Computer Vision and IoT-Based Sensors in Flood Monitoring and Mapping: A Systematic Review

 ,
,  , ,
, ,  , and
, and
Abstract
1. Introduction
- A detailed survey is presented on the use of computer vision and IoT-based sensors for flood monitoring, prediction and inundation mapping. The scope covers the state-of-the-art applications of computer vision and sensor integrated approaches for managing coastal sites and other flood-prone urban areas.
- The study highlights gaps in the literature and recommends directions for future research.
2. Methodology
3. Computer Vision and IoT Sensors for Early Warning Systems
3.1. Computer Vision for Estimating the Water Level
3.2. IoT-Based Sensors for Estimating Water Level
3.3. Data Collection and Early Warning System
4. Computer Vision for Flood Modelling and Mapping
4.1. Overview of Research Progress
4.2. Computer Vision and Data Fusion for Flood Mapping
4.3. Computer Vision for Debris Flow Estimation
4.4. Computer Vision in Estimating Surface Water Velocity for Hydrodynamic Modelling of Floods
5. Analysis of Computer Vision Against Addressed Requirements
6. Recommendations for Future Research
Recommended Future Research of Computer Vision and IoT Sensors in Monitoring Coastal Lagoons
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dilley, M.; Chen, R.S.; Deichmann, U.; Lerner-Lam, A.L.; Arnold, M. Natural Disaster Hotspots: A Global Risk Analysis; The World Bank: Washington, DC, USA, 2005. [Google Scholar]
- Mosquera-Machado, S.; Dilley, M. A comparison of selected global disaster risk assessment results. Nat. Hazards 2009, 48, 439–456. [Google Scholar] [CrossRef]
- Kuenzer, C.; Guo, H.; Huth, J.; Leinenkugel, P.; Li, X.; Dech, S. Flood mapping and flood dynamics of the mekong delta: ENVISAT-ASAR-WSM based time series analyses. Remote. Sens. 2013, 5, 687–715. [Google Scholar] [CrossRef]
- CRED. EM-DAT: The OFDA/CRED International Disaster Database; Catholic University of Leuven: Brussels, Belgium, 2019. [Google Scholar]
- Basha, E.; Rus, D. Design of early warning flood detection systems for developing countries. In Proceedings of the 2007 International Conference on Information and Communication Technologies and Development, Bangalore, India, 15–16 December 2007. [Google Scholar]
- Jonkman, S.N.; Kelman, I. An Analysis of the Causes and Circumstances of Flood Disaster Deaths. Disasters 2005, 29, 75–97. [Google Scholar] [CrossRef]
- Hirabayashi, Y.; Mahendran, R.; Koirala, S.; Konoshima, L.; Yamazaki, D.; Watanabe, S.; Kim, H.; Kanae, S. Global flood risk under climate change. Nat. Clim. Chang. 2013, 3, 816–821. [Google Scholar] [CrossRef]
- Ko, B.; Kwak, S. Survey of computer vision–based natural disaster warning systems. Opt. Eng. 2012, 51, 70901. [Google Scholar] [CrossRef]
- Kanwal, K.; Liaquat, A.; Mughal, M.; Abbasi, A.R.; Aamir, M. Towards development of a low cost early fire detection system using wireless sensor network and machine vision. Wirel. Pers. Commun. 2017, 95, 475–489. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. Isprs J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Bande, S.; Shete, V.V. Smart flood disaster prediction system using IoT & neural networks. In Proceedings of the 2017 International Conference on Smart Technologies for Smart Nation (SmartTechCon), Bangalore, India, 17–19 August 2017. [Google Scholar]
- Barthélemy, J.; Verstaevel, N.; Forehead, H.; Perez, P. Edge-Computing Video Analytics for Real-Time Traffic Monitoring in a Smart City. Sensors 2019, 19, 2048. [Google Scholar] [CrossRef] [PubMed]
- Yuliandoko, H.; Subono, S.; Wardhani, V.A.; Pramono, S.H.; Suwindarto, P. Design of Flood Warning System Based IoT and Water Characteristics. Telkomnika (Telecommun. Comput. Electron. Control.) 2018, 16, 2101–2110. [Google Scholar] [CrossRef]
- Keung, K.L.; Lee, C.K.M.; Ng, K.K.H.; Yeung, C.K. Smart city application and analysis: Real-time urban drainage monitoring by iot sensors: A case study of Hong Kong. In Proceedings of the 2018 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Bangkok, Thailand, 16–19 December 2018. [Google Scholar]
- McInnes, M.D.F.; Moher, D.; Thombs, B.D.; McGrath, T.A.; Bossuyt, P.M.; the PRISMA-DTA Group; Clifford, T.; Cohen, J.F.; Deeks, J.J.; Gatsonis, C.; et al. Preferred Reporting Items for a Systematic Review and Meta-analysis of Diagnostic Test Accuracy Studies: The PRISMA-DTA Statement. JAMA 2018, 319, 388–396. [Google Scholar] [CrossRef]
- Mocanu, B.; Tapu, R.; Zaharia, T. When ultrasonic sensors and computer vision join forces for efficient obstacle detection and recognition. Sensors 2016, 16, 1807. [Google Scholar] [CrossRef] [PubMed]
- Basha, E.A.; Ravela, S.; Rus, D. Model-based monitoring for early warning flood detection. In Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems, Raleigh, NC, USA, 5–7 November 2008. [Google Scholar]
- Yu, J.; Hahn, H. Remote detection and monitoring of a water level using narrow band channel. J. Inf. Sci. Eng. 2010, 26, 71–82. [Google Scholar]
- Hiroi, K.; Kawaguchi, N. FloodEye: Real-time flash flood prediction system for urban complex water flow. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016. [Google Scholar]
- Pan, J.; Yin, Y.; Xiong, J.; Luo, W.; Gui, G.; Sari, H. Deep Learning-based unmanned surveillance systems for observing water levels. IEEE Access 2018, 6, 73561–73571. [Google Scholar] [CrossRef]
- Rankin, A.L.; Matthies, L.H.; Huertas, A. Daytime water detection by fusing multiple cues for autonomous off-road navigation. In Transformational Science and Technology for the Current and Future Force; World Scientific: Singapore, 2006; pp. 177–184. [Google Scholar]
- Rankin, A.; Matthies, L. Daytime water detection based on color variation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Park, S.; Lee, N.; Han, Y.; Hahn, H. The water level detection algorithm using the accumulated histogram with band pass filter. Acad. Sci. Eng. Technol. 2009, 56, 193–197. [Google Scholar]
