Moving and deforming components can have significant impact on frequency response and manufacturing non-uniformities affect performance. To properly take advantage of new additive manufacturing techniques in electromagnetic structures there need to be adequate studies on the impact of process specific defects on RF performance. This appendix serves as a presentation of initial findings in the impact of process specific defects in the case of the spiral FSS presented in this manuscript.
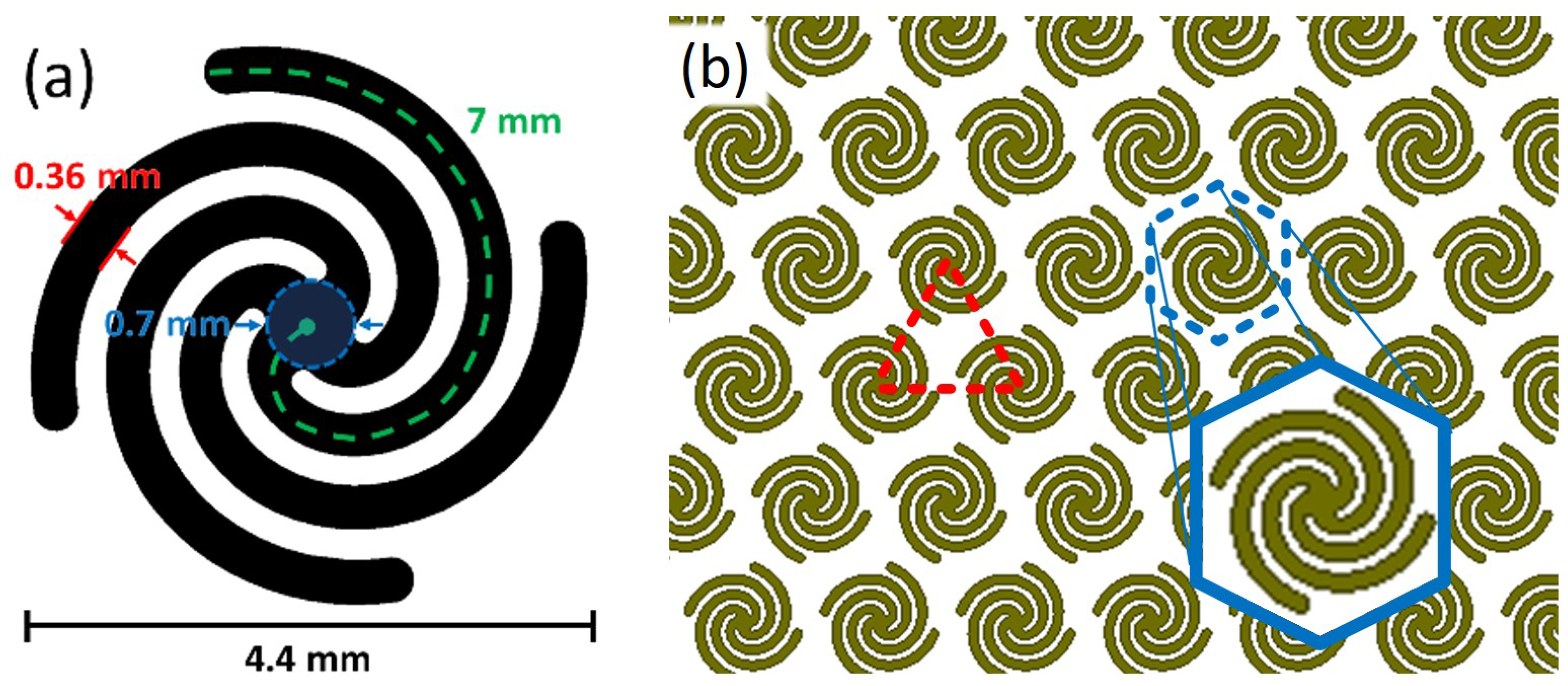
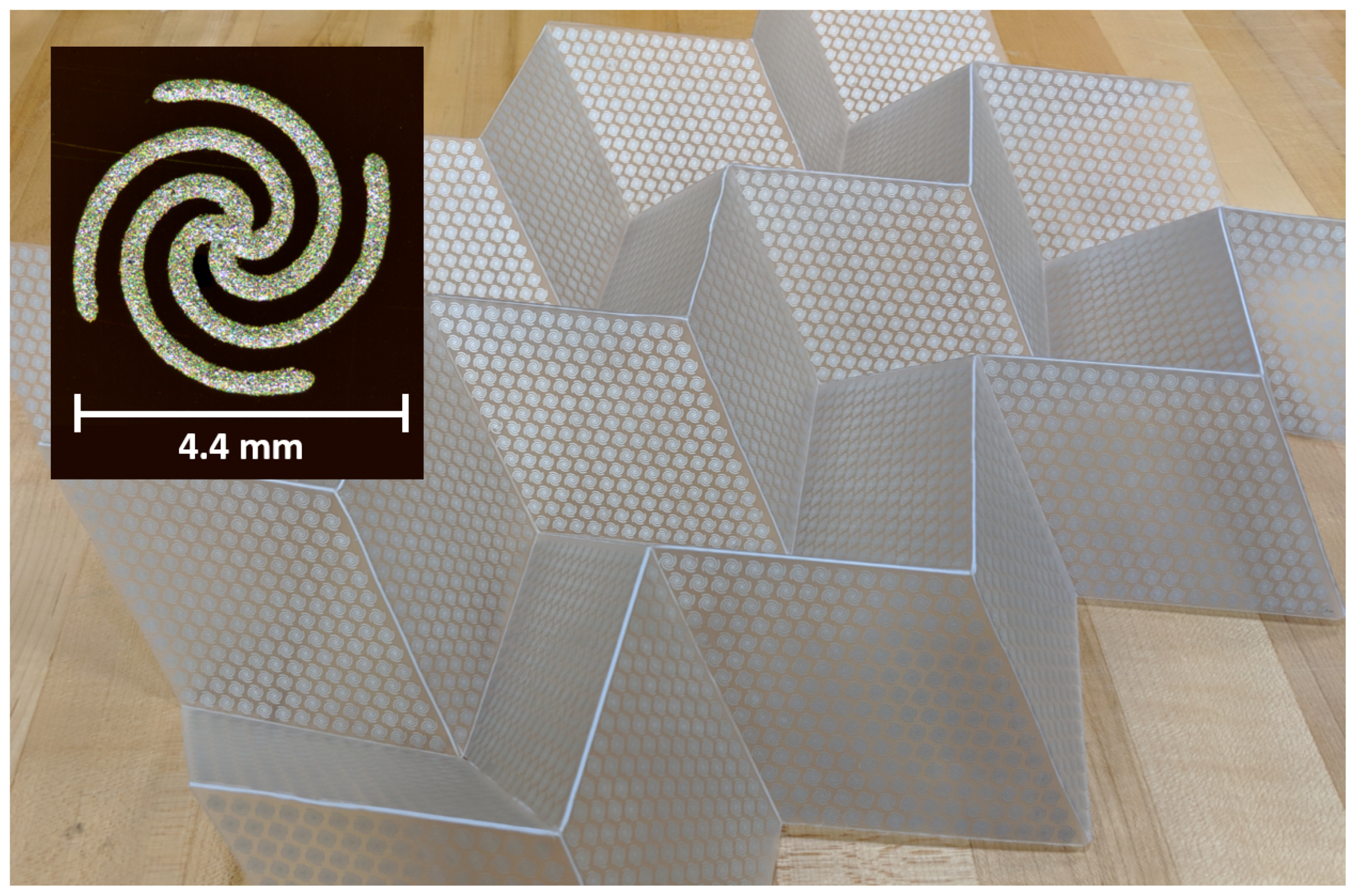
The FSS is a passive meta-material formed of repeated sub-wavelength units and the periodic structure can produce undesired grating lobes. These grating lobes can be minimized by utilizing compact and densely packed elements. However the compact nature can cause additional fabrication concerns which will be discussed below.
