Optical Fiber Sensing Cables for Brillouin-Based Distributed Measurements


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Distributed Brillouin Sensing
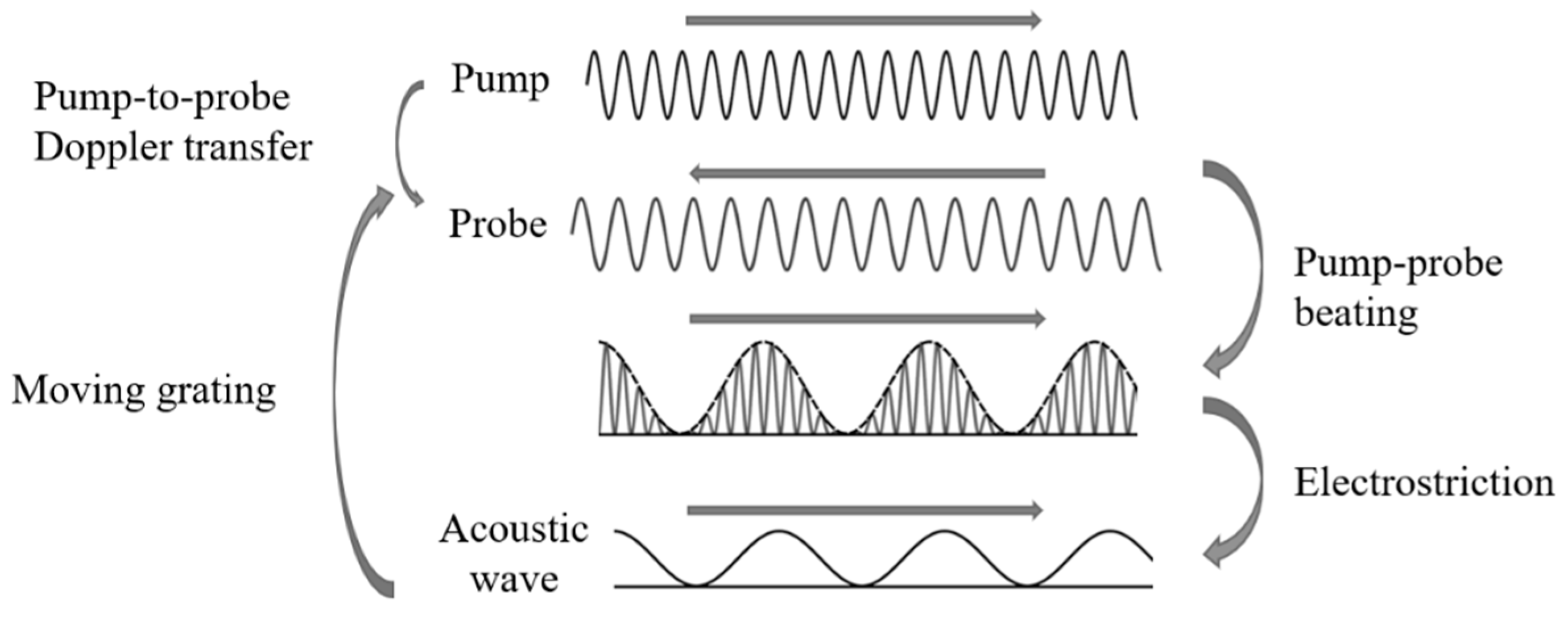
2.1. Stimulated Brillouin Scattering (SBS) and Brillouin Sensing in Silica Optical Fiber
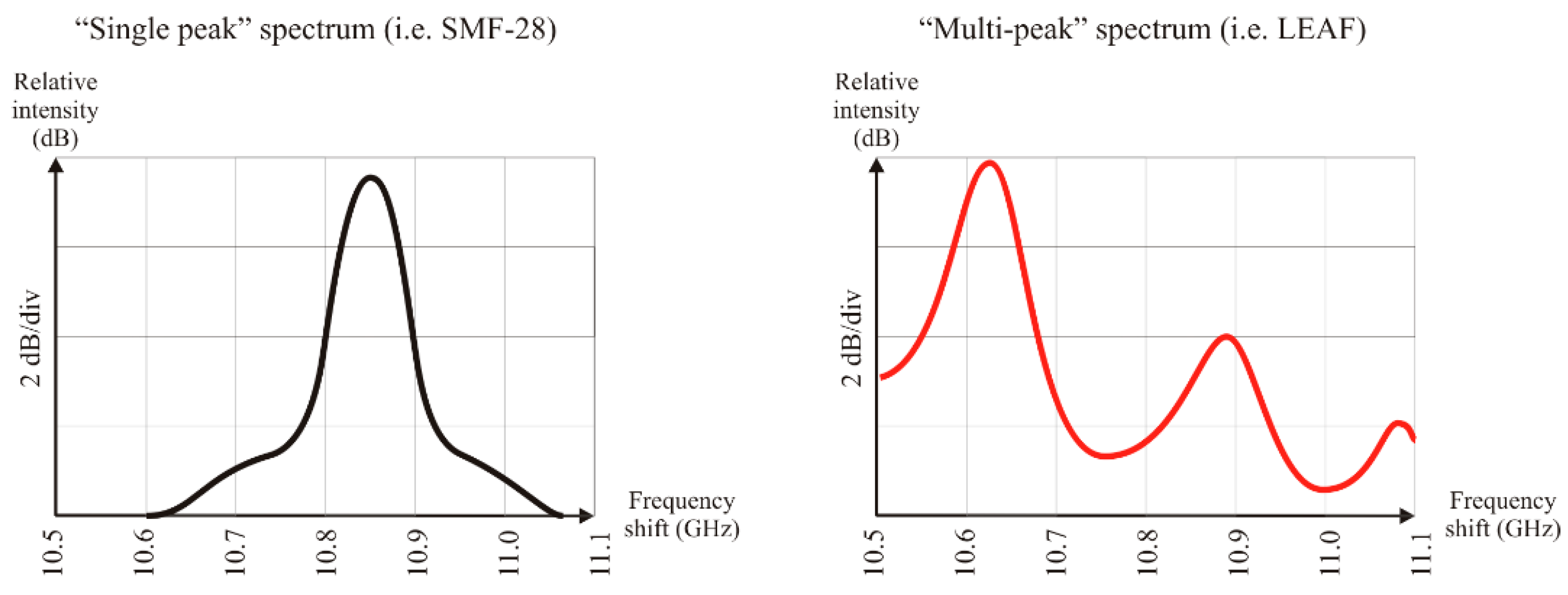
2.2. Brillouin Gain Spectrum and Brillouin Frequency Shift in Different Types of Optical Fibers
2.3. Sensitivity of the Brillouin Frequency Shift to Temperature, Strain, Pressure, and Humidity
3. Temperature Sensing
3.1. Loose-Fiber Mechanical Coupling
3.2. Over-Length
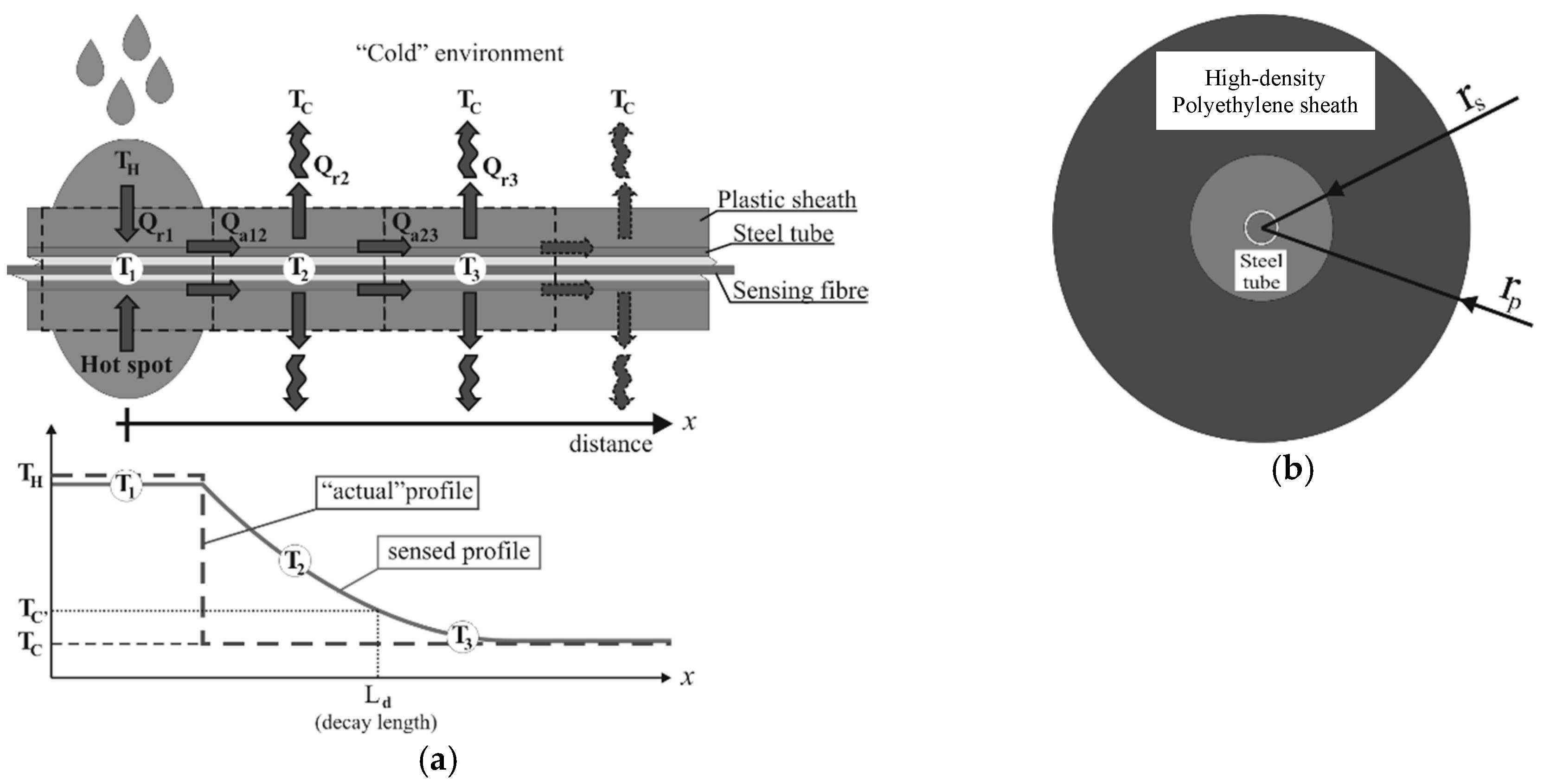
3.3. Thermal Conductivity of the Cable and Distance Resolution Limit
3.4. Use of Standard Telecom Fibers for Temperature Sensing
- the temperature range of the application falls within the operating temperature range of the used cable;
- the cable is installed in a way that ensures that no strain is applied on the cable;
- the possible fiber length location error due to the unknown over-length is tolerable for the application.
