Smartphone-Based 3D Indoor Pedestrian Positioning through Multi-Modal Data Fusion

 , ,
, ,
Abstract
:1. Introduction
2. Related Work
3. Coordinate Systems and Initial Alignment
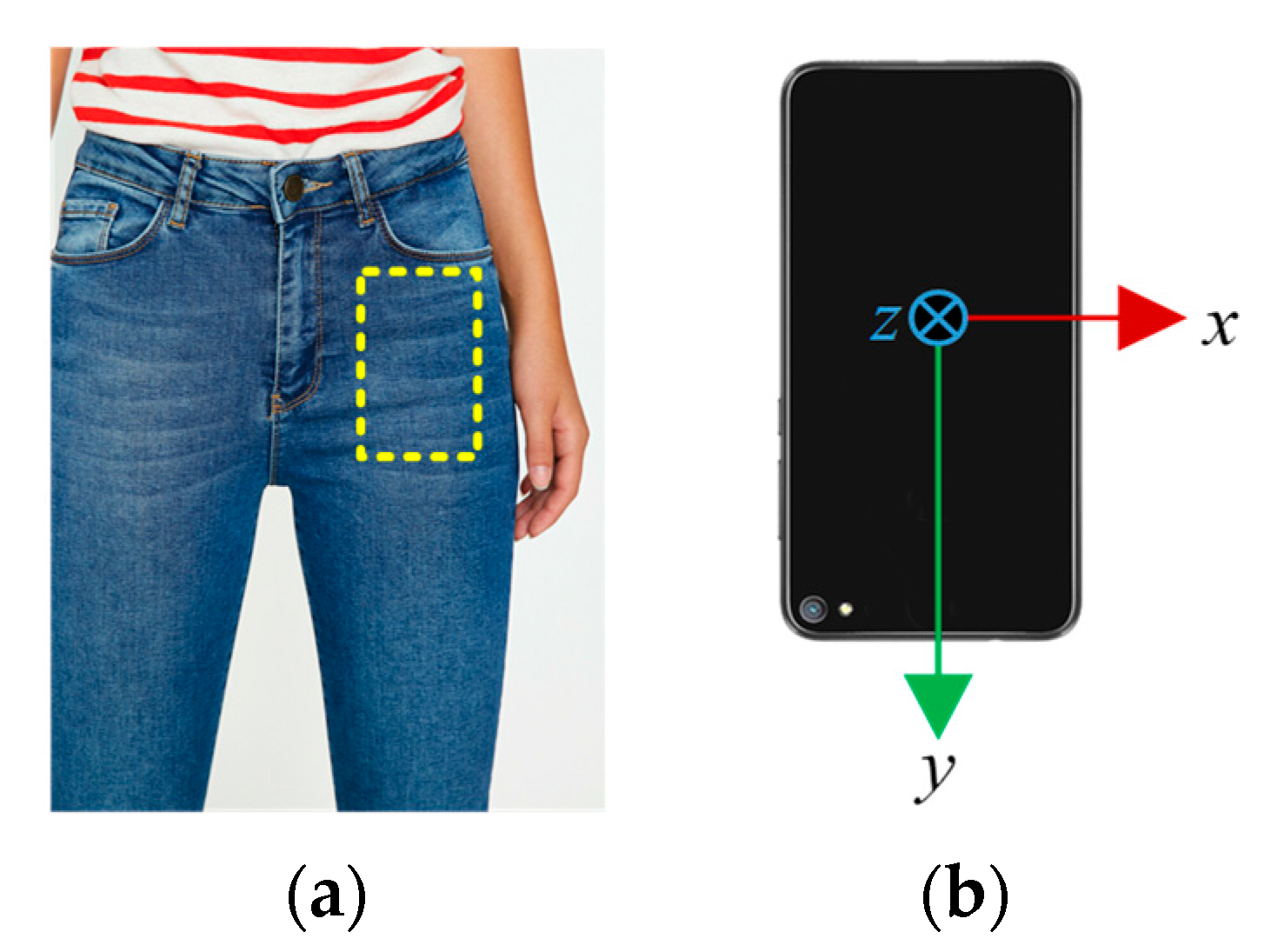
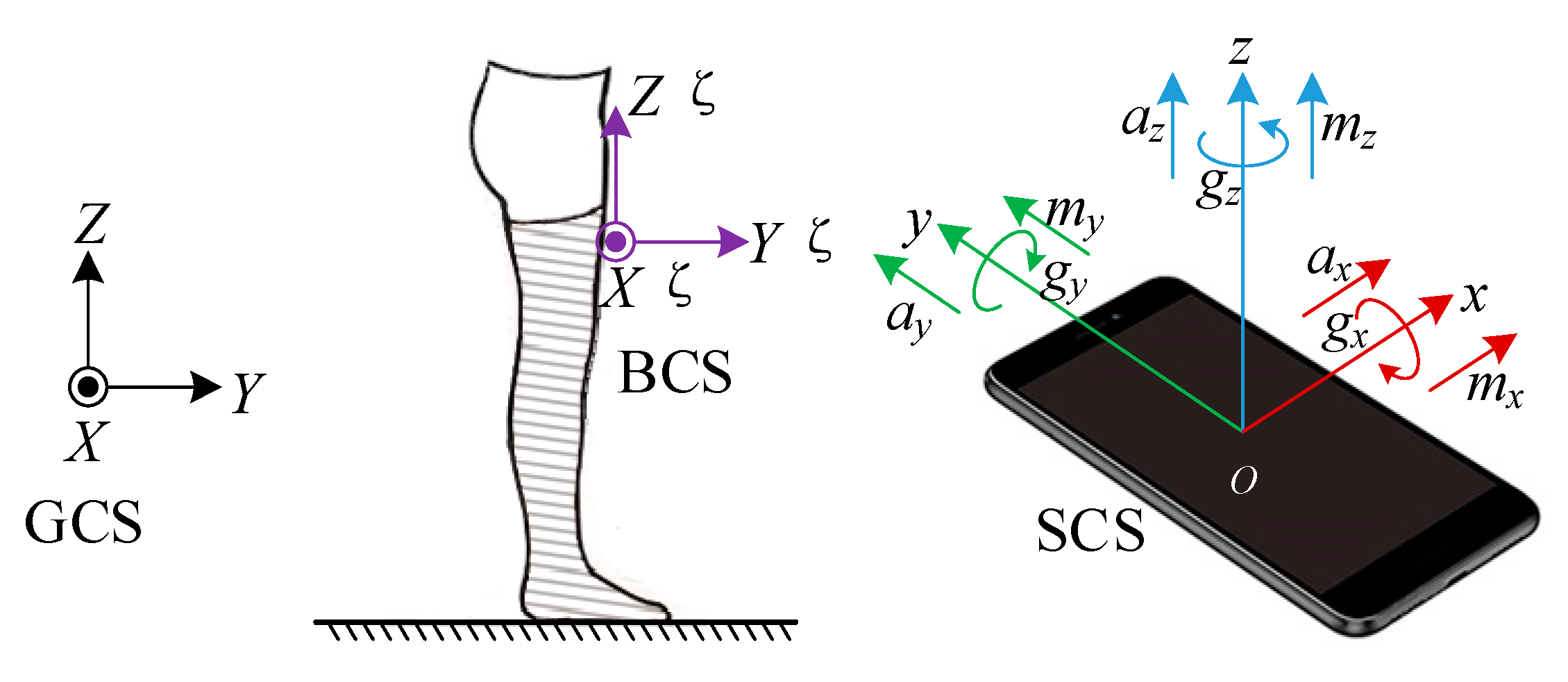
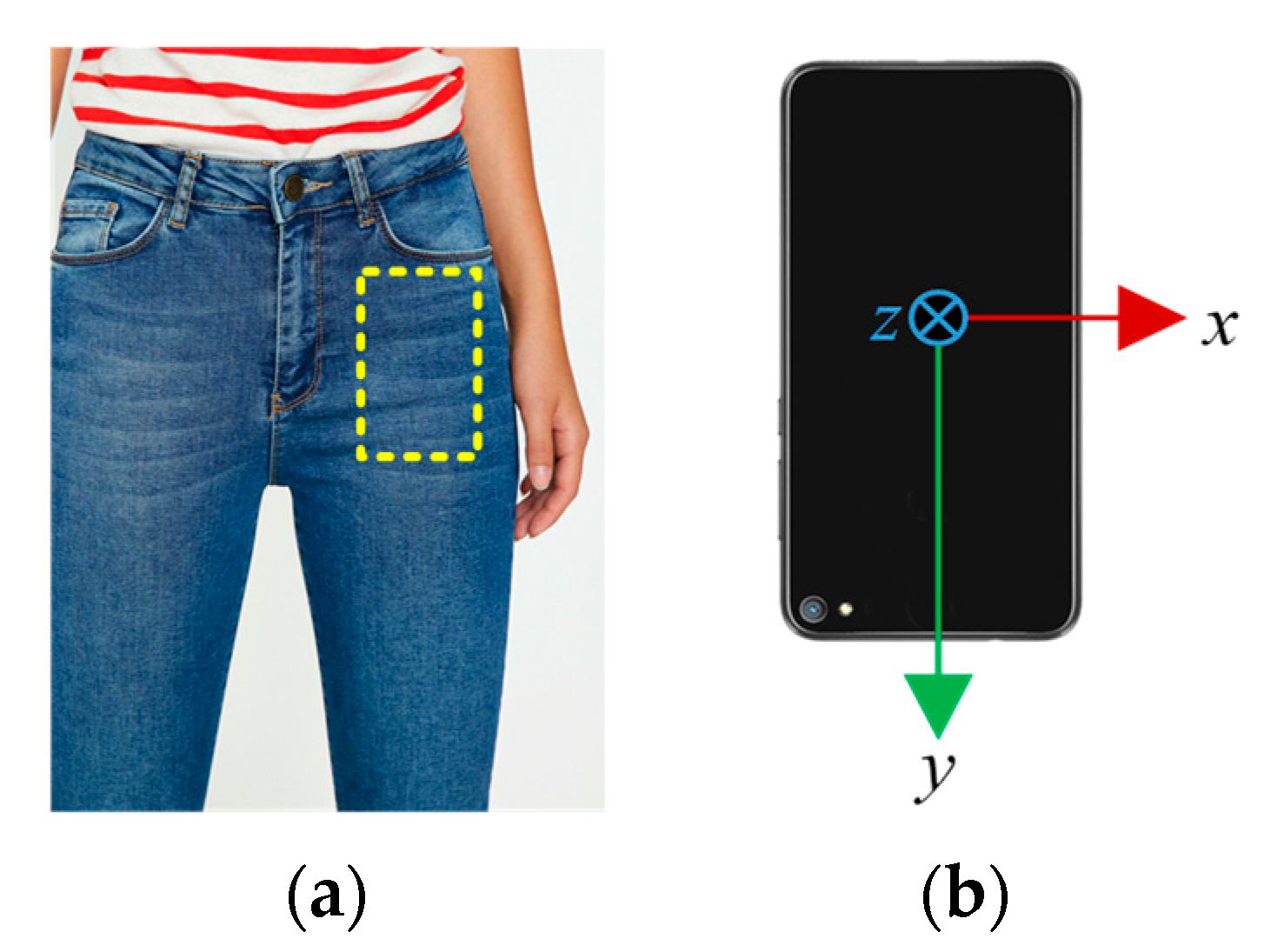
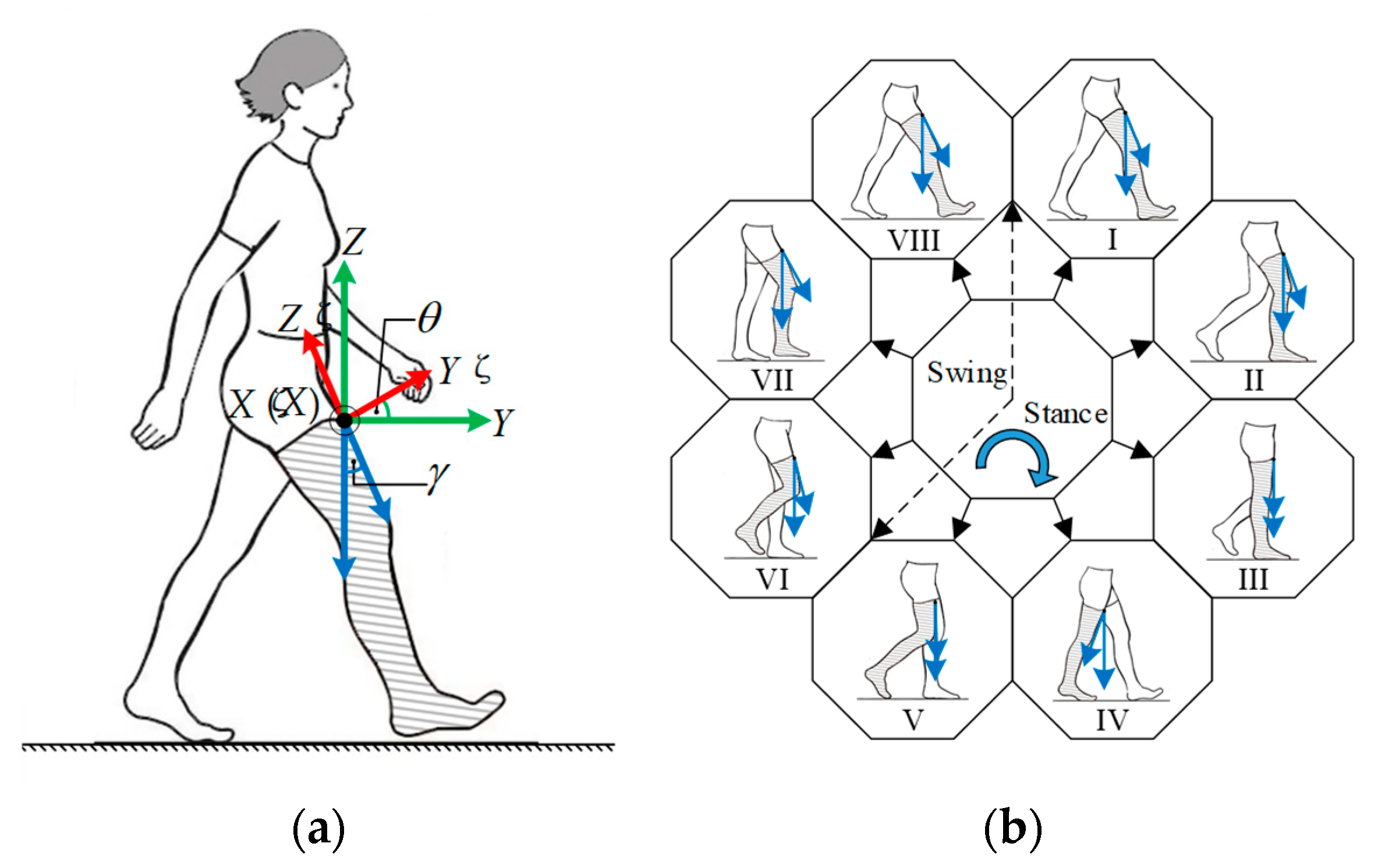
3.1. Coordinate Systems
3.2. Initial Alignment
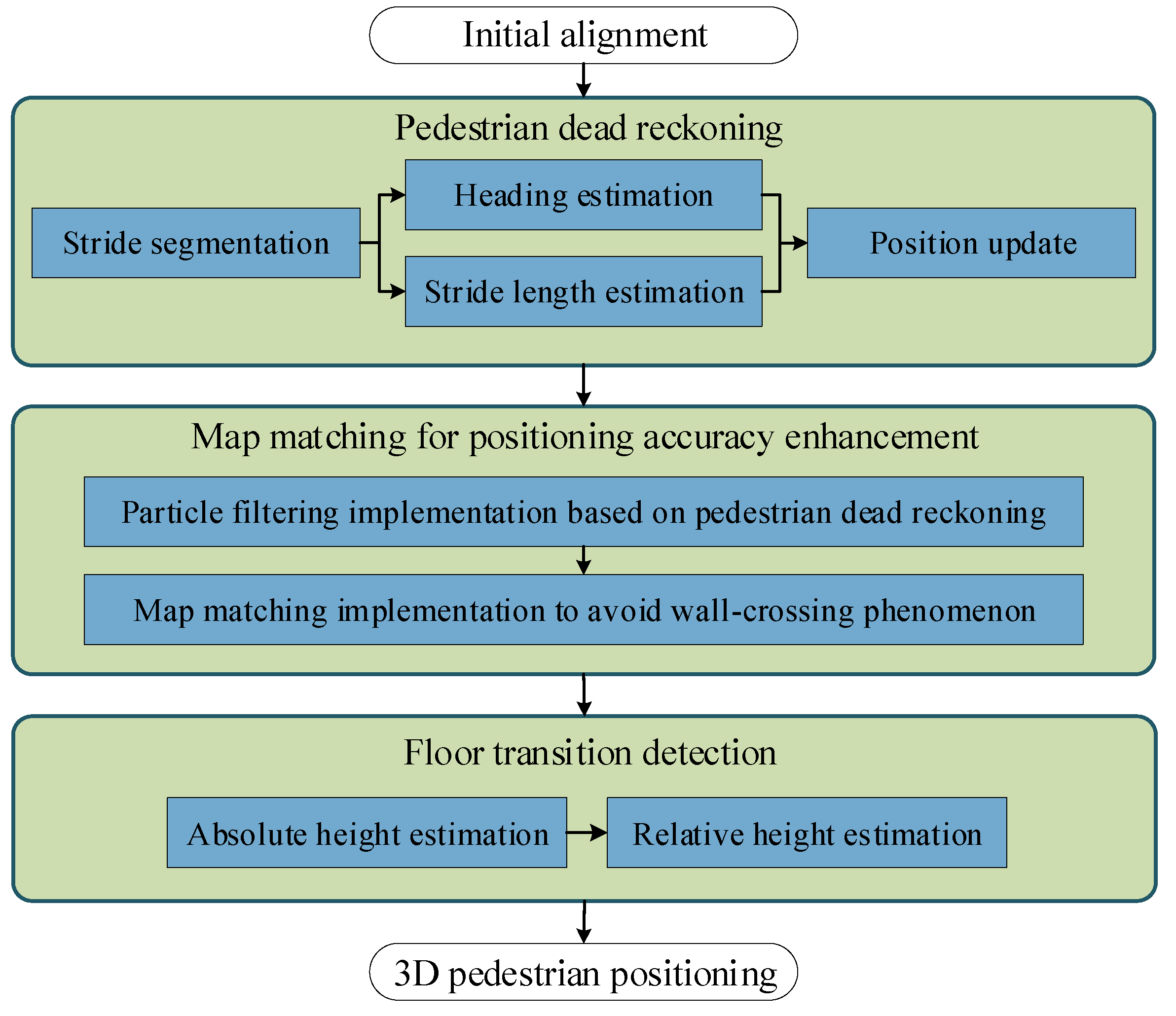
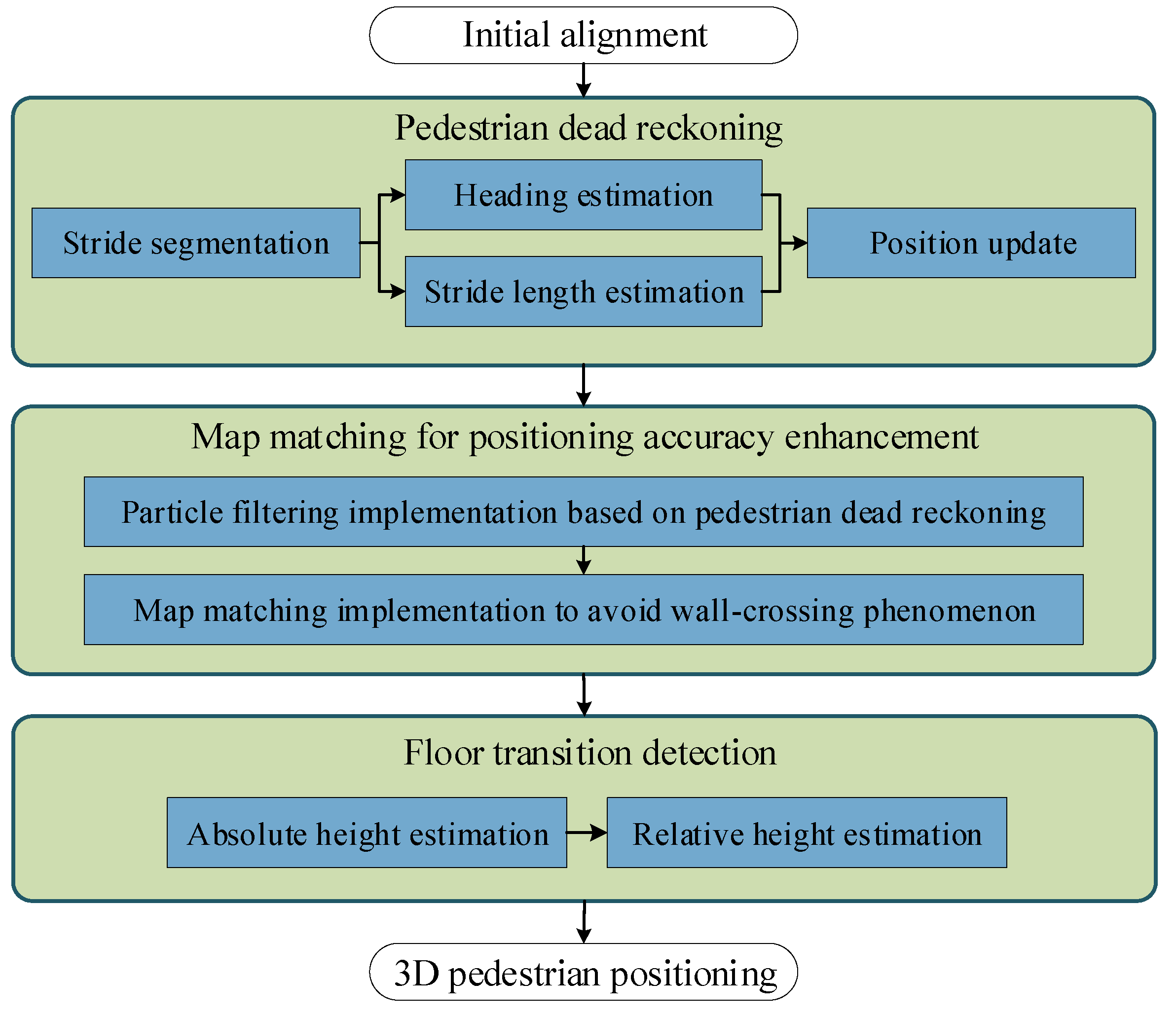
4. Pedestrian Positioning Implementation
4.1. Pedestrian Dead Reckoning (PDR)
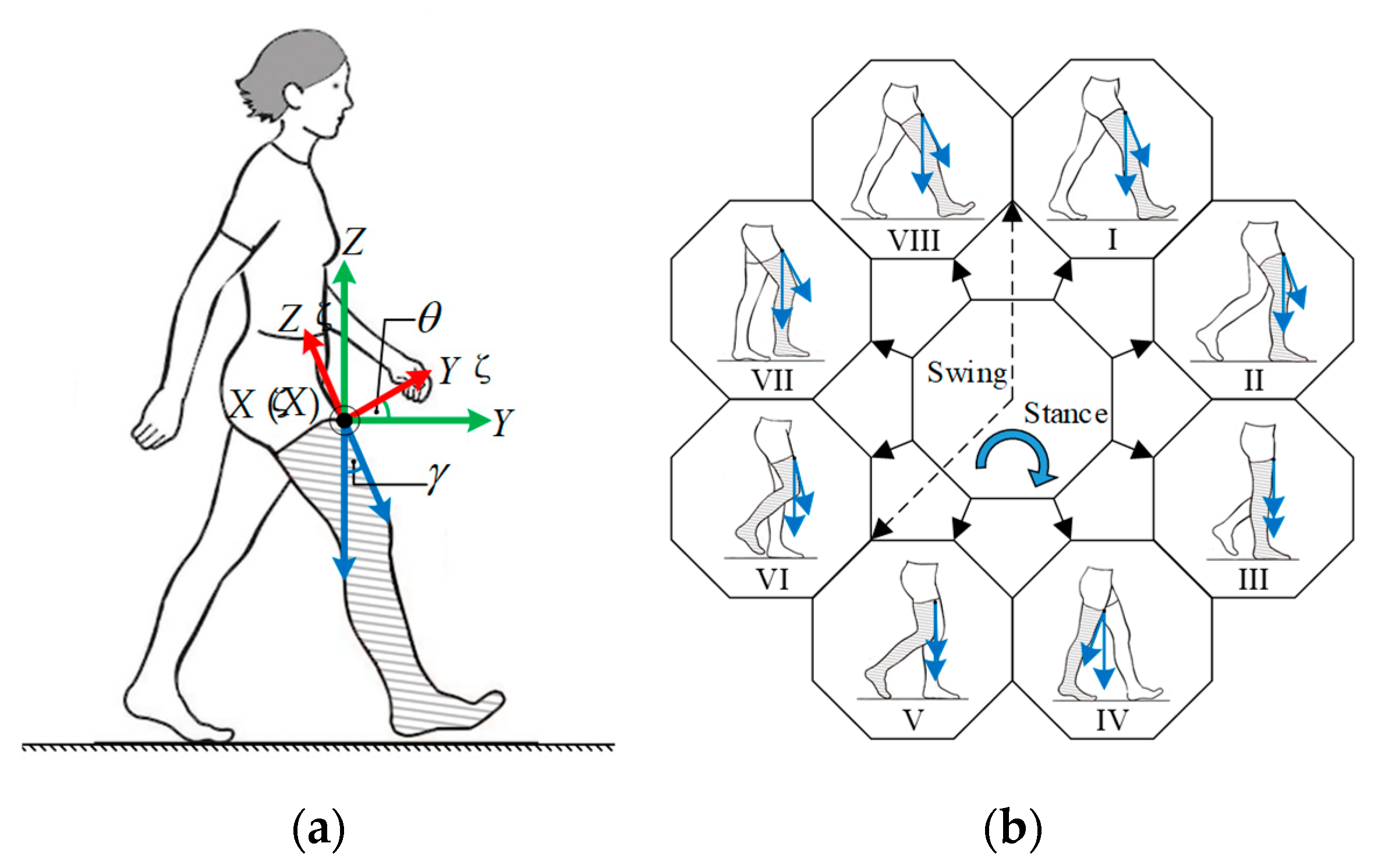
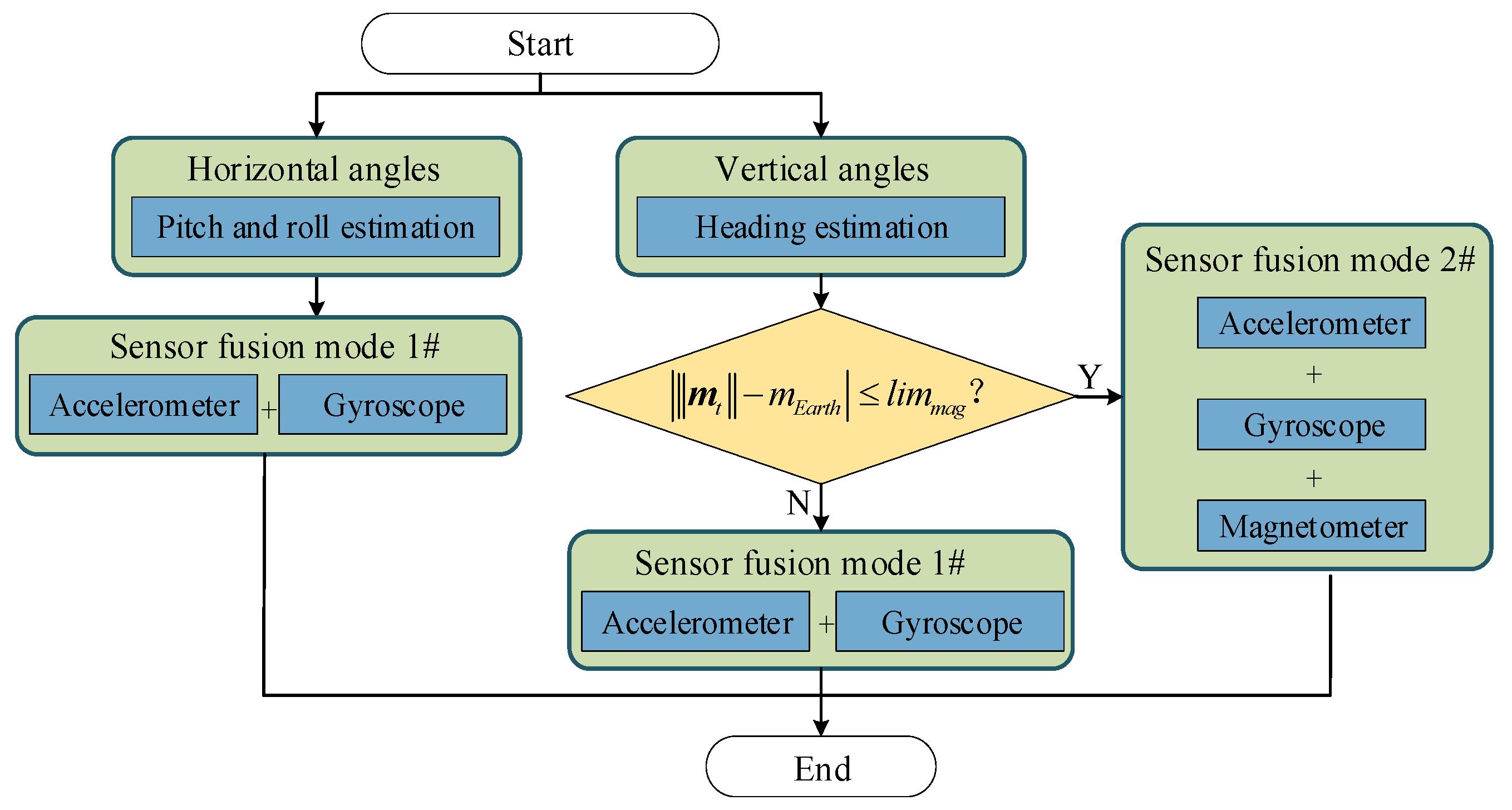
4.1.1. Attitude Estimation
4.1.2. Stride Segmentation
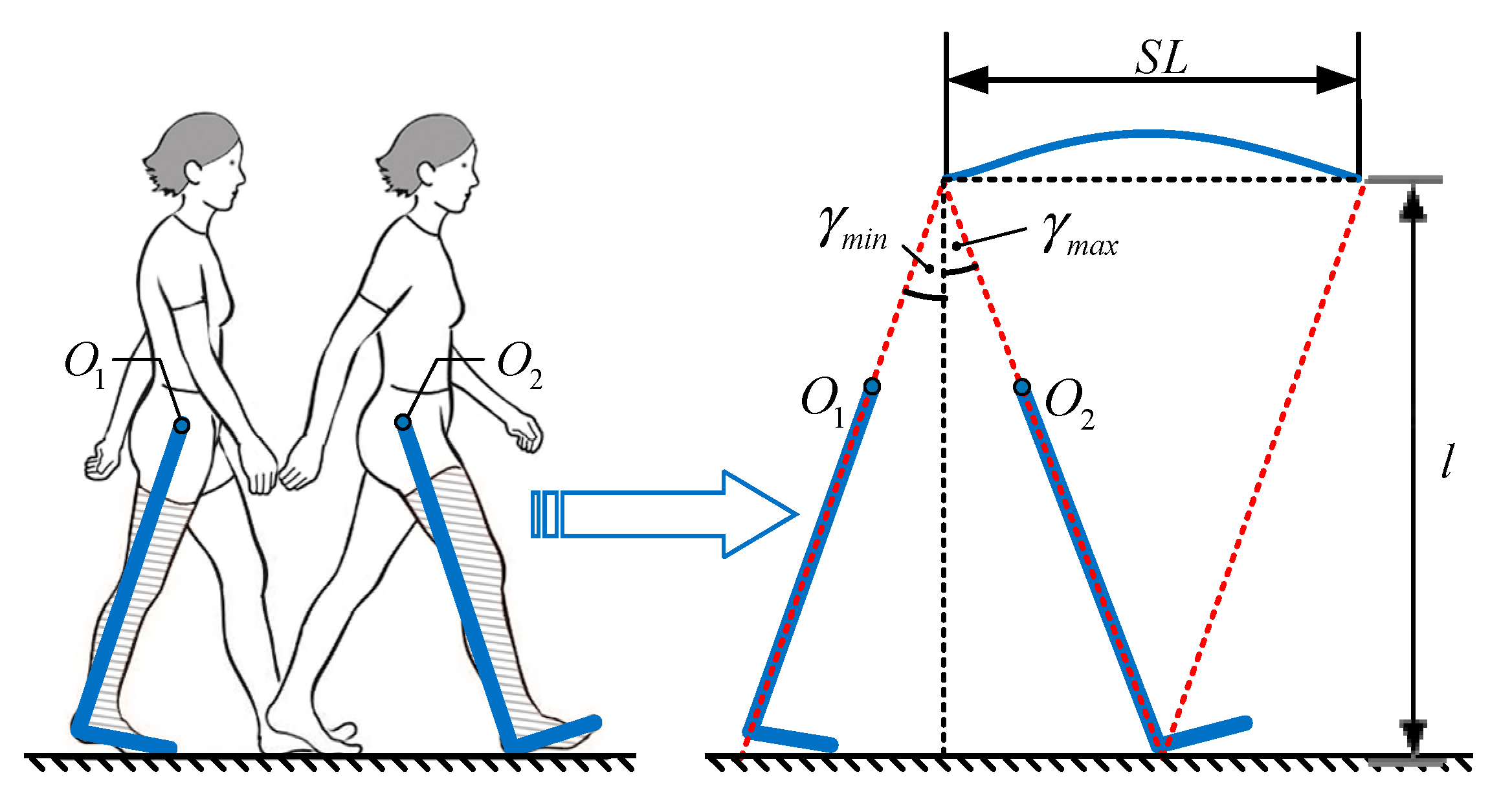
4.1.3. Stride Length Estimation
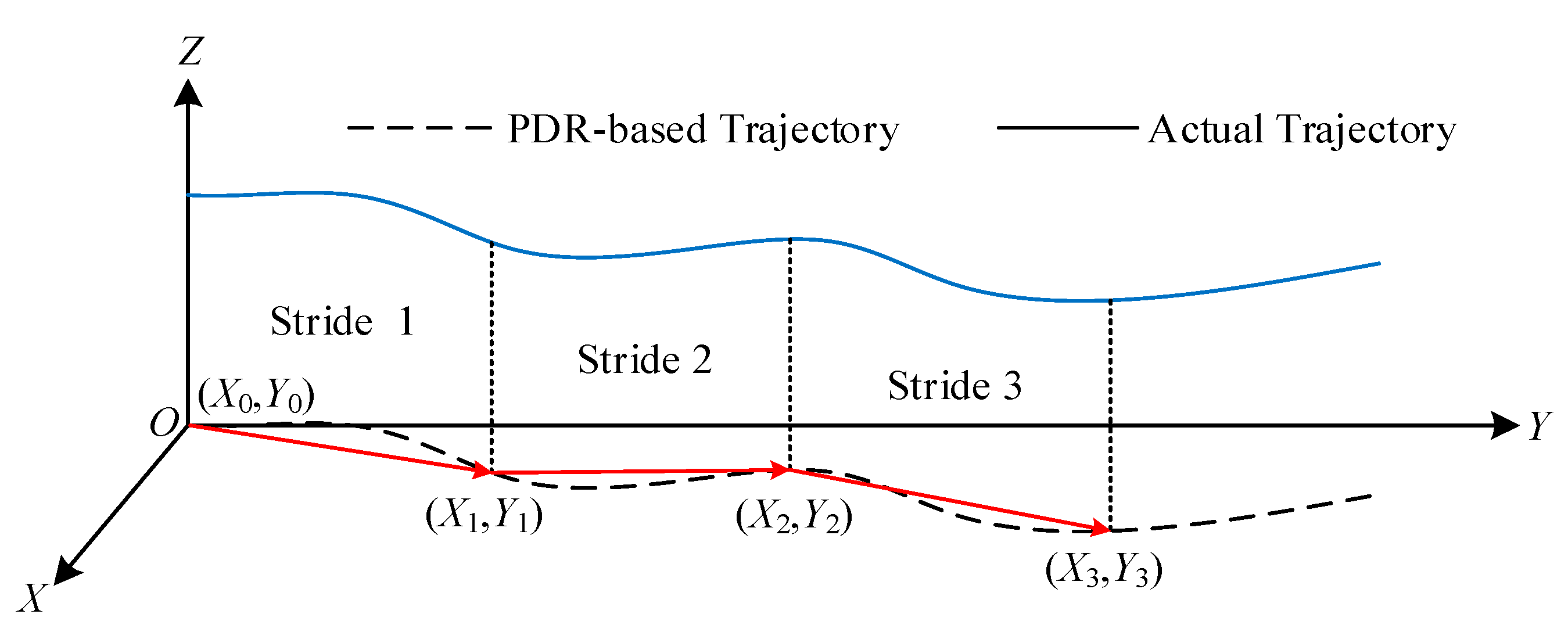
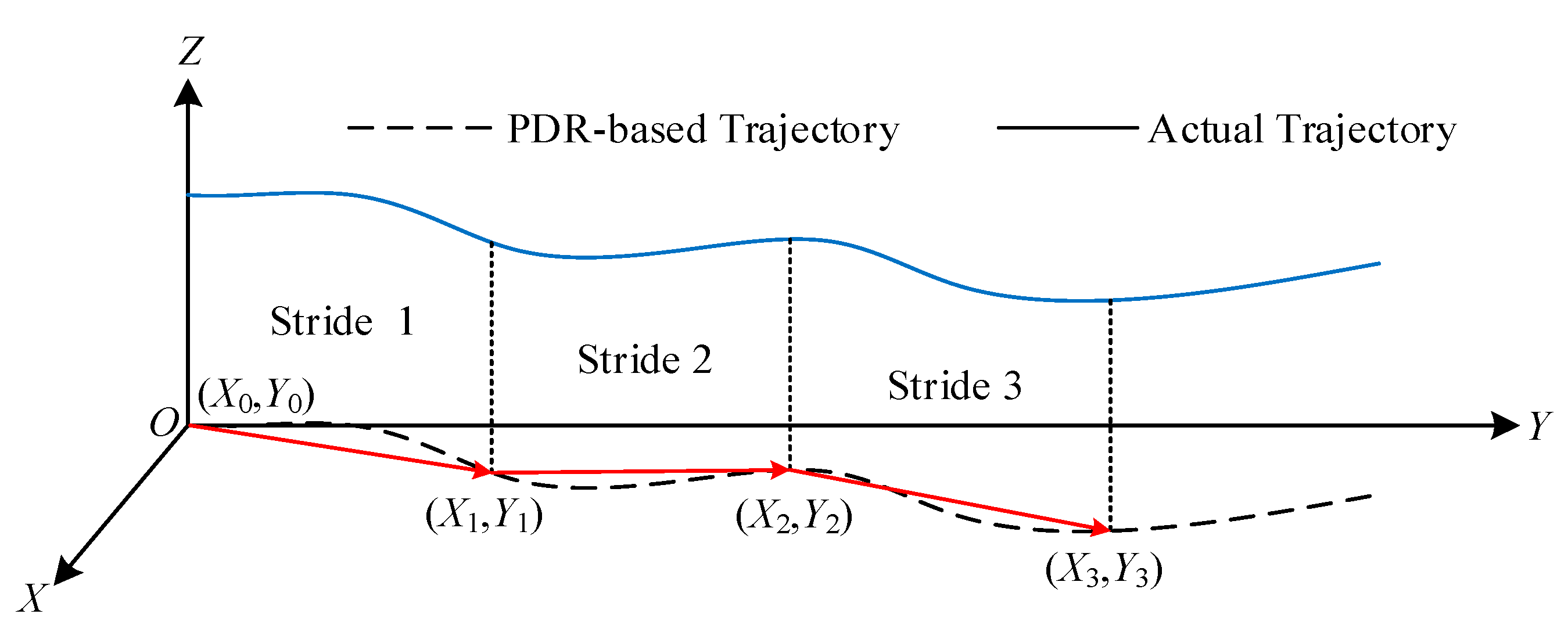
4.1.4. Position Update
4.2. Map Matching for Positioning Accuracy Enhancement
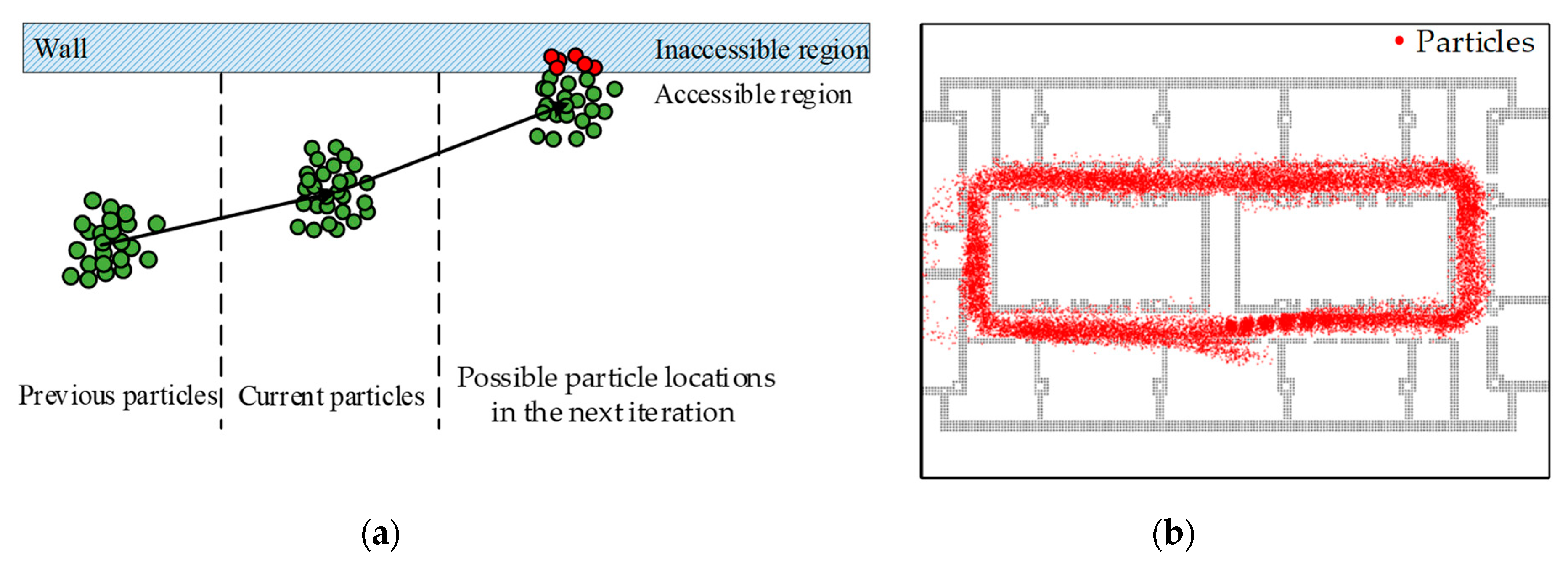
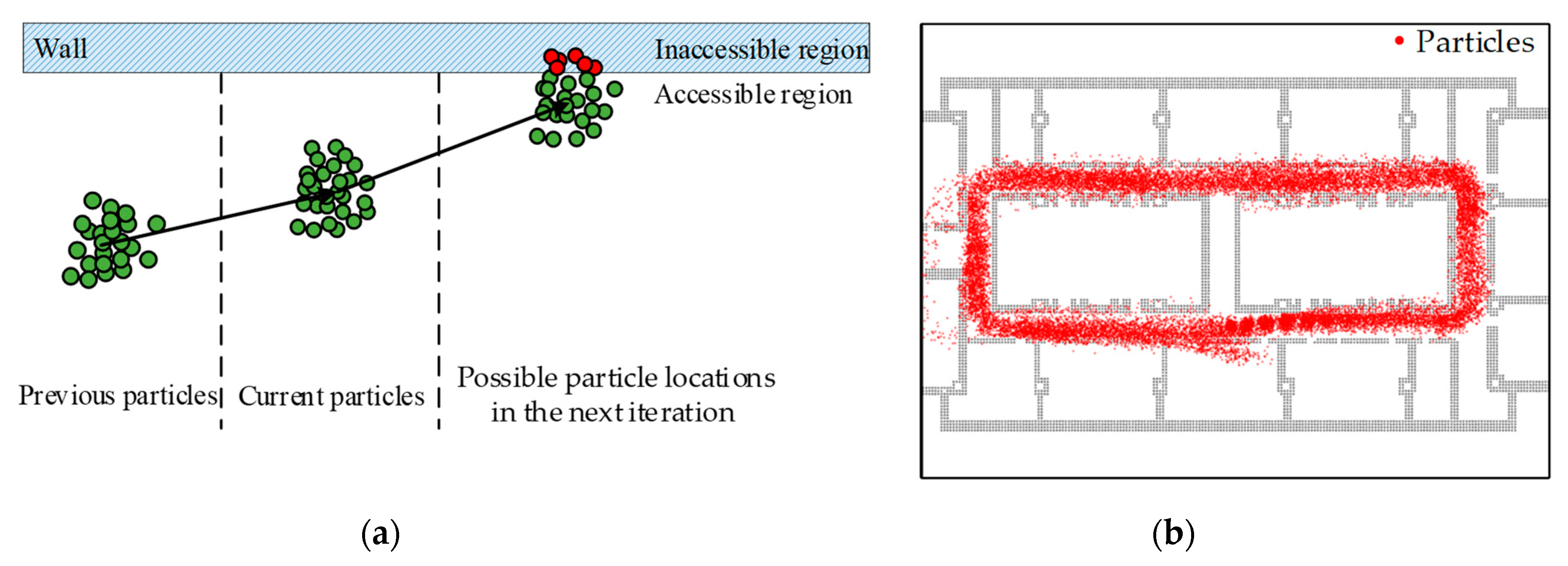
4.2.1. Particle-Filtering Implementation
4.2.2. Map-Matching Implementation
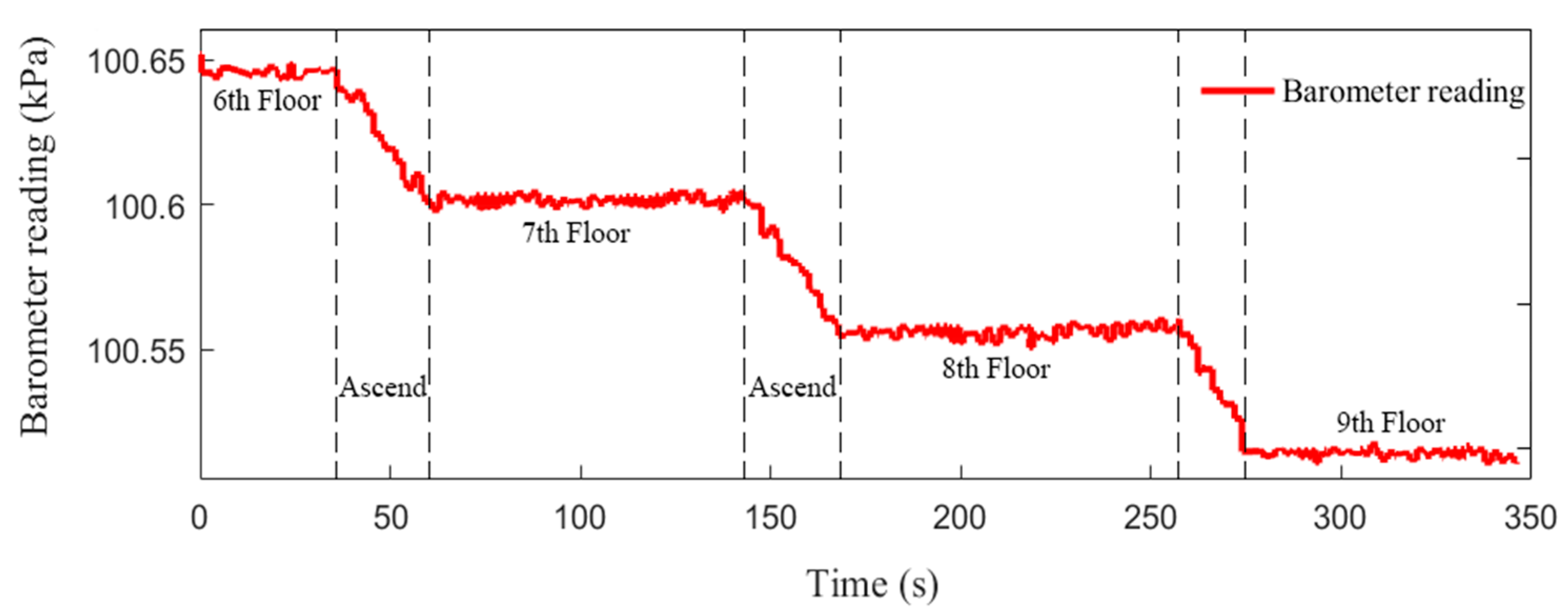
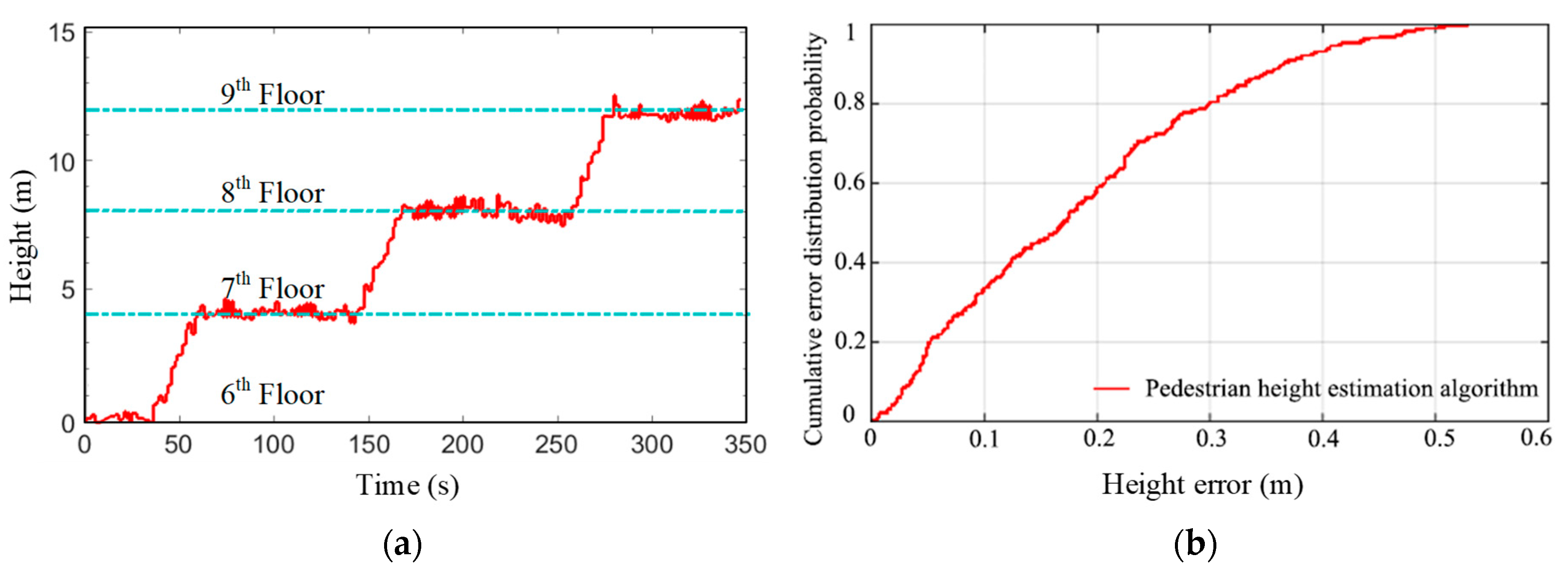
4.3. Floor Transition Detection
5. Experiment and Result
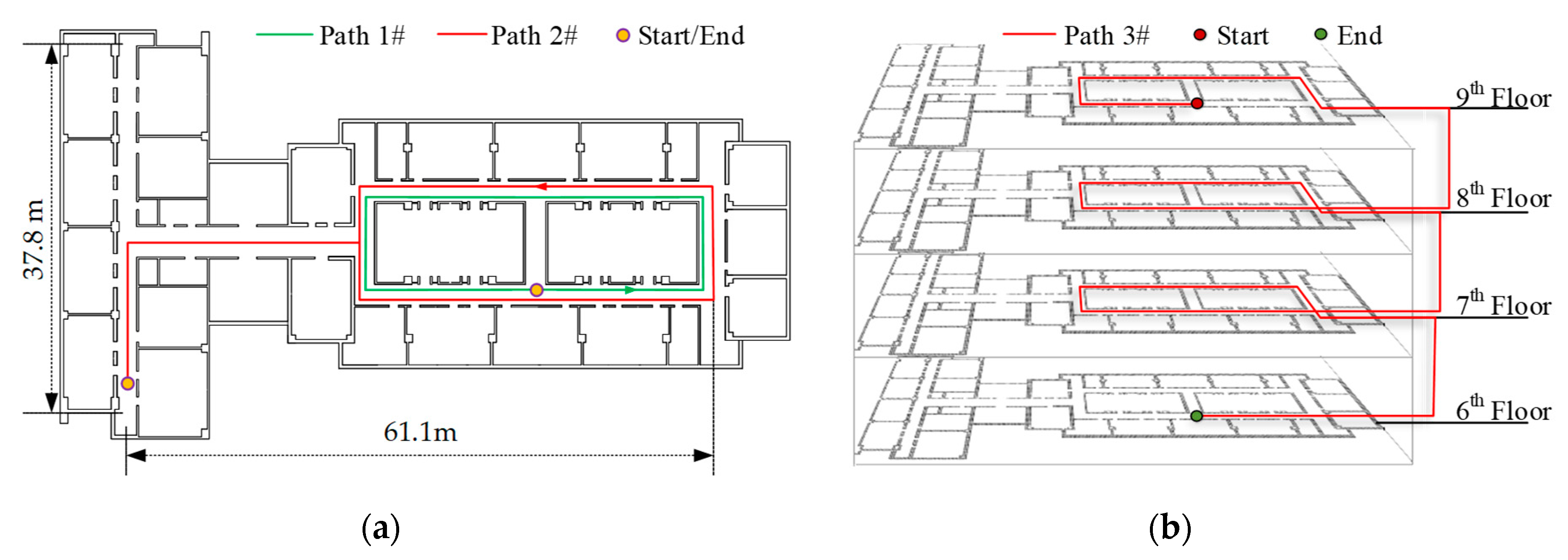
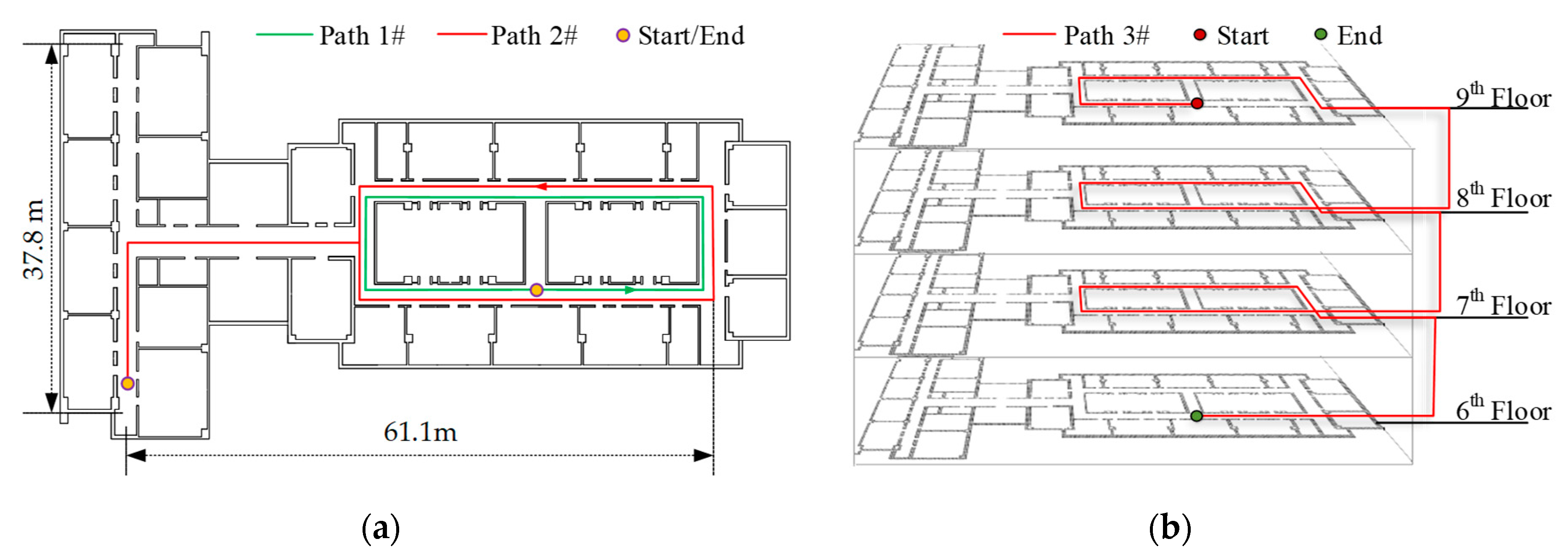
5.1. Experimental Setup
5.2. Experimental Results
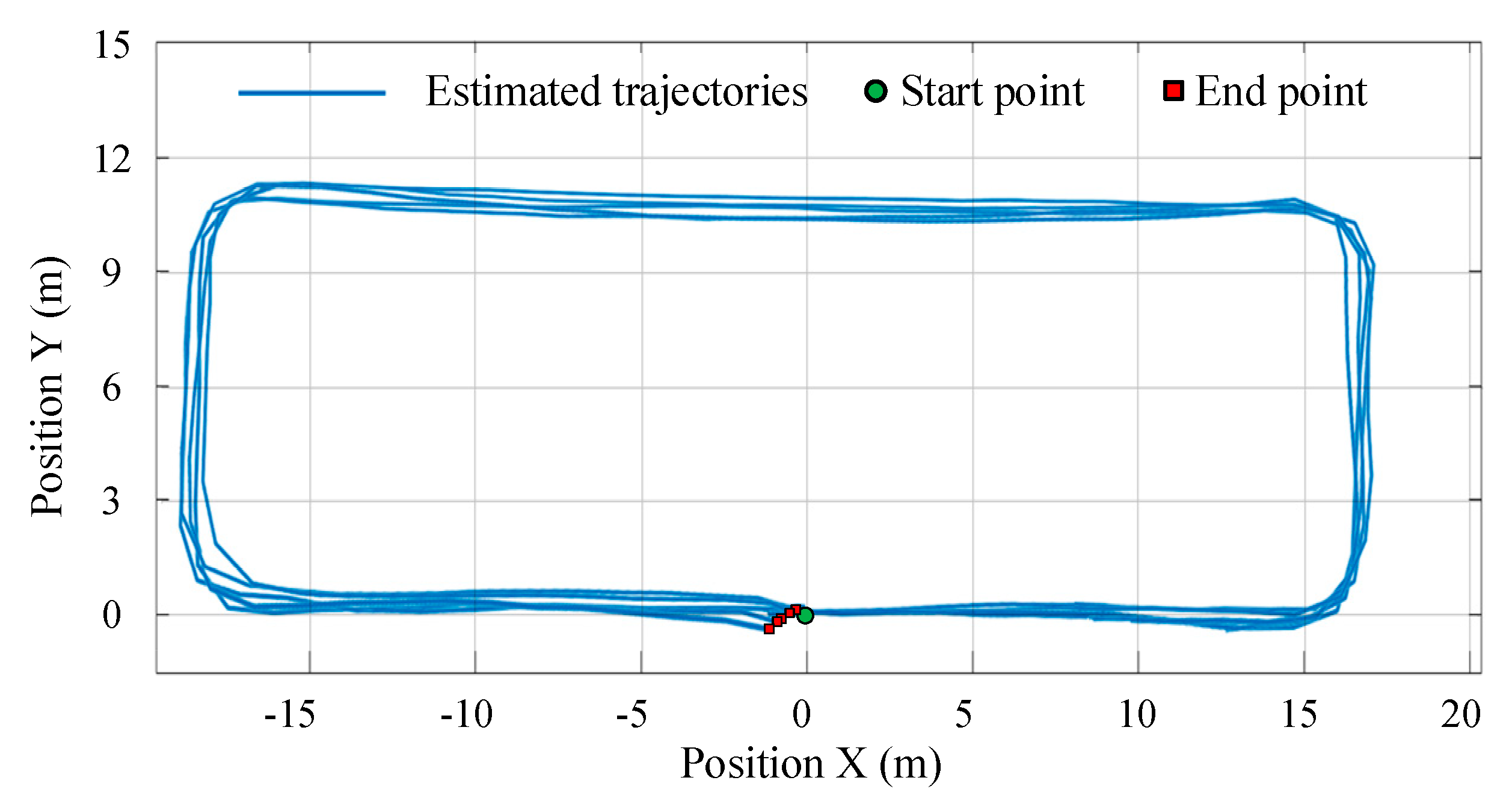
5.2.1. Pedestrian Dead Reckoning Test
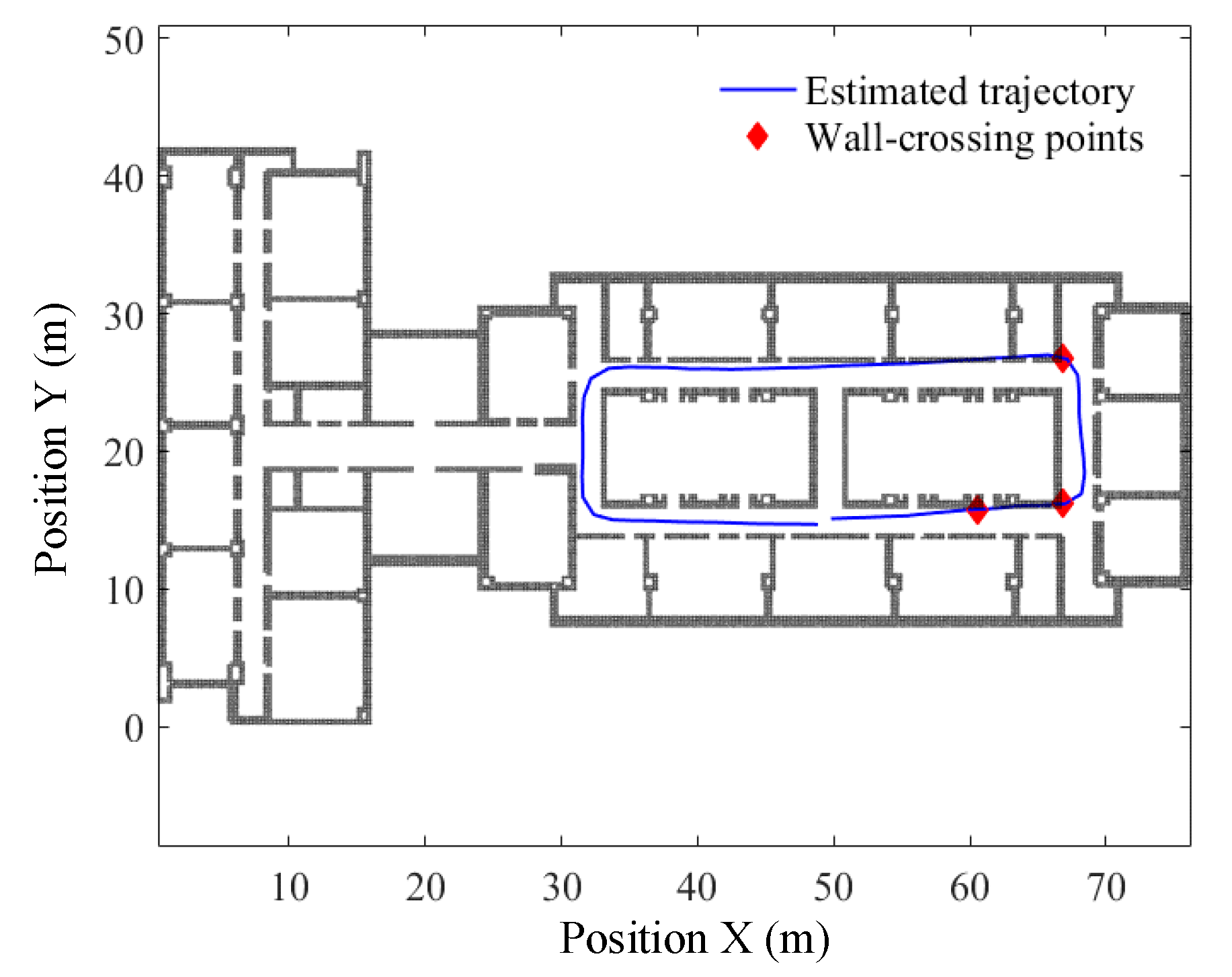
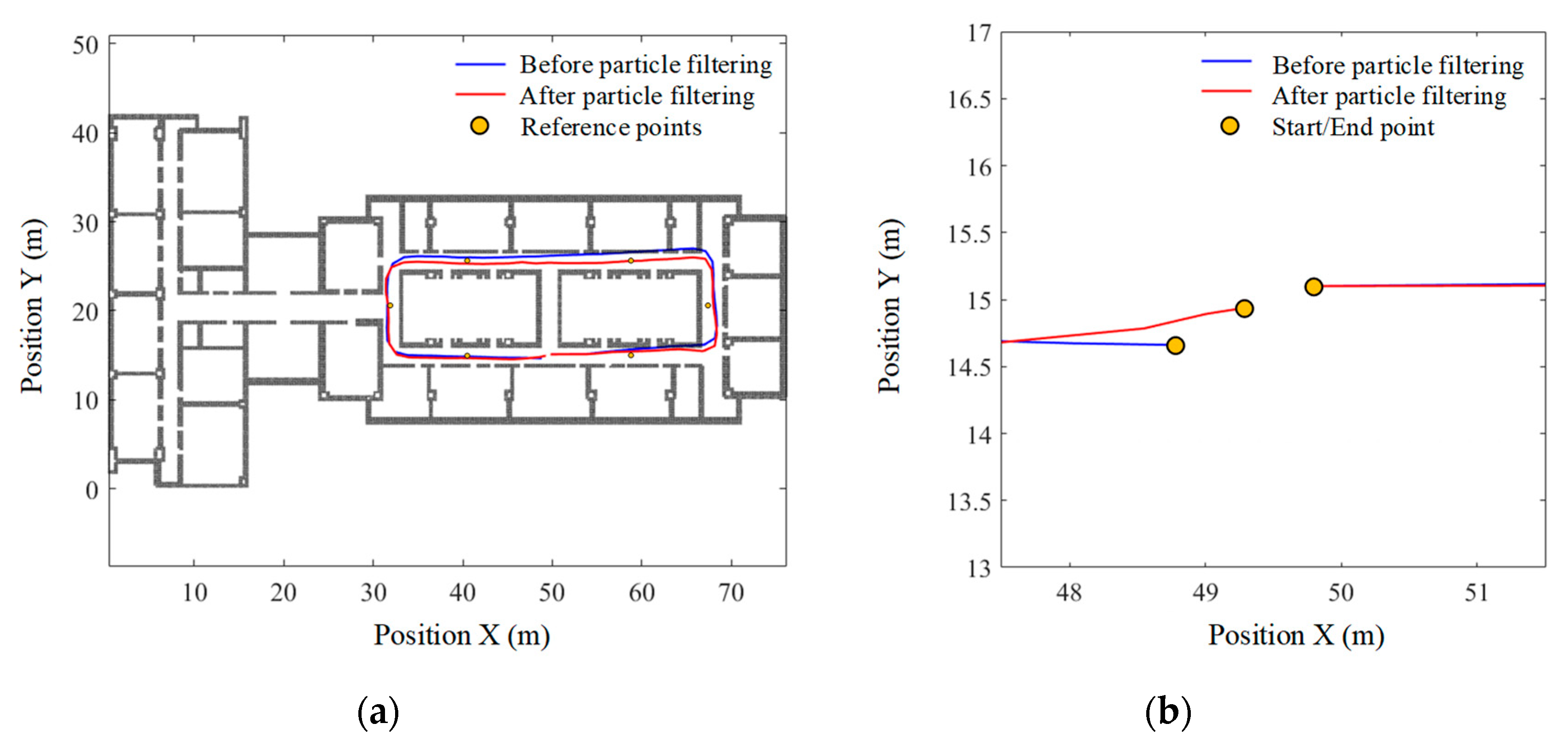
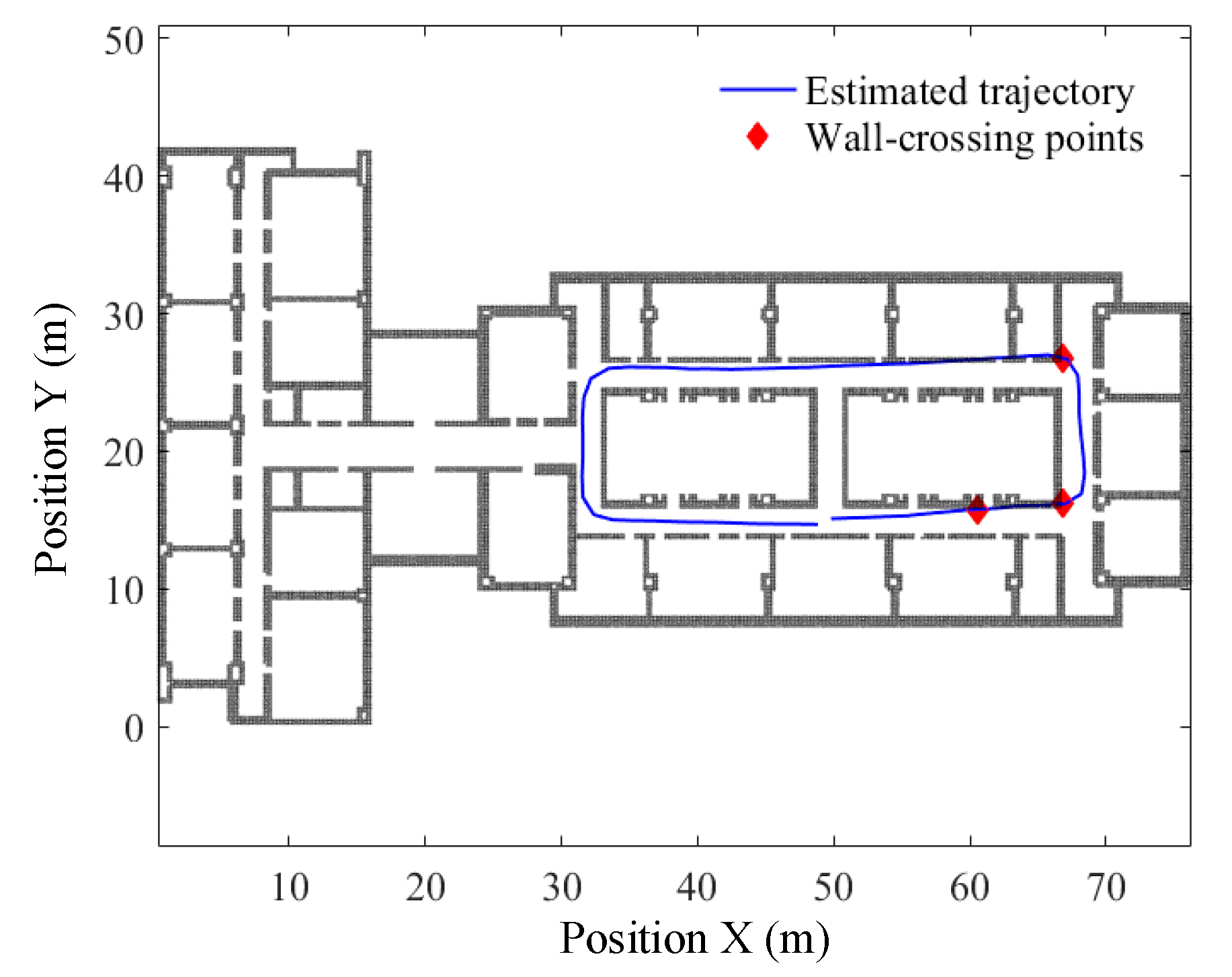
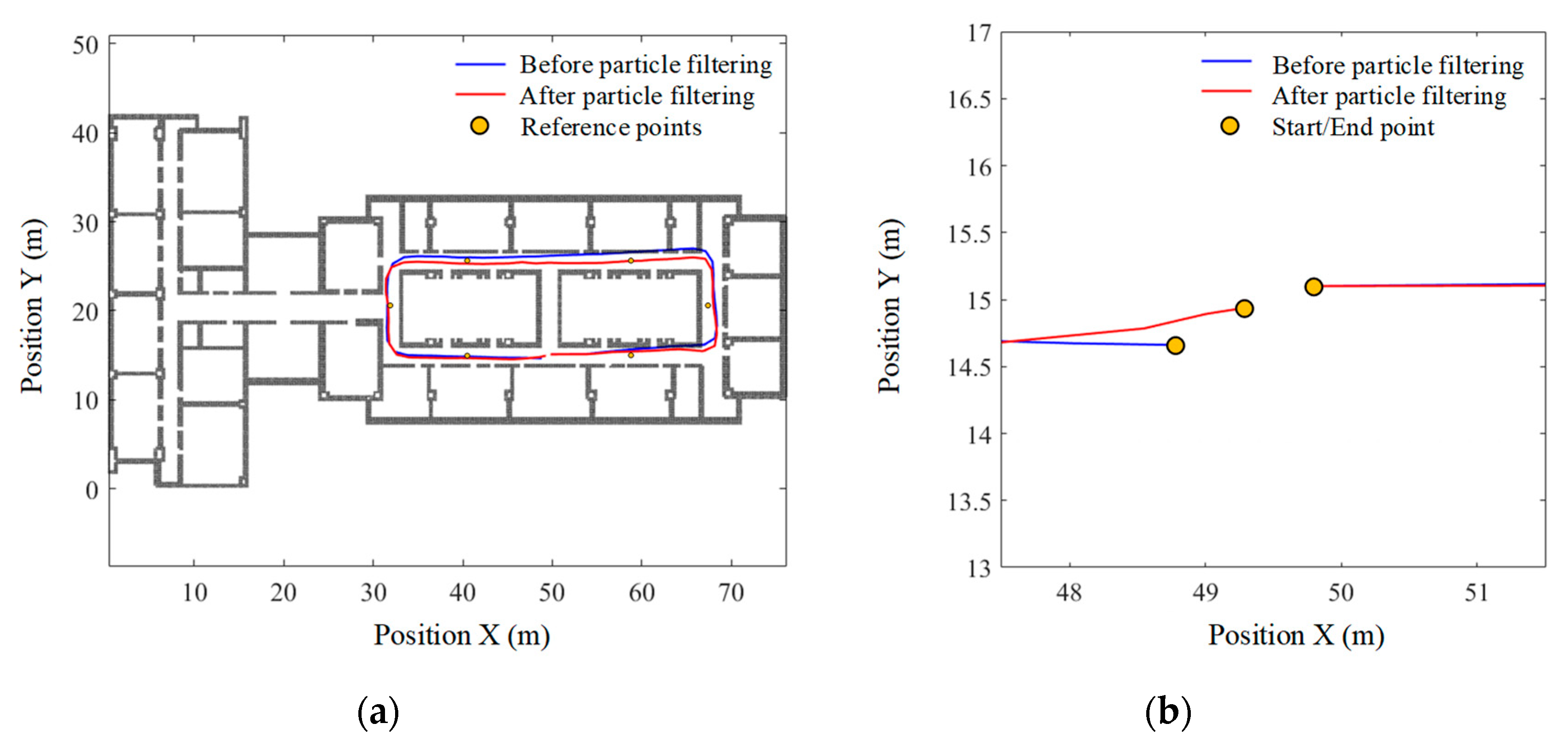