Appendix A.1. Print Process Specific Defects
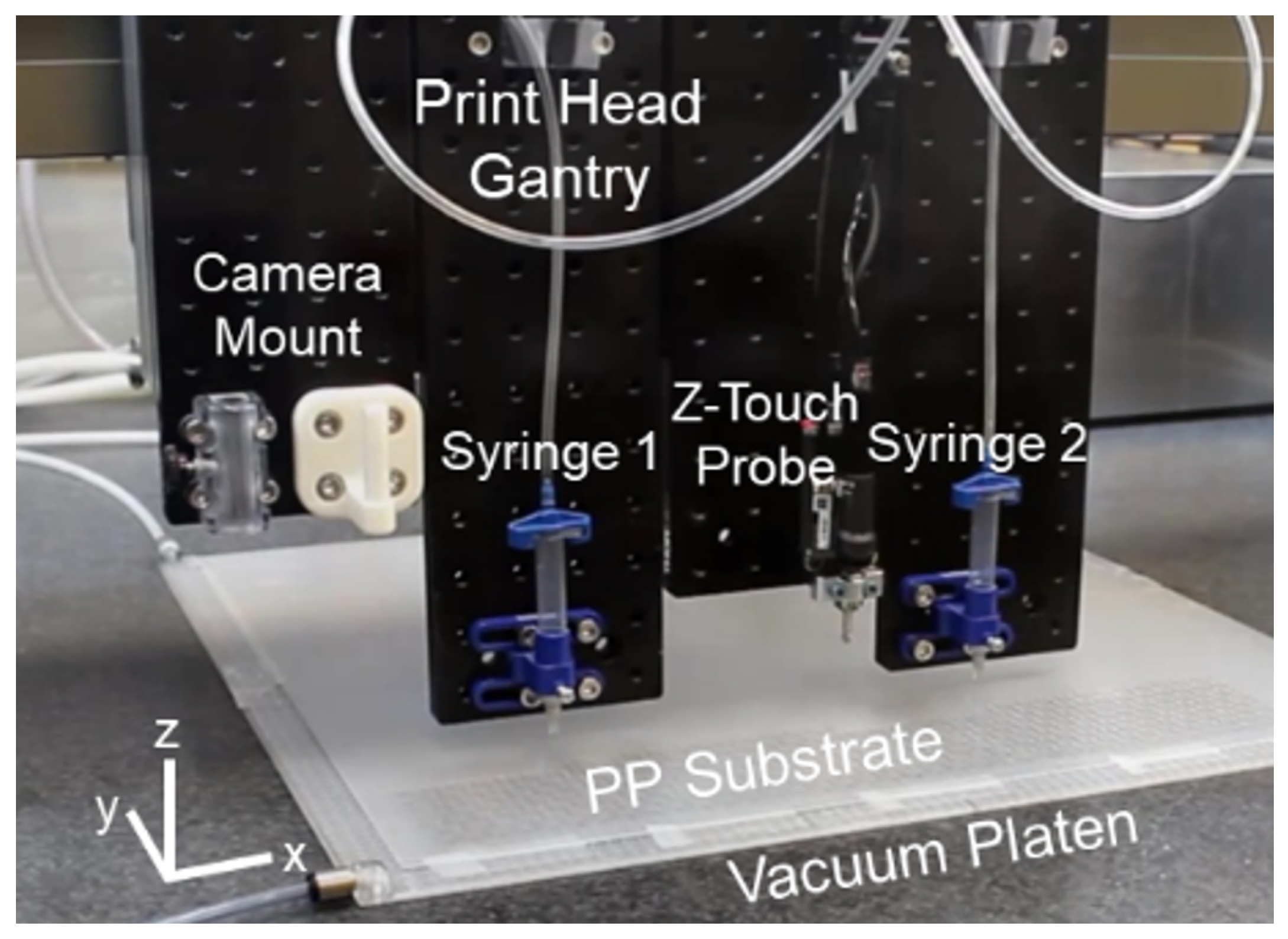
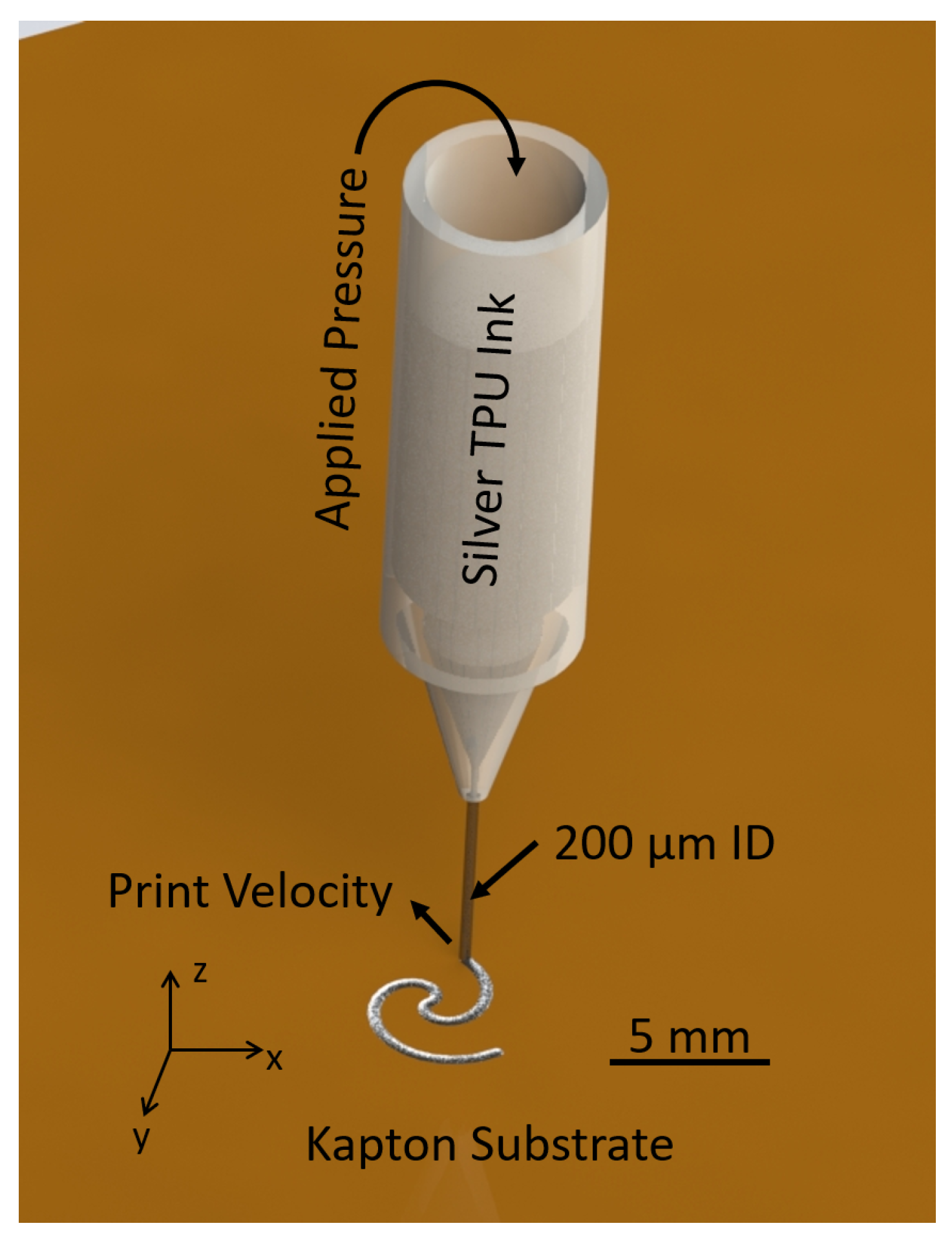
Figure A1 shows a schematic of the syringe print head used in the procedures found in
Section 4. Pressure is applied at the top of the syringe and silver ink is extruded through a 200
m syringe tip. Speed is varied through the print process and has been tuned to minimize defects; however, this extrusion process can introduce defects to the fabricated sample.
Figure A1.
Print setup denoting syringe placement and size for extrusion direct-ink write process.
Figure A1.
Print setup denoting syringe placement and size for extrusion direct-ink write process.
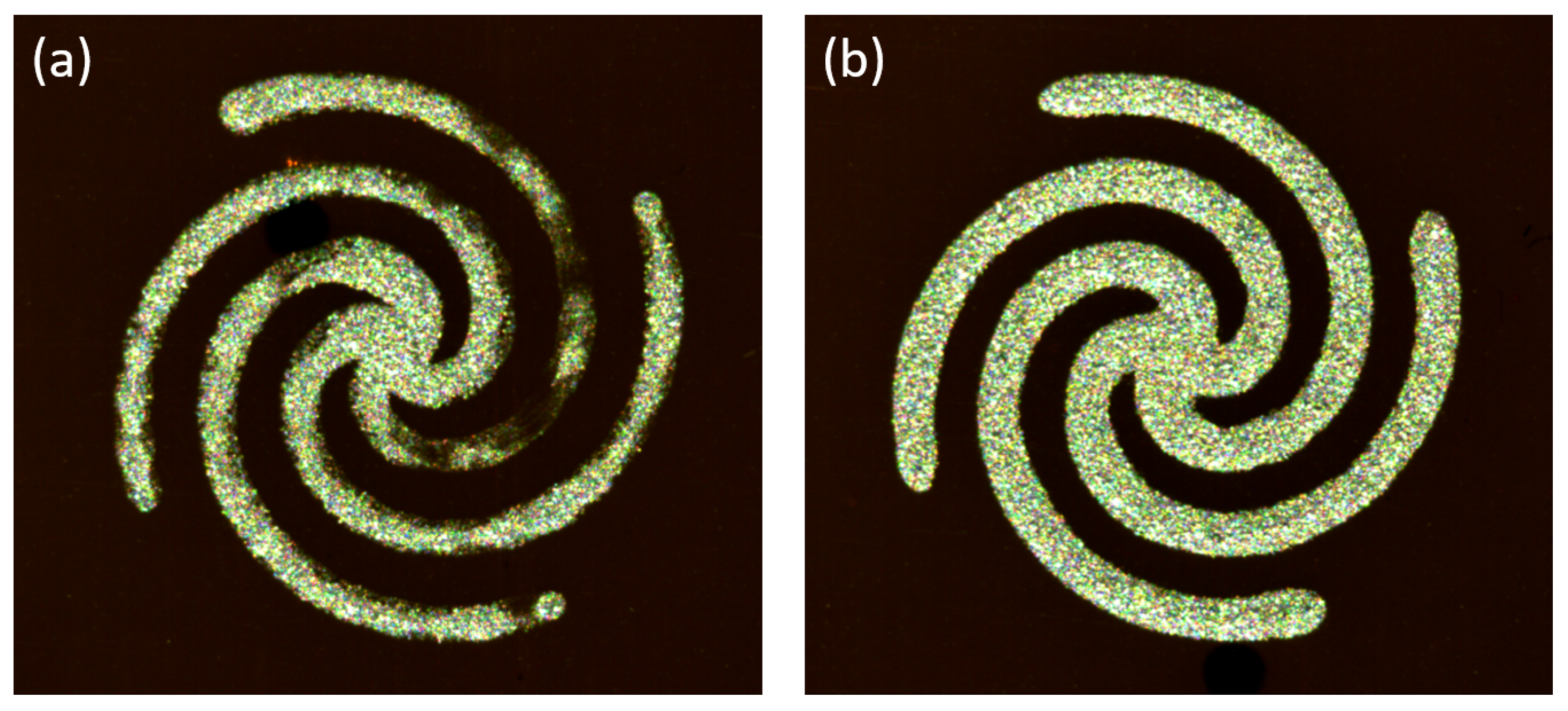
Figure A2 shows an example of a spiral with a major defect compared to a spiral with near ideal dimensions. The major defects present in the image can be attributed to multiple parts of the print process, most commonly the missing patches of ink in the arms occur when an air bubble is present in the ink or when the Z-touch probe does not capture the true variance in print stage height with a single reading. A view of the Z-touch probe measurements are seen in
Figure A3. Major print defects can have significant impact on the aggregate FSS response when defects are present in large percentages of the population. While major defects can be easily seen, there are many minor defects present in which there are slight variation to the target geometry. These slight variations can come in larger quantities and need to be mitigated to achieve the desired frequency response.
Figure A2.
(a) Printed spiral image with major print defects including tapered arms, large portions of missing ink, and varied arm width. (b) Printed spiral image with near ideal geometry.
Figure A2.
(a) Printed spiral image with major print defects including tapered arms, large portions of missing ink, and varied arm width. (b) Printed spiral image with near ideal geometry.
Figure A3 shows the Z-touch probe measurements of substrate height for a single run. Each dot is a single spiral and the colors denote the standard deviation measurement from the anticipated height. In the figure we see pockets of height deviation that are attributed to both substrate warping and print stage design. The lines found at
and
are attributed to the vacuum platens on the print stage that hold the substrate.