- Udomsiri, S.; Iwahashi, M. Design of FIR filter for water level detection. World Acad. Sci. Technol. 2008, 48, 47–52. [Google Scholar]
- Zhang, Z.; Zhou, Y.; Liu, H.; Gao, H. In-situ water level measurement using NIR-imaging video camera. Flow Meas. Instrum. 2019, 67, 95–106. [Google Scholar] [CrossRef]
- Hsu, S.-Y.; Chen, T.-B.; Du, W.-C.; Wu, J.-H.; Chen, S.-C. Integrate Weather Radar and Monitoring Devices for Urban Flooding Surveillance. Sensors 2019, 19, 825. [Google Scholar] [CrossRef]
- Ridolfi, E.; Manciola, P. Water Level Measurements from Drones: A Pilot Case Study at a Dam Site. Water 2018, 10, 297. [Google Scholar] [CrossRef]
- Lo, S.-W.; Wu, J.-H.; Lin, F.-P.; Hsu, C.-H. Visual Sensing for Urban Flood Monitoring. Sensors 2015, 15, 20006–20029. [Google Scholar] [CrossRef]
- Krzhizhanovskaya, V.; Shirshov, G.; Melnikova, N.; Belleman, R.; Rusadi, F.; Broekhuijsen, B.; Gouldby, B.; Lhomme, J.; Balis, B.; Bubak, M.; et al. Flood early warning system: Design, implementation and computational modules. Procedia Comput. Sci. 2011, 4, 106–115. [Google Scholar] [CrossRef]
- Bączyk, A.; Piwiński, J.; Kłoda, R.; Grygoruk, M. Survey on river water level measuring technologies: Case study for flood management purposes of the C2-SENSE project. In Proceedings of the International Conference on Systems, Control and Information Technologies, Warsaw, Poland, 20–21 May 2016. [Google Scholar]
- Rachman, S.; Pratomo, I.; Mita, N. Design of low cost wireless sensor networks-based environmental monitoring system for developing country. In Proceedings of the 2008 14th Asia-Pacific Conference on Communications, Tokyo, Japan, 14–16 October 2008. [Google Scholar]
- Hagedorn, P.; Wallaschek, J. Travelling wave ultrasonic motors, Part I: Working principle and mathematical modelling of the stator. J. Sound Vib. 1992, 155, 31–46. [Google Scholar] [CrossRef]
- Ward, D.; Petty, A.; Setterfield, S.; Douglas, M.; Ferdinands, K.; Hamilton, S.; Phinn, S. Floodplain inundation and vegetation dynamics in the Alligator Rivers region (Kakadu) of northern Australia assessed using optical and radar remote sensing. Remote. Sens. Environ. 2014, 147, 43–55. [Google Scholar] [CrossRef]
- Lin, L.; Di, L.; Yu, E.G.; Kang, L.; Shrestha, R.; Rahman, M.S.; Tang, J.; Deng, M.; Sun, Z.; Zhang, C.; et al. A review of remote sensing in flood assessment. In Proceedings of the 2016 Fifth International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Tianjin, China, 18–20 July 2016. [Google Scholar]
- Khan, T.A.; Alam, M.; Kadir, K.; Shahid, Z.; Mazliham, S.M. A Novel approach for the investigation of flash floods using soil flux and CO2: An implementation of MLP with less false alarm rate. In Proceedings of the 2018 2nd International Conference on Smart Sensors and Application (ICSSA), Kuching, Malaysia, 24–26 July 2018. [Google Scholar]
- Noar, N.A.Z.M.; Kamal, M.M. The development of smart flood monitoring system using ultrasonic sensor with blynk applications. In Proceedings of the 2017 IEEE 4th International Conference on Smart Instrumentation, Measurement and Application (ICSIMA), Putrajaya, Malaysia, 28–30 November 2017. [Google Scholar]
- Purkovic, D.; Coates, L.; Hönsch, M.; Lumbeck, D.; Schmidt, F. Smart river monitoring and early flood detection system in Japan developed with the EnOcean long range sensor technology. In Proceedings of the 2019 2nd International Colloquium on Smart Grid Metrology (SMAGRIMET), Split, Croatia, 9–12 April 2019. [Google Scholar]
- Kafli, N.; Isa, K. Internet of Things (IoT) for measuring and monitoring sensors data of water surface platform. In Proceedings of the 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications (USYS), Kuala Lumpur, Malaysia, 18–20 December 2017. [Google Scholar]
- Chandanala, R.; Zhang, W.; Stoleru, R.; Won, M. On combining network coding with duty-cycling in flood-based wireless sensor networks. Ad Hoc Netw. 2013, 11, 490–507. [Google Scholar] [CrossRef][Green Version]
- Lin, Y.B.; Lai, J.S.; Chang, K.C.; Li, L.S. Flood scour monitoring system using fiber Bragg grating sensors. Smart Mater. Struct. 2006, 15, 1950. [Google Scholar] [CrossRef]
- Thekkil, T.M.; Prabakaran, N. Real-time WSN based early flood detection and control monitoring system. In Proceedings of the 2017 International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, India, 6–7 July 2017. [Google Scholar]
- Balaji, V.; Akshaya, A.; Jayashree, N.; Karthika, T. Design of ZigBee based wireless sensor network for early flood monitoring and warning system. In Proceedings of the 2017 IEEE Technological Innovations in ICT for Agriculture and Rural Development (TIAR), Chennai, India, 7–8 April 2017. [Google Scholar]
- Pratama, A.; Munadi, R.; Mayasari, R. Design and implementation of flood detector using wireless sensor network with mamdani’s fuzzy logic method. In Proceedings of the 2017 2nd International conferences on Information Technology, Information Systems and Electrical Engineering (ICITISEE), Yogyakarta, Indonesia, 1–2 November 2017. [Google Scholar]
- Al-Assadi, W.K.; Gandla, S.; Sedigh, S.; Dugganapally, I.P. Design of a flood prediction system. In Proceedings of the 2009 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009. [Google Scholar]
- Ogie, R.; Shukla, N.; Sedlar, F.; Holderness, T. Optimal placement of water-level sensors to facilitate data-driven management of hydrological infrastructure assets in coastal mega-cities of developing nations. Sustain. Cities Soc. 2017, 35, 385–395. [Google Scholar] [CrossRef]
- Abdelkader, M.; Shaqura, M.; Claudel, C.G.; Gueaieb, W. A UAV based system for real time flash flood monitoring in desert environments using Lagrangian microsensors. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013. [Google Scholar]
