Underwater Acoustic Sensor Networks Node Localization Based on Compressive Sensing in Water Hydrology



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Related Work
3. Correlation Theory and Algorithm based on Compressive Sensing Node Localization
3.1. Compressive Sensing Theory
3.2. Centroid Algorithm
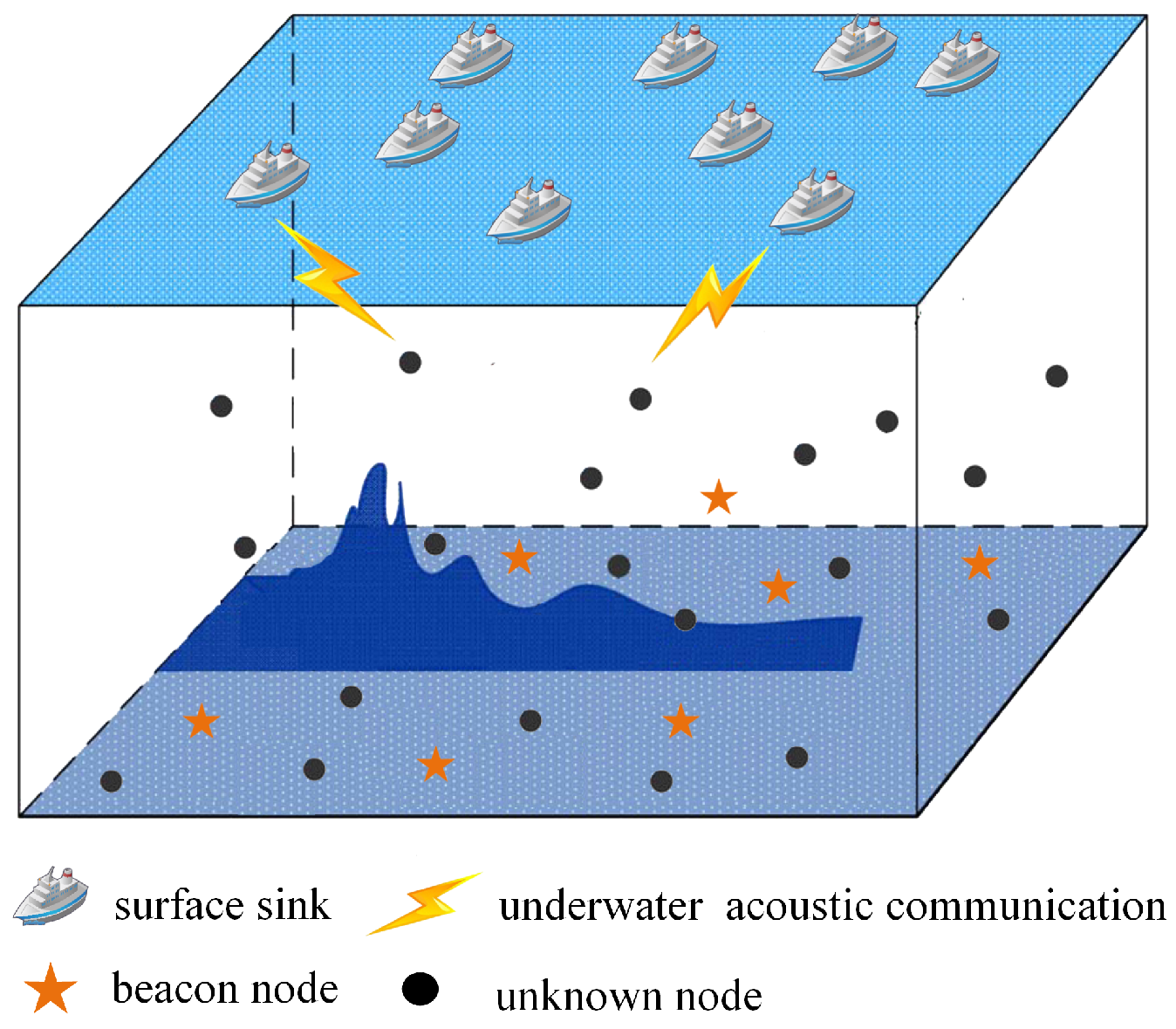
3.3. Underwater Acoustic Sensor Networks Model
3.4. Principle of Localization Algorithm
4. Compressive Sensing Node Localization Algorithm Based on Hops Correction
4.1. Improved Principle
4.2. Number of Hops between Anchor Nodes
4.3. Correction of Hops between Unknown Nodes and Anchor Nodes
4.3.1. Number of Hops from an Unknown Node to Its Nearest Anchor Node
4.3.2. Number of Hops between Unknown Nodes and Other Anchor Nodes
5. Simulation Analysis
5.1. Effectiveness Analysis of Compressive Sensing Algorithm
5.2. Compression Ratio Analysis
5.3. The Relationship between the Localization Error and the Proportion of Beacon Nodes
5.4. The Relationship between Localization Performance and Communication Radius
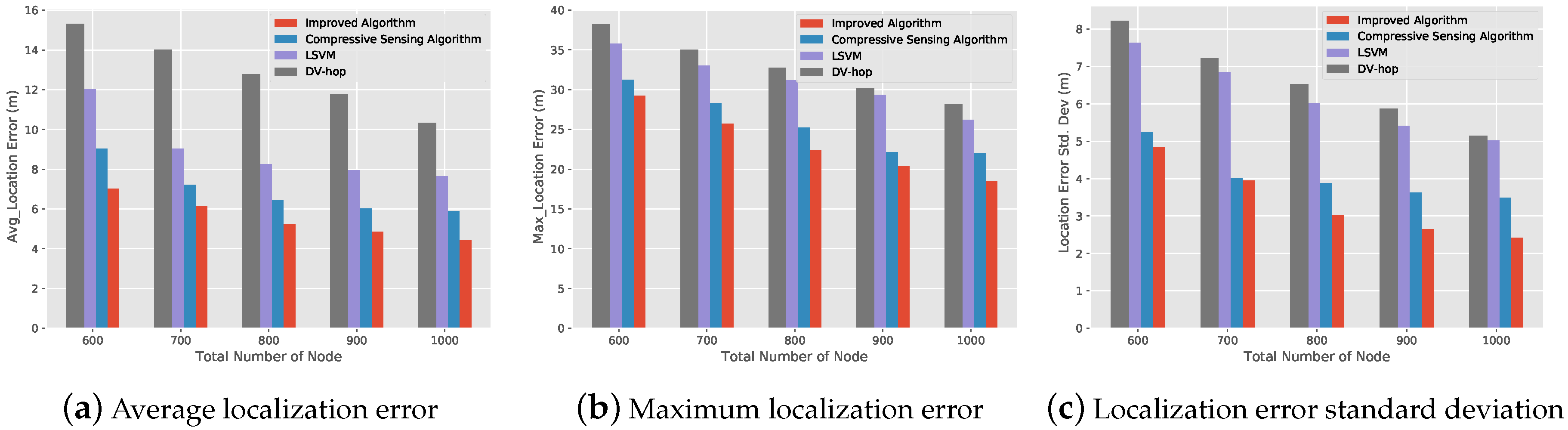
5.5. The Relationship Diagram between Localization Performance and Total Node Number
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Singh, A. Managing the salinization and drainage problems of irrigated areas through remote sensing and GIS techniques, Ecological Indicators. Ecol. Indic. 2018, 89, 584–589. [Google Scholar] [CrossRef]
- Jiang, S.M.; Fan, J.H.; Xia, X.M.; Li, X.W.; Zhang, R.C. An Effective Kalman Filter-Based Method for Groundwater Pollution Source Identification and Plume Morphology Characterization. Water 2018, 10, 1063. [Google Scholar] [CrossRef]
- Ali, B.; Sher, N.; Aurangzeb, K.; Haider, S.I. Retransmission avoidance for reliable data delivery in underwater WSNs. Sensors 2018, 18, 149. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Han, X.; Yin, J.; Li, Y. Adaption penalized complex LMS for sparse under-ice acoustic channel estimations. IEEE Access 2018, 6, 63214–63222. [Google Scholar] [CrossRef]
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A survey of underwater optical wireless communications. IEEE Commun. Surv. Tutor. 2017, 19, 204–238. [Google Scholar] [CrossRef]