Figure A3.
Height map of gantry print stage. Colors indicate standard deviation from the expected height of the point. Expected value (green), 1 (blue), 2 (purple), ≥3 (red).
Figure A3.
Height map of gantry print stage. Colors indicate standard deviation from the expected height of the point. Expected value (green), 1 (blue), 2 (purple), ≥3 (red).
Appendix A.2. Image Processing
During the print process described in
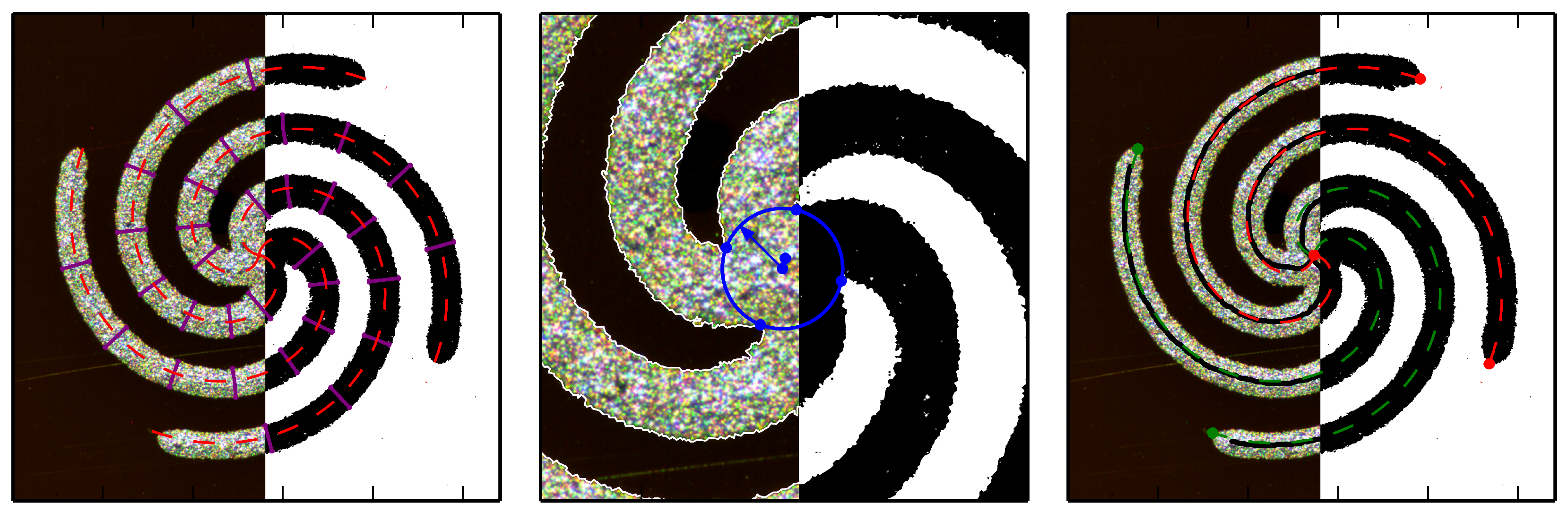
Section 4 each spiral is imaged with a high resolution camera post-print. From these images geometric characteristics can be extracted from each spiral. The geometry extraction process is shown in
Figure A4. Three key parameters are arm length, measured from the center of the spiral to the edge of the arm, arm width, measured normal to the direction of the arm length vector, and center radius, as defined by the circle placed at the intersection of each arm. These key parameters are studied for their impact on RF response in
Appendix A.3.
Figure A4.
Image processing overlay on a single spiral. (a) Width measurement via purple bars perpendicular to the red print path, (b) center radius calculation from four blue minimum radius points and circular fit, (c) arm length calculation depicted by green starting point arms and red stopping point arms. Note: Images are flipped horizontally in analysis software.
Figure A4.
Image processing overlay on a single spiral. (a) Width measurement via purple bars perpendicular to the red print path, (b) center radius calculation from four blue minimum radius points and circular fit, (c) arm length calculation depicted by green starting point arms and red stopping point arms. Note: Images are flipped horizontally in analysis software.
The analysis process utilizes SciPy [
18] and SciKit-Image [
19] for geometry extraction and MatPlotLib [
20] for data visualization. As the exact
XY-position of the spiral and its angular orientation are not known at the time of imaging, the algorithm is designed to find the center of the spiral using the SciPy center of mass algorithm which finds the approximate position of the arms by using Scikit-Image’s skeletonize algorithm. The skeleton points are converted from cartesian coordinates into polar coordinates around the center of mass, then a linear fit is applied to one of the arms to determine the orientation of the spiral. From this information the print path is recreated as shown by the red and green dashed lines in
Figure A4c and can be traced from the center to the ends of each arm to measure the length. This allows measurement of arm width by tracing along lines normal to the print path until they reach the edge, these normal lines are represented by violet lines in
Figure A4a. Multiple arm width measurements are taken to average out the effect of edge roughness and check to see if the arm width is consistent along the length of the arms. While we detected a small increase in width near the center, the width measurements were otherwise constant within the bounds of edge roughness, with respect to length. The center radius is defined by the four edge points, one in each quadrant, closest to the center of mass. The set of edge points is defined by SciKit-Image’s find contours algorithm. A SciPy minimize function finds a center point (
) and radius,
r, which minimizes the fit function described in Equation (
A1).
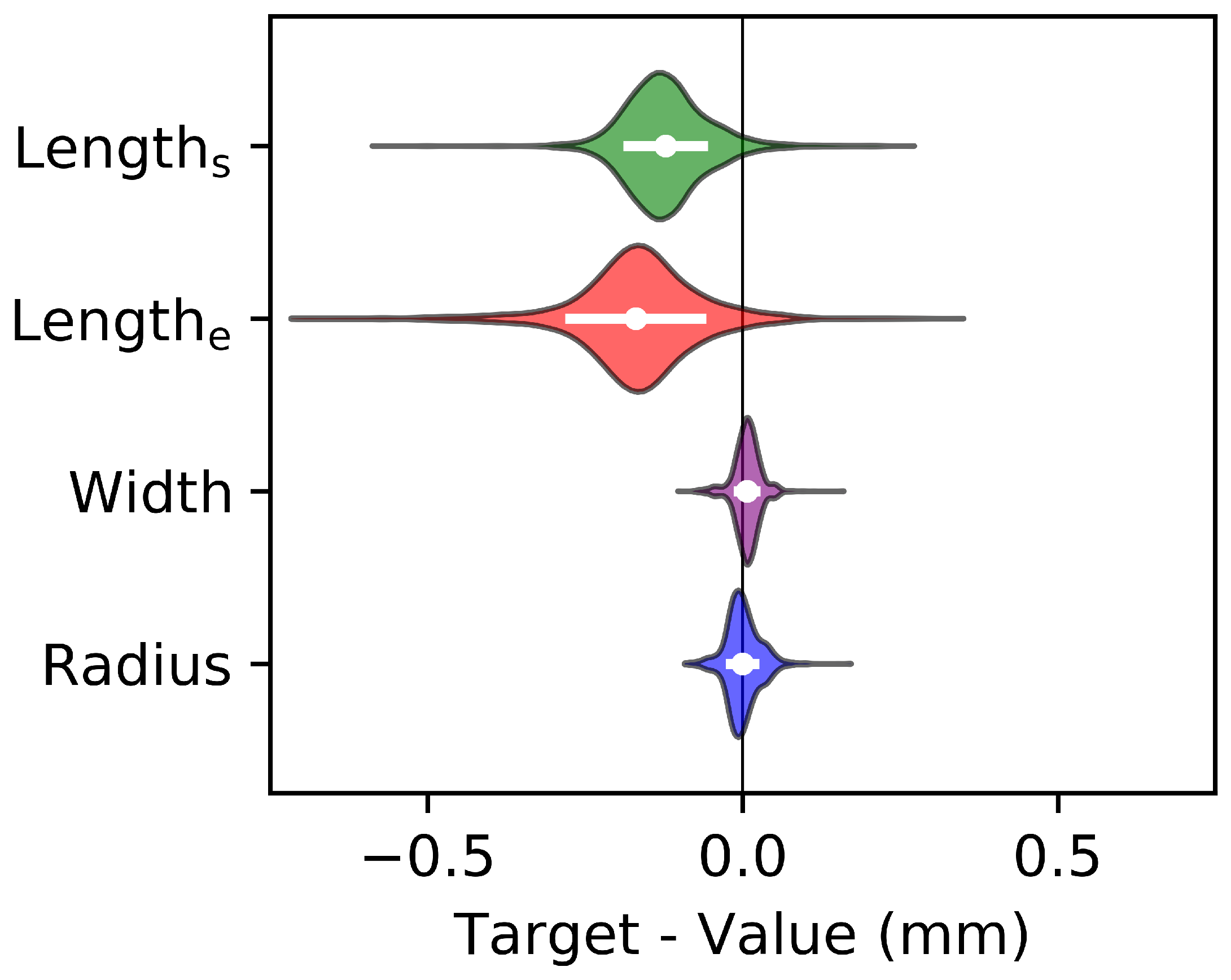
The quantity of printing errors can be described in two ways; the accuracy and the repeatability of the parameter. These are generally calculated as the difference between the average observed and expected values, and the standard deviation of the observed values respectively. This is visualized in a set of violin plots in
Figure A5. A perfect spiral print would be represented as delta functions at
in the violin plots, implying that all spirals have each parameter equal to the target value. The accuracy is depicted by the
x-offset of each violin plot, and the repeatability is depicted by the width of the plot. In the context of the FSS functionality, the accuracy is related to the position of the center frequency, while the repeatability influences the Q-factor and bandwidth.
Figure A5.
Violin Plots of measured arm length, width, and spiral center radius. The thickness of each violin depicts the probability density of printing a spiral of that value. The white dots indicate the mean while the bars indicate standard deviation. Each parameter is normalized to the target value ().
Figure A5.
Violin Plots of measured arm length, width, and spiral center radius. The thickness of each violin depicts the probability density of printing a spiral of that value. The white dots indicate the mean while the bars indicate standard deviation. Each parameter is normalized to the target value ().
