1. Introduction
Unmanned aerial vehicles (UAVs) have been widely used in a large number of applications over the last years in many different fields, for example, environmental monitoring [
1,
2,
3], visual coverage [
4,
5,
6], natural disaster management [
7,
8,
9,
10], among others.
When scanning large areas, a multi-UAV system can execute a monitoring task more efficiently and faster than a single aircraft, with the possibility to acquire images simultaneously and from different points of view. A team of UAVs working according to an adequate collaboration strategy can overcome typical limitations in terms of autonomy and short-range associated with a single UAV, therefore covering larger areas and ensuring the fast execution of the mission, while also aggregating cost reduction, fault tolerance and scalability to the task [
11].
Establishing a stable and reliable UAV network is a challenging task. Many issues should be addressed before its effective use in order to provide efficient communication among the UAVs. Differently from common ad hoc networks, flying ad hoc networks (FANETs) must deal with several hard constraints depending on the application, including high mobility and varying speeds of the UAVs, intermittency of communication links and dynamic changes in topology [
12]. In order to preserve the quality of services and ensure the reliable transmission of packets between end nodes, routing protocols must address specific issues other than those found in conventional proactive or reactive schemes. The network must reorganize itself often and, sometimes, it may even get partitioned. Since autonomy is an important issue in UAVs, FANETs must deal with energy saving in order to increase the network lifespan [
13]. Therefore, all components of the FANETs face distinct challenges to be solved. Some recent works have addressed improvements in the communication system through routing protocols [
14,
15], Quality of Service (QoS) [
16], distinct architectures [
17,
18], resilience [
19], as well as other characteristics that may bring additional reliability and safety to the system.
Barreira do Inferno Launch Center (CLBI,
Centro de Lançamento da Barreira do Inferno) is one of the Brazilian suborbital rocket launch centers, which is located in the city of Parnamirim, state of Rio Grande do Norte at the northeastern shore. During the launching chronology, before a rocket launching is performed, it is necessary to scan the predicted impact area in order to detect possible intruder boats and escort any ship found out of the restricted area. Nowadays, the impact area scanning procedure is executed by the CLBI using a manned aircraft (model EMB-110 Bandeirante), which involves a time consuming and expensive procedure. This task can be more efficient and cost-effective if performed by UAVs [
20].
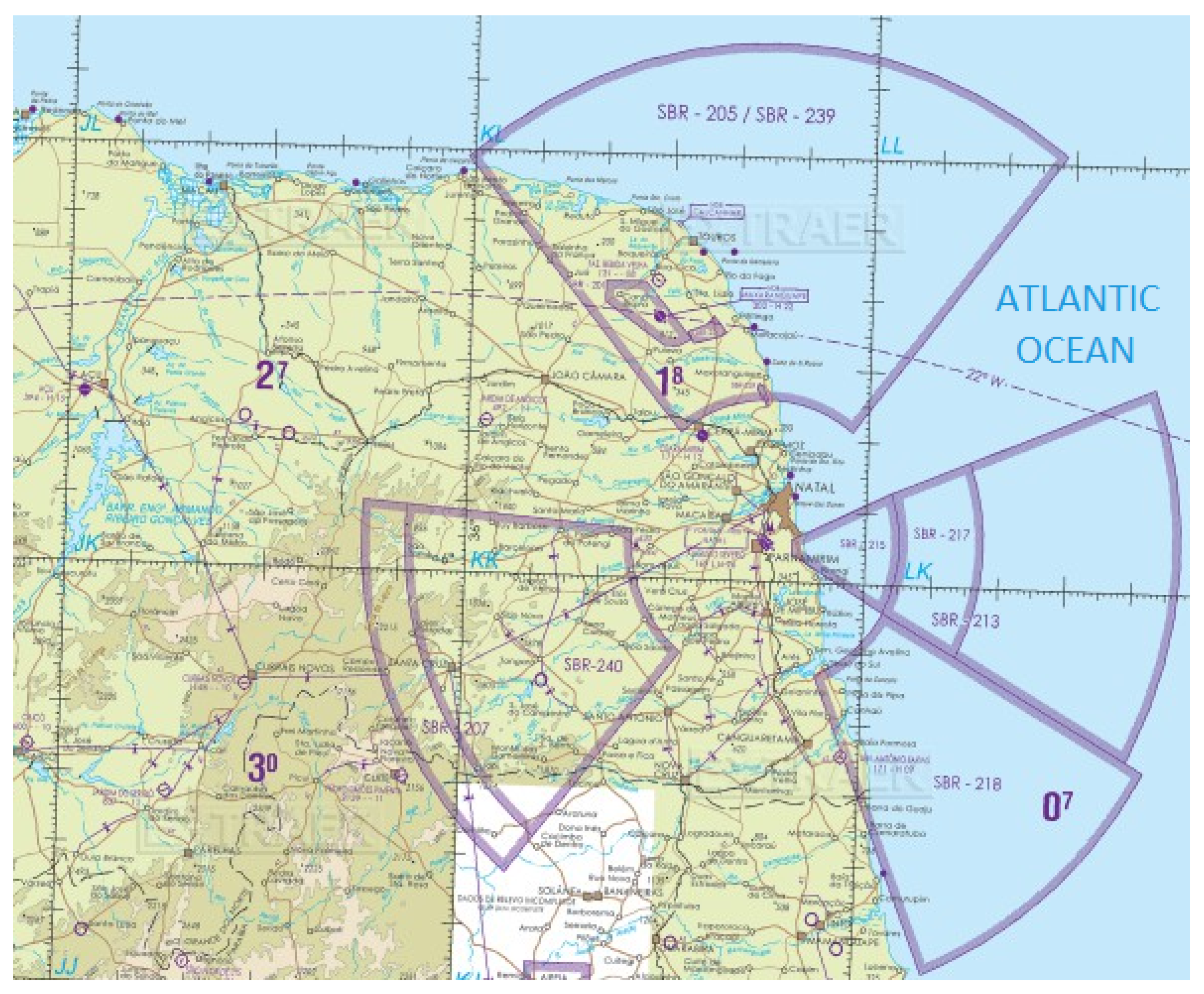
For basic training rocket and intermediate training rocket launchings, the rocket reach and radius of the impact area are within the range of a few kilometers, as it can be seen in
Figure 1, where SBR-215 and SBR-217 correspond to restricted airspaces. The scanning procedure can be performed by a single UAV in this case [
20,
21]. For larger rocket launching procedures, the reach and radius of the area to be scanned is also larger according to
Figure 1, where SBR-213 is a restricted airspace. A single UAV will not be capable of performing the scanning procedure accurately, mainly due to time constraints. In such cases, a multi-UAV system composed of autonomous aerial vehicles is preferred instead due to their inherent ability to perform the scanning procedure in a fast and economically efficient way.
When scanning the rocket impact area with a multi-UAV system, some aircraft may fly beyond the signal range of the base station (BS) antenna. In this case, some kind of communication infrastructure is required to transmit information between the distant aircraft and the BS. The data transmission system must be capable of sending telemetry messages associated with the swept area, while also informing if any ship is found and, if so, sending an image of the target to the BS. Since the rocket impact area is offshore, that is, in the Atlantic Ocean, the communication infrastructure can be provided by the aircraft themselves by establishing a FANET among the UAVs. This work aims to develop and validate the performance of a FANET architecture. It intends to ensure the transmission of control data and images from ships located in a restricted offshore area using a network composed of ZigBee sensors embedded in a UAV squadron. The aircraft are responsible for scanning the impact area of rockets launched offshore by the CLBI so that the eventual presence of intruders is detected efficiently and reliably in a less time-consuming and low-cost approach.
Some works, for example, Nasution et al. [
22] present the design, communication protocol and testing procedure of a system for sending UAV telemetry messages to a ground control station (GCS) using ZigBee protocol. Zhou et al. [
23], Vale [
24] proposes a cooperative aerial-ground vehicular network architecture, which employs ZigBee to send telemetry messages and a Wi-Fi network to send images aiming at disaster rescue missions or area investigation. Ahn et al. [
7] designed a UAV communication protocol for Wi-Fi networks based on time division multiple access (TDMA) transmission at the network layer. Besides, due to delayed packet delivery issues, the use of a model that supports a guaranteed time slot (GTS) is suggested based on the ZigBee protocol associated with the network link layer. Bacco et al. [
25] proposed a testing platform relying on IEEE 802.15.4-based communication between UAVs for exchanging data with ground sensors to monitor and control automated crops. Braga et al. [
26] considered the use of unmanned robotic vehicles in maritime operations, where the main communication restrictions between the vehicles and mission controller are associated with long distances and/or low-power transmissions. In this context, it is reasonable to state that the aforementioned works have used Wi-Fi to transmit images, as well as ZigBee or Wi-Fi protocol to send telemetry data between the UAVs and the base station. The particular difference of the proposed study lies in the development and test of a communication protocol to be embedded in a Multi-UAV system to transmit images and information in a real-time approach from UAV to UAV (U2U) based on XBee sensors that employ ZigBee protocol. The tests are performed on quadrotors model DJI Phantom 3. The multi-UAV communication system is embedded in the aircraft by their respective manufacturer [
27], considering that the UAVs are responsible for sweeping rocket impact areas on launch missions aiming at the automatic detection of ships by aerial image processing. In offshore areas, it is not possible to use the Wi-Fi protocol due to limited area range and mobility between nodes of the aerial network.
