Modeling and Optimal Design for a High Stability 2D Optoelectronic Angle Sensor


 ,
,  ,
,
Abstract
1. Introduction
2. Principle and Error Modeling of a 2D Angle Sensor
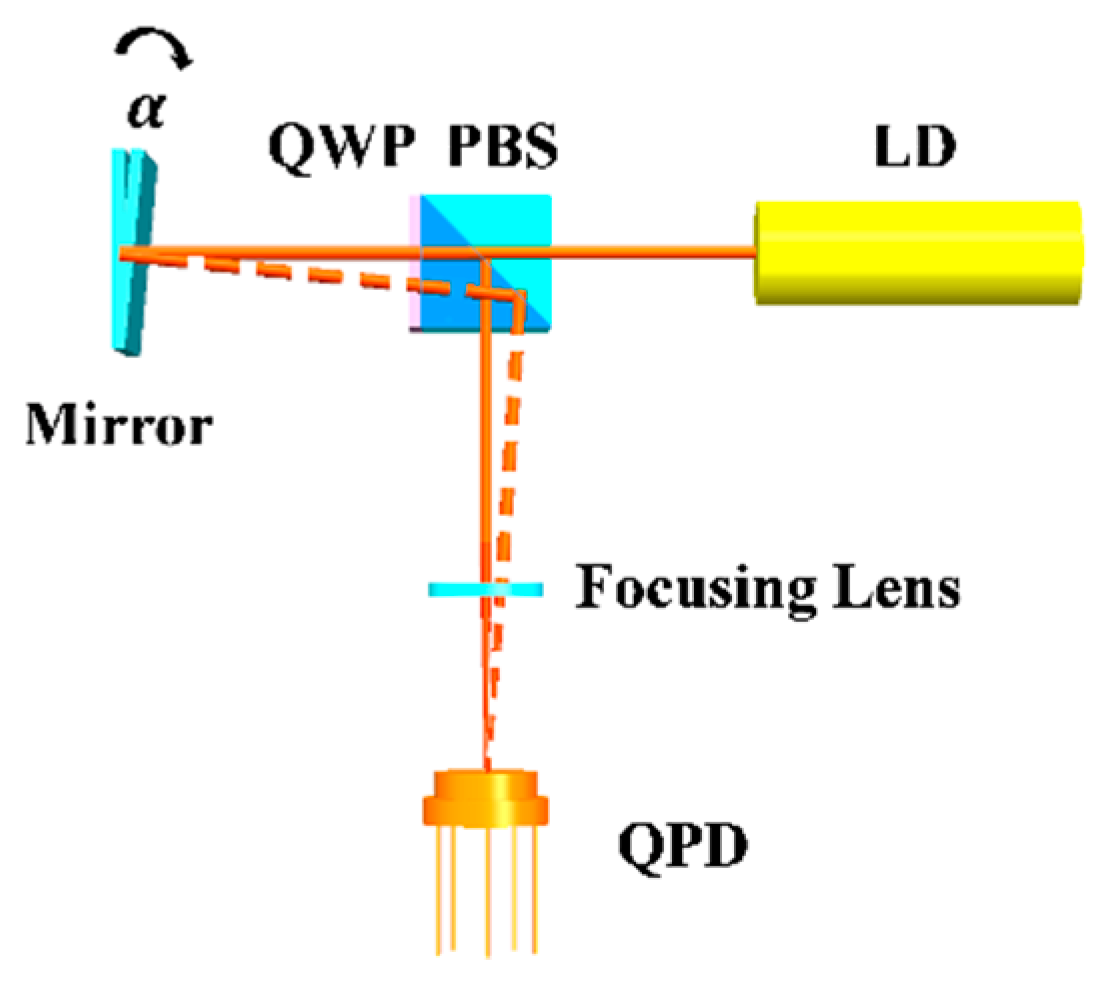
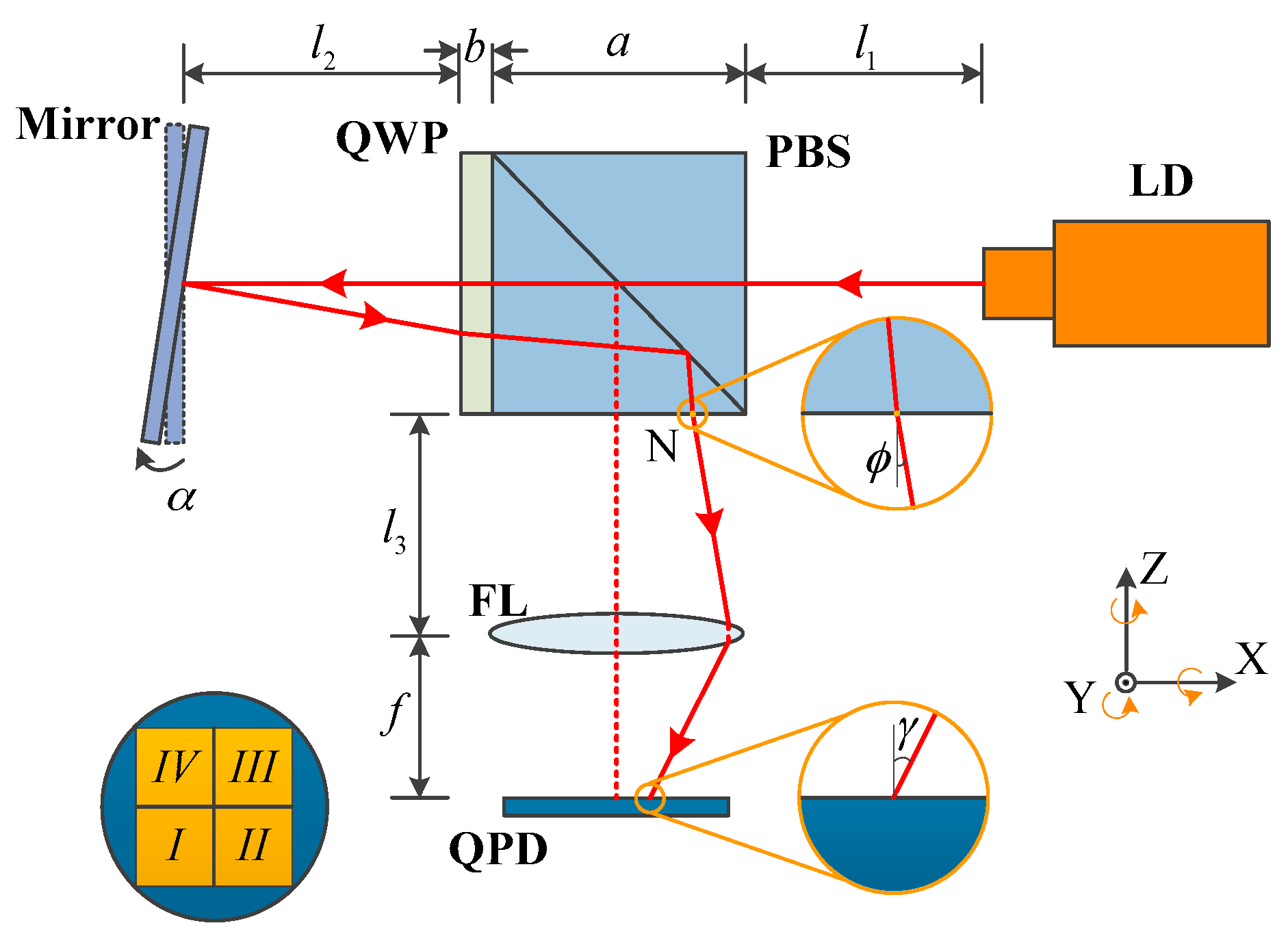
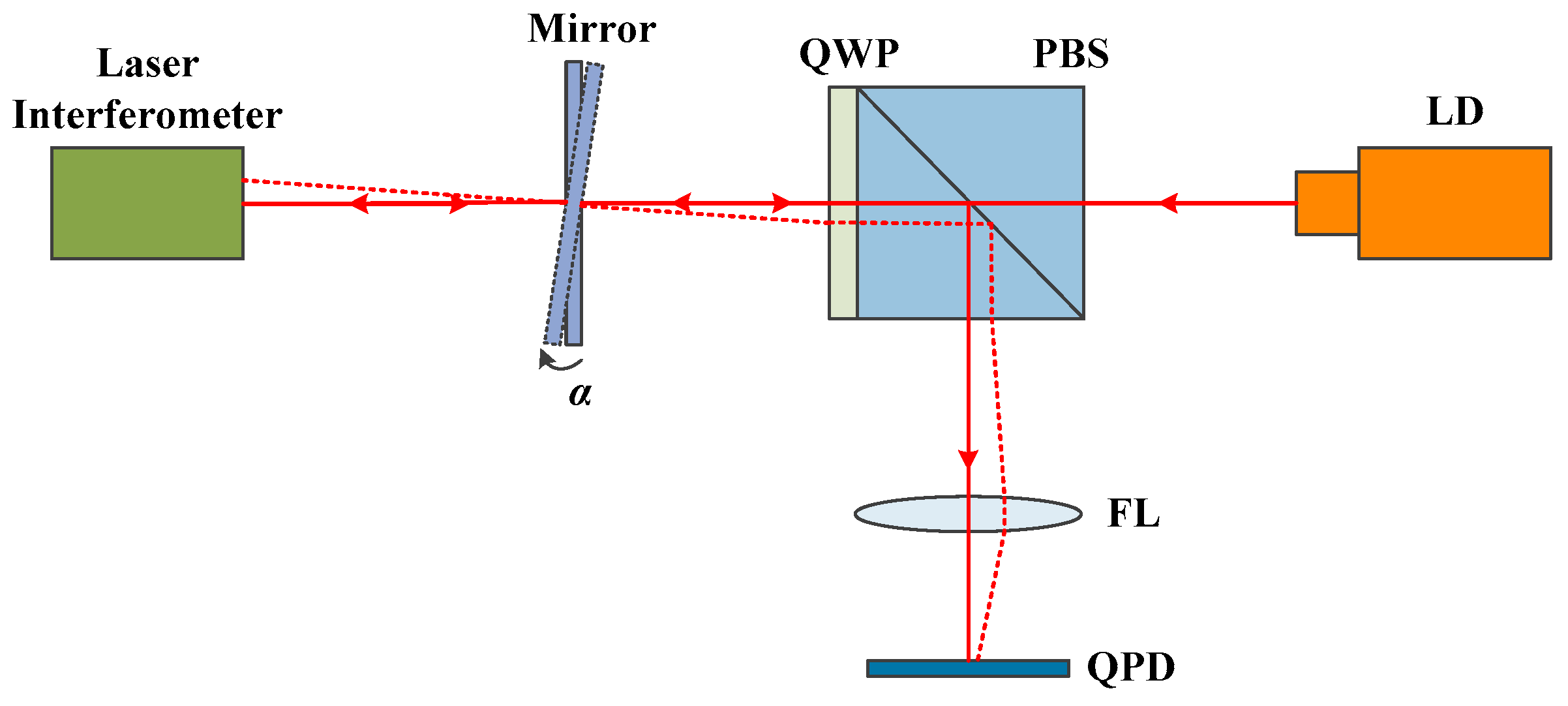
2.1. Principle
2.2. Error Modeling
3. Sensitivity Analysis and Optimization
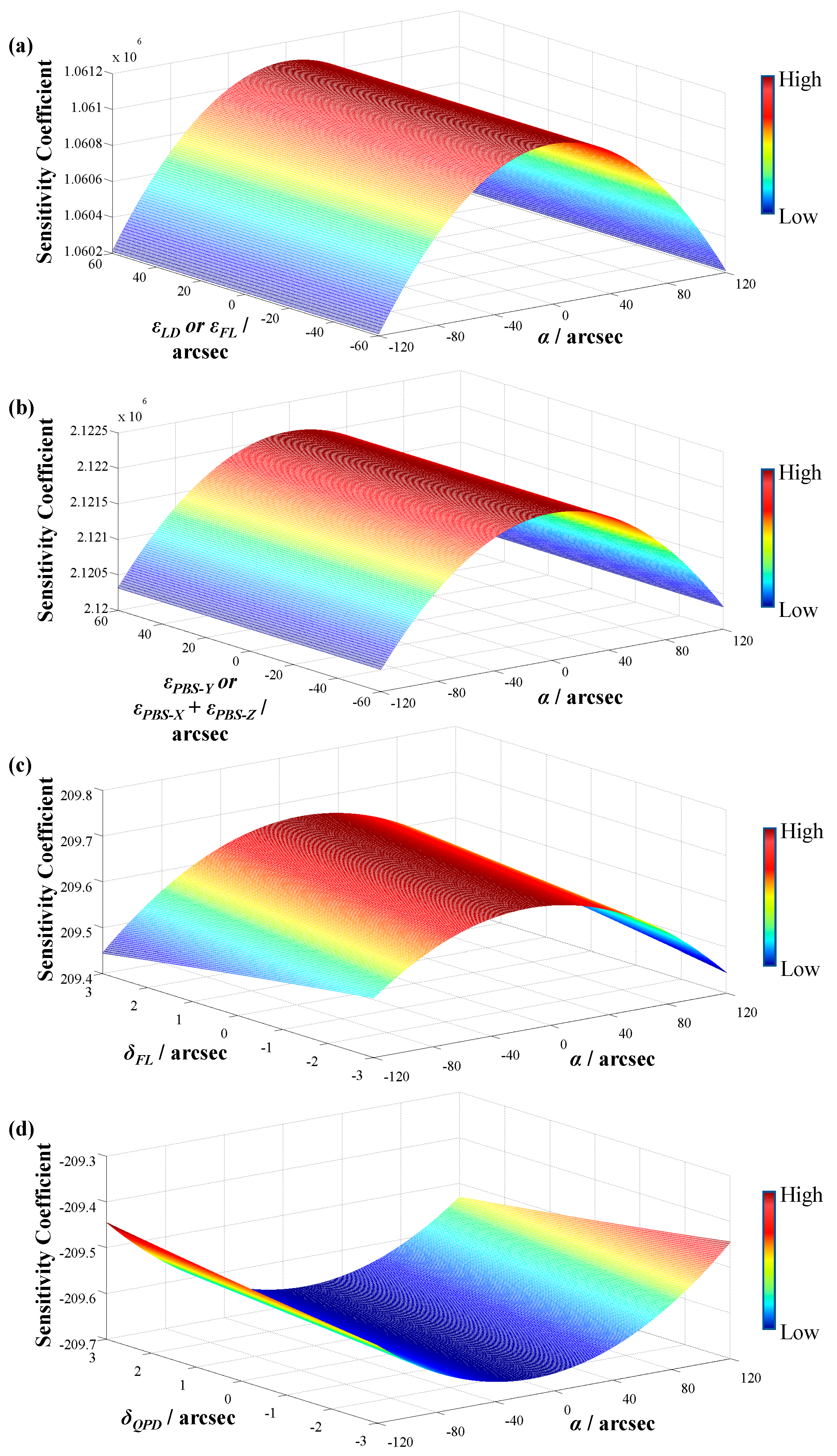
3.1. Measurement Model and Error Sensitivity Analysis
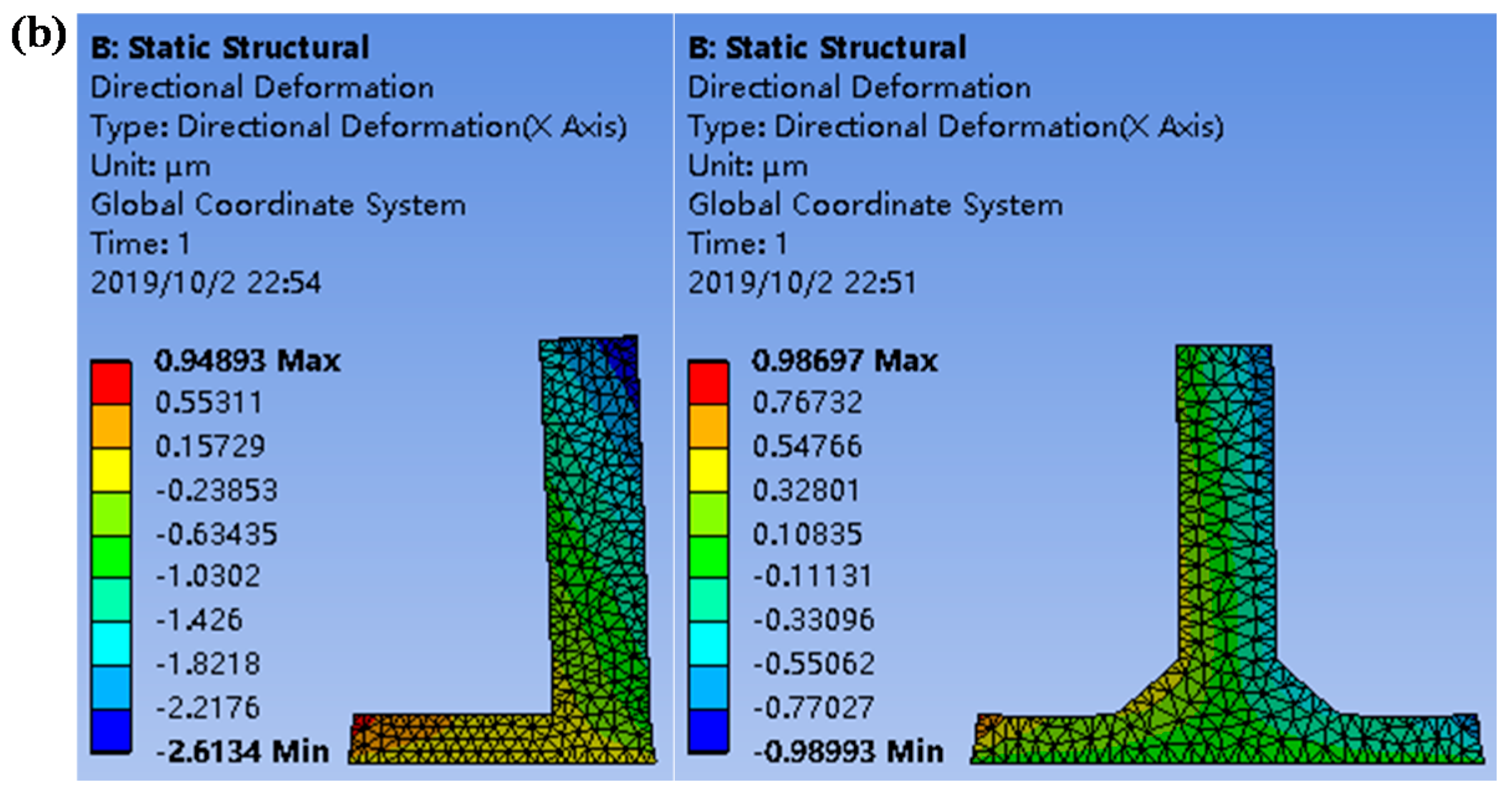
3.2. Optimized Design and Simulation for Key Optical Mounts
4. Experiments and Results
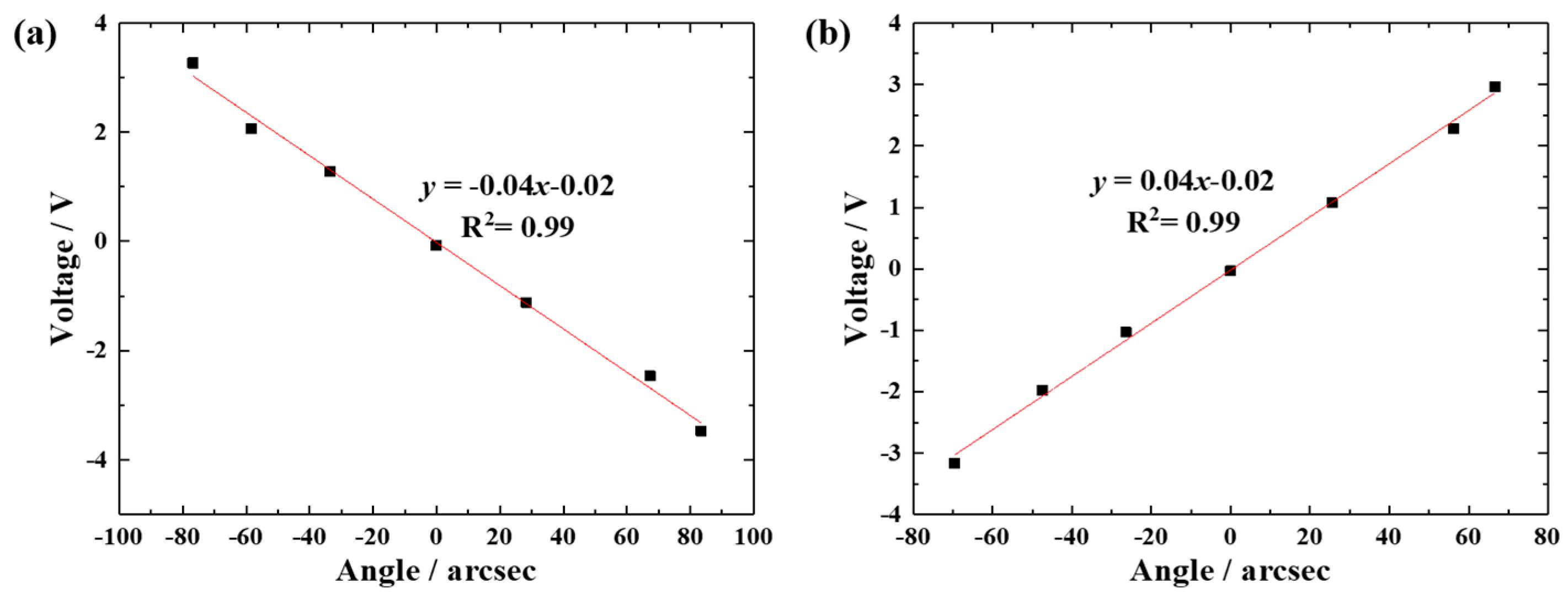
4.1. Calibration
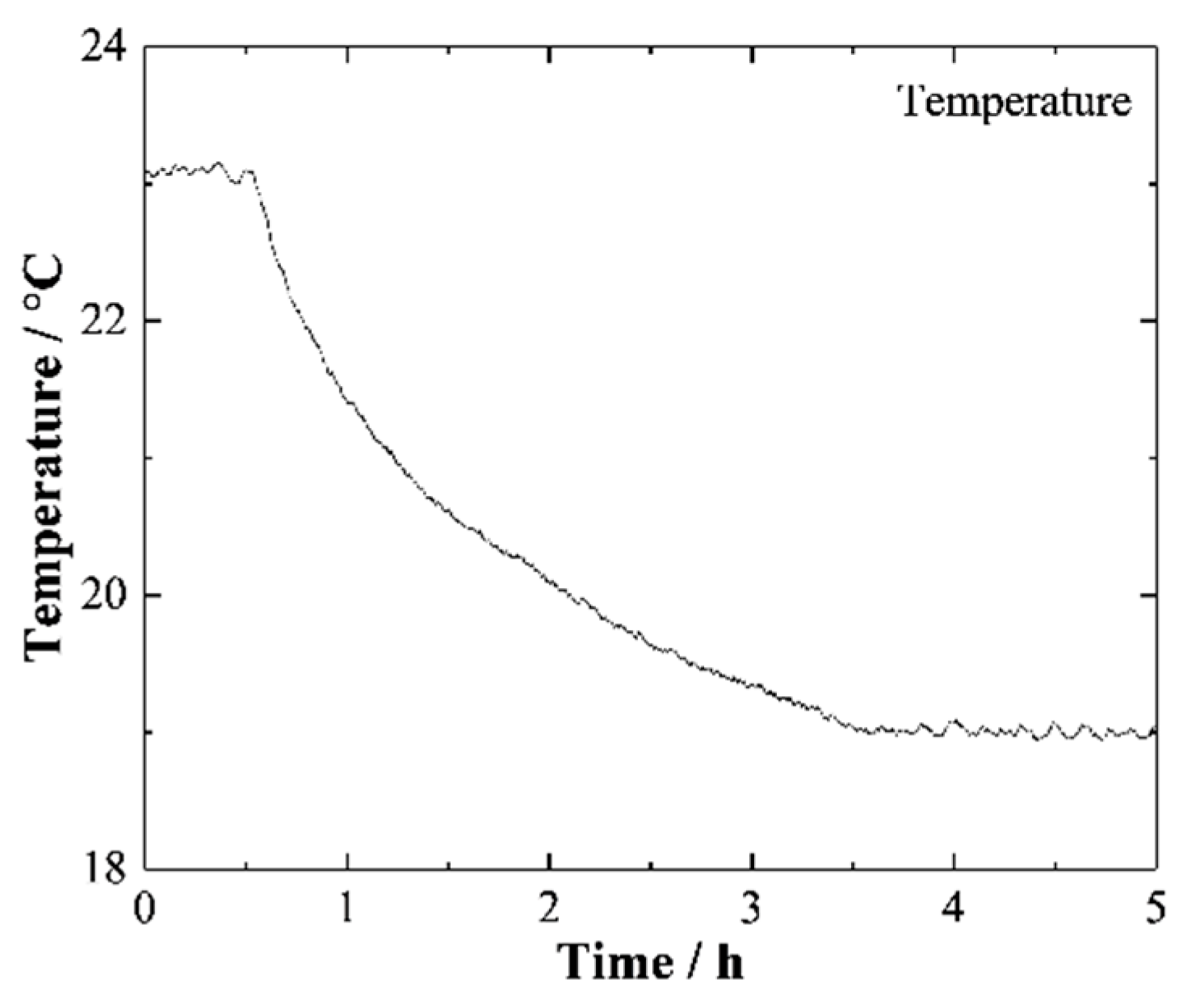
4.2. Thermal Stability Experiments
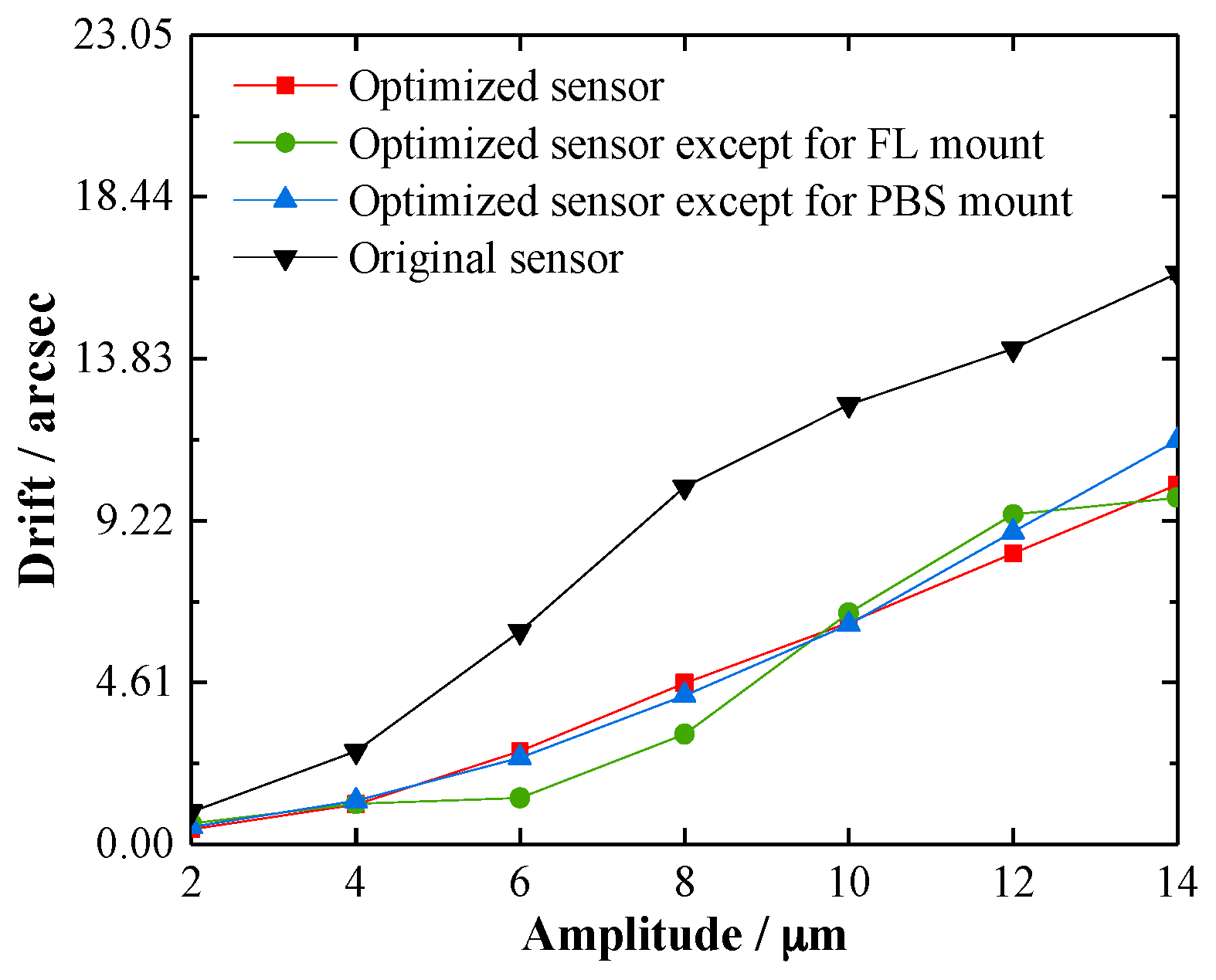
4.3. Vibration Stability Experiments
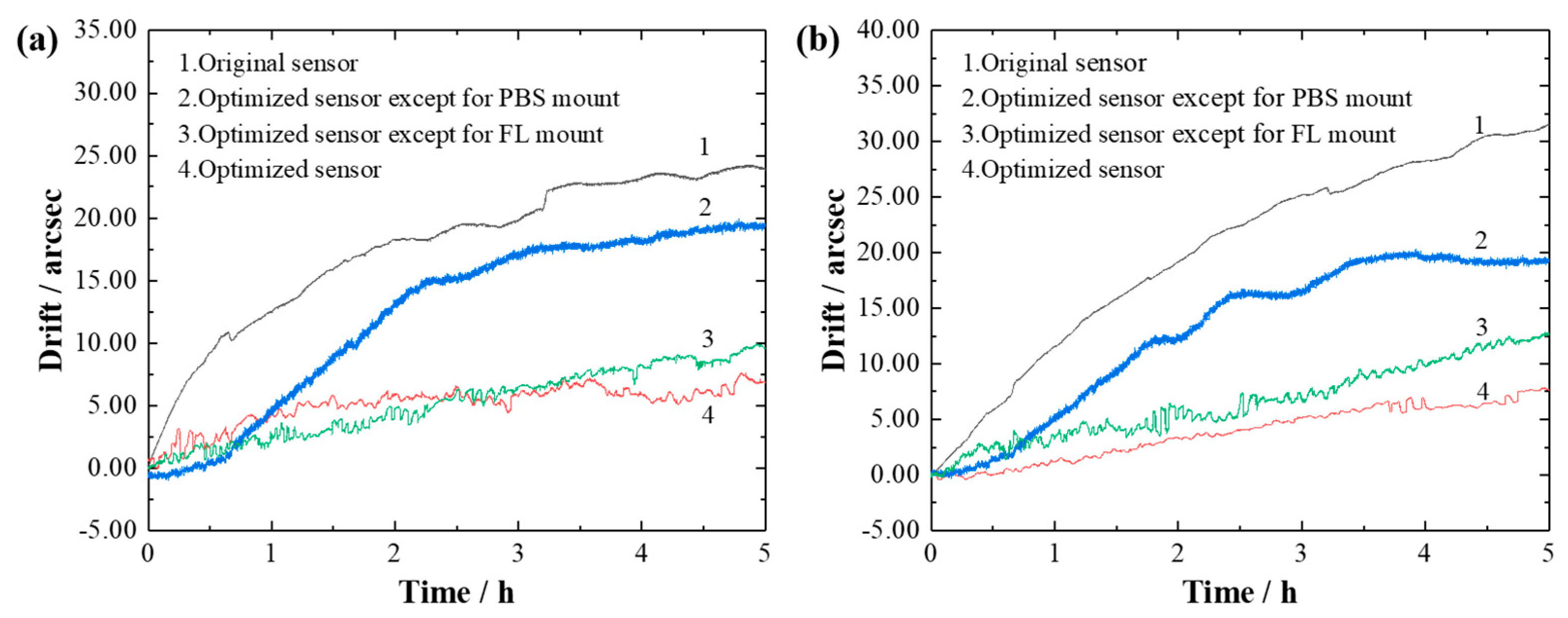
4.4. Drift Error Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fan, K.C.; Fei, Y.T.; Yu, X.F.; Chen, Y.J.; Wang, W.L.; Liu, Y.S. Development of a low-cost micro-CMM for 3D micro/nano measurements. Meas. Sci. Technol. 2006, 17, 524–532. [Google Scholar] [CrossRef]
