Multi-Sensor Fusion and Error Compensation of Attitude Measurement System for Shaft Boring Machine

Abstract
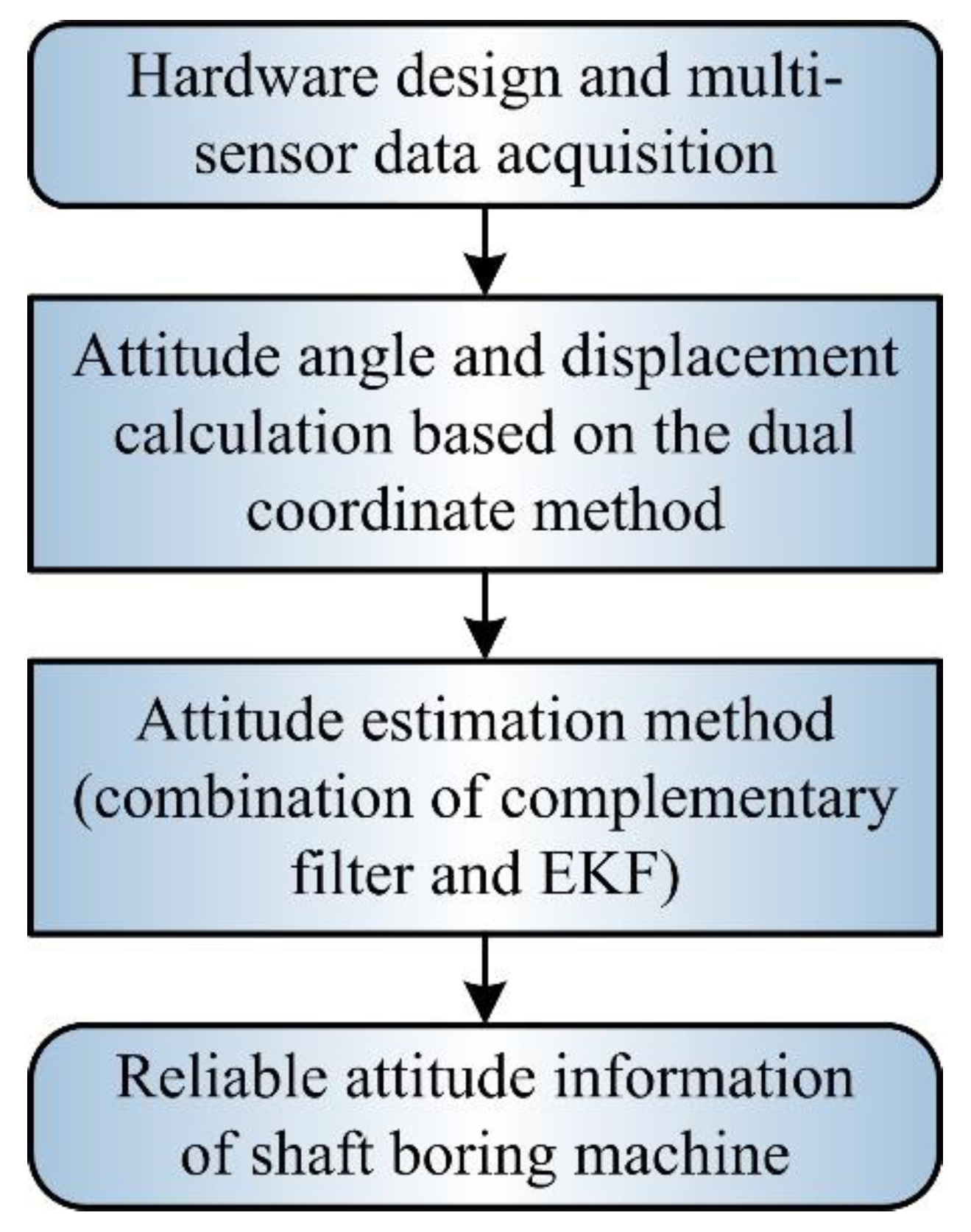
:1. Introduction
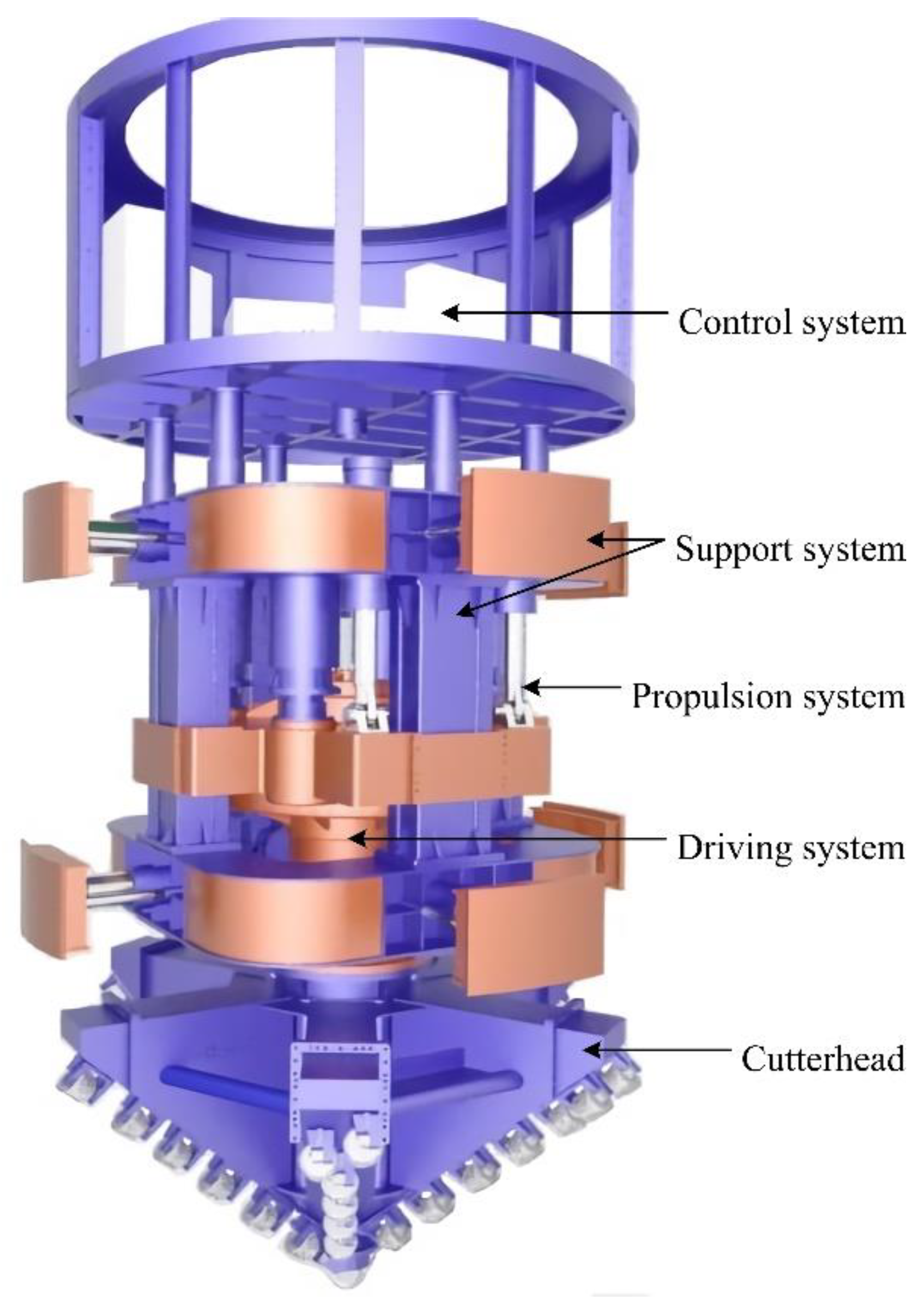
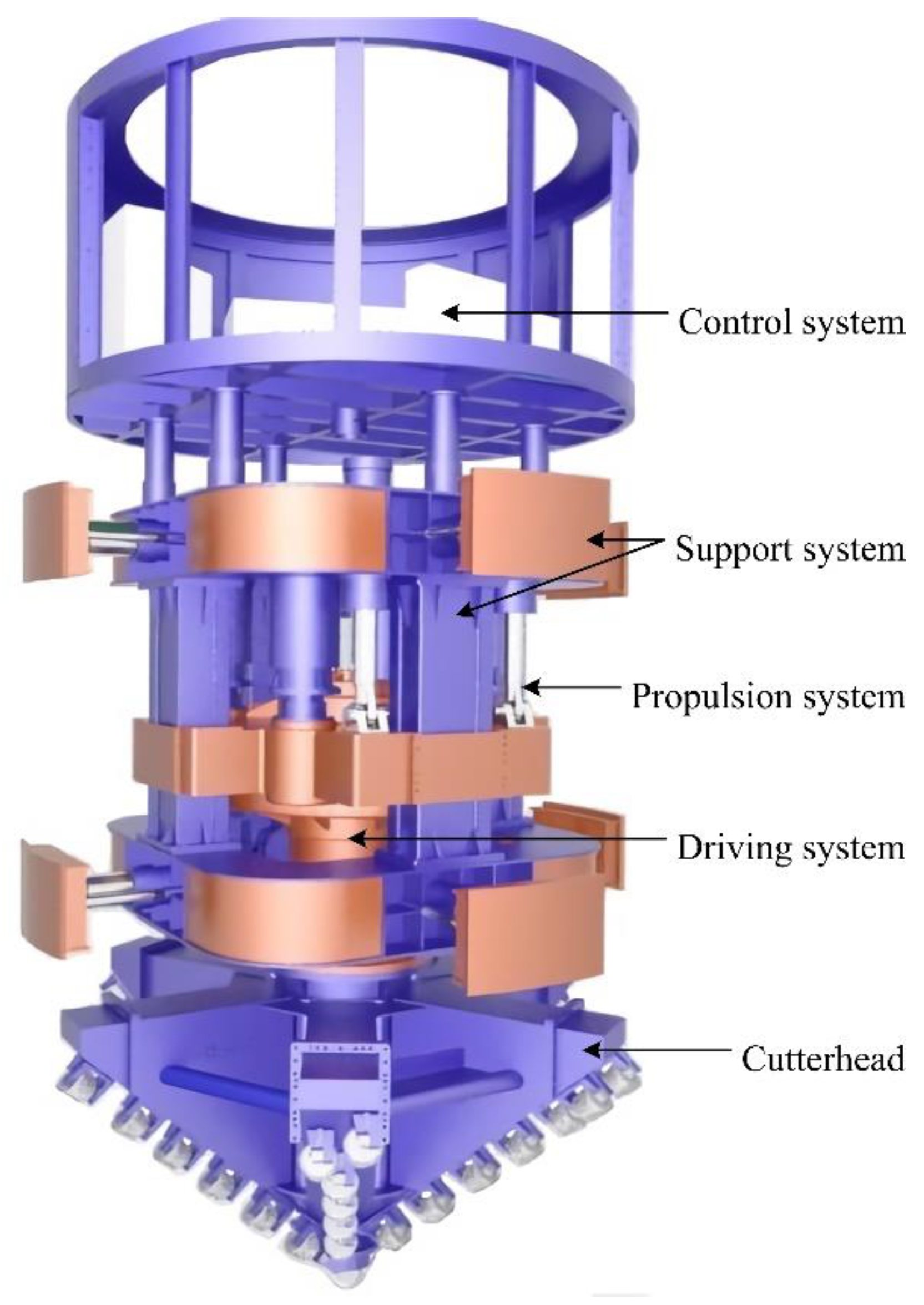
2. Hardware Design
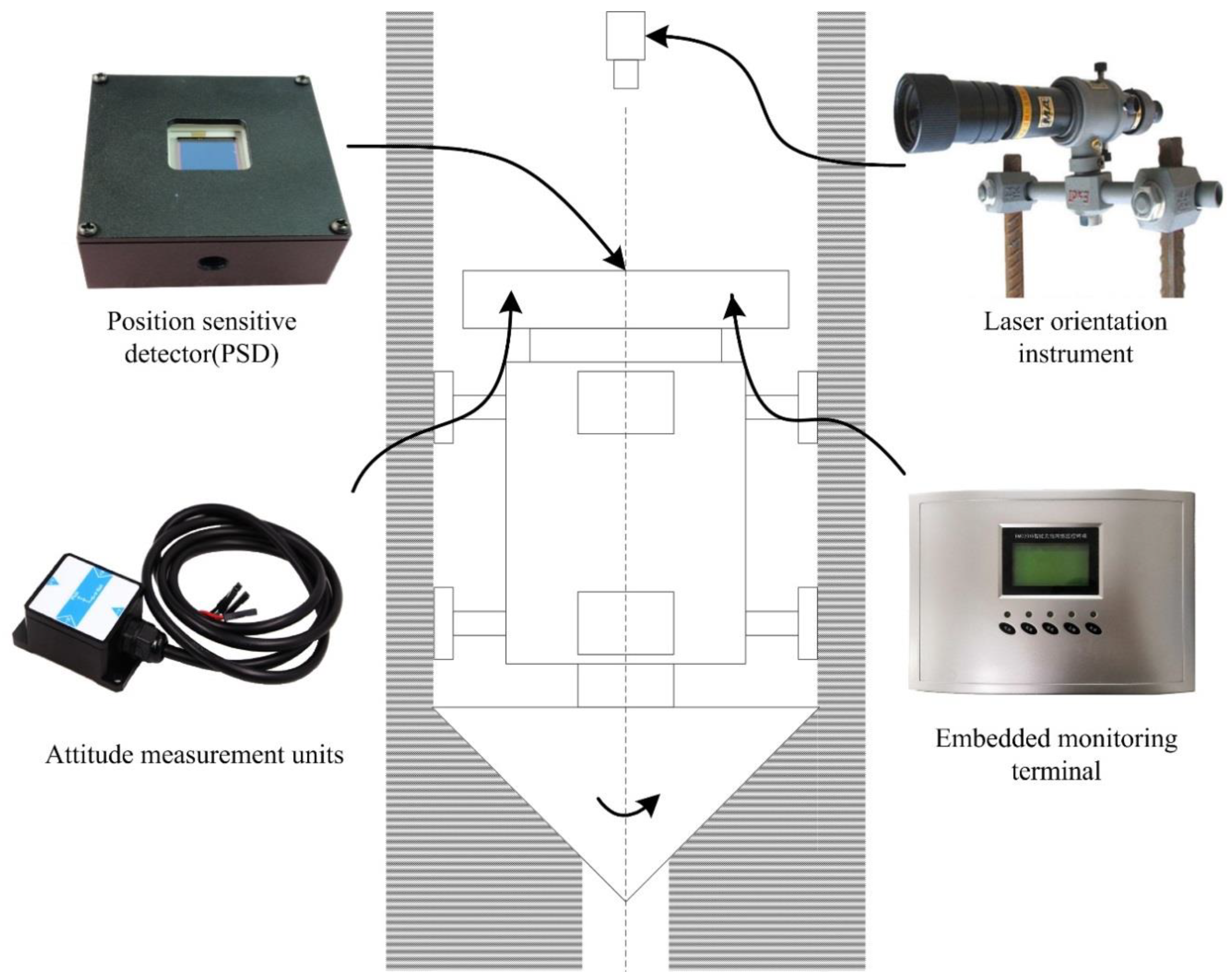
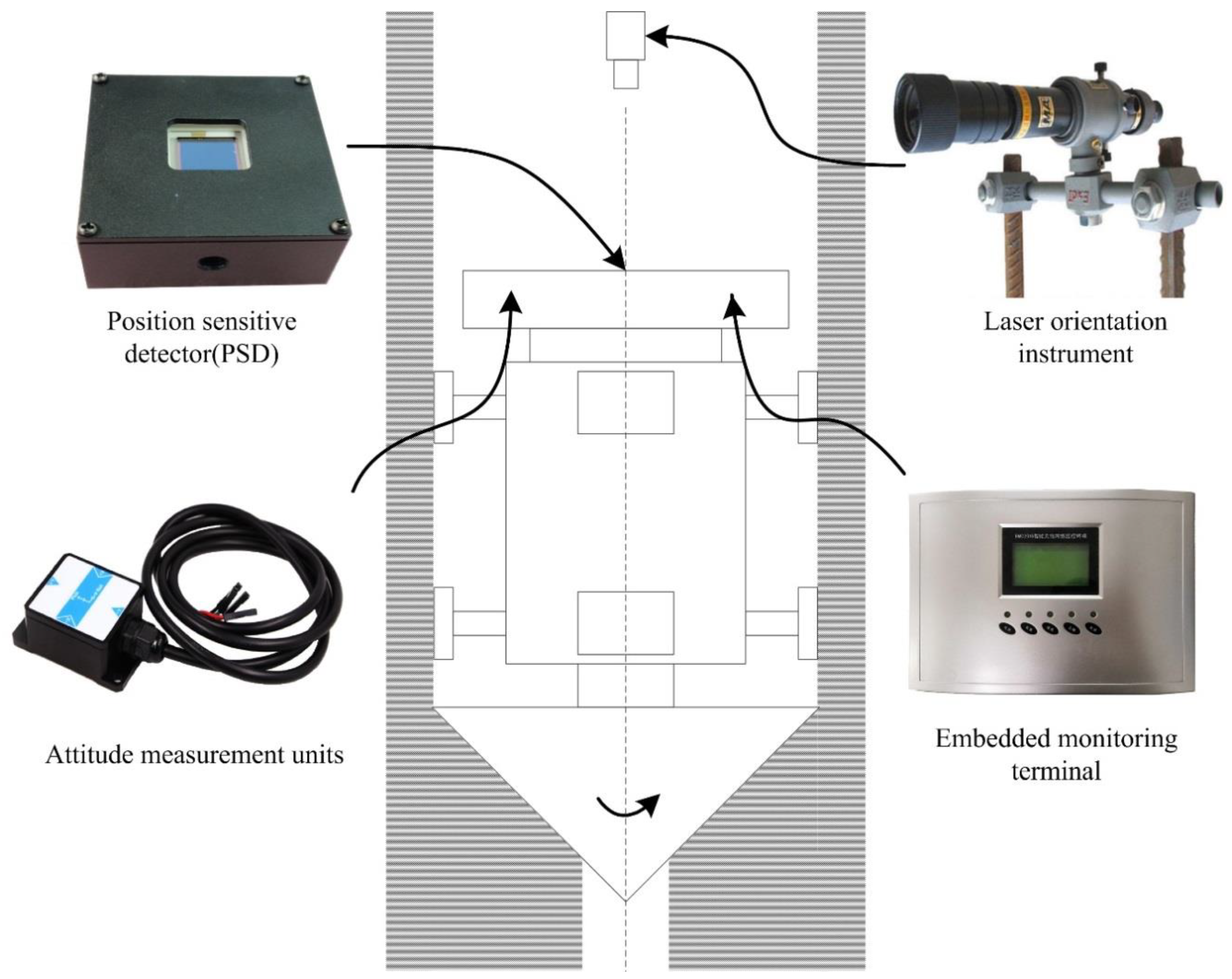
- Laser orientation instrument (YHJ800, Beijing Wokesida Technology Development Co., Ltd., Beijing, China), which is fixed vertically on the sidewall of the shaft. At the first time, it locates 5 m above the SBM and is used to point the direction of the drilling construction. The low power semiconductor laser is driven by a DC power supply to generate the laser beam; the laser power is more than 10 mW, and the effective range of laser is 800 m.
