Continuous Dynamics Monitoring of Multi-Lake Water Extent Using a Spatial and Temporal Adaptive Fusion Method Based on Two Sets of MODIS Products


 ,
,
Abstract
1. Introduction
2. Case Study Areas and Materials
2.1. Case Study Areas
2.2. Materials
2.2.1. MODIS Datasets
2.2.2. ASTER GDEM Data
2.2.3. Validation Data
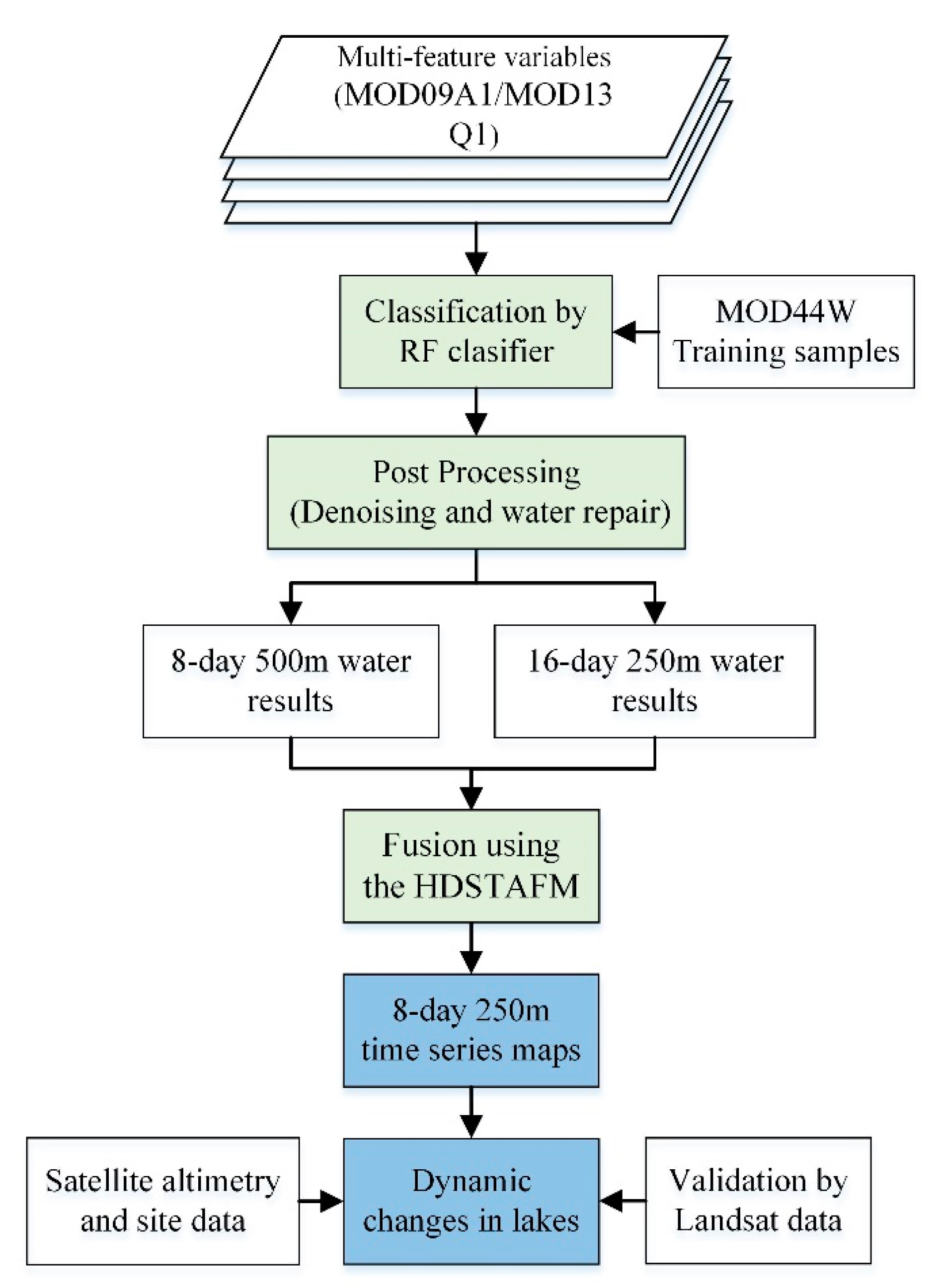
3. Methods
3.1. Water Preliminary Classification
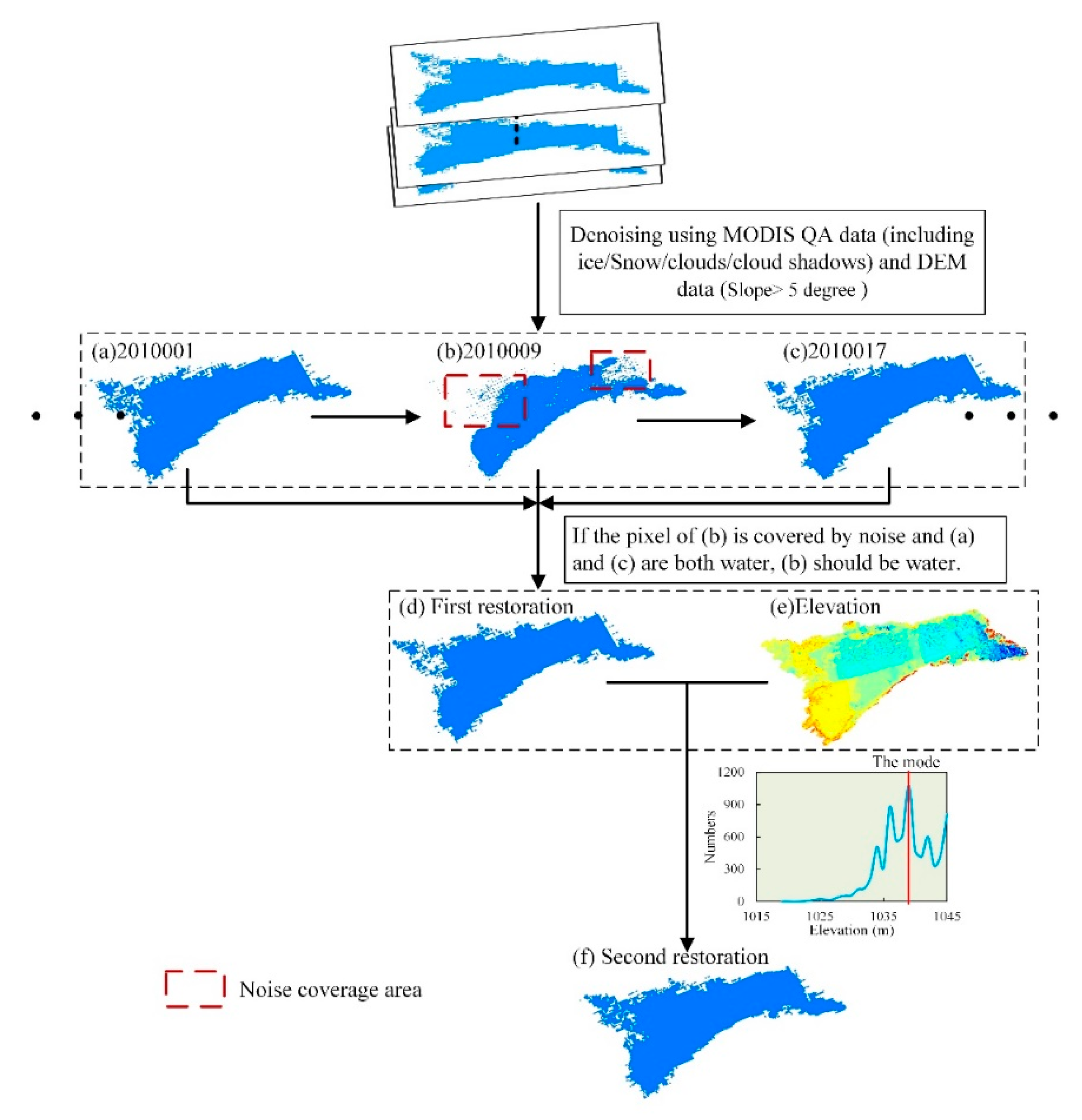
3.2. Post-Processing
