1. Introduction
Laser tracking technology has a wide range of applications in the fields of laser guidance [
1], space optical communication [
2,
3], optical tweezers [
4], and large size precision measurement [
5,
6,
7]. Compared with other non-contact positioning methods, such as wireless sensor networks [
8] and inertial navigation positioning [
9], laser tracking and positioning has the advantages of high accuracy and strong environmental adaptability. At present, laser trackers have been widely used in moving target tracking; its ranging accuracy has exceeded the sub-micron scale, and its measuring distance up to hundreds of meters. However, due to its complex structure, high precision, and large volume, the laser tracker has higher requirements for the environment, which is not suitable for general precision requirements and harsh environments, such as coal mines, tunnels, and large storage, etc. In addition, due to the high price, it is not suitable to build a measurement network for multiple laser trackers.
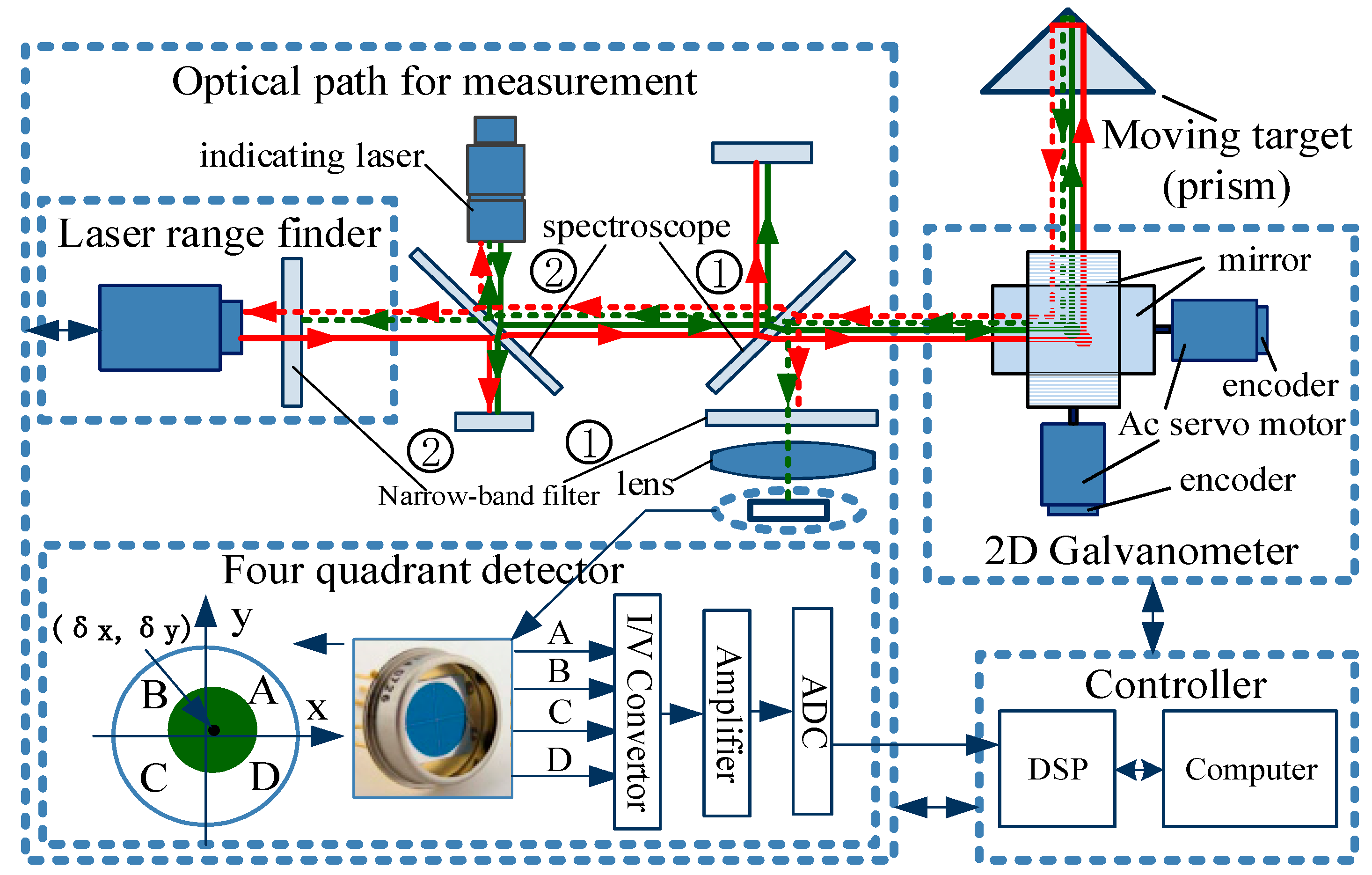
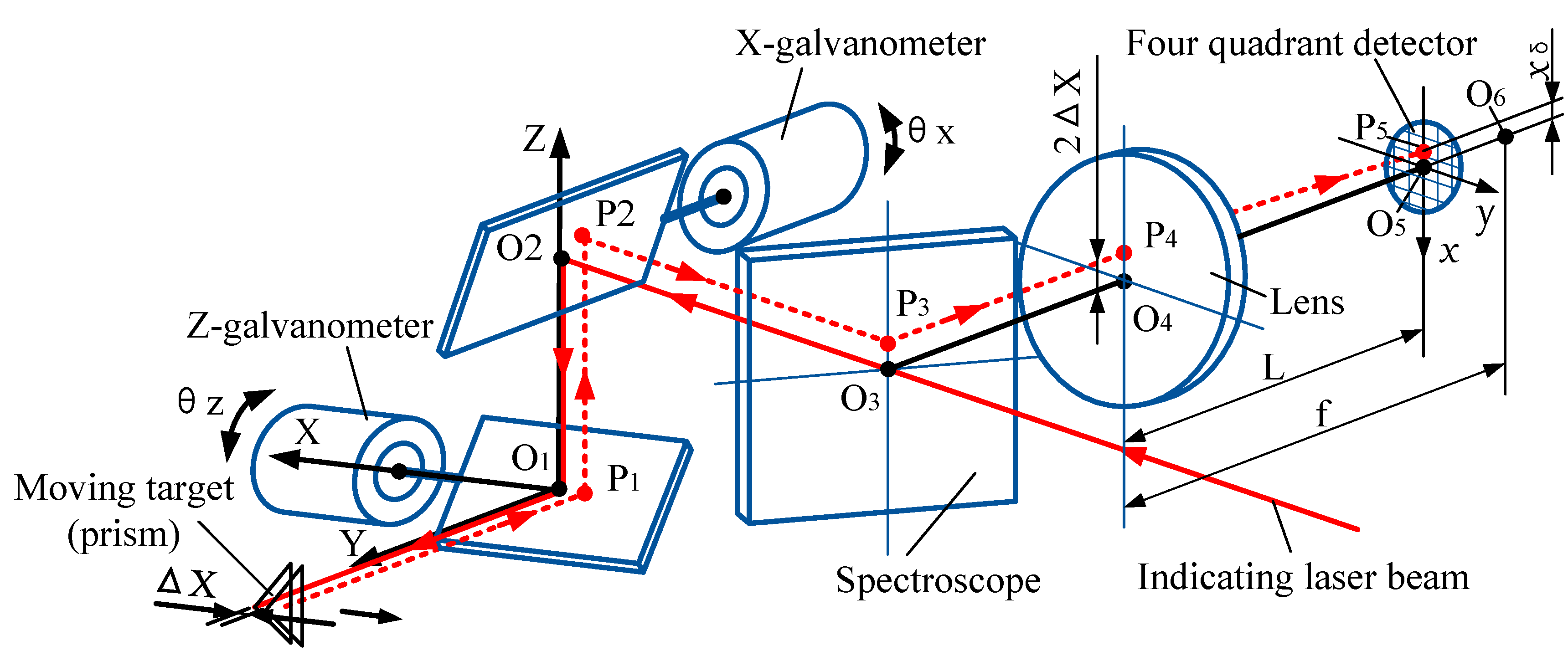
In this paper, a low-cost device for moving target tracking based on a two-dimensional (2D) galvanometer is studied, which is called a laser tracking and positioning system (LTPS). It uses a four-quadrant detector (4-QD) to get the position information of the laser spot that has returned from the moving target, and adjusts a 2D galvanometer to change laser direction, and then the target tracking function is realized. For the whole system, the accuracy of spot position detection directly determines the tracking and positioning performance. In order to improve the detection accuracy of the 4-QD, scholars have done a lot of research on the algorithm of spot position detection. Chen [
10] and Vo [
11] used the polynomial fitting algorithm to study the nonlinear relationship between the detection signal and the spot position. Through experiments, the relationship between the spot position and the output voltages of 4-QD was obtained, and the curve was fitted with a high-order polynomial. Salmanpour [
12] proposed a nonlinear correction method based on a BP (Back Propagation) neural network for 4-QD to calculate the spot position. Lee [
13] studied the method of calculating the spot position of Gaussian energy distribution, and found that for different spot diameters, the sensitivity of the detector increases with the decrease of spot radius. Lu [
14] explored the detection method of an annular light spot and studied it using the annular segmentation integral method. Li and Xu [
3] used cosine modulated light and a cyclic cross correlation method to detect the spot position, and obtained the accurate signal amplitude and improved the precision. Wu [
15] used the Boltzmann function to construct the spot position curve to improve detection accuracy. In addition, Xiao [
16,
17] and other scholars have made in-depth studies on the theory and method of multi-sensor information fusion. These methods can also be a feasible way to improve the spot position accuracy of a laser tracking system.