- Position sensitive detector (PSD6060, Shanghai Ouguang Electronic Technology Co., Ltd., Shanghai, China), which is installed on the top surface of the SBM, and it receives the laser signal to determine the horizontal relative displacement of the SBM. It is a two-dimension device, and the photosensitive surface range is 60 × 60 mm. Based on the photoelectric effect of the PIN photodiode, it can convert the light point position at the photosensitive surface to an electrical signal and has high position resolution and fast response speed. The output signal is only related to the light energy center position, independent of spot size and shape.
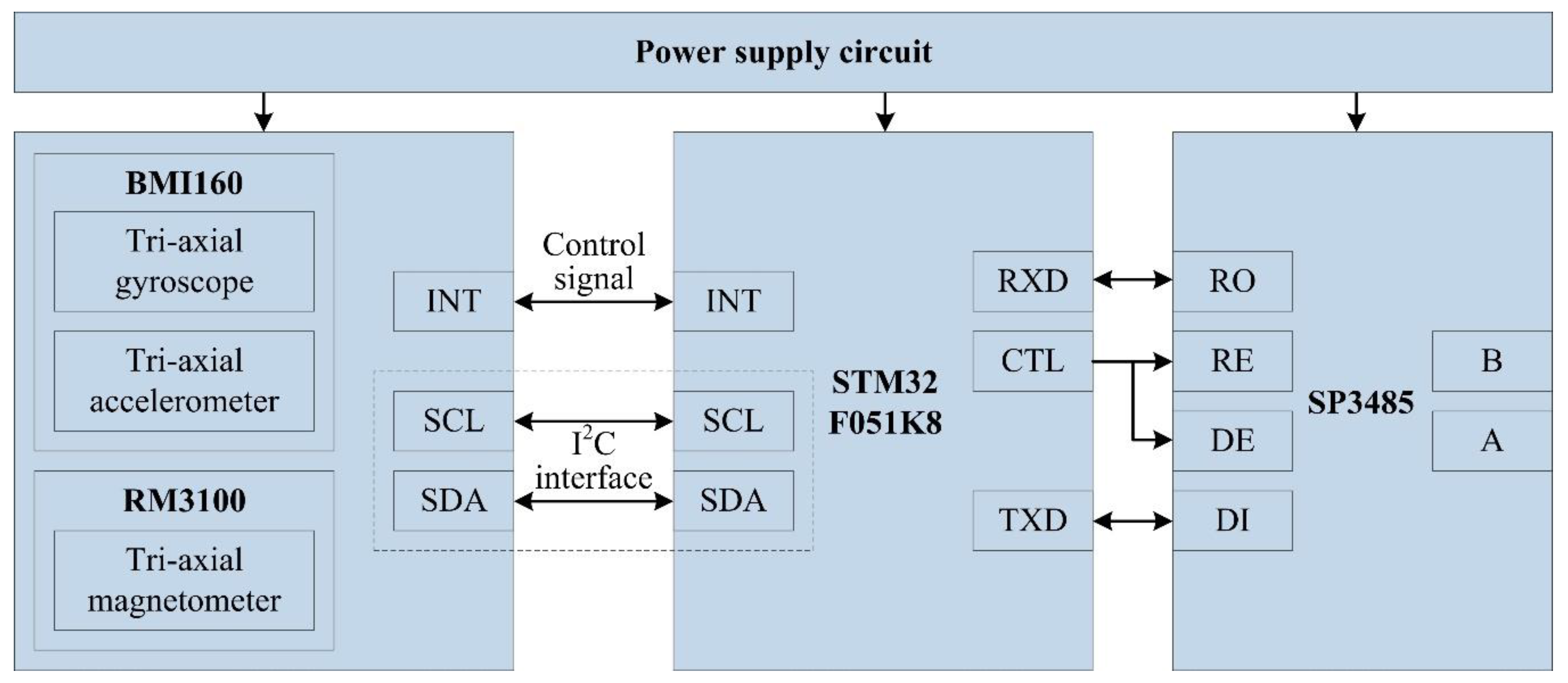
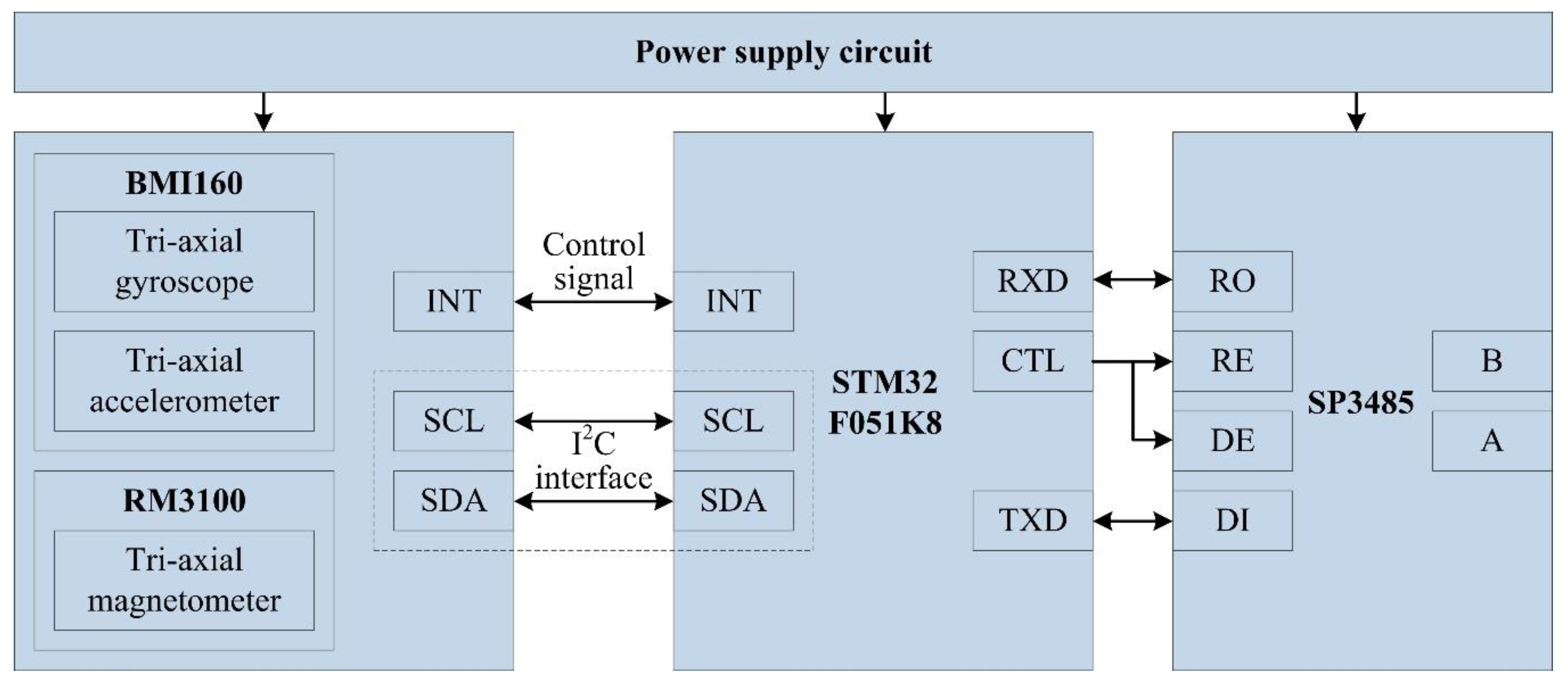
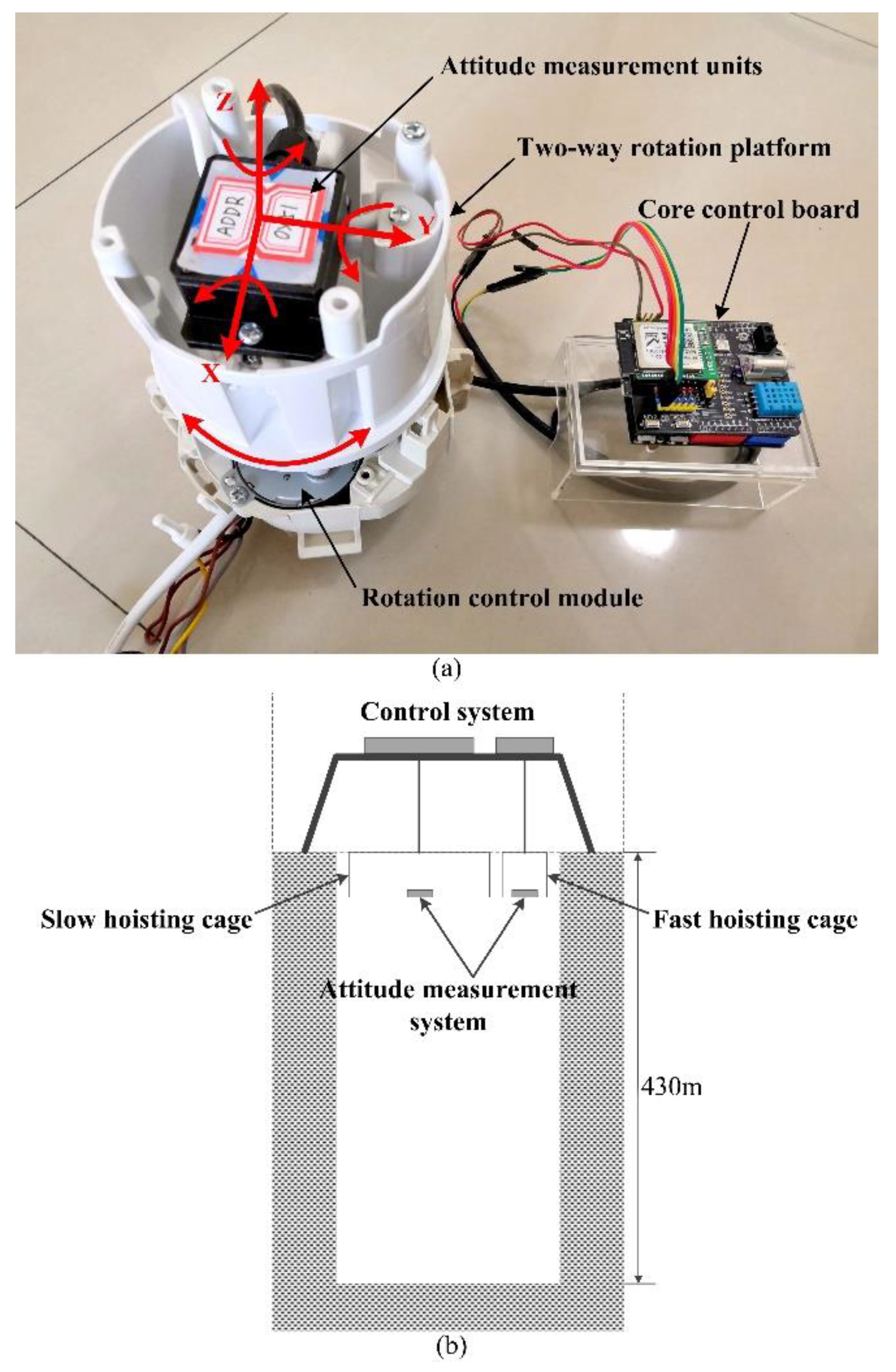
- Attitude measurement units are fastened at the measuring point on the top of SBM, each unit integrates an embedded controller and MEMS sensors (a gyroscope, accelerometer, magnetometer, etc.), and the units are applied for preliminary data fusion to obtain the deviation angle of the SBM. As shown in Figure 4, each unit is composed of a power supply circuit, microcontroller, gyroscope, accelerometer, magnetometer, and 485 communication module SP3485 (MaxLinear, INC., Carlsbad, CA, USA). The STM32F051K8 (STMicroelectronics, Geneva, Switzerland) is the core part, and its operating frequency is up to 48 MHz. The signals of BMI160 (Bosch Sensortec GmbH, Reutlingen, Germany, including a tri-axial gyroscope and a tri-axial accelerometer) and RM3100 (PNI Sensor Corporation, Santa Rosa, CA, USA, a tri-axial magnetometer) are collected by interface I2C (SCL and SDA). The interrupt control signal is issued by the custom interface INT of STM32F051K8, and the data transfer interrupt is triggered by the interface INT of BMI160. Meanwhile, the chip pin CTL is also the custom interface of STM32F051K8, and it can control the enable signal of sending and receiving for interface RE and DE of SP3485. Moreover, RXD is the data receiving interface and receives data from the interface RO, TXD is the data sending interface and sends data to the interface DI, and then attitude measurement units communicate with the embedded monitoring terminal through the 485 bus (interface A and B).