5.2.2. Map-Matching Algorithm Test
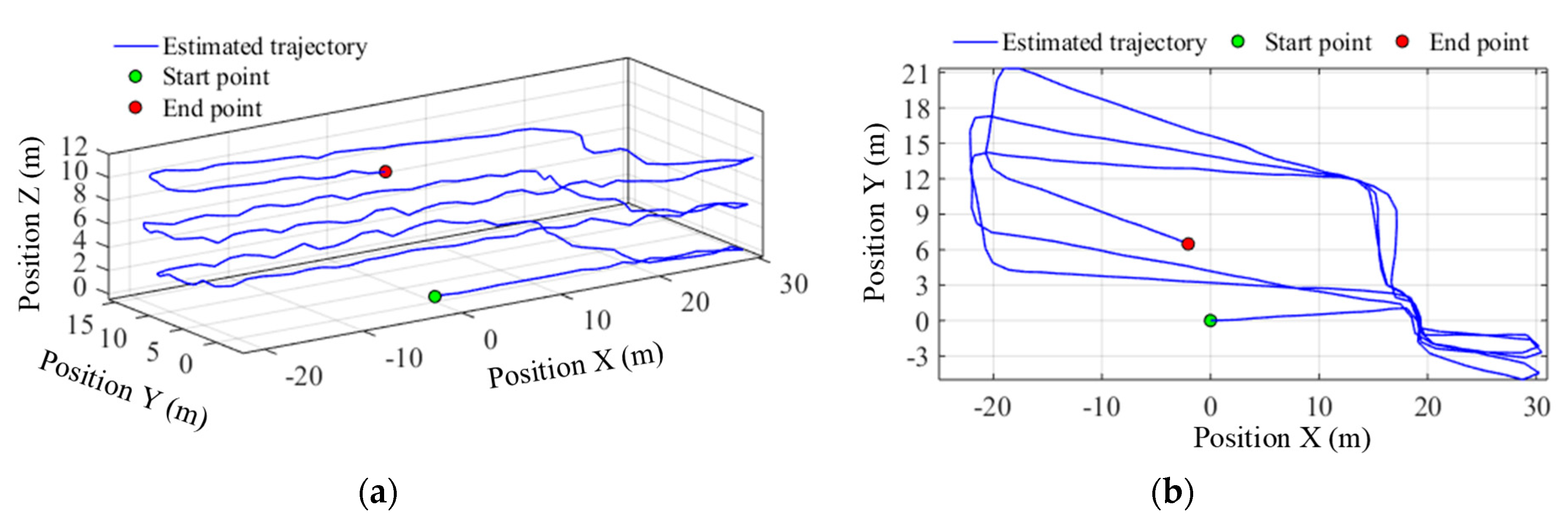
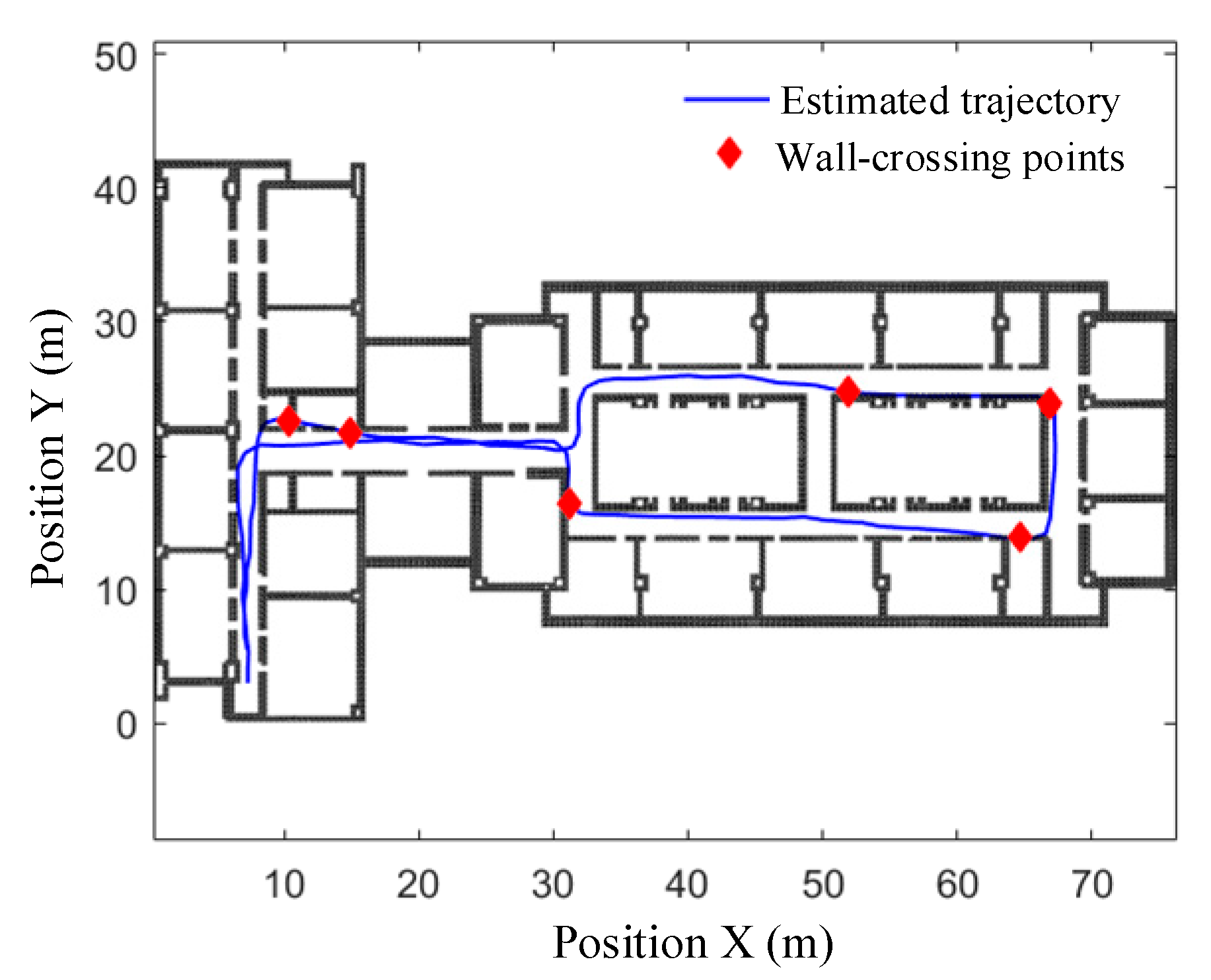
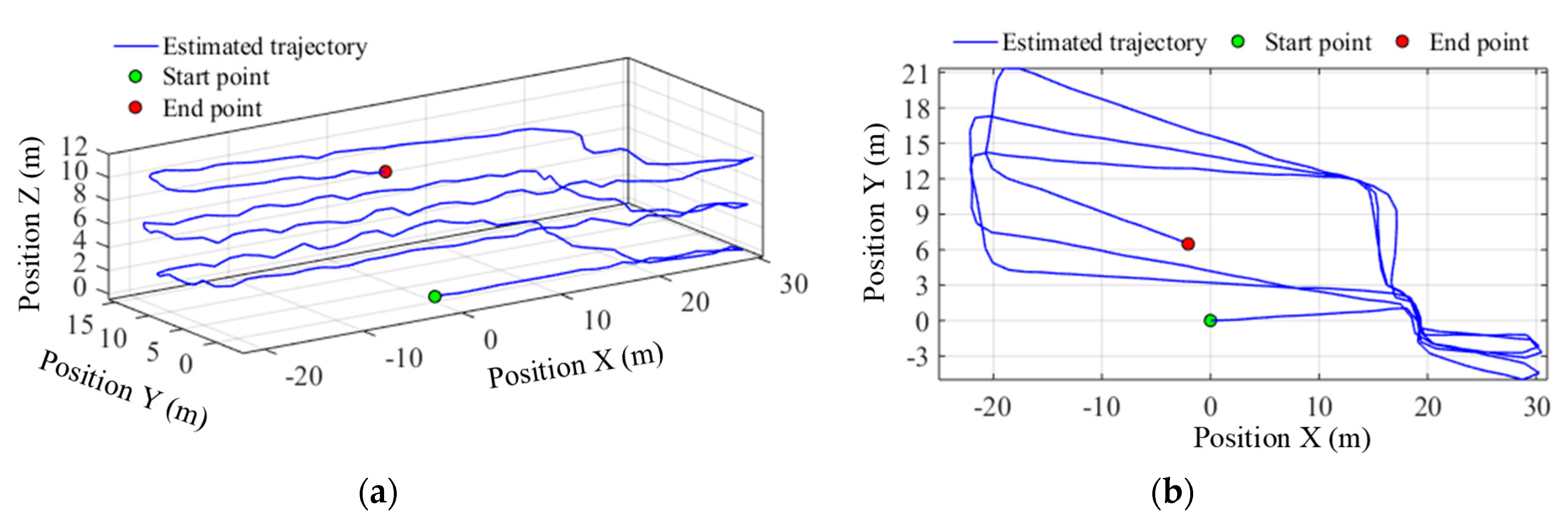
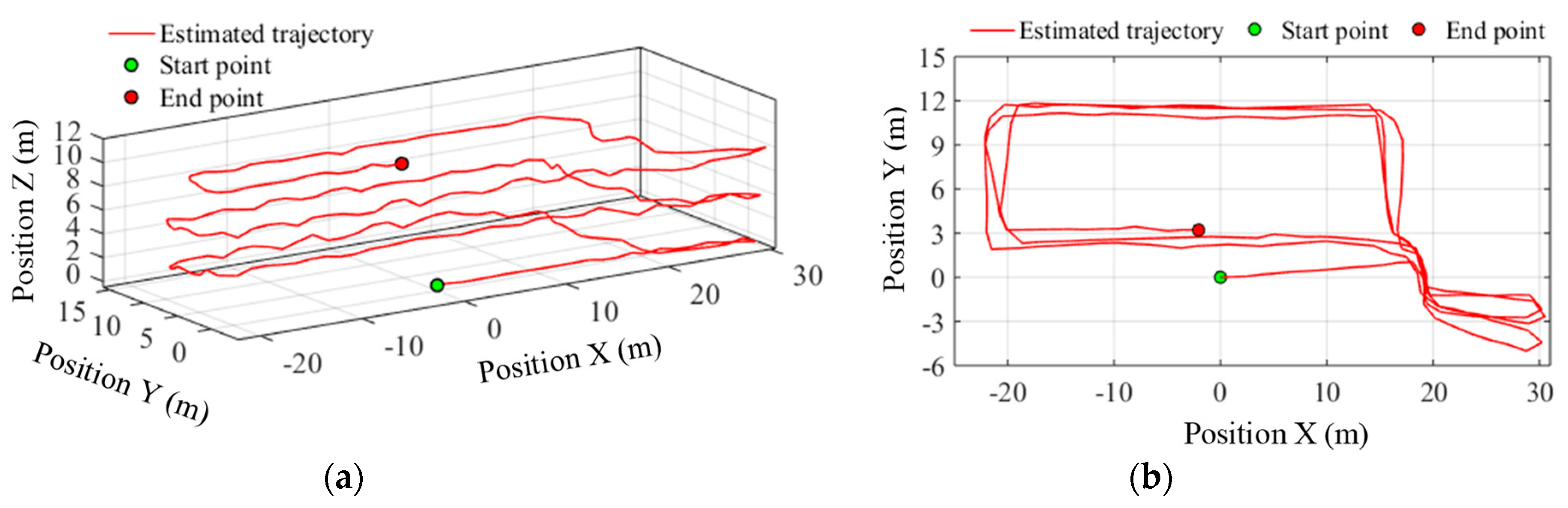
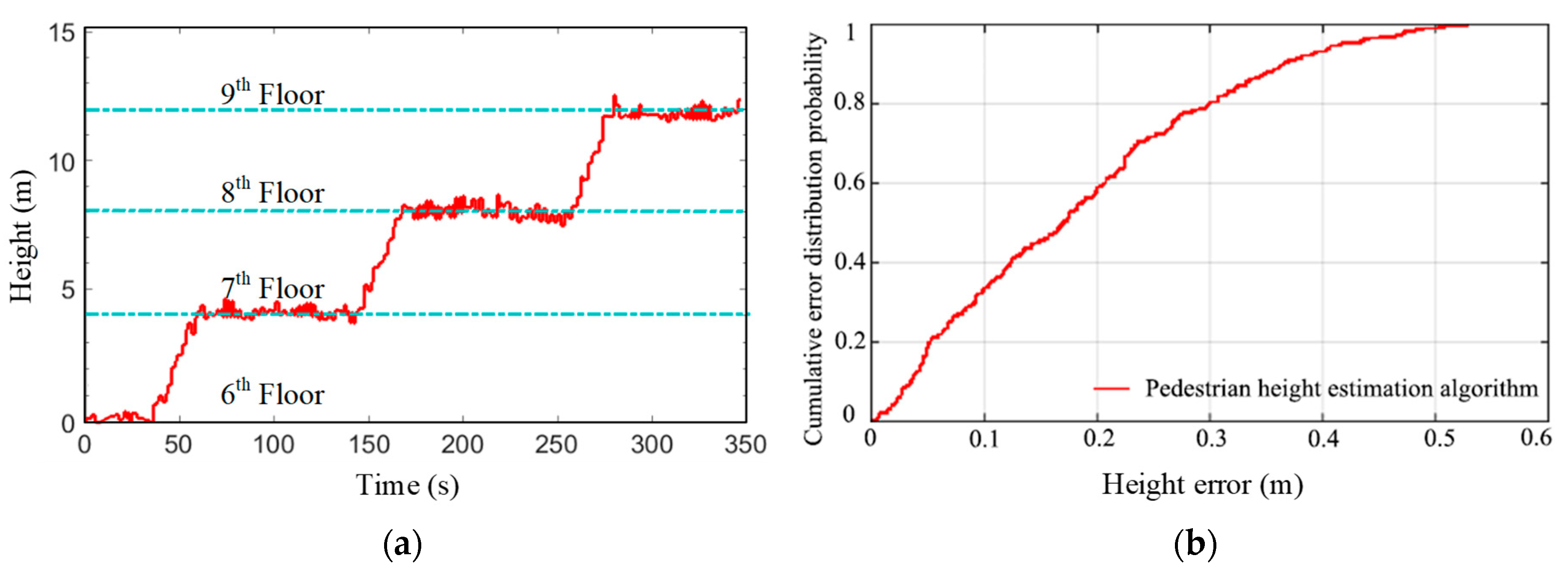
5.2.3. 3D Pedestrian Positioning Test
5.3. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Thulin, E.; Vilhelmson, B.; Schwanen, T. Absent friends? Smartphones, mediated presence, and the recoupling of online social contact in everyday life. Ann. Am. Assoc. Geogr. 2019, 1–18. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, Z.; Gao, Q.; Hassan, M.M.; Alelaiwi, A. Smooth estimation of human foot motion for zero-velocity-update-aided inertial pedestrian navigation system. Sens. Rev. 2015, 35, 389–400. [Google Scholar] [CrossRef]
- Kang, J.; Lee, J.; Eom, D.-S. Smartphone-based traveled distance estimation using individual walking patterns for indoor localization. Sensors 2018, 18, 3149. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Wang, Z.; Shang, H.; Hu, W.; Gao, Q. A time-controllable Allan variance method for MEMS IMU. Ind. Robot 2013, 40, 111–120. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, H.; Qiu, S.; Gao, Q. Stance-phase detection for ZUPT-aided foot-mounted pedestrian navigation system. IEEE-ASME Trans. Mechatron. 2015, 20, 3170–3181. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Zhang, R.; Hoeflinger, F.; Reindl, L. Inertial sensor based indoor localization and monitoring system for emergency responders. IEEE Sens. J. 2013, 13, 838–848. [Google Scholar] [CrossRef]