- Zhuang, W.Y.; Junior, M.C.; Cheong, P.; Tam, K.W. Flood monitoring of distribution substation in low-lying areas using Wireless Sensor Network. In Proceedings of the 2011 International Conference on System Science and Engineering, Macao, China, 8–10 June 2011. [Google Scholar]
- Garcia, F.C.C.; Retamar, A.E.; Javier, J.C. A real time urban flood monitoring system for metro Manila. In Proceedings of the TENCON 2015-2015 IEEE Region 10 Conference, Macao, China, 1–4 November 2015. [Google Scholar]
- Napiah, M.N.; Idris, M.Y.I.; Ahmedy, I.; Ngadi, M.A. Flood alerts system with android application. In Proceedings of the 2017 6th ICT International Student Project Conference (ICT-ISPC), Skudai, Malaysia, 23–24 May 2017. [Google Scholar]
- Intharasombat, O.; Khoenkaw, P. A low-cost flash flood monitoring system. In Proceedings of the 2015 7th International Conference on Information Technology and Electrical Engineering (ICITEE), Chiang Mai, Thailand, 29–30 October 2015. [Google Scholar]
- Jayashree, S.; Sarika, S.; Solai, A.L.; Prathibha, S. A novel approach for early flood warning using android and IoT. In Proceedings of the 2017 2nd International Conference on Computing and Communications Technologies (ICCCT), Chennai, India, 23–24 February 2017. [Google Scholar]
- Teixidó, P.; Gómez-Galán, J.A.; Gómez-Bravo, F.; Sánchez-Rodríguez, T.; Alcina, J.; Aponte, J. Low-Power Low-Cost Wireless Flood Sensor for Smart Home Systems. Sensors 2018, 18, 3817. [Google Scholar] [CrossRef]
- Smith, P.J.; Hughes, D.; Beven, K.J.; Cross, P.; Tych, W.; Coulson, G.; Blair, G.S.; Tych, W. Towards the provision of site specific flood warnings using wireless sensor networks. Meteorol. Appl. 2009, 16, 57–64. [Google Scholar] [CrossRef]
- Yumang, A.N.; Paglinawan, C.C.; Paglinawan, A.C.; Avendaño, G.O.; Esteves, J.A.C.; Pagaduan, J.R.P.; Selda, J.D.S. Real-time flood water level monitoring system with SMS notification. In Proceedings of the 2017 IEEE 9th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Manila, Philippines, 1–3 December 2017. [Google Scholar]
- Terzic, J.; Nagarajah, C.; Alamgir, M. Fluid level measurement in dynamic environments using a single ultrasonic sensor and Support Vector Machine (SVM). Sens. Actuators A Phys. 2010, 161, 278–287. [Google Scholar] [CrossRef]
- Widiasari, I.R.; Nugroho, L.E. Deep learning multilayer perceptron (MLP) for flood prediction model using wireless sensor network based hydrology time series data mining. In Proceedings of the 2017 International Conference on Innovative and Creative Information Technology (ICITech), Salatiga, Indonesia, 2–4 November 2017. [Google Scholar]
- Khan, T.A.; Alam, M.; Shahid, Z.; Ahmed, S.F.; Mazliham, M.S. Artificial Intelligence based Multi-modal sensing for flash flood investigation. In Proceedings of the 2018 IEEE 5th International Conference on Engineering Technologies and Applied Sciences (ICETAS), Bangkok, Thailand, 22–23 November 2018. [Google Scholar]
- Cruz, F.R.G.; Binag, M.G.; Ga, M.R.G.; Uy, F.A.A. Flood Prediction Using Multi-Layer Artificial Neural Network in Monitoring System with Rain Gauge, Water Level, Soil Moisture Sensors. In Proceedings of the TENCON 2018-2018 IEEE Region 10 Conference, Jeju, Korea, 28–31 October 2018. [Google Scholar]
- Mousa, M.; Oudat, E.; Claudel, C. A novel dual traffic/flash flood monitoring system using passive infrared/ultrasonic sensors. In Proceedings of the 2015 IEEE 12th International Conference on Mobile Ad Hoc and Sensor Systems, Dallas, TX, USA, 19–22 October 2015. [Google Scholar]
- Mousa, M.; Zhang, X.; Claudel, C.; Moussa, M. Flash Flood Detection in Urban Cities Using Ultrasonic and Infrared Sensors. IEEE Sens. J. 2016, 16, 7204–7216. [Google Scholar] [CrossRef]
- Ancona, M.; Corradi, N.; Dellacasa, A.; Delzanno, G.; Dugelay, J.-L.; Federici, B.; Gourbesville, P.; Guerrini, G.; La Camera, A.; Rosso, P.; et al. On the design of an intelligent sensor network for flash flood monitoring, diagnosis and management in urban areas position paper. Procedia Comput. Sci. 2014, 32, 941–946. [Google Scholar] [CrossRef]
- Horita, F.E.; De Albuquerque, J.P.; Degrossi, L.C.; Mendiondo, E.M.; Ueyama, J. Development of a spatial decision support system for flood risk management in Brazil that combines volunteered geographic information with wireless sensor networks. Comput. Geosci. 2015, 80, 84–94. [Google Scholar] [CrossRef]
- Neal, J.C.; Atkinson, P.M.; Hutton, C.W. Adaptive space–time sampling with wireless sensor nodes for flood forecasting. J. Hydrol. 2012, 414, 136–147. [Google Scholar] [CrossRef]
- Ray, P.P.; Mukherjee, M.; Shu, L. Internet of Things for Disaster Management: State-of-the-Art and Prospects. IEEE Access 2017, 5, 18818–18835. [Google Scholar] [CrossRef]
- Perumal, T.; Sulaiman, M.N.; Leong, C.Y. Internet of Things (IoT) enabled water monitoring system. In Proceedings of the 2015 IEEE 4th Global Conference on Consumer Electronics (GCCE), Osaka, Japan, 27–30 October 2015. [Google Scholar]
- Moreno, C.; Aquino, R.; Ibarreche, J.; Pérez, I.; Castellanos, E.; Álvarez, E.; Rentería, R.; Anguiano, L.; Edwards, A.; Lepper, P.; et al. RiverCore: IoT Device for River Water Level Monitoring over Cellular Communications. Sensors 2019, 19, 127. [Google Scholar] [CrossRef]
- Purnomo, R.; Pamungkas, M.H.; Arrofi, D.; Goni, A. Flood prediction using integrated sensor based on internet of thing and radio frequency as flood risk reduction. AIP Conf. Proc. 2018, 1987, 020070. [Google Scholar]
- Mostafa, E.; Mohamed, E. Intelligent data classification and aggregation in wireless sensors for flood forecasting system. In Proceedings of the 2014 Mediterranean Microwave Symposium (MMS2014), Marrakech, Morocco, 12–14 December 2014. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Available online: http://papers.nips.cc/paper/4824-imagenet-classification-with-deep-convolutional-neural-networks.pdf (accessed on 16 November 2019).