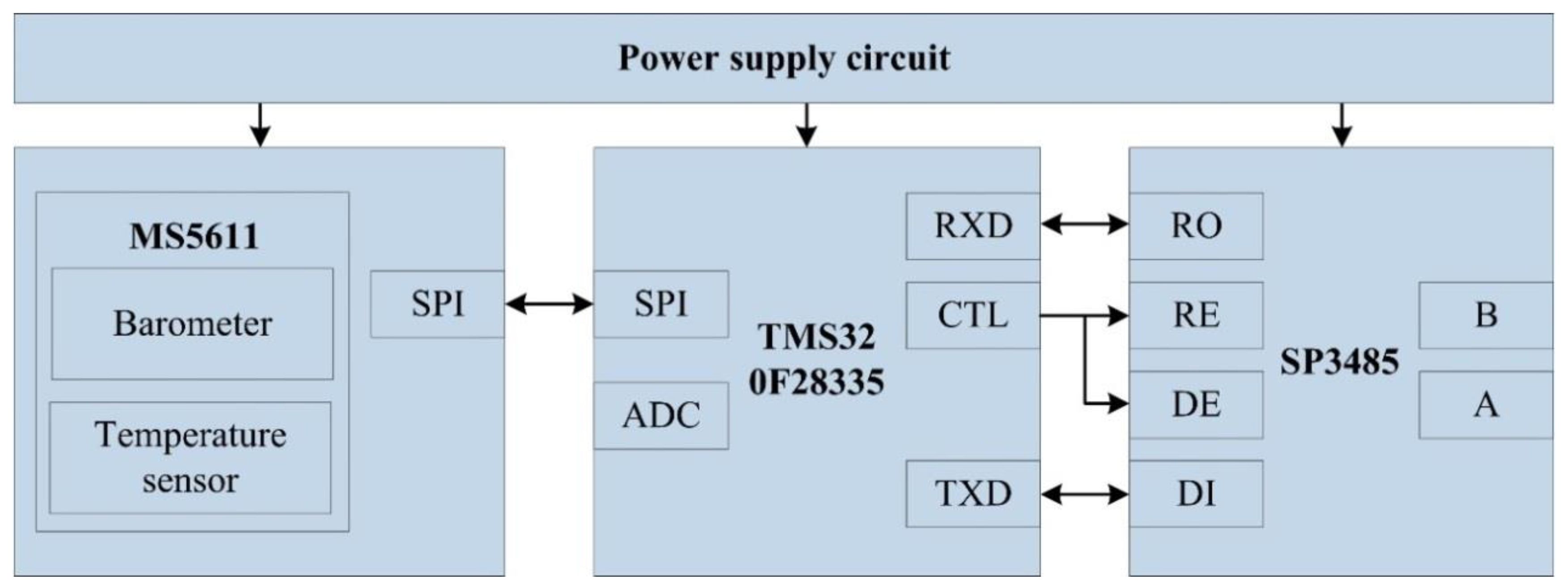
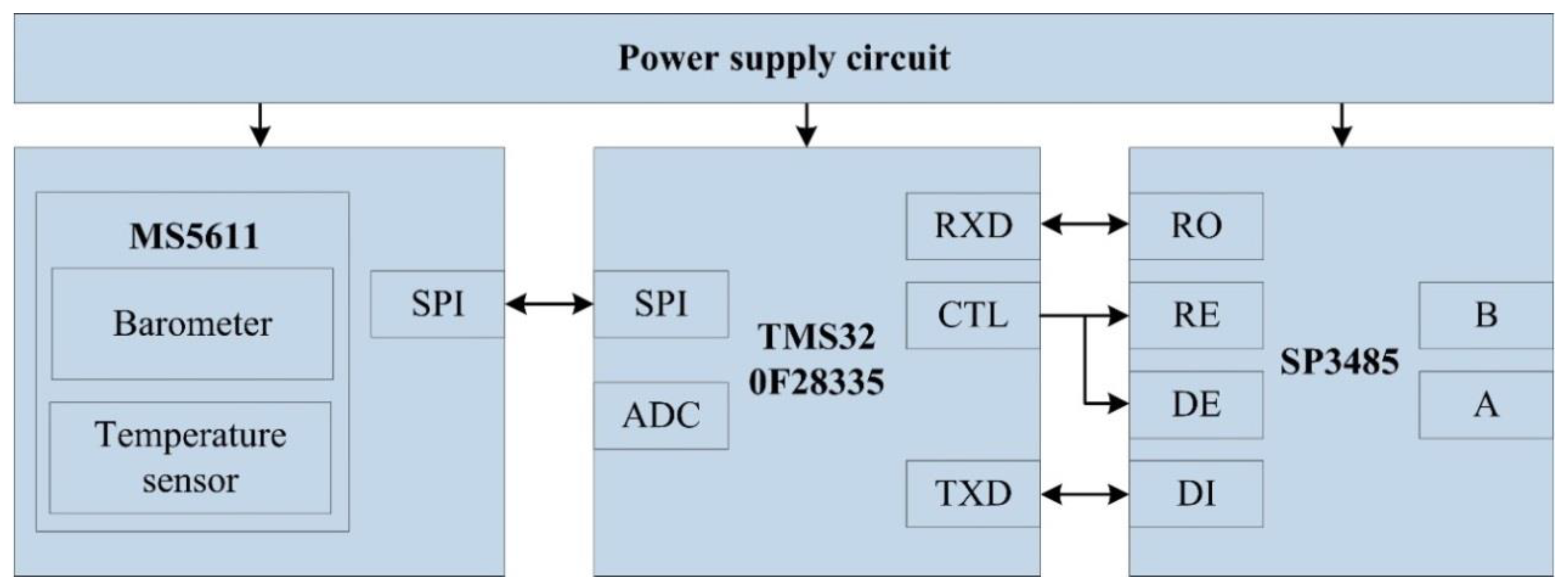
- The embedded monitoring terminal is on the top console of the SBM and collects information, such as displacement, air pressure, temperature, deviation angle, and then completes secondary data fusion and the attitude calculation. As shown in Figure 5, it includes a power supply circuit, microcontroller, air pressure sensor, 485 communication unit (SP3485), and so on. The core microcontroller is TMS320F28335 (Texas Instruments Incorporated, Dallas, TX, USA), and the operating frequency of the DSP (digital signal processor) controller is up to 150 MHz. TMS320F28335 receives the signal from MS5611 (Measurement Specialties, Inc., Hampton, VA, USA, including a barometer and a temperature sensor) with the interface SPI, and acquires the displacement value of the PSD by the interface ADC, the definition and function of 485 communication interface are similar to the attitude measurement unit. Meanwhile, the embedded monitoring terminal receives the data transmitted by attitude measurement units and carries out data interaction with attitude measurement units, the PLC (programmable logic controller), and the remote control center with the 485 bus (interface A and B).
3. Dual Coordinate Method
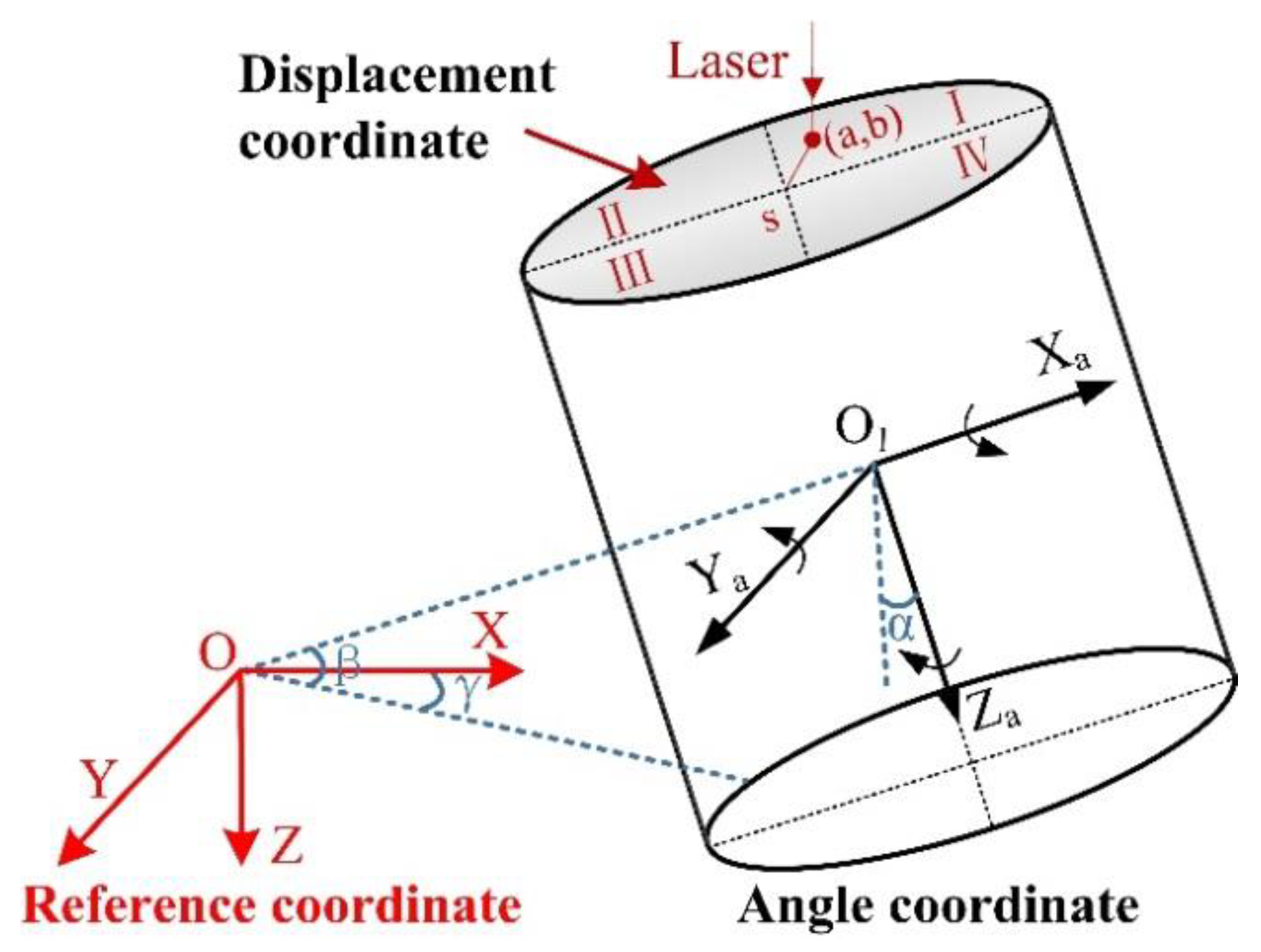
3.1. Angle Coordinate Analysis
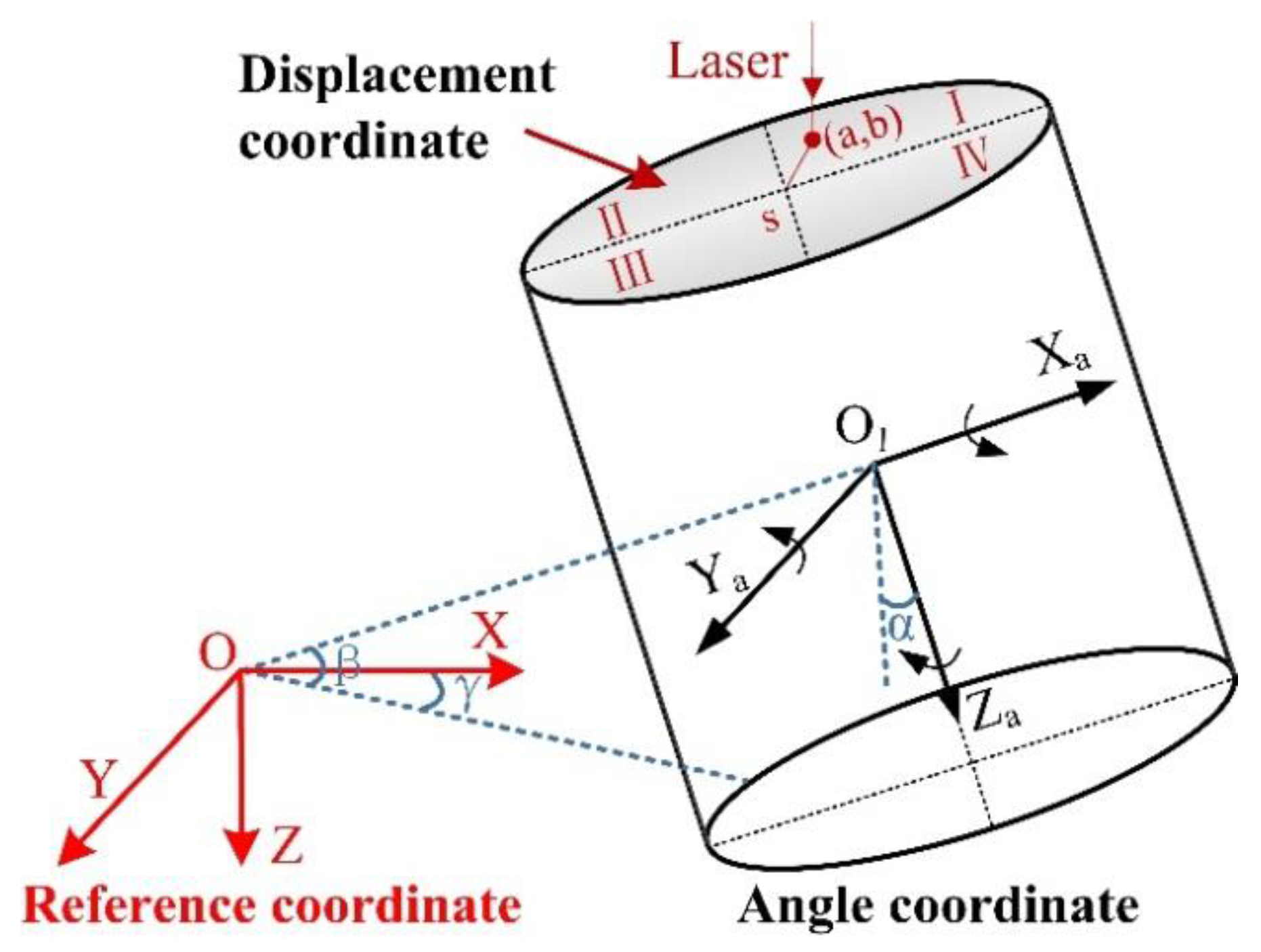
- Roll angle α: the angle between the Za axis and the plumb plane containing the Xa axis after the SBM rotates around the Xa axis. It is positive to the right and negative to the contrary, which shows the deflection degree around the Xa axis; the threshold range is [−15°, 15°].
