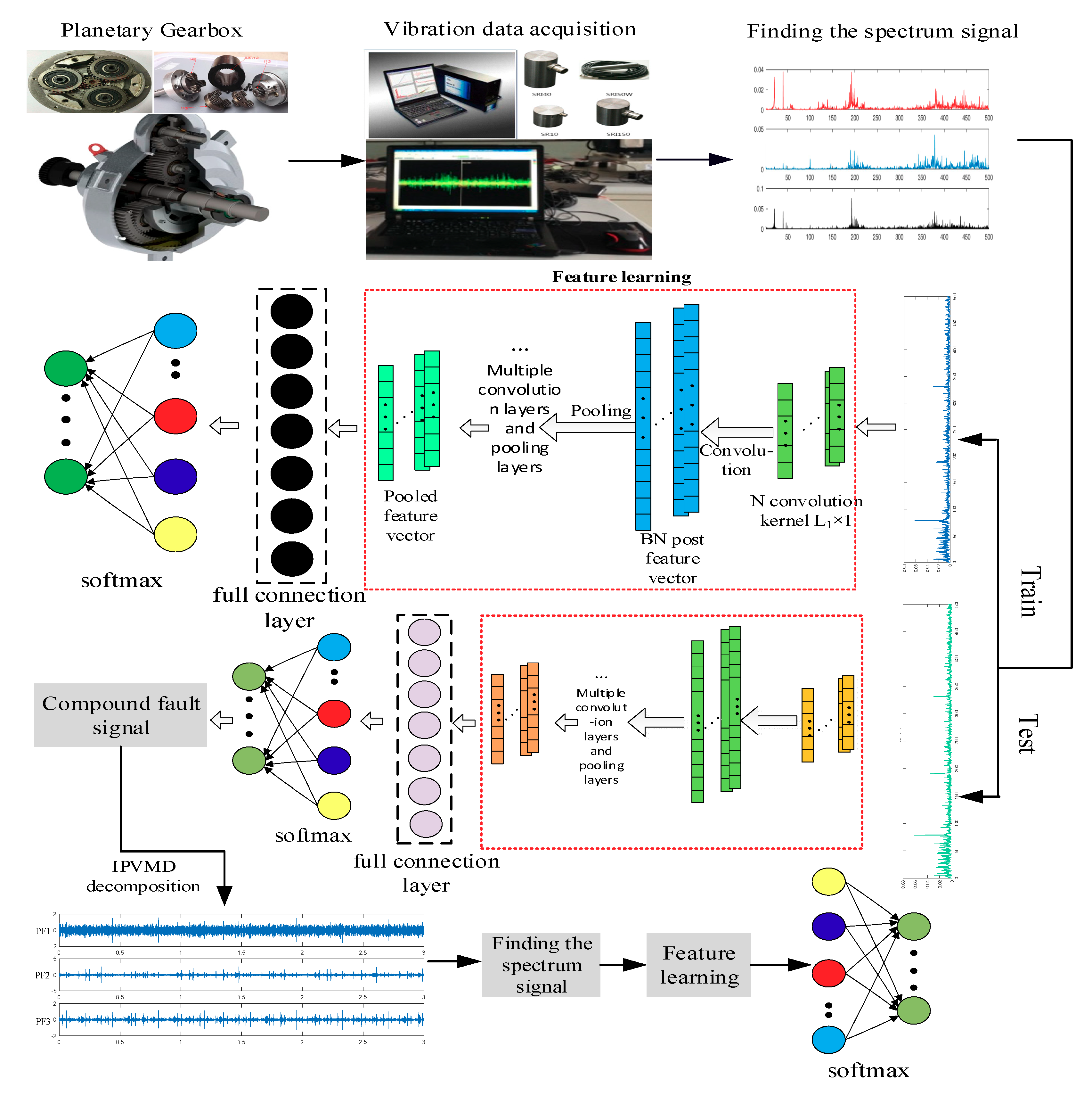
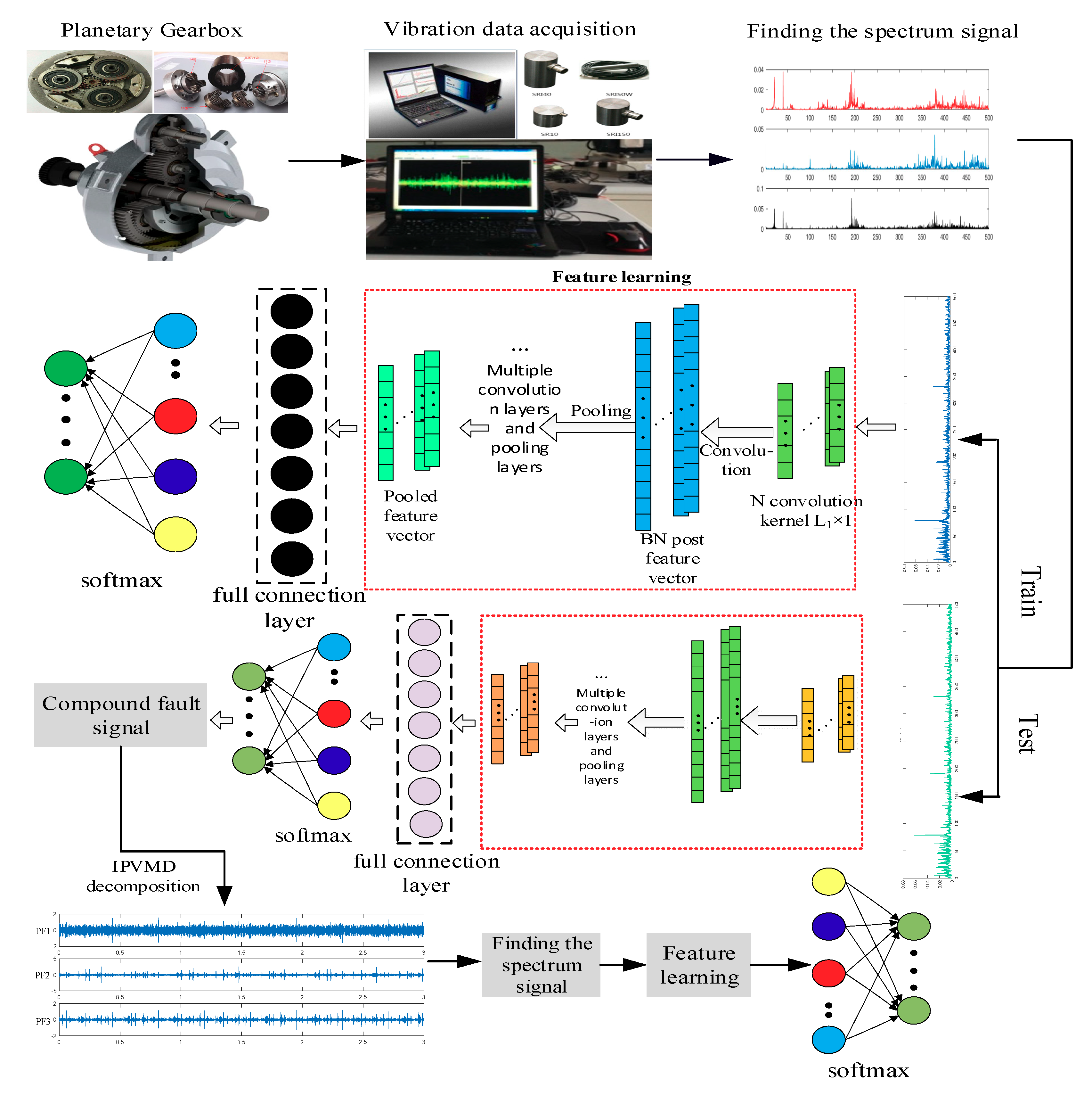
2.3. Intelligent Diagnosis Procedure of This Article
3. Results
3.1. Test Conditions and Fault Settings
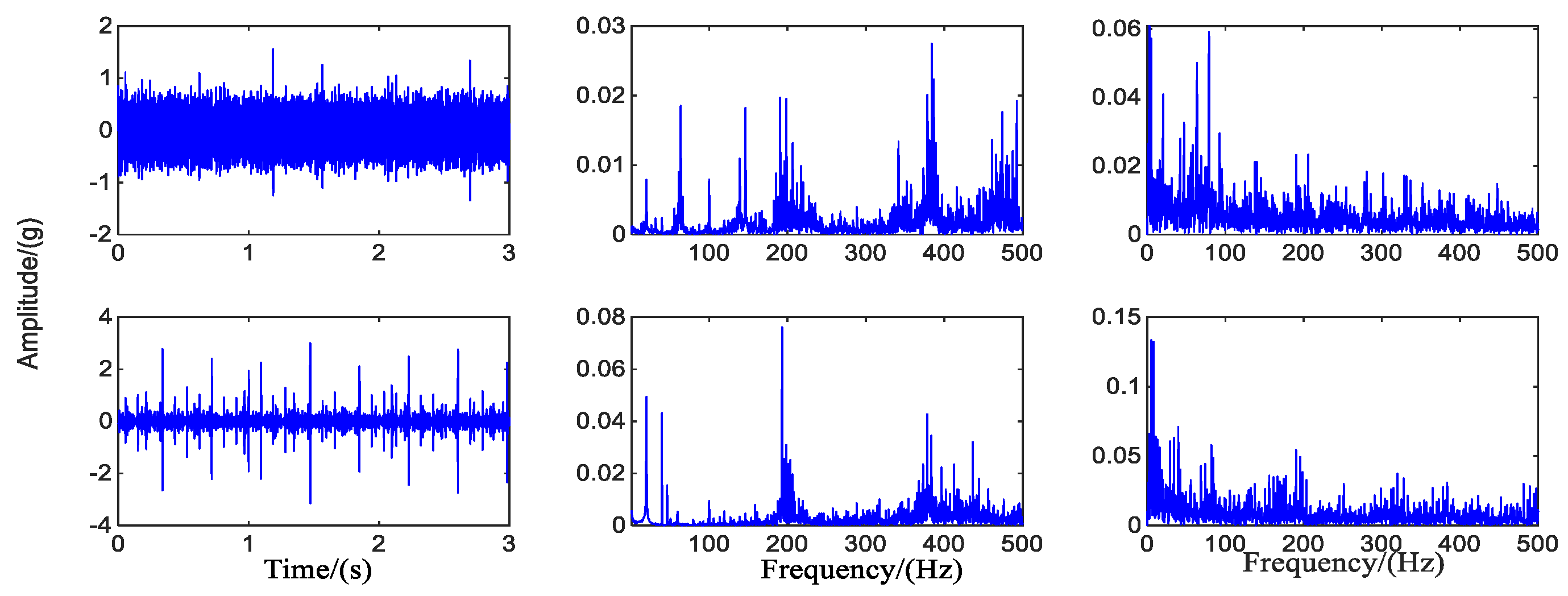
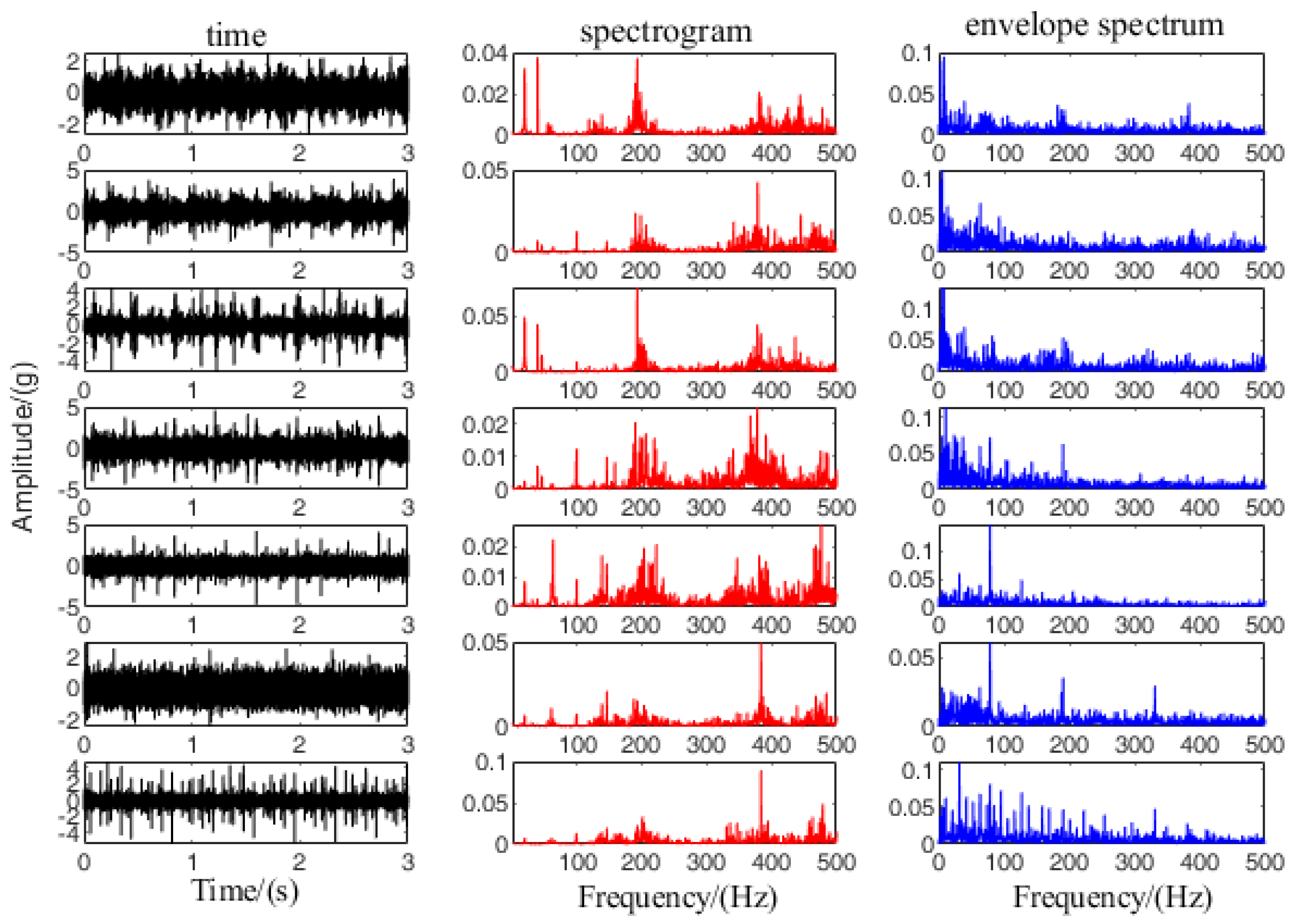
3.2. Data Description
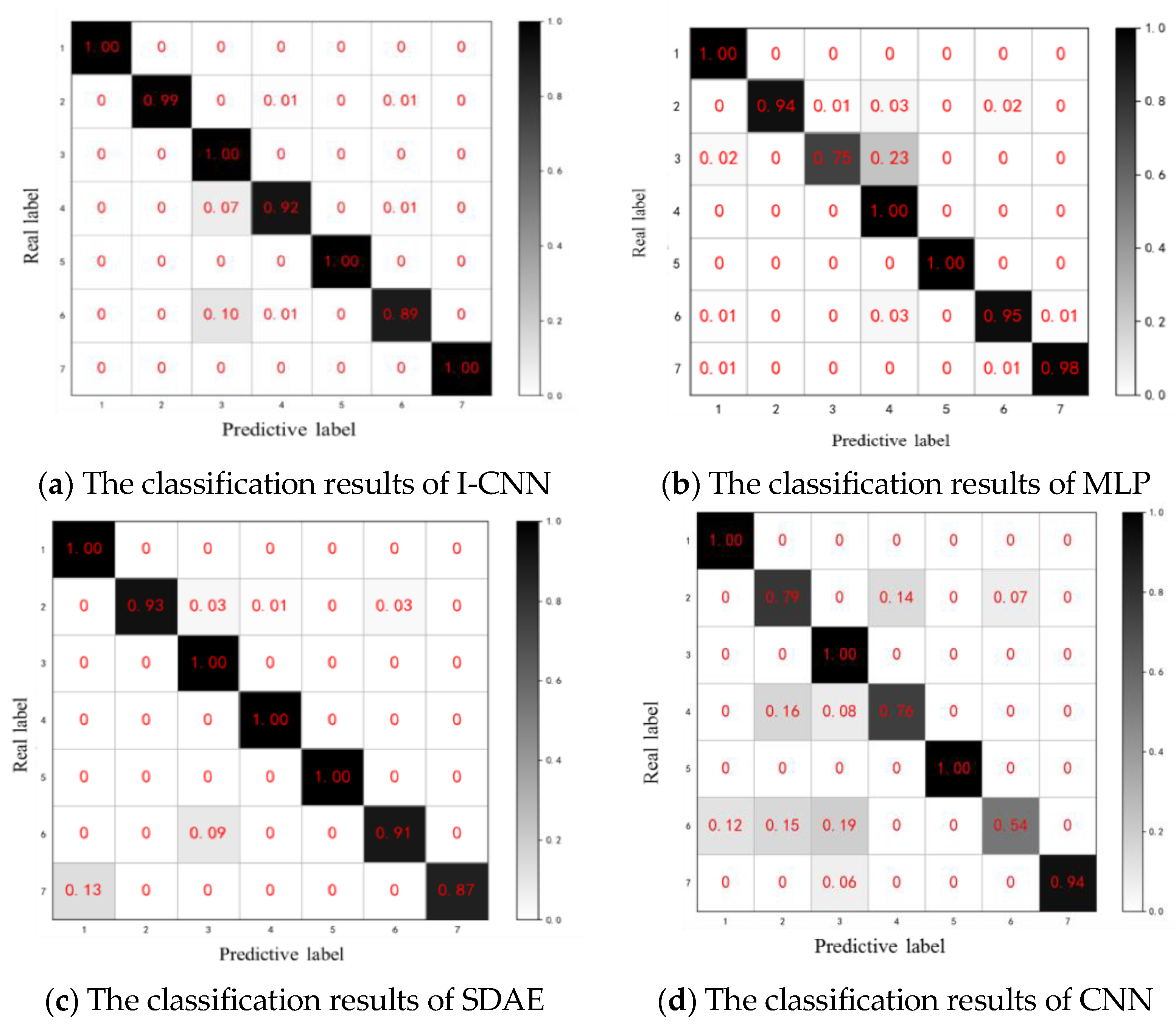
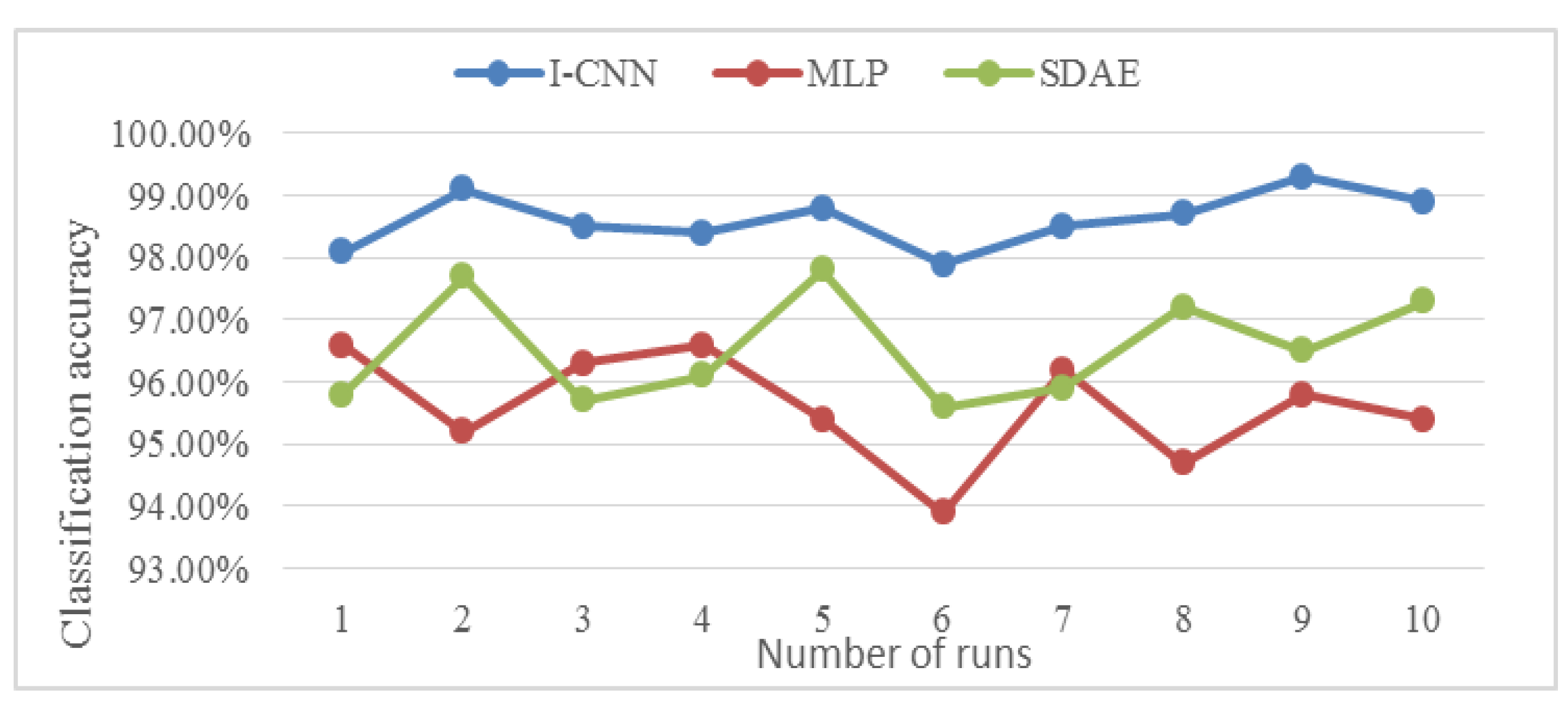
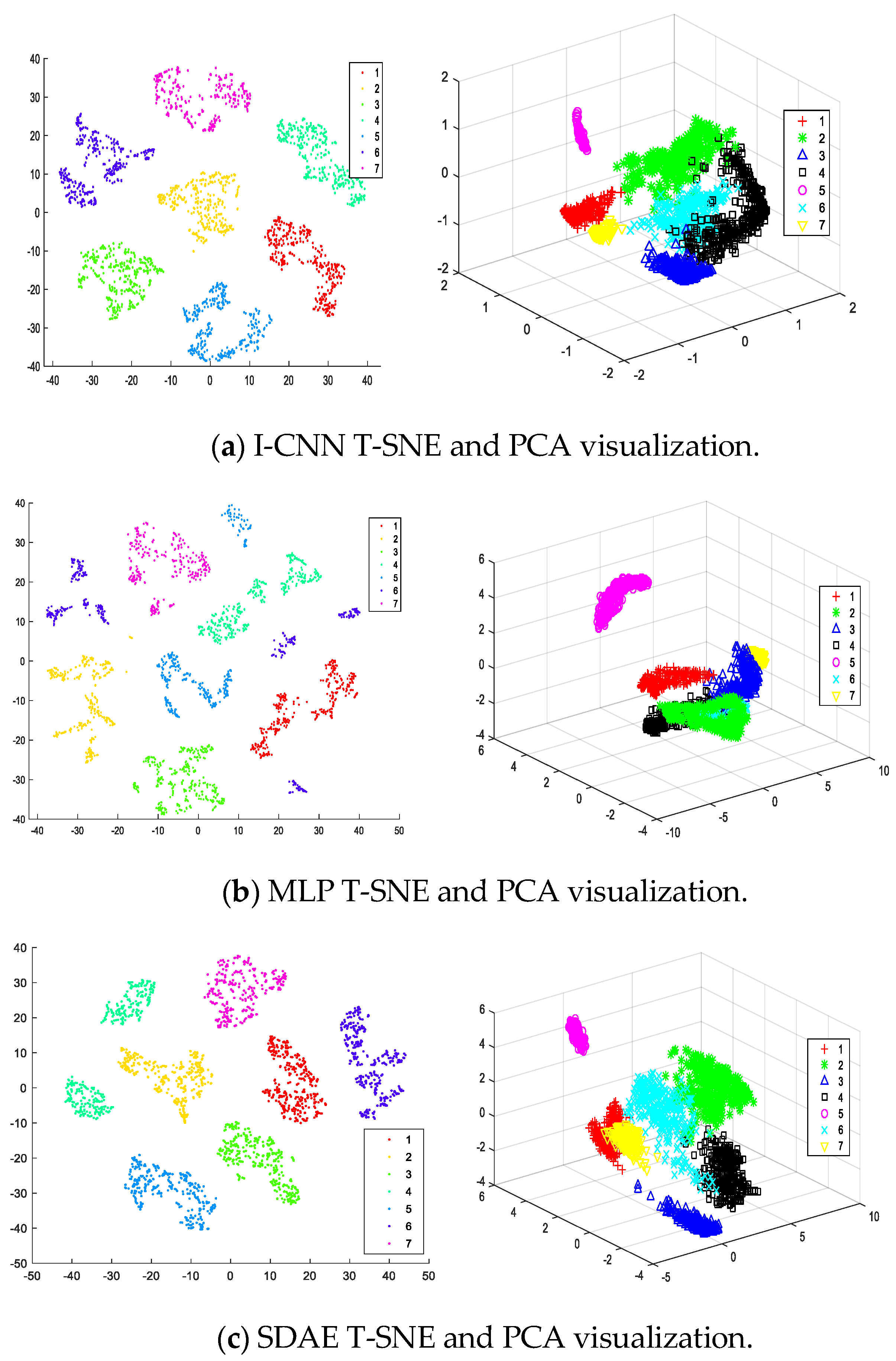
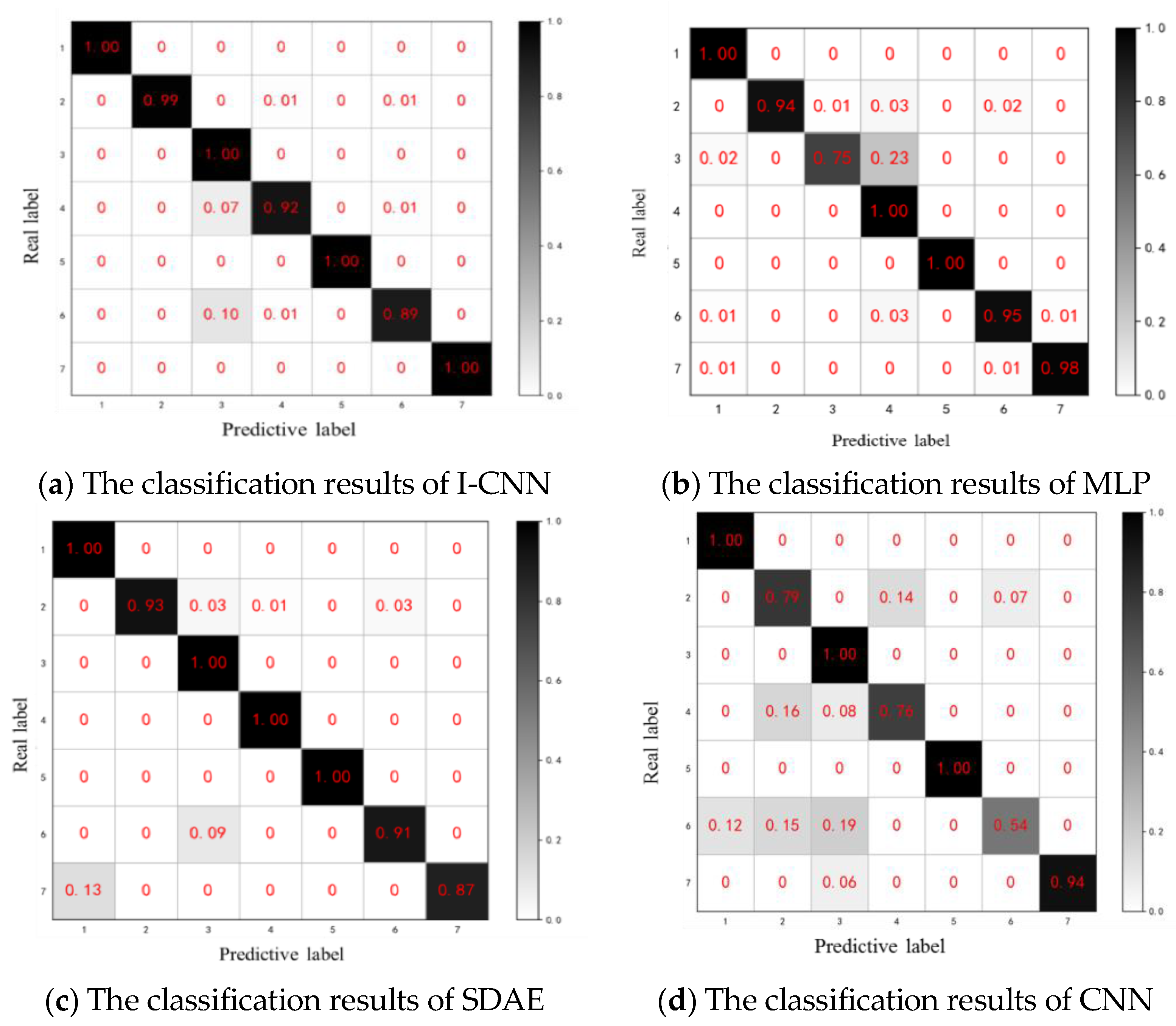
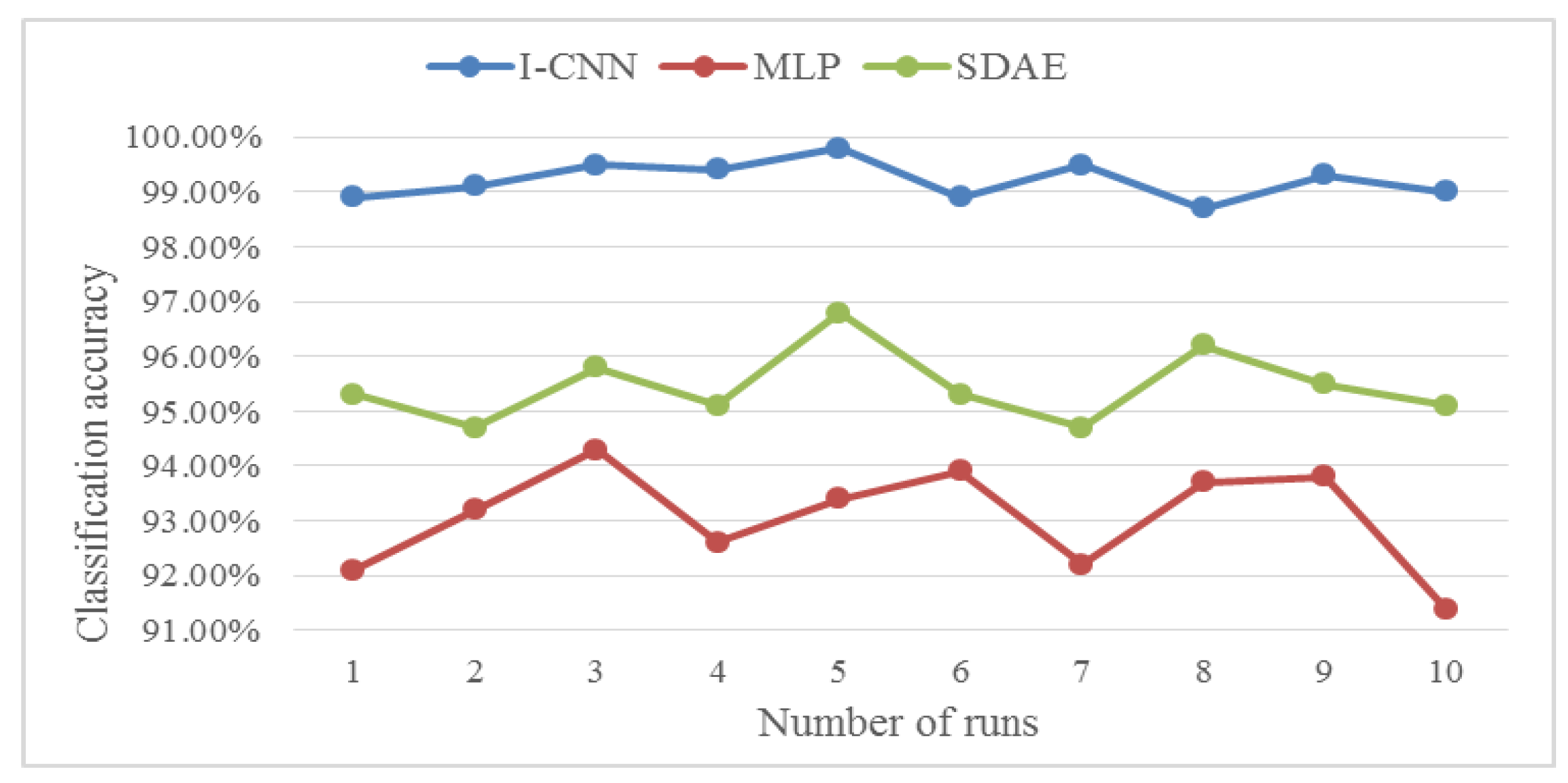
3.3. Experimental Results and Analysis
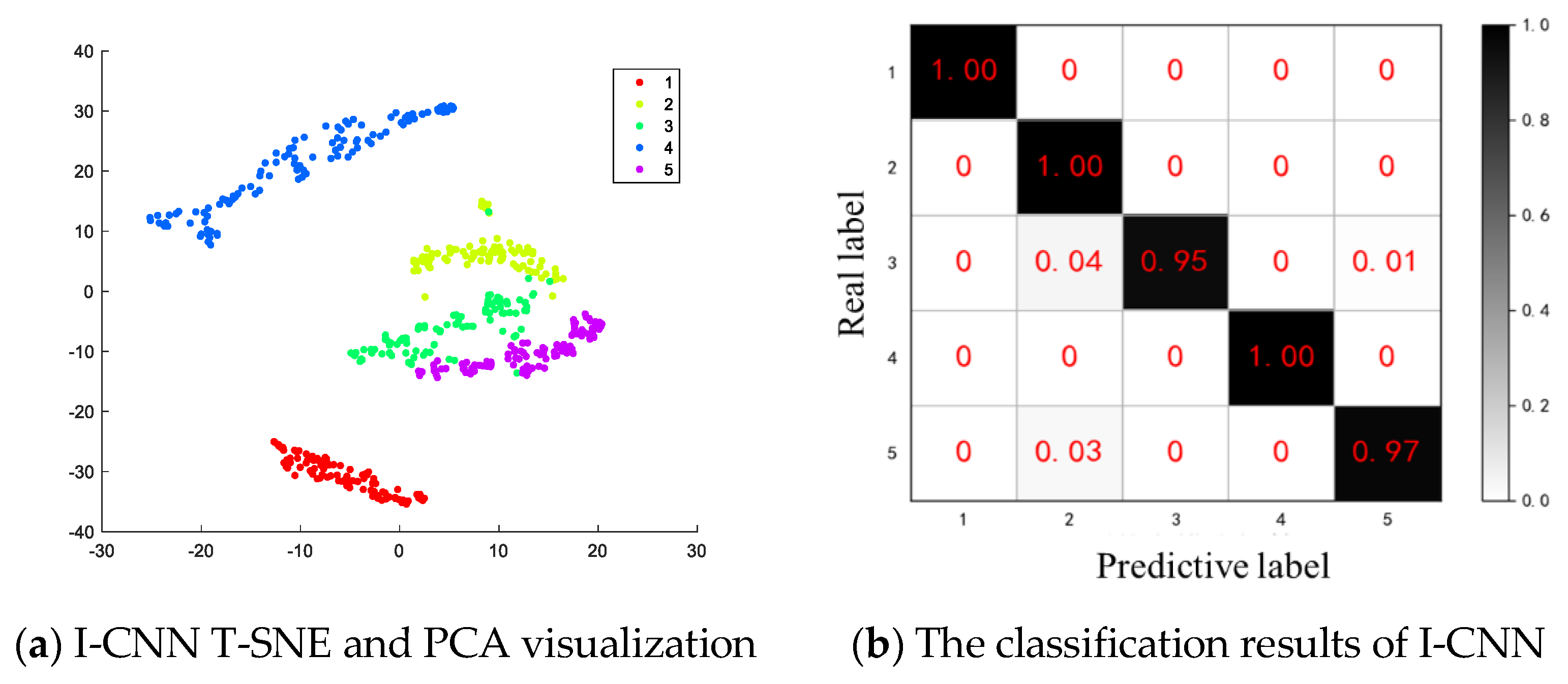
3.3.1. Data Set 1 Experiment
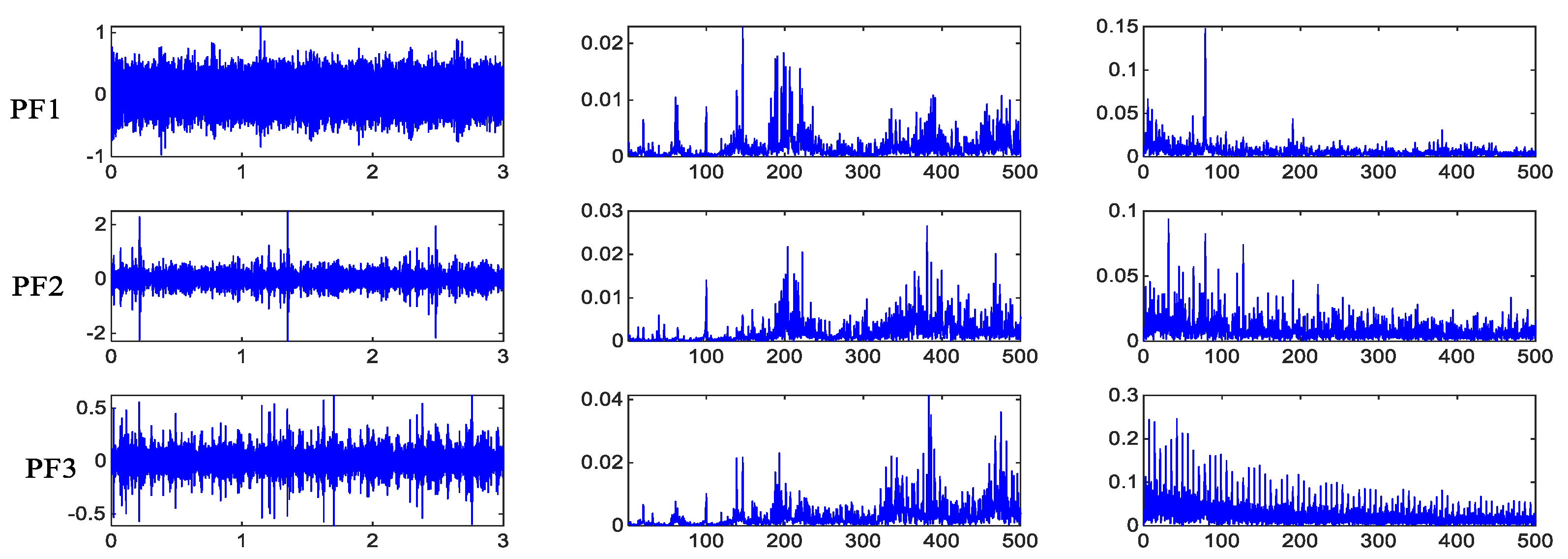
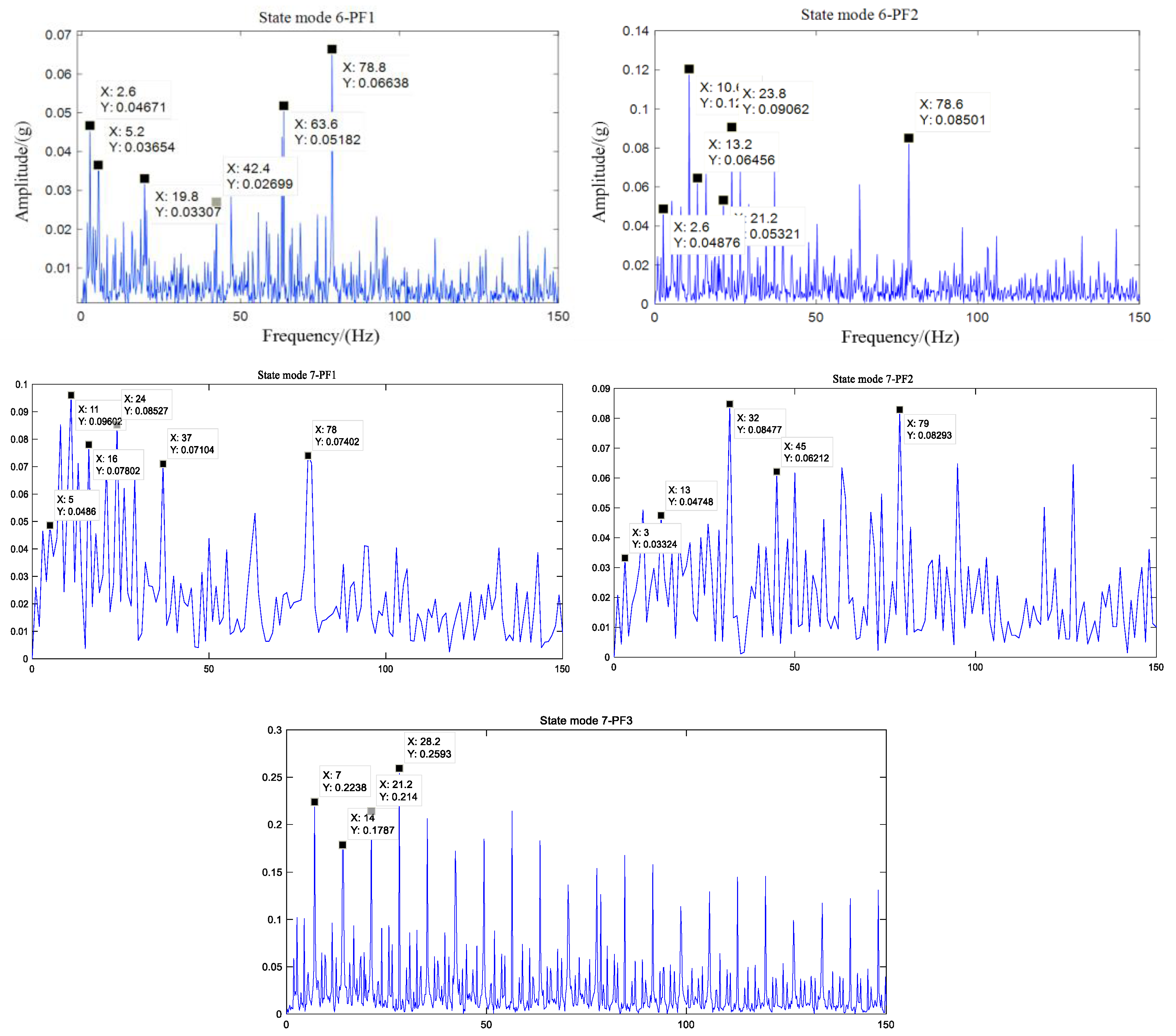
3.3.2. Data Set 2 Experiment
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Z.R.; Wang, J.; Wang, W.Y. An intelligent diagnosis scheme based on generative adversarial learning deep neural networks and its application to planetary gearbox fault pattern recognition. Neurocomputing 2018, 310, 213–222. [Google Scholar] [CrossRef]