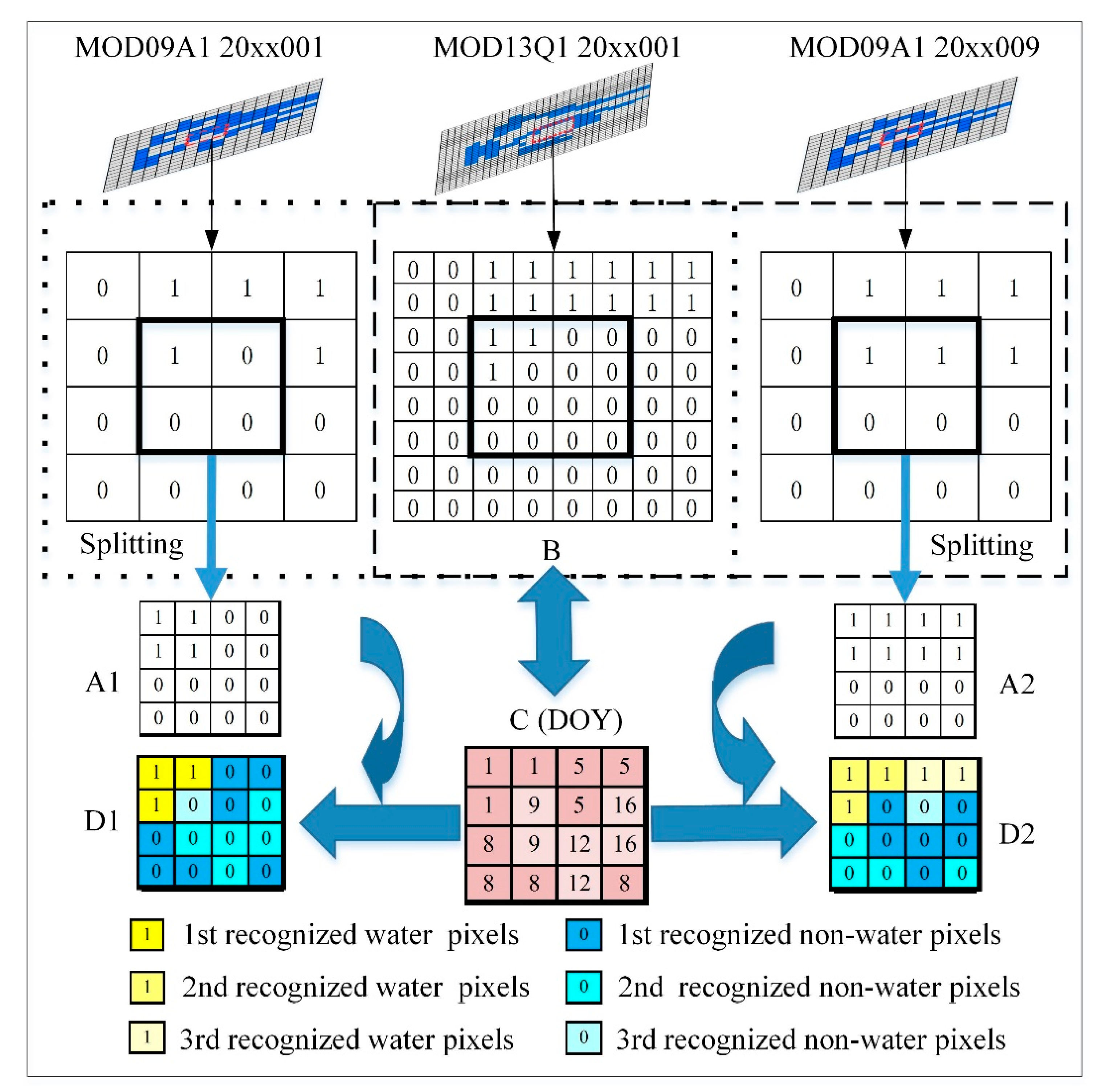
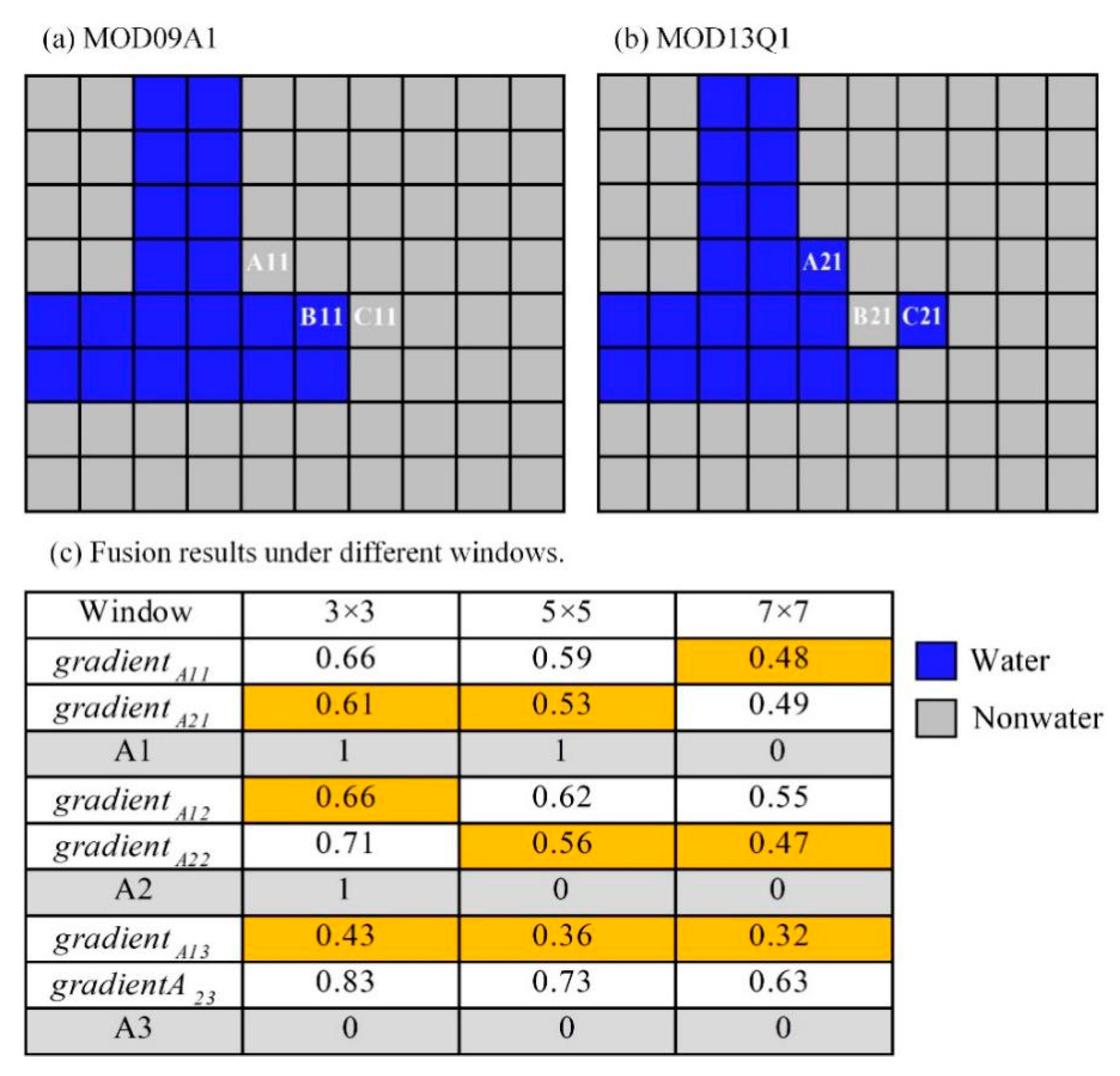
3.3. The Homologous Data-Based Spatial and Temporal Adaptive Fusion Method
- First step: If 1 ≤ C < 9: We consider B as accurate, and D1 is assigned to B if the case is the following: The result from MOD13Q1 (that is the 16-day optimal value with 250 m resolution) is more accurate than the one obtained from MOD09A1 (that is the eight-day optimal value with 500 m resolution).