- Lopez-Fuentes, L.; Rossi, C.; Skinnemoen, H. River segmentation for flood monitoring. In Proceedings of the 2017 IEEE International Conference on Big Data (Big Data), Boston, MA, USA, 11–14 December 2017; pp. 3746–3749. [Google Scholar]
- Wang, R.-Q.; Mao, H.; Wang, Y.; Rae, C.; Shaw, W. Hyper-resolution monitoring of urban flooding with social media and crowdsourcing data. Comput. Geosci. 2018, 111, 139–147. [Google Scholar] [CrossRef]
- Arthur, R.; Boulton, C.A.; Shotton, H.; Williams, H.T. Social sensing of floods in the UK. PLoS ONE 2018, 13, e0189327. [Google Scholar] [CrossRef]
- Helber, P.; Bischke, B.; Dengel, A.; Borth, D. EuroSAT: a novel dataset and deep learning benchmark for land use and land cover classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 12, 2217–2226. [Google Scholar] [CrossRef]
- Rahnemoonfar, M.; Murphy, R.; Miquel, M.V.; Dobbs, D.; Adams, A. Flooded area detection from uav images based on densely connected recurrent neural networks. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Martinis, S.; Twele, A.; Strobl, C.; Kersten, J.; Stein, E. A Multi-Scale Flood Monitoring System Based on Fully Automatic MODIS and TerraSAR-X Processing Chains. Remote. Sens. 2013, 5, 5598–5619. [Google Scholar] [CrossRef]
- Mourato, S.; Fernandez, P.; Pereira, L.; Moreira, M. Improving a DSM Obtained by Unmanned Aerial Vehicles for Flood Modelling. IOP Conf. Ser. Earth Environ. Sci. 2017, 95, 22014. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Zhang, Y.; Huang, H.; Feng, L. Obtaining land cover type for urban storm flood model in UAV images using MRF and MKFCM clustering techniques. ISPRS Int. J. Geo-Inf. 2019, 8, 205. [Google Scholar] [CrossRef]
- Wagner, W.; Hollaus, M.; Briese, C.; Ducic, V. 3D vegetation mapping using small-footprint full-waveform airborne laser scanners. Int. J. Remote. Sens. 2008, 29, 1433–1452. [Google Scholar] [CrossRef]
- Jain, S.K.; Saraf, A.K.; Goswami, A.; Ahmad, T. Flood inundation mapping using NOAA AVHRR data. Water Resour. Manag. 2006, 20, 949–959. [Google Scholar] [CrossRef]
- Mueller, N.; Lewis, A.; Roberts, D.; Ring, S.; Melrose, R.; Sixsmith, J.; Lymburner, L.; McIntyre, A.; Tan, P.; Curnow, S.; et al. Water observations from space: Mapping surface water from 25 years of Landsat imagery across Australia. Remote. Sens. Environ. 2016, 174, 341–352. [Google Scholar] [CrossRef]
- Van der Sande, C.J.; De Jong, S.M.; De Roo, A.P.J. A segmentation and classification approach of IKONOS-2 imagery for land cover mapping to assist flood risk and flood damage assessment. Int. J. Appl. Earth Obs. Geoinf. 2003, 4, 217–229. [Google Scholar] [CrossRef]
- Horkaew, P.; Puttinaovarat, S. Entropy-Based Fusion of Water Indices and DSM Derivatives for Automatic Water Surfaces Extraction and Flood Monitoring. ISPRS Int. J. Geo-Inf. 2017, 6, 301. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Goldberg, M.D.; Sjoberg, B.; Santek, D.; Hoffman, J.P.; Deweese, M.; Restrepo, P.; Lindsey, S.; Holloway, E. Automatic near real-time flood detection using Suomi-NPP/VIIRS data. Remote. Sens. Environ. 2018, 204, 672–689. [Google Scholar] [CrossRef]
- Shen, L.; Li, C. Water body extraction from Landsat ETM+ imagery using adaboost algorithm. In Proceedings of the 2010 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010. [Google Scholar]
- Liu, X.; Sahli, H.; Meng, Y.; Huang, Q.; Lin, L. Flood inundation mapping from optical satellite images using Spatiotemporal Context Learning and Modest AdaBoost. Remote. Sens. 2017, 9, 617. [Google Scholar] [CrossRef]
- Hakdaoui, S.; Emran, A.; Pradhan, B.; Lee, C.-W.; Fils, S.C.N. A collaborative change detection approach on multi-sensor spatial imagery for desert wetland monitoring after a flash flood in Southern Morocco. Remote. Sens. 2019, 11, 1042. [Google Scholar] [CrossRef]
- Malandrino, F.; Chiasserini, C.-F.; Casetti, C.; Chiaraviglio, L.; Senacheribbe, A. Planning UAV activities for efficient user coverage in disaster areas. Ad Hoc Netw. 2019, 89, 177–185. [Google Scholar] [CrossRef]
- Popescu, D.; Ichim, L.; Stoican, F. Unmanned aerial vehicle systems for remote estimation of flooded areas based on complex image processing. Sensors 2017, 17, 446. [Google Scholar] [CrossRef] [PubMed]
- Casella, E.; Rovere, A.; Pedroncini, A.; Mucerino, L.; Casella, M.; Cusati, L.A.; Vacchi, M.; Ferrari, M.; Firpo, M. Study of wave runup using numerical models and low-altitude aerial photogrammetry: A tool for coastal management. Estuar. Coast. Shelf Sci. 2014, 149, 160–167. [Google Scholar] [CrossRef]
- Hashemi-Beni, L.; Jones, J.; Thompson, G.; Johnson, C.; Gebrehiwot, A. challenges and opportunities for UAV-based digital elevation model generation for flood-risk management: A case of Princeville, North Carolina. Sensors 2018, 18, 3843. [Google Scholar] [CrossRef] [PubMed]
- Langhammer, J.; Lendzioch, T.; Miřijovský, J.; Hartvich, F. UAV-based optical granulometry as tool for detecting changes in structure of flood depositions. Remote. Sens. 2017, 9, 240. [Google Scholar] [CrossRef]
- Isikdogan, F.; Bovik, A.C.; Passalacqua, P. Surface water mapping by deep learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2017, 10, 4909–4918. [Google Scholar] [CrossRef]
- Kang, W.; Xiang, Y.; Wang, F.; Wan, L.; You, H. Flood detection in gaofen-3 SAR images via fully convolutional networks. Sensors 2018, 18, 2915. [Google Scholar] [CrossRef]
- Gebrehiwot, A.; Hashemi-Beni, L.; Thompson, G.; Kordjamshidi, P.; Langan, T.E. Deep convolutional neural network for flood extent mapping using unmanned aerial vehicles data. Sensors 2019, 19, 1486. [Google Scholar] [CrossRef]
- Moy de Vitry, M.; Dicht, S.; Leitão, J.P. Leitão, floodX: Urban flash flood experiments monitored with conventional and alternative sensors. Earth Syst. Sci. Data 2017, 9, 657–666. [Google Scholar] [CrossRef]
- Lo, S.-W.; Wu, J.-H.; Lin, F.-P.; Hsu, C.-H. Cyber surveillance for flood disasters. Sensors 2015, 15, 2369–2387. [Google Scholar] [CrossRef]
- Jyh-Horng, W.; Chien-Hao, T.; Lun-Chi, C.; Shi-Wei, L.; Fang-Pang, L. Automated Image Identification Method for Flood Disaster Monitoring in Riverine Environments: A Case Study in Taiwan. In Proceedings of the AASRI International Conference on Industrial Electronics and Applications (IEA 2015), London, UK, 27–28 June 2015. [Google Scholar]
- Narayanan, R.; Lekshmy, V.M.; Rao, S.; Sasidhar, K. A novel approach to urban flood monitoring using computer vision. In Proceedings of the Fifth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Hefei, China, 11–13 July 2014. [Google Scholar]
- Zakaria, S.; Mahadi, M.R.; Abdullah, A.F.; Abdan, K. Aerial platform reliability for flood monitoring under various weather conditions: A review. In Proceedings of the GeoInformation for Disaster Management Conference, Istanbul, Turkey, 18–21 March 2018. [Google Scholar]