- Wang, Y.R.; Jin, Q.; Sun, G.D.; Sun, C.F. Planetary gearbox fault feature learning using conditional variational neural networks under noise environment. Knowl. Syst. 2019, 163, 438–449. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, W.; Hu, J.; Ma, W.S. A hybrid intelligent multi-fault detection method for rotating machinery based on RSGWPT, KPCA and Twin SVM. ISA Trans. 2017, 66, 249–261. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Liang, S.Y. Multiple Faults Detection for Rotating Machinery Based on Bicomponent Sparse Low-Rank Matrix Separation Approach. IEEE Access 2018, 6, 20212–20254. [Google Scholar] [CrossRef]
- Dhamande, L.S.; Chaudhari, M.B. Compound gear-bearing fault feature extraction using statistical features based on time-frequency method. Measurement 2018, 125, 63–77. [Google Scholar] [CrossRef]
- Li, H.; Li, M.; Li, C.; Li, F.C.; Meng, G. Multi-faults decoupling on turbo-expander using differential-based ensemble empirical mode decomposition. Mech. Syst. Signal Process. 2017, 93, 267–280. [Google Scholar] [CrossRef]
- Ou, L.; Yu, D. Compound fault diagnosis of gearboxes based on GFT component extraction. Meas. Sci. Technol. 2016, 27, 1–16. [Google Scholar] [CrossRef]
- Yi, Z.; Pan, N.; Guo, Y. Mechanical compound faults extraction based on improved frequency domain blind deconvolution algorithm. Mech. Syst. Signal Process. 2017, 26, 180–188. [Google Scholar] [CrossRef]