- Lin, Y.; Zhu, X.; Zheng, Z.; Dou, Z.; Zhou, R. The individual identification method of wireless device based on dimensionality reduction and machine learning. J. Supercomput. 2019, 75, 3010–3027. [Google Scholar] [CrossRef]
- Gui, G.; Huang, H.; Song, Y.; Sari, H. Deep learning for an effective nonorthogonal multiple access scheme. IEEE Trans. Veh. Technol. 2018, 67, 8440–8450. [Google Scholar] [CrossRef]
- Han, G.J.; Jiang, J.F.; Shu, L.; Xu, Y.J.; Wang, F. Localization Algorithms of Underwater Wireless Sensor Networks: A Survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Wu, W.B.; Lim, S.J. An Asynchronous Clustering and Mobile Data Gathering Schema based on Timer Mechanism in Wireless Sensor Networks. Comput. Mater. Contin. 2019, 58, 711–725. [Google Scholar] [CrossRef]
- Han, G.J.; Zhang, C.Y.; Shu, L.; Sun, N.; Li, Q.W. A Survey on Deployment Algorithms in Underwater Acoustic Sensor Networks. Int. J. Distrib. Sens. Netw. 2013, 9, 314049. [Google Scholar] [CrossRef]
- Williams, D.P. AUV-enabled adaptive underwater surveying for optimal data collection. Intell. Serv. Rob. 2012, 5, 33–55. [Google Scholar] [CrossRef]
- Han, G.J.; Zhang, C.Y.; Shu, L.; Rodrigues, J.J.P.C. Impacts of deployment strategies on localization performance in underwater acoustic sensor networks. IEEE Trans. Ind. Electron. 2015, 62, 1725–1733. [Google Scholar] [CrossRef]
- Luo, H.J.; Guo, Z.W.; Dong, W.; Hong, F.; Zhao, Y.Y. LDB: Localization with directional beacons for sparse 3D underwater acoustic sensor networks. J. Netw. 2010, 5, 28–38. [Google Scholar] [CrossRef]
- Lin, Y.; Wang, C.; Wang, J.X.; Dou, Z. A Novel Dynamic Spectrum Access Framework Based on Reinforcement Learning for Cognitive Radio Sensor Networks. Sensors 2016, 16, 1675. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.Y.; Guo, X.H.; Lin, Y. Trust Management Method of D2D Communication Based on RF Fingerprint Identification. IEEE Access 2018, 6, 66082–66087. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theor. 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.L.; Plan, Y. A probabilistic and RIP less theory of compressed sensing. IEEE Trans. Inf. Theor. 2011, 57, 7235–7254. [Google Scholar] [CrossRef]