The ZigBee protocol is used by Mushtaq et al. [
28], Min and Nam [
29] to perform fly-by-sensors (FBS) flight control with stable flight formation, while Sineglazov and Daskal [
30] propose a UAV navigation system for dense urban areas in tunnels or indoor environments. The flight planning and formation model is discussed in Lee et al. [
31], Park et al. [
32] where an effective routing protocol for navigation control and an information sharing system with onboard sensors and flight path formation algorithms are proposed for various UAVs. Popescu et al. [
18] propose an optimized trajectory design to avoid restricted regions aiming at bypassing them through close preset landmarks. This approach ensures a proper communication time to minimize the path length and discuss a method for locating and grouping sensors in an optimal coverage, also taking into account communication information between UAVs. Guillen-Perez and Cano [
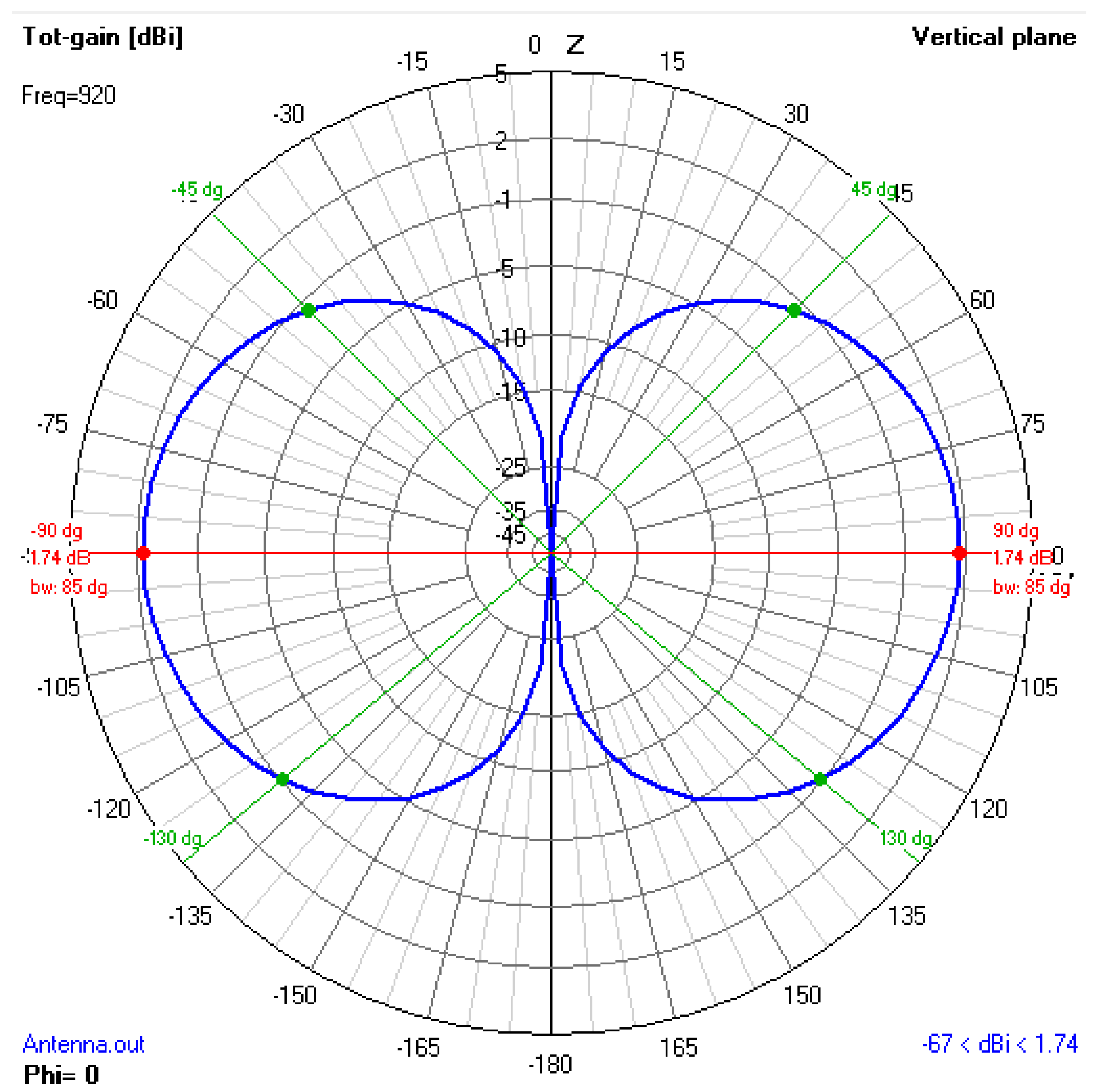
33] freview proposed mobility, positioning and propagation models for FANETs. This work highlights that the common limitation that affects such aspects is the lack of studies that assess the influence of UAVs on embedded communication devices. For this reason, it measures the impact of a UAV on the onboard Wi-Fi radiation pattern.
In this work, the aircraft used to scan the area presents a flight range of up to 20 h. Two distinct man-machine-Interface (MMI) approaches are used: remote pilot interface and operator interface (just in case of emergency). As for the communication link for flight control and navigation messages, two different link radios are used: a 100-km range very-high frequency (VHF) uplink and S-band downlink to receive telemetry data and images from a single UAV as recommended in [
20]. In order to perform U2U communication, ZigBee devices that work with an operating frequency of less than S-Band were chosen so that the signal suffers fewer attenuation effects and low manufacturing cost is obtained.
The main contribution of this paper can be summarized as follows:
Based on the analysis of the various possible configurations of the communication network and the specific features to perform the area scan over the sea, an appropriate architecture is proposed for this particular application based on devices that support IEEE 802.15.4 standard and ZigBee communication protocol. This solution is capable of sending telemetry data and images between the UAVs using a FANET;
A communication protocol is proposed for a FANET operating in the maritime area, being capable of transmitting telemetry images and data. Due to the particularities of the scenario and involved application, XBee Pro 900HP S3B sensors were adopted. Besides, the system meets the following requirements:
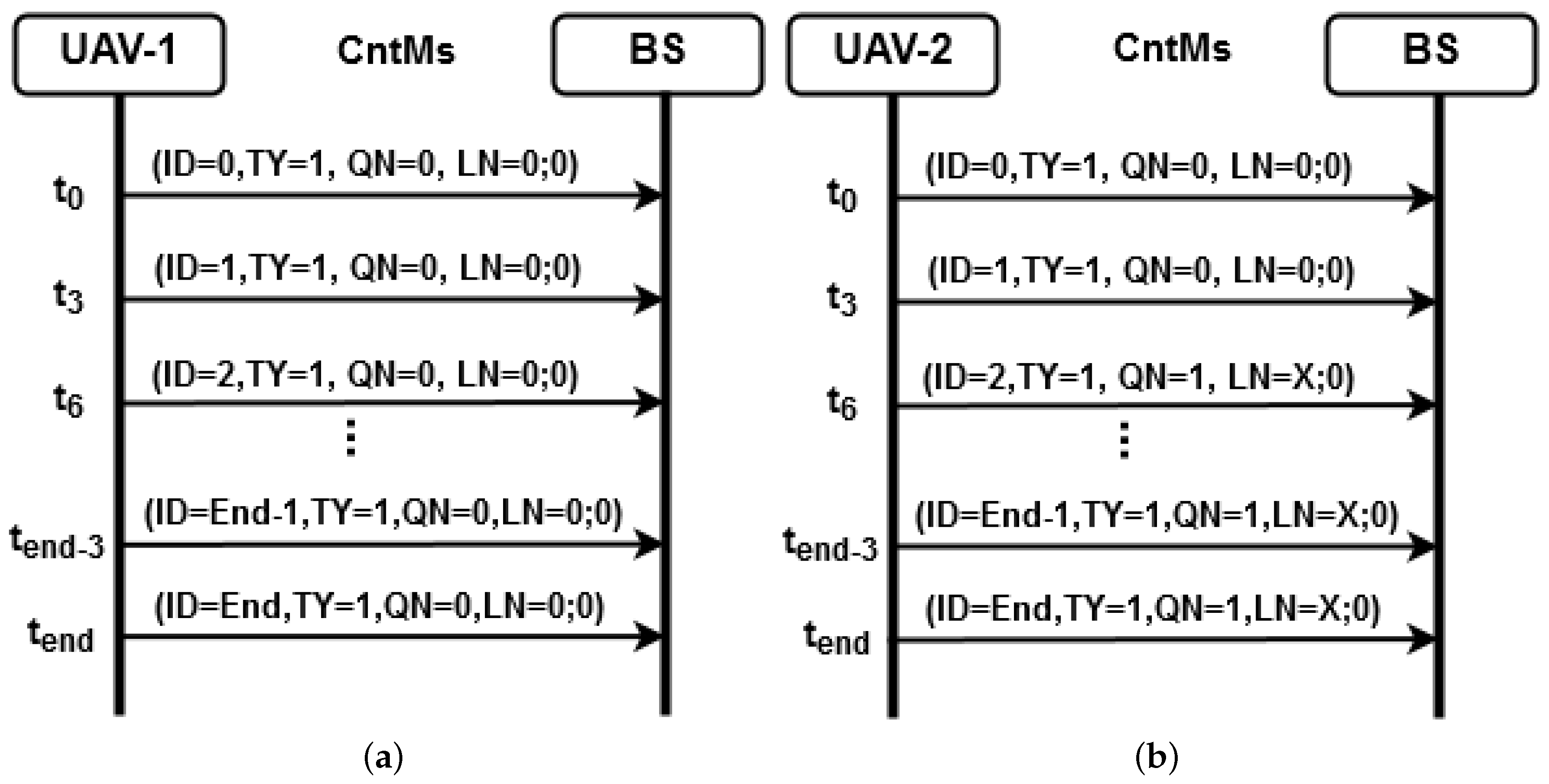
The UAVs send telemetry data on the scanned area and target locations periodically using control messages.