- Yan, X.; Jia, M.; Xiang, L. Compound fault diagnosis of rotating machinery based on OVMD and a 1.5-dimension envelope spectrum. Meas. Sci. Technol. 2016, 27, 1–17. [Google Scholar] [CrossRef]
- Qin, Y.; Mao, Y.; Tang, B.; Wang, Y.; Chen, H. M-band flexible wavelet transform and its application into planetary gear transmission fault diagnosis. Mech. Syst. Signal Process. 2019, 134, 106–298. [Google Scholar] [CrossRef]
- Yu, D.; Wang, M.; Cheng, X. A method for the compound fault diagnosis of gearboxes based on morphological component analysis. Measurement 2016, 91, 519–531. [Google Scholar] [CrossRef]
- Wang, T.; Chu, F.; Han, Q.; Kong, Y. Compound faults detection in gearbox via meshing resonance and spectral kurtosis methods. J. Sound Vib. 2016, 392, 367–381. [Google Scholar] [CrossRef]
- Pan, J.; Zi, Y.; Chen, J.; Zhou, Z.; Wang, B. LiftingNet: A Novel Deep Learning Network with Layerwise Feature Learning from Noisy Mechanical Data for Fault Classification. IEEE Trans. Ind. Electron. 2018, 65, 4973–4982. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Wang, F.; Wang, Y. Rolling bearing fault diagnosis using adaptive deep belief network with dual-tree complex wavelet packet. ISA Trans. 