A Physical Model-Based Observer Framework for Nonlinear Constrained State Estimation Applied to Battery State Estimation


Abstract
1. Introduction
1.1. State of the Art in Estimation Toolboxes Using Kalman Filter Techniques
1.2. State of the Art in Battery Modelling and State Estimation
1.3. Contributions and Focus of the Work
2. Design of a Modelica Based Estimation Framework
2.1. Model Evaluations in State Estimation Algorithms
2.2. The Extended Kalman Filter Calculation Steps
| Algorithm 1. EKF Algorithm with FMU evaluations |
while (break==false) do Predict estimation by means of the FMU: Correct estimation with current measurements: end while |
| Algorithm 2. Numerical differential quotient determination |
| 1. for do end for |
2.3. The Unscented Kalman Filter Sigma Point Prediction Step
| Algorithm 3. UKF prediction step with FMU evaluations |
| 1. fordo end for end for |
2.4. Utilizing an FMU in an Estimation Algorithm
2.5. Notes on Detectability and Observability
3. Kalman Filter Theory Extension with Inequality Constraints
3.1. The Formulation of State Constraints
3.2. The Simplified Newton Descent Search Approach
| Algorithm 4. Simplified Newton descent search algorithm for constrained estimation projection. |
| 1. while and do end while Solution: |
4. A Constrained Nonlinear Battery Observer
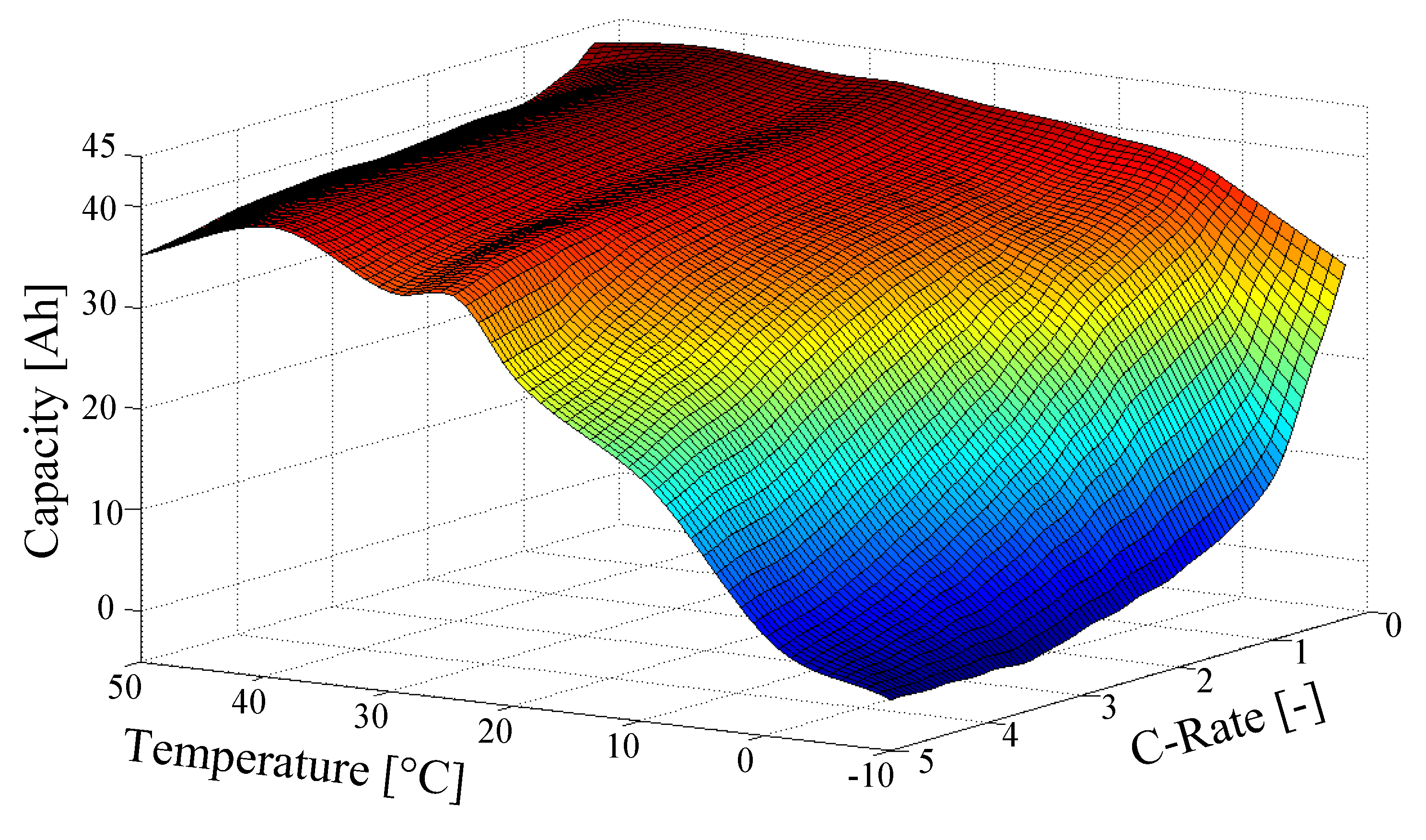
4.1. An Equations and Grid Table Combined Cell Model
4.2. Cell Model Parameter Derivation and Validation