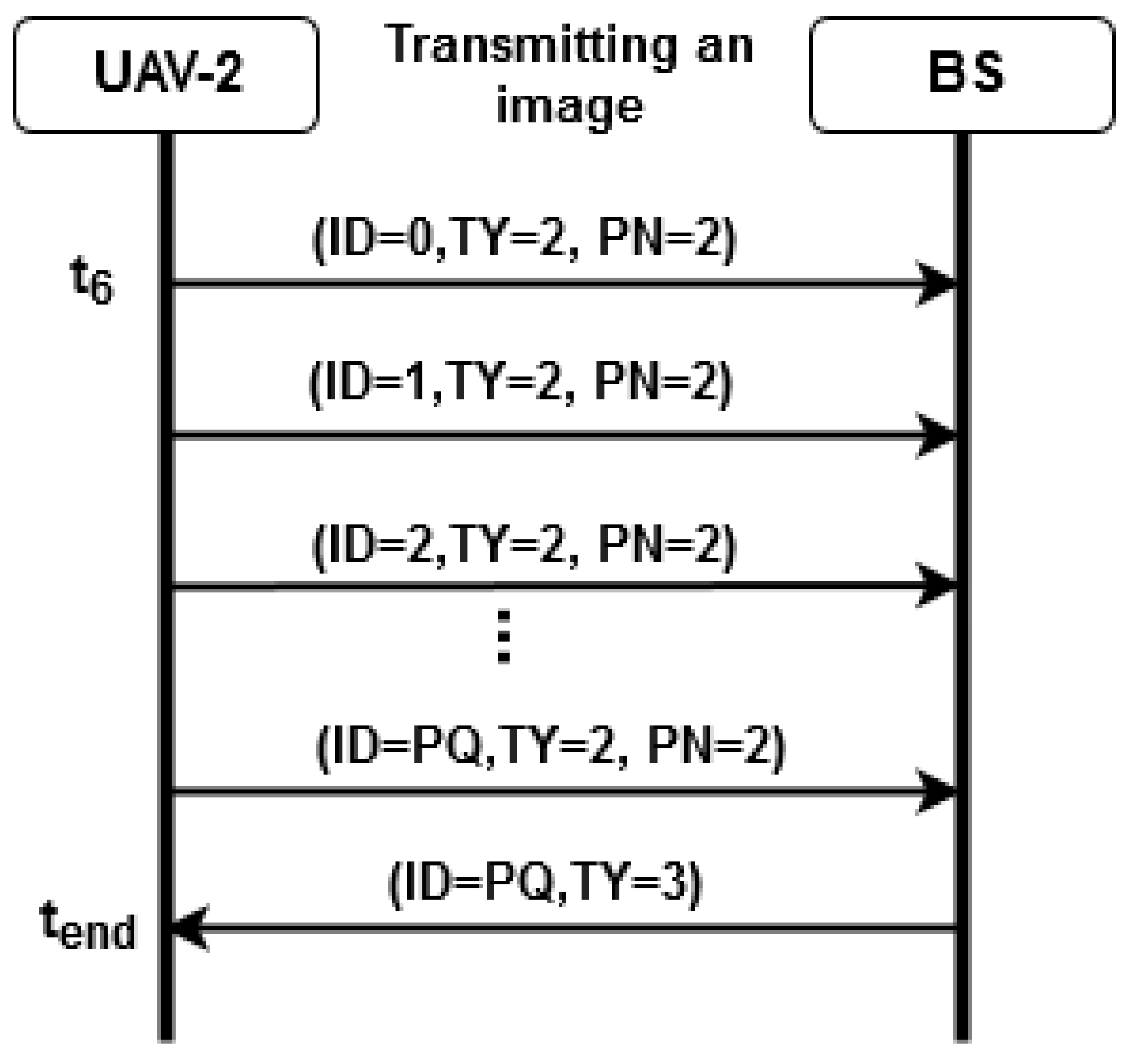
If the image system embedded in a UAV locates a target, the communication system must send the image to the HUB node through the FANET, which sends it to the GCS. Due to the restrictions of the offshore area and the payload of XBee sensors, it is necessary to fragment the image, send the packets in fragments, perform the control of the image reception and, if necessary, request the retransmission of some lost packet. For this purpose, data and confirmation messages are employed. Thus, the GCS confirms to the UAV through a message that the image was received.
The communication protocol was validated by assessing different scenarios and controlled environments. The first scenario validates the wireless sensor network (WSN) throughput on a mesh network. The purpose is to check whether ZigBee sensors meet image system requirements to send messages according to the time required to sweep the area. The second scenario assesses the fault tolerance capacity of the ad hoc network to reorganize itself into a multi-UAV system. If an intermediate node fails, the network reconfigures itself by finding new routes in the FANET in all test conditions;
Simulation tests were performed to define a position for which the aircraft structure influences as little as possible the electromagnetic propagation of the antenna used by XBee sensors. The omnidirectional aspect of the antenna is then maintained and the surrounding UAVs will have nearly the same signal strength if the distances are equal;
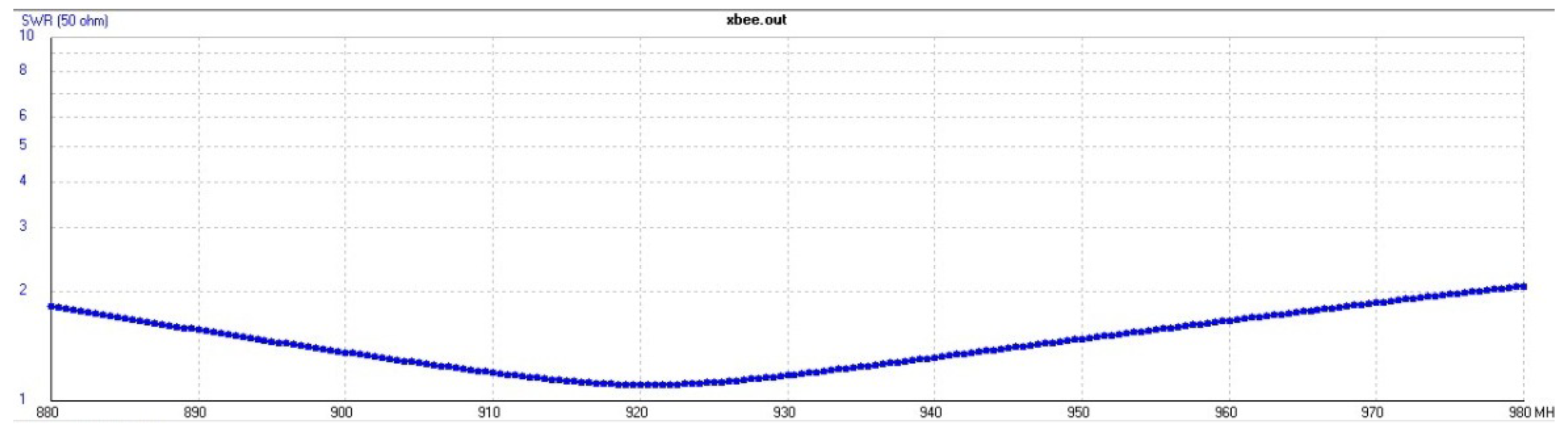
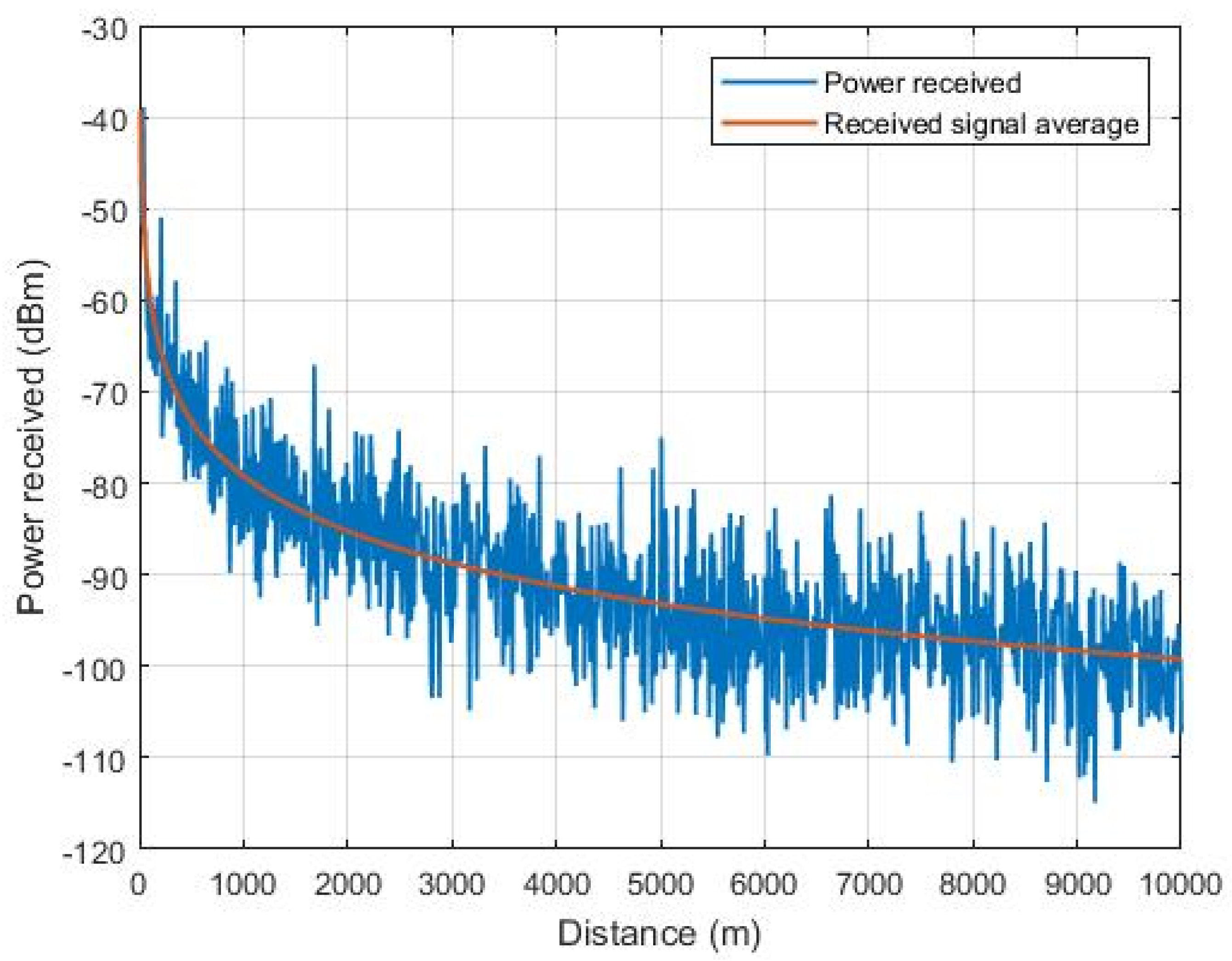
A channel based on Rice propagation model using line-of-sight (LOS) was analyzed by simulation employing a synthetic signal associated with XBee devices to define how farther one aircraft can stay away from another while maintaining minimum QoS, that is, to ensure that the signal strength at reception has a power exceeding −100 dBm;
Tests were performed in a controlled environment to transmit images between the multi-UAV network and the base station, where the image is split into multiple packets. To simulate the tests, XBee sensors embedded in the UAV model DJI Phantom 3 are employed.