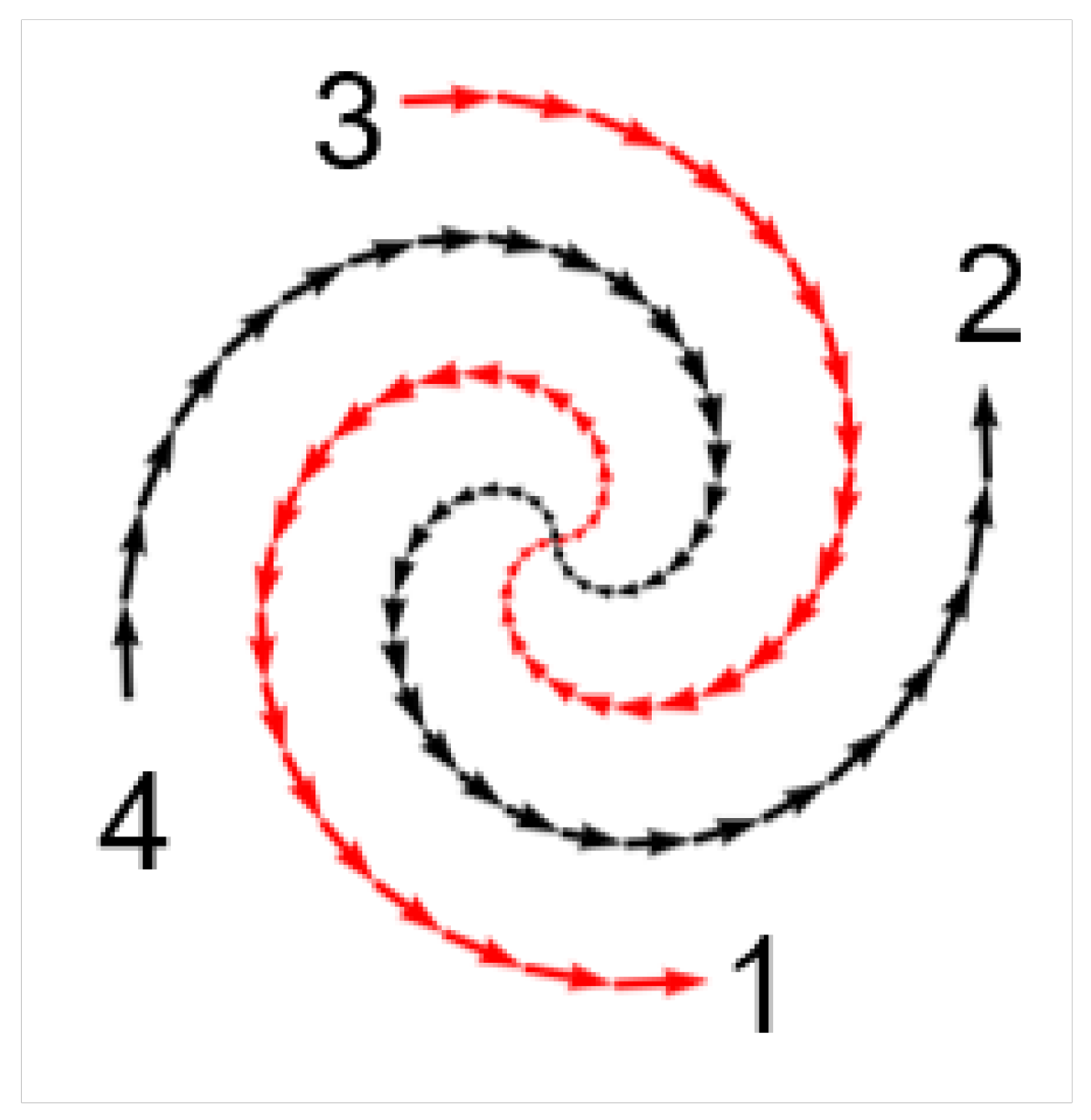
The length and width of each arm is measured independently. This proves important when viewing defects due to starting and stopping the ink extrusion.
Figure A6 shows the print path of the spiral. The extruder starts at point 3 and prints to point 1 then moves to point 4 and prints to point 2. The defects result in the length of each arm deviating from the expected parameters. Start and stop defects are minimized by manually adjusting the time between when the pump motion starts and when it stops. In the case of the FSS, we observed that stop defects produced an approximately 50
m length variation from the arms on which printing started verses when printing stopped (denoted as Length
for start and Length
for stop) as seen in
Table A1 arms came out shorter than targeted, while the start defects were more successfully controlled. The repeatability of the arm length is poor in many cases, but more poor in the stopping lengths than the starting lengths. The print process is adjusted to account for these errors in later prints from information about previously printed samples.
Figure A6.
Print path of spiral in extrusion print system. Print path follows 3–1 and 4–2.
Figure A6.
Print path of spiral in extrusion print system. Print path follows 3–1 and 4–2.
In contrast, we did not observe a significant variation in arm width between different arms in the print routine and along the length of an arm, thus we present an average value for the width of all arms. The width and radius of the spirals show better accuracy and repeatability as compared to the length of the arms. The camera resolution provides 5 m per pixel, therefore the accuracy and repeatability of the arm width and center radius are just above the noise threshold.
Table A1.
Target, Accuracy, and Repeatability Values for a Printed Spiral FSS.
Table A1.
Target, Accuracy, and Repeatability Values for a Printed Spiral FSS.
| Parameter | Target (mm) | Actual (mm) | Accuracy (m) | Repeatability (m) |
|---|
| Length | 5.61 | 5.44 | 169 | 112 |
| Length | 5.61 | 5.49 | 122 | 67 |
| Radius | 0.37 | 0.37 | 0 | 26 |
| Width | 0.38 | 0.39 | −6 | 21 |
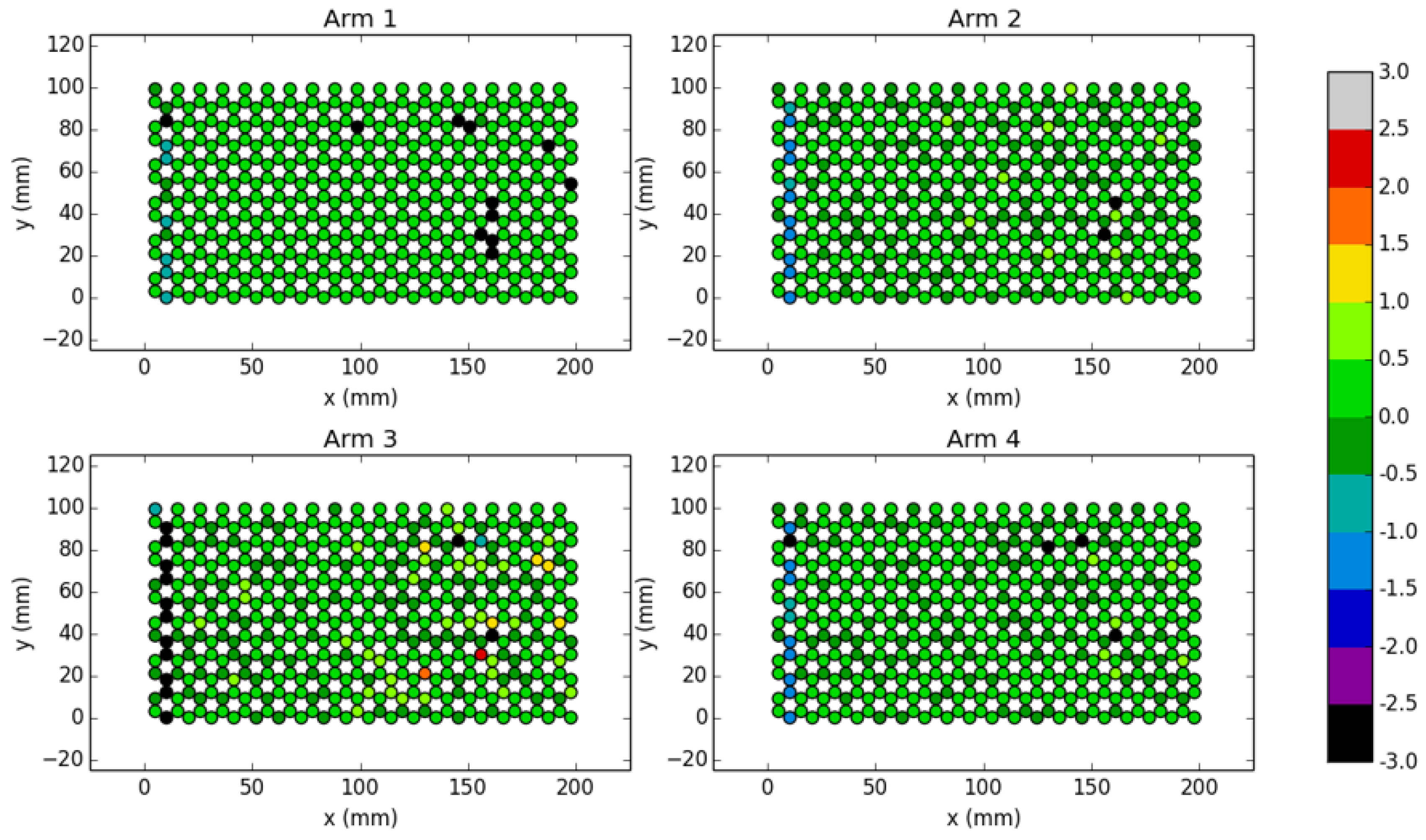
Figure A7 shows an example of a study of a subset of spirals in which arm lengths are independently measured and compared among spirals in the lattice. Each arm is measured to preserve information on start and stop defects rather than measuring the average length among the four arms in a single spiral. The colorbar scale refers to the increase or decrease in the millimeter length of the single arm compared to the target length. Each dot is a single spiral in a hexagonal lattice and the variances are denoted by the color of the dot. This visual representation provides feedback on specific areas where print defects occur during a print job. The analysis of geometry spatially in the lattice allows for print process parameters to be tuned prior to printing full samples. This arm length study was conducted as a means of determining where errors occurred in an attempt to mitigate them in later print processes.
Figure A7.
Subset analysis of variances in arm length with respect to target length. Spirals arranged as they are printed.
Figure A7.
Subset analysis of variances in arm length with respect to target length. Spirals arranged as they are printed.