- Second step: Ιf 9 ≤ C < 17 and A1 = B, this means that the two classification results are consistent, and D1 can be assigned either to A1 or B.
- Third step: If 9 ≤ C < 17 and A1 ≠ B, we need to compare their correlation with the surrounding pixels to determine the final result. A gradient equation is being proposed in this study (Equation (1)). Comparing the gradient values of A1 and B, if , the correlation between A1 and the surrounding pixels in the window can be considered more reasonable than B, so D1 = A1; otherwise D1 = B.
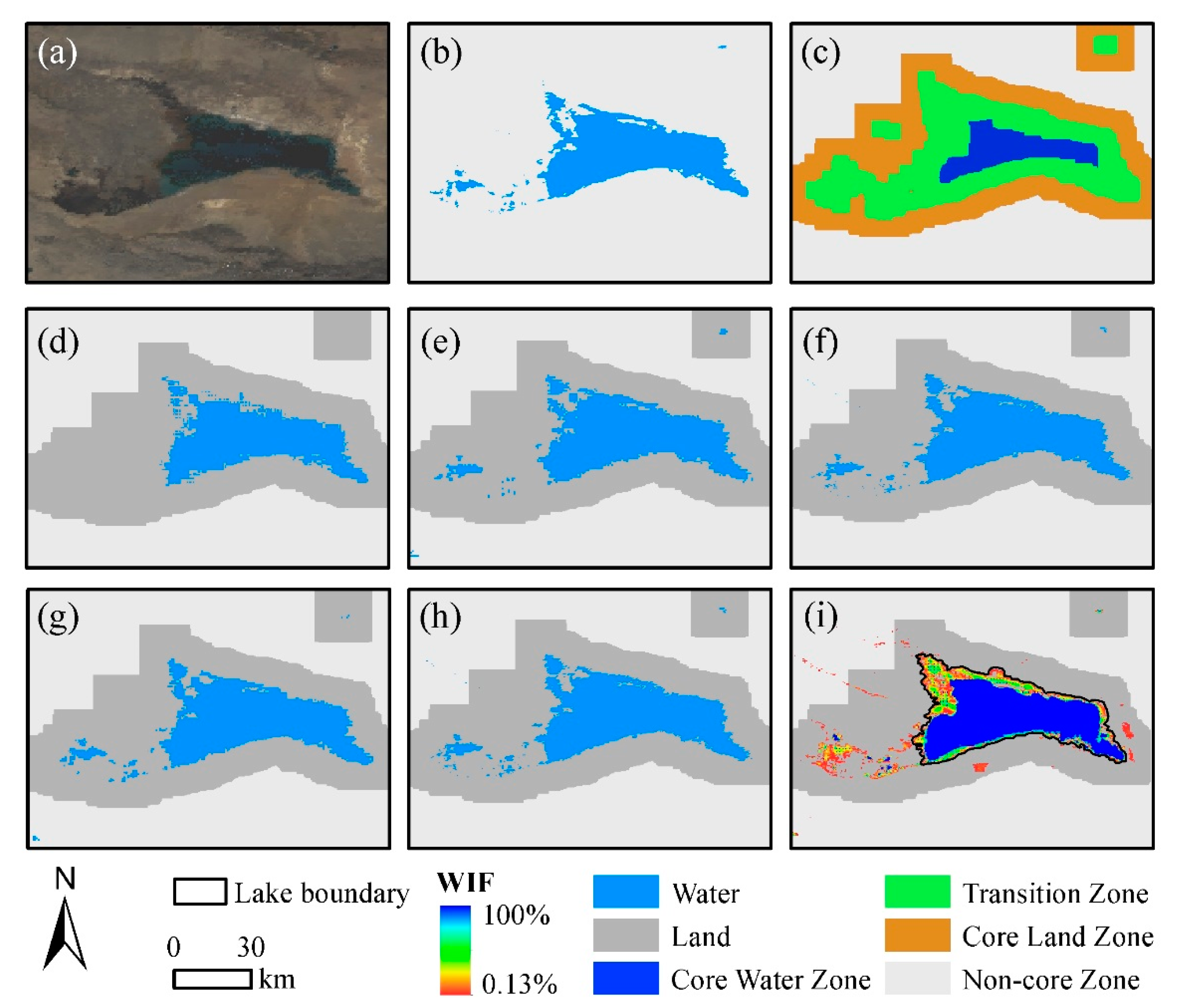
3.4. Accuracy Assessment
4. Results
4.1. Comparison of the Results and Accuracy Assessment
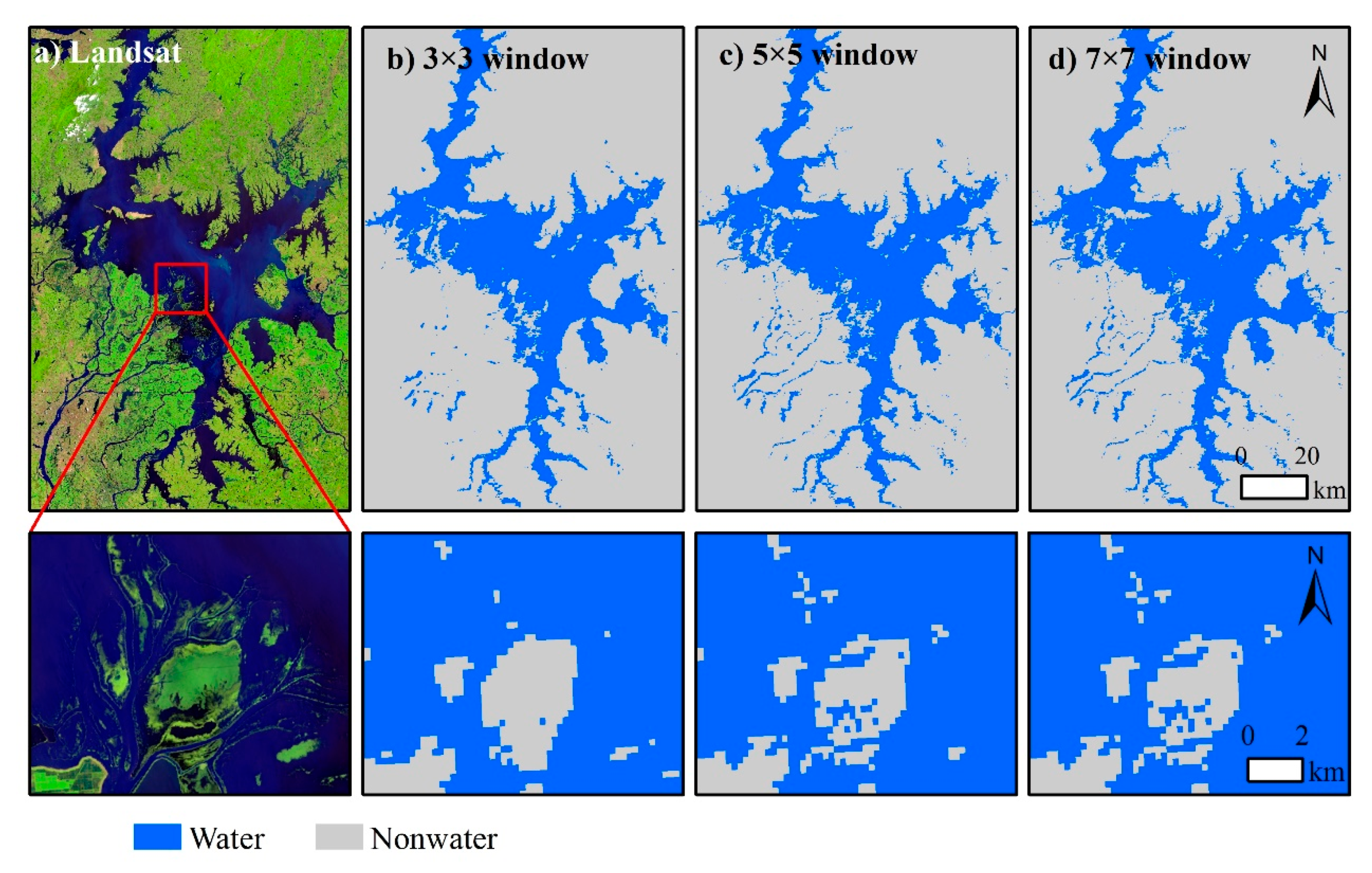
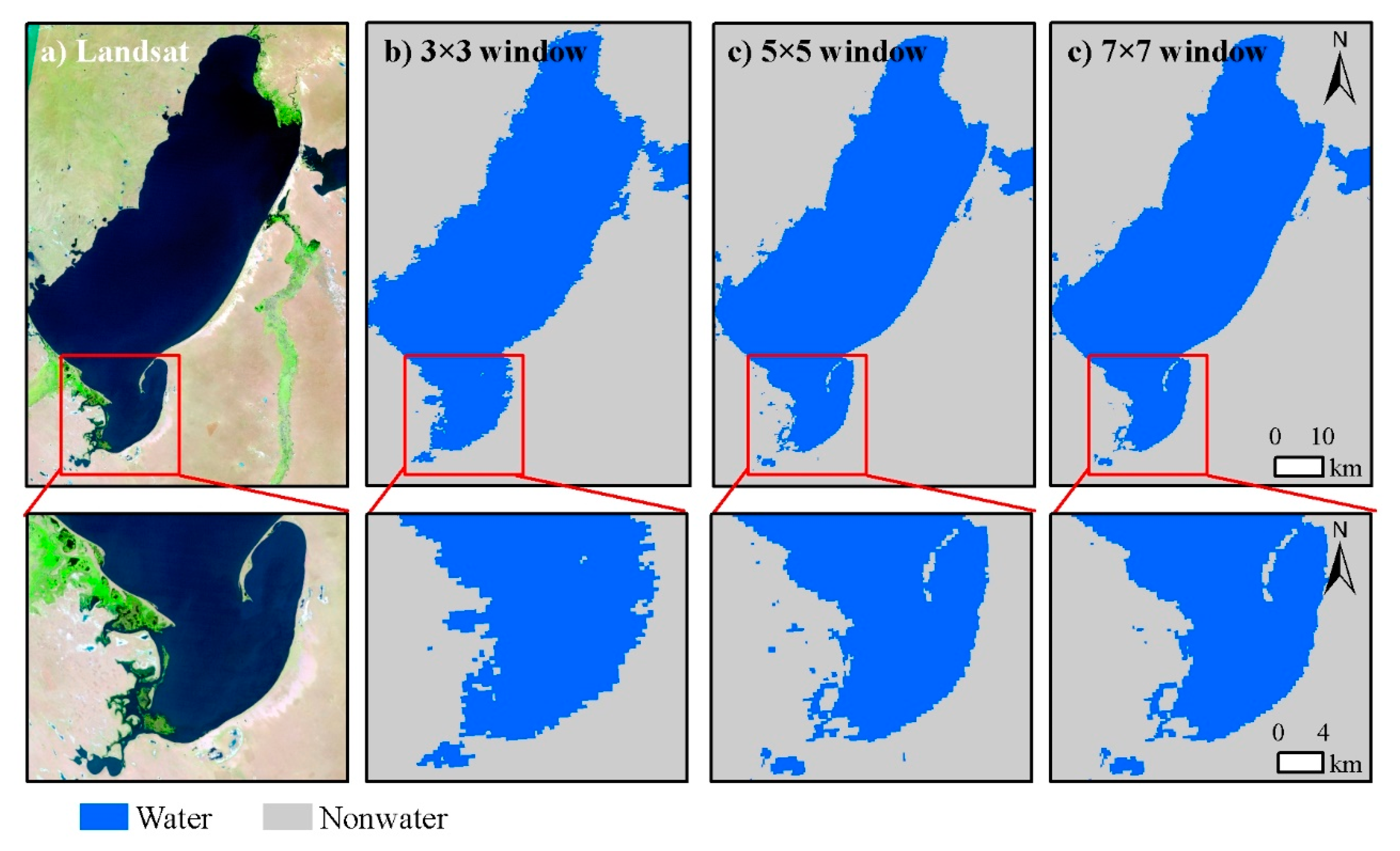
4.1.1. Comparison of the Results of Different Windows
4.1.2. Accuracy Assessment with Landsat Images
4.2. Case Monitoring Results