- Li, R.J.; Fan, K.C.; Miao, J.W.; Huang, Q.X.; Tao, S.; Gong, E.M. An analogue contact probe using a compact 3D optical sensor for micro/nano coordinate measuring machines. Meas. Sci. Technol. 2014, 25, 094008. [Google Scholar] [CrossRef]
- Li, R.J.; Fan, K.C.; Huang, Q.X.; Zhou, H.; Gong, E.M.; Xiang, M. A long-stroke 3D contact scanning probe for micro/nano coordinate measuring machine. Precis. Eng. 2016, 43, 220–229. [Google Scholar] [CrossRef]
- Li, R.J.; Xiang, M.; He, Y.X.; Fan, K.C.; Cheng, Z.Y.; Huang, Q.X.; Zhou, B. Development of a high-precision touch-trigger probe using a single sensor. Appl. Sci. 2016, 6, 86. [Google Scholar] [CrossRef]
- Zhang, X.F.; Huang, Q.X.; Yuan, Y.; Huang, H. Large stroke 2-DOF nano-positioning stage with angle error correction. Opt. Precis. 2013, 21, 1811–1817. [Google Scholar] [CrossRef]
- Zhu, F.; Tan, J.; Cui, J. Common-path design criteria for laser datum based measurement of small angle deviations and laser autocollimation method in compliance with the criteria with high accuracy and stability. Opt. Express 2013, 21, 11391–11403. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.B.; Fan, K.C.; Sun, W.; Liu, S.J. Low cost, compact 4-DOF measurement system with active compensation of beam angular drift error. Opt. Express 2018, 26, 17185–17198. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.; Hong, J.; Kim, Y.S.; Lee, D.Y.; Lee, K.; Lee, S.M.; Park, S.I. Atomic force microscope with improved scan accuracy, scan speed, and optical vision. Rev. Sci. Instrum. 2003, 74, 4378–4383. [Google Scholar] [CrossRef]
- Zhu, J.; Sun, R.G. Introduction to atomic force microscope and its manipulation. Life Sci. Instrum. 2005, 3, 22–26. [Google Scholar]
- Li, R.J.; Fan, K.C.; Qian, J.Z.; Huang, Q.X.; Gong, W.; Miao, J.W. Stability analysis of contact scanning probe for micro/nano coordinate measuring machine. Nanotechnol. Precis. Eng. 2012, 10, 125–131. [Google Scholar]