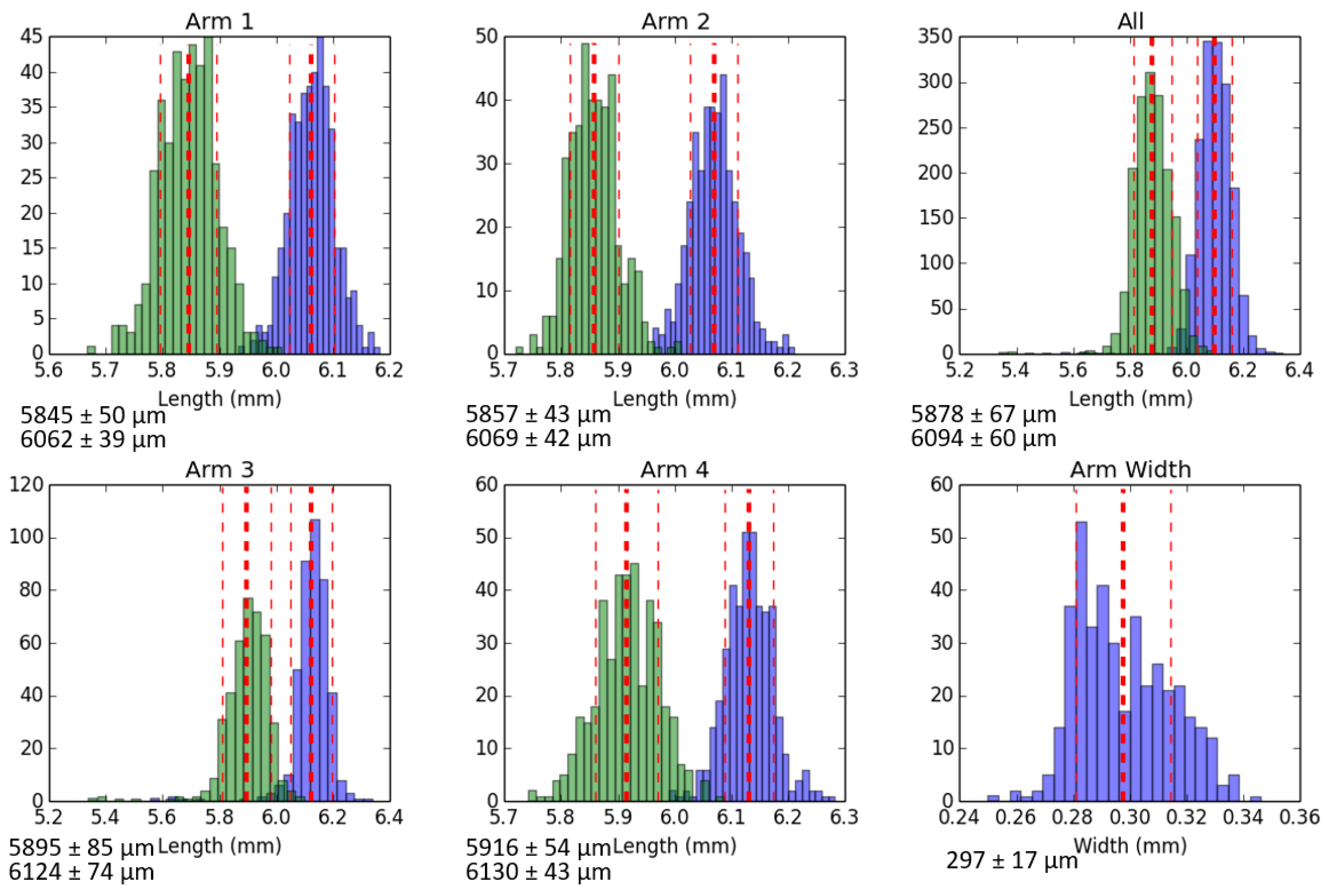
Figure A8 shows the distribution of arm lengths and arm widths. The arm length is measured using two methods, one from the center of the spiral (purple) and one from the inner radius (green).
Figure A8.
Histogram of dimensions for a subset of 400 spirals. Green bars are arm length measured from the center radius, purple bars are arm length measured from the center of the spiral, red lines are the average and the positive and negative standard deviation.
Figure A8.
Histogram of dimensions for a subset of 400 spirals. Green bars are arm length measured from the center radius, purple bars are arm length measured from the center of the spiral, red lines are the average and the positive and negative standard deviation.
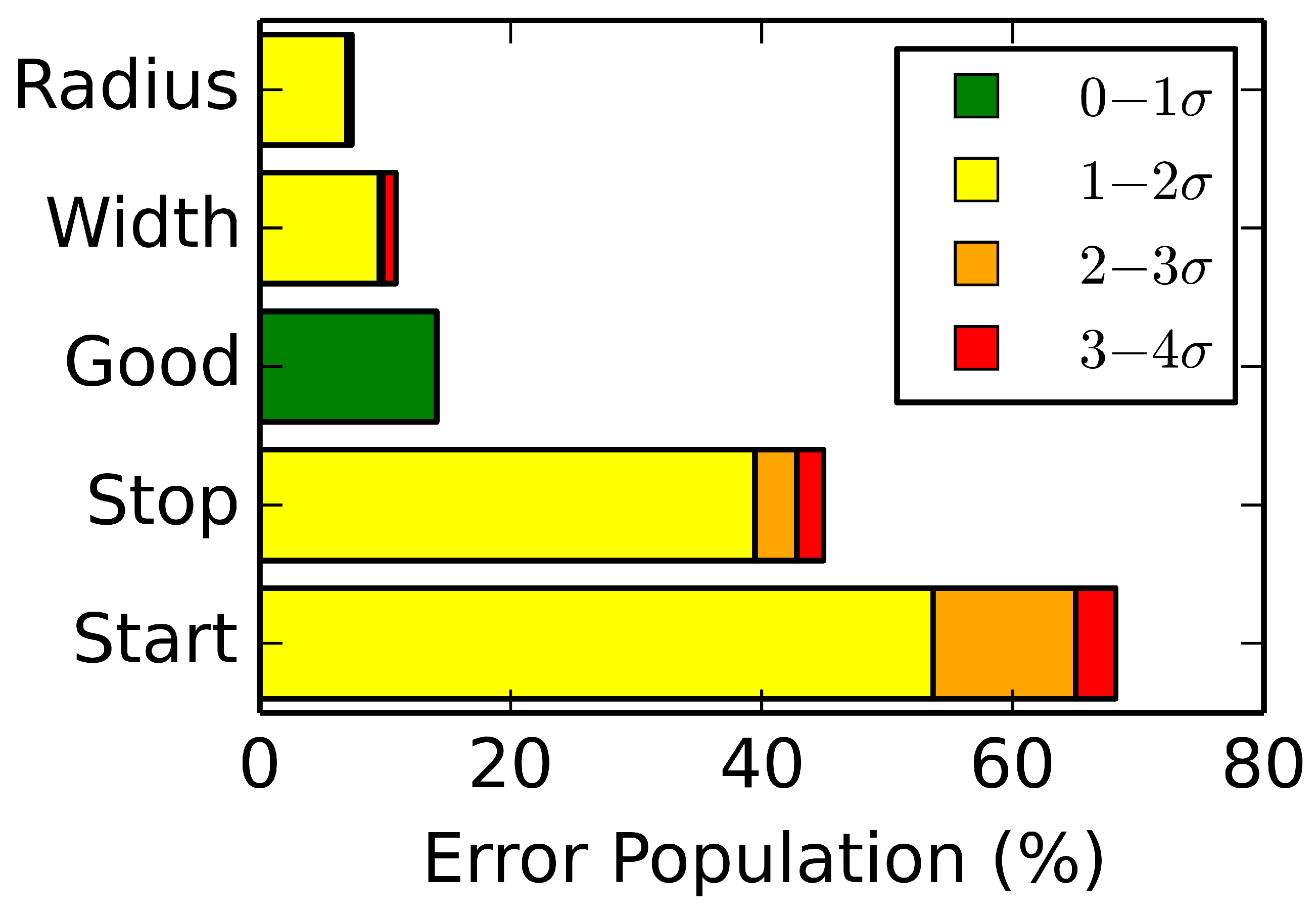
Figure A9 shows an error distribution of a single print job. Each bar shows a defect type and the colors correspond to the standard deviation from the target value for a percentage of spirals.
Figure A9.
Frequency error count of a single print job. Each color denotes the standard deviation and the bar denotes the percentage of spirals in the set that have a defect (center radius, arm width, stop, and start) and percentage of good spirals is noted in green.
Figure A9.
Frequency error count of a single print job. Each color denotes the standard deviation and the bar denotes the percentage of spirals in the set that have a defect (center radius, arm width, stop, and start) and percentage of good spirals is noted in green.
Appendix A.3. Impact of Geometry on RF Response
It is difficult to predict the aggregate effect of defects on the frequency response of the FSS a priori. To understand the effect of each defect on RF performance, we performed parametric simulations in Ansys HFSS using a single spiral unit cell with a range of arm lengths, arm widths, and center radii. A representative conductivity of 22,500
was used for the Ag-TPU ink. Over the range we tested, the primary effect of changing a parameter was to shift the frequency response to higher or lower frequencies. While the quality factor of the curves did change over the range of each parameter, the effect was comparatively small. This effect can be seen by the near parallel nature of the
dB and
dB contour outlines in
Figure A10.