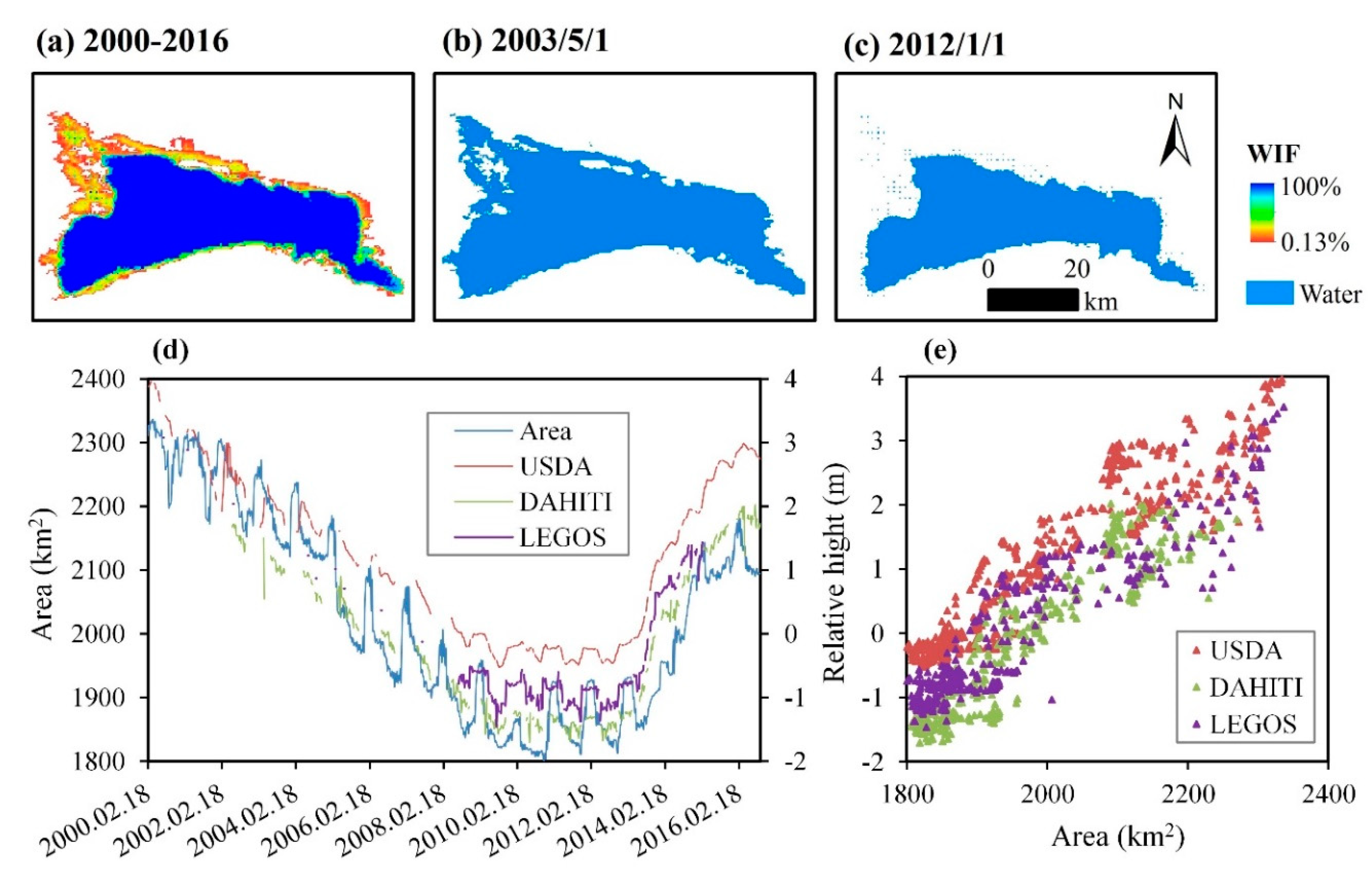
4.2.1. The Case of Bosten Lake
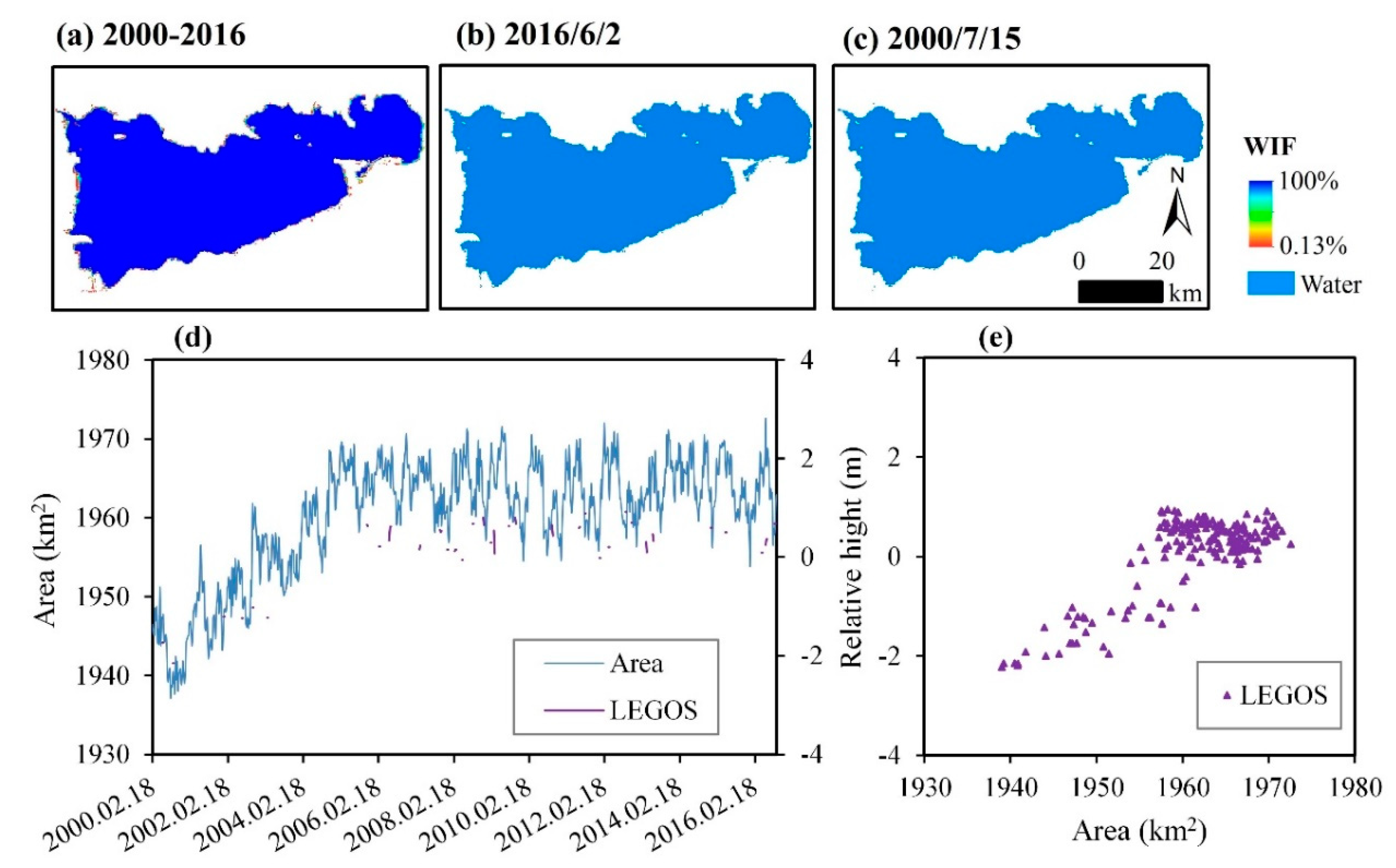
4.2.2. The Case of Namco Lake
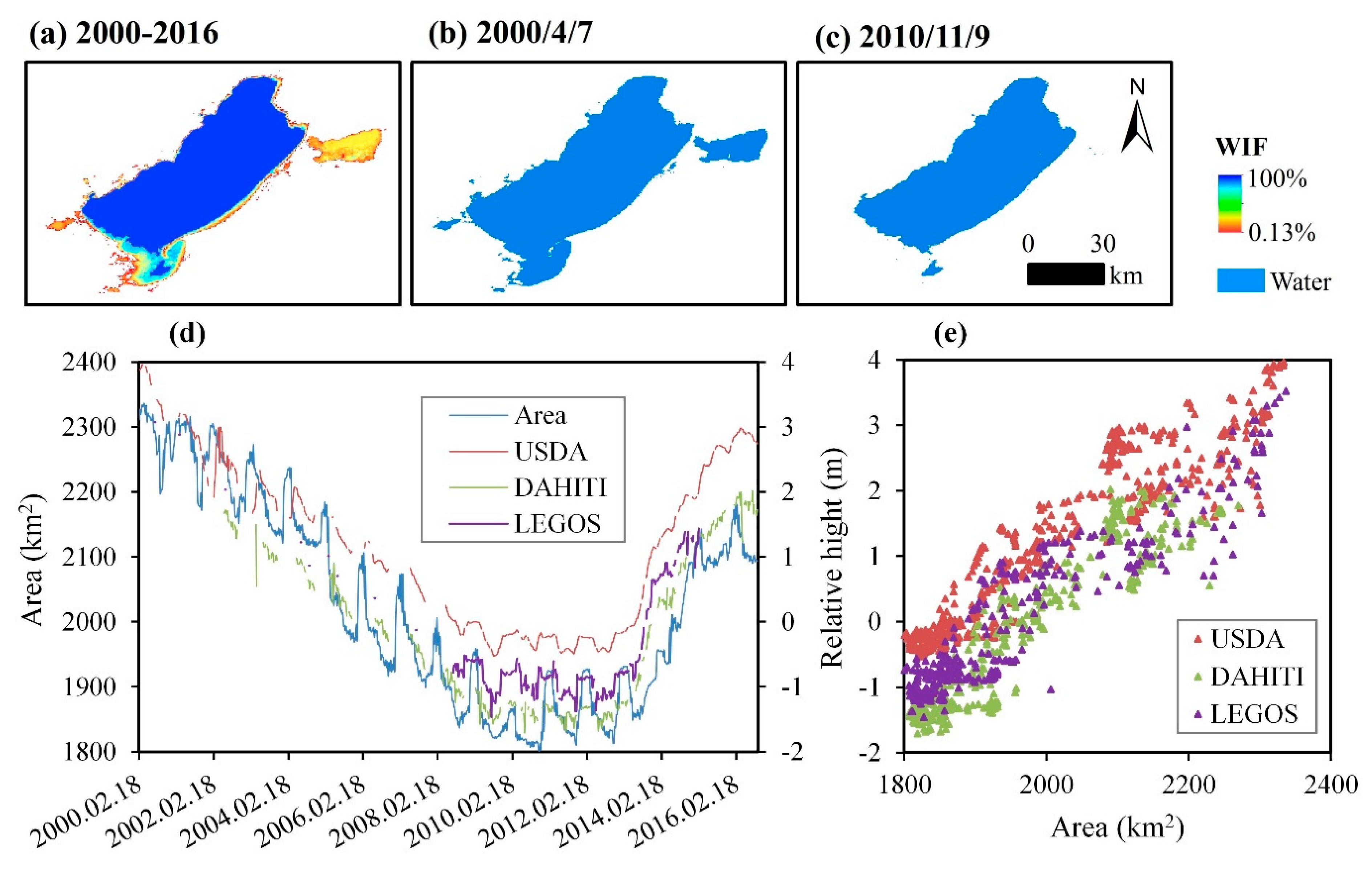
4.2.3. The Case of Hulun Lake
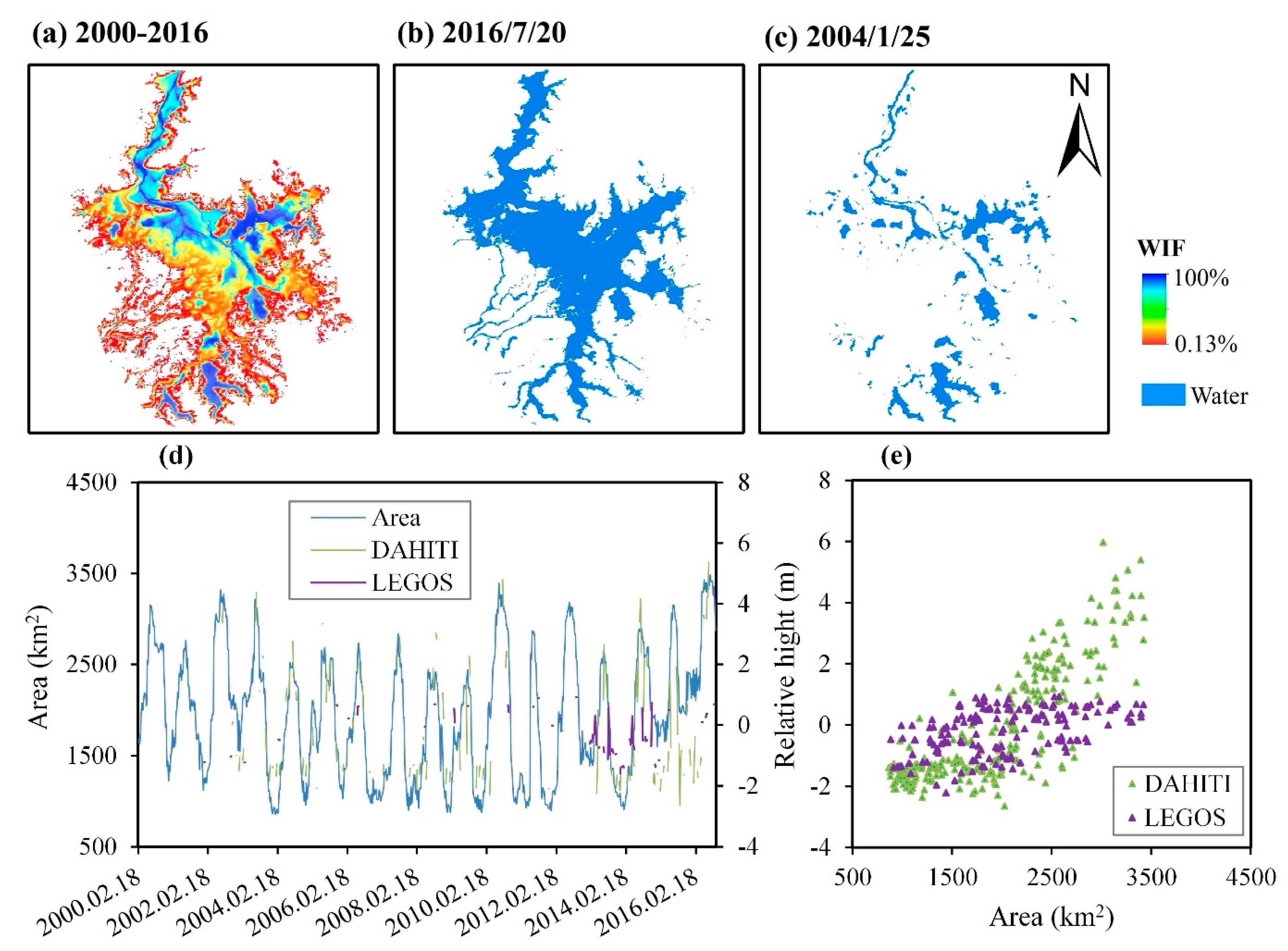
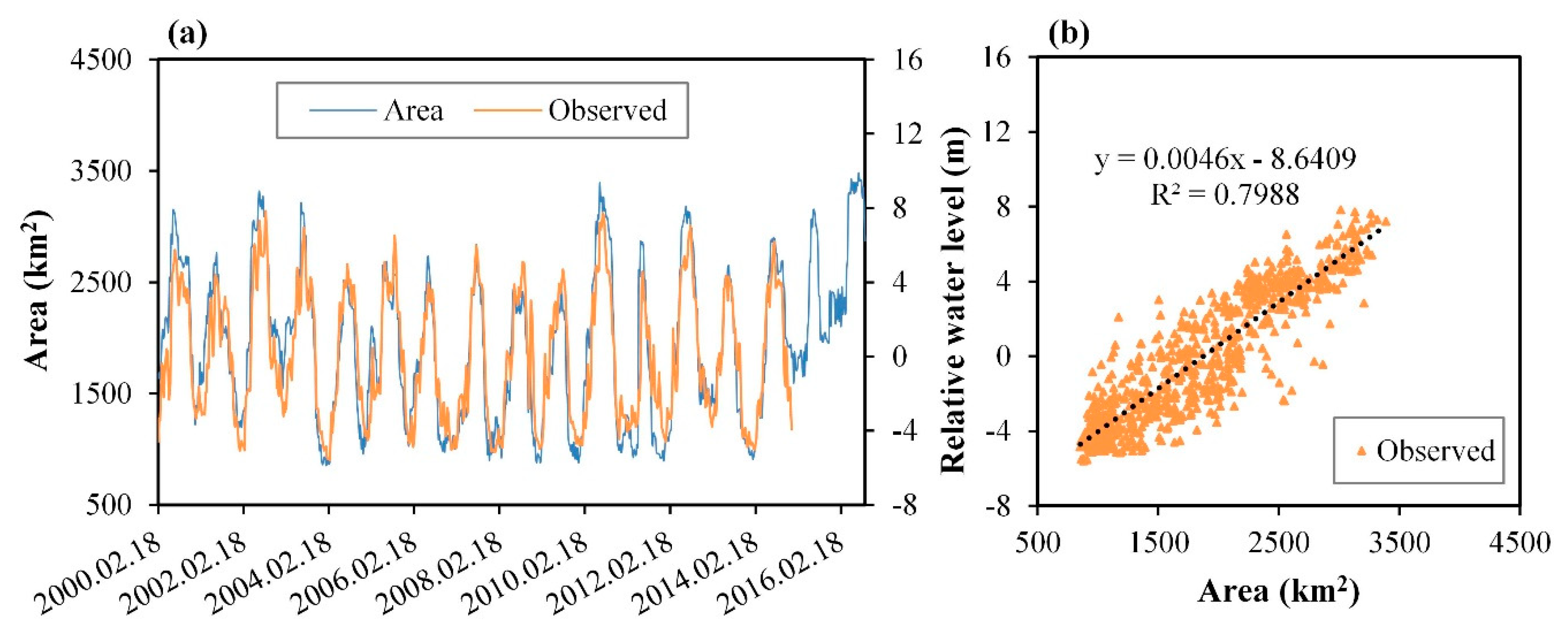
4.2.4. The Case of Poyang Lake
5. Discussion
5.1. Advantages of the Approach
5.2. Challenges for the Four Lakes
5.3. Further Improvement
5.3.1. Potential Improvement to Remove Noise
5.3.2. Selection of More Efficient Classification Methods
5.3.3. Applications of the Fusion Method for Higher-Resolution Data
6. Conclusions
- The classification results are reliably validated using some Landsat-based results. The approach performs efficiently in obtaining time series “water” extent of the lakes based on the MODIS products by comparing against altimetry data and water level data.