- Prieto, J.; Mazuelas, S.; Win, M.Z. Context-aided inertial navigation via belief condensation. IEEE Trans. Signal Process. 2016, 64, 3250–3261. [Google Scholar] [CrossRef]
- Lu, C.; Uchiyama, H.; Thomas, D.; Shimada, A.; Taniguchi, R.-I. Indoor positioning system based on chest-mounted IMU. Sensors 2019, 19, 420. [Google Scholar] [CrossRef]
- Abid, M.; Renaudin, V.; Aoustin, Y.; Le-Carpentier, E.; Robert, T. Walking gait step length asymmetry induced by handheld device. IEEE Trans. Instrum. Meas. 2017, 25, 2075–2083. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, L.; Qiu, S.; Wang, Z.; Yang, N.; Xu, J. Pedestrian dead reckoning using pocket-worn smartphone. IEEE Access 2019, 7, 91063–91073. [Google Scholar] [CrossRef]
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef] [PubMed]
- Mahony, R.; Hamel, T.; Pflimlin, J.M. Nonlinear complementary filters on the special orthogonal group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar]
- Qiu, S.; Wang, Z.; Zhao, H.; Hu, H. Using distributed wearable sensors to measure and evaluate human lower limb motions. IEEE Trans. Instrum. Meas. 2016, 65, 939–950. [Google Scholar] [CrossRef]
- Bao, H.; Wong, W.C. A novel map-based dead-reckoning algorithm for indoor localization. J. Sens. Actuator Netw. 2014, 3, 44–63. [Google Scholar] [CrossRef]
- Liu, F.; Wang, J.; Zhang, J.; Han, H. An indoor localization method for pedestrians base on combined UWB/PDR/Floor map. Sensors 2019, 19, 2578. [Google Scholar] [CrossRef]
- Huang, H.Y.; Hsieh, C.Y.; Liu, K.C.; Cheng, H.C.; Hsu, S.J.; Chan, C.T. Multi-sensor fusion approach for improving map-based indoor pedestrian localization. Sensors 2019, 19, 3786. [Google Scholar] [CrossRef]