- Feng, Q.; Liu, J.; Gong, J. Urban flood mapping based on unmanned aerial vehicle remote sensing and random forest classifier—A case of Yuyao, China. Water 2015, 7, 1437–1455. [Google Scholar] [CrossRef]
- Popescu, D.; Ichim, L.; Caramihale, T. Flood areas detection based on UAV surveillance system. In Proceedings of the 2015 19th International Conference on System Theory, Control and Computing (ICSTCC), Cheile Gradistei, Romania, 14–16 October 2015. [Google Scholar]
- Sumalan, A.L.; Popescu, D.A.N.; Ichim, L.O.R.E.T.T.A. Flooded areas detection based on LBP from UAV images. In Recent Advances on Systems, Signals, Control, Communications and Computers; WSEAS Press: Budapest, Hungary, 2015; pp. 186–191. [Google Scholar]
- Carrio, A.; Sampedro, C.; Rodriguez-Ramos, A.; Campoy, P. A review of deep learning methods and applications for unmanned aerial vehicles. J. Sens. 2017, 2017, 1–13. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Disaster monitoring using unmanned aerial vehicles and deep learning. arXiv 2018, arXiv:1807.11805. [Google Scholar]
- Zeng, Y.; Huang, W.; Liu, M.; Zhang, H.; Zou, B. Fusion of satellite images in urban area: Assessing the quality of resulting images. In Proceedings of the 2010 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010. [Google Scholar]
- Zoka, M.; Psomiadis, E.; Dercas, N. The complementary use of optical and sar data in monitoring flood events and their effects. Proceedings 2018, 2, 644. [Google Scholar] [CrossRef]
- Chaouch, N.; Temimi, M.; Hagen, S.; Weishampel, J.; Medeiros, S.; Khanbilvardi, R. A synergetic use of satellite imagery from SAR and optical sensors to improve coastal flood mapping in the Gulf of Mexico. Hydrol. Process. 2012, 26, 1617–1628. [Google Scholar] [CrossRef]
- Senthilnath, J.; Rajendra, R.; Suresh, S.; Kulkarni, S.; Benediktsson, J.A. Hierarchical clustering approaches for flood assessment using multi-sensor satellite images. Int. J. Image Data Fusion 2019, 10, 28–44. [Google Scholar] [CrossRef]
- Khan, S.I.; Hong, Y.; Gourley, J.J.; Khattak, M.U.; De Groeve, T. Multi-sensor imaging and space-ground cross-validation for 2010 flood along Indus River, Pakistan. Remote. Sens. 2014, 6, 2393–2407. [Google Scholar] [CrossRef]
- Xu, B.; Da Xu, L.; Cai, H.; Xie, C.; Hu, J.; Bu, F. Ubiquitous Data Accessing Method in IoT-Based Information System for Emergency Medical Services. IEEE Trans. Ind. Inform. 2014, 10, 1578–1586. [Google Scholar]
- Balkaya, C.; Casciati, F.; Casciati, S.; Faravelli, L.; Vece, M. Real-time identification of disaster areas by an open-access vision-based tool. Adv. Eng. Softw. 2015, 88, 83–90. [Google Scholar] [CrossRef]
- Langhammer, J.; Bernsteinová, J.; Miřijovský, J. Building a high-precision 2D hydrodynamic flood model using UAV photogrammetry and sensor network monitoring. Water 2017, 9, 861. [Google Scholar] [CrossRef]
- Zhu, Z.J.; Jiang, A.Z.; Lai, J.; Xiang, Y.; Baird, B.; McBean, E. Towards efficient use of an unmanned aerial vehicle for urban flood monitoring. J. Water Manag. Model. 2017. [Google Scholar] [CrossRef]
- Liu, C.C.; Chen, P.L.; Matsuo, T.; Chen, C.Y. Rapidly responding to landslides and debris flow events using a low-cost unmanned aerial vehicle. J. Appl. Remote. Sens. 2015, 9, 96016. [Google Scholar] [CrossRef]
- Kao, H.M.; Ren, H.; Lee, C.S.; Chen, Y.L.; Lin, Y.S.; Su, Y. Monitoring debris flows using spatial filtering and entropy determination approaches. Terr. Atmos. Ocean. Sci. 2013, 24, 773. [Google Scholar] [CrossRef]
- Langhammer, J.; Vacková, T. Detection and mapping of the geomorphic effects of flooding using UAV photogrammetry. Pure Appl. Geophys. 2018, 175, 83–105. [Google Scholar] [CrossRef]
- Goderniaux, P.; Brouyère, S.; Fowler, H.J.; Blenkinsop, S.; Therrien, R.; Orban, P.; Dassargues, A. Large scale surface–subsurface hydrological model to assess climate change impacts on groundwater reserves. J. Hydrol. 2009, 373, 122–138. [Google Scholar] [CrossRef]
- Yacoob, Y.; Davis, L.S. Recognizing human facial expressions from long image sequences using optical flow. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 636–642. [Google Scholar] [CrossRef]
- Harjoko, A.; Awaludin, L.; Hujja, R.M. The flow rate of debris estimation on the Sabo Dam area with video processing. In Proceedings of the 2017 International Conference on Signals and Systems (ICSigSys), Sanur, Indonesia, 16–18 May 2017. [Google Scholar]
- Al-Mamari, M.M.; Kantoush, S.A.; Kobayashi, S.; Sumi, T.; Saber, M. Real-Time Measurement of Flash-Flood in a Wadi Area by LSPIV and STIV. Hydrology 2019, 6, 27. [Google Scholar] [CrossRef]
- Fujita, I. Discharge measurements of snowmelt flood by Space-Time Image Velocimetry during the night using far-infrared camera. Water 2017, 9, 269. [Google Scholar] [CrossRef]
- Sullivan, J.L.; McFaden, S.; Engel, T. Using Remote Data Collection to Identify Bridges and Culverts Susceptible to Blockage during Flooding Events; University of Vermont, Transportation Research Center: Burlington, VT, USA, 2016. [Google Scholar]
- Ahmad, S.; Ahmad, K.; Ahmad, N.; Conci, N. Convolutional neural networks for disaster images retrieval. In Proceedings of the MediaEval, Dublin, Ireland, 13–15 September 2017. [Google Scholar]
- Dao, M.S.; Pham, Q.N.M.; Nguyen, D.; Tien, D. A domain-based late-fusion for disaster image retrieval from social media. In Proceedings of the MediaEval 2017 Multimedia Benchmark Workshop, Dublin, Ireland, 13–15 September 2017. [Google Scholar]
- Zhao, Z.; Larson, M. Retrieving Social Flooding Images Based on Multimodal Information. 2017. Available online: http://ceur-ws.org/Vol-1984/Mediaeval_2017_paper_40.pdf (accessed on 16 November 2019).
- Flood Detection Using Social Media Data and Spectral Regression Based Kernel Discriminant Analysis. Available online: http://slim-sig.irisa.fr/me17/Mediaeval_2017_paper_43.pdf (accessed on 11 November 2019).
- BMC@ MediaEval 2017 Multimedia Satellite Task via Regression Random Forest. Available online: http://slim-sig.irisa.fr/me17/Mediaeval_2017_paper_46.pdf (accessed on 11 November 2019).
- CNN and GAN Based Satellite and Social Media Data Fusion for Disaster Detection. Available online: https://www.researchgate.net/profile/Michael_Riegler/publication/319774098_CNN_and_GAN_Based_Satellite_and_Social_Media_Data_Fusion_for_Disaster_Detection/links/59bc1161a6fdcca8e5624836/CNN-and-GAN-Based-Satellite-and-Social-Media-Data-Fusion-for-Disaster-Detection.pdf (accessed on 11 November 2019).
- Visual and Textual Analysis of Social Media and Satellite Images for Flood Detection@ Multimedia Satellite Task MediaEval 2017. Available online: http://slim-sig.irisa.fr/me17/Mediaeval_2017_paper_31.pdf (accessed on 11 November 2019).