- Pitch angle β: the angle between the Xa axis and the horizontal plane after the SBM rotates around the Ya axis. When the positive half of the Xa axis is above the horizontal plane, the pitch angle is positive, otherwise it is negative, which proves the deflection degree around the Ya axis; the threshold range is [−15°, 15°].
- Yaw angle γ: the angle between the projection of the Xa axis on the horizontal plane and the Xa axis of the reference frame after the SBM rotates around the Za axis. When the X axis rotates clockwise to the Xa axis projection, the yaw angle is positive, otherwise it is negative. It is 0° under normal conditions, non-zero indicates that the support system has failed or the SBM is passing through an abnormal geological area, which causes the SBM to rotate laterally along the shaft; thus, the operation must be stopped immediately.
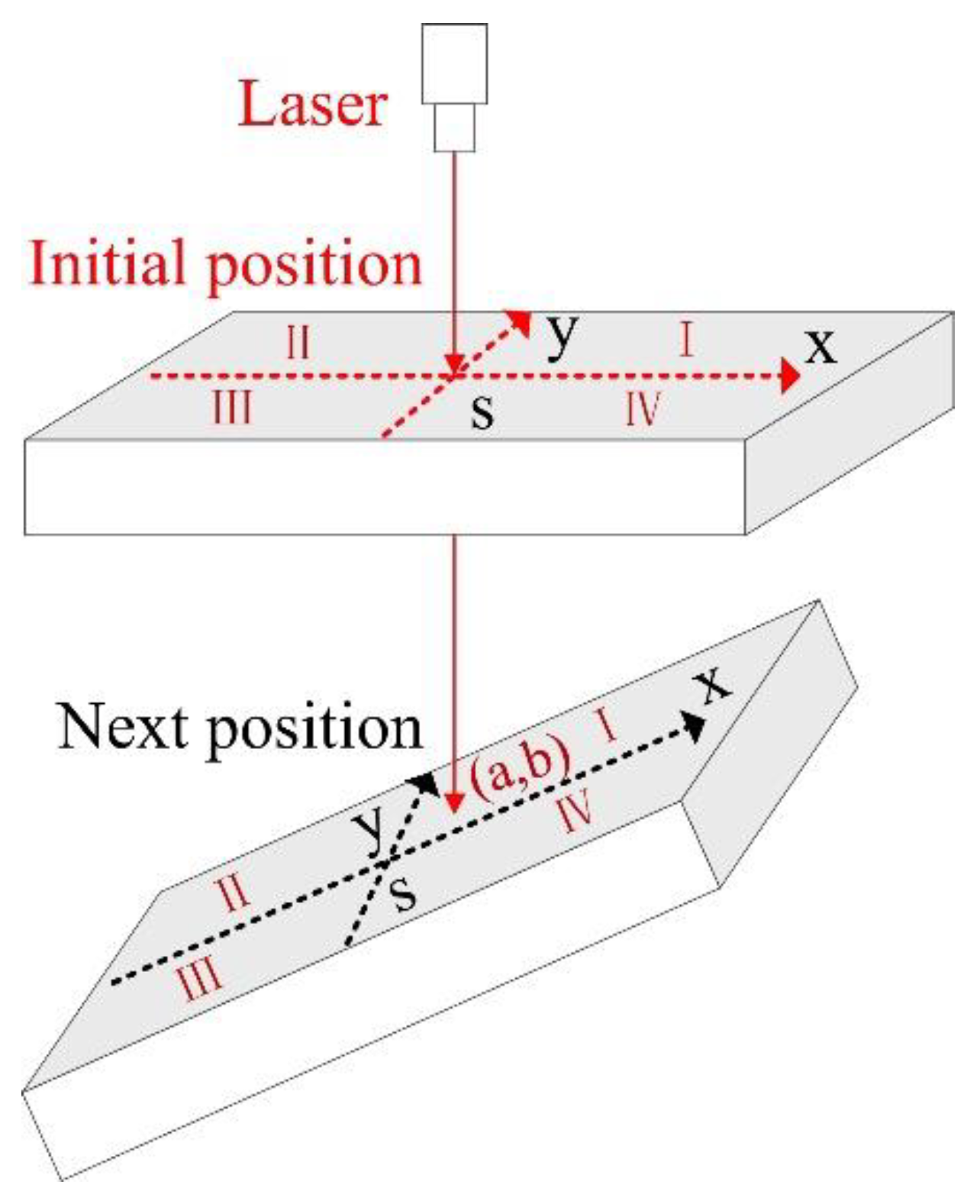
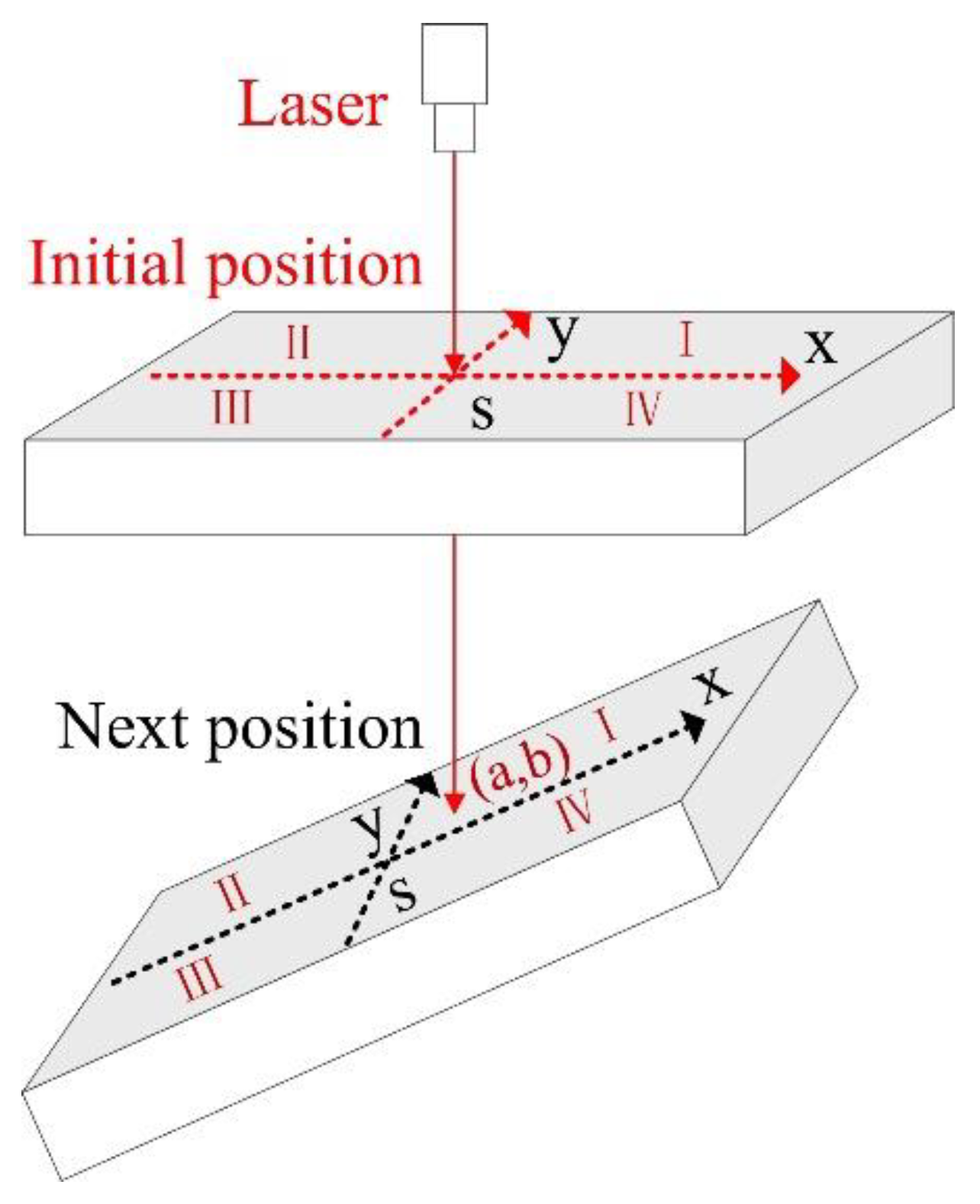
3.2. Displacement Coordinate Analysis
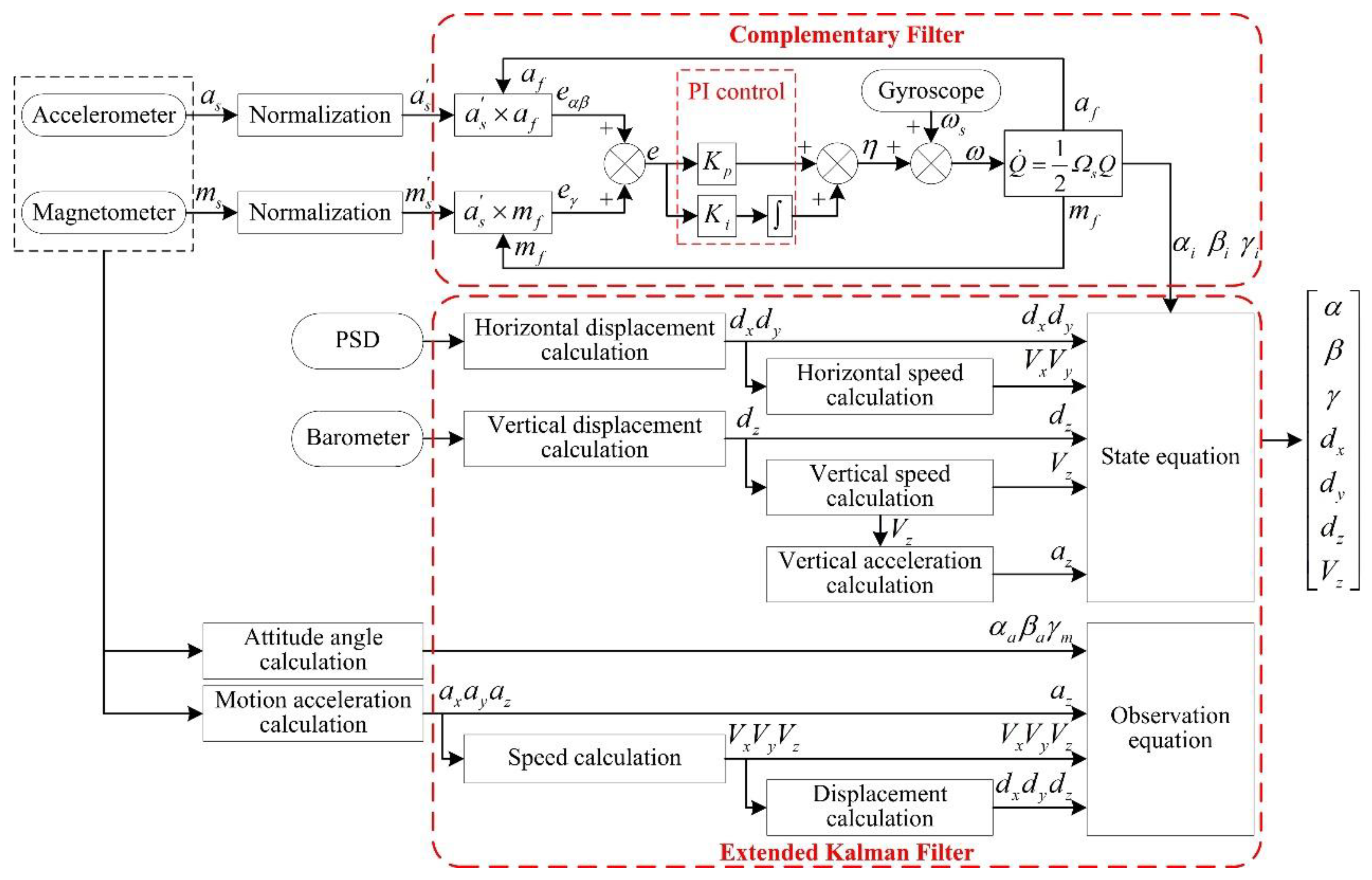
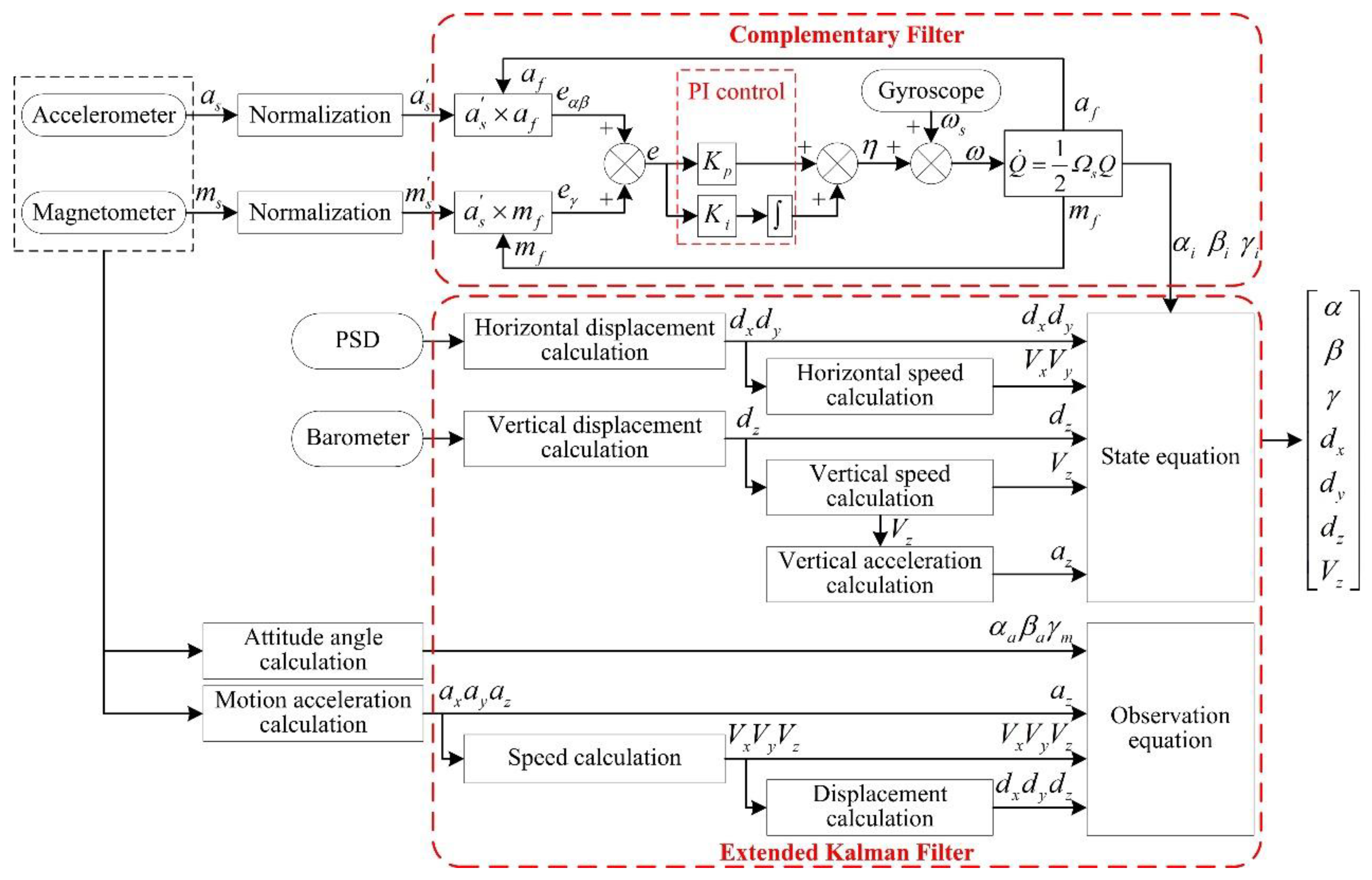
4. Attitude Estimation Algorithms
4.1. Complementary Filter
4.2. Extended Kalman Filter
- State prediction equation:is the estimation of the status variable , is the state transition matrix, i.e., the Jacobian matrix.