Most of the existing methods use the idealized model and treat the shape of the spot as an approximate circle, and regard the energy distribution as a uniform distribution or Gaussian distribution. Under this assumption, the spot position detection methods are studied by analytical methods. For the LTPS presented in this paper, the shape and energy distribution of light spots are irregular, and there are many factors affecting the accuracy of spot position detection. Therefore, it is difficult to establish an accurate model using traditional analytical methods.
For LTPS, the factors that affect the accuracy of spot position detection are mainly divided into two categories. One is the inherent errors of the system, the other includes random errors. The inherent errors mainly include the model error of spot position detection, the four quadrant inconsistency error, the optical adjustment error, the optical element distortion error, and so on. The random errors mainly include the conversion and amplification noise, the background noise, the sampling errors of output signals and other noise caused by speckle energy fluctuation, electromagnetic interference, temperature drift, dust and atmospheric turbulence etc. It is not easy to use analytical methods to establish the mathematical model to study spot position detection. Therefore, experimental analysis methods will be used to study the improving method. In order to establish the spot position detection model with a simple algorithm and fast processing speed, the piecewise low-order polynomial fitting algorithm is adopted to fit the experimental data, and the fitting curve between the output voltages of the 4-QD and the spot position satisfying the tracking accuracy of the system is obtained, which can be used as the improved model to compensate for the inherent errors. For the random errors, the real-time Kalman filtering algorithm is proposed to filter the output voltages of the 4-QD to reduce the influence of various random errors. The improved method proposed in this paper takes the output values of the Kalman filter as the best estimate of the true output voltages of the 4-QD. Then, the filtered voltages are put into the low-order polynomial fitting curves to obtain the high-precision spot position values. The system takes the spot position value as the position feedback signal, controls the 2D galvanometer, adjusts the angle of laser injection, and realizes the tracking and positioning of moving objects.
In this paper, an improved method for spot position detection of LTPS is presented. In
Section 2, the principle of LTPS, the mathematical model of tracking and positioning, and the experimental system are introduced. In
Section 3, the traditional methods of spot position detection are described. In
Section 4, the improved method based on spot position detection using piecewise low-order polynomial least squares fitting and the Kalman filter are introduced in detail. In
Section 4, the results of moving target tracking and positioning experiments are analyzed. Finally, the conclusion is given in
Section 5.