A preliminary version of this work was published as a conference paper in [
34]. The present extended version of this study includes the area scan strategies detailed as follows. In order to compare them properly and define an appropriate architecture for the application, an analysis of possible network characteristics for multi-UAV systems is carried out. A detailed description of a FANET developed for a multi-UAV system can then be applied to the detection of intruder boats in the predicted impact area of suborbital rockets launched from the CLBI. In this context, the scanning procedure can be performed in an efficient and reliable manner, thus reducing cost and time.
The remainder of this paper is organized as follows.
Section 2 presents the main characteristics of multi-UAV communication systems. The scanning strategies are presented and discussed in
Section 3.
Section 4 describes the multi-UAV system, the image processing system, as well as the proposed network architecture for the addressed application in terms of the software and hardware required to support the network. The scenarios for which the tests are carried out are described in
Section 5.
Section 6 presents the results of tests performed on a data transmission network with ZigBee devices. The main conclusions are given in
Section 7.
3. Strategies for Scanning the Impact Area
Due to security issues, for every ballistic rocket launched towards the sea, a foreseen impact point and trajectory are determined in order to establish an exclusion area both in the air and sea where there is a significant probability of impact. In this section, two scanning strategies are proposed for a multi-UAV system aiming at the exclusion area surveillance in such a way that the area can be checked while ensuring both minimal energy consumption of the UAVs, as well as stability and reliability of the network connecting the aircrafts.
When establishing the appropriate scanning strategy, there are some aspects regarding the scanning purpose that must be taken into account. For instance, one of such requirements may include providing an aerial image of the entire scanning area. Therefore camera aperture, altitude and flight speed are key examples of relevant parameters for planning the mission. Besides the aspects that are inherent to the task to be executed, there are also other important considerations related to the resources required for executing the mission. Thus, a good scanning strategy should define routes that ensure minimal energy consumption in order to provide maximum flight autonomy, as well as keep the aircrafts in close proximity to ensure a stable communication link between them, which further minimizes the probability of failure.
For the specific application analyzed in this paper, the impact area may vary from a few to hundreds of square kilometers and, depending on the rocket itself, the area of impact can be located close to the coast or a few hundred kilometers offshore. In this scenario, the group of UAVs to be assigned to the mission should be as small as possible to ensure at least four hours of flight autonomy. At least one of the aircrafts must be capable of keeping a reliable communication link with the required bandwidth and also the ability to communicate with the BS from any point in the impact area.
When the area to be covered is small, a single UAV can be assigned to the mission [
21]. In this case, two simple strategies are found in the reference literature: spiral and back-and-forth methods [
44].
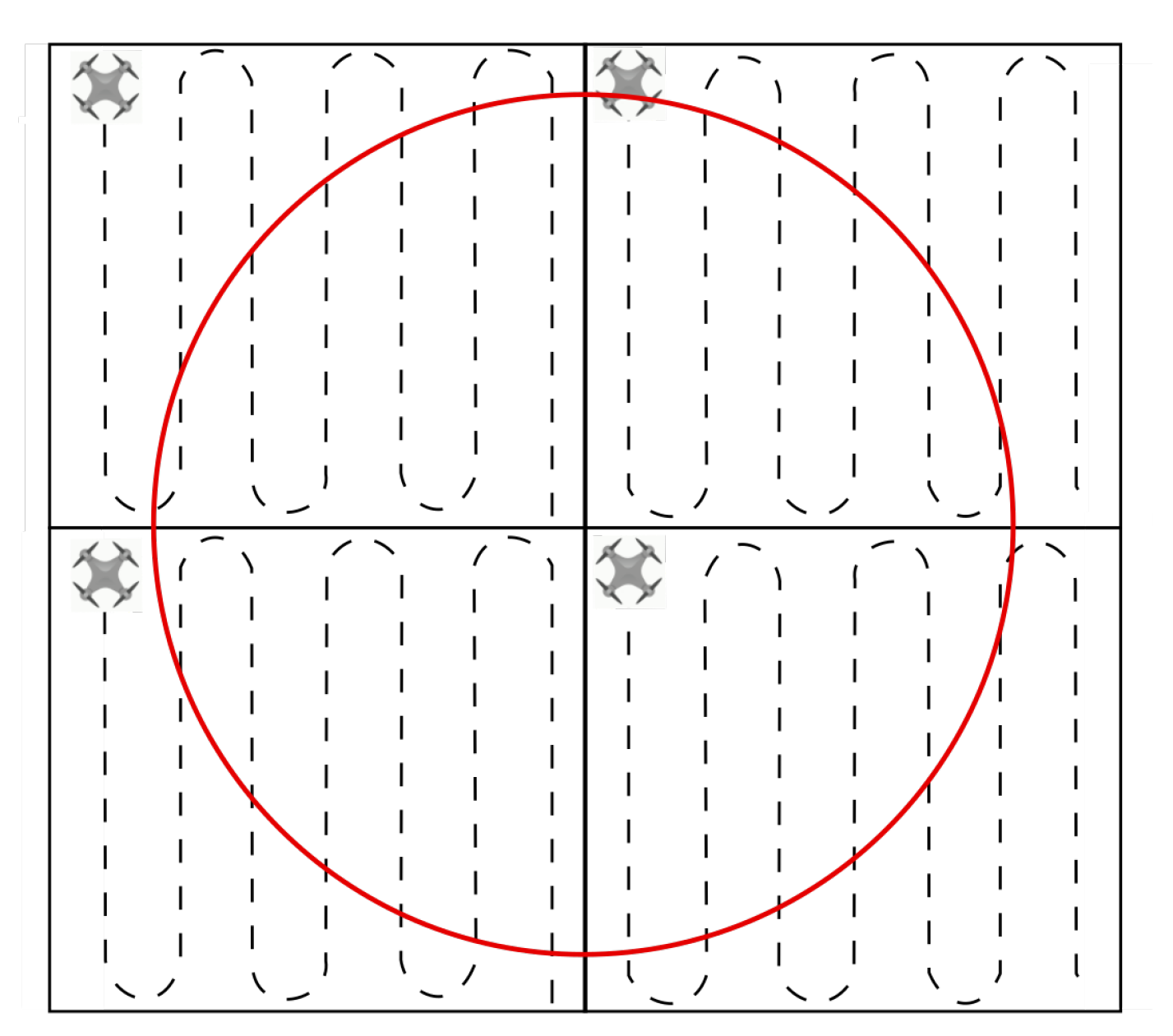
3.1. Scanning Strategy Using Multi-UAV System without Area Decomposition
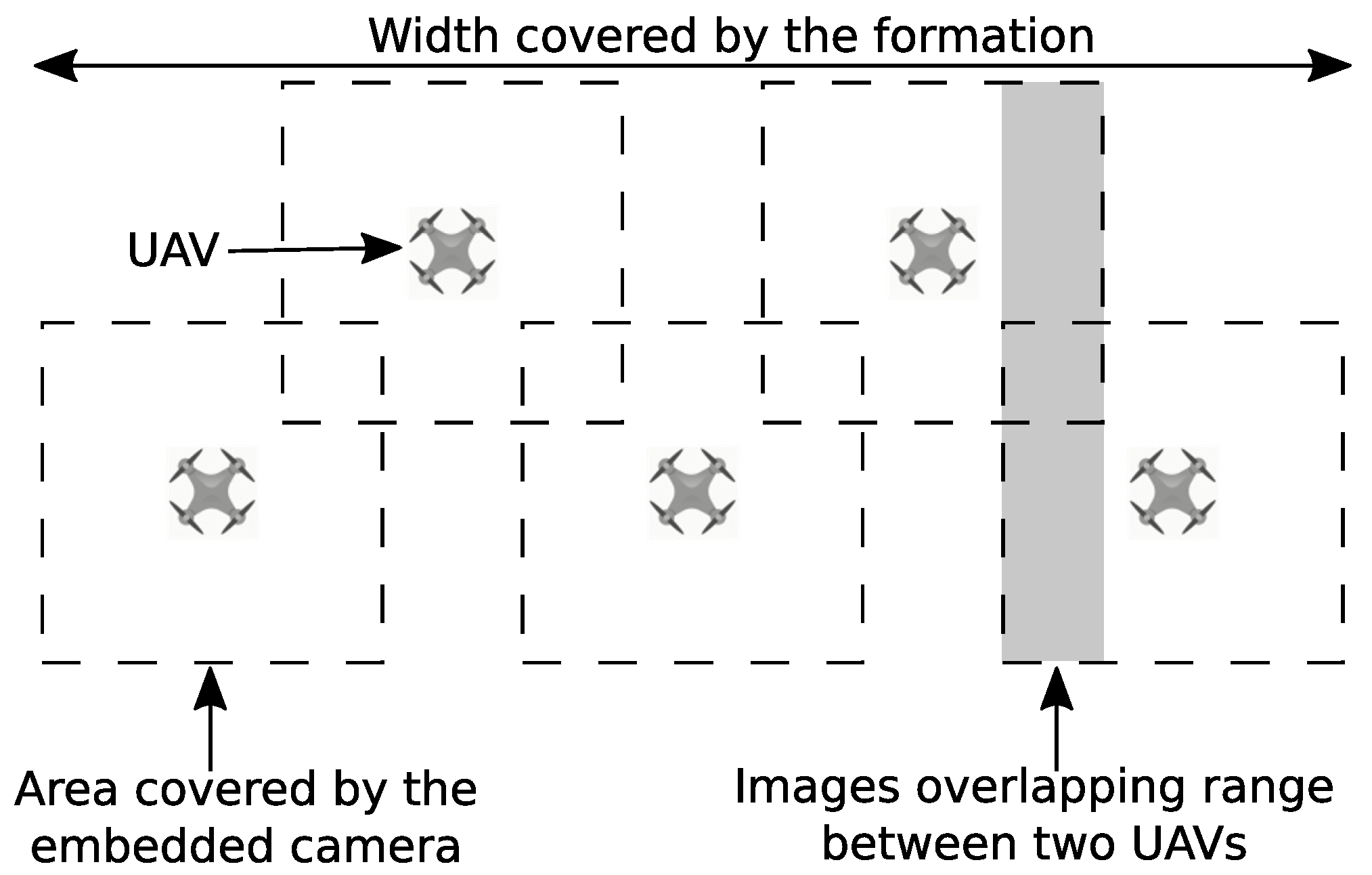
In the strategy proposed in this work, the UAVs should fly information in a side-by-side approach, while scanning the area as shown in
Figure 3. In this scenario, the UAVs maintain the same distance between each other. The images are acquired periodically as a mosaic, which has the size of the coverage area of the camera embedded on the aircrafts times the number of UAVs in the network. Thus, it is possible to estimate the area shared between neighbors due to the overlapping, which is necessary to ensure that the impact area is properly scanned. In this scanning strategy, the distance between the two UAVs is determined to ensure the correct image superposition, which depends on the camera aperture and flight altitude. This kind of formation eliminated redundant links and, typically, the distance between two neighboring UAVs is shorter than the maximum range for the communication system embedded on the aircrafts. Therefore, this method will tend to provide more reliable communication.