2017, 69, 187–201. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, H.O.A.; Wong, M.L.D.; Nandi, A.K. Intelligent condition monitoring method for bearing faults from highly compressed measurements using sparse over-complete features. Mech. Syst. Signal Process. 2018, 99, 459–477. [Google Scholar] [CrossRef]
- Sun, J.; Yan, C.; Wen, J. Intelligent Bearing Fault Diagnosis Method Combining Compressed Data Acquisition and Deep Learning. IEEE Trans. Instrum. Meas. 2018, 67, 185–195. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, G.; Liu, C. Study on planetary gear fault diagnosis based on variational mode decomposition and deep neural networks. Measurement 2018, 130, 94–104. [Google Scholar] [CrossRef]
- Qin, Y.; Wang, X.; Zou, J. The optimized deep belief networks with improved logistic Sigmoid units and their application in fault diagnosis for planetary gearboxes of wind turbines. IEEE Trans. Ind. Electron. 2019, 66, 3814–3824. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Cheng, J.S.; Yu, Y. An architecture of deep learning network based on ensemble empirical mode decomposition in precise identification of bearing vibration signal. J. Mech. Sci. Technol. 2019, 33, 41–50. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, J.; Zhang, X. A novel hybrid compound fault pattern identification method for gearbox based on NIC, MFDFA and WOASVM. J. Mech. Sci. Technol. 2019, 33, 1097–1113. [Google Scholar] [CrossRef]
- Liu, X.; Tian, Y.; Lei, X.; Liu, M.; Wen, X.; Huang, H.; Wang, H. Deep forest based intelligent fault diagnosis of hydraulic turbine. J. Mech. Sci. Technol. 2019, 33, 2049–2058. [Google Scholar] [CrossRef]
- Wang, X.; Qin, Y.; Wang, Y. ReLTanh: An activation function with vanishing gradient resistance for SAE-based DNNs and its application to rotating machinery fault diagnosis. Neurocomputing 2019, 363, 88–98. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, H.; Duan, W.J.; Liang, T.C.; Wu, S.P. Rolling bearing fault feature learning using improved convolutional deep belief network with compressed sensing. Mech. Syst. Signal Process. 2018, 100, 743–765. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Wang, S.H.; Xiang, J.; Zhong, Y.; Zhou, Y. Convolutional neural network-based hidden Markov models for rolling element bearing fault identification. Knowl. Based Syst. 2018, 144, 65–76. [Google Scholar] [CrossRef]