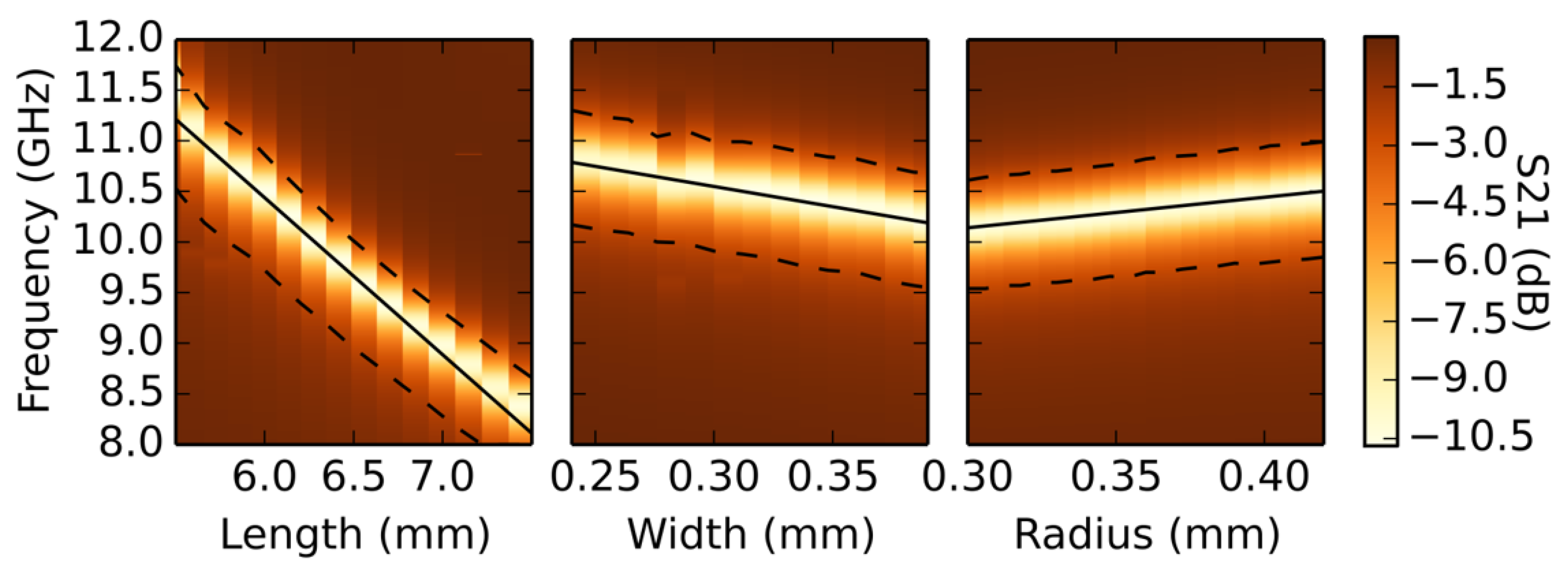
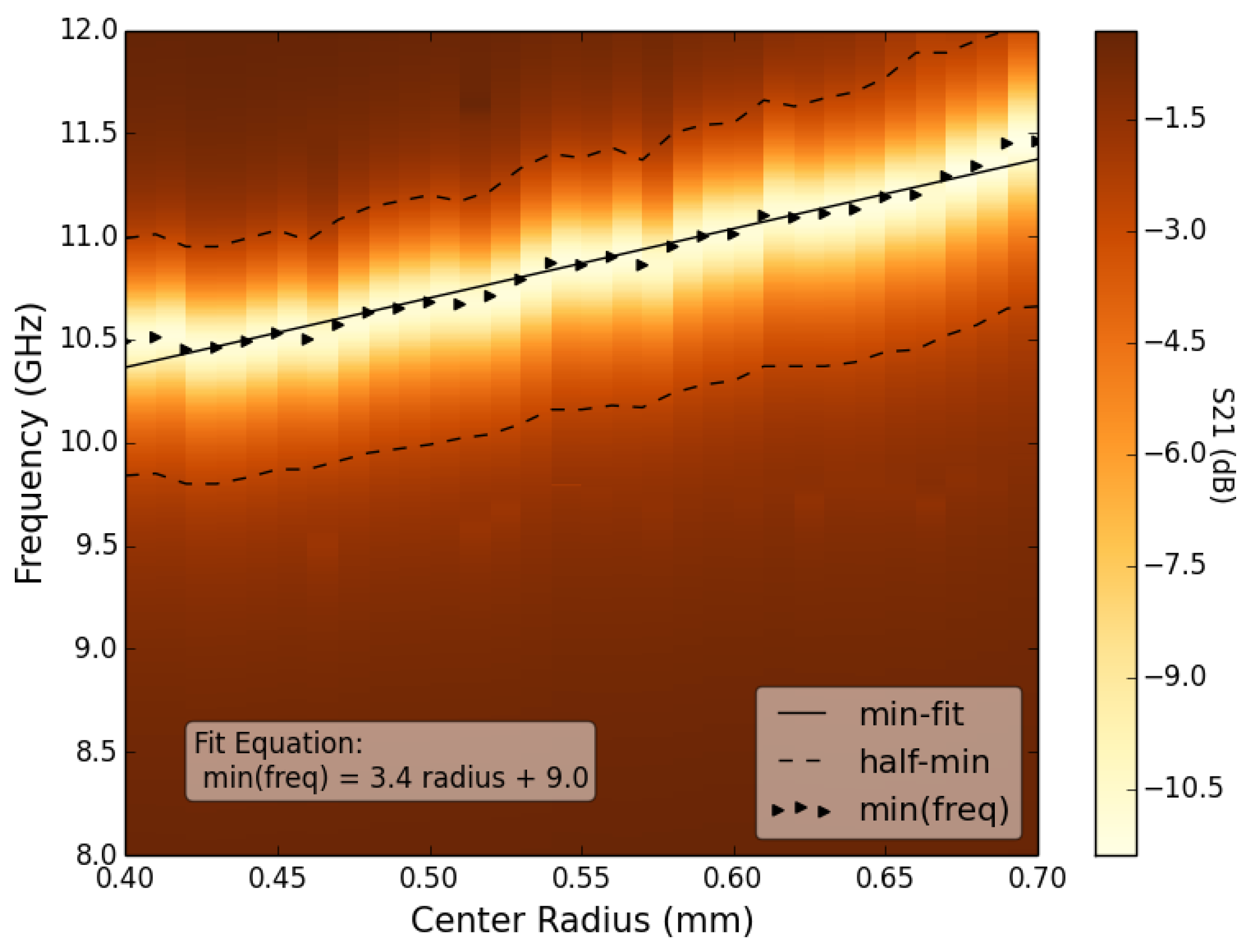
The frequency shift due to each parameter is summarized in
Figure A10, in which the color scale indicated the
of each simulated spiral structure, The solid black lines indicate a linear fit to the minimum frequency as a function of each parameter. The fits yielded slopes of
,
, and 3.01
for arm length, arm width, and center radius respectively. The fit equations for each parameter are presented in Equations (
A2). The slopes indicate that deviations in the width and center radius have a larger effect on the frequency of each spiral than the arm length. This would imply that the width and radius affect the frequency response most strongly; however, as seen in
Figure A5 the arm length varies several times more than the radius or arm width indicating that the arm length should widen the frequency response more than the width or radius.
Figure A10.
Composite simulated results of spirals with parametric sweep of arm length, arm width, and center radius. The regions outside the dotted black lines imply filtering above dB, the regions within the dotted black lines imply filtering below dB, the solid black lines denote the center frequency of the curve.
Figure A10.
Composite simulated results of spirals with parametric sweep of arm length, arm width, and center radius. The regions outside the dotted black lines imply filtering above dB, the regions within the dotted black lines imply filtering below dB, the solid black lines denote the center frequency of the curve.
A more detailed view of the arm length and center radius impact on RF response can be found in
Figure A11 and
Figure A12.
Figure A11.
Simulated RF Response of Spirals with Varying Arm Lengths. Color indicates in dB, triangles indicate the minimum points and dashed lines indicates half of the minimum value.
Figure A11.
Simulated RF Response of Spirals with Varying Arm Lengths. Color indicates in dB, triangles indicate the minimum points and dashed lines indicates half of the minimum value.
Figure A12.
Simulated RF Response of Spirals with Varying Center Radii. Color indicates in dB, triangles indicate the minimum points and dashed lines indicates half of the minimum value.
Figure A12.
Simulated RF Response of Spirals with Varying Center Radii. Color indicates in dB, triangles indicate the minimum points and dashed lines indicates half of the minimum value.
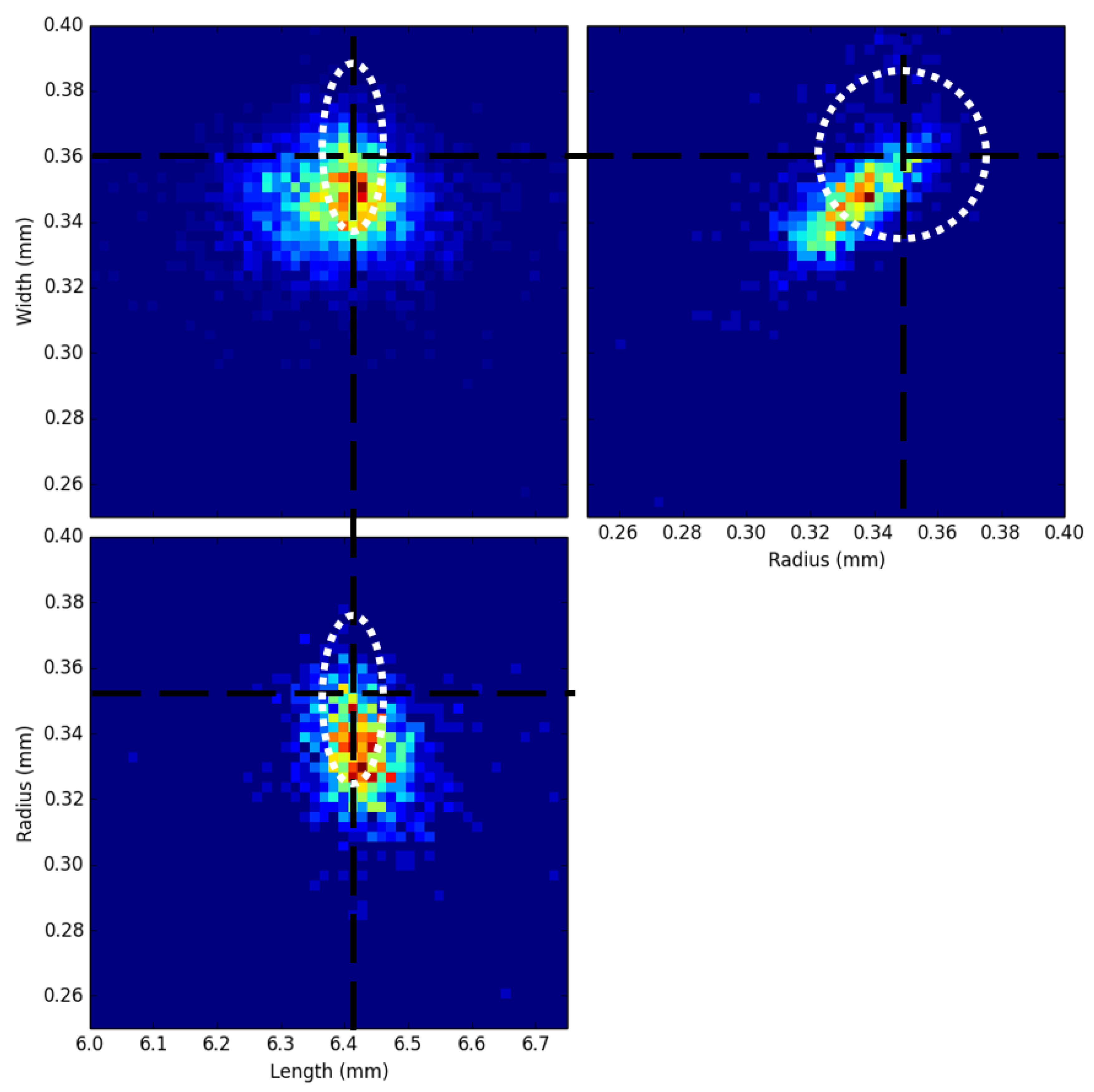
It is also worth noting that the geometric parameters are not fully independent when printed using an extrusion method.