4. Strain Sensing
4.1. Installation on Different Substrates
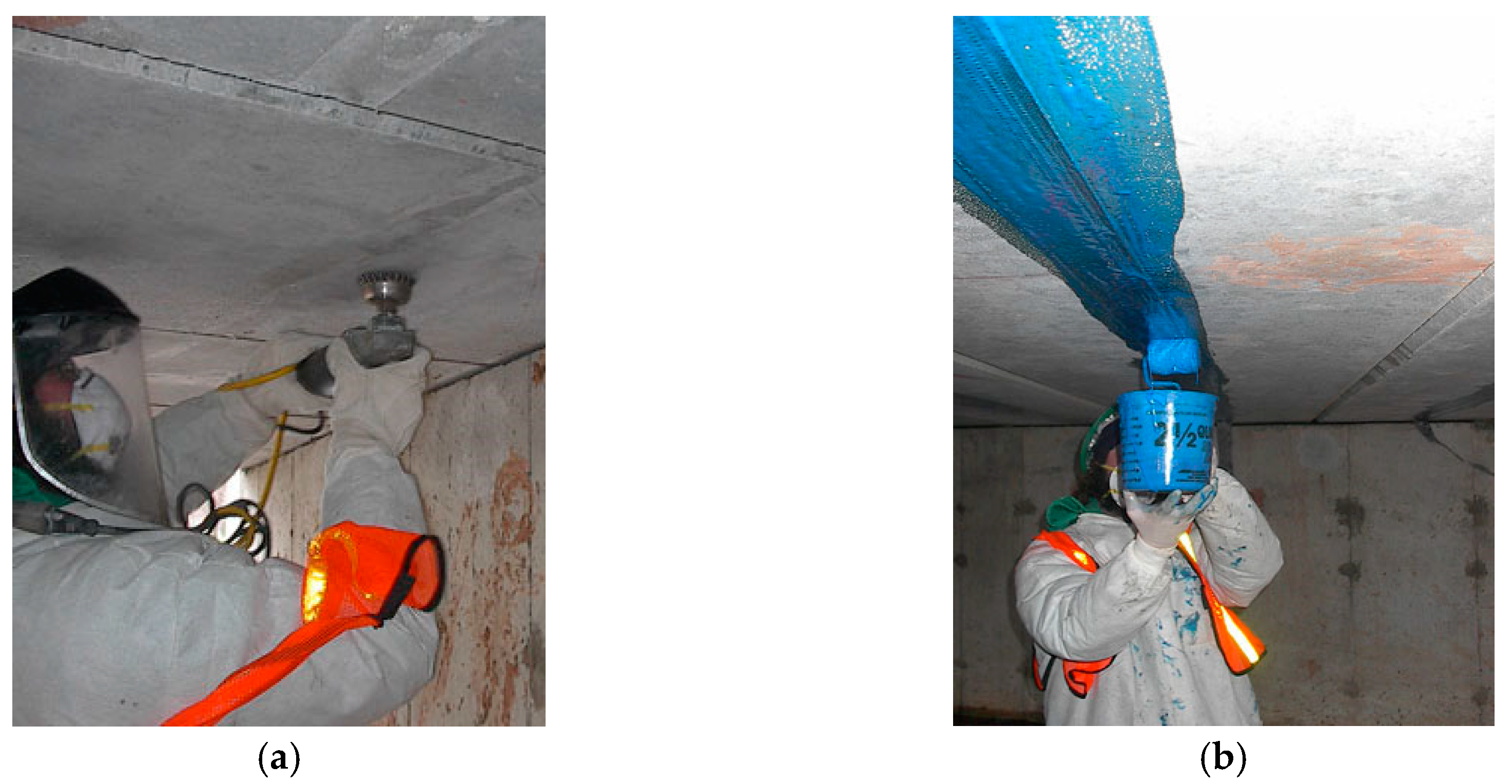
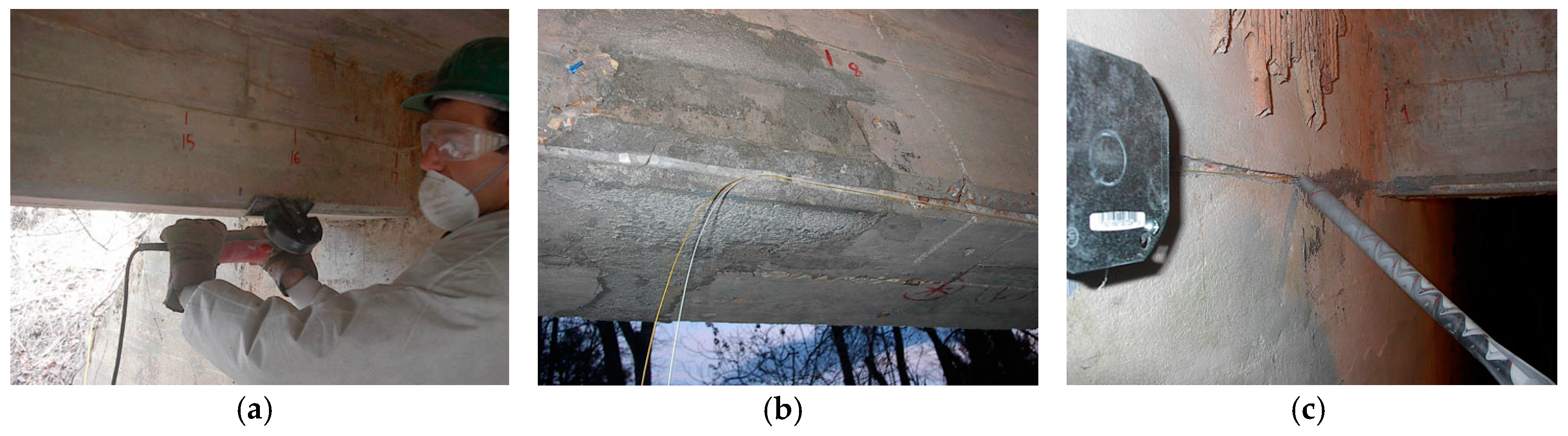
4.1.1. Surface Installation
4.1.2. Embedding in Concrete