- The RF classifier is efficient in the long-term sequence classification, and post-processing is also critical in removing noise and restoring water bodies.
- Although there are still some shortcoming (e.g., single water pixel information may be eliminated), the HDSTAFM is feasible for the fusion of two sets of water results. Moreover, the 5 × 5 window performs better than the 3 × 3 and 7 × 7 windows.
Author Contributions
Funding
Conflicts of Interest
References
- Oki, T.; Kanae, S. Global Hydrological Cycles and World Water Resources. Science 2006, 313, 1068–1072. [Google Scholar] [CrossRef] [PubMed]
- Haddeland, I.; Heinke, J.; Biemans, H.; Eisner, S.; Flörke, M.; Hanasaki, N.; Konzmann, M.; Ludwig, F.; Masaki, Y.; Schewe, J.; et al. Global water resources affected by human interventions and climate change. Proc. Natl. Acad. Sci. USA 2014, 111, 3251–3256. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Donchyts, G.; Baart, F.; Winsemius, H.; Gorelick, N.; Kwadijk, J.; van de Giesen, N. Earth’s surface water change over the past 30 years. Nat. Clim. Chang. 2016, 6, 810–813. [Google Scholar] [CrossRef]
- Zhang, G.; Yao, T.; Chen, W.; Zheng, G.; Shum, C.K.; Yang, K.; Piao, S.; Sheng, Y.; Yi, S.; Li, J.; et al. Regional differences of lake evolution across China during 1960s–2015 and its natural and anthropogenic causes. Remote Sens. Environ. 2019, 221, 386–404. [Google Scholar] [CrossRef]
- Chen, B.; Chen, L.; Huang, B.; Michishita, R.; Xu, B. Dynamic monitoring of the Poyang Lake wetland by integrating Landsat and MODIS observations. ISPRS J. Photogramm. Remote Sens. 2018, 139, 75–87. [Google Scholar] [CrossRef]
- Huang, S.; Li, J.; Xu, M. Water surface variations monitoring and flood hazard analysis in Dongting Lake area using long-term Terra/MODIS data time series. Nat. Hazards 2012, 62, 93–100. [Google Scholar] [CrossRef]
- Klein, I.; Dietz, A.J.; Gessner, U.; Galayeva, A.; Myrzakhmetov, A.; Kuenzer, C. Evaluation of seasonal water body extents in Central Asia over the past 27 years derived from medium-resolution remote sensing data. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 335–349. [Google Scholar] [CrossRef]
- Li, Q.; Lu, L.; Wang, C.; Li, Y.; Sui, Y.; Guo, H. MODIS-Derived Spatiotemporal Changes of Major Lake Surface Areas in Arid Xinjiang, China, 200–2014. Water 2015, 7, 5731–5751. [Google Scholar] [CrossRef]
- Ogilvie, A.; Belaud, G.; Delenne, C.; Bailly, J.-S.; Bader, J.-C.; Oleksiak, A.; Ferry, L.; Martin, D. Decadal monitoring of the Niger Inner Delta flood dynamics using MODIS optical data. J. Hydrol. 2015, 523, 368–383. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Chen, X.; Cai, X.; Tian, L.; Gan, W. Assessment of inundation changes of Poyang Lake using MODIS observations between 2000 and 2010. Remote Sens. Environ. 2012, 121, 80–92. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Ji, L.; Gong, P.; Wang, J.; Shi, J.; Zhu, Z. Construction of the 500-m Resolution Daily Global Surface Water Change Database (2001–2016). Water Resour. Res. 2018, 56, 10270–10292. [Google Scholar] [CrossRef]
- Sun, F.; Zhao, Y.; Gong, P.; Ma, R.; Dai, Y. Monitoring dynamic changes of global land cover types: Fluctuations of major lakes in China every 8 days during 2000–2010. Chin. Sci. Bull. 2014, 59, 171–189. [Google Scholar] [CrossRef]
- Klein, I.; Gessner, U.; Dietz, A.J.; Kuenzer, C. Global WaterPack-A 250 m resolution dataset revealing the daily dynamics of global inland water bodies. Remote Sens. Environ. 2017, 198, 345–362. [Google Scholar] [CrossRef]
- Khandelwal, A.; Karpatne, A.; Marlier, M.E.; Kim, J.; Lettenmaier, D.P.; Kumar, V. An approach for global monitoring of surface water extent variations in reservoirs using MODIS data. Remote Sens. Environ. 2017, 202, 113–128. [Google Scholar] [CrossRef]
- Wang, X.; Wang, W.; Jiang, W.; Jia, K.; Rao, P.; Lv, J. Analysis of the Dynamic Changes of the Baiyangdian Lake Surface Based on a Complex Water Extraction Method. Water 2018, 10, 1616. [Google Scholar] [CrossRef]
- Rao, P.; Jiang, W.; Hou, Y.; Chen, Z.; Jia, K. Dynamic change analysis of surface water in the Yangtze River Basin based on MODIS products. Remote Sens. 2018, 10, 1025. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Tulbure, M.G.; Broich, M.; Stehman, S.V.; Kommareddy, A. Surface water extent dynamics from three decades of seasonally continuous Landsat time series at subcontinental scale in a semi-arid region. Remote Sens. Environ. 2016, 178, 142–157. [Google Scholar] [CrossRef]
- Deng, Y.; Jiang, W.; Tang, Z.; Li, J.; Lv, J.; Chen, Z.; Jia, K. Spatio-Temporal Change of Lake Water Extent in Wuhan Urban Agglomeration Based on Landsat Images from 1987 to 2015. Remote Sens. 2017, 9, 270. [Google Scholar] [CrossRef]
- Pohl, C.; Van Genderen, J.L. Review article Multisensor image fusion in remote sensing: Concepts, methods and applications. Int. J. Remote Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef]
- Du, P.; Liu, S.; Xia, J.; Zhao, Y. Information fusion techniques for change detection from multi-temporal remote sensing images. Inf. Fusion 2013, 14, 19–27. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Linke, J.; McDermid, G.; Masek, J.G.; Gao, F.; White, J.C. A new data fusion model for high spatial- and temporal-resolution mapping of forest disturbance based on Landsat and MODIS. Remote Sens. Environ. 2009, 113, 1613–1627. [Google Scholar] [CrossRef]
- Walker, J.J.; de Beurs, K.M.; Wynne, R.H.; Gao, F. Evaluation of Landsat and MODIS data fusion products for analysis of dryland forest phenology. Remote Sens. Environ. 2012, 117, 381–393. [Google Scholar] [CrossRef]