- Manske, E.; Jager, G.; Hausotte, T.; Fussl, R. Recent developments and challenges of nanopositioning and nanomeasuring technology. Meas. Sci. Technol. 2012, 23, 074001. [Google Scholar] [CrossRef]
- Fei, Y.T. Theory and Application of Mechanical Thermal Deformation; National Defense Industry Press: Beijing, China, 2009; pp. 100–130. [Google Scholar]
- Feng, J.; Li, R.J.; Fan, K.C.; Zhou, H.; Zhang, H. Development of a low-cost and vibration-free constant-temperature chamber for precision measurement. Sens. Mater. 2015, 27, 329–340. [Google Scholar]
- Feng, Q.; Zhang, B.; Kuang, C. A straightness measurement system using a single-mode fiber-coupled laser module. Opt. Laser Technol. 2004, 36, 279–283. [Google Scholar] [CrossRef]
- Kuang, C.; Feng, Q.; Zhang, B.; Liu, B.; Chen, S.; Zhang, Z. A four-degree-of-freedom laser measurement system (FDMS) using a single-mode fiber-coupled laser module. Sens. Actuators A Phys. 2005, 125, 100–108. [Google Scholar] [CrossRef]
- Hao, Q.; Li, D.; Wang, Y. High-accuracy long distance alignment using single-mode optical fiber and phase plate. Opt. Laser Technol. 2002, 34, 287–292. [Google Scholar] [CrossRef]
- Shimizu, Y.; Tan, S.L.; Murata, D.; Maruyama, T.; Ito, S.; Chen, Y.L.; Gao, W. Ultra-sensitive angle sensor based on laser autocollimation for measurement of stage tilt motions. Opt. Express 2016, 24, 2788–2805. [Google Scholar] [CrossRef] [PubMed]
- Li, R.J.; Xu, P.; Tang, S.T.; Fan, K.C.; Huang, Q.X.; Hu, P.H. Thermal stability analysis and optimal design for a two-dimensional angle sensor. Appl. Mech. Mater. 2017, 868, 3–8. [Google Scholar] [CrossRef]
- Lin, Z.Q.; Li, H.J.; Lang, Y.H. Obtaining spot parameters by quadrant photodetectors. Opt. Precis. Eng. 2009, 17, 764–770. [Google Scholar]
- Li, R.J.; Lei, Y.J.; Zhang, L.S.; Chang, Z.X.; Fan, K.C.; Cheng, Z.Y.; Hu, P.H. High-precision and low-cost vibration generator for low-frequency calibration system. Meas. Sci. Technol. 2017, 29, 034008. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Drift | Advantage | Disadvantage | Reference |