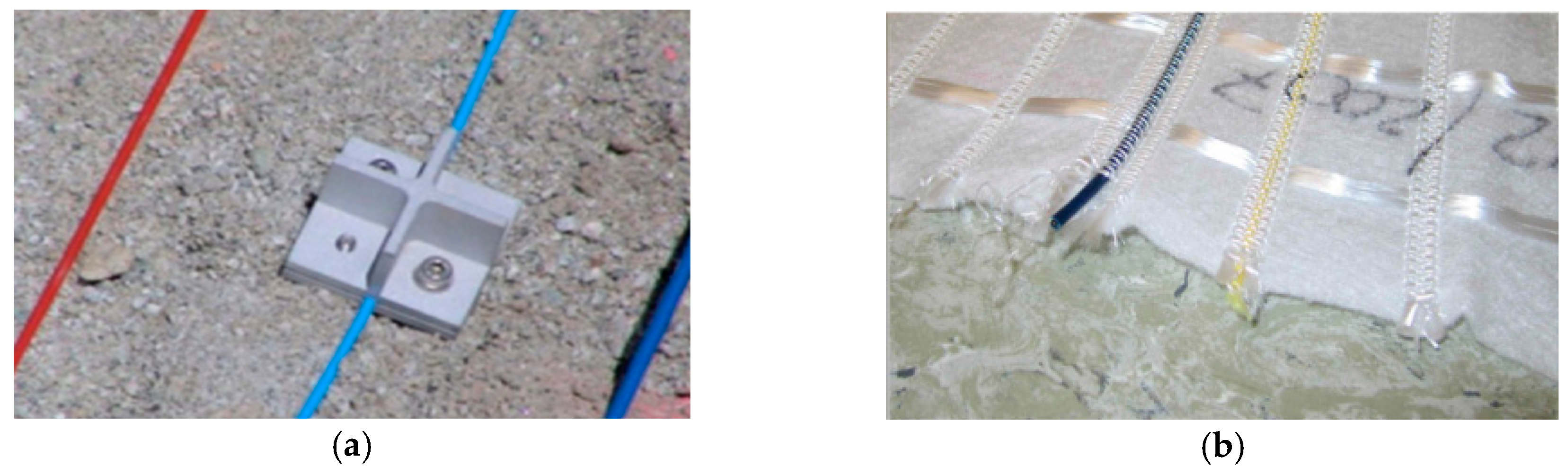
4.1.3. Embedding in Soil
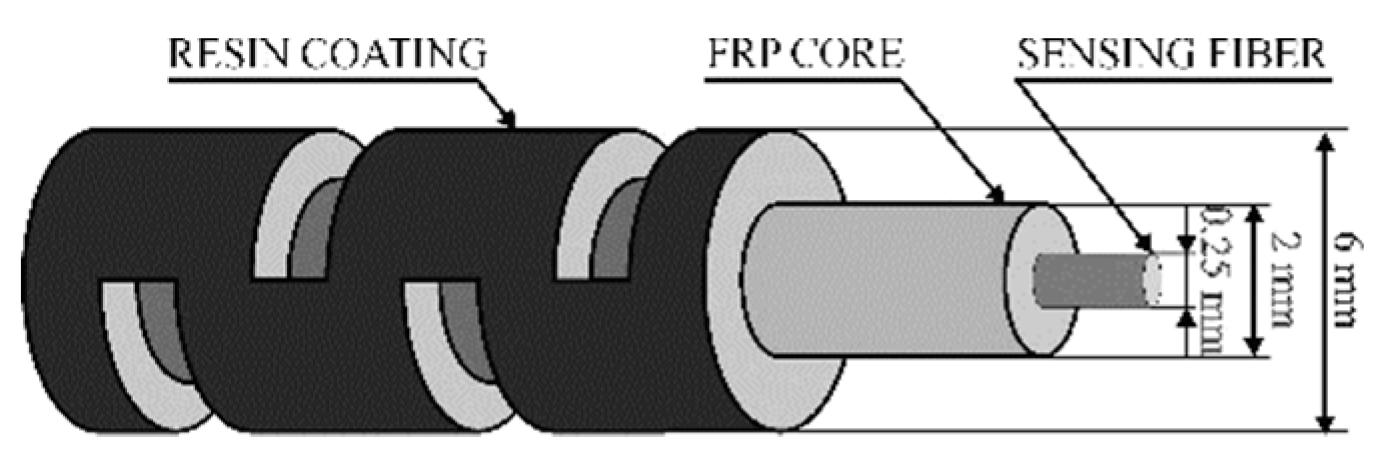
4.1.4. Embedding in Composites
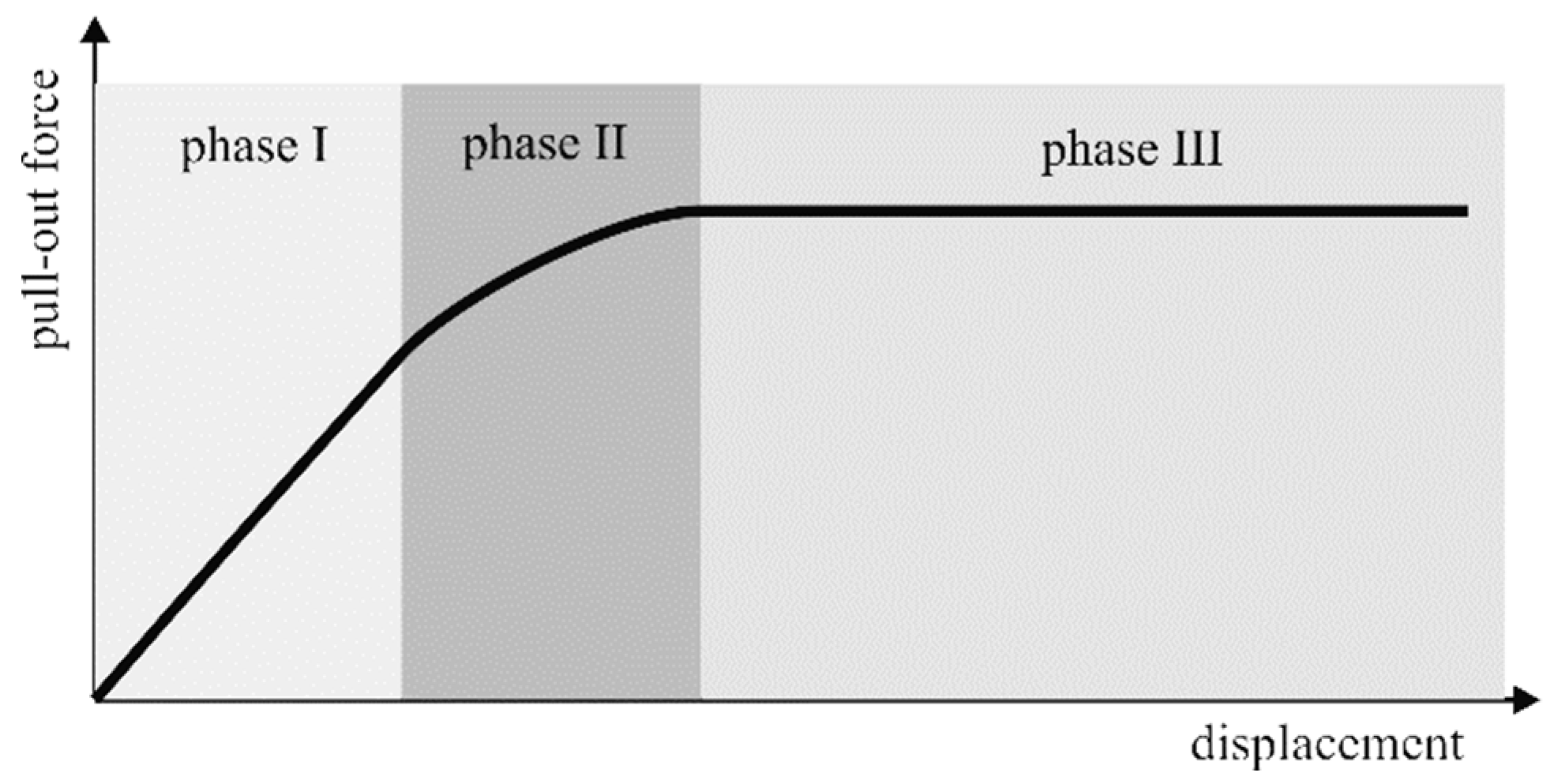