- Montorsi, F.; Mazuelas, S.; Vitetta, G.M.; Win, M.Z. On the performance limits of map-aware localization. IEEE Trans. Inf. Theory 2013, 59, 5023–5038. [Google Scholar] [CrossRef]
- Kim, Y.; Chung, W.; Hong, D. Indoor parking localization based on dual weighted particle filter. Int. J. Precis. Eng. Manuf. 2018, 19, 293–298. [Google Scholar] [CrossRef]
- Pei, L.; Liu, D.; Zou, D.; Choy, R.L.F.; Chen, Y.; He, Z. Optimal heading estimation based multidimensional particle filter for pedestrian indoor positioning. IEEE Access 2018, 6, 49705–49720. [Google Scholar] [CrossRef]
- Beauregard, S.; Widyawan, T.; Klepal, M. Indoor PDR performance enhancement using minimal map information and particle filters information and particle filters. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, San Diego, CA, USA, 25–27 April 2008; pp. 141–147. [Google Scholar]
- Davidson, P.; Collin, J.; Takala, J. Application of particle filters for indoor positioning using floor plans. In Proceedings of the Ubiquitous Positioning Indoor Navigation and Location Based Service, Kirkkonummi, Finland, 14–15 October 2010; pp. 1–4. [Google Scholar]
- Wardihani, E.; Ramdhani, M.; Suharjono, A.; Setyawan, T.A.; Hidayat, S.S.; Helmy, S.W.; Triyono, E.; Saifullah, F. Real-time Forest Fire Monitoring System Using Unmanned Aerial Vehicle. J. Eng. Sci. Technol. 2018, 13, 1587–1594. [Google Scholar]