- Chaurasiya, V.K.; Jain, N.; Nandi, G.C. A novel distance estimation approach for 3D localization in wireless sensor network using multi dimensional scaling. Inf. Fusion 2014, 15, 5–18. [Google Scholar] [CrossRef]
- Shao, H.J.; Zhang, X.P.; Wang, Z. Efficient closed-form algorithms for AOA based self-localization of sensor nodes using auxiliary variables. IEEE Trans. Signal Process. 2014, 62, 2580–2594. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, X.; Gao, Q.; Ma, X.; Feng, X.; Wang, H. Device-free simultaneous wireless localization and activity recognition with wavelet feature. IEEE Trans. Veh. Technol. 2017, 66, 1659–1669. [Google Scholar] [CrossRef]
- Meertens, L. The Distributed Construction of a Global Coordinate system in a Network of Static Computational Nodes from Inter-Node Distances. Kestrel Inst. TR KES. U 2004, 66, 1–17. [Google Scholar]
- Tran, D.A.; Nguyen, T. Localization in Wireless Sensor Networks Based on Support Vector Machines. IEEE Trans. Parallel Distrib. Syst. 2008, 19, 981–994. [Google Scholar] [CrossRef]
- Wang, P.H.; Xue, F.; Li, H.J.; Cui, Z.H.; Xie, L.P.; Chen, J.J. A Multi-Objective DV-Hop Localization Algorithm Based on NSGA-II in Internet of Things. Mathematics 2019, 7, 184. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Yin, X.; Li, F.; Kim, H.J. An Enhanced PEGASIS Algorithm with Mobile Sink Support for Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2018, 8, 1–9. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.K.; Kim, H.J. Energy Efficient Routing Algorithm with Mobile Sink Support for Wireless Sensor Networks. Sensors 2019, 19, 1494. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Wang, K.; Sangaiah, A.K.; Lim, S.J. An Affinity Propagation-Based Self-Adaptive Clustering Method for Wireless Sensor Networks. Sensors 2019, 19, 2579. [Google Scholar] [CrossRef]
- Zhao, C.H.; Xu, Y.L.; Huang, H. Node Localization Algorithm Based on Compressed Sensing in Wireless Sensing Network. J. Shenyang Univ. 2013, 25, 454–461. (In Chinese) [Google Scholar]
- He, F.X.; Yu, Z.J.; Liu, H.T. Multiple TargetLocalization via Compressed Sensing in Wireless Sensor Networks. J. Electron. Inf. Technol. 2012, 34, 716–721. [Google Scholar]
- Zhao, C.H.; Xu, Y.L.; Huang, H. Localization Algorithm of Sparse Targets Based on LU-decomposition. J. Electron. Inf. 2013, 35, 2234–2239. [Google Scholar] [CrossRef]