- Detection of Flooding Events in Social Multimedia and Satellite Imagery Using Deep Neural Networks. Available online: https://pdfs.semanticscholar.org/3118/eed6edfc0ecabf14968906832510e4898e7f.pdf (accessed on 11 November 2019).
- Feng, Y.; Sester, M. Extraction of pluvial flood relevant volunteered geographic information (VGI) by deep learning from user generated texts and photos. ISPRS Int. J. Geo-Inf. 2018, 7, 39. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; Smith, K.B.; Brunzell, S.M.; Kasischke, E.S.; Romanowicz, E.A.; Richardson, C.J. Remote monitoring of regional inundation patterns and hydroperiod in the Greater Everglades using Synthetic Aperture Radar. Wetlands 2005, 25, 176–191. [Google Scholar] [CrossRef]
- Opaluch, J.J.; Anthony, A.; Atwood, J.; August, P.; Byron, C.; Cobb, S.; Foster, C.; Fry, C.; Hagos, K.; Heffner, L.; et al. Coastal lagoons and climate change: Ecological and social ramifications in the US Atlantic and Gulf coast ecosystems. Ecol. Soc. 2009, 14, 8. [Google Scholar]
- Hanslow, D.J.; Davis, G.A.; You, B.Z.; Zastawny, J. Berm height at coastal lagoon entrances in NSW. Available online: https://www.researchgate.net/profile/David_Hanslow/publication/258918589_BERM_HEIGHT_AT_COASTAL_LAGOON_ENTRANCES_IN_NSW/links/0c96052966e61cc447000000/BERM-HEIGHT-AT-COASTAL-LAGOON-ENTRANCES-IN-NSW.pdf (accessed on 16 November 2019).



{kind=link}
{kind=link}
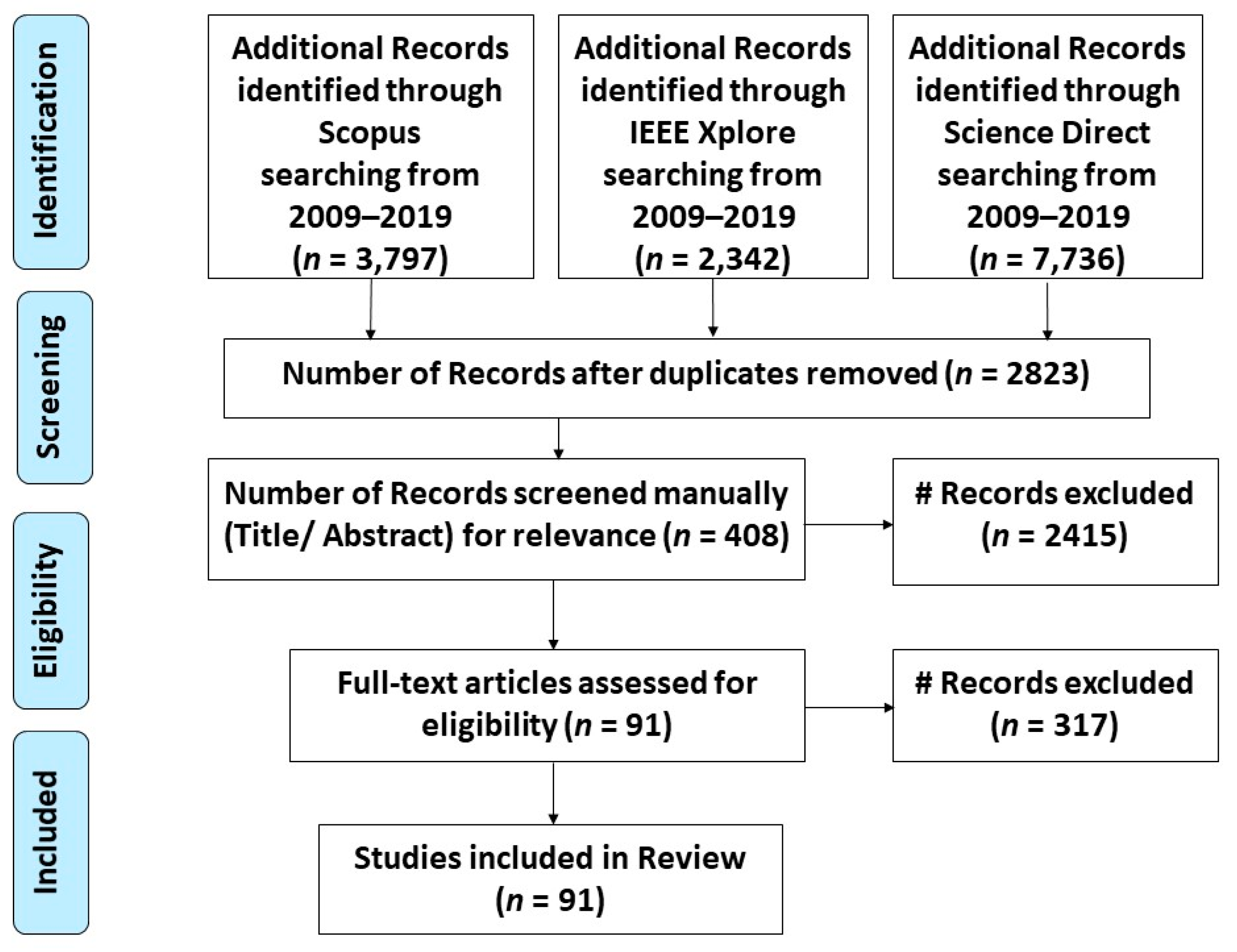
| Keyword | Scopus | IEEE Xplore | Science Direct |
|---|---|---|---|
| “remote sensing AND lagoon” | 229 | 4 | 525 |
| “remote sensing AND flood” | 3022 | 871 | 452 |
| “IoT AND flood” | 48 | 58 | 921 |
| “UAV AND flood” | 109 | 36 | 521 |
| “drones AND flood” | 19 | 8 | 689 |
| “computer vision AND flood” | 40 | 58 | 792 |
| “computer vision AND coastal” | 30 | 52 | 1076 |
| “wireless sensor network AND flood” | 300 | 1255 | 2760 |
| Total | 3797 | 2342 | 7736 |
| Method | Average Error (m) | Variance of Error (m2) |
|---|---|---|
| Difference Technique | 0.046 | 0.003 |
| Dictionary Learning | 0.023 | 2.636 × 10−4 |
| Convolutional Neural Network (CNN) | 0.009 | 4.476 × 10−5 |
| Purpose | Article | Proposed Method | Focus |
|---|---|---|---|
| A (sensors available to forecast flood) | [30] | Pressure transducer and radar sensor | Discussed the pros and cons of the pressure transducer and rangefinder sensors in estimating water level |
| [34] | Optical and radar sensors | Comparison between optical and radar sensor for acquiring both time series and visual information | |
| [35] | Multilayer Perceptron (MLP) algorithm, along with soil moisture and CO2 sensors. | Forecasting of the flash flood by utilizing soil moisture and CO2 sensors | |
| [46] | Unmanned Aerial Vehicle (UAV) deployment of disposable sensors | One-time deployment of sensors to study the flow of river and forecast flooding | |
| [48,49,50] | Webserver for visualization of data | Forecasting of the flood by via remote sensing | |
| [64] | Internet of Things (IoT) protocols and commercial sensors | IoT for disaster management | |
| B (IoT-based sensors and early warning system) | [36] | NodeMCU and ultrasonic sensor along with Blynk platform | Monitoring of water level in real-time via cell phone application powered by Blynk |
| [37] | EnOcean and ultrasonic sensors | A cost-effective approach to deploy water level sensors | |
| [38] | Rangefinder, humidity, CO2 and Global Positioning System (GPS) sensors | Early warning system based on off-the-shelf sensors | |
| [39] | Precipitation and ultrasonic sensor along with utilizing network parameters to reduce power consumption | Power-efficient approach in WSN | |
| [41,42] | SIFT algorithm along with the camera, ZigBee and Global System For Mobile (GSM) | Early warning system based on ZigBee and GSM | |
| [43] | Mamdani fuzzy logic, ZigBee and water level sensor | Forecast flooding based on Fuzzy logic | |
| [44] | Piezoelectric pressure sensors, Altera’s Cyclone board and ZigBee | Early warning system based on ZigBee | |
| [45] | NSGS-II algorithm | Best spot for the WSN to get the best coverage of the site | |
| [47] | Water level sensor, Analog to Digital Converter (ADC), 8051 microprocessor and ZigBee to monitor the water level | Monitor and control of distribution substation in low-lying areas, and issue early warnings in case of water overflow | |
| [51] | Flow, water level and ZigBee | Early warning system based on real-time monitoring of dams | |
| [52,53] | Low-power wireless sensor network (WSN) | Early warning system based on WSN | |
| [54] | Water level sensor, Global System For Mobile (GSM) and renewable power source | Water level monitoring over cellular Communications | |
| [65] | Wireless sensor network (WSN) | Early warning system based on WSN | |
| [66] | IoT Device, GSM | Sensor for River water level monitoring over cellular communications | |
| C (WSN and machine learning) | [56] | MLP to analyse time series data from ultrasonic sensor | Early warning system by utilizing the machine-learning technique |
| [57] | AI-based multi-modal network system consists of rangefinder, pressure, temperature and gas sensors | Notify and issue warnings to locals in case of flooding | |
| [58] | Artificial Neural Network (ANN) along with soil moisture, rainfall and water level sensors | Early warning system based on WSN and ANN | |
| [59] | WSN consists of a rangefinder, water height elevation, rainfall and temperature sensors | Early warning system based on WSN | |
| [60] | Artificial Neural Network (ANN) along with ultrasonic and temperature sensor to validate data coming from sensors | Reduce fake alarms by monitoring temperature variations between the ultrasonic sensor and ground surface | |