- Covariance prediction equation:is the estimation of the state covariance matrix , is the covariance matrix of the system noise.
- Kalman filter gain update:is the covariance matrix of the observed noise.
- Status update:
- State covariance matrix update:
5. Experiments and Discussion
5.1. Experimental Setup
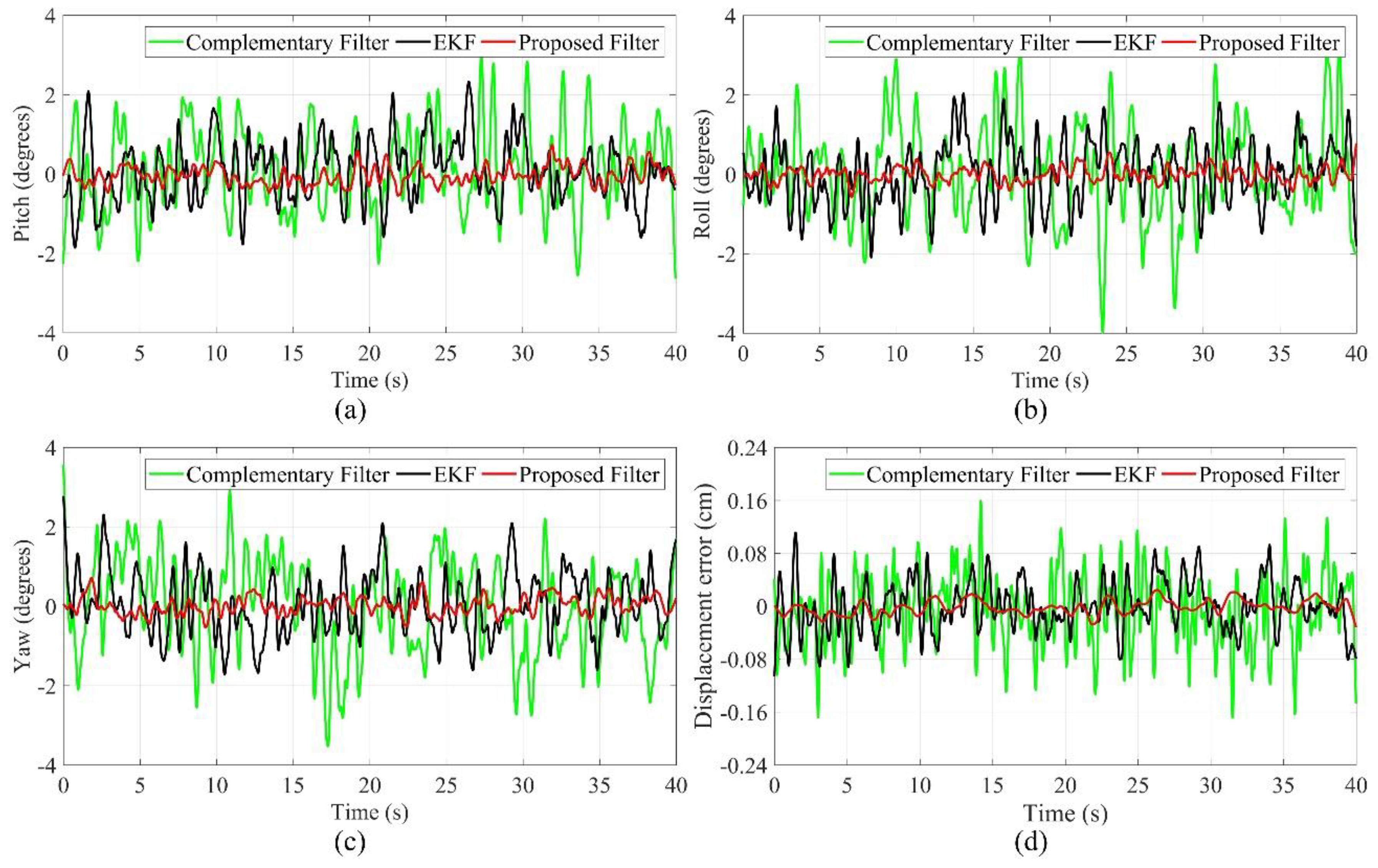
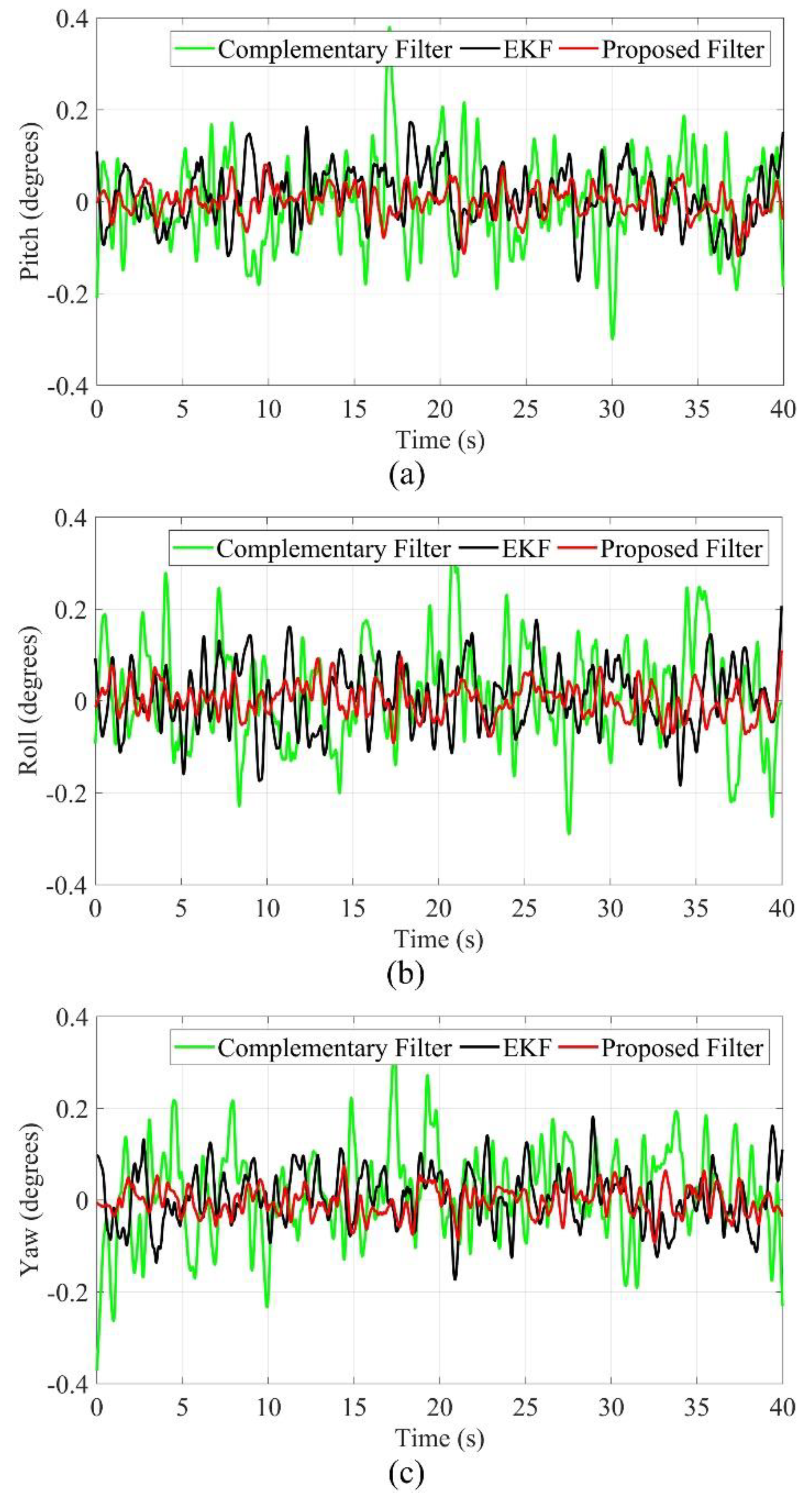
5.2. Steady-State Response Performance
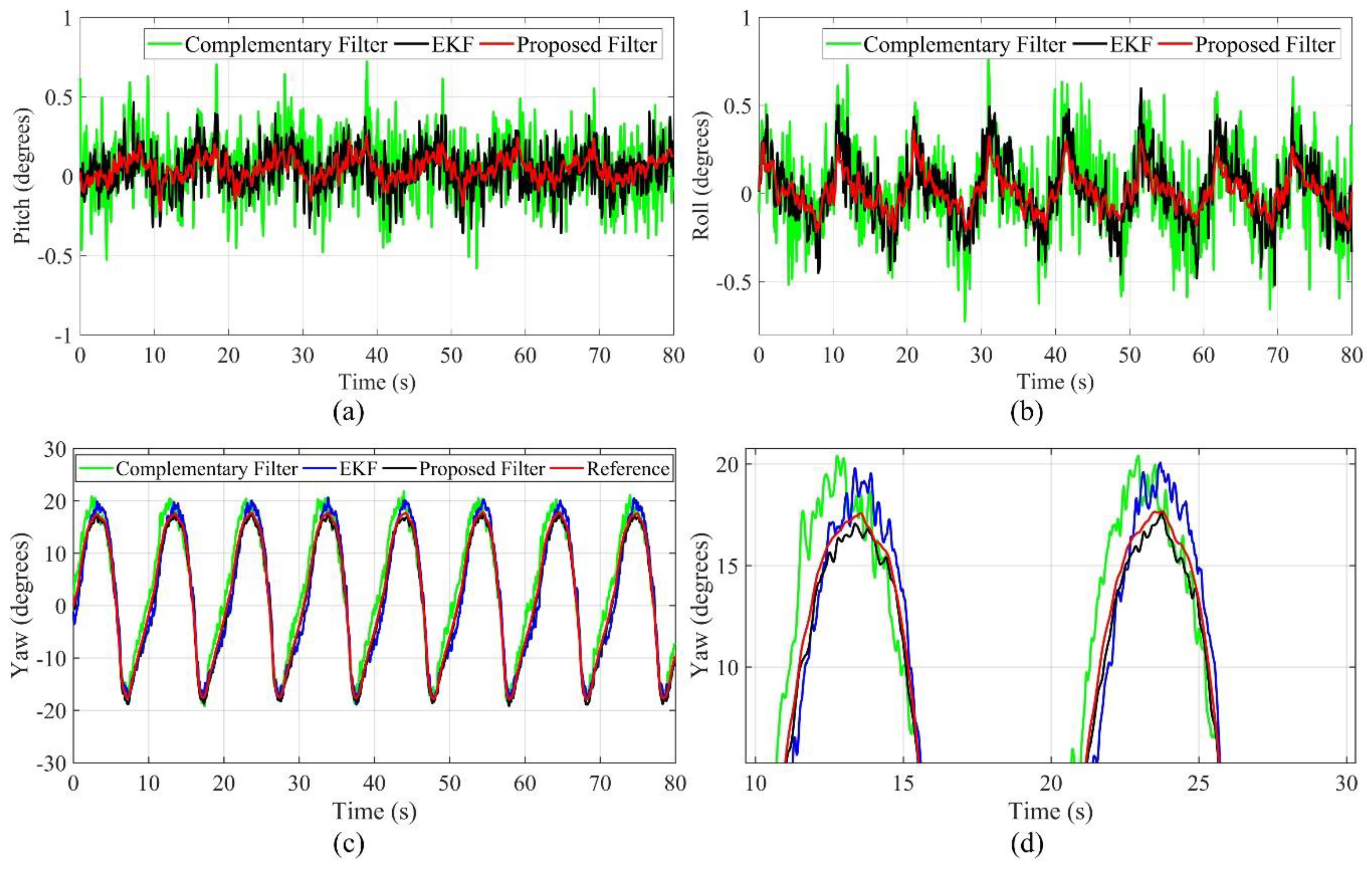
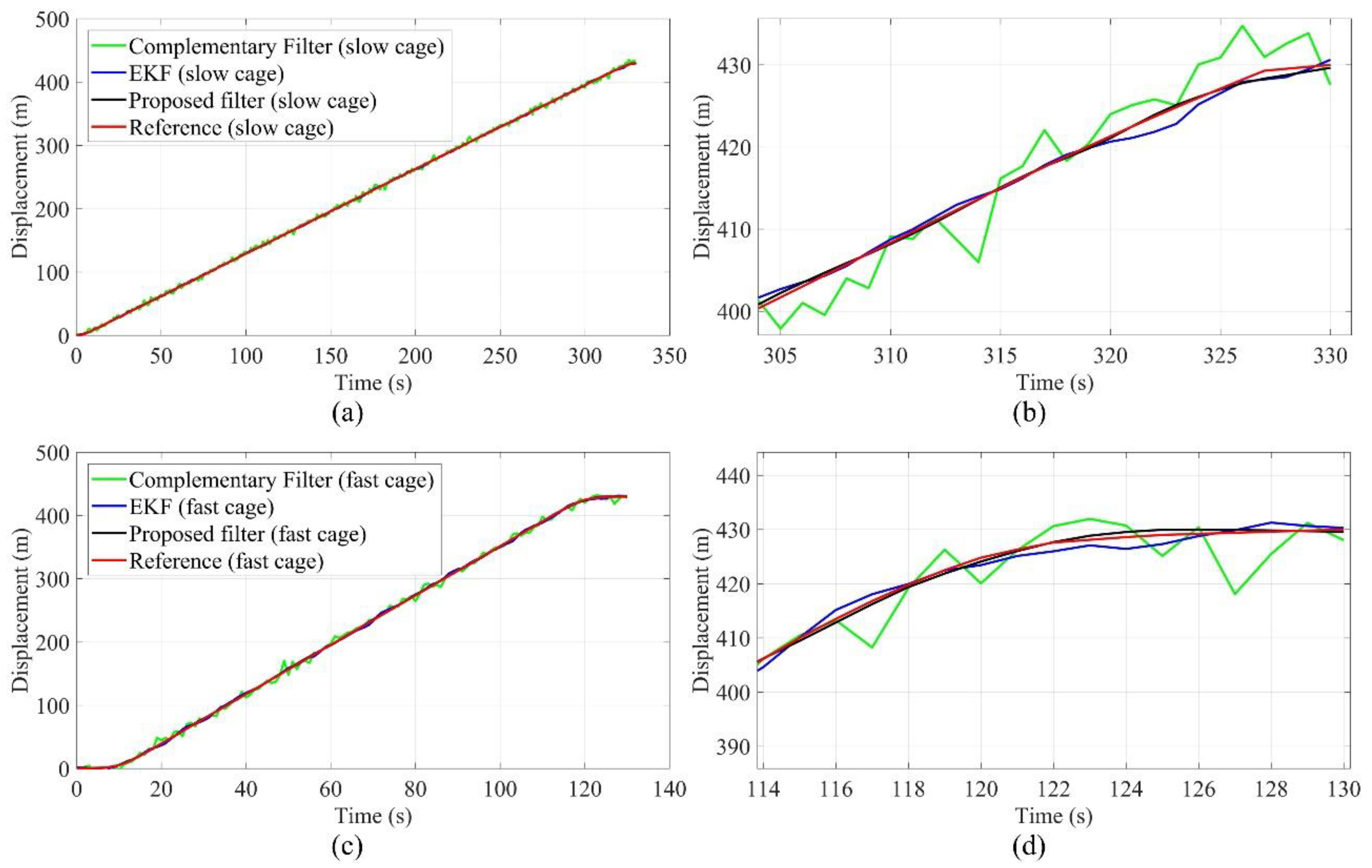
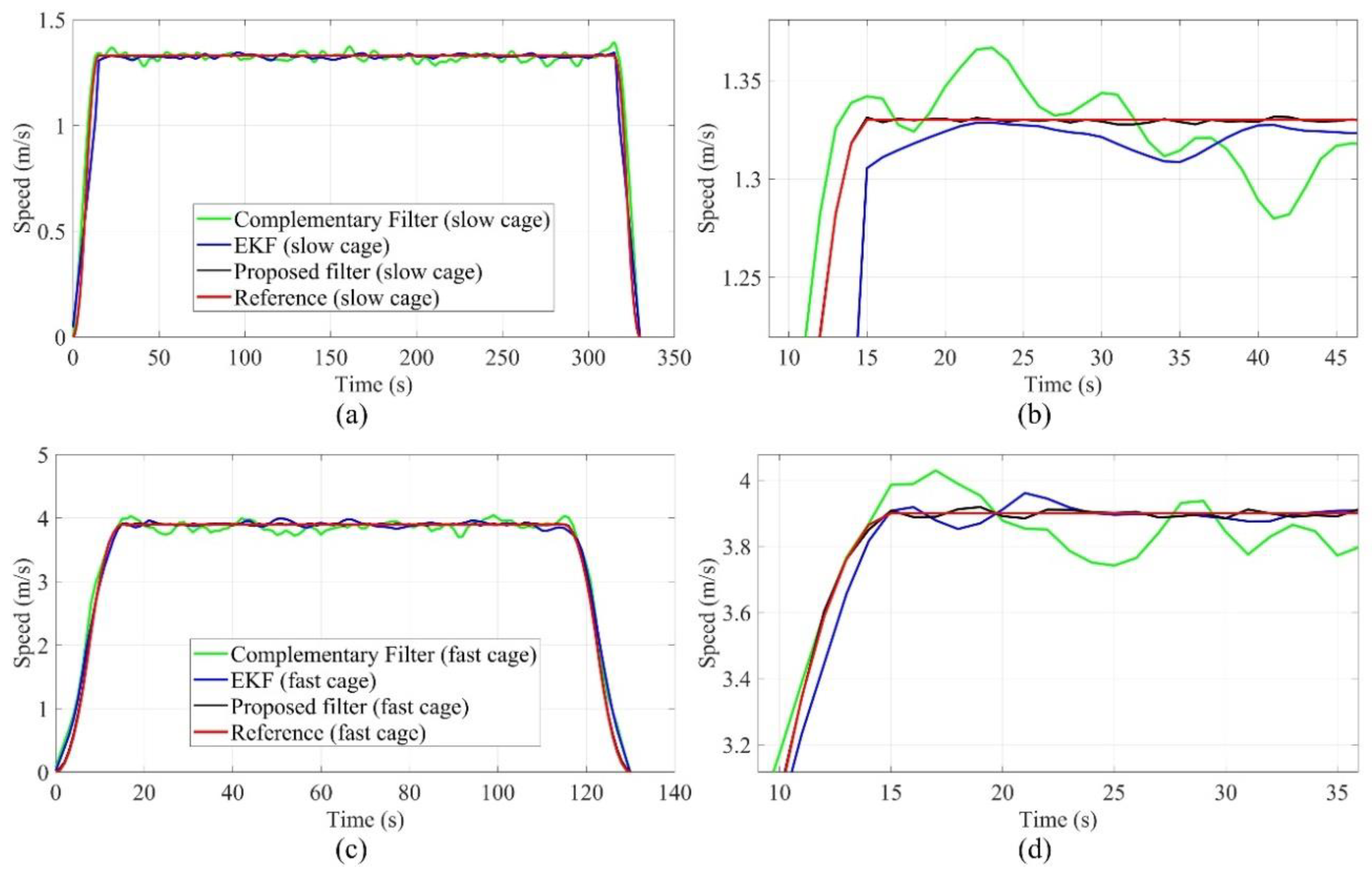
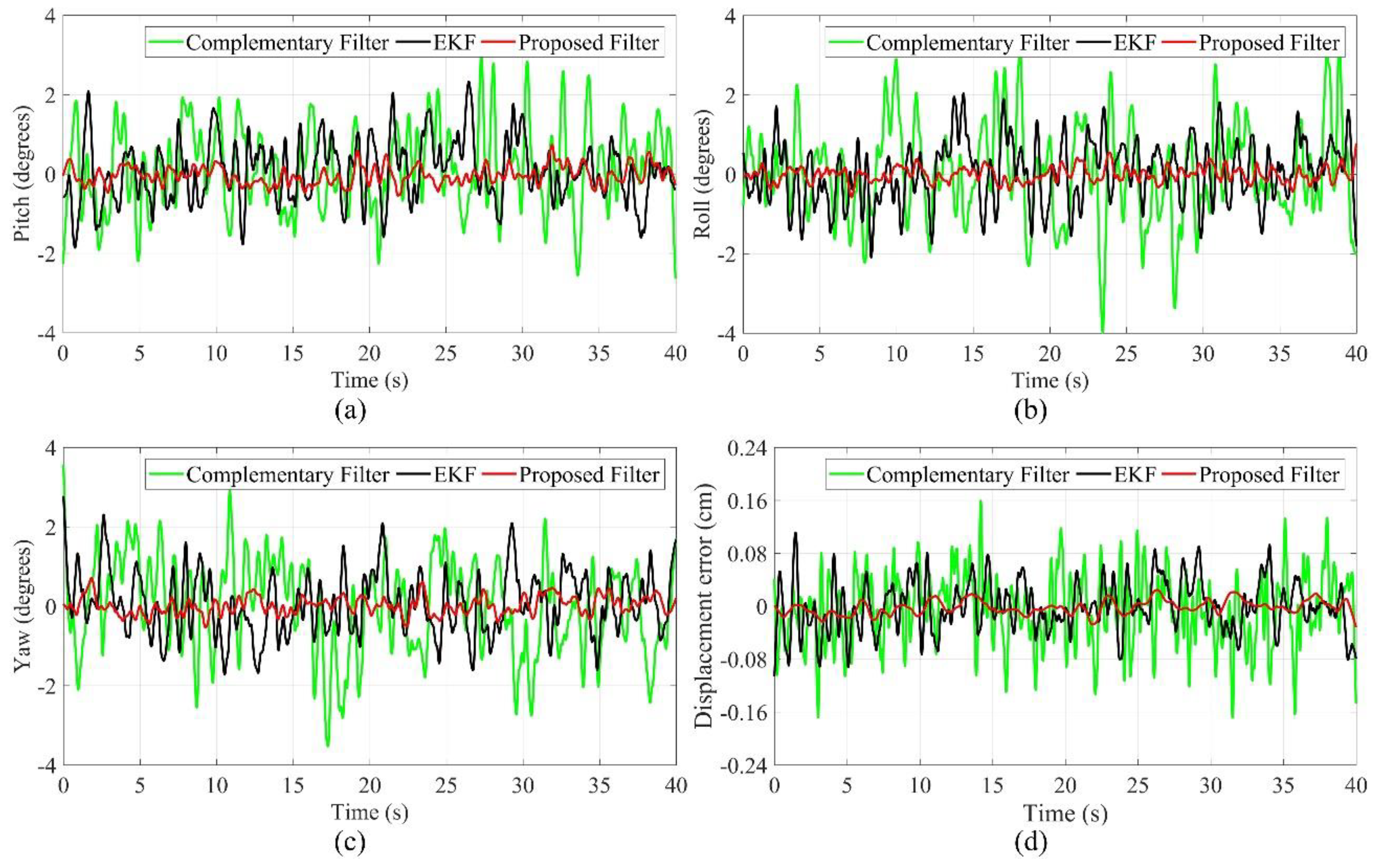
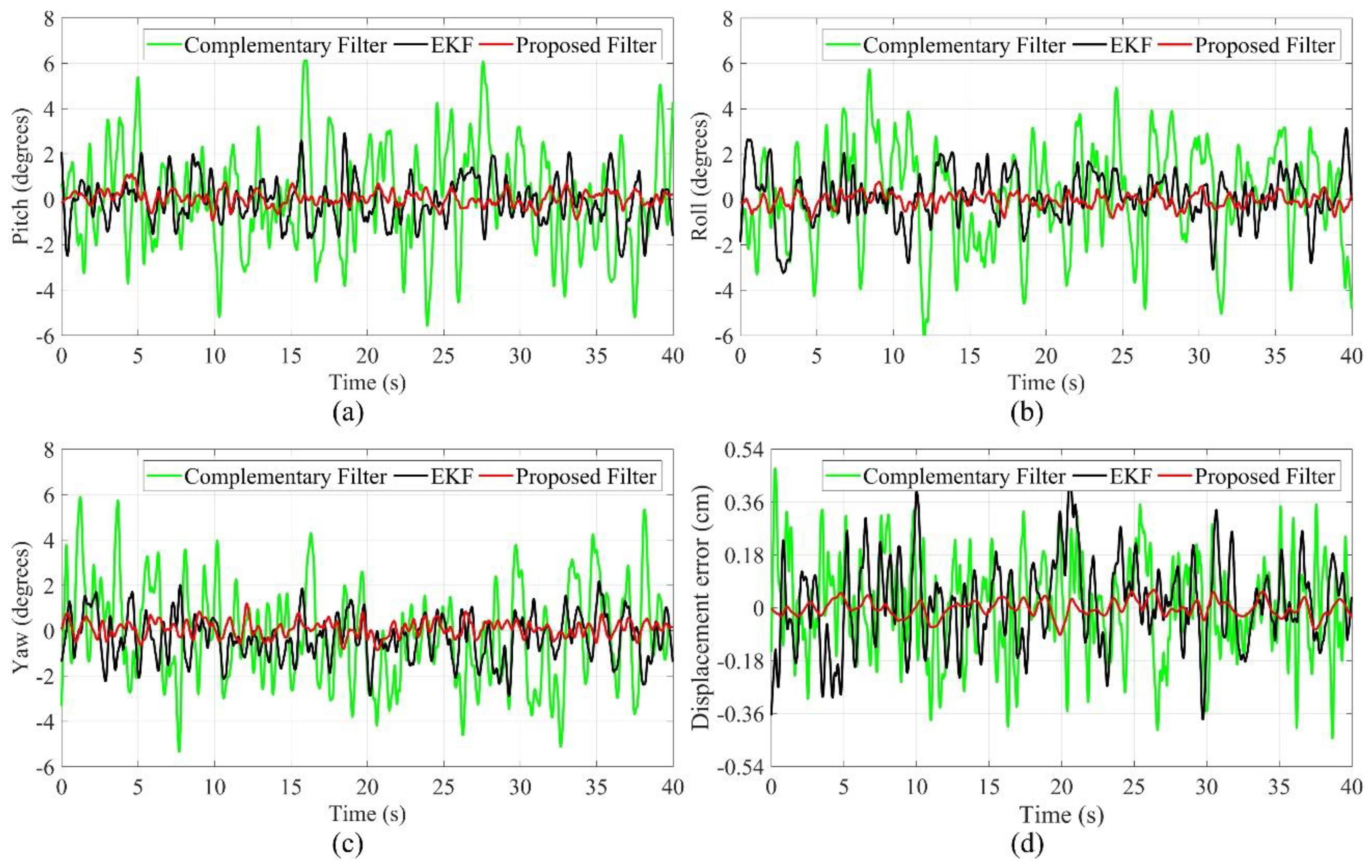
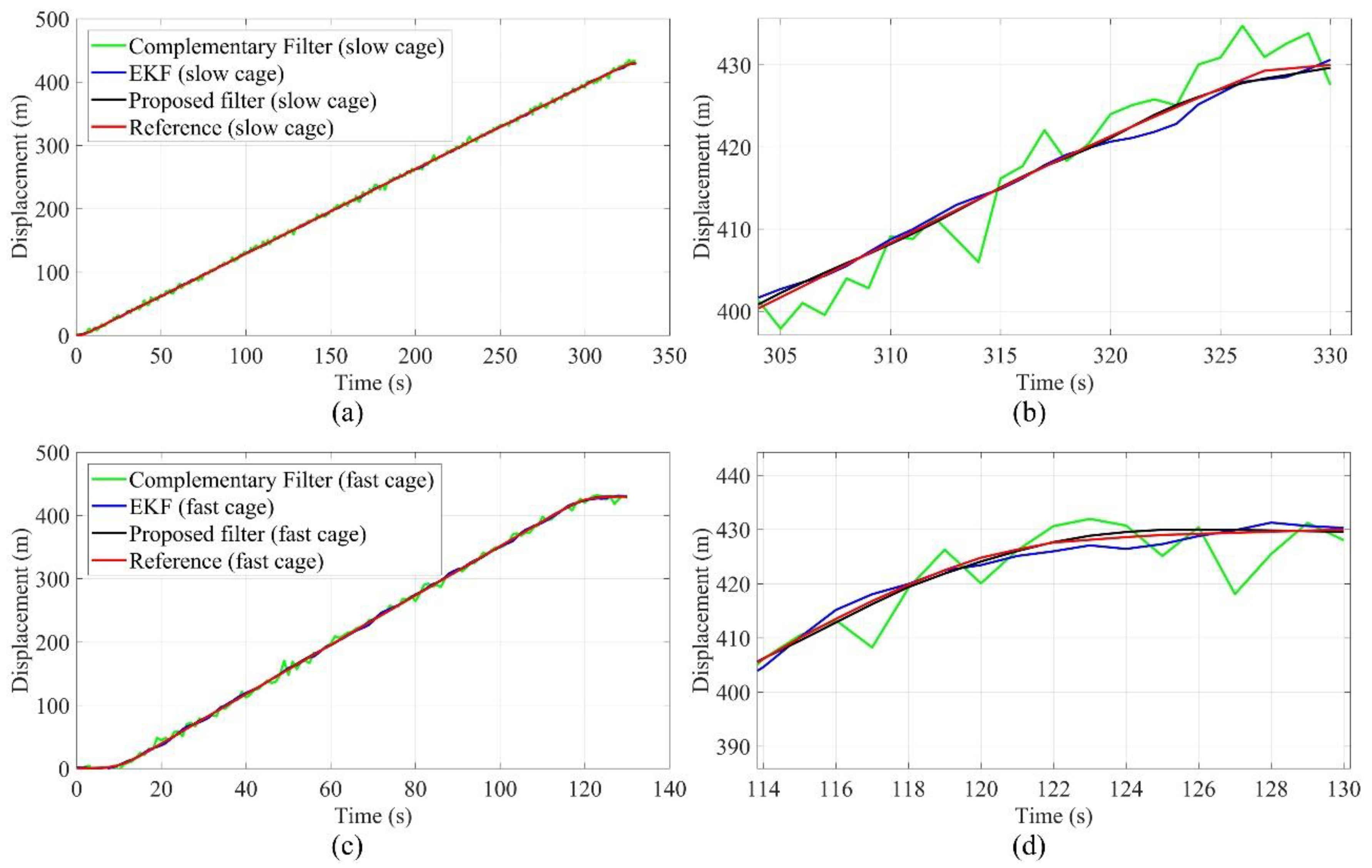
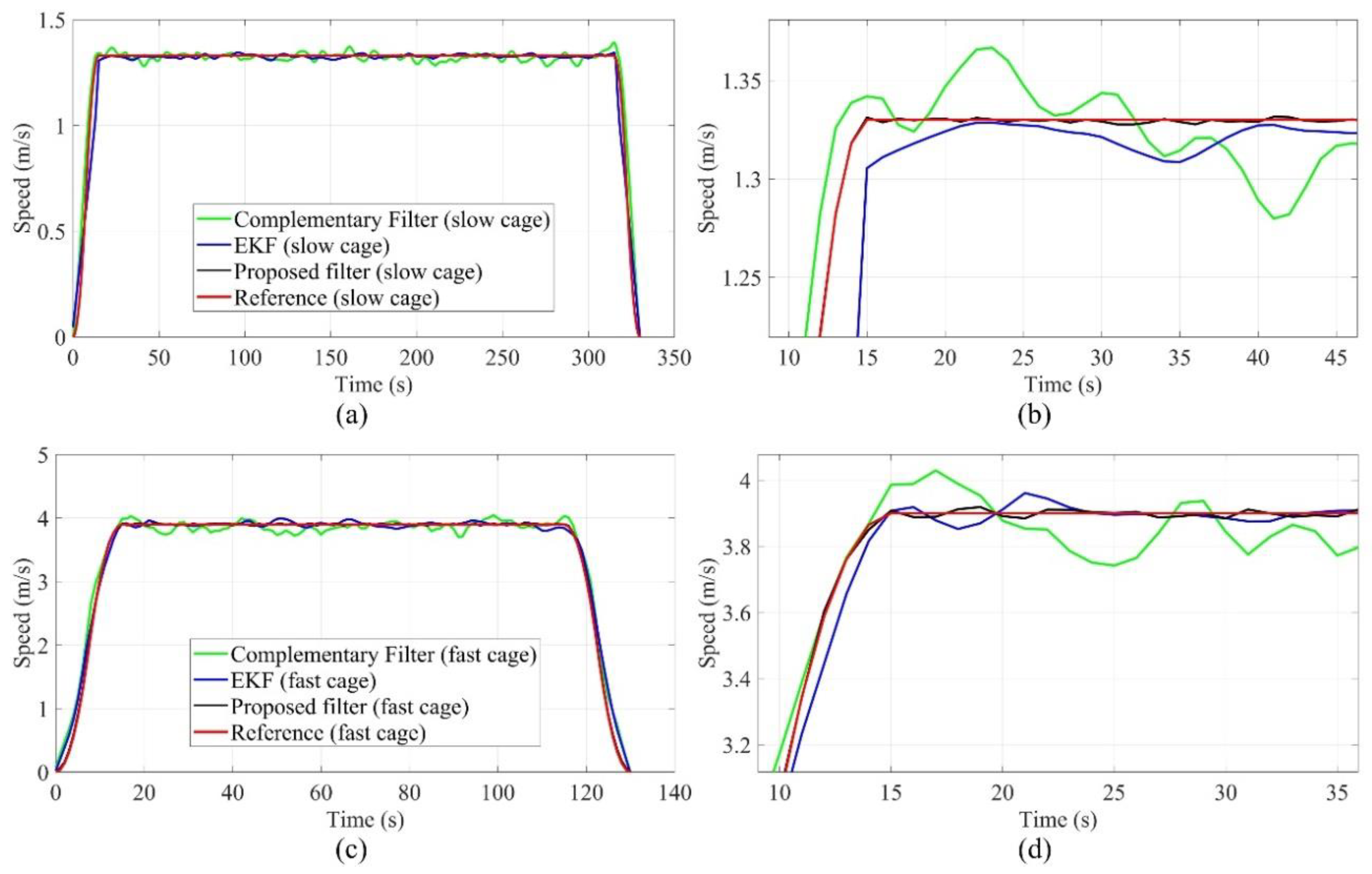
5.3. Dynamic Response Performance
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| MEMS | Micro Electro Mechanical System |
| IMU | Inertial Measurement Unit |
| SBM | Shaft Boring Machine |
| EKF | Extended Kalman Filter |
| AHRS | Attitude and Heading Reference System |
| PSD | Position Sensitive Detector |
| RISC | Reduced Instruction Set Computing |
| ARM | Advanced RISC Machine |
| FPGA | Field Programmable Gate Array |
| DSP | Digital Signal Processor |
References
- Krauze, K.; Bołoz, Ł.; Wydro, T. Mechanized shaft sinking system. Arch. Min. Sci. 2018, 63, 891–902. [Google Scholar]
- Jing, G.; Liu, Z.; Han, B. Research on shaft sinking technology and equipment of mine shaft excavator. China Coal 2018, 44, 65–70. [Google Scholar]
- Jing, G.; Gao, F. Research on automatic rectifying-deviation system of MSJ5.8/1.6D shaft heading machine. Coal Sci. Technol. 2018, 46, 27–34. [Google Scholar]
- Tiandi Scicence and Tecnology Co., Ltd. The First Shaft Boring Machine Has Been Independently Developed in China. Available online: http://www.tdtec.com/gsxw/2899.jhtml (accessed on 10 March 2016).
- Maidl, B.; Thewes, M.; Maidl, U. Handbook of Tunnel Engineering: Volume I: Structures and Methods, 1st ed.; WILEY–VCH Verlag GmbH: Weinheim, Germany, 2013; pp. 285–378. [Google Scholar]
- Neye, E.; Burger, W.; Rennkamp, P. Rapid shaft sinking. Geomech. Tunn. 2013, 6, 559–568. [Google Scholar] [CrossRef]
- Maidl, B.; Thewes, M.; Maidl, U. Handbook of Tunnel Engineering II; WILEY–VCH Verlag GmbH: Weinheim, Germany, 2014; pp. 245–275. [Google Scholar]
- Raising Measurement (Shanghai) Co., Ltd. RMS-D Automatic Guidance System. Available online: http://www.sh-raising.com/Blanchard/channels/142_2.html (accessed on 16 June 2018).
- Tokyo-Keiki. Automatic Position and Attitude Measurement System for Shield Tunneling Machine. Available online: https://www.tokyokeiki.jp/e/ (accessed on 10 March 2018).
- VMT GMBH. TUnIS Laser Guidance System for Hard Rock Boring Machine. Available online: https://vmt-gmbh.de/en/ (accessed on 10 March 2018).
- Tao, Y. Research on Automatic Measurement Method and System of Position and Attitude of Roadheader Based on Laser Measurement System. Ph.D. Thesis, China University of Mining and Technology, Beijing, China, 2017. [Google Scholar]
- Mao, S.; Shen, X.; Lu, M. Virtual laser target board for alignment control and machine guidance in tunnel-boring operations. J. Intell. Robot. Syst. 2014, 79, 385–400. [Google Scholar] [CrossRef]
- Diao, Z.; Quan, H.; Lan, L.; Han, Y. Analysis and compensation of MEMS gyroscope drift. In Proceedings of the 2013 Seventh International Conference on Sensing Technology (ICST 2013), Wellington, New Zealand, 3–5 December 2013; pp. 592–596. [Google Scholar]
- Tu, H.; Liu, L. Temperature compensation method for low cost three-axis MEMS digital angular rate gyroscopes. J. Beijing Inst. Technol. 2016, 25, 28–34. [Google Scholar]
- Liggins, M.E.; Hall, D.L.; Llinas, J. Handbook of Multisensor Data Fusion: Theory and Practice, 2nd ed.; CRC Press, Taylor & Francis Group: London, UK, 2008; pp. 15–36. [Google Scholar]
- Raol, J.R. Multi-Sensor Data Fusion with MATLAB; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2009; pp. 11–30. [Google Scholar]