3. Spot Position Detection Method
3.1. Spot Position Detection
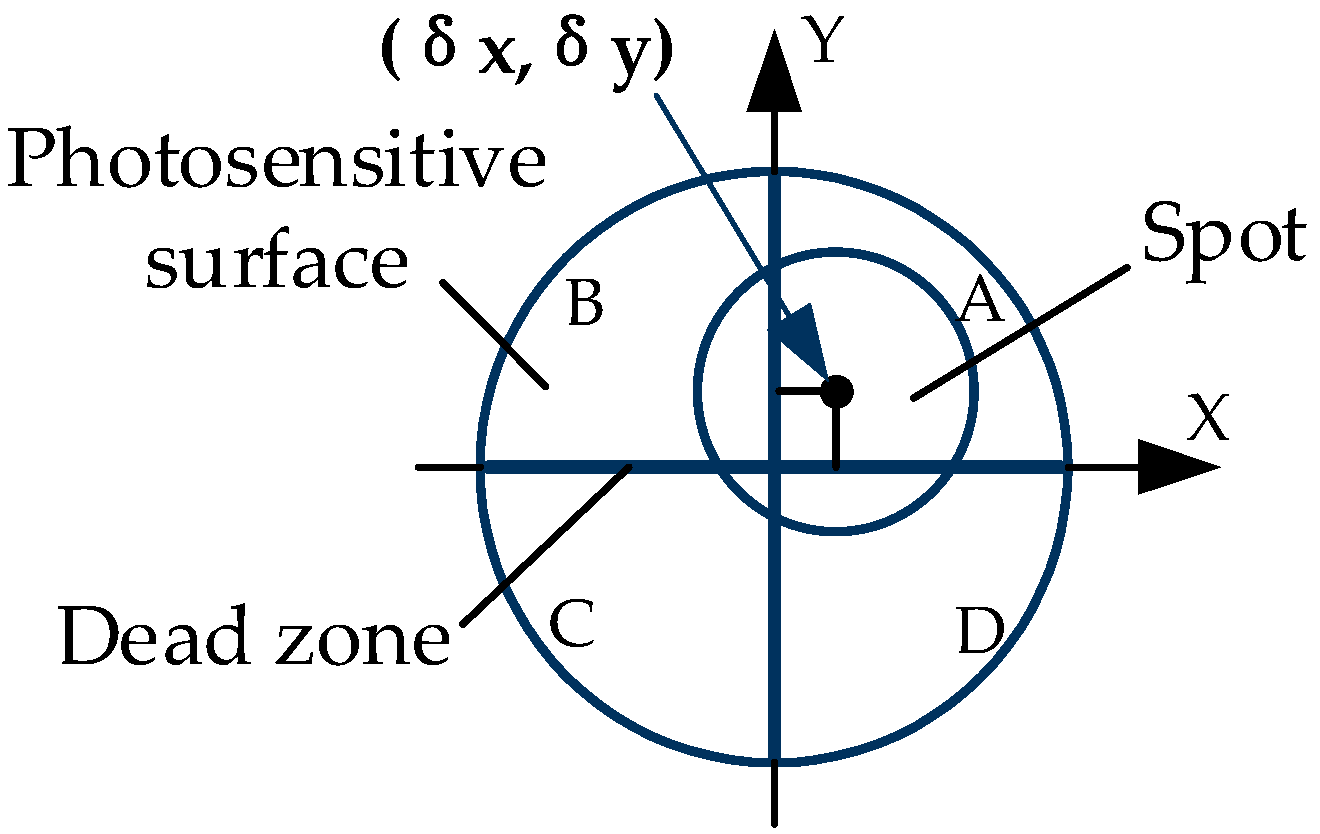
The principle of the 4-QD is shown in
Figure 4. The photosensitive surface of the detector is divided into four regions (A, B, C, D) with the same shape and area by the dead zone. When the detector works, the laser beam reflected by the target prism is concentrated on the photosensitive surface of the 4-QD through the optical system, and the centroid coordinate of the spot is
. At this time, the energy received in each quadrant of the 4-QD is
. When the spot moves on the photosensitive surface, the energy received by each quadrant will change correspondingly with the displacement, leading to the change of the output photocurrent. The centroid coordinate of the spot can be calculated by the energy in each quadrant according to Equation (6) [
19]:
where
are the true positions of the spot;
are the centroid coordinates of the spot;
is the proportional coefficient related to the spot;
and
are the normalized values calculated for the spot center position, and
.
3.2. Traditional Detection Method
The centroid coordinate of the spot is related to energy distribution of the spot. With different energy distributions, the centroid coordinate of the spot calculated according to Equation (6) will have different errors.
- (1)
Uniform distribution of spot energy
Sometimes, in order to simplify the problem, the spot energy distribution is considered to be uniform. In this case, the photocurrent in each quadrant is proportional to the received energy of the spot. The position of the spot can be estimated by the output voltages of the four quadrants’ photodiodes according to Equation (7) [
20].
In the formula, is the output voltage of the four quadrants’ photodiodes, which is proportional to the received energy of each quadrant.
This method only uses simple algebraic operations and has less computational complexity. It is easy to implement in microprocessors and has a faster speed. However, because the spot energy does not obey uniform distribution strictly, the accuracy of the spot position calculated by this method is not high.
- (2)
Gaussian distribution of energy
Compared with the uniform distribution, the spot energy is closer to the Gaussian distribution. The center of the spot has the strongest energy, which is circular and diffuses outwards, and gradually weakens when leaving the center. If the coordinate of the center is denoted by
, and the light intensity value on the photosensitive surface is denoted by
, then the probability density function of the spot energy equivalent to the 2D Gauss distribution, as is shown in Equation (8) [
21].
In the formula, is the total energy of the spot and is the beam waist radius of laser energy distribution.
For the Gaussian spot, more than 90% of its energy is concentrated in the circle with a radius of 2σ. Therefore, the total energy of the spot with Gaussian energy distribution can be approximated by an infinite integral, as shown in Equation (9).
The radius of the photosensitive surface of the 4-QD is R. Assuming that the light energy outside the photosensitive surface of the spot is ignored, the upper and lower limits of the integral can be set to infinity, then the following formula can be obtained [
22]:
Equations (10)–(13) are introduced into Equation (6), and the formula for calculating the spot position with Gaussian distribution is obtained. The Gaussian distribution method can obtain better accuracy than uniform distribution, but the calculation time is longer due to the complexity of integral calculation.
3.3. Spot Position Detection of the LTPS
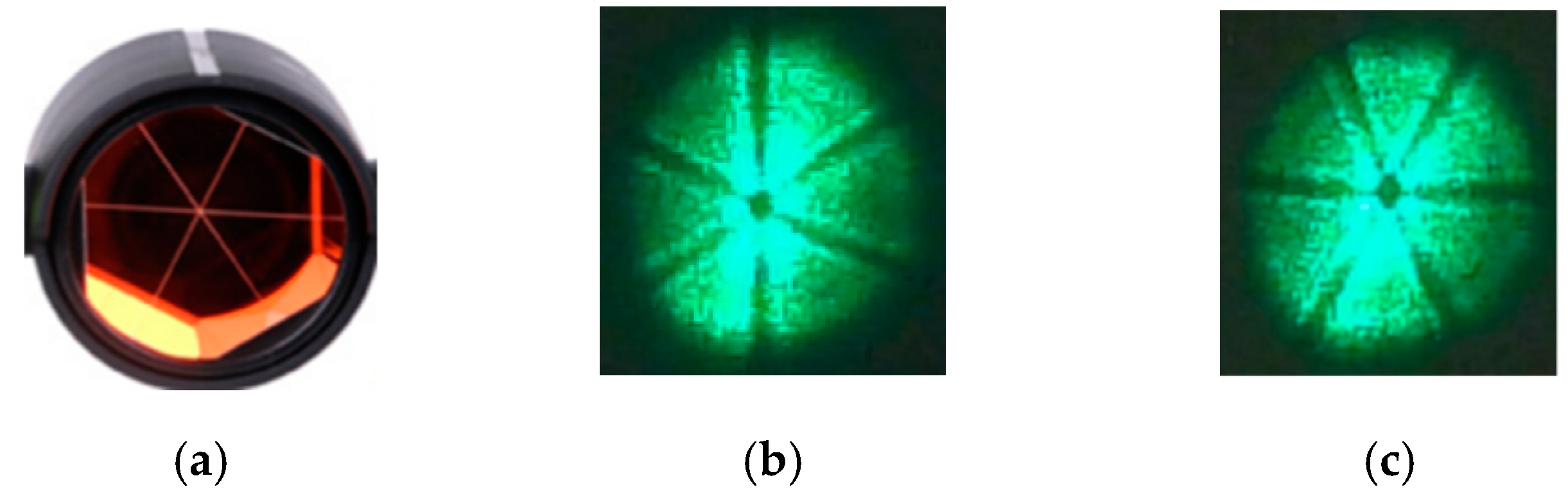
For the LTPS described in this paper, the prism was used as the target reflector, as shown in
Figure 5a. When an incident laser is reflected by a prism, its shape and energy distribution will change. The shape of the spot reaching the surface of the 4-QD is shown in
Figure 5b,c.