|---|---|---|---|---|
| Constant temperature chamber | 5 nm in 3 h | High accuracy | Bulky, high cost, high energy consumption | Li et al. [4,13] |
| Single-mode fiber-coupled lasers | Standard deviation: 0.86 μm in 0.5 h (X), 0.27 μm in 0.5 h (Y) | The laser’s drift is controlled | Other components’ drifts unconsidered | Feng et al. [14] |
| ± 0.3 arcsec in 55 min (pitch), ± 0.4 arcsec in 55 min (yaw) | Kuang et al. [15] | |||
| Standard deviation: 6.035 μm in 3 h (X), 4.285 μm in 3 h (Y) | Hao et al. [16] | |||
| Angle Detection with single-cell photodiodes (SPDs) | — | High sensitivity and resolution | Stability unknown | Shimizu et al. [17] |
| Compensation with a common-path sensor | 0.02 arcsec in 2 h | Passive compensation method | Complex, high cost | Zhu et al. [6] |
| Compensation with two piezoelectric actuators (PZTs) | ± 0.01 arcsec | Real time compensation | Complex, high cost | Huang et al. [7] |
| Symmetrical structure | 0.12 arcsec (temperature changes 5 °C) | Effective, convenient, and economic | Only thermal drift, wholly optimized with experience, suitable for simple sensors | Li et al. [18] |
| Temperature (20 °C) | ±2 | ±5 | ±10 | ±20 | — | ±2 | ±5 | ±10 | ±20 |
|---|---|---|---|---|---|---|---|---|---|
| Fixed Mount | Maximum Deformations (μm) | Effective Lengths (mm) | Angular Errors (arcsec) | ||||||
| Original PBS mount | 0.66 | 1.66 | 3.31 | 6.62 | 12 | 11.4 | 28.5 | 56.9 | 113.9 |
| Optimized PBS mount | 0.17 | 0.42 | 0.85 | 1.69 | 12 | 2.9 | 7.3 | 14.6 | 29.1 |
| Original FL mount | 0.47 | 1.19 | 2.37 | 4.75 | 16 | 6.1 | 15.3 | 30.6 | 61.2 |
| Optimized FL mount | 0.09 | 0.22 | 0.44 | 0.88 | 14 | 1.3 | 3.2 | 6.5 | 12.9 |
| Type of the Angle | Maximum Drift Errors | ||
|---|---|---|---|
| Sensors | (arcsec) | (arcsec) | (arcsec) |
| Original sensor | 32.12 | 16.26 | 36.00 |
| Optimized sensor except for PBS mount | 19.90 | 11.50 | 22.98 |