- Palubinskas, G. Framework for multi-sensor data fusion using template based matching. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 621–624. [Google Scholar]
- Pawase, R.; Futane, N.P. Angular rate error compensation of MEMS based gyroscope using artificial neural network. In Proceedings of the 2015 International Conference on Pervasive Computing (ICPC), Pune, India, 8–10 January 2015; p. 4. [Google Scholar]
- Bai, J.; Chen, W.; Cai, T. Compensation for MEMS gyroscope zero bias stability. In Proceedings of the 2013 Chinese Automation Congress (CAC 2013), Changsha, China, 7–8 November 2013; p. 5. [Google Scholar]
- Carminati, M.; Ferrari, G.; Grassetti, R.; Sampietro, M. Real-time data fusion and MEMS sensors fault detection in an aircraft emergency attitude unit based on Kalman filtering. IEEE Sens. J. 2012, 12, 2984–2992. [Google Scholar] [CrossRef]
- Searcy, J.D.; Pernicka, H.J. Magnetometer-only attitude determination using novel two-step Kalman filter approach. J. Guid. Control Dyn. 2012, 35, 1693–1701. [Google Scholar] [CrossRef]
- Chang, L.; Zha, F.; Qin, F. Indirect Kalman filtering based attitude estimation for low-cost attitude and heading reference systems. IEEE ASME Trans. Mechatron. 2017, 22, 1850–1858. [Google Scholar] [CrossRef]
- Nekrasov, Y.A.; Pavlova, S.V.; Moiseev, N.V. MEMS gyro vibration immunity and its measurement with TIRA shaker. In Proceedings of the IEEE International and Measurement Technology Conference (I2MTC), Pisa, Italy, 11–14 May 2015; pp. 1763–1767. [Google Scholar]
- Lestev, A.M. Combination resonances in mems gyro dynamics. Gyrosc. Navig. 2015, 6, 41–44. [Google Scholar] [CrossRef]
- Nekrasov, Y.A.; Moiseev, N.V.; Belyaev, Y.V.; Pavlova, S.V.; Lyukshonkov, R.G. Influence of translational vibrations, shocks and acoustic noise on MEMS gyro performance. Gyrosc. Navig. 2017, 8, 31–37. [Google Scholar] [CrossRef]
- Lall, P.; Abrol, A.S.; Suhling, J.; Simpson, L.; Glover, J.; Locker, D. Effect of simultaneous high temperature and vibration on MEMS based vibratory gyroscope. In Proceedings of the 16th IEEE Intersociety Conference on Thermal and Thermomechanical Phenomena in Electronic Systems (ITherm), Orlando, FL, USA, 30 May–2 June 2017; pp. 1214–1228. [Google Scholar]
- Wachter, Z. A cost effective motion platform for performance testing of MEMS-based attitude and heading reference systems. J. Intell. Robot. Syst. 2013, 70, 411–419. [Google Scholar] [CrossRef]
- Li, W.; Wang, J. Effective adaptive Kalman filter for MEMS-IMU/magnetometers integrated attitude and heading reference systems. J. Navig. 2012, 66, 99–113. [Google Scholar] [CrossRef]
- Gao, T.; Shen, C.; Gong, Z.; Rao, J.; Luo, J. An adaptive filter for a small attitude and heading reference system using low cost sensors. In Advances in Computer, Communication, Control and Automation; Springer: Berlin/Heidelberg, Germany, 2011; pp. 131–139. [Google Scholar]
- Guerrero-Castellanos, J.F.; Madrigal-Sastre, H.; Durand, S.; Torres, L.; Munoz-Hernandez, G.A. A robust nonlinear observer for real-time attitude estimation using low-cost MEMS inertial sensors. Sensors 2013, 13, 15138–15158. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Q.; Xiao, C.; Hu, H.; Liu, Y.; Wu, J. Multi-sensor based online attitude estimation and stability measurement of articulated heavy vehicles. Sensors 2018, 18, 212. [Google Scholar] [CrossRef] [PubMed]
- Bergamini, E.; Ligorio, G.; Summa, A.; Vannozzi, G.; Cappozzo, A.; Sabatini, A.M. Estimating orientation using magnetic and inertial sensors and different sensor fusion approaches: Accuracy assessment in manual and locomotion tasks. Sensors 2014, 14, 18625–18649. [Google Scholar] [CrossRef] [PubMed]
- Martin, P.; Salaün, E. Design and implementation of a low-cost observer-based attitude and heading reference system. Control Eng. Pract. 2010, 18, 712–722. [Google Scholar] [CrossRef]