As can be seen from
Figure 5, due to the reduced reflection effect of the vertex and edge of the prism, there are six strips of dark areas in the center of the reflected light, the shape of which coincides with the shape of the prism. Thus, the distribution of spot energy is not uniform and no longer conforms to the Gaussian distribution. When the prism moves with the target, these strip dark areas fluctuate between the positions shown in
Figure 5b,c.
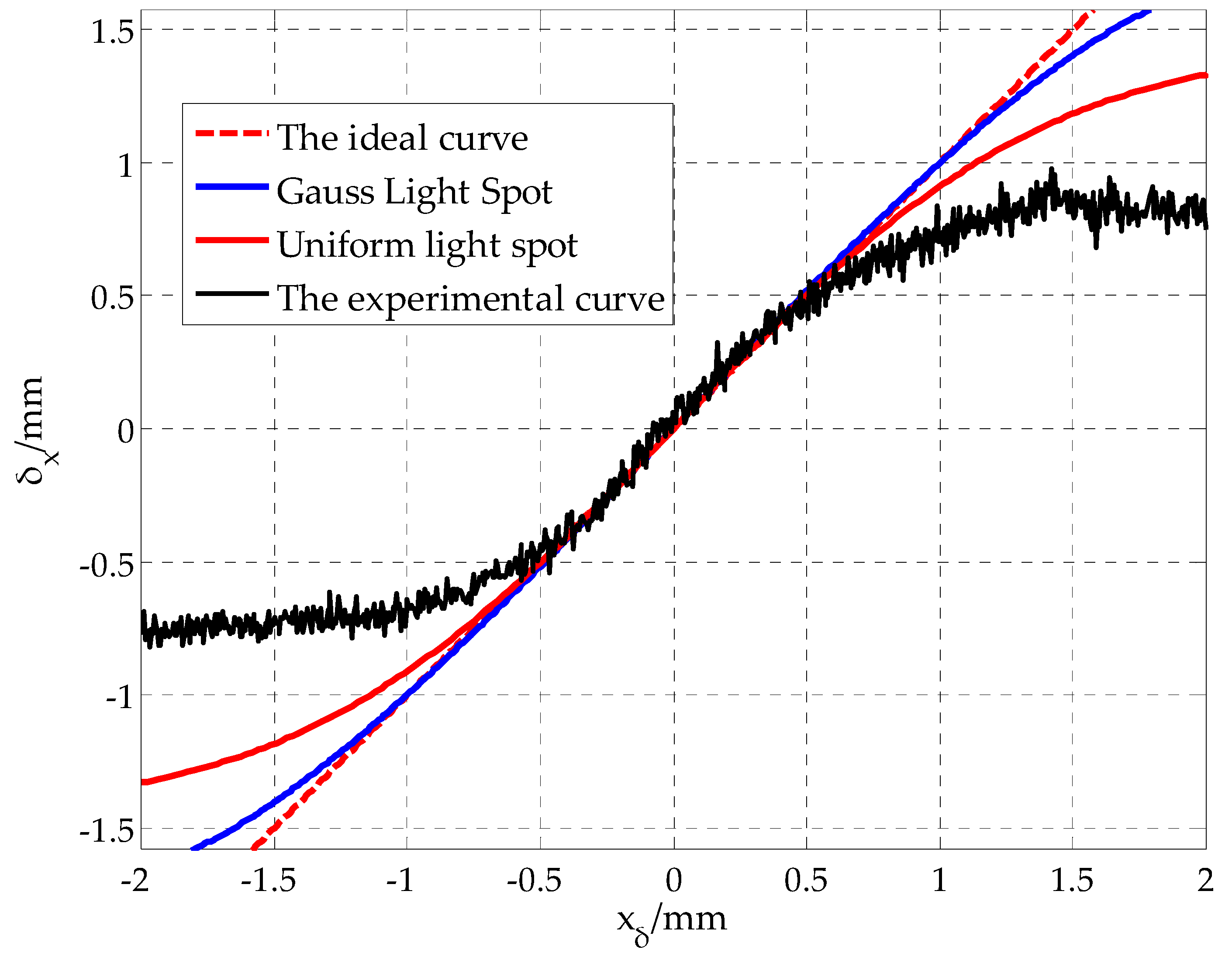
Taking the spot position in X-direction as an example, for a given theoretical
value, the spot position
is calculated by uniform distribution and Gaussian distribution, respectively, and then the two simulation curves of
are drawn, as shown in the red and blue curves in
Figure 6.
Data acquisition experiments were carried out, and by moving the 4-QD on the precise displacement platform, the output voltage of the detector
and the actual displacement of the spot
were collected synchronously. The calculated value of the spot position
was obtained by introducing type (6), then the experimental curve
was obtained, as shown in the black curve in
Figure 6.
Through comparative analysis, if the spot is regarded as an ideal circular spot, the strip dark areas are neglected, and the effects of various inherent errors and random errors of the system are not considered; there is an obvious error between the spot position calculated by the traditional method and the actual spot position. Similar problems exist in the Y-direction of the 4-QD as in the X-direction. Therefore, in order to get the spot position with high accuracy, the influence of spot shape distortion, system inherent errors, and random errors should be considered comprehensively, and the traditional methods should be improved.
4. Improved Method for Spot Position Detection
4.1. The Improved Method
Because of the existence of inherent errors and random errors, the traditional calculation method of Equation (7) has a large error. The improved method takes measures to reduce the impact of the two kinds of errors. Because the experimental data has implied various spot position errors caused by the spot shape, strip dark area, and various inherent errors, the analytical equation between and can be established by fitting the experimental data , and the fitting curve can be used as a high-precision spot position detection model. For the output voltage fluctuation caused by random errors, a Kalman filter can be used to obtain the best estimation of the output voltage from a series of data with noise when the variance is known, so as to reduce the noise and improve the detection accuracy.