| [67] | Water level sensor | Early warning system to reduce flood risk | |
| D (validation of data from sensors) | [61] | Intelligent sensors and 3D mapping for segmentation | Reducing fake alarms by adding visual information with a water level sensor |
| [62] | WSN and Geographical Information Systems (GIS) | Validation of data by comparing with the flood events reported by citizens | |
| [63] | Kalman filter and WSN | Validation of data coming from sensors | |
| [68] | WSN along with multi-agent system | Classification between valid and invalid data received from the sensor |
| Model | Precision | Recall | Overall Measure (F1) |
|---|---|---|---|
| MLP | 0.61 | 0.67 | 0.64 |
| DeepWaterMap-1 | 0.81 | 0.94 | 0.87 |
| DeepWaterMap-3 | 0.91 | 0.88 | 0.90 |
| DeepWaterMap-5 | 0.92 | 0.87 | 0.90 |
| FCN | FCN-16 | Advantages of FCN-16 Over FCNs |
|---|---|---|
| Kernel size = 7 × 7 | Kernel size = 3 × 3 | The smaller kernel size of the FCN-16 can be trained on fewer training samples in a shorter time. |
| L2 regular function | Dropout layers | Inclusion of dropout layers in the FCN-16 can prevent the model from overfitting. |
| FCNs utilise skip connections to fuse shallow layers, localise features and use global features. FCNs extract the features from a shallow layer and concatenate them with output of deep layers in the network | The structure of the fusion layer is changed, as for FCN-16, the input to the convolution layer is the addition of both deep layers and shallow layers | The advantage of using FCN-16 is that the model can extract new features using both global and local features. |
| Class | RGB | RGB + Textural Features | RGB + Textural Features + Terrain Ruggedness Index (TRI) | RGB + Textural Features + TRI + DEM |
|---|---|---|---|---|
| Fresh sand accumulation | 93.9 | 95.1 | 95.4 | 95.9 |
| Fresh gravel accumulation | 80 | 83.7 | 86.7 | 95.7 |
| Old gravel accumulation | 75.5 | 76 | 76 | 93.2 |
| Bank erosion | 61.7 | 71.1 | 98.1 | 98.3 |
| Purpose | Article | Type of Information | Proposed Method | Addressed Requirements | ||
|---|---|---|---|---|---|---|
| + -> Average ++ -> Good +++ -> State of the Art | ||||||
| Accuracy | Generalization | Scope of the Study | ||||
| A (water level estimation/early warning system) | [18] | Static Ground Camera | Difference Method | + | + | Real-world, tested on one river |
| [19] | Static Ground Camera | Logistic Regression and WSN | ++ | +++ | Real-world, tested on thirteen rivers | |
| [20] | Static Ground Camera | CNN Architecture | ++ | ++ | Real-world, tested on six scenes | |
| [22] | Static Ground Camera | Image Texture features | + | + | Real-world, tested on one river | |
| [23] | Static Ground Camera | Accumulated Histogram and Bandpass Filter | + | Not Addressed | In-lab experiment | |
| [24] | Static Ground Camera | Edge Detector and Far Infrared (FIR) filter | + | Not Addressed | In-lab experiment | |
| [25] | Static Ground Near Infrared (NIR) Camera | OSF-based adaptive thresholding | +++ | ++ | Real-world, tested on one river | |
| [27] | UAV Mounted Camera | Canny Filter thresholding | ++ | + | Real-world, tested on one DAM | |
| [28] | Static Ground IP Cameras | Image Texture-based segmentation | ++ | ++ | Real world, tested on one river | |
| B (surface water velocity for hydrodynamic modelling) | [119] | Static Ground Camera | Pyramidal Lucas-Kanade optical flow method | ++ | ++ | Real-world, tested on one river |
| [120] | Static Ground Camera | LSPIV and STIV techniques | +++ | ++ | Real world, tested on one river | |
| [121] | Static Ground FIR Camera | STIV technique | +++ | ++ | Real world, tested on one river | |
| Purpose | Article | Type of Information | Proposed Method | Addressed Requirements | ||
|---|---|---|---|---|---|---|
| + -> Average ++ -> Good +++ -> State of the Art | ||||||
| Accuracy | Generalization | Scope of Study | ||||
| C (flood-related data collection) | [70] | Static Ground Camera | Tiramisu image segmentation algorithm along with database | ++ | +++ | Real-world, multiple locations |
| [71,72] | Social Media | Flood image segmentation dataset | Not Addressed | Not Addressed | Real-world, multiple locations | |
| [73] | Spaceborne | ResNet-50 along with flood image database | +++ | +++ | Real world, multiple locations | |
| [76] | UAV Mounted Camera | Digital Terrain elevation (DTE) dataset Collection | Not Addressed | Not Addressed | Real-world, multiple locations | |
| [77] | UAV Mounted Camera | Fuzzy C-means model to cluster images and database collection | ++ | ++ | Real-world, multiple locations | |
| [122] | UAV Mounted Camera | Stereo images collection for floods | Not Addressed | Not Addressed | Real-world, multiple locations | |
| D (flood risk management) | [89] | UAV Mounted Camera | Aerial images inspection with Geographical Information System (GIS) data points | ++ | ++ | Real-world, tested on coastal environment |
| [90] | UAV Mounted Camera | Digital Elevation Model (DEM) data collection via UAVs | ++ | ++ | Real-world, tested on one site but can expand out to other sites | |
| E (debris flow detection) | [100] | UAV Mounted Camera | Fusion of random forest and texture analysis | ++ | ++ | Real-world, multiple locations |
| [115] | Static Ground Camera | Spatial filtering and luminance / chrominance (YUV) transforms | ++ | + | Real-world, tested on one site | |
| [116] | UAV panchromatic camera | Texture analysis and DEM | ++ | ++ | Real-world, tested on one site | |
| Purpose | Article | Type of Information | Proposed Method | Addressed Requirements | ||