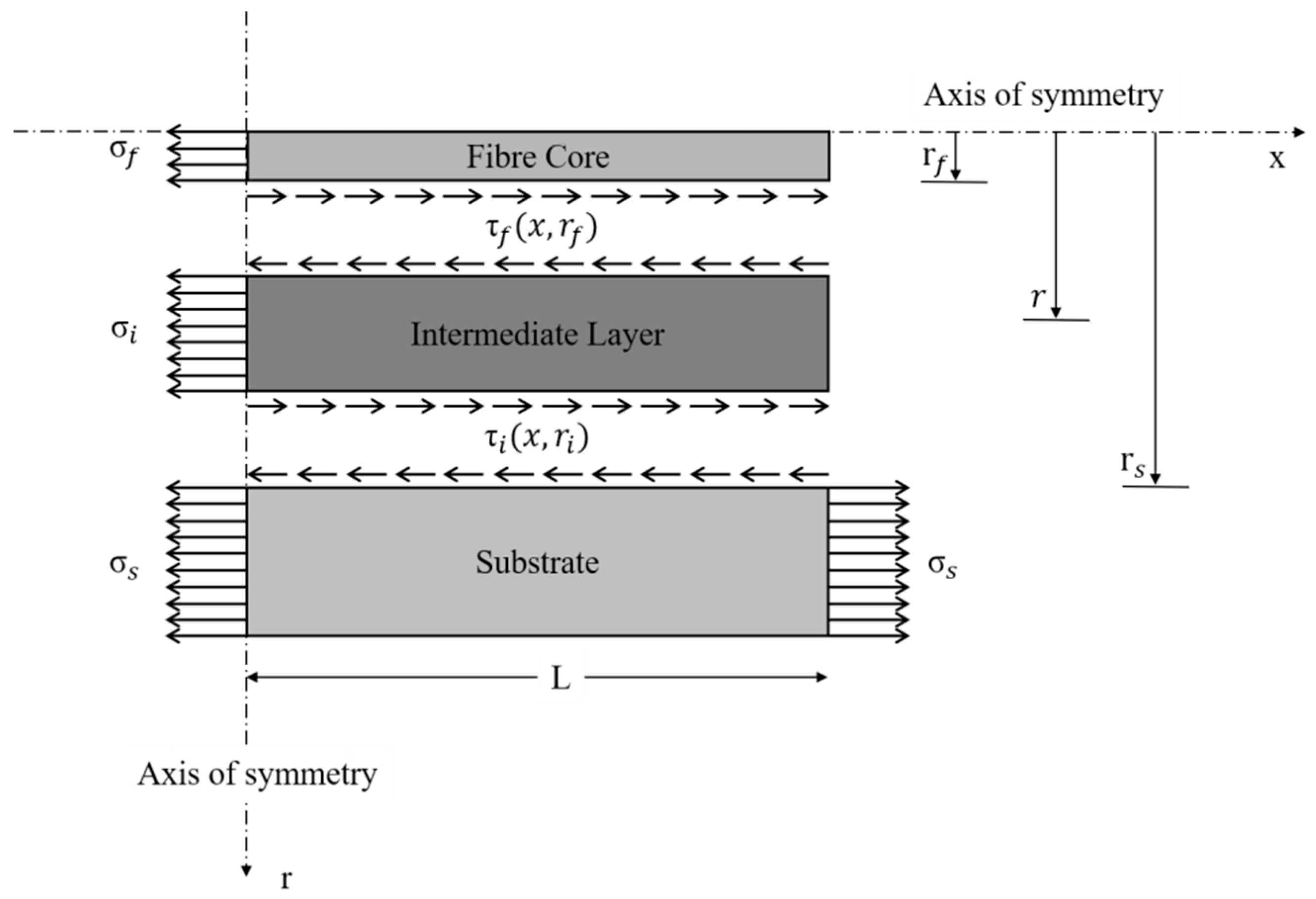
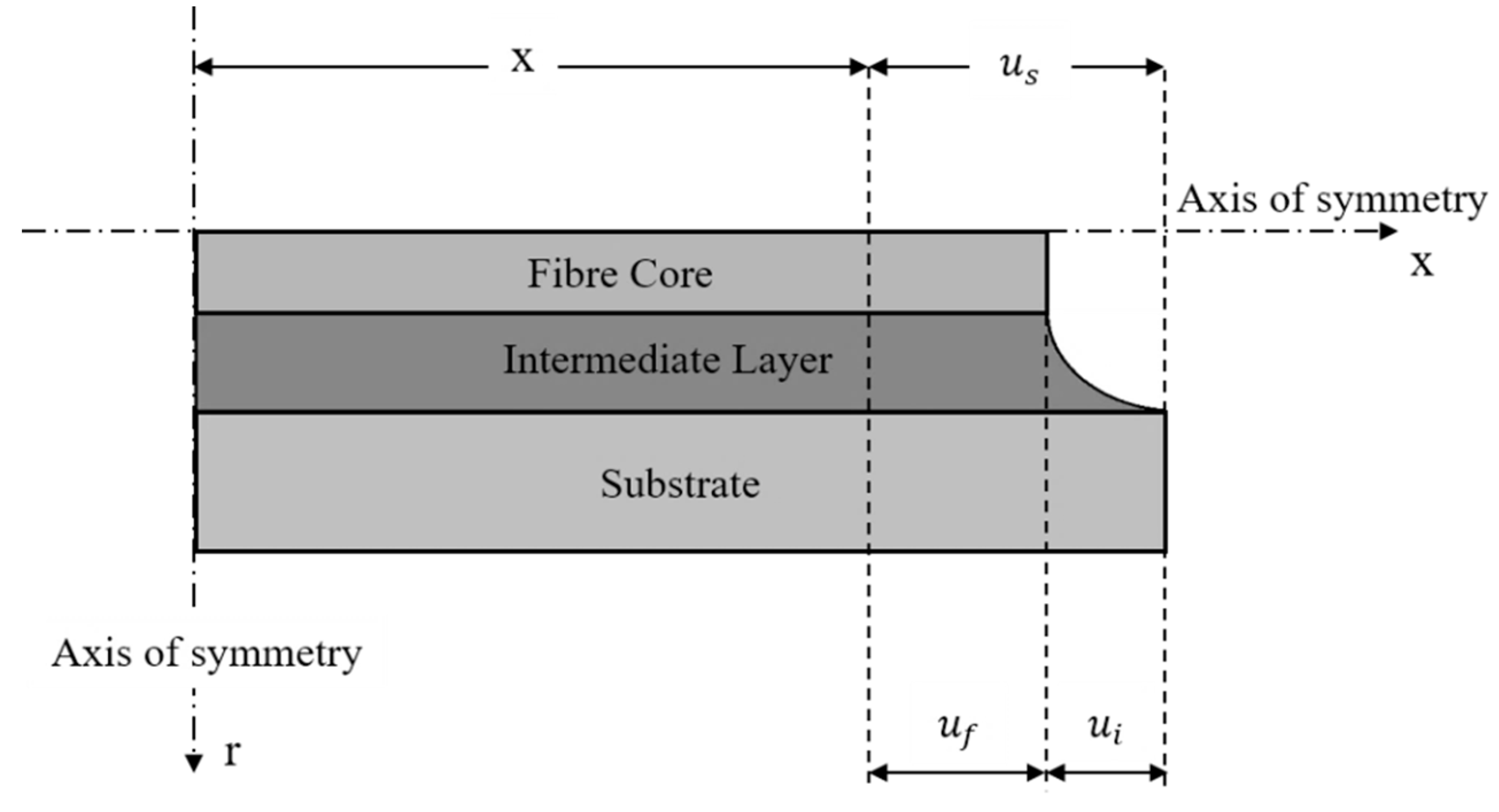
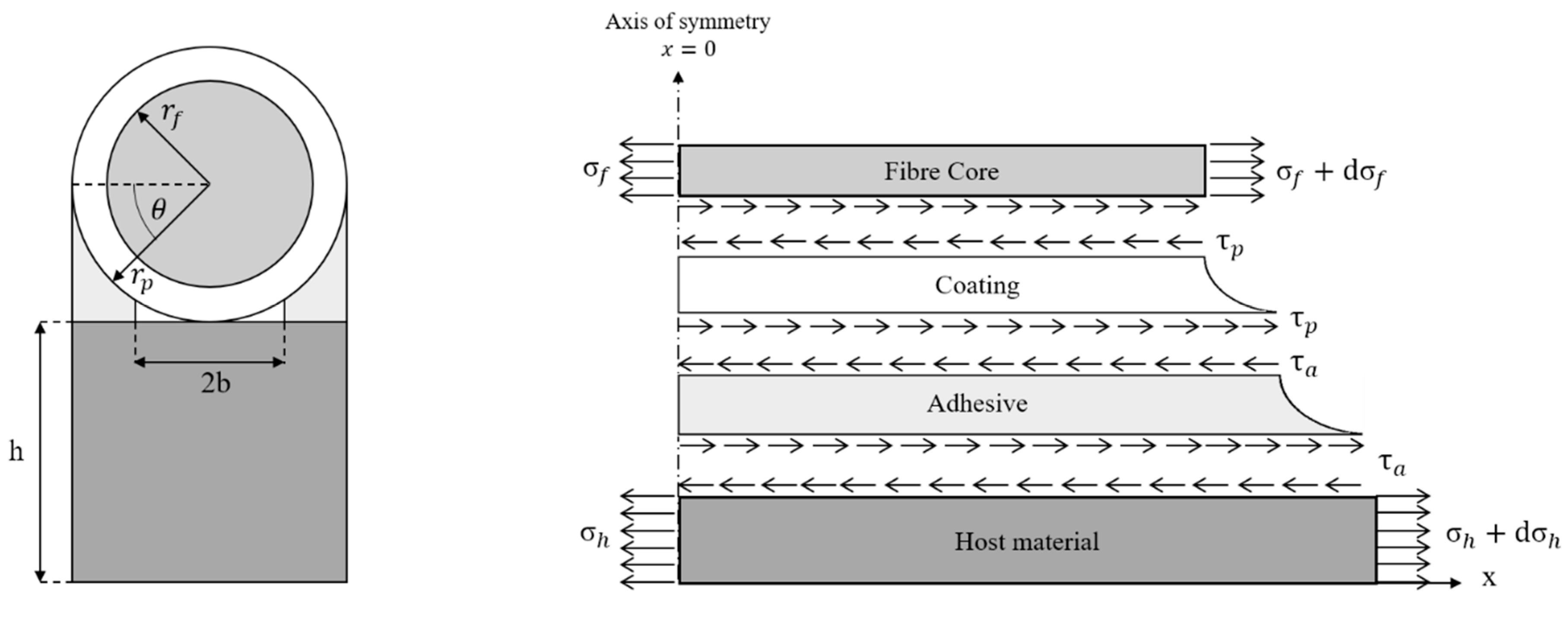
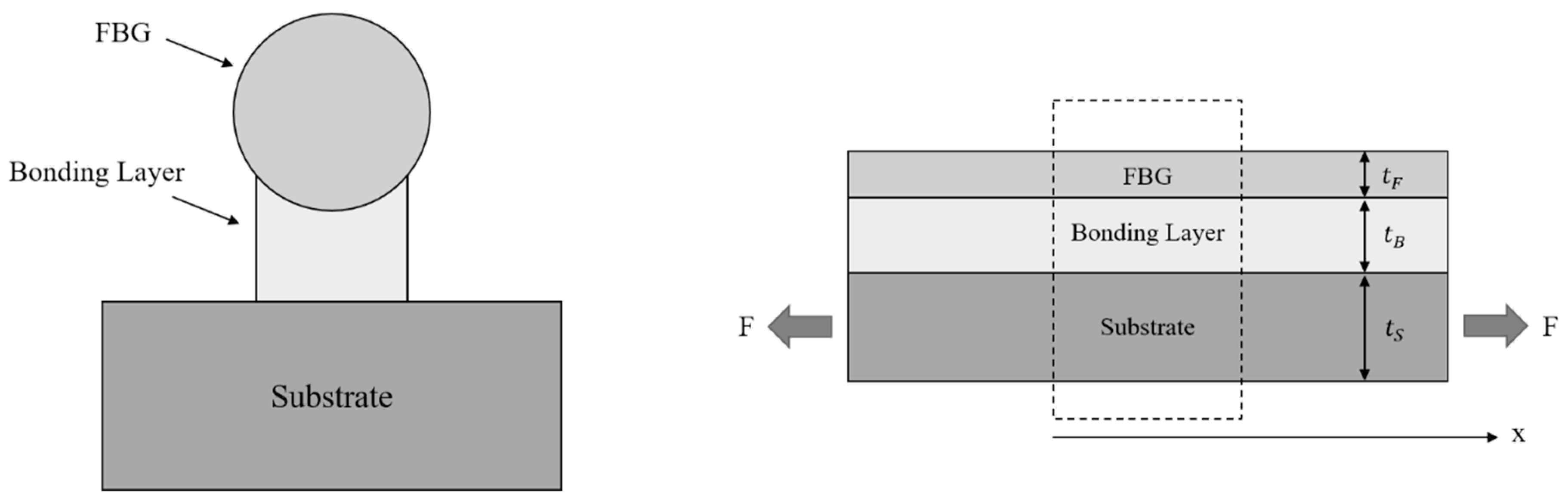
4.2. Strain Transfer
- A1.