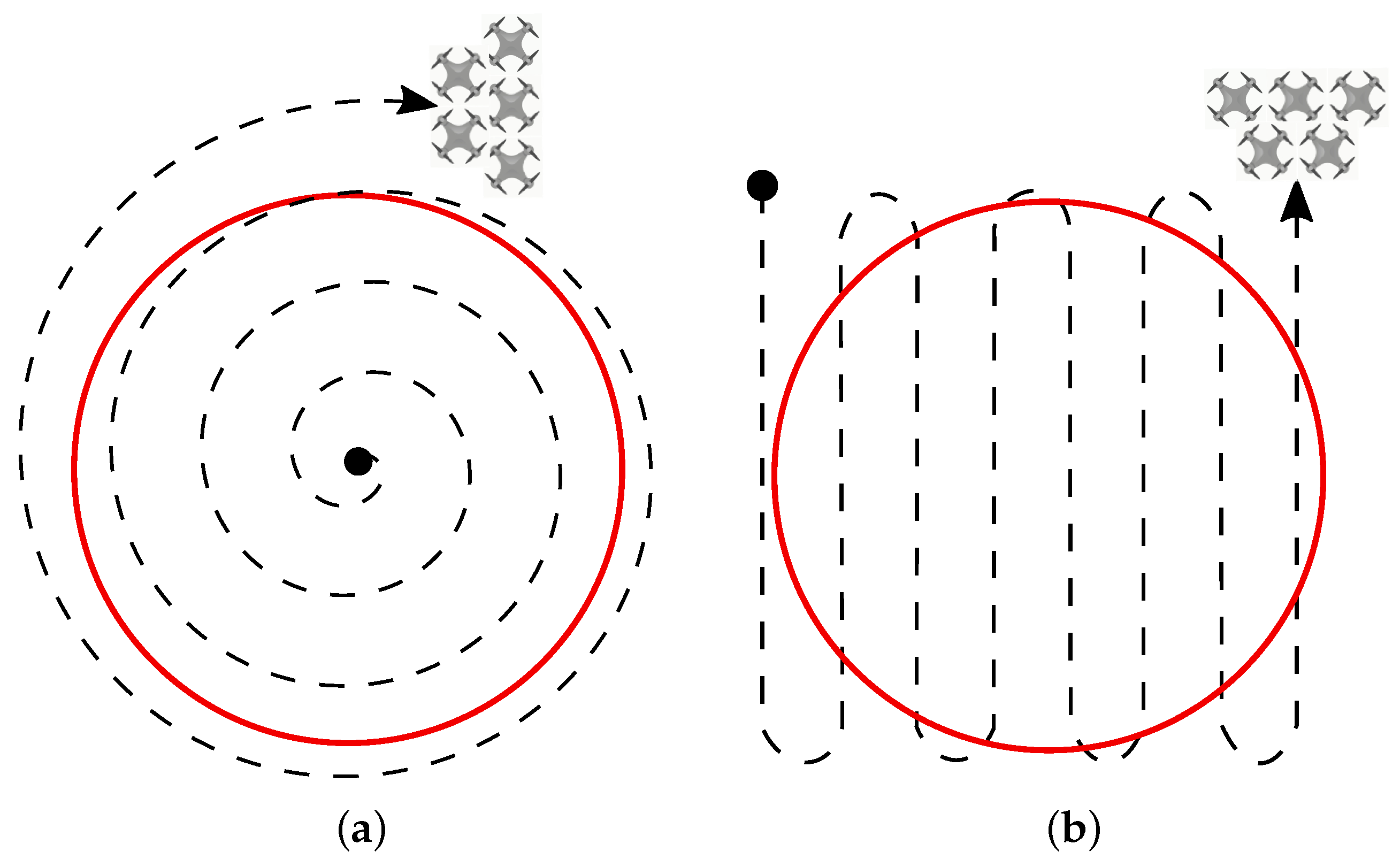
Applying the algorithm for spiral scanning as described by Öst [
44], it is possible to keep the UAVs in the formation and as close to each other as possible. An alternative to the strategy lies in the back-and-forth methodology, where the inversion occurs in both directions, resulting in almost the same trajectories for all nodes. The spiral and back-and-forth methods are shown in
Figure 4a,b respectively.
Fully scanning an area while maintaining all UAVs in a fixed formation is useful for situations where the processing speed and time for mission completion are the main factors to be considered. In this case, at least one UAV capable of maintaining a reliable communication link with the base station throughout the whole scanning area is a mandatory requirement. Moreover, the communication link must ensure that there is enough bandwidth to intermediate the communication between other nodes with the base station. In this manner, the network can be established using the node with the widest range as a hub for the neighbors that are unable to communicate directly with the base station. In the case of a node failure, the neighboring nodes must reorganize themselves to maintain the formation. If a single node has the requirement to work as a hub, its failure will compromise the whole system as a consequence. Thus, it is recommended to use more than one hub in the network to provide redundancy and mitigate failure.
3.2. Scanning Strategy Using Multi-UAV System with Area Decomposition
When the communication between the base station and the farthest node becomes unreliable due to distance, the solution is to subdivide the scanning area into subareas and assign each one of them a UAV, thus establishing a mesh network among the aircrafts. This allows the information to jump from one node to another until it reaches the destination, for example, the base station.
Figure 5 represents the aforementioned method, which leads the system range to increase. Although the aircraft is distant, it can be coordinated in a synchronous flight formation when using a strategy that scans subareas with the same size. The size of each subarea must be defined so that each UAV has a reliable communication link with its neighboring units.
A relevant aspect of this application is that obstacles do not exist within the scanning area since the aircrafts travel over the sea, thus simplifying the trajectory planning. When one of the nodes fails, areas that have already been scanned should not be rescanned. In the case of a node failure, the method proposed by Marro and Goncalves [
45] could be adopted to subdivide the unscanned area into new subareas, also taking into account the spaces that have been scanned so far. Yet there is the need for an algorithm capable of forwarding data packets among all UAVs in the system to the base station in a reliable manner, thus ensuring that the communication remains established.
3.3. Comparative Analyses among Scanning Strategies Using Multi-UAV Systems
In order to determine which strategy provides the shortest scanning time for the area of impact, while simultaneously ensuring a reliable network for exchanging data among UAVs and base station, both proposed strategies will be compared as detailed in
Table 1.
For both of them, the scanning time is proportional to the number of UAVs assigned to the mission. The maximum size for the searched area when the subdivision is not applied is restricted by the range of the node that is leveraged as the hub. When subdivisions are applied, the size of the scanning area can be larger than that in the first scenario, since the information can be routed from a distant aircraft to the base station through a mesh network. Data is sent from one node to another until it reaches its final destination. When the area is not subdivided, the system relies on a dedicated and robust link that connects the hub to the base station. The remaining UAVs communicate with the hub node through a network configured in a star topology coordinated by the hub. Alternatively, in order to increase the reach, it is possible to establish a mesh network among some of the nodes if they are not able to communicate directly with the hub.