- Wu, H.; Gu, X. Towards dropout training for convolutional neural networks. Neural Netw. Off. J. Int. Neural Netw. Soc. 2015, 71, 1–10. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.G.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72–73, 303–315. [Google Scholar]
- Van Der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Sanz, J.; Perera, R.; Huerta, C. Gear dynamics monitoring using discrete wavelet transformation and multi-layer perceptron neural networks. Appl. Soft Comput. J. 2012, 12, 2867–2878. [Google Scholar] [CrossRef]
- Sun, W.J.; Shao, S.Y.; Yan, R.Q. Induction Motor fault diagnostics based on deep neural network of sparse auto-encoder. J. Mech. Eng. 2016, 52, 65–71. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gearbox | Parameter |
|---|---|
| Helical gearbox first stage | Small gear teeth 40, large gear teeth 50 |
| Helical gearbox second stage | Small gear teeth 50, large gear teeth 60 |
| Planetary gearbox | Ring gear teeth 72; Planetary wheel teeth 27; Sun gear teeth 18 |
| Serial Number | State Mode | Number of Data | Number of Training | Number of Testing | Operating Conditions |
|---|---|---|---|---|---|
| Mode 1 | normal status | 1672 | 1322 | 350 | 209 |
| Mode 2 | SC status | 1672 | 1322 | 350 | 209 |
| Mode 3 | SW status | 1672 | 1322 | 350 | 209 |
| Mode 4 | PC status | 1672 | 1322 | 350 | 209 |
| Mode 5 | PW status | 1672 | 1322 | 350 | 209 |
| Mode 6 | PC-SW status | 1672 | 1322 | 350 | 209 |
| Mode 7 | PW-PC-SC status | 1672 | 1322 | 350 | 209 |
| State Mode | Samples | Testing Set | Operating Conditions |
|---|---|---|---|
| normal status | 350 | 350 | 209 |
| Mode 6_PF1 | 350 | 350 | 209 |
| Mode 6_PF2 | 350 | 350 | 209 |
| Mode 7_PF1 | 350 | 350 | 209 |
| Mode 7_PF2 | 350 | 350 | 209 |
| Mode 7_PF3 | 350 | 350 | 209 |
| I-CNN Layer | Parameters |
|---|---|
| Convolution 1 | Kernel size: 5; Number of convolution kernels 12; Step size: 2 |
| Pooling 1 | Pooling area: 4; Step size: 2 |
| Convolution2 | Kernel size: 5; Number of convolution kernels: 6; Step size: 2 |
| Pooling2 | Pooling area: 2; Step size: 2 |
| Convolution3 | Kernel size: 3; Number of convolution kernels: 12; Step size: 2 |
| Pooling3 | Pooling area: 2; Step size: 2 |
| Other parameters | Maximum iterations: 100; learning rate: 1; Batch size: 128 |