4.3. Kalman Filter Setup – Perfect Measurements
4.4. Observer Configuration on an Embedded Microcontroller
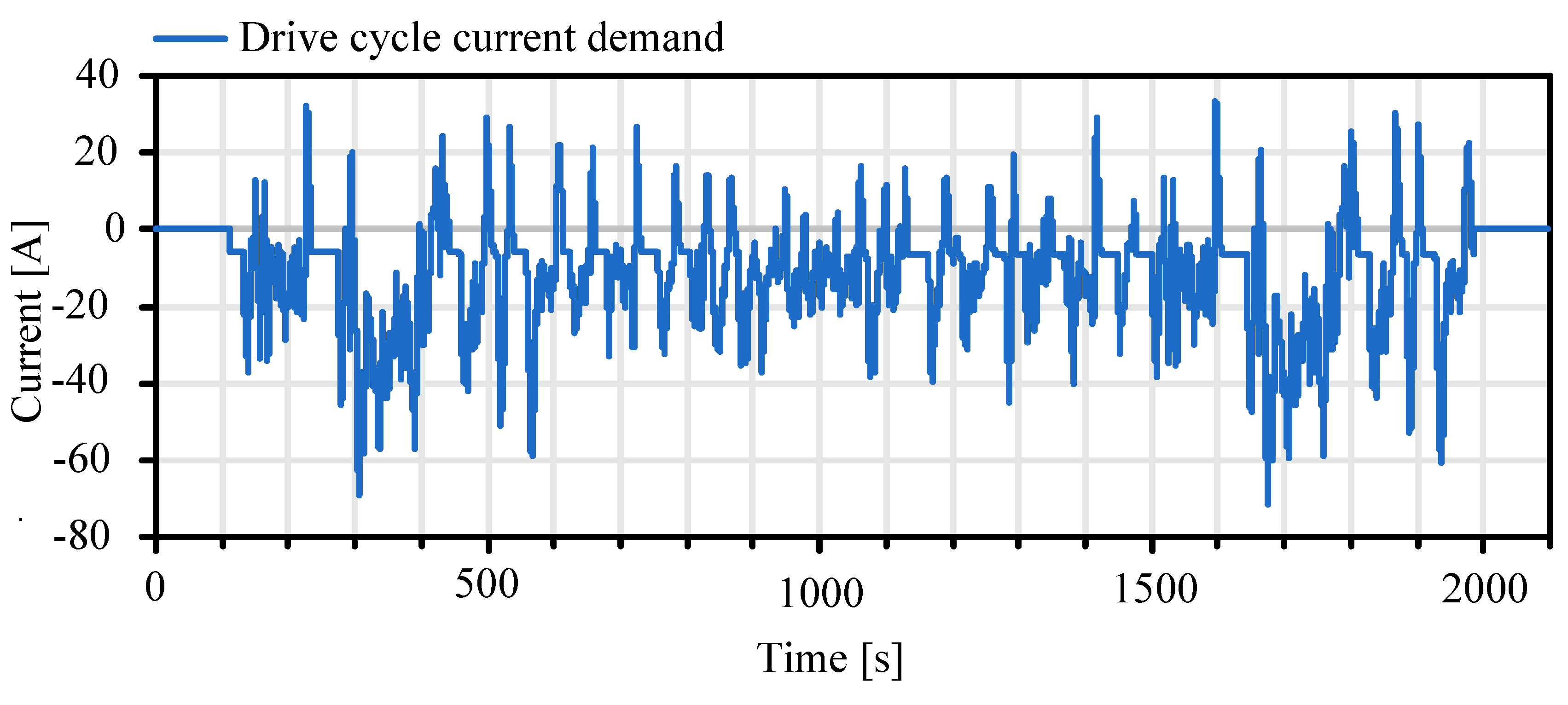
4.5. Parameterization and Model Validation
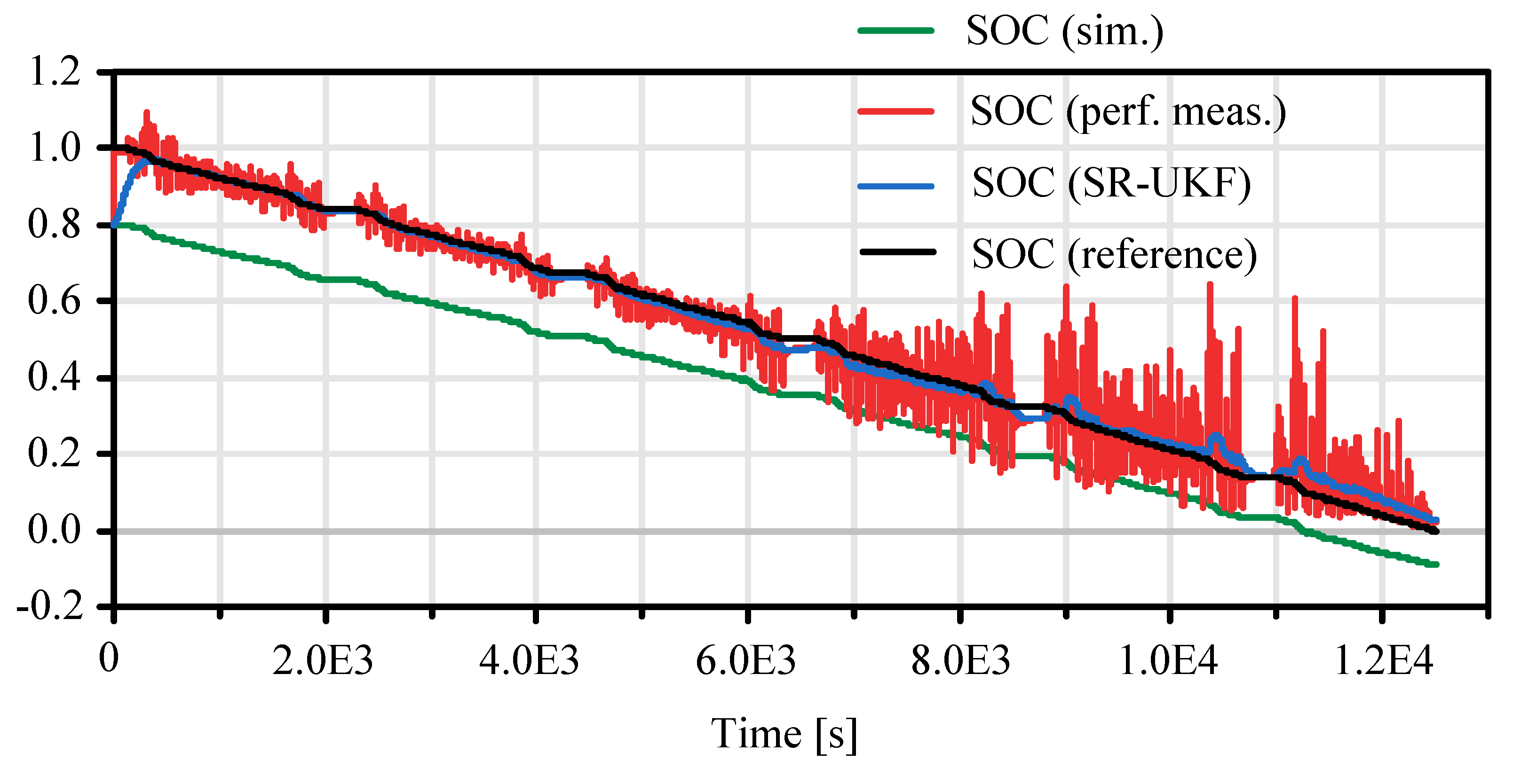
4.6. Extension to Inequality Constraint SOC Estimation
5. Conclusions
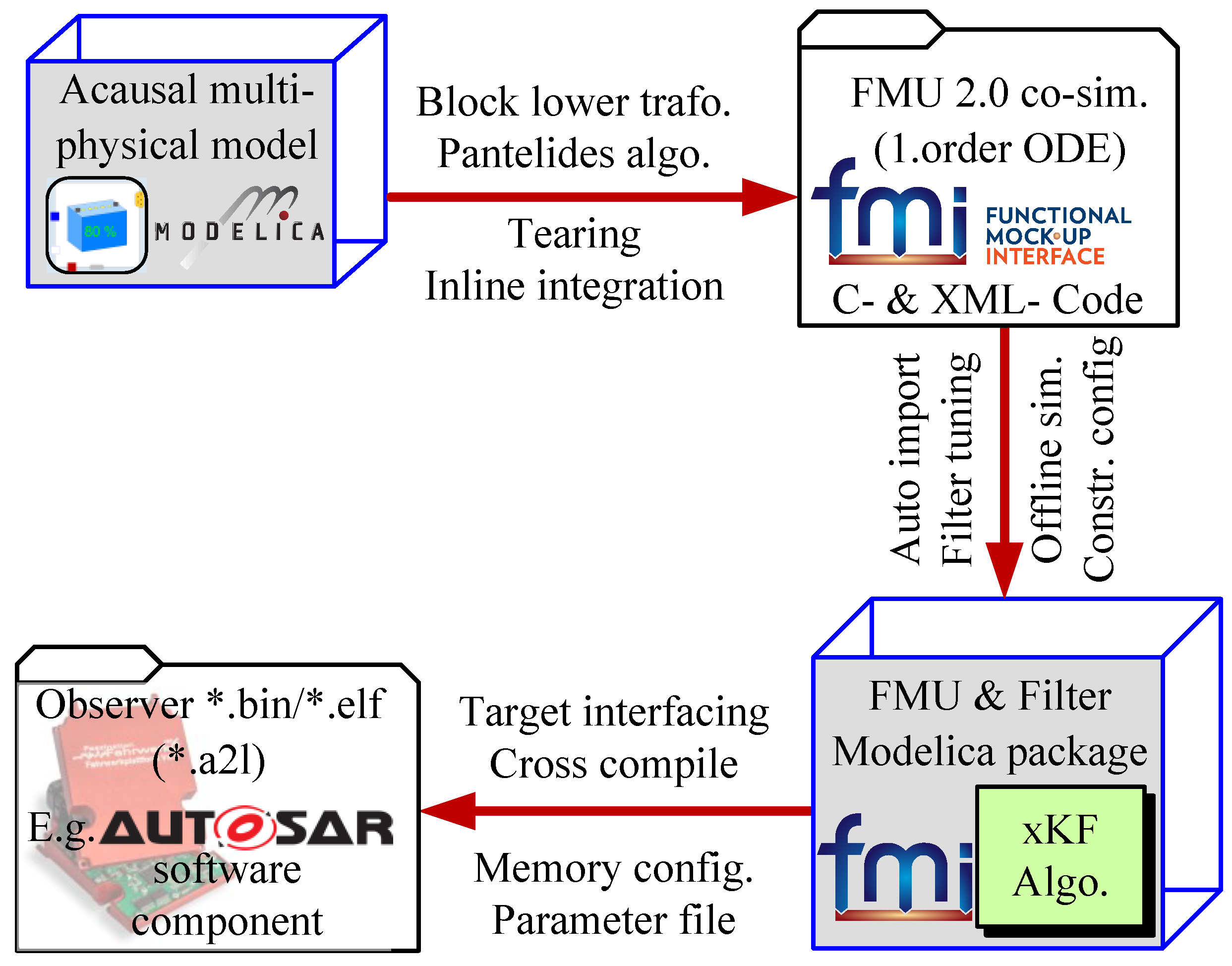
- Representation of a nonlinear acausal prediction model in an object oriented multi-physical modeling language (Modelica).