- All the materials are considered to operate within the elastic range.
- A2.
- The interface between each pair of layers can be considered ideal, meaning that local flaws can be ignored and no debonding can occur.
- A3.
- It is assumed that the core and cladding of the optical fiber are characterized by the same mechanical properties, behaving as a single layer of material referred to as the fiber core.
4.3. Crack Detection Capability
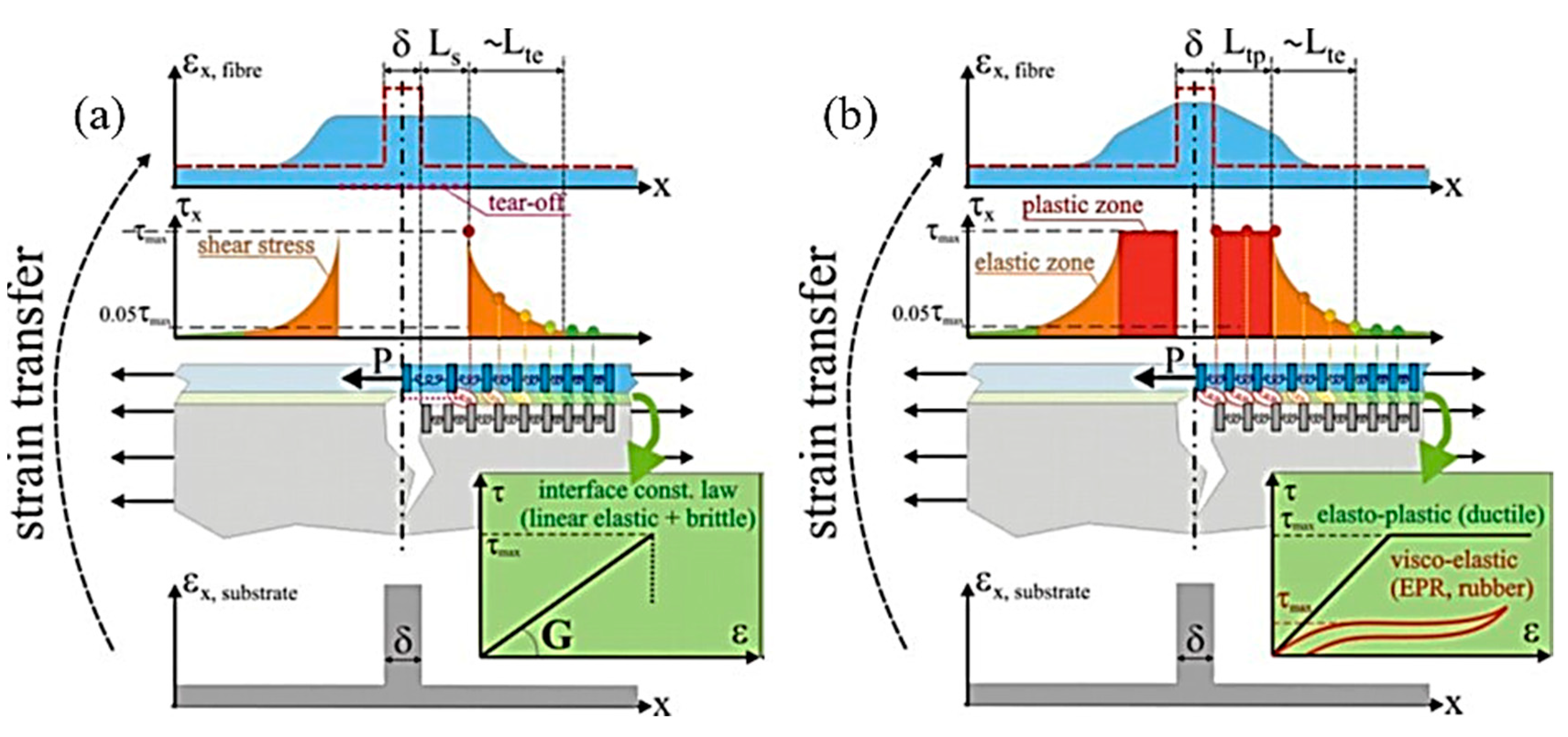
4.4. Nonlinear Stress Transfer and Overstrain Protection
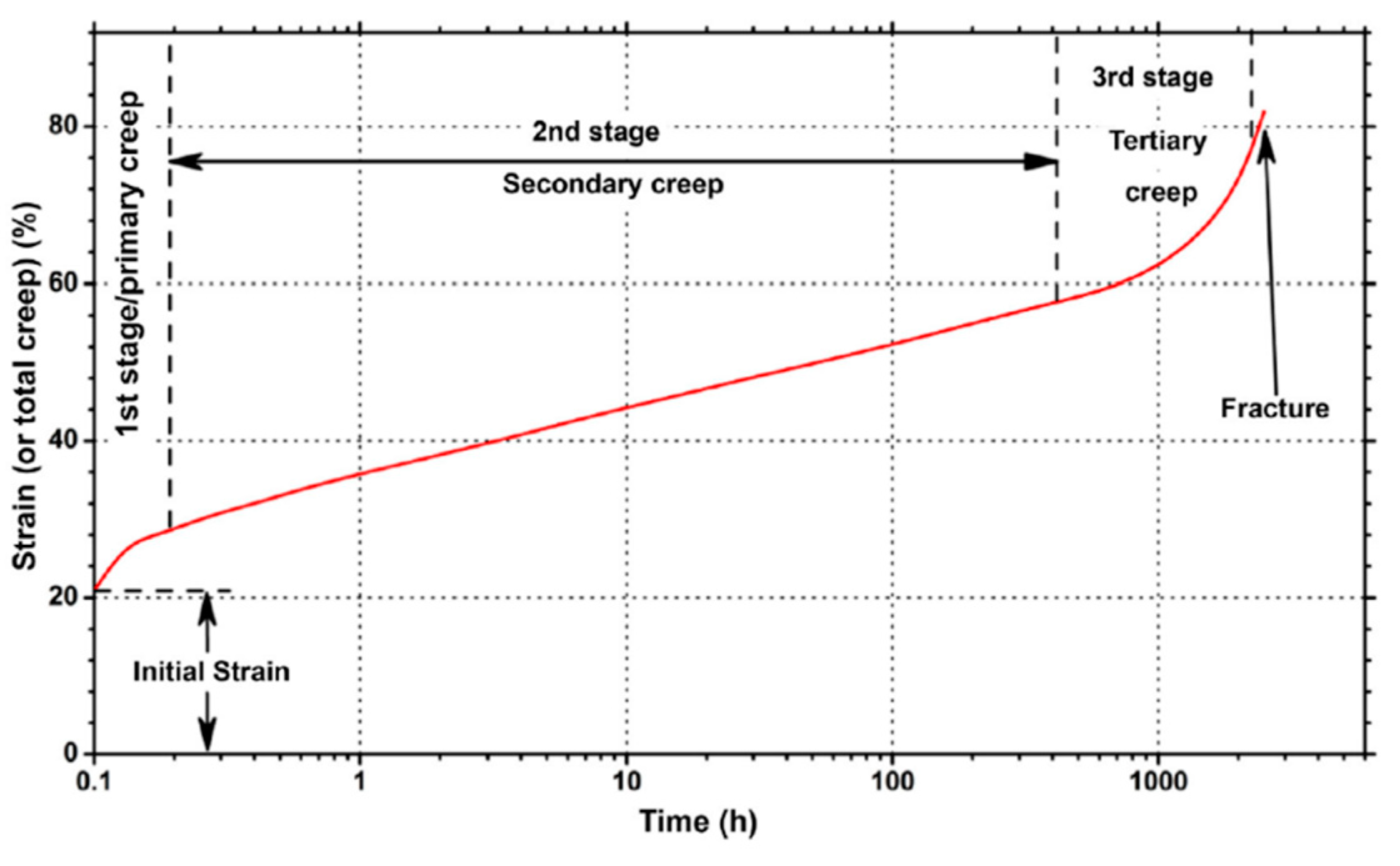
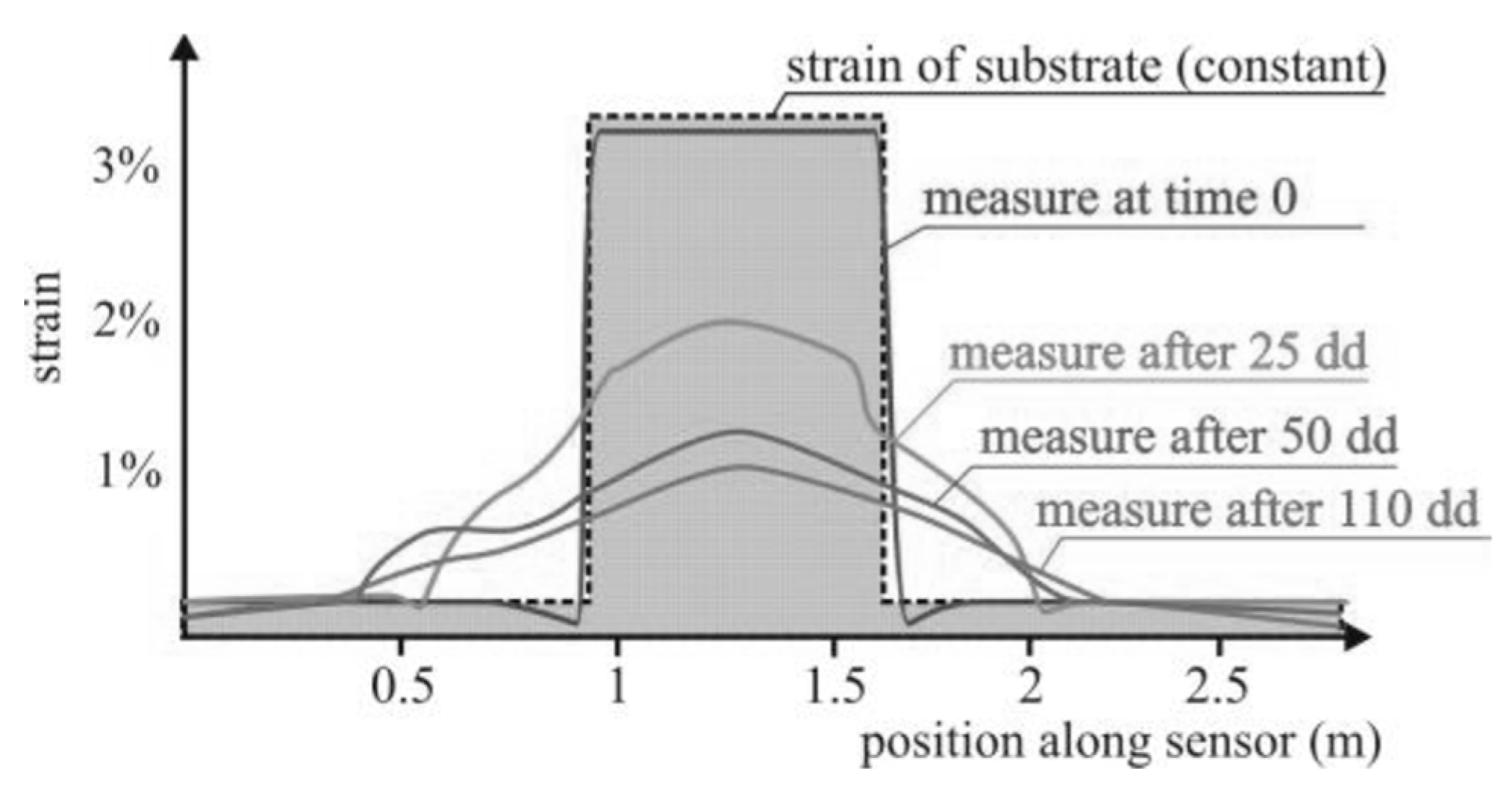
4.5. The Effect of Creep
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Hartog, A.H. An Introduction to Distributed Optical Fibre Sensors; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Bao, X.; Chen, L. Recent progress in distributed fiber optic sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed]
- Primerov, N.; Thévenaz, L. Generation and Application of Dynamic Gratings in Optical Fibers Using Stimulated Brillouin Scattering. Ph.D. Thesis, EPFL, Lausanne, Switzerland, 2013. [Google Scholar]
- Agrawal, G.P. Nonlinear fiber optics. In Nonlinear Science at the Dawn of the 21st Century, 1st ed.; Christiansen, P.L., Sorensen, M.P., Scott, A.C., Eds.; Springer: Berlin, Germany, 2000; pp. 195–211. [Google Scholar] [CrossRef]
- Soto, M.A.; Taki, M.; Bolognini, G.; Di Pasquale, F. Optimization of a DPP-BOTDA sensor with 25 cm spatial resolution over 60 km standard single-mode fiber using Simplex codes and optical pre-amplification. Opt. Express 2012, 20, 6860–6869. [Google Scholar] [CrossRef] [PubMed]
- Marini, D.; Iuliano, M.; Bastianini, F.; Bolognini, G. BOTDA sensing employing a modified Brillouin fiber laser probe source. J. Light. Technol. 2018, 36, 1131–1137. [Google Scholar] [CrossRef]
- Yariv, A. Quantum Electronics, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 1989. [Google Scholar]
- Nickles, M.; Thevenaz, L.; Robert, P.A. Brillouin gain spectrum Characterization in Single Mode Optical Fibers. J. Light. Technol. 1997, 15, 1842–1851. [Google Scholar] [CrossRef]
- Ruffin, A.B.; Li, M.J.; Chen, X.; Kobyakov, A.; Annunziata, F. Brillouin gain analysis for fibers with different refractive indices. Opt. Lett. 2005, 30, 3123–3125. [Google Scholar] [CrossRef] [PubMed]
- Liu, X. Characterization of Brillouin Scattering Spectrum in LEAF Fiber. Master’s Thesis, University of Ottawa, Ottawa, ON, Canada, 2011. [Google Scholar]
- Corning White Paper WP4259, BOTDR Measurement Techniques and Brillouin Backscatter Characteristics of Corning Single-Mode Optical Fibers. Available online: https://www.corning.com/media/worldwide/coc/documents/Fiber/RC-%20White%20Papers/WP-General/WP4259_01-15.pdf (accessed on 21 October 2019).
- Horiguchi, T.; Shimizu, K.; Kurashima, T.; Tateda, M. Development of a distributed sensing technique using Brillouin scattering. J. Light. Technol. 1995, 13, 1296–1302. [Google Scholar] [CrossRef]
- Cho, S.B.; Kim, Y.G.; Heo, J.S.; Lee, J.J. Pulse width dependence of Brillouin frequency in single mode optical fibers. Opt. Express 2005, 13, 9472–9479. [Google Scholar] [CrossRef]
- Kurashima, T.; Horigushi, T.; Tateda, M. Thermal effects of Brillouin gain spectra in single-mode fibers. IEEE Photon. Technol. Lett. 1990, 2, 718–720. [Google Scholar] [CrossRef]
- Le Floch, S.; Riou, F.; Cambon, P. Experimental and theoretical study of the Brillouin linewidth and frequency at low temperature in standard single-mode optical fibres. J. Opt. A Pure Appl. Opt. 2001, 3, L12–L15. [Google Scholar] [CrossRef]
- Thévenaz, L.; Fellay, A.; Facchini, M.; Scandale, W.; Nikles, M.; Robert, P.A. Brillouin optical fiber sensor for cryogenic thermometry. Smart Structures and Materials 2002: Smart Sensor Technology and Measurement Systems. In Proceedings of the SPIE’s 9th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 27 June 2002; Volume 4694. [Google Scholar] [CrossRef]
- Zou, W.; He, Z.; Hotate, K. Investigation of Strain- and Temperature-Dependences of Brillouin Frequency Shifts in GeO2-Doped Optical Fibers. J. Light. Technol. 2008, 26, 1854–1861. [Google Scholar] [CrossRef]
- Belal, M.; Newson, T.P. Experimental examination of the variation of the spontaneous Brillouin power and frequency shift under the combined influence of temperature and strain. In Proceedings of the 21st International Conference on Optical Fibre Sensors (OFS21), Ottawa, ON, Canada, 17 May 2011; Volume 7753. [Google Scholar]