Figure A13 shows the correlation between arm length, arm width, and center radius of the printed spirals. The color scale in the plot is normalized to probability density ranging from dark blue to red. The target values are indicated by the black dotted lines and the white dotted ellipses indicate the acceptable range of values. This plot shows that the radius and width have a strong correlation with one another while the length does not appear to have a strong correlation with width or radius, this does not imply the length is entirely independent.
Figure A13.
Correlation between arm length, arm width, and center radius. Color scale is normalized to probability density ranging from blue to red. Black lines indicate the target values and the white ellipses indicate the acceptable range.
Figure A13.
Correlation between arm length, arm width, and center radius. Color scale is normalized to probability density ranging from blue to red. Black lines indicate the target values and the white ellipses indicate the acceptable range.
As arm width increases, center radius increases as well, and as center radius increases the effective arm length decreases. However, given the opposing trends in
Figure A5, it is possible that variations in arm width and center radius will actually cancel each other out, if we assume that the frequency response of each parameter is largely independent of the state of the other parameters. We verified this assumption by running a small set of simulations in which more than one parameter was varied and comparing the simulated frequency response with those predicted by the fits in
Figure A10.
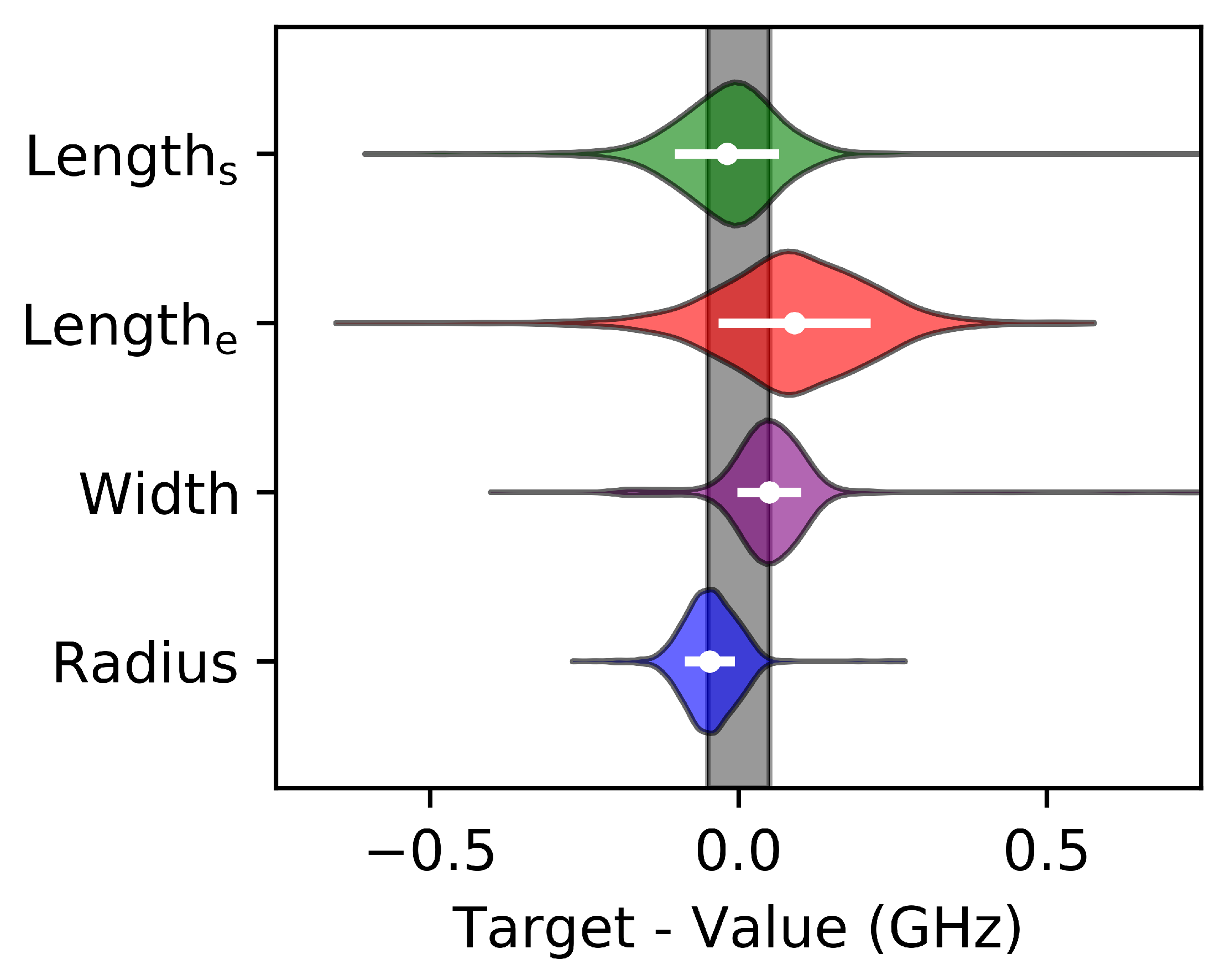
The fit equations from the simulated results in
Figure A10 map the geometric parameters into the frequency space. In this case, each equation yields a center frequency corresponding to each length, width, and center radius. The result of this mapping is seen in
Figure A14 which shows the shift from the target frequency, as calculated from the target parameters. Similar to the position results shown in
Figure A5 and
Table A1, the arm length has a wider distribution than either the width or radius. Notably, due to the negative slope of the fit equation derived from
Figure A10, the relative position of the starting lengths and ending lengths flips across the center axis. This correctly demonstrates that spirals with shorter arms have a higher center frequency.
Figure A14.
Violin Plots of the measured arm length, width, and spiral center radius. Mapped to frequency space by simulated results. Each parameter is normalized to the target center frequency with an acceptable common band indicated by the shaded grey area.
Figure A14.
Violin Plots of the measured arm length, width, and spiral center radius. Mapped to frequency space by simulated results. Each parameter is normalized to the target center frequency with an acceptable common band indicated by the shaded grey area.
The translation into frequency space widens the center radius and width distributions more than the arm-length distributions. This is because variations in width and center radius have more than twice the effect on the center frequency per m. However, the radius and width are expected to still have less of an effect on the center frequency of each spiral due to the high accuracy and repeatability of these parameters. Interestingly, the width and center radius have opposing effects on the center frequency of the spiral. While both the average width and center radius of the spiral populations were slightly smaller than the intended target value the width flips across the target frequency axis. This is of particular interest when considering that the width and center radius are not independent of each other, but rather tend to correlate due to both being governed by the amount of ink extruded. This suggests that errors in width and radius may cancel each other.
A 100 MHz bandwidth is shaded around the target frequency axis in
Figure A14 to indicate the region of frequency space in which spirals should have common bandwidth (below −10 dB) with a target spiral. Similar to a common impedance bandwidth, this is the region in which spirals will constructively help filter incoming radiation. Spirals with center frequencies outside of this region may increase the bandwidth, but will not improve the filtering (decrease
) at the target center frequency.
Table A2.
Center Frequency, Accuracy and Repeatability Values for a Printed Spiral FSS.
Table A2.
Center Frequency, Accuracy and Repeatability Values for a Printed Spiral FSS.
| Parameter | (GHz) | Accuracy (MHz) | Repeatability (MHz) |
|---|
| Length | 11.31 | | 173.92 |
| Length | 11.23 | | 104.45 |
| Radius | 10.35 | 0.95 | 80.38 |
| Width | 10.20 | 27.10 | 83.73 |
This analysis should help to understand how each printed feature is affecting the function of the FSS. If most of the parameters shift to one side or the other of
Figure A14 then the center frequency will vary from the target frequency. The repeatability of each parameter will impact the bandwidth and quality factor of the FSS. As the distributions widen, the quality factor will decrease. The bandwidth may increase, but this comes at the cost of decreasing filtering power.
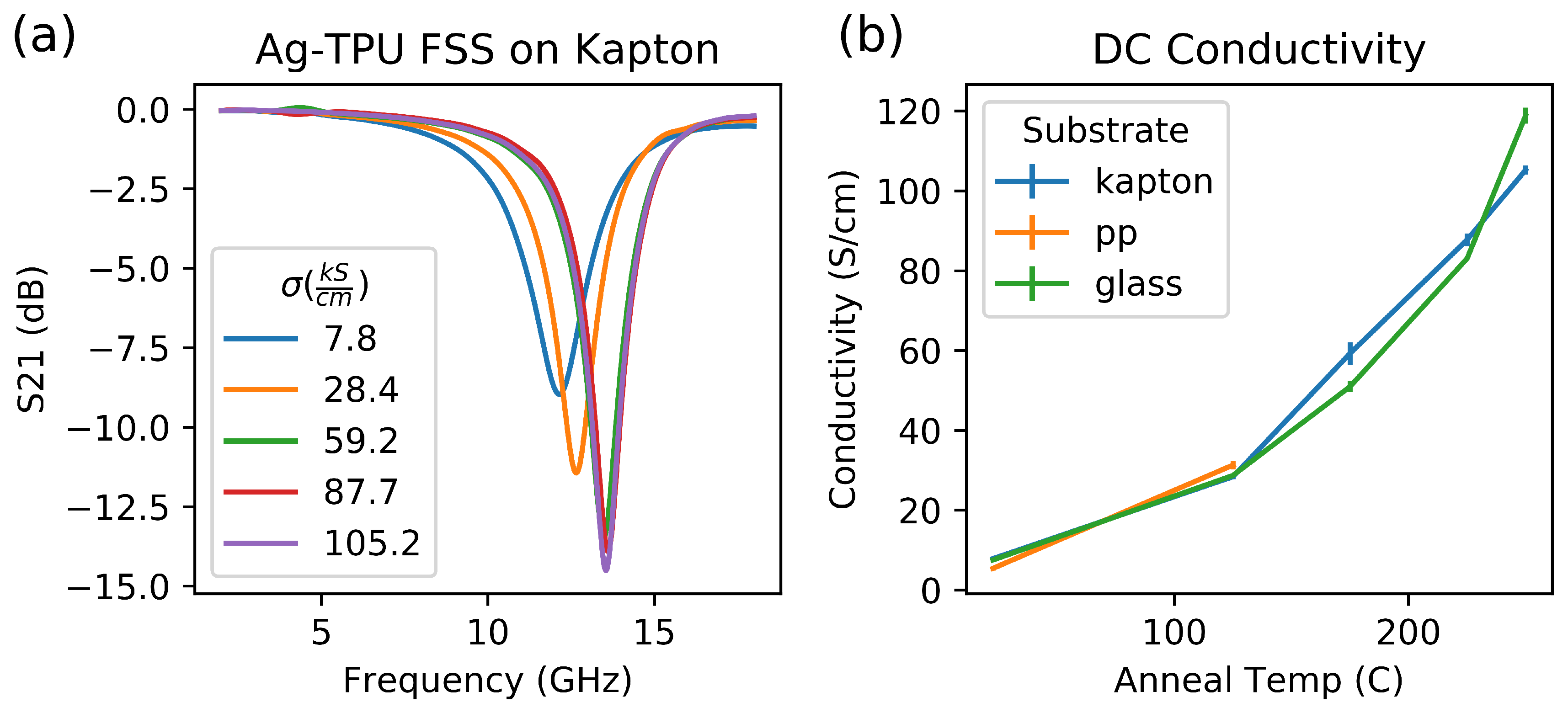
Appendix A.4. Impact of Material Properties on RF Response
In addition to process specific geometric defects, the conductive ink itself has variances in conductivity depending heavily on post-processing conditions.