- Albéri, M.; Baldoncini, M.; Bottardi, C.; Chiarelli, E.; Fiorentini, G.; Kgc, R.; Realini, E.; Reguzzoni, M.; Rossi, L.; Sampietro, D. Accuracy of flight altitude measured with low-cost GNSS, radar and barometer sensors: Implications for airborne radiometric surveys. Sensors 2017, 17, 1889. [Google Scholar] [CrossRef] [PubMed]
- Shin, B.; Kim, C.; Kim, J.; Lee, S.; Kee, C.; Kim, H.S.; Lee, T. Motion recognition-based 3D pedestrian navigation system using smartphone. IEEE Sens. J. 2016, 16, 6977–6989. [Google Scholar] [CrossRef]
- Landa, V.; Ben-Moshe, B.; Hacohen, S.; Shvalb, N. GoIn-An Accurate 3D InDoor Navigation Framework for Mobile Devices. In Proceedings of the IEEE 2018 International Conference on Indoor Positioning and Indoor Navigation, Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Park, H.; Lee, K.M. Joint Estimation of Camera Pose, Depth, Deblurring, and Super-Resolution from a Blurred Image Sequence. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 4623–4631. [Google Scholar]
- Zhao, H.; Wang, Z.; Qiu, S.; Wang, J.; Xu, F.; Wang, Z.; Shen, Y. Adaptive gait detection based on foot-mounted inertial sensors and multi-sensor fusion. Inf. Fusion 2019, 52, 157–166. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, Z.; Qiu, S.; Shen, Y.; Zhang, L.; Tang, K.; Fortino, G. Heading drift reduction for foot-mounted inertial navigation system via multi-sensor fusion and dual-gait analysis. IEEE Sens. J. 2019, 19, 8514–8521. [Google Scholar] [CrossRef]
- Chen, S. Gait Feature Extraction from Inertial Body Sensor Networks for Medical Applications. Ph.D. Thesis, University of Virginia, Charlottesville, VA, USA, 2013. [Google Scholar]