The schematic diagram of the improved method for spot position detection is shown in
Figure 7. The experimental curve
of the 4-QD was fitted in the effective detection area. Because the high order curve is not suitable for real-time processing by the microprocessor, the piecewise low-order polynomial least squares fitting was used to fit the experimental data
, and then the piecewise curve fitting equation
was obtained.
In each tracking period, the system sampled the four-channel voltages of the detector for n times to obtain the sampling value . The Kalman filtering algorithm was adopted to filter the output voltages, and then Equation (6) was used to obtain the calculation value of the spot position. Putting into the piecewise curve obtains the high precision spot position value . Since the X-direction and Y-direction of the 4-QD are independent from each other, the improved method in the Y-direction is the same as that in X.
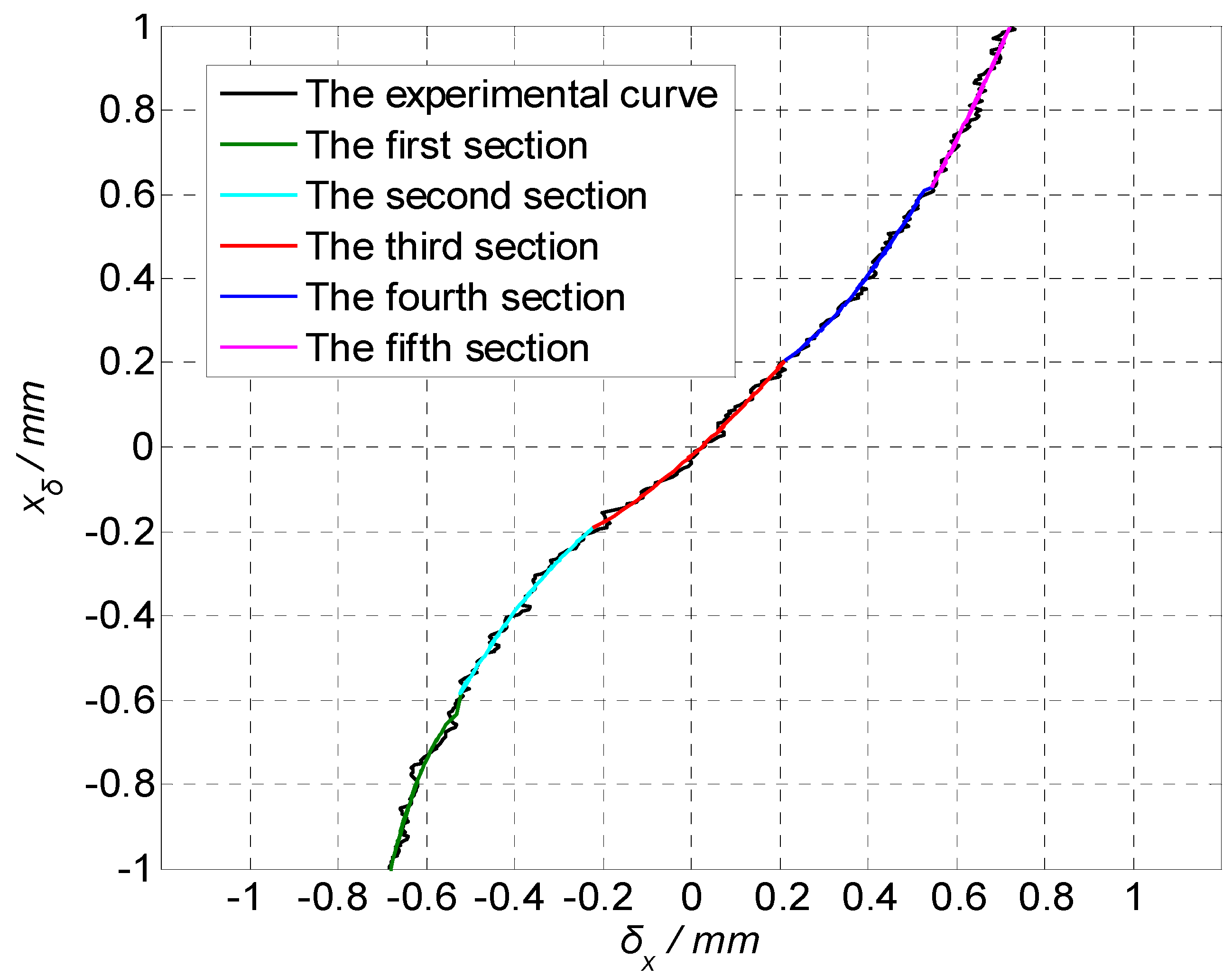
4.2. Piecewise Low-Order Polynomial Least Squares Fitting
From the experimental curves, it can be seen that the actual position of the spot has a non-linear relationship with the calculated value of the spot. If the whole curve is fitted, the degree of the fitting curves satisfying the accuracy is higher, which is not suitable for microprocessor processing. In this paper, piecewise low-order polynomial least squares fitting was used to reduce the degree of the polynomial by increasing the number of sections, so as to ensure the fitting accuracy.
For the experimental data
, it can be divided into several parts. For any part, let the data set be
, and the process of curve fitting is to find the least squares fitting function
in the polynomial function
, so as to minimize the sum of square error
, that is:
Here,
is a function of polynomials of no more than
. The upper formula is to find
, so that:
The normal equations can be obtained from the above formulas:
The least squares fitting polynomial
can be obtained by solving
from the above equation. The fitting error is:
In each control cycle of the LTPS, the output voltages of the 4-QD are sampled in DSP, and the spot position is calculated according to Equation (6). Then, the spot position is introduced into the least squares polynomial function , and the high precision position value of the spot in X-direction can be quickly calculated.