- Bolognini, G.; Hartog, A. Raman-based fibre sensors: Trends and applications. Opt. Fiber Technol. 2013, 19, 678–688. [Google Scholar] [CrossRef]
- Soto, M.A.; Sahu, P.K.; Faralli, S.; Sacchi, G.; Bolognini, G.; Di Pasquale, F.; Nebendahl, B.; Rueck, C. High performance and highly reliable Raman-based distributed temperature sensors based on correlation-coded OTDR and multimode graded-index fibers. In Proceedings of the Third European Workshop on Optical Fibre Sensors, Napoli, Italy, 2 July 2007; Volume 6619. [Google Scholar] [CrossRef]
- Bolognini, G.; Soto, M.A. Optical pulse coding in hybrid distributed sensing based on Raman and Brillouin scattering employing Fabry-Perot lasers. Opt. Express 2010, 18, 8459–8465. [Google Scholar] [CrossRef] [PubMed]
- Zou, W.; He, Z.; Hotate, K. Complete discrimination of strain and temperature using Brillouin frequency shift and birefringence in a polarization-maintaining fiber. Opt. Express 2009, 17, 1248–1255. [Google Scholar] [CrossRef] [PubMed]
- Zhou, D.P.; Li, W.; Chen, L.; Bao, X. Distributed Temperature and Strain Discrimination with Stimulated Brillouin Scattering and Rayleigh Backscatter in an Optical Fiber. Sensors 2013, 13, 1836–1845. [Google Scholar] [CrossRef]
- Kurashima, T.; Horiguchi, T.; Tateda, M. Thermal effects on the Brillouin frequency shift in jacketed optical silica fibers. Appl. Opt. 1990, 29, 2219–2222. [Google Scholar] [CrossRef]
- Lanticq, V.; Quiertant, M.; Merliot, E.; Delephine-Lesoille, S. Brillouin sensing cable: Design and experimental validation. IEEE Sen. J. 2008, 8, 1194–1201. [Google Scholar] [CrossRef]
- Zeeshan, A.; Filla, J.; Guthrie, W.; Quintavalle, J. Fiber Bragg Grating Based Thermometry. NCSL Int. Meas. 2015, 10, 24–27. [Google Scholar] [CrossRef]
- Le Floch, S. Etude de la Diffusion Brillouin Stimulée Dans les Fibres Optiques Monomodes Standard. Application aux Capteurs de Température et de Pression. Ph.D. Thesis, Université de Bretagne Occidentale, Brest, France, 2001. [Google Scholar]
- Le Floch, S.; Cambon, P. Study of Brillouin gain spectrum in standard single-mode optical fiber at low temperatures (1.4–370 K) and high hydrostatic pressures (1–250 bars). Opt. Commun. 2003, 219, 395–410. [Google Scholar] [CrossRef]
- Gu, H.; Dong, H.; Zhang, G.; Dong, Y.; He, J. Dependence of Brillouin frequency shift on radial and axial strain in silica optical fibers. Appl. Opt. 2012, 51, 7864–7868. [Google Scholar] [CrossRef]
- Zhang, G.; Gu, H.; Dong, H.; Li, L.; He, J. Pressure Sensitization of Brillouin Frequency Shift in Optical Fibers with Double-Layer Polymer Coatings. IEEE Sens. J. 2013, 13, 2437–2441. [Google Scholar] [CrossRef]
- Galindez, C.A.; Madruga, F.J.; Lomer, M.; Cobo, A.; Lopez-Higuera, J.M. Effect of humidity on optical fiber distributed sensor based on Brillouin scattering. In Proceedings of the 19th International Conference on Optical Fibre Sensors, Perth, Australia, 16 May 2008; Volume 7004. [Google Scholar] [CrossRef]
- Kagan, M. On equivalent resistance of electrical circuits. Am. J. Phys. 2015, 83, 53–63. [Google Scholar] [CrossRef]
- Genda, C.; Xu, B.; McDaniel, R.D.; Ying, X.; Pommerenke, D.J.; Wu, Z. Distributed Strain Measurement of a Large-Scale Reinforced Concrete Beam-Column Assembly under Cyclic Loading. Smart Structures and Materials 2005: Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 17 May 2005; Volume 5765. [Google Scholar] [CrossRef]
- Klug, F.; Lackner, S.; Lienhart, W. Monitoring of Railway Deformations using Distributed Fiber Optic Sensors. In Proceedings of the Joint International Symposium on Deformation Monitoring (JISDM), Wien, Austria, 1 April 2016. [Google Scholar]
- Bao, Y.; Hoehler, M.S.; Smith, C.M.; Bundy, M.; Chen, G. Temperature Measurement and Damage Detection in Concrete Beams Exposed to Fire Using PPP-BOTDA Based Fiber Optic Sensors. Smart Mater. Struct. 2017, 26, 105034. [Google Scholar] [CrossRef] [PubMed]
- Barrias, A.; Casas, J.R.; Villalba, S. Embedded Distributed Optical Fiber Sensors in Reinforced Concrete Structures—A Case Study. Sensors 2018, 18, 980. [Google Scholar] [CrossRef]
- Bassil, A.; Wang, X.; Chapeleau, X.; Niederleithinger, E.; Abraham, O.; Leduc, D. Distributed Fiber Optics Sensing and Coda Wave Interferometry Techniques for Damage Monitoring in Concrete Structures. Sensors 2019, 19, 356. [Google Scholar] [CrossRef] [PubMed]