- Ghorbel, M.B.; Khalfi, B.; Hamdaoui, B.; Guizani, M. Resources allocation for large-scale dynamic spectrum access system using particle filtering. In Proceedings of the IEEE Globecom Workshops, Austin, TX, USA, 8–12 December 2014; pp. 219–224. [Google Scholar]
- Keller, F.; Willemsen, T.; Sternberg, H. Calibration of smartphones for the use in indoor navigation. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–8. [Google Scholar]
- Willemsen, T.; Keller, F.; Sternberg, H. Concept for building a MEMS based indoor localization system. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Bexco, Korea, 27–30 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–10. [Google Scholar]
- Chen, G.; Meng, X.; Wang, Y.; Zhang, Y.; Tian, P.; Yang, H. Integrated WiFi/PDR/Smartphone using an unscented kalman filter algorithm for 3D indoor localization. Sensors 2015, 15, 24595–24614. [Google Scholar] [CrossRef] [PubMed]
- Pasku, V.; De Angelis, A.; Moschitta, A.; Carbone, P.; Nilsson, J.O.; Dwivedi, S.; Handel, P. A magnetic ranging-aided dead-reckoning positioning system for pedestrian applications. IEEE Trans. Instrum. Meas. 2017, 66, 953–963. [Google Scholar] [CrossRef]
- Zhang, M.Y.; Wen, Y.Y.; Chen, J.; Yang, X.T.; Gao, R.; Zhao, H. Pedestrian dead-reckoning indoor localization based on OS-ELM. IEEE Access 2018, 6, 6116–6129. [Google Scholar] [CrossRef]
- Tomazic, S.; Dovzan, D.; Skrjanc, I. Confidence-interval-fuzzy-model-based indoor localization. IEEE Trans. Ind. Electron. 2019, 66, 2015–2024. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial | Average Stride Duration | Stride Cadence | Average Stride Length | Stride Count | Estimated Distance | Estimated Final Position | Final Position Error | ||