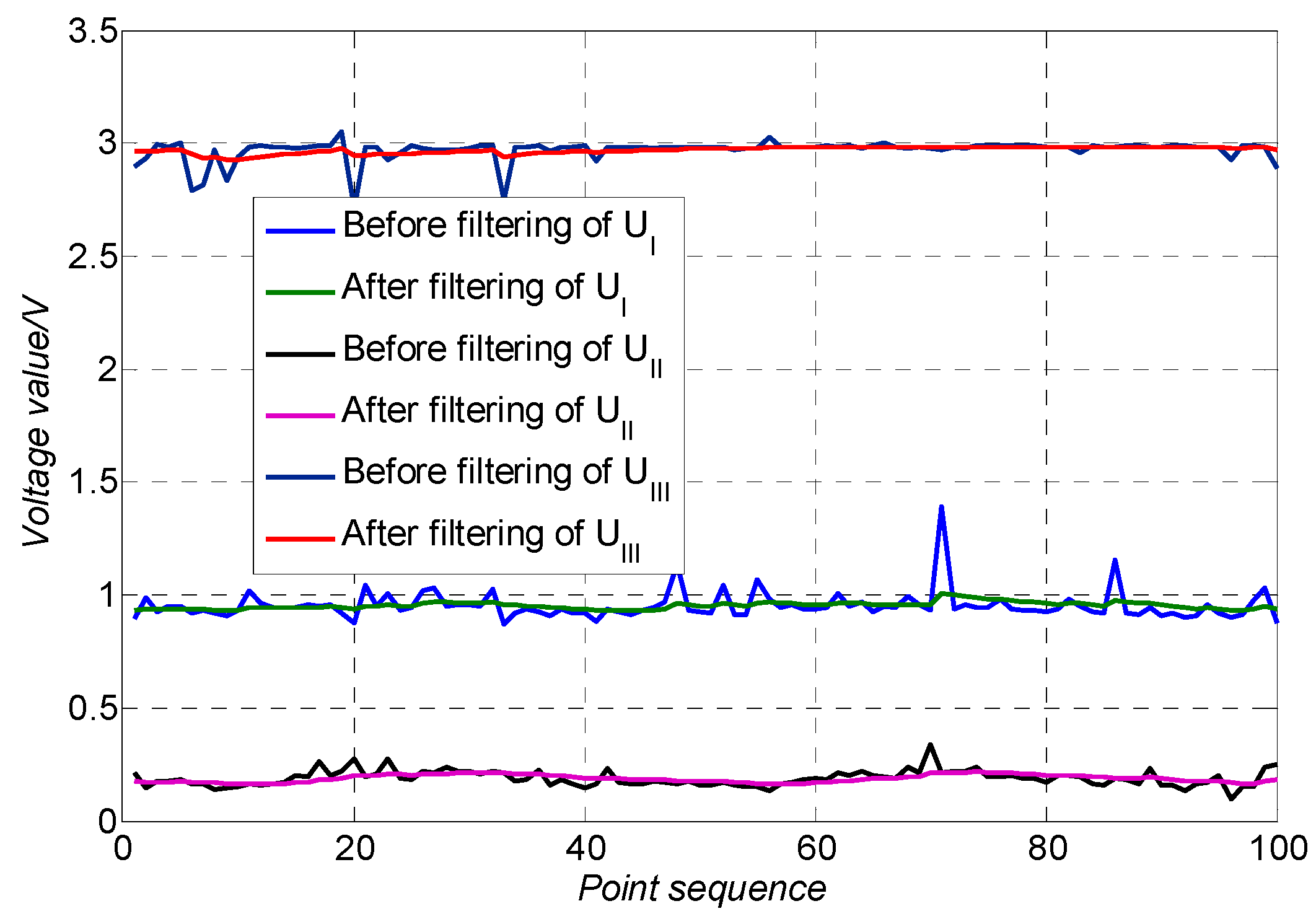
4.3. Kalman Filtering
The main random factors that affect the output voltages of the 4-QD can be regarded as Gaussian white noise. A Kalman filter was used to filter the output voltages, which can effectively reduce the influence of noise.
The fluctuation of the output voltages of the 4-QD with time can be regarded as a dynamic process, and the state space model as follows is used to describe the state fluctuation of the output voltage of the 4-QD.
Observation equation:
where,
is discrete time;
is the state of detector output signal
at time
;
is the state transition matrix;
is the noise driving matrix;
is the observation signal at corresponding time;
is the observation matrix;
is the input noise;
is the observation noise. The random noise
and
that cause the fluctuation of the output signal can be considered as irrelevant white noise whose mean value is zero and variance is
and
, respectively.
The core of the Kalman filtering algorithm is to use the observation quantity to estimate the state value. It can be divided into prior estimation and posterior estimation, which are respectively called the prediction part and update part [
23,
24]. Therefore, the algorithm was divided into the following three parts.
Here, is the system state estimate at the last time; is the state of time k + 1 predicted according to the state of time k; is the predicted covariance value; is a one-step prediction value of the system state; is the Kalman gain; Kalman innovation; is the covariance value at time k + 1.
