Magnetic Field Sensor Based on a Tri-Microfiber Coupler Ring in Magnetic Fluid and a Fiber Bragg Grating

 ,
,  ,
, 

Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
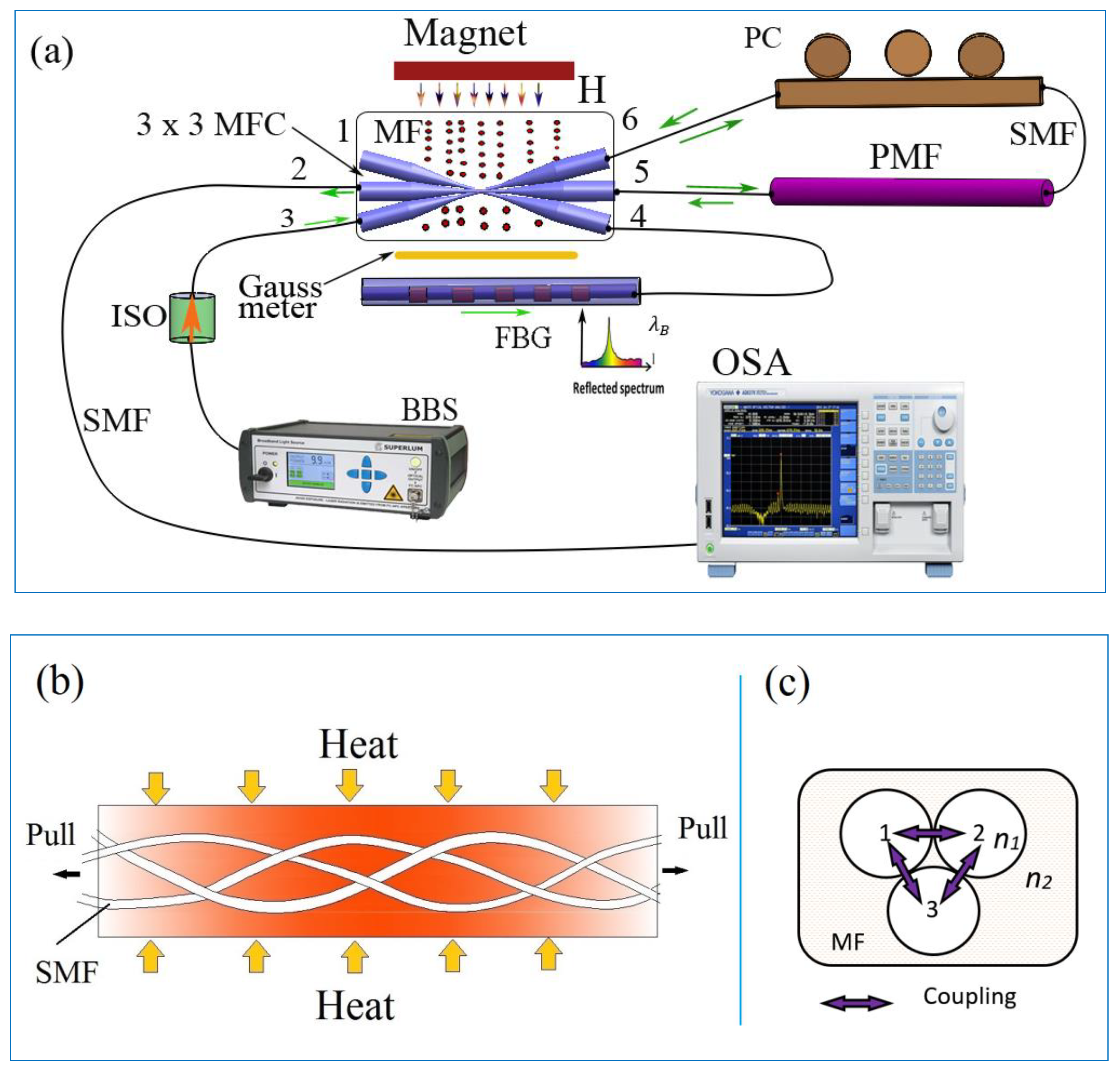
2.2. Proposed Structure and Fabrication
2.3. Theoretical Analysis and Operating Principle
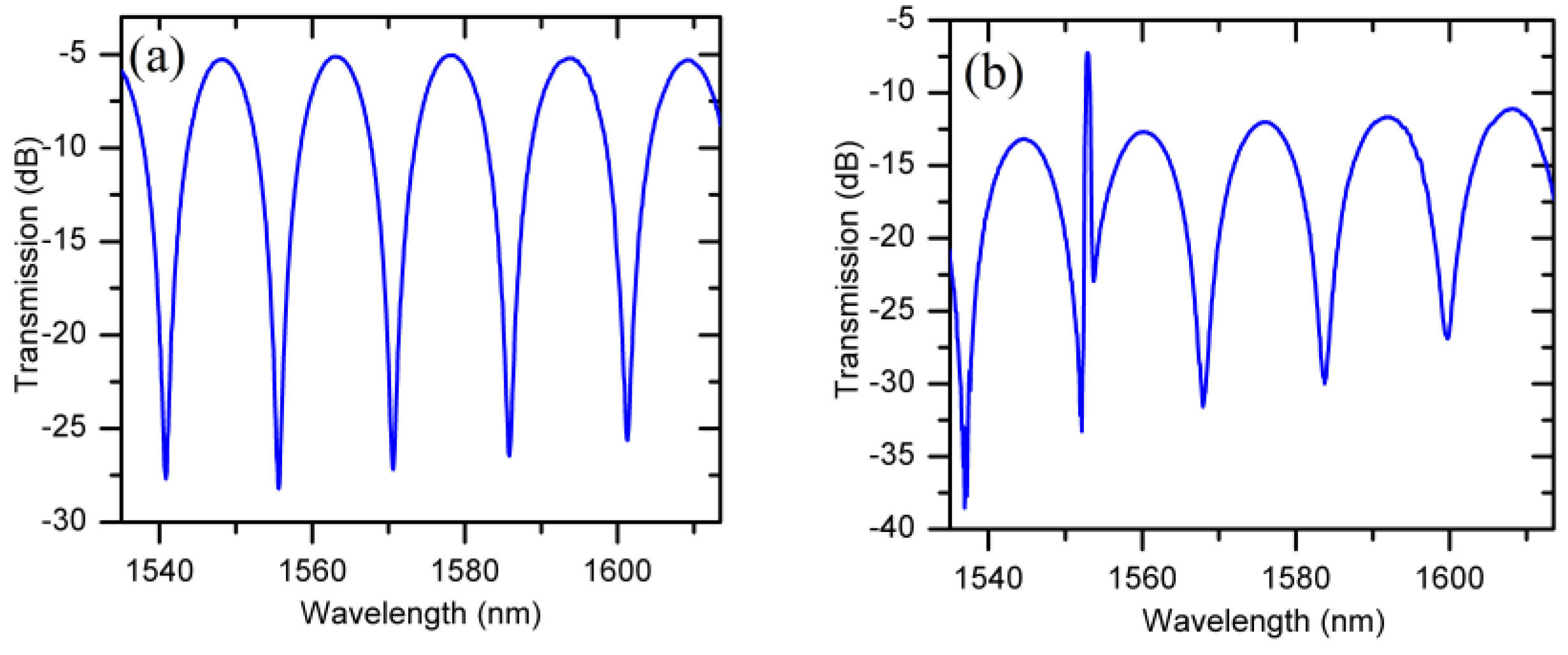
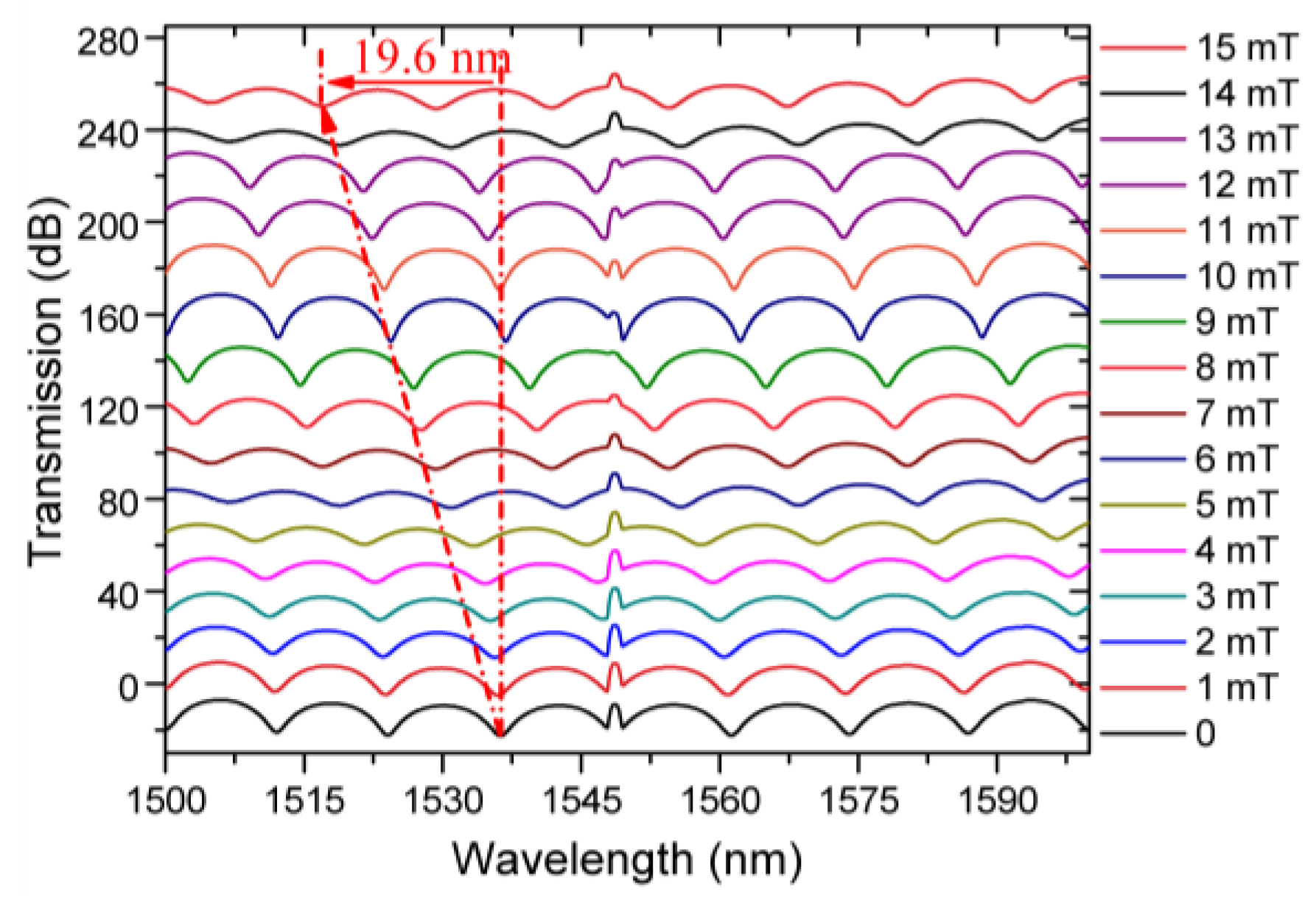
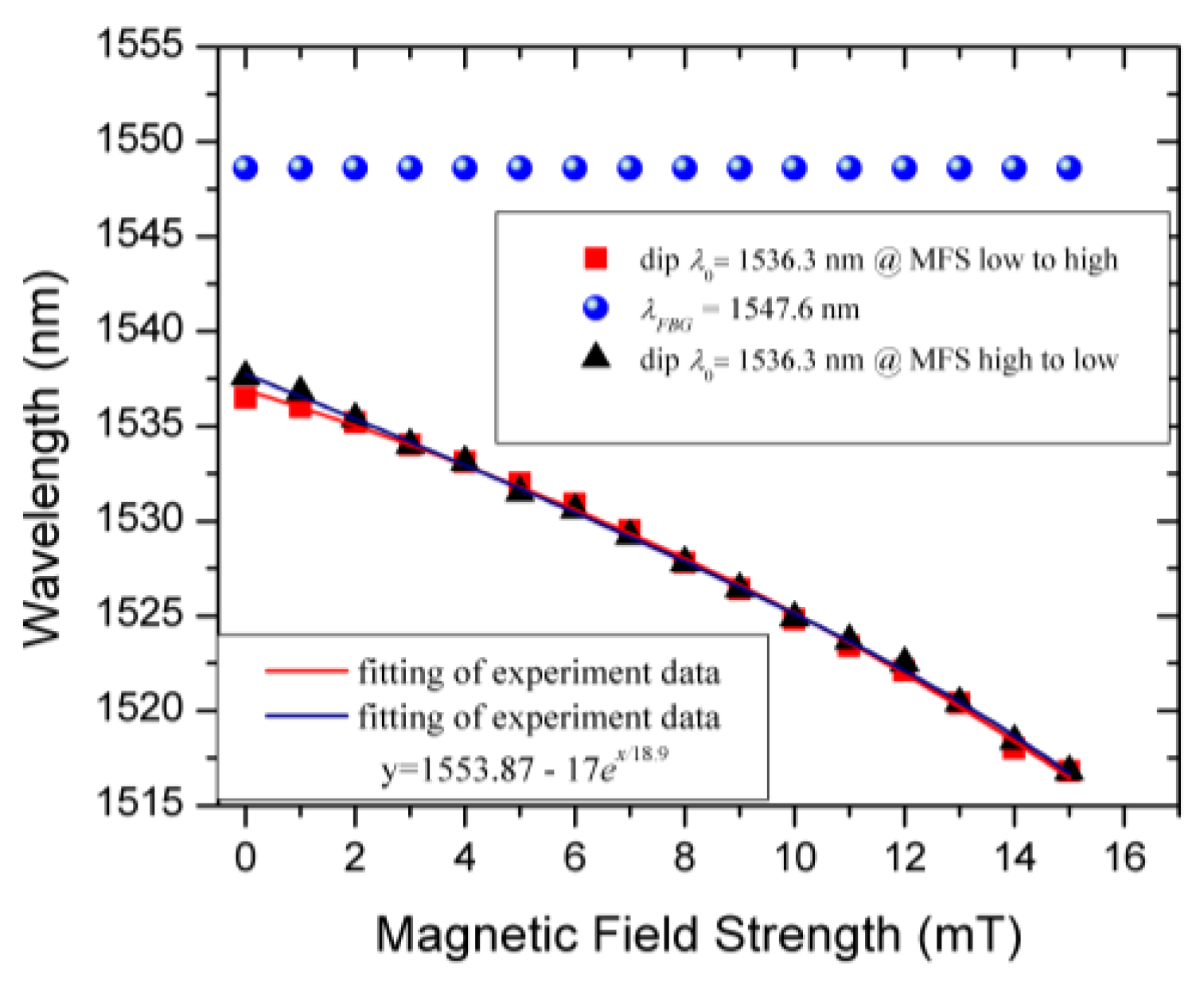
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alberto, N.; Domingues, M.F.; Marques, C.; André, P.; Antunes, P. Optical fiber magnetic field sensors based on magnetic fluid: A review. Sensors 2018, 18, 4325. [Google Scholar] [CrossRef]
- Li, W.; Wang, J. Magnetic sensors for navigation applications: An overview. J. Navig. 2014, 67, 263–275. [Google Scholar] [CrossRef]
- Chen, Y.T.; Kolhatkar, A.G.; Zenasni, O.; Xu, S.; Lee, T.R. Biosensing using magnetic particle detection techniques. Sensors 2017, 17, 2300. [Google Scholar] [CrossRef] [PubMed]
- Tian, Q.; Feng, Z.; Rong, Q.; Wan, Y.; Qiao, X.; Hu, M.; Yang, H.; Wang, R.; Shao, Z.; Yang, T. A temperature-independent fibre-optic magnetic-field sensor using thin-core fibre tailored fibre Bragg grating. Opt. Commun. 2017, 393, 169–172. [Google Scholar] [CrossRef]