- Bastianini, F.; Rizzo, A.; Galati, N.; Deza, U.; Nanni, A. Discontinuous Brillouin strain monitoring of small concrete bridges: Comparison between near-to-surface and “smart” FRP fiber installation techniques. Smart Structures and Materials 2005: Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 17 May 2005; Volume 5765. [Google Scholar] [CrossRef]
- Bersan, S.; Schenato, L.; Rajendran, A.; Palmieri, L.; Cola, S.; Pasuto, A.; Simonini, P. Application of a high resolution distributed temperature sensor in a physical model reproducing subsurface water flow. Measurement 2017, 98, 321–324. [Google Scholar] [CrossRef]
- Schenato, L.; Palmieri, L.; Camporese, M.; Bersan, S.; Cola, S.; Pasuto, A.; Galtarossa, A.; Salandin, P.; Simonini, P. Distributed optical fibre sensing for early detection of shallow landslides triggering. Sci. Rep. 2017, 7, 14686. [Google Scholar] [CrossRef]
- Bersan, S.; Bergamo, O.; Palmieri, L.; Schenato, L.; Simonini, P. Distributed strain measurements in a CFA pile using high spatial resolution fibre optic sensors. Eng. Struct. 2018, 160, 554–565. [Google Scholar] [CrossRef]
- Cola, S.; Schenato, L.; Brezzi, L.; Tchamaleu Pangop, F.C.; Palmieri, L.; Bisson, A. Composite anchors for slope stabilisation: Monitoring of their in-situ behaviour with optical fibre. Geosciences 2019, 9, 240. [Google Scholar] [CrossRef]
- Iten, M.; Puzrin, A.M.; Schmid, A. Landslide monitoring using a road-embedded optical fiber sensor. Smart Sensor Phenomena, Technology, Networks, and Systems 2008. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 7 April 2008; Volume 6933. [Google Scholar] [CrossRef]
- Zeni, L.; Picarelli, L.; Avolio, B.; Coscetta, A.; Papa, R.; Zeni, G.; Di Maio, C.; Vassallo, R.; Minardo, A. Brillouin optical time-domain analysis for geotechnical monitoring. J. Rock Mech. Geotech. Eng. 2015, 7, 458–462. [Google Scholar] [CrossRef]
- Zhu, H.H.; Shi, B.; Zhang, J.; Yan, J.F.; Zhang, C.C. Distributed fiber optic monitoring and stability analysis of a model slope under surcharge loading. J. Mt. Sci. 2014, 11, 979–989. [Google Scholar] [CrossRef]
- Wang, B.J.; Li, K.; Shi, B.; Wei, G.Q. Test on application of distributed fiber optic sensing technique into soil slope monitoring. Landslides 2009, 6, 61–68. [Google Scholar] [CrossRef]
- Picarelli, L.; Damiano, E.; Greco, R.; Minardo, A.; Olivares, L.; Zeni, L. Performance of slope behavior indicators in unsaturated pyroclastic soils. J. Mt. Sci. 2015, 12, 1434–1447. [Google Scholar] [CrossRef]
- Iten, M. Novel Applications of Distributed Fiber-Optic Sensing in Geotechnical Engineering. Ph.D. Thesis, Federal Institute of Technology in Zurich, Zurich, Switzerland, 2011. [Google Scholar]
- Buchoud, E.; Vrabie, V.; Mars, J.I.; D’Urso, G.; Girard, A.; Blairon, S.; Hénault, J.M. Quantification of submillimeter displacements by distributed optical fiber sensors. IEEE Trans. Instrum. Meas. 2016, 65, 413–422. [Google Scholar] [CrossRef]
- Zhang, C.C.; Zhu, H.H.; Shi, B.; She, J.K. Interfacial characterization of soil-embedded optical fiber for ground deformation measurement. Smart Mater. Struct. 2014, 23, 095022. [Google Scholar] [CrossRef]
- Zhu, H.H.; She, J.K.; Zhang, C.C.; Shi, B. Experimental study on pullout performance of sensing optical fibers in compacted sand. Measurement 2015, 73, 284–294. [Google Scholar] [CrossRef]
- Zhang, C.C.; Zhu, H.H.; Shi, B. Role of the interface between distributed fiber optic strain sensor and soil in ground deformation measurement. Sci. Rep. 2016, 6, 36469. [Google Scholar] [CrossRef]
- Marmota Engineering AG, Zurich (CH). Available online: https://www.marmota.com/ (accessed on 21 October 2019).
- TenCate GeoDetect® Solution White Paper, Koninklijke Ten Cate Bv, (NL). Available online: https://www.scribd.com/document/189026205/GeoDetect-White-Paper-2010-Final (accessed on 21 October 2019).
- Patent Application WO2008007025A3. 2008. Available online: https://patents.google.com/patent/WO2008007025A3/it (accessed on 21 October 2019).
- Thiele, E.; Helbig, R.; Erth, H.; Krebber, K.; Nöther, N.; Wosniok, A. Dike monitoring. In Proceedings of the 14th International Symposium on Flood Defence: Managing Flood Risk, Reliability and Vulnerability, Toronto, ON, Canada, 6–8 May 2017. [Google Scholar]
- Krebber, K. Smart Technical Textiles Based on Fiber Optic Sensors. In Current Developments in Optical Fiber Technology; Harun, S.W., Arof, H., Eds.; IntechOpen: London, UK, 2013; pp. 319–344. [Google Scholar] [CrossRef]
- Patent Application EP2267204A1. 2009. Available online: https://patents.google.com/patent/EP2267204A1/de (accessed on 21 October 2019).