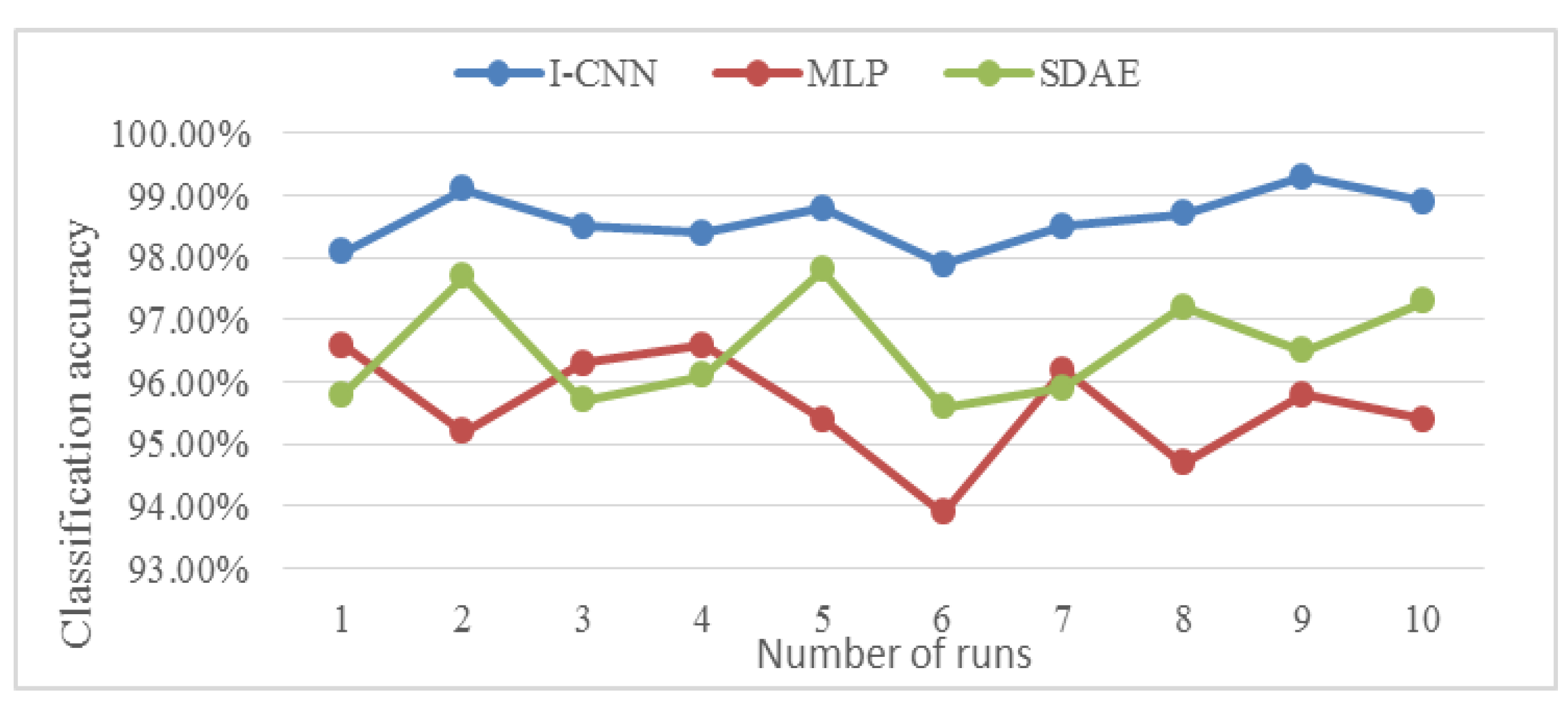
| Method | I-CNN | CNN | MLP | SDAE |
|---|---|---|---|---|
| Diagnostic accuracy (%) | 97.1 | 88 | 94.6 | 95.8 |
| Time (seconds/s) | 39.49 | 41.41 | 38.36 | 123.74 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, G.-d.; Wang, Y.-r.; Sun, C.-f.; Jin, Q. Intelligent Detection of a Planetary Gearbox Composite Fault Based on Adaptive Separation and Deep Learning. Sensors 2019, 19, 5222. https://doi.org/10.3390/s19235222
Sun G-d, Wang Y-r, Sun C-f, Jin Q. Intelligent Detection of a Planetary Gearbox Composite Fault Based on Adaptive Separation and Deep Learning. Sensors. 2019; 19(23):5222. https://doi.org/10.3390/s19235222
Chicago/Turabian StyleSun, Guo-dong, You-ren Wang, Can-fei Sun, and Qi Jin. 2019. "Intelligent Detection of a Planetary Gearbox Composite Fault Based on Adaptive Separation and Deep Learning" Sensors 19, no. 23: 5222. https://doi.org/10.3390/s19235222
APA StyleSun, G.-d., Wang, Y.-r., Sun, C.-f., & Jin, Q. (2019). Intelligent Detection of a Planetary Gearbox Composite Fault Based on Adaptive Separation and Deep Learning. Sensors, 19(23), 5222. https://doi.org/10.3390/s19235222