- Wei, F.; Mallik, A.K.; Liu, D.; Wu, Q.; Peng, G.D.; Farrell, G.; Semenova, Y. Magnetic field sensor based on a combination of a microfiber coupler covered with magnetic fluid and a Sagnac loop. Sci. Rep. 2017, 7, 4725. [Google Scholar] [CrossRef]
- Wei, F.; Liu, D.; Mallik, A.K.; Farrell, G.; Wu, Q.; Peng, G.-D.; Semenova, Y. Temperature-compensated magnetic field sensing with a dual-ring structure consisting of microfiber coupler-Sagnac loop and fiber Bragg grating-assisted resonant cavity. Appl. Opt. 2019, 58, 2334. [Google Scholar] [CrossRef]
- Rodríguez-Schwendtner, E.; Díaz-Herrera, N.; Navarrete, M.C.; González-Cano, A.; Esteban, Ó. Plasmonic sensor based on tapered optical fibers and magnetic fluids for measuring magnetic fields. Sens. Actuators A Phys. 2017, 264, 58–62. [Google Scholar] [CrossRef]
- Jiang, Z.; Dong, J.; Hu, S.; Zhang, Y.; Chen, Y.; Luo, Y.; Zhu, W.; Qiu, W.; Lu, H.; Guan, H.; et al. High-sensitivity vector magnetic field sensor based on side-polished fiber plasmon and ferrofluid. Opt. Lett. 2018, 43, 4743. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, W.; Zhang, Y.; Liu, G.; Luo, Y.; Dong, J.; Zhong, Y.; Zhu, W.; Yu, J.; Chen, Z. Magnetic nanoparticles functionalized few-mode-fiber-based plasmonic vector magnet. Nanomaterials 2019, 9, 785. [Google Scholar] [CrossRef]
- Luo, L.; Pu, S.; Dong, S.; Tang, J. Fiber-optic magnetic field sensor using magnetic fluid as the cladding. Sens. Actuators A Phys. 2015, 236, 67–72. [Google Scholar] [CrossRef]
- Liu, Q.; Li, S.G.; Wang, X. Sensing characteristics of a MF-filled photonic crystal fiber Sagnac interferometer for magnetic field detecting. Sens. Actuators B Phys. 2017, 242, 949–955. [Google Scholar] [CrossRef]
- Li, Y.; Pu, S.; Zhao, Y.; Yao, T. Fiber-optic magnetic field sensing based on microfiber knot resonator with magnetic fluid cladding. Sensors 2018, 18, 4358. [Google Scholar] [CrossRef] [PubMed]
- Lacroix, S. Fused bitapered fiber devices for telecommunication and sensing systems. Glas. Integr. Opt. Opt. Fiber Devices A Crit. Rev. 2017, 10275, 102750N. [Google Scholar]