- Fazel, F.; Fazel, M.; Stojanovicm, M. Compressed sensing in random access net works with applications to underwater monitoring. Phys. Commun. 2012, 5, 148–160. [Google Scholar] [CrossRef]
- Liu, C.; Wang, X.; Luo, H.J.; Liu, Y.; Guo, Z.W. VA: Virtual Node Assisted Localization Algorithm for Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 86717–86729. [Google Scholar] [CrossRef]
- Yu, K.C.; Hao, K.; Li, C.; Du, X.J.; Wang, B.B.; Liu, Y.L. An Improved TDoA Localization Algorithm Based on AUV for Underwater Acoustic Sensor Networks. In Proceedings of the Artificial Intelligence for Communications and Networks AICON 2019, Harbin, China, 25–26 May 2019; pp. 419–434. [Google Scholar]
- Lin, Y.; Tao, H.X.; Tu, Y.; Liu, T. A Node Self-Localization Algorithm With a Mobile Anchor Node in Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 43773–43780. [Google Scholar] [CrossRef]
- Wang, J.; Urriza, P.; Han, Y.X.; Cabric, D. Weighted centroid localization algorithm: Theoretical analysis and distributed implementation. IEEE Trans. Wirel. Commun. 2019, 10, 3403–3413. [Google Scholar] [CrossRef]
- Xiao, L.P.; Liu, X.H. DV-Hop Localization Algorithm Based on Hop Amendment. J. Sens. Actuators 2012, 25, 1726–1730. [Google Scholar]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Lin, Y.; Tao, H.; Sharma, P.K.; Wang, J. Underwater Acoustic Sensor Networks Node Localization Based on Compressive Sensing in Water Hydrology. Sensors 2019, 19, 4552. https://doi.org/10.3390/s19204552
Wang S, Lin Y, Tao H, Sharma PK, Wang J. Underwater Acoustic Sensor Networks Node Localization Based on Compressive Sensing in Water Hydrology. Sensors. 2019; 19(20):4552. https://doi.org/10.3390/s19204552
Chicago/Turabian StyleWang, Sen, Yun Lin, Hongxu Tao, Pradip Kumar Sharma, and Jin Wang. 2019. "Underwater Acoustic Sensor Networks Node Localization Based on Compressive Sensing in Water Hydrology" Sensors 19, no. 20: 4552. https://doi.org/10.3390/s19204552
APA StyleWang, S., Lin, Y., Tao, H., Sharma, P. K., & Wang, J. (2019). Underwater Acoustic Sensor Networks Node Localization Based on Compressive Sensing in Water Hydrology. Sensors, 19(20), 4552. https://doi.org/10.3390/s19204552