From the flow chart of the algorithm, it can be seen that the prediction part is to predict the state of the system one-step with the observation of the previous moment, and the update part is to estimate the state of the next moment with the one-step prediction value of the state and the observation value of the current moment, and revise the updated value of the time. The main framework of the Kalman filtering algorithm is a cycle consisting of prior estimation and posterior estimation.
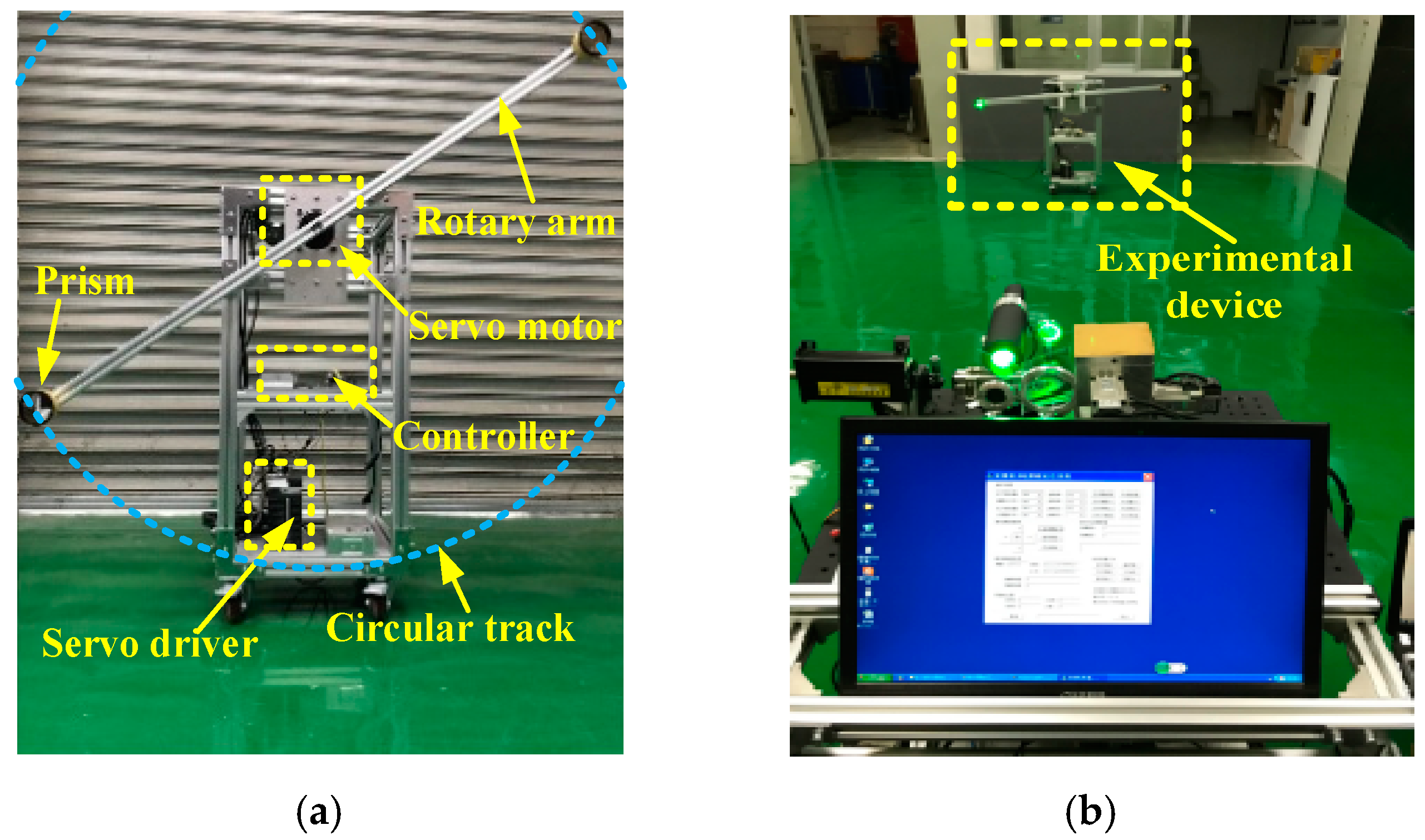
4.4. The Controlling Algorithm of the Improved Method
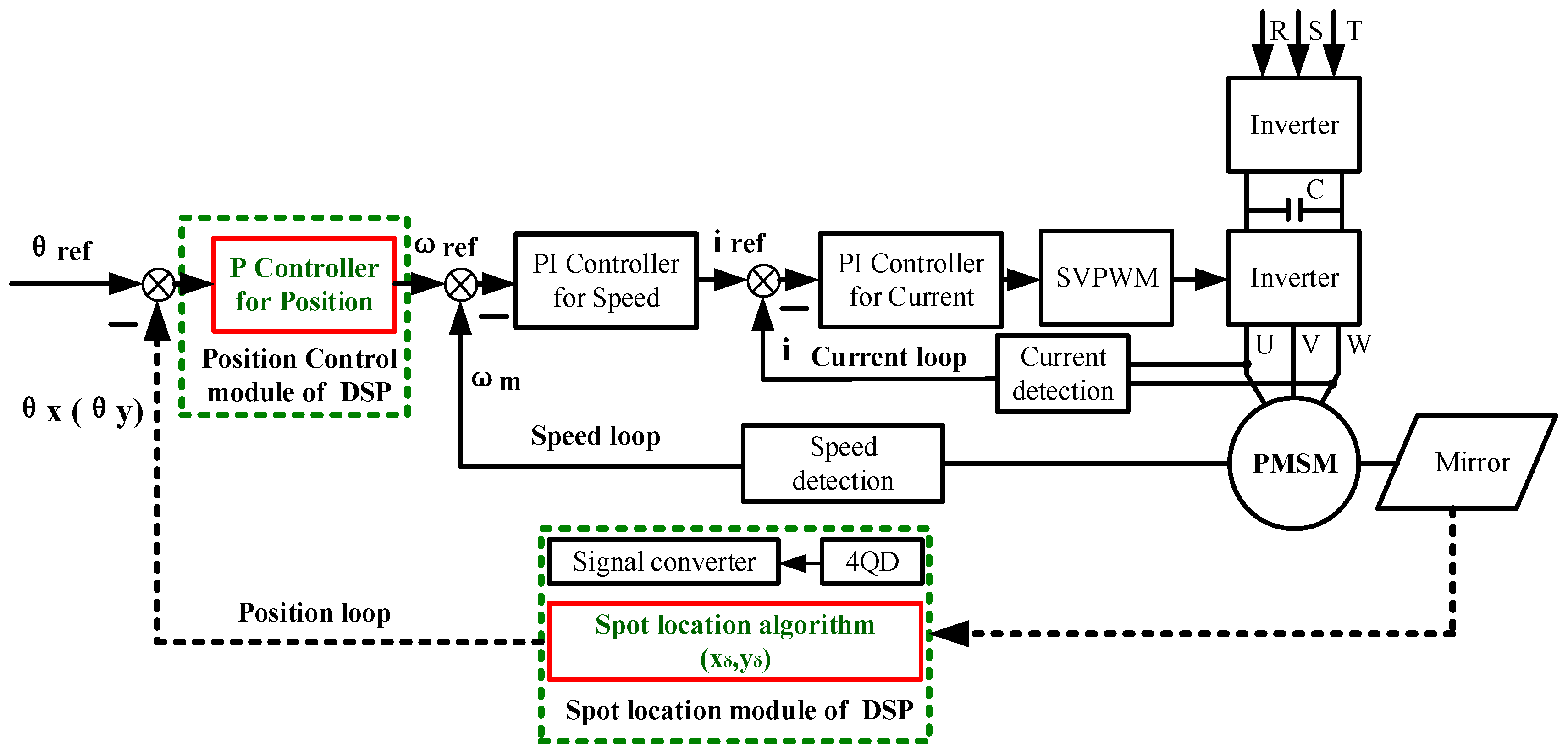
A full closed-loop of the AC servo system was adopted to control the 2D galvanometer and to realize real-time tracking of moving objects. The schematic diagram of the control system is shown in
Figure 8. In this system, the permanent magnet synchronous motor (PMSM) is used as the AC servo motor, and the space vector pulse width modulation (SVPWM) is used to control the servo motor.
The AC servo motors of each galvanometer adopt three closed-loop control modes, in which the current loop and speed loop adopt PI (Proportion-Integration) control mode and are completed in the servo driver. The position loop adopts proportional control mode, and the angles of the 2D galvanometer (θx, θz) were calculated by DSP accordingly, and will be used as the feedback signal to form the closed-loop control.
The position loop control program was also implemented in DSP, and three tasks were mainly completed in each cycle. The first is to determine which section of the fitting curve the spot is located in, according to the spot position , and enter the corresponding control program. The second is to calculate the three parameters needed to generate the position command pulse. These parameters include the proportional control coefficient , the number of pulses , and the pulse frequency , which are used to determine the fast responsiveness, tracking quantity, and tracking speed, respectively.