- Haus, H.; Fonstad, C. Three-waveguide couplers for improved sampling and filtering. IEEE J. Quantum Electron. 2004, 17, 2321–2325. [Google Scholar] [CrossRef]
- Ahsani, V.; Ahmed, F.; Jun, M.B.G.; Bradley, C. Tapered fiber-optic mach-zehnder interferometer for ultra-high sensitivity measurement of refractive index. Sensors 2019, 19, 1652. [Google Scholar] [CrossRef]
- Wu, T.L.; Ou, H.J. A vector power coupling model for analyzing polarization-dependent loss of equilateral triangular 3 × 3 weakly fused fiber couplers. Opt. Commun. 2003, 224, 81–88. [Google Scholar] [CrossRef]
- Sarunic, M.V.; Choma, M.A.; Yang, C.; Izatt, J.A. Instantaneous complex conjugate resolved spectral domain and swept-source OCT using 3 × 3 fiber couplers. Opt. Express 2005, 13, 957–967. [Google Scholar] [CrossRef]
- Choma, M.A.; Yang, C.; Izatt, J.A. Instantaneous quadrature low coherence interferometry with 3 × 3 fiber optic couplers. Proc. OSA Trends Opt. Photonics Ser. 2003, 28, 2162. [Google Scholar] [CrossRef]
- You, A.; Be, M.A.Y.; In, I. Optical fiber interferometers with [3 × 3] directional couplers: Analysis. App. Phys. 1998, 52, 3865. [Google Scholar]