- Automated, well proven and efficient equation sorting and discretization in a standardized format;
- Direct integration in a library containing different types of nonlinear Kalman filter algorithms.
- Formulation of nonlinear state constraints in the same way as the prediction model.
- Proposal of a simplified approach for handling nonlinear state constraints.
- Automated code generation for a cross-platform embedded target.
- A continuous-time Modelica semi-physical cell model with state dependent characteristic mapping correlation has been automatically symbolically manipulated and discretized via Dymola and imported into the model based observer framework via the extended FMU 2.0 co-simulation interface.
- The cell prediction model parameters and characteristics were derived from real world test bench experiments matching the cell type used in ROMO for the high voltage system.
- An SR-UKF observer extended with a computional reliable method for state constraint handling has been designed and validated with experimental data from cell test bench investigations.
6. Outlook
Funding
Conflicts of Interest
Abbreviations
| Formula symbol | Unit | Description |
| State of charge | ||
| Cell hysteresis voltage | ||
| MESC model cell capacity correction factor | ||
| Cell nominal capacity | ||
| Coulombic cell efficiency | ||
| Transient cell hysteresis voltage | ||
| Cell polarization voltage depend from 𝑙,𝑇 |
| Nomenclature | Explanation |
| Bold lower case letter variable is a vector | |
| Bold upper case letter variable is a matrix | |
| Matrix notation | |
| Denotes the machine precision according to IEEE 754-2008 |
| Abbreviation | Explanation |
| AUTOSAR | Automotive open system architecture |
| BMS | Battery management system |
| CAN | Controller area network—vehicle bus standard |
| DLR | German Aerospace Center |
| DLR SR | Insititute of System Dynamics and Control at DLR |
| Dymola | Modelica simulator from Dassault Systèmes |
| EMPHYSIS | Embedded systems with physical models in the production code software – ITEA 3 project |
| EKF | Extended Kalman filter |
| ESC | Enhanced self-correcting (model) |
| FIT | Normalized root mean square error criteria |
| FMI | Functional mockup interface |
| FMU | Functional mockup unit |
| FTP-75 | (Environmental Protection Agency) Federal Test Procedure (drivecycle) |
| LAPACK | Linear Algebra PACKage–software library for numerical linear algebra |
| MATLAB | MATrix LABoratory–numerical computing software from MathWorks Inc. |
| MESC | Modified enhanced self-correcting (model) |
| MHE | Moving horizon estimation/estimator |
| Modelica | Object oriented modeling language for multiphysical systems [1] |
| MOPS | Multi-Objective Parameter Synthesis–DLR optimization software |
| MODRIO | Model Driven Physical Systems Operation – ITEA 3 project |
| NG | Nonlinear gradient (descent search) |
| NMPC | Nonlinear model predictive control |
| OCV | Open circuit voltage |
| PM | Perfect measurement |
| QP | Quadratic program |
| ROboMObil | see ROMO |
| ROMO | short for ROboMObil—DLR’s robotic electric vehicle |
| RTE | Run time environment |
| RTI | Real-time iteration |
| RTOS | Real-time operation system |
| SOC | |
| SPT | Sigma point transformation |
| SQP | Sequential quadratic program |
| SR | Square-root |
| SR-EKF | Square-root extended Kalman filter |
| SR-UKF | Square-root unscented Kalman filter |
| UD-EKF | UD-decomposition based extended Kalman filter |
| UKF | Unscented Kalman filter |
| URNDDR | Unscented recursive nonlinear dynamic data reconciliation |
| XML | Extensible markup langua |
| Modelica | Object oriented modeling language for multiphysical systems [1] |
| MOPS | Multi-Objective Parameter Synthesis – DLR optimization software |
| NG | Nonlinear gradient (descent search) |
| NMPC | Nonlinear model predictive control |