|---|---|---|---|---|---|---|---|---|---|
| Detected | Truth | Absolute | Relative | ||||||
| 1st | 1.06 s | 55 stride/min | 1.28 m | 71 | 71 | 90.32 m | (−0.71, −0.23) | 0.75 m | 0.83% |
| 2nd | 1.00 s | 59 stride/min | 1.32 m | 70 | 70 | 90.56 m | (−0.46, −0.13) | 0.48 m | 0.53% |
| 3rd | 1.13 s | 55 stride/min | 1.32 m | 69 | 69 | 90.74 m | (−0.98, −0.44) | 1.07 m | 1.19% |
| 4th | 1.01 s | 58 stride/min | 1.32 m | 69 | 69 | 90.72 m | (−0.39, 0.32) | 0.50 m | 0.56% |
| 5th | 1.03 s | 58 stride/min | 1.31 m | 70 | 70 | 90.54 m | (−0.67, 0.14) | 0.68 m | 0.76% |
| Mean | 1.05 s | 57 stride/min | 1.31 m | 70 | 70 | 90.58 m | -- | 0.67 m | 0.77% |
| Reference Point | Point Location | Estimated Distance | Distance Error (Before) | Distance Error (After) | ||
|---|---|---|---|---|---|---|
| Absolute | Relative | Absolute | Relative | |||
| 1 | (40.5, 25.4) | 90.74 m | 0.59 m | 0.65% | 0.11 m | 0.12% |
| 2 | (40.5, 14.7) | 90.74 m | 0.15 m | 0.16% | 0.02 m | 0.02% |
| 3 | (59.3, 25.4) | 90.74 m | 1.25 m | 1.38% | 0.19 m | 0.20% |
| 4 | (59.3, 14.7) | 90.74 m | 1.02 m | 1.12% | 0.73 m | 0.80% |
| 5 | (68.0, 20.9) | 90.74 m | 0.30 m | 0.33% | 0.06 m | 0.07% |
| 6 | (31.9, 20.9) | 90.74 m | 0.33 m | 0.36% | 0.20 m | 0.22% |
| Mean | -- | 90.74 m | 0.61 m | 0.67% | 0.22 m | 0.24% |
| Reference Point | Point Location | Estimated Distance | Distance Error (Before) | Distance Error (After) | ||
|---|---|---|---|---|---|---|