- Brambilla, G.; Xu, F.; Horak, P.; Jung, Y.; Koizumi, F.; Sessions, N.P.; Koukharenko, E.; Feng, X.; Murugan, G.S.; Wilkinson, J.S.; et al. Optical fiber nanowires and microwires: Fabrication and applications. Adv. Opt. Photonics 2009, 1, 107–161. [Google Scholar] [CrossRef]
- Zhao, Y.; Lv, R.Q.; Wang, D.; Wang, Q. Fiber optic fabry-perot magnetic field sensor with temperature compensation using a fiber Bragg grating. IEEE Trans. Instrum. Meas. 2014, 63, 2210–2214. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | Sensitivity | Vector | Temperature | Reference |
|---|---|---|---|---|
| Thin-core fiber-FBG | −0.78 dB/m | No | Yes | [4] |
| 2 × 2 MFC Sagnac | −488 pm/mT | Yes | No | [5] |
| MFC and FBG based fiber laser | 102 pm/mT | No | Yes | [6] |
| Surface Plasmon Resonance (SPR) | 10 nm/mT | No | No | [7] |
| SPR | 597.8 pm/Oe | Yes | No | [8] |
| SPR | 0.692 nm/Oe | Yes | No | [9] |
| Cascaded fiber hetero structures | 65.9 pm/Oe | No | Yes | [10] |
| Photonic crystal fiber | 384 pm/Oe | No | No | [11] |
| Microfiber Knot Resonator | 277 pm/mT | No | No | [12] |