In the scanning method without subdivision, since the nodes are close to each other, the required time interval for reorganizing the network is shorter when one node fails, where the formation is simply reorganized. Besides, the energy consumption due to signal transmission is reduced in this case, implying the extension of the system’s lifespan. When a subdivision is used instead, as the nodes are farther from each other and, if failure happens to occur, the unscanned area must be divided again among the remaining nodes. Due to the greater distance between nodes, more power will be required by the communication system.
Considering the network behavior for each proposed strategy, as well as the specific characteristics of the addressed application where few nodes are available, a scanning strategy without subdivision was adopted at the first moment. This is due to the limited number of available UAVs embedded with a robust and long-range communication system. Based on the chosen strategy, it is possible to plan a set of experiments and establish metrics in order to measure network parameters, such as the received signal strength indicator (RSSI), latency, transmission rate, packet loss rate, jitter and network overhead, aiming at analyzing the network performance in terms of reliability and capacity of reorganization when adding or removing nodes.
5. Description of the Scenarios for FANET Test
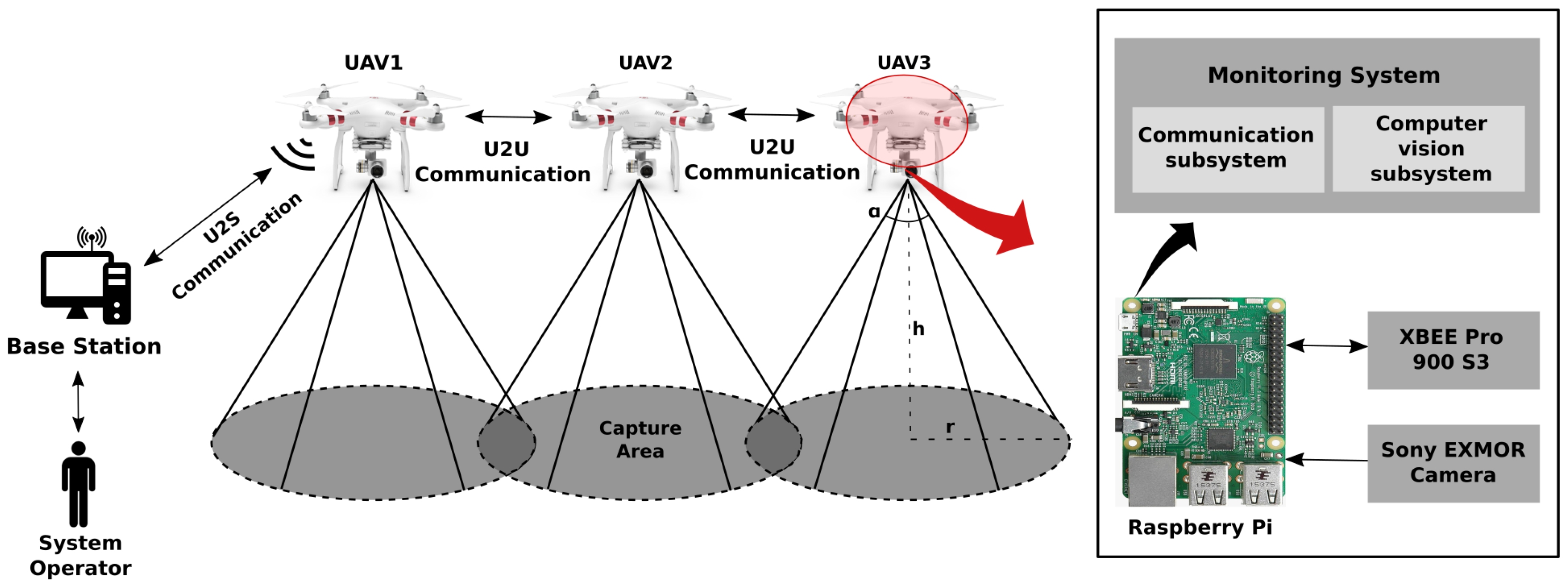
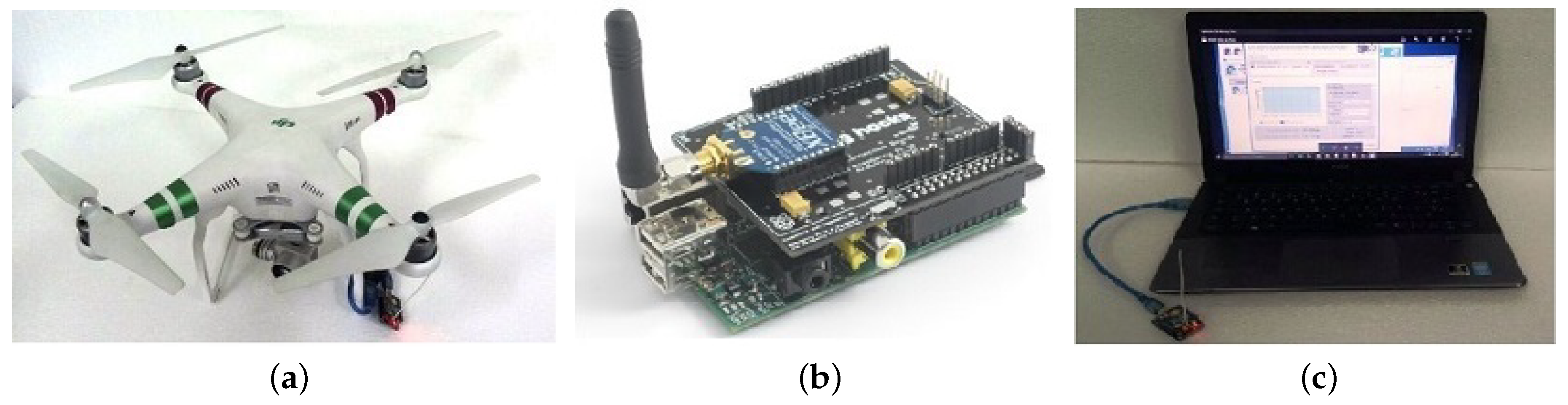
In order to evaluate the network performance in the multi-UAV system, a squadron of quadrotors and a BS were assembled. Some modules were embedded in UAV: an XBee Pro 900HPS3B module connected to an XBee Explorer USB module and a power module (Power Bank). The BS is composed of a laptop with communication and test software, while the XBee module is connected to the XBee Explorer USB module.
During the performed tests, the information is transmitted from the FANET to BS. A laptop performs U2S communication, being responsible for collecting data on the performed simulations. In the multi-UAV system used in CLBI, this node assumes the function of the UAV hub. While the BS corresponds to the GCS in the tests, the UAV hub connects the GCS to the network composed of aircrafts when scanning the rocket impact area.
The spiral scanning strategy with constant flight speed was adopted without considering area division. The distance for which the nodes have reliable communication was defined through simulation of the maximum range between UAVs. The tests allowed to analyze the time interval required to reorganize the network in case of node loss were analyzed. For this purpose, the latency, transfer rate, received packet rate and signal strength during data transmission was compared in several scenarios.