- Brückner, H.P.; Spindeldreier, C.; Blume, H. Modification and fixed-point analysis of a Kalman filter for orientation estimation based on 9D inertial measurement unit data. In Proceedings of the 35th Annual International Conference of the IEEE EMBS, Osaka, Japan, 3–7 July 2013; pp. 3953–3956. [Google Scholar]
- Cavallo, A.; Cirillo, A.; Cirillo, P.; de Maria, G.; Falco, P.; Natale, C.; Pirozzi, S. Experimental comparison of sensor fusion algorithms for attitude estimation. In Proceedings of the 19th World Congress, The International Federation of Automatic Control, Cape Town, South Africa, 24–29 August 2014; pp. 7585–7591. [Google Scholar]
- Zhang, T.; Liao, Y. Attitude measure system based on extended Kalman filter for multi-rotors. Comput. Electron. Agric. 2017, 134, 19–26. [Google Scholar] [CrossRef]
- Sabatelli, S.; Galgani, M.; Fanucci, L. A double stage Kalman filter for sensor fusion and orientation tracking in 9D IMU. IEEE Trans. Instrum. Meas. 2013, 62, 590–598. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, S.; Liu, C.; Yuan, X.; Liu, S. A dual-linear Kalman filter for real-time orientation determination system using low-cost MEMS sensors. Sensors 2016, 16, 264. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, Z.; Zhang, T.; Shen, Y. An improved Kalman filter for attitude determination of multi-rotor UAVs based on low-cost MEMS sensors. In Proceedings of the IEEE Chinese Guidance, Navigation and Control Conference, Nanjing, China, 12–14 August 2016; pp. 407–412. [Google Scholar]
- Renaudin, V.; Combettes, C. Magnetic, acceleration fields and gyroscope quaternion (MAGYQ)-based attitude estimation with smartphone sensors for indoor pedestrian navigation. Sensors 2014, 14, 22864–22890. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X. Research on the attitude and navigation information fusion algorithm of multi-rotor UAV. Ph.D. Thesis, Chinese Academy of Sciences, Changchun, China, 2015. [Google Scholar]
- Xing, H.; Hou, B.; Lin, Z.; Guo, M. Modeling and compensation of random drift of MEMS gyroscopes based on least squares support vector machine optimized by chaotic particle swarm optimization. Sensors 2017, 17, 2335. [Google Scholar] [CrossRef] [PubMed]
- Fekri, S.; Athans, M.; Pascoal, A. RMMAC: A novel robust adaptive control scheme—Part I: Architecture. In Proceedings of the 43rd IEEE Conference on Decision and Control, Nassau, Bahamas, 14–17 December 2004; pp. 1134–1139. [Google Scholar]
- Sadati, N.; Hosseinzadeh, M.; Dumont, G.A. Multi-model robust control of depth of hypnosis. Biomed. Signal Process. Control 2018, 40, 443–453. [Google Scholar] [CrossRef]
- Euston, M.; Coote, P.; Mahony, R.; Kim, J.; Hamel, T. A complementary filter for attitude estimation of a fixed-wing UAV. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 340–349. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
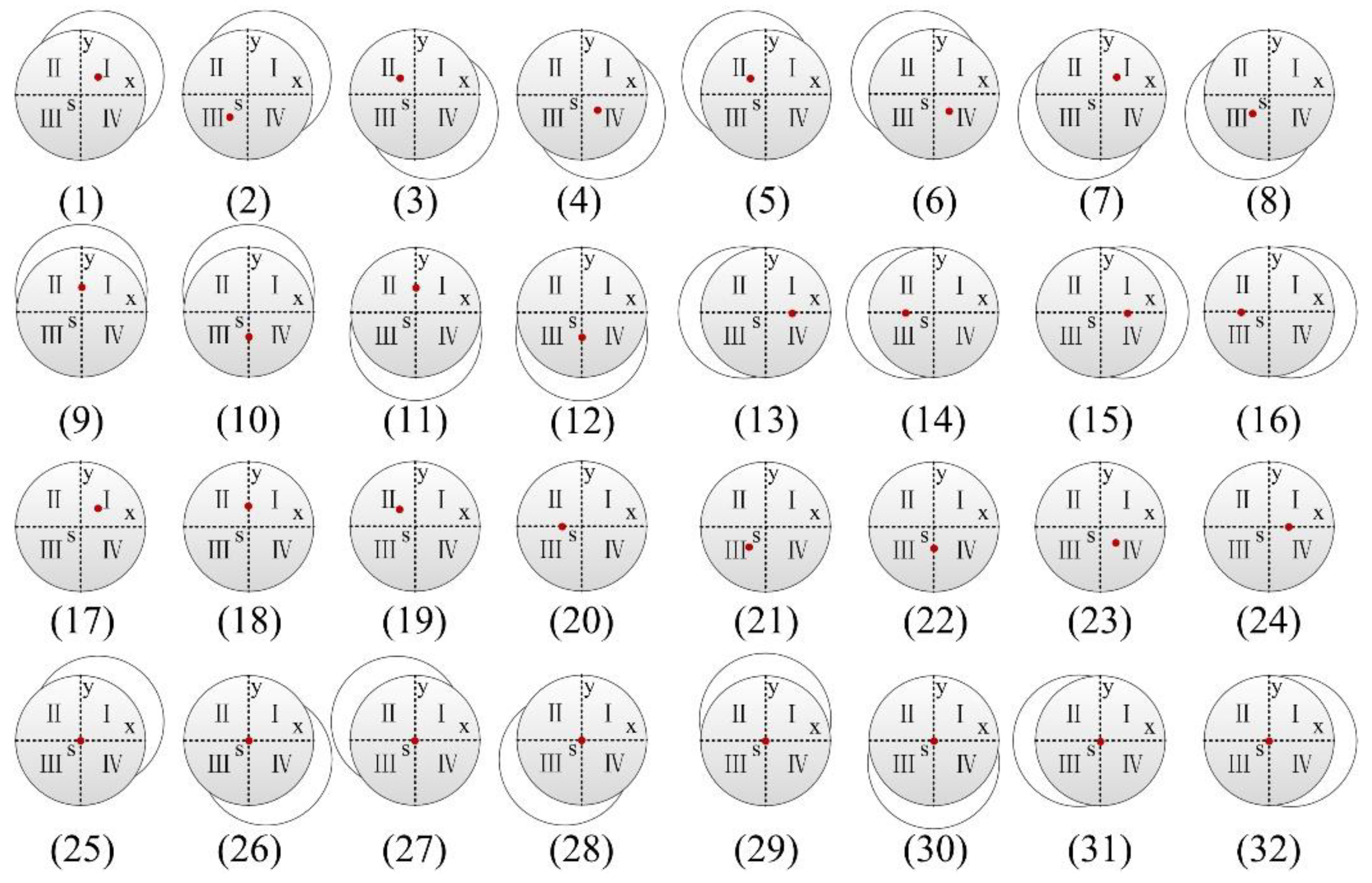
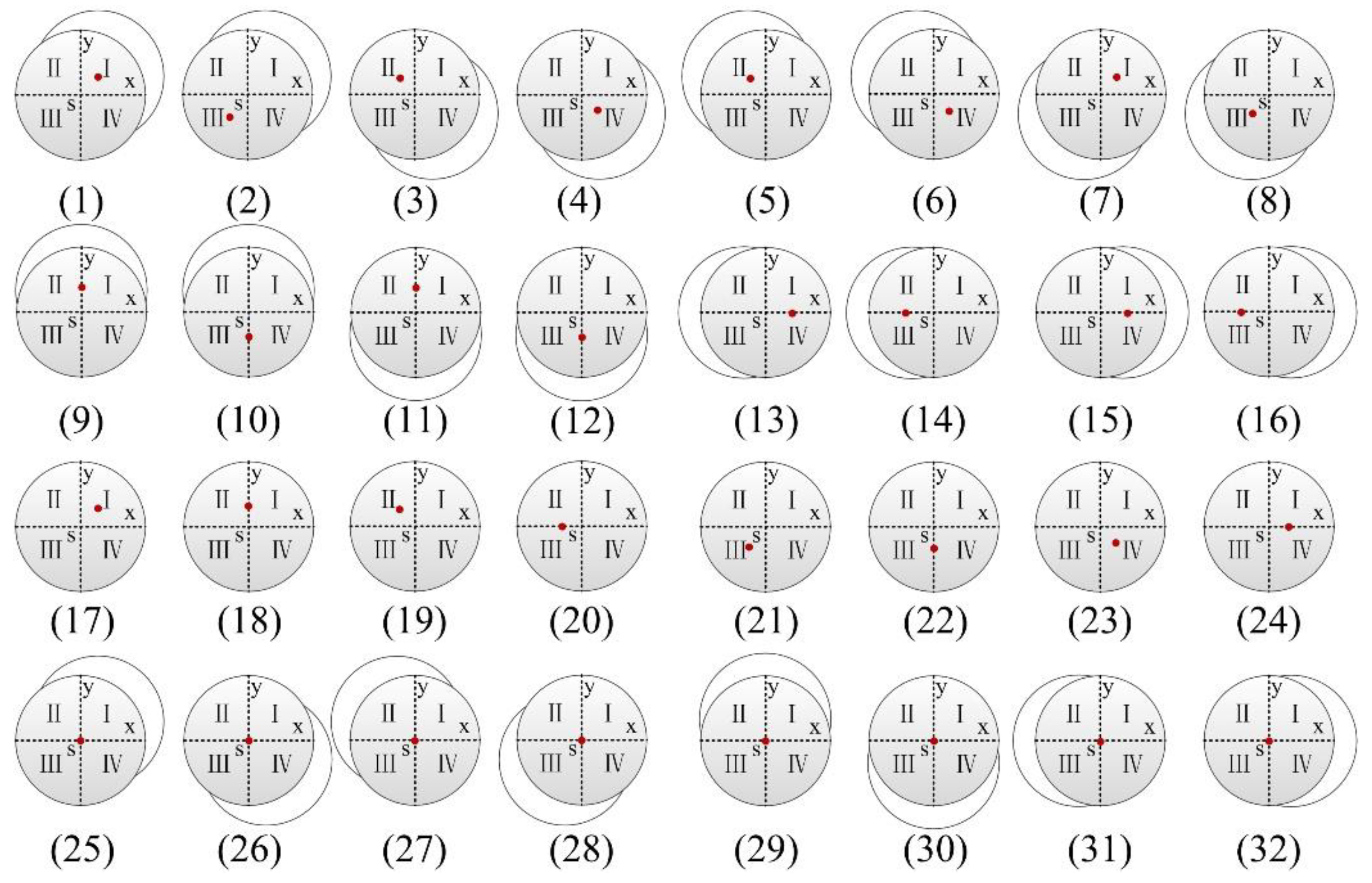
| Light Spot Position | Bottom Deviation of SBM (Serial Numbers in Figure 7) | Angle Coordinate Values | Displacement Coordinate Values |
|---|---|---|---|
| Quadrant I | Upper right (1) | β > 0, α > 0 | a > 0, b > 0 |
| Quadrant I | Left lower (7) | β < 0, α < 0 | a > 0, b > 0 |
| Quadrant I | Only displacement deviation (17) | β = 0, α = 0 | a > 0, b > 0 |
| Quadrant II | Right lower (3) | β > 0, α < 0 | a < 0, b > 0 |
| Quadrant II | Upper left (5) | β < 0, α > 0 | a < 0, b > 0 |
| Quadrant II | Only displacement deviation (19) | β = 0, α = 0 | a < 0, b > 0 |
| Quadrant III | Upper right (2) | β > 0, α > 0 | a < 0, b < 0 |
| Quadrant III | Left lower (8) | β < 0, α < 0 | a < 0, b < 0 |
| Quadrant III | Only displacement deviation (21) | β = 0, α = 0 | a < 0, b < 0 |
| Quadrant IV | Right lower (4) | β > 0, α < 0 | a > 0, b < 0 |
| Quadrant IV | Upper left (6) | β < 0, α > 0 | a > 0, b < 0 |
| Quadrant IV | Only displacement deviation (23) | β = 0, α = 0 | a > 0, b < 0 |
| Positive half of X axis | Left (13) | β < 0, α = 0 | a > 0, b = 0 |