| 3 × 3 MFC Sagnac | 1306 pm/mT | Yes | Yes | This work |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, F.; Liu, D.; Mallik, A.K.; Farrel, G.; Wu, Q.; Peng, G.-D.; Semenova, Y. Magnetic Field Sensor Based on a Tri-Microfiber Coupler Ring in Magnetic Fluid and a Fiber Bragg Grating. Sensors 2019, 19, 5100. https://doi.org/10.3390/s19235100
Wei F, Liu D, Mallik AK, Farrel G, Wu Q, Peng G-D, Semenova Y. Magnetic Field Sensor Based on a Tri-Microfiber Coupler Ring in Magnetic Fluid and a Fiber Bragg Grating. Sensors. 2019; 19(23):5100. https://doi.org/10.3390/s19235100
Chicago/Turabian StyleWei, Fangfang, Dejun Liu, Arun Kumar Mallik, Gerald Farrel, Qiang Wu, Gang-Ding Peng, and Yuliya Semenova. 2019. "Magnetic Field Sensor Based on a Tri-Microfiber Coupler Ring in Magnetic Fluid and a Fiber Bragg Grating" Sensors 19, no. 23: 5100. https://doi.org/10.3390/s19235100
APA StyleWei, F., Liu, D., Mallik, A. K., Farrel, G., Wu, Q., Peng, G.-D., & Semenova, Y. (2019). Magnetic Field Sensor Based on a Tri-Microfiber Coupler Ring in Magnetic Fluid and a Fiber Bragg Grating. Sensors, 19(23), 5100. https://doi.org/10.3390/s19235100