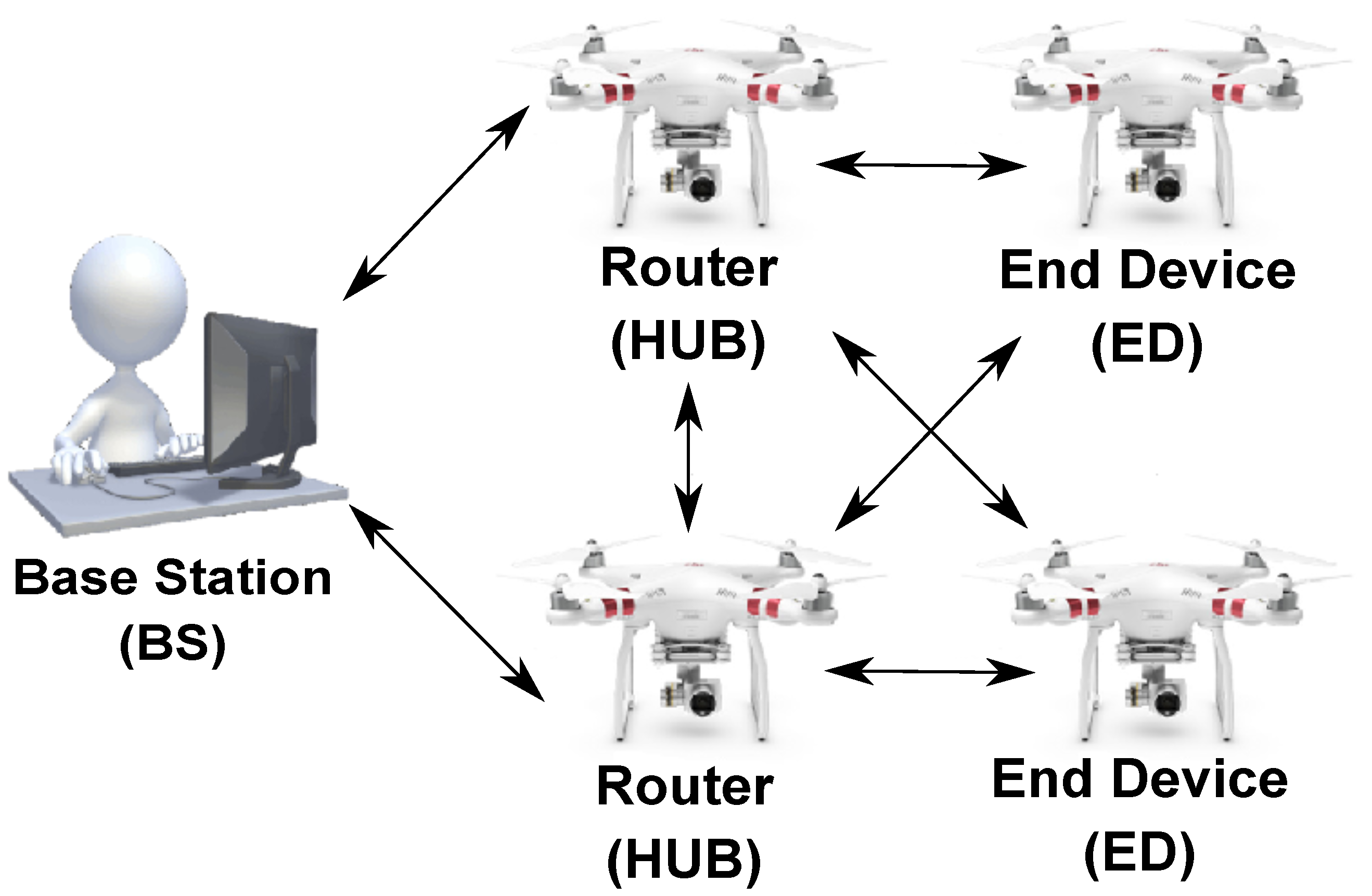
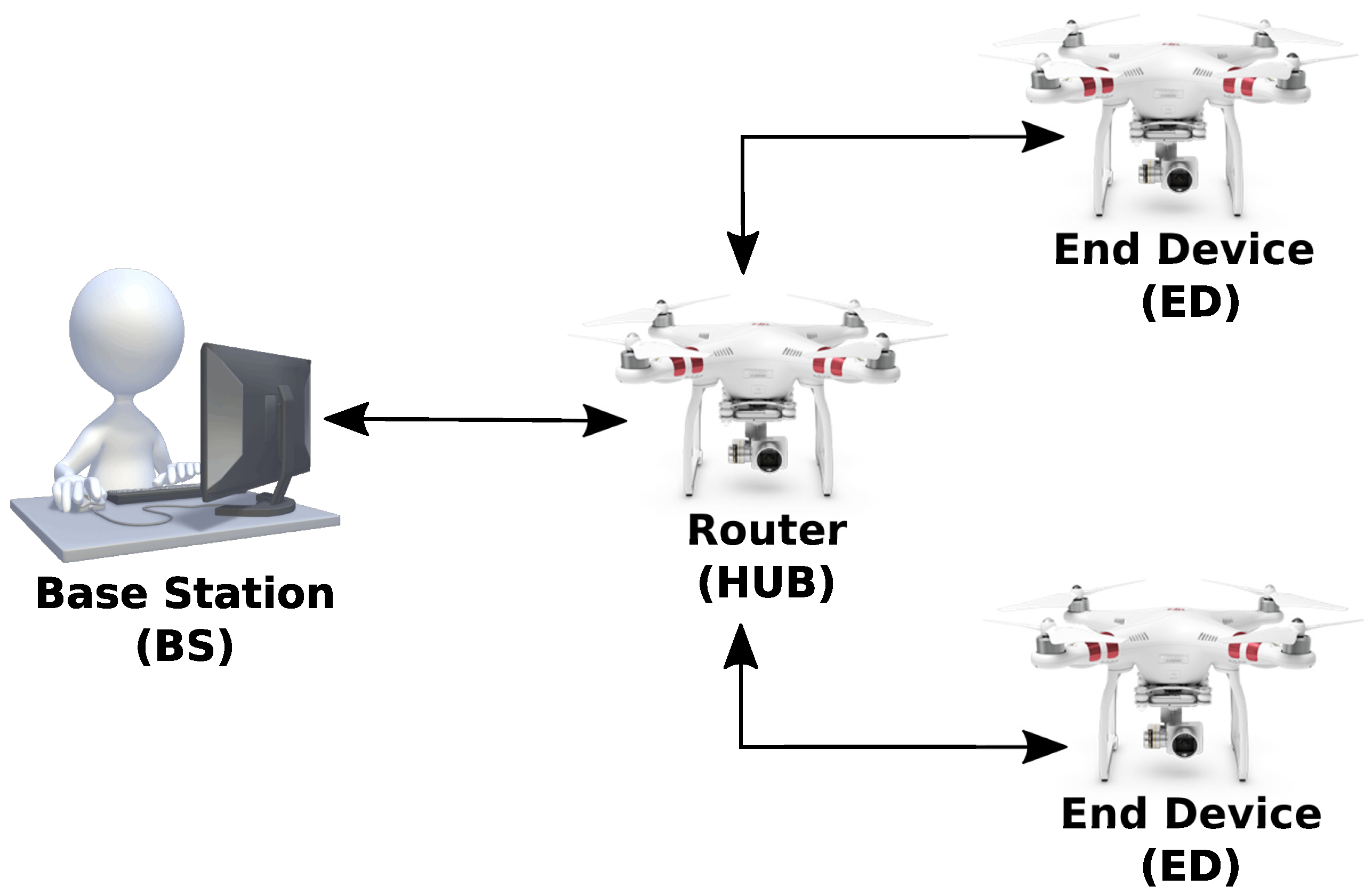
The exchange of messages between the BS, which is referred to as ZigBee Coordinator Node (CN) and the HUB UAV constitutes a peer-to-peer network. The XBee modules in the UAVs are configured as ZigBee routers (HUB) and ZigBee End Device (ED), corresponding to a mesh network capable of sending data to the coordinator node which is responsible for forwarding messages from the squadron to the BS and vice-versa, shown in
Figure 11. The objective is to evaluate the performance and reliability of the network through data transmission tests, as well as the reconfiguration capability case of the HUB node failure.
X-CTU
® free software was used for network management and monitoring [
51]. The test and analysis of performance metrics, for example, RSSI, delay time (latency), transmission rate (link speed) packet loss rate and overhead were executed. The transmission of CtlMs and DMs with known and fixed size can then be simulated. Data transmitted in the network can be properly controlled, avoiding packet fragmentation in lower layers.
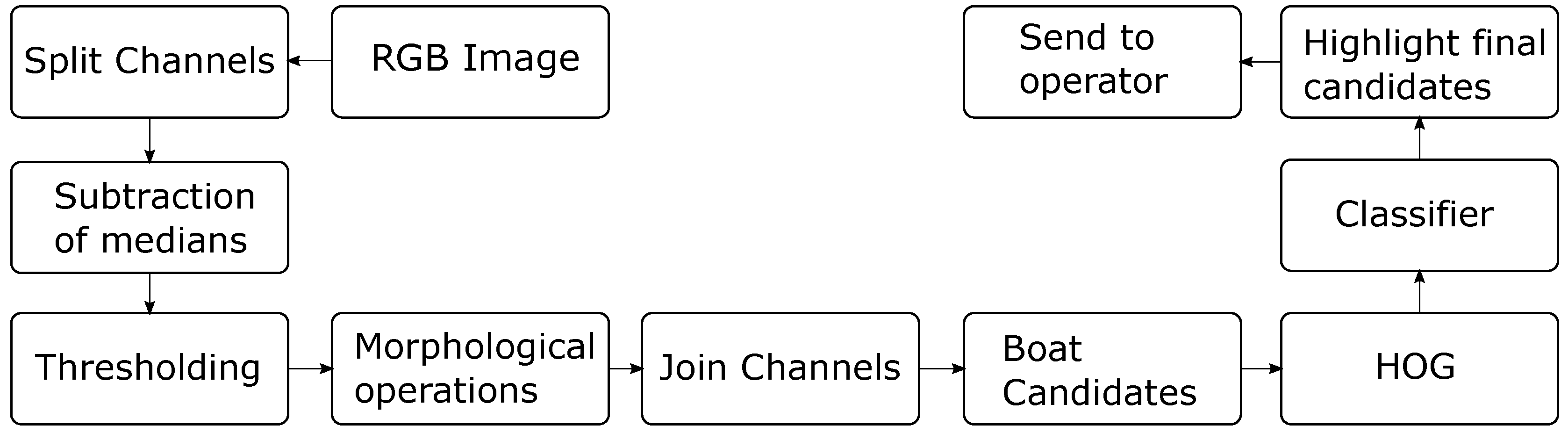
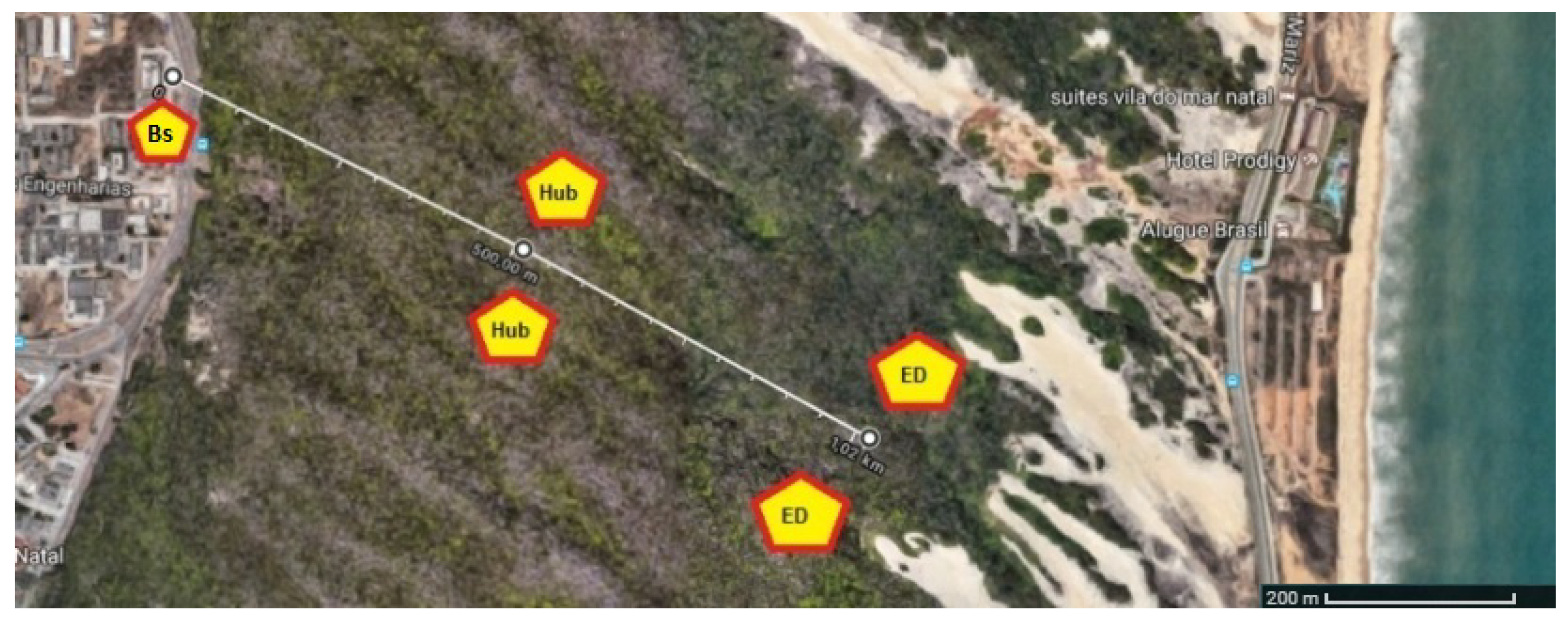
The tests were performed with the BS located at the central campus of the Federal University of Rio Grande do Norte, Natal, Brazil, while the UAVs traveled over the sand dune park in Natal, which is a region with a constant wind regime and almost no electromagnetic interference. The tests were executed late in the afternoon during periods with few clouds. Messages were sent with different transmission rates within the limit supported by XBee. In order to simulate the transmission, a 100-kB image was used to detect boats as described in Santos et al. [
20], where 500 packets of 256 bytes were transmitted.