|---|---|---|---|---|---|---|
| + -> Average ++ -> Good +++ -> State of the Art | ||||||
| Accuracy | Generalization | Scope of the Study | ||||
| F (flood detection and inundation mapping) | [75] | Spaceborne | Near real-time monitoring by triggering TerraSAR-X | ++ | +++ | Real-world, multiple locations |
| [82] | Spaceborne | Fusion of MMI with DSM | ++ | ++ | Real world, multiple locations | |
| [83] | Spaceborne | Image retrieval and classification software based on CNN | +++ | +++ | Real world, multiple locations | |
| [85] | Spaceborne | Modest adaboost and Spatiotemporal Context | ++ | ++ | Real world, multiple locations | |
| [86] | Spaceborne | Gaussian kernels and Support Vector Machine (SVM) | ++ | +++ | Real world, multiple locations | |
| [87] | UAV | Optimized route planning for UAV | + | + | Real-world, UAVs path planning for flood monitoring | |
| [88] | UAV Mounted Camera | Texture analysis and fractal technique | ++ | + | Real-world, tested on big dataset | |
| [92] | Spaceborne | Convolutional Neural Network (CNN) architecture | ++ | ++ | Real world, multiple locations | |
| [93] | Spaceborne | FCN-16 CNN | ++ | ++ | Real world, Multiple locations | |
| [96] | Static Ground Camera | GrowCut method and Cellular automata (CA) algorithm | ++ | + | Real-world, tested on one river | |
| [97] | Static Ground Camera | Mean-shift and region growing | + | + | Real-world, tested on one river | |
| [98] | Static Ground Camera | SIFT algorithm | + | Not Addressed | In-lab experiment | |
| [101] | UAV Mounted Camera | Texture feature analysis | + | Not Addressed | Real-world, tested on ten images | |
| [102] | UAV Mounted Camera | Accumulated histogram and clustering images into a group | + | + | Real-world, multiple locations | |
| [104] | UAV Mounted Camera | VGG–CNN with a custom dense layer | ++ | + | Real-world, CNN trained on 444 images and tested on 100 images | |
| [106] | Spaceborne | Fusion of radar SAR and optical data | ++ | ++ | Real-world, Multiple locations | |
| [107] | Spaceborne | Fusion of Landsat images with DEM | ++ | ++ | Real-world, multiple locations | |
| [108] | Spaceborne | Hierarchical clustering approach | + | ++ | Real-world, multiple locations | |
| [109] | Spaceborne | Fusion of water-level sensor and satellites images | + | + | Real-world, tested on one site | |
| [111] | Spaceborne | Fusion of static ground cameras and satellite images | ++ | ++ | Real-world, multiple locations | |
| [112] | UAV and Ultrasonic sensor | Fusion of ultrasonic and DEM data collected from UAV to make a 3D model | ++ | ++ | Real-world, tested on one site but can expand out to other sites | |
| [113] | UAV Mounted Camera | Fusion of GIS and aerial photography | ++ | ++ | Real-world, tested in urban environment | |
| [123] | Social Media | Pre-trained CNN on ImageNet with the addition of meta-data analysis | ++ | ++ | Real-world, tested on real images posted online. | |
| [124,125,126,127,128,129,130] | Social Media | Fusion of contextual information with Image | ++ | + | Real-world, tested on real images posted online. | |
| [131] | Social Media | CNN architecture and meta-data analysis | ++ | + | Real-world, tested on real images posted online. | |
| [94] | UAV Mounted Camera | FCN-16 Architecture | + | ++ | Real world, tested on big dataset | |
| Main Challenges | Possible Solutions/Future Research |
|---|---|
| Computer vision algorithm dependent on physical measuring scale such as a staff gauge for measuring water level [20,25] | An image can be converted from a 2D to 3D domain [78] and then the water level can be measured by utilizing advanced computer vision techniques [69] |
| Traditional image processing techniques work in a controlled environment. Environmental variations require image processing techniques such as thresholding [27,96,97] and custom filters [18,22,23,24,41] | In order to generalize, the model computer vision technique, such as deep leaning, can be used to work in the dynamic environment [20,92,93,104,123] |
| Limited site coverage [35,59,67] | Data fusion and remote sensing techniques can be used to fuse data from different sources [106,107,108,109,110,111,112,113] |
| Lack of open-source data to train computer vision algorithms [20,86,92,93] | Data can be collected and opened to train the proposed model [70,71,72,73,76,77,122] |
| Limited generalizability of the proposed solutions [7,18,23,24,98,101,102,115] | Instead of using image processing techniques, advanced convolutional neural networks can be used [93] Generalizability of the model can be assessed by utilizing real-world data for the testing phase [72] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arshad, B.; Ogie, R.; Barthelemy, J.; Pradhan, B.; Verstaevel, N.; Perez, P. Computer Vision and IoT-Based Sensors in Flood Monitoring and Mapping: A Systematic Review. Sensors 2019, 19, 5012. https://doi.org/10.3390/s19225012
Arshad B, Ogie R, Barthelemy J, Pradhan B, Verstaevel N, Perez P. Computer Vision and IoT-Based Sensors in Flood Monitoring and Mapping: A Systematic Review. Sensors. 2019; 19(22):5012. https://doi.org/10.3390/s19225012
Chicago/Turabian StyleArshad, Bilal, Robert Ogie, Johan Barthelemy, Biswajeet Pradhan, Nicolas Verstaevel, and Pascal Perez. 2019. "Computer Vision and IoT-Based Sensors in Flood Monitoring and Mapping: A Systematic Review" Sensors 19, no. 22: 5012. https://doi.org/10.3390/s19225012
APA StyleArshad, B., Ogie, R., Barthelemy, J., Pradhan, B., Verstaevel, N., & Perez, P. (2019). Computer Vision and IoT-Based Sensors in Flood Monitoring and Mapping: A Systematic Review. Sensors, 19(22), 5012. https://doi.org/10.3390/s19225012