| Optimized sensor except for FL mount | 13.63 | 9.87 | 16.83 |
| Optimized sensor | 8.36 | 10.24 | 13.22 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Z.; Liu, L.; Xu, P.; Li, R.; Fan, K.-C.; Li, H.; Wei, Y. Modeling and Optimal Design for a High Stability 2D Optoelectronic Angle Sensor. Sensors 2019, 19, 4409. https://doi.org/10.3390/s19204409
Cheng Z, Liu L, Xu P, Li R, Fan K-C, Li H, Wei Y. Modeling and Optimal Design for a High Stability 2D Optoelectronic Angle Sensor. Sensors. 2019; 19(20):4409. https://doi.org/10.3390/s19204409
Chicago/Turabian StyleCheng, Zhenying, Liying Liu, Peng Xu, Ruijun Li, Kuang-Chao Fan, Hongli Li, and Yongqing Wei. 2019. "Modeling and Optimal Design for a High Stability 2D Optoelectronic Angle Sensor" Sensors 19, no. 20: 4409. https://doi.org/10.3390/s19204409
APA StyleCheng, Z., Liu, L., Xu, P., Li, R., Fan, K.-C., Li, H., & Wei, Y. (2019). Modeling and Optimal Design for a High Stability 2D Optoelectronic Angle Sensor. Sensors, 19(20), 4409. https://doi.org/10.3390/s19204409