| OCV | Open circuit voltage |
| PM | Perfect measurement |
| QP | Quadratic program |
| ROboMObil | see ROMO |
| ROMO | short for ROboMObil – DLR’s robotic electric vehicle |
| RTE | Run time environment |
| RTI | Real-time iteration |
| RTOS | Real-time operation system |
| SOC | |
| SPT | Sigma point transformation |
| SQP | Sequential quadratic program |
| SR | Square-root |
| SR-EKF | Square-root extended Kalman filter |
| SR-UKF | Square-root unscented Kalman filter |
| UD-EKF | UD-decomposition based extended Kalman filter |
| UKF | Unscented Kalman filter |
| URNDDR | Unscented recursive nonlinear dynamic data reconciliation |
| XML | Extensible markup langua |
Appendix A. Cell Data Li-Tec HEI40
| Characteristica | Value | Explanatory notes |
| Nominal voltage | ||
| Discharging end-voltage | ||
| proprietary from Li-Tec Battery GmbH–see German patent DE102009040562 | ||
| ceramic separator – Evonic Separion© | ||
| Anode material | Graphite | Evonic Litarion© |
| Cathode material | Evonic Litarion© |
References
- Brembeck, J.; Ho, L.M.; Schaub, A.; Satzger, C.; Tobolar, J.; Bals, J.; Hirzinger, G. ROMO-The Robotic Electric Vehicle. In Proceeding of the 22nd IAVSD International Symposium on Dynamics of Vehicle on Roads and Tracks, Manchester Metropolitan University, 15 August 2011. [Google Scholar]
- Brembeck, J. Model Based Energy Management and State Estimation for the Robotic Electric Vehicle ROboMObil. Doctoral Dissertation, Technical University of Munich, Munich, Germany, 2018. [Google Scholar]
- Modelica Association. Modelica. Available online: http://www.modelica.org (accessed on 15 September 2019).
- Blochwitz, T.; Otter, M.; Akesson, J.; Arnold, M.; Clauß, C.; Elmqvist, H.; Friedrich, M.; Junghanns, A.; Mauss, J.; Neumerkel, D.; et al. Functional Mockup Interface 2.0: The Standard for Tool independent Exchange of Simulation Models. In Proceedings of the 9th International Modelica Conference, Munich, Germany, 3–5 September 2012; pp. 173–184. [Google Scholar]
- Modelica Association. Functional Mock-up Interface forModel Exchange and Co-Simulation. Specification document; Modelica. 2014. [Google Scholar]
- WIKIPEDIDA. Functional Mock-up Interface. Available online: https://en.wikipedia.org/wiki/Functional_Mock-up_Interface (accessed on 15 September 2019).
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches, 1st ed.; Wiley & Sons: Cleveland, OH, USA, 2006. [Google Scholar]
- Brembeck, J. Nonlinear Constrained Moving Horizon Estimation Applied to Vehicle Position Estimation. Sensors 2019, 19, 2276. [Google Scholar] [CrossRef] [PubMed]
- Brembeck, J.; Pfeiffer, A.; Fleps-Dezasse, M.; Otter, M.; Wernersson, K.; Elmqvist, H. Nonlinear State Estimation with an Extended FMI 2.0 Co-Simulation Interface. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014; pp. 53–62. [Google Scholar]
- Brembeck, J.; Wielgos, S. A real time capable battery model for electric mobility applications using optimal estimation methods. In Proceedings of the 8th International Modelica Conference, Dresden, Germany, 20–22 March 2011; pp. 398–405. [Google Scholar]
- Brembeck, J.; Otter, M.; Zimmer, D. Nonlinear Observers based on the Functional Mockup Interface with Applications to Electric Vehicles. In Proceedings of the 8th International Modelica Conference, Dresden, Germany, 20–22 March 2011; pp. 474–483. [Google Scholar]
- Grewal, M.S.; Andrews, A.P. Kalman filtering: theory and practice using MATLAB, 4th ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Haykin, S. Kalman Filtering and Neural Networks, 1st ed.; Wiley-Interscience: New York, NY, USA, 2001. [Google Scholar]
- Hartikainen, J.; Solin, A.; Särkkä, S. Optimal filtering with Kalman filters and smoothers - A Manual for Matlab toolbox EKF/UKF. Available online: http://www.lce.hut.fi/research/mm/ekfukf/ (accessed on 22 April 2017).