| Absolute | Relative | Absolute | Relative | |||
| 1 | (31.9, 20.9) | 174.63 m | 1.31 m | 0.75% | 0.26 m | 0.15% |
| 2 | (68.0, 20.9) | 174.63 m | 0.7 m | 0.40% | 0.10 m | 0.06% |
| 3 | (68.0, 25.4) | 174.63 m | 1.27 m | 0.73% | 0.20 m | 0.11% |
| 4 | (68.0, 14.7) | 174.63 m | 1.16 m | 0.66% | 0.52 m | 0.30% |
| 5 | (50.0, 25.4) | 174.63 m | 0.47 m | 0.27% | 0.21 m | 0.12% |
| 6 | (50.0, 14.7) | 174.63 m | 0.12 m | 0.07% | 0.08 m | 0.02% |
| 7 | (20.0, 20.9) | 174.63 m | 1.40 m | 0.8% | 0.12 m | 0.07% |
| 8 | (7.47, 20.9) | 174.63 m | 0.57 m | 0.33% | 0.08 m | 0.05% |
| 9 | (7.47, 12.0) | 174.63 m | 0.21 m | 0.12% | 0.03 m | 0.02% |
| Mean | -- | 174.63 m | 0.80 m | 0.46% | 0.18 m | 0.10% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Cheng, W.; Yang, N.; Qiu, S.; Wang, Z.; Wang, J. Smartphone-Based 3D Indoor Pedestrian Positioning through Multi-Modal Data Fusion. Sensors 2019, 19, 4554. https://doi.org/10.3390/s19204554
Zhao H, Cheng W, Yang N, Qiu S, Wang Z, Wang J. Smartphone-Based 3D Indoor Pedestrian Positioning through Multi-Modal Data Fusion. Sensors. 2019; 19(20):4554. https://doi.org/10.3390/s19204554
Chicago/Turabian StyleZhao, Hongyu, Wanli Cheng, Ning Yang, Sen Qiu, Zhelong Wang, and Jianjun Wang. 2019. "Smartphone-Based 3D Indoor Pedestrian Positioning through Multi-Modal Data Fusion" Sensors 19, no. 20: 4554. https://doi.org/10.3390/s19204554
APA StyleZhao, H., Cheng, W., Yang, N., Qiu, S., Wang, Z., & Wang, J. (2019). Smartphone-Based 3D Indoor Pedestrian Positioning through Multi-Modal Data Fusion. Sensors, 19(20), 4554. https://doi.org/10.3390/s19204554