- Gevaert, C.M.; García-Haro, F.J. A comparison of STARFM and an unmixing-based algorithm for Landsat and MODIS data fusion. Remote Sens. Environ. 2015, 156, 34–44. [Google Scholar] [CrossRef]
- Carroll, M.L.; Townshend, J.R.; DiMiceli, C.M.; Noojipady, P.; Sohlberg, R.A. A new global raster water mask at 250 m resolution. Int. J. Digit. Earth 2009, 2, 291–308. [Google Scholar] [CrossRef]
- Klein, I.; Gessner, U.; Dietz, A.; Leinenkugel, P.; Dech, S.; Kuenzer, C. Detection of inland water bodies with high temporal resolution-assessing dynamic threshold approaches. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 7647–7650. [Google Scholar]
- Cracknell, M.J.; Reading, A.M. Geological mapping using remote sensing data: A comparison of five machine learning algorithms, their response to variations in the spatial distribution of training data and the use of explicit spatial information. Comput. Geosci. 2014, 63, 22–33. [Google Scholar] [CrossRef]
- Hao, P.; Zhan, Y.; Wang, L.; Niu, Z.; Shakir, M. Feature Selection of Time Series MODIS Data for Early Crop Classification Using Random Forest: A Case Study in Kansas, USA. Remote Sens. 2015, 7, 5347–5369. [Google Scholar] [CrossRef]
- Zhang, Z.; Prinet, V.; Ma, S. Water body extraction from multi-source satellite images. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Toulouse, France, 21–25 July 2003; pp. 3970–3972. [Google Scholar]
- Gao, F.; Anderson, M.C.; Zhang, X.; Yang, Z.; Alfieri, J.G.; Kustas, W.P.; Mueller, R.; Johnson, D.M.; Prueger, J.H. Toward mapping crop progress at field scales through fusion of Landsat and MODIS imagery. Remote Sens. Environ. 2017, 188, 9–25. [Google Scholar] [CrossRef]
- Simon, R.N.; Tormos, T.; Danis, P.-A. Very high spatial resolution optical and radar imagery in tracking water level fluctuations of a small inland reservoir. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 36–39. [Google Scholar] [CrossRef]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Brisco, B.; Motagh, M. Multi-temporal, multi-frequency, and multi-polarization coherence and SAR backscatter analysis of wetlands. ISPRS J. Photogramm. Remote Sens. 2018, 142, 78–93. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Vancutsem, C.; Bastin, L.; Clerici, M.; Vanbogaert, E.; Bartholomé, E.; Defourny, P. A near real-time water surface detection method based on HSV transformation of MODIS multi-spectral time series data. Remote Sens. Environ. 2014, 140, 704–716. [Google Scholar] [CrossRef]
- Jia, K.; Jiang, W.; Li, J.; Tang, Z. Spectral matching based on discrete particle swarm optimization: A new method for terrestrial water body extraction using multi-temporal Landsat 8 images. Remote Sens. Environ. 2018, 209, 1–18. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lakes | Location | Elevation (m) | Area (km2) | Maximum Depth (m) | Average Depth (m) | Salinity (g · L−1) | Climate | Annual Precipitation (mm) |
|---|---|---|---|---|---|---|---|---|
| Bosten | E86°40’–87°25’ N41°56’–42°14’ | 1048 | 992 | 16.5 | 8.08 | 1.865 | Temperate Continent | 121 |
| Namco | E88°33’–89°21’ N31°34’–31°51’ | 4718 | 1920 | >95 | – | 1.78 | Plateau Alpine | 434 |
| Hulun | E117°00’–117°42’ N48°30’–49°21’ | 545 | 2339 | 8 | 5.92 | 1.17 | Temperate Continent | 244 |
| Poyang | E115°47’–116°45’ N28°22’–29°45’ | 10 | 3283 | 25.1 | 8.4 | 0.047 | Subtropical Monsoon | 1500 |
| Lakes | The Number of Valid Data | Linear Correlation (R) | ||||
|---|---|---|---|---|---|---|
| USDA | DAHITI | LEGOS | USDA | DAHITI | LEGOS | |
| Bosten | 476 (2000–2016) | 384 (2002–2016) | 252 (2002–2015) | 0.76 | 0.87 | 0.88 |
| Namco | – | – | 169 (2000–2016) | – | – | 0.79 |
| Hulun | 543 (2000–2016) | 389 (2000–2016) | 371 (2000–2015) | 0.93 | 0.93 | 0.92 |
| Poyang | – | 261 (2002–2016) | 156 (2000–2016) | – | 0.82 | 0.46 |
| Lakes | Date | OA | UA | PA | KC |
|---|---|---|---|---|---|
| Bosten | 16/July/2003 (High) | 0.95 | 0.93 | 0.94 | 0.90 |
| 24/September/2011 (Low) | 0.97 | 0.99 | 0.92 | 0.93 | |
| Hulun | 16/June/2000 (High) | 0.97 | 0.99 | 0.97 | 0.94 |
| 28/October/2011 (Low) | 0.97 | 0.96 | 0.98 | 0.95 | |
| Namco | 02/October/2015 (High) | 0.97 | 0.99 | 0.96 | 0.93 |
| 18/November/2003 (Low) | 0.97 | 1.00 | 0.96 | 0.93 | |
| Poyang | 16/February/2016 (High) | 0.94 | 0.92 | 0.91 | 0.86 |
| 23/June/2016 (Low) | 0.91 | 0.85 | 0.79 | 0.78 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rao, P.; Lou, L.; Jiang, W.; Wang, Y.; Wang, X.; Cao, X. Continuous Dynamics Monitoring of Multi-Lake Water Extent Using a Spatial and Temporal Adaptive Fusion Method Based on Two Sets of MODIS Products. Sensors 2019, 19, 4873. https://doi.org/10.3390/s19224873
Rao P, Lou L, Jiang W, Wang Y, Wang X, Cao X. Continuous Dynamics Monitoring of Multi-Lake Water Extent Using a Spatial and Temporal Adaptive Fusion Method Based on Two Sets of MODIS Products. Sensors. 2019; 19(22):4873. https://doi.org/10.3390/s19224873
Chicago/Turabian StyleRao, Pinzeng, Linjiang Lou, Weiguo Jiang, Yicheng Wang, Xiaoya Wang, and Xiayu Cao. 2019. "Continuous Dynamics Monitoring of Multi-Lake Water Extent Using a Spatial and Temporal Adaptive Fusion Method Based on Two Sets of MODIS Products" Sensors 19, no. 22: 4873. https://doi.org/10.3390/s19224873
APA StyleRao, P., Lou, L., Jiang, W., Wang, Y., Wang, X., & Cao, X. (2019). Continuous Dynamics Monitoring of Multi-Lake Water Extent Using a Spatial and Temporal Adaptive Fusion Method Based on Two Sets of MODIS Products. Sensors, 19(22), 4873. https://doi.org/10.3390/s19224873