| Positive half of X axis | Right (15) | β > 0, α = 0 | a > 0, b = 0 |
| Positive half of X axis | Only displacement deviation (24) | β = 0, α = 0 | a > 0, b = 0 |
| Negative half of X axis | Left (14) | β < 0, α = 0 | a < 0, b = 0 |
| Negative half of X axis | Right (16) | β > 0, α = 0 | a < 0, b = 0 |
| Negative half of X axis | Only displacement deviation (20) | β = 0, α = 0 | a < 0, b = 0 |
| Positive half of Y axis | Up (9) | β = 0, α > 0 | a = 0, b > 0 |
| Positive half of Y axis | Down (11) | β = 0, α < 0 | a = 0, b > 0 |
| Positive half of Y axis | Only displacement deviation (18) | β = 0, α = 0 | a = 0, b > 0 |
| Negative half of Y axis | Up (10) | β = 0, α > 0 | a = 0, b < 0 |
| Negative half of Y axis | Down (12) | β = 0, α < 0 | a = 0, b < 0 |
| Negative half of Y axis | Only displacement deviation (22) | β = 0, α = 0 | a = 0, b < 0 |
| Central point S | Only angle deviation (upper right) (25) | β > 0, α > 0 | a = 0, b = 0 |
| Central point S | Only angle deviation (right lower) (26) | β > 0, α < 0 | a = 0, b = 0 |
| Central point S | Only angle deviation (upper left) (27) | β < 0, α > 0 | a = 0, b = 0 |
| Central point S | Only angle deviation (left lower) (28) | β < 0, α < 0 | a = 0, b = 0 |
| Central point S | Only angle deviation (up) (29) | β = 0, α > 0 | a = 0, b = 0 |
| Central point S | Only angle deviation (down) (30) | β = 0, α < 0 | a = 0, b = 0 |
| Central point S | Only angle deviation (left) (31) | β < 0, α = 0 | a = 0, b = 0 |
| Central point S | Only angle deviation (right) (32) | β > 0, α = 0 | a = 0, b = 0 |
| Central point S | No deviation | β = 0, α = 0 | a = 0, b = 0 |
| Attitude Angles (°) | Complementary Filter | EKF | Proposed Filter |
|---|---|---|---|
| Pitch (static) | 0.07 | 0.05 | 0.02 |
| Roll (static) | 0.08 | 0.07 | 0.04 |
| Yaw (static) | 0.12 | 0.11 | 0.07 |
| Pitch (low speed) | 1.93 | 1.54 | 0.26 |
| Roll (low speed) | 1.87 | 1.48 | 0.24 |
| Yaw (low speed) | 2.11 | 1.75 | 0.37 |
| Pitch (high speed) | 3.13 | 2.42 | 0.51 |
| Roll (high speed) | 3.24 | 2.35 | 0.56 |
| Yaw (high speed) | 3.17 | 2.47 | 0.75 |
| Pitch (dynamic response) | 0.35 | 0.26 | 0.14 |
| Roll (dynamic response) | 0.47 | 0.38 | 0.23 |
| Yaw (dynamic response) | 3.52 | 2.73 | 1.16 |
| Displacement Errors | Complementary Filter | EKF | Proposed Filter |
|---|---|---|---|
| Drilling at low speed | 0.11 cm | 0.06 cm | 0.02 cm |
| Drilling at high speed | 0.24 cm | 0.15 cm | 0.07 cm |
| Displacement tracking of fast cage | 4.64 m | 3.22 m | 1.36 m |
| Displacement tracking of slow cage | 3.37 m | 2.15 m | 0.53 m |
| Speed Errors (m/s) | Complementary Filter | EKF | Proposed Filter |
|---|---|---|---|
| Speed tracking of fast cage | 0.23 | 0.17 | 0.06 |
| Speed tracking of slow cage | 0.16 | 0.11 | 0.03 |
| Algorithms | TMS320F28335 | STM32F051 | MSP430F5418 | ATmega128 |
|---|---|---|---|---|
| Complementary Filter | 0.08 ms | 2.45 ms | 47.37 ms | 232.53 ms |
| EKF | 2.35 ms | 57.32 ms | 1.15 s | 5.21 s |
| Proposed Filter | 2.46 ms | 61.21 ms | 1.26 s | 5.87 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Liu, J.; Liu, Y.; Fu, W.; Zhu, L. Multi-Sensor Fusion and Error Compensation of Attitude Measurement System for Shaft Boring Machine. Sensors 2019, 19, 5007. https://doi.org/10.3390/s19225007
Wang X, Liu J, Liu Y, Fu W, Zhu L. Multi-Sensor Fusion and Error Compensation of Attitude Measurement System for Shaft Boring Machine. Sensors. 2019; 19(22):5007. https://doi.org/10.3390/s19225007
Chicago/Turabian StyleWang, Xinliang, Jiangong Liu, Yang Liu, Wenjun Fu, and Lei Zhu. 2019. "Multi-Sensor Fusion and Error Compensation of Attitude Measurement System for Shaft Boring Machine" Sensors 19, no. 22: 5007. https://doi.org/10.3390/s19225007
APA StyleWang, X., Liu, J., Liu, Y., Fu, W., & Zhu, L. (2019). Multi-Sensor Fusion and Error Compensation of Attitude Measurement System for Shaft Boring Machine. Sensors, 19(22), 5007. https://doi.org/10.3390/s19225007