- Houska, B.; Ferreau, H.J.; Diehl, M. ACADO toolkit-An open-source framework for automatic control and dynamic optimization. Optim. Control Appl. Methods 2010, 32, 298–312. [Google Scholar] [CrossRef]
- Bonvini, M.; Wetter, M.; Sohn, M.D. An FMI-based Framework for State and Parameter Estimation. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014; pp. 647–656. [Google Scholar]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Access 2018, 6, 1832–1843. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; He, H.; Zhou, X.; Pecht, M.G. A Double-Scale, Particle-Filtering, Energy State Prediction Algorithm for Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2018, 65, 1526–1538. [Google Scholar] [CrossRef]
- Jokic, I.; Zecevic, Z.; Krstajic, B. State-of-charge estimation of lithium-ion batteries using extended Kalman filter and unscented Kalman filter. In Proceedings of the 2018 23rd International Scientific-Professional Conference on Information Technology (IT), Zabljak, Montenegro, 19–24 Febulary 2018; pp. 1–4. [Google Scholar]
- Tian, Y.; Li, D.; Tian, J.; Xia, B. An optimal nonlinear observer for state-of-charge estimation of lithium-ion batteries. In Proceedings of the 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017; pp. 37–41. [Google Scholar]
- Perez, H.E.; Hu, X.; Dey, S.; Moura, S.J. Optimal Charging of Li-Ion Batteries with Coupled Electro-Thermal-Aging Dynamics. IEEE Trans. Veh. Technol. 2017, 66, 7761–7770. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The Co-estimation of State of Charge, State of Health, and State of Function for Lithium-Ion Batteries in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Huang, C.; Wang, Z.; Zhao, Z.; Wang, L.; Lai, C.S.; Wang, D. Robustness Evaluation of Extended and Unscented Kalman Filter for Battery State of Charge Estimation. IEEE Access 2018, 6, 27617–27628. [Google Scholar] [CrossRef]
- Liu, Z.; Sun, G.; Bu, S.; Han, J.; Tang, X.; Pecht, M. Particle Learning Framework for Estimating the Remaining Useful Life of Lithium-Ion Batteries. IEEE Trans. Instrum. Meas. 2017, 66, 280–293. [Google Scholar] [CrossRef]
- Panchal, S.; Mcgrory, J.; Kong, J.; Fraser, R.; Fowler, M.; Dincer, I.; Agelin-Chaab, M. Cycling degradation testing and analysis of a LiFePO 4 battery at actual conditions. Int. J. Energy Res. 2017, 41, 2565–2575. [Google Scholar] [CrossRef]
- Panchal, S.; Rashid, M.; Long, F.; Mathew, M.; Fraser, R.; Fowler, M. Degradation Testing and Modeling of 200 Ah LiFePO 4 Battery. In Proceedings of the WCX World Congress Experience, Detroit, MI, USA, 10–12 April 2018. [Google Scholar]
- Plett, G.L. High-performance battery-pack power estimation using a dynamic cell model. IEEE Trans. Veh. Technol. 2004, 53, 1586–1593. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1–3. J. Power Sources 2004, 134, 252–292. [Google Scholar] [CrossRef]
- Van der Merwe, R. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models. Ph.D. Thesis, Oregon Health & Science University, Hillsboro Oregon, USA, April 2004. [Google Scholar]
- Pantelides, C.C. The Consistent Initialization of Differential-Algebraic Systems. SIAM J. Sci. and Stat. Comput. 1988, 9, 213–231. [Google Scholar] [CrossRef]
- Otter, M.; Elmqvist, H. Transformation of Differential Algebraic Array Equations to Index One Form. In Proceedings of the 12th International Modelica Conference, Prague, Czech Republic, 15–17 May2017; pp. 565–579. [Google Scholar]
- Anderson, E.; Bai, Z.; Bischof, C.; Blackford, L.S.; Demmel, J.; Dongarra, J.J.; Croz, J.D.; Hammarling, S.; Greenbaum, A.; McKenney, A.; et al. LAPACK Users’ Guide, 3rd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1999. [Google Scholar]
- Simon, D. Kalman filtering with state constraints: a survey of linear and nonlinear algorithms. Iet Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Bazaraa, M.S.; Sherali, H.D.; Shetty, C.M. Nonlinear Programming, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Kandepu, R.; Imsland, L.; Foss, B.A. Constrained state estimation using the Unscented Kalman Filter. In Proceedings of the 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008; pp. 1453–1458. [Google Scholar]