During the position control of the system, the gain of the position loop varies proportionally at different distances. The command pulse parameters of position control are as follows:
In the formula, is the position loop gain at the distance L; P0 is the gain of the position loop at the known reference position; L is the target distance.
The number of command pulses is calculated as follows:
In the formula, is the number of pulses of the X-axis galvanometer; θx is the angle of the X-axis galvanometer; is the number of pulses of the Z-axis galvanometer; θy is the angle adjustment of the Z-axis galvanometer; N is the number of pulses required for each rotation of the servo motor.
When the spot is at
position, the command pulse frequency is calculated as follows:
In the formula, is the tracking angular velocity; is the highest tracking angular velocity of the system (influenced by system hardware, servo system performance, and tracking control algorithm); R is the effective photosensitive surface radius of the 4-QD; is the command pulse frequency.
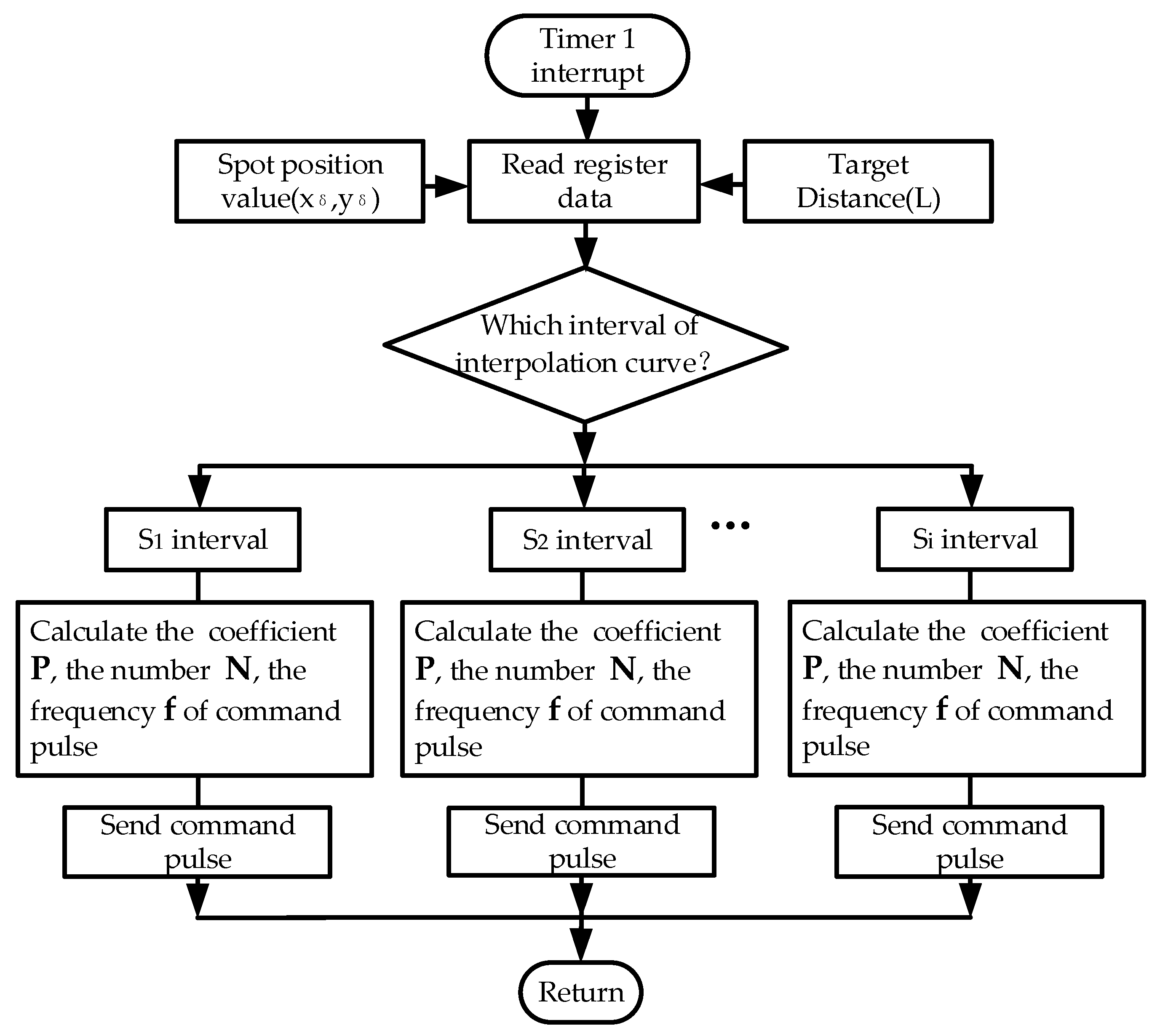
The function of the real-time tracking program is realized in DSP. In order to improve the real-time performance of the control program, the interrupt mode was adopted. The flow chart of the tracking program is shown in
Figure 9.
The tracking program is mainly divided into 5 steps. The first step is interrupted by Timer 1 to enter the position control program and to read and . In the second step, according to the spot position value, enter into a different segment curve interval. In the third, according to the corresponding interval, calculate the parameters, including the gain of position loop, the number of command pulses , and the command pulse frequency . In the fourth, generate the control command pulse corresponding to the segment curve interval. In the fifth, complete a position control cycle and return to the main program.
6. Conclusions
In this paper, a tracking and positioning system for a moving target was constructed, and a mathematical model of tracking and positioning was established. Aiming at the problem of low precision and poor real-time performance of traditional methods, an improved method of spot position detection based on a piecewise low-order polynomial least squares fitting algorithm and a Kalman filter algorithm was proposed. For the collected experimental data of the spot position, the detection curve of the spot position was established using a 5-segment quadratic polynomial least squares fitting. Aiming at the problem of high noise and low sampling accuracy of output voltages of the detector, a Kalman filter algorithm was proposed to improve the detection accuracy. The system experiment platform and rotation tracking test bed were established, and the tracking experiment was completed. The experimental results of the traditional method and the improved method were compared and analyzed. The results show that the polynomial fitting with the 5-segment and quadratic polynomial can not only meet the fitting accuracy, but also has a faster calculation speed, which is suitable for real-time processing by a microprocessor. A Kalman filter can significantly reduce the noise of 4-QD output voltages and improve the detection accuracy. The experimental results of rotation tracking show that the maximum tracking distance of the system was increased from 12 m to more than 30 m. At 23.5 m, the maximum tracking speed was 1.13 m/s, and the RMSE was less than 5.71 mm. Therefore, the improved method based on the 5-segment quadratic polynomial least squares fitting and the Kalman filter can effectively remedy the shortcomings of traditional methods, improve the accuracy of spot detection, and significantly improve the performance of the laser tracking and positioning system.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}