- Bastianini, F.; Cargnelutti, M.; Di Tommaso, A.; Toffanin, M. Distributed Brillouin Fiber Optic Strain Monitoring Applications in Advanced Composite Materials. Smart Structures and Materials 2003: Smart Systems and Nondestructive Evaluation for Civil Infrastructures. In Proceedings of the Smart Structures and Materials, San Diego, CA, USA, 18 August 2003; Volume 5057. [Google Scholar] [CrossRef]
- Di Sante, R. Fiber Optic Sensors for Structural Health Monitoring of Aircraft Composite Structures: Recent Advances and Applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef]
- Kim, S.W.; Kang, W.R.; Jeong, M.S.; Lee, I.; Kwon, I.B. Deflection estimation of a wind turbine blade using FBG sensors embedded in the blade bonding line. Smart Mater. Struct. 2013, 22, 125004. [Google Scholar] [CrossRef]
- Di Sante, R.; Donati, L. Strain monitoring with embedded Fiber Bragg Gratings in advanced composite structures for nautical applications. Measurement 2013, 46, 2118–2126. [Google Scholar] [CrossRef]
- Di Sante, R.; Bastianini, F.; Donati, L. Low-coherence interferometric measurements of optical losses in autoclave cured composite samples with embedded optical fibers. In Proceedings of the Fifth European Workshop on Optical Fibre Sensors (EWOFS), Krakow, Poland, 19–22 May 2013; Volume 8794. [Google Scholar] [CrossRef]
- Di Sante, R.; Donati, L.; Troiani, E.; Proli, P. Reliability and accuracy of embedded fiber Bragg grating sensors for strain monitoring in advanced composite structures. Met. Mater. Int. 2014, 20, 537–543. [Google Scholar] [CrossRef]
- Di Sante, R.; Donati, L.; Troiani, E.; Proli, P. Evaluation of bending strain measurements in a composite sailboat bowsprit with embedded Fiber Bragg Gratings. Measurement 2014, 54, 106–117. [Google Scholar] [CrossRef]
- Saton, K.; Fukuchi, K.; Kurosawa, Y.; Hongo, A.; Takeda, N. Polyimide-Coated Small-Diameter Optical Fiber Sensors for Embedding in Composite Laminate Structures. Smart Structures and Materials 2001: Sensory Phenomena and Measurement Instrumentation for Smart Structures and Materials. In Proceedings of the SPIE’s 8th Annual International Symposium on Smart Structures and Materials, Newport Beach, CA, USA, 4 March 2001; Volume 4328, pp. 285–294. [Google Scholar] [CrossRef]
- Shivakumar, K.; Emmanwori, L. Mechanics of failure of composite laminates with an embedded fiber optic sensor. J. Compos. Mater. 2004, 38, 669–680. [Google Scholar] [CrossRef]
- Cox, H.L. The Elasticity and Strength of Paper and other Fibrous Materials. Br. J. Appl. Phys. 1952, 3, 72–79. [Google Scholar] [CrossRef]
- Claus, R.O.; Bennett, K.D.; Vengsarkar, A.M.; Murphy, K.A. Embedded Optical Fiber Sensors for Materials Evaluation. J. Nondestruct. Eval. 1989, 8, 135–145. [Google Scholar] [CrossRef]
- Nanni, A.; Yang, C.C.; Pan, K.; Wang, J.S.; Michael, R.R. Fiber-optic sensors for concrete strain/stress measurement. ACI Mater. J. 1991, 88, 257–264. [Google Scholar]
- Pak, Y.E. Longitudinal shear transfer in fiber optic sensors. Smart Mater. Struct. 1992, 1, 57–62. [Google Scholar] [CrossRef]
- Ansari, F.; Libo, Y. Mechanics of Bond and Interface Shear Transfer in Optical Fiber Sensors. J. Eng. Mech. 1998, 124, 385–394. [Google Scholar] [CrossRef]
- Li, D.; Li, H.; Ren, L.; Song, G. Strain transferring analysis of fiber Bragg grating sensors. Opt. Eng. 2006, 45, 024402. [Google Scholar] [CrossRef]
- Duck, G.; LeBlanc, M. Arbitrary strain transfer from a host to an embedded fiber-optic sensor. Smart Mater. Struct. 2000, 9, 492–497. [Google Scholar] [CrossRef]
- Leung, C.K.Y.; Wang, X.; Olson, N. Debonding and Calibration Shift of Optical Fiber Sensors in Concrete. J. Eng. Mech. 2000, 126, 300–307. [Google Scholar] [CrossRef]
- Li, H.N.; Zhou, G.D.; Ren, L.; Li, D.S. Strain Transfer Coefficient Analyses for Embedded Fiber Bragg Grating Sensors in Different Host Materials. J. Eng. Mech. 2009, 135, 1343–1353. [Google Scholar] [CrossRef]
- Annamdas, V.G.M. Review on Developments in Fiber Optical Sensors and Applications. Int. J. Mater. Eng. 2011, 1, 1–16. [Google Scholar] [CrossRef]
- Li, D.; Ren, L.; Li, H. Mechanical Property and Strain Transferring Mechanism in Optical Fiber Sensors. In Fiber Optic Sensors; Yasin, M., Ed.; InTech: London, UK, 2012; pp. 439–458. [Google Scholar] [CrossRef]
- Her, S.C.; Huang, C.Y. Effect of Coating on the Strain Transfer of Optical Fiber Sensors. Sensors 2011, 11, 6926–6941. [Google Scholar] [CrossRef] [PubMed]
- Li, W.Y.; Cheng, C.C.; Lo, Y.L. Investigation of strain transmission of surface-bonded FBGs used as strain sensors. Sens. Actuator A Phys. 2009, 149, 201–207. [Google Scholar] [CrossRef]
- Cheng, C.C.; Lo, Y.L.; Pun, B.S.; Chang, Y.M.; Li, W.Y. An Investigation of Bonding-Layer Characteristics of Substrate-Bonded Fiber Bragg Grating. J. Light. Technol. 2005, 23, 3907–3915. [Google Scholar] [CrossRef]
- Bastianini, F.; Bolognini, G.; Marini, D.; Bochenski, P.; Di Sante, R.; Falcetelli, F. Optical fiber cables for Brillouin distributed sensing. In Proceedings of the Seventh European Workshop on Optical Fibre Sensors (EWOFS), Limassol, Cyprus, 1–4 October 2019; Volume 11199. [Google Scholar] [CrossRef]
- Feng, X.; Zhou, J.; Sun, C.; Zhang, X.; Ansari, F. Theoretical and Experimental Investigations into Crack Detection with BOTDR-Distributed Fiber Optic Sensors. J. Eng. Mech. 2013, 139, 1797–1807. [Google Scholar] [CrossRef]
- Billon, A.; Hénault, J.M.; Quiertant, M.; Taillade, F.; Khadour, A.; Martin, R.P.; Benzarti, K. Qualification of a distributed optical fiber sensor bonded to the surface of a concrete structure: A methodology to obtain quantitative strain measurements. Smart Mater. Struct. 2015, 24, 115001. [Google Scholar] [CrossRef]
- Imai, M.; Feng, M. Sensing optical fiber installation study for crack identification using a stimulated Brillouin-based strain sensor. Struct. Health Monit. 2012, 11, 501–509. [Google Scholar] [CrossRef]
- ASTM D1418-17. Standard Practice for Rubber and Rubber Latices—Nomenclature; ASTM International: West Conshohocken, PA, USA, 2017. [Google Scholar]
- Quirk, R.P.; Pickel, D.L. Polymerization: Elastomer Synthesis. In The Science and Technology of Rubber, 4th ed.; Erman, B., Mark, J.E., Roland, C.M., Eds.; Academic Press-Elsevier: Waltham, MA, USA, 2013; pp. 27–113. [Google Scholar] [CrossRef]
- Poon, B.C.; Dias, P.; Ansems, P.; Chum, S.P.; Hiltner, A.; Baer, E. Structure and Deformation of an Elastomeric Propylene–Ethylene Copolymer. J. Appl. Polym. Sci. 2007, 104, 489–499. [Google Scholar] [CrossRef]
- Meyers, M.A.; Chawla, K.K. Mechanical Behavior of Materials, 2nd ed.; Cambridge University Press: Cambridge, UK, 2009; pp. 71–160. [Google Scholar]
- Nair, T.M.; Kumaran, M.G.; Unnikrishnan, G.; Pillai, V.B. Dynamic Mechanical Analysis of Ethylene–Propylene–Diene Monomer Rubber and Styrene–Butadiene Rubber Blends. J. Appl. Polym. Sci. 2009, 112, 72–81. [Google Scholar] [CrossRef]
- Menard, K.P.; Menard, N. Dynamic Mechanical Analysis. In Encyclopedia of Analytical Chemistry (Applications, Theory and Instrumentation); Meyers, R.A., Ed.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2017; pp. 1–25. [Google Scholar] [CrossRef]
- Roylance, D. Mechanics of Materials, 1st ed.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 1996. [Google Scholar]
- Findley, W.N.; Lai, J.S.; Onaran, K. Creep and Relaxation of Nonlinear Viscoelastic Materials; Dover Publications, Inc.: New York, NY, USA, 1989; pp. 1–107. [Google Scholar]
- McKeen, L.W. The Effect of Creep and Other Time Related Factors on Plastics and Elastomers, 3rd ed.; William Andrew–Elsevier: Oxford, UK, 2015; pp. 5–6. [Google Scholar]
- Starkova, O.; Aniskevich, A. Limits of linear viscoelastic behavior of polymers. Mech. Time Depend. Mater. 2007, 11, 111–126. [Google Scholar] [CrossRef]
- Ward, I.M.; Sweeney, J. An Introduction to the Mechanical Properties of Solid Polymers, 2nd ed.; John Wiley & Sons Ltd.: Chichester, UK, 2004; pp. 219–240. [Google Scholar]
- Li, J.L.; Zhou, Z.; Ou, J.P. Interface Transferring Mechanism and Error Modification of Embedded FBG Strain Sensor Based on Creep: Part I. Linear Viscoelasticity. Smart Structures and Materials 2005: Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 17 May 2005; Volume 5765, pp. 1061–1072. [Google Scholar] [CrossRef]





















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bastianini, F.; Di Sante, R.; Falcetelli, F.; Marini, D.; Bolognini, G. Optical Fiber Sensing Cables for Brillouin-Based Distributed Measurements. Sensors 2019, 19, 5172. https://doi.org/10.3390/s19235172
Bastianini F, Di Sante R, Falcetelli F, Marini D, Bolognini G. Optical Fiber Sensing Cables for Brillouin-Based Distributed Measurements. Sensors. 2019; 19(23):5172. https://doi.org/10.3390/s19235172
Chicago/Turabian StyleBastianini, Filippo, Raffaella Di Sante, Francesco Falcetelli, Diego Marini, and Gabriele Bolognini. 2019. "Optical Fiber Sensing Cables for Brillouin-Based Distributed Measurements" Sensors 19, no. 23: 5172. https://doi.org/10.3390/s19235172
APA StyleBastianini, F., Di Sante, R., Falcetelli, F., Marini, D., & Bolognini, G. (2019). Optical Fiber Sensing Cables for Brillouin-Based Distributed Measurements. Sensors, 19(23), 5172. https://doi.org/10.3390/s19235172