- Schneider, P. Sigma-Punkt Kalman-Filter mit Ungleichungsnebenbedingungen. Ph.D. Thesis, Logos Verlag Berlin GmbH, Saarbrücken, Germany, 2011. [Google Scholar]
- Curtis, F.E.; Que, X. A quasi-Newton algorithm for nonconvex, nonsmooth optimization with global convergence guarantees. Math. Program. Comput. 2015, 7, 399–428. [Google Scholar] [CrossRef]
- Brent, R.P. Algorithms for Minimization Without Derivatives; Dover Publications: Mineola, New York, NY, USA, 2013; pp. 58–59. [Google Scholar]
- Zhang, F.; Rehman, M.M.U.; Wang, H.; Levron, Y.; Plett, G.; Zane, R.; Maksimović, D. State-of-charge estimation based on microcontroller-implemented sigma-point Kalman filter in a modular cell balancing system for Lithium-Ion battery packs. In Proceedings of the 16th Workshop on Control and Modeling for Power Electronics (COMPEL), Vancouver, BC, Canada, 12–15 July 2015; pp. 1–7. [Google Scholar]
- Graaf, R. Simulation hybrider Antriebskonzepte mit Kurzzeitspeicher für Kraftfahrzeuge. Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 2010. [Google Scholar]
- Pfeiffer, A. Optimization Library for Interactive Multi-Criteria Optimization Tasks. In Proceedings of the 9th International Modelica Conference, Munich, Germany, 3–5 September 2012; pp. 669–679. [Google Scholar]
- Neudorfer, J.; Armugham, S.S.; Peter, M.; Mandipalli, N.; Ramachandran, K.; Bertsch, C.; Corral, I. FMI for Physics-Based Models on AUTOSAR Platforms. In Proceedings of the Symposium on International Automotive Technology (SIAT), Pune, India, 18–21 January 2017. [Google Scholar]
- Yang, J.; Xia, B.; Shang, Y.; Huang, W.; Mi, C.C. Adaptive State-of-Charge Estimation Based on a Split Battery Model for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2017, 66, 10889–10898. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Evaluations | |
|---|---|
| Integration between two sample points: | |
| Derivative evaluation: | |
| Output evaluation: | |
| State Jacobian matrix (optional): | |
| Output Jacobian matrix (optional): | |
| Method | Approach Description |
|---|---|
| Nonlinear soft constraints | Nonlinear soft constraints by means of perfect measurements [33] are shown in the application example of a battery state estimator in Chapter 4. |
| Nonlinear optimization based estimation projection | Project the states on the constrained surface by solving the restrictive optimization problem it can be solved by means of a nonlinear interior point solver or a sequential quadratic program (SQP) [34]. |
| Sigma point projection | This is a special approach for UKF algorithms. The sigma points are projected on the borders of the constrained region and with these projected points the covariance update is calculated [35]. In [36] and [2] additionally the sigma point weights are scaled to improve the constrained covariance confidence. Similar methods are the two-step UKF and the unscented recursive nonlinear dynamic data reconciliation (URNDDR) which performs a MHE with a horizon size of one to the posteriori sigma points [33]. |
| Nonlinear moving horizon estimation | A nonlinear moving horizon estimator with a nonlinear gradient descent optimization which can handle equality and inequality constraints as well as delayed measurements is formulated [2]. Besides this, various other formulations, like the URNDDR, the constrained UKF [2] or the constrained real-time approach using the ACADO toolbox [15] can be found as examples for nonlinear moving horizon estimation. |
| SOC Reference Compared to | FIT |
|---|---|
| SOC SR-UKF | |
| SOC SR-EKF | |
| SOC perf. measurement | |
| SOC simulation |
| Algorithm | |
|---|---|
| SR-UKF unconstrained | |
| SR-EKF unconstrained | |
| SR-UKF w. simplified Newton descent search | |
| SR-UKF w. sigma point projection constraints |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brembeck, J. A Physical Model-Based Observer Framework for Nonlinear Constrained State Estimation Applied to Battery State Estimation. Sensors 2019, 19, 4402. https://doi.org/10.3390/s19204402
Brembeck J. A Physical Model-Based Observer Framework for Nonlinear Constrained State Estimation Applied to Battery State Estimation