Figure 12 shows the test site.
5.1. Scenario 1—Baud Rate of 115,200 bps
This scenario simulates the situation where a boat is found by a FANET node. There is no failure of any node. In order to validate the network operation, 500 packets of 256 bytes were sent. This procedure was repeated 72 times with the aim to calculate the mean and standard deviation of the samples. Packet sending time, packet loss, signal strength (RSSI) and throughput were obtained.
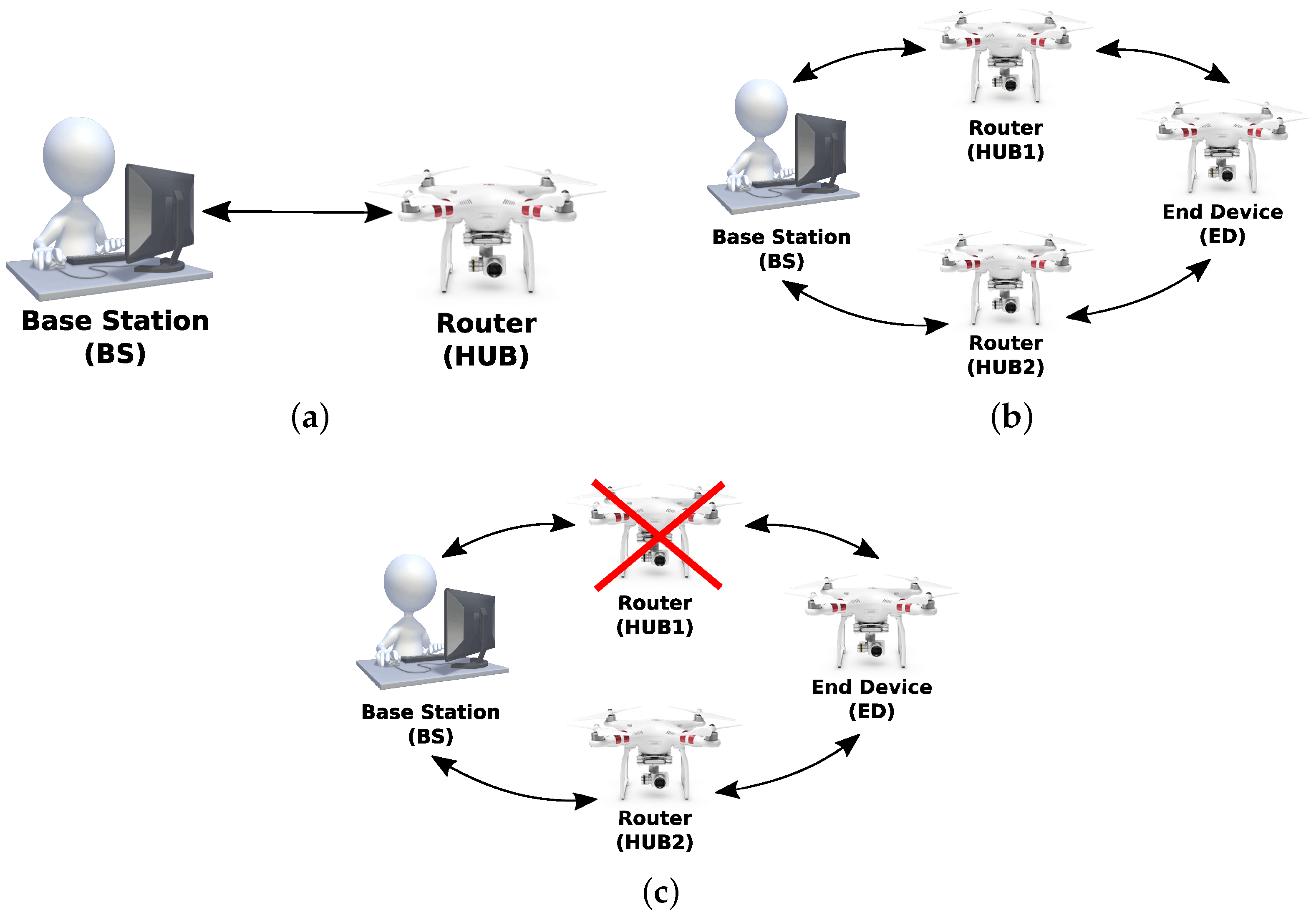
In this configuration shown in
Figure 13, the BS and the network coordinator were on the ground. The first UAV was added to the network as a router (HUB), flying at a height of 80 m from the ground. Its respective position carried from 400 m to 600 m away from the BS. The second UAV was added as an end device, flying at a height of 80 m from the ground, with the position varying between 900 m and 1100 m from the BS. The baud rate for all XBee modules was set at 115,200 bps as listed in
Table 5.
5.2. Scenario 2—Baud Rates of 38,800 bps and 115,200 bps
According to
Figure 14, this scenario simulates the situation where a HUB node fails and exits the network during the transmission of image data, forcing the nodes to be reorganized, searching for an alternate route (i.e., another hub) to continue the packet transmission between the ED and the BS. The XBee Modules were configured in such a way that the ED did not have a direct link to the BS. Thus, the transmitted packets always hop through a HUB. In this configuration, when the HUB is deactivated, the ED must find an alternative route through another HUB to send packets, since it is not able to transmit packets directly to the BS, that is, without the hop. In order to simulate this scenario, the baud rates of the ED and BS were set to 38,800 bps, while the baud rate of the HUBs was 115,200 bps.
In this new arrangement, the coordinator was on the ground again. However, in this case, two UAVs work as routers (HUBs) maintaining their formation close to each other. The first and second UAVs flew at altitudes of 70 m and 80 m, respectively, with a distance varying from 400 to 600 m from the BS. A third UAV (ED) was added to the network as the end device, flying 80 m high and distant 900 to 1110 m from the BS. This condition is described in
Table 6.
7. Conclusions and Future Work
This work has presented results on the specification of a communication network architecture for a multi-UAV system for scanning the impact area of rockets launched from CLBI in order to detect invasive boats in an exclusion zone established during the launch chronology. The main features of the mobile FANETs have been properly addressed. Despite recent advances in studies regarding communication networks applied to multi-UAV systems, it has been demonstrated that there is no general network architecture that meets the requirements and characteristics of all existing applications.
In the specific case of applications associated with scanning the rocket impact area, which have very specific characteristics such as propagation and attenuation of radiofrequency signals on the sea surface, the challenge is even greater. A hardware and software architecture to support the communication network is currently incorporated into a squadron. With such infrastructure, experimental tests will be carried out to validate the proposed approach.
Tests were performed using the scanning strategy without area decomposition. In order to validate the proposed strategy, a network architecture based on ZigBee technology was defined. For this purpose, different scenarios and configurations were adopted to analyze the network performance when transmitting a 100-kB image. The network presented stable behavior while transmitting the image with a baud rate of 115,200 bps within an average time interval of 67 s. During 100% on the test where the failure occurred, the results clearly denote that the network is capable of reorganizing itself and maintaining data transmission with success rates higher than 99%. Since in such type of application the FANET is required to transmit an image with reliable data to confirm the detection of a boat even when data transmission fault occurred, the experiments carried out in this work allow concluding that the network is a reliable fault-tolerant, fulfilling the necessary requirements satisfactorily.
The next steps of the project include additional tests to increase the amount of data, as well as the development of a hardware and software architecture associated with interpixel redundancy for image reconstruction in cases of packet loss.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}