Figure A15 references a small sample study of the impact in conductivity on the center filtering frequency of an ideal spiral geometry.
Figure A15b shows the measured DC conductivity of Ag-TPU on three substrates (Kapton, PP, and glass) at five processing temperatures. The PP substrate is limited by its melting temperature (160
C).
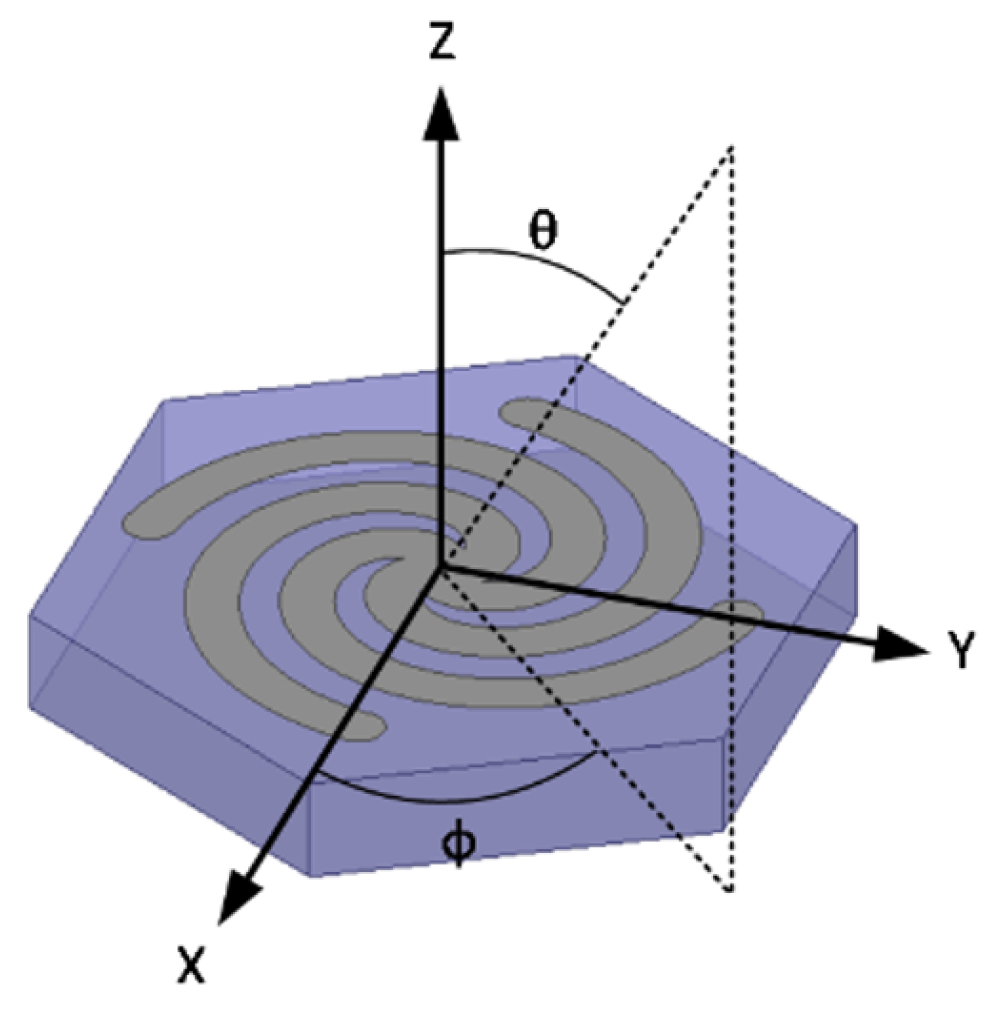
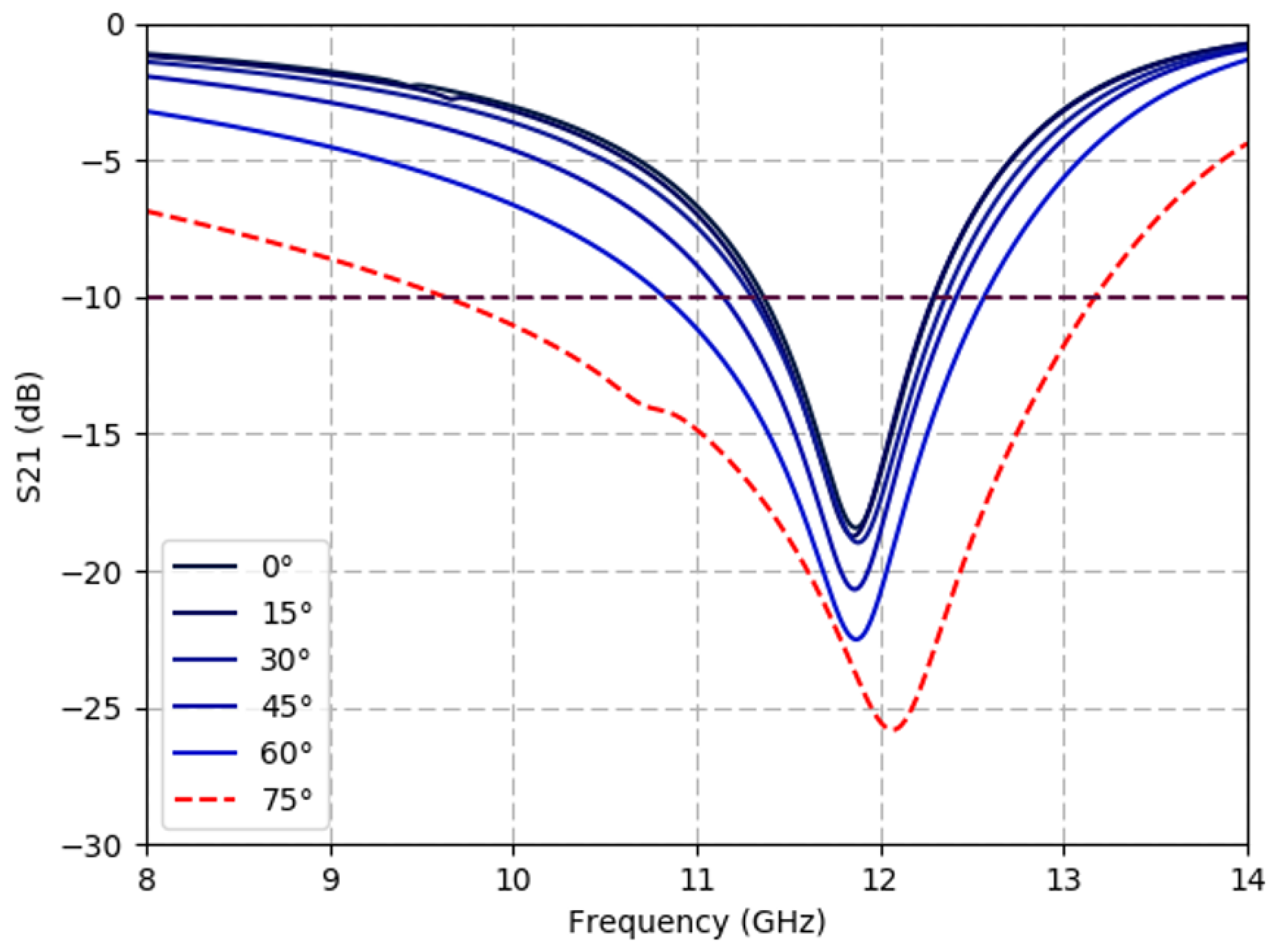
Figure A15a shows an ideal spiral simulated in an infinite triangular lattice as described in
Section 3. Each curve in
Figure A15a shows the simulated frequency response of a spiral on Kapton substrate with varying conductivity following the measured DC conductivity from the post processing conditions in
Figure A15b.
Figure A15.
(a) Simulated ideal spiral FSS response over 0–20 GHz while varying conductivity of Ag-TPU on a Kapton substrate at DC conductivity values, (b) Measured DC Conductivity of Ag-TPU on Kapton, polypropylene (PP), and glass as a function of annealing temperature. Note: PP annealing is limited by substrate melting temperature.
Figure A15.
(a) Simulated ideal spiral FSS response over 0–20 GHz while varying conductivity of Ag-TPU on a Kapton substrate at DC conductivity values, (b) Measured DC Conductivity of Ag-TPU on Kapton, polypropylene (PP), and glass as a function of annealing temperature. Note: PP annealing is limited by substrate melting temperature.
The wide range of conductivities from varying post-processing conditions and their corresponding responses imply a large impact on anticipated frequency responses in sample printed FSS structures. Varied post-processing temperatures and times can result in a change in conductive paths between silver particles in the ink. Additionally, when annealing elements on a PP substrate, the plastic substrate can deform despite being below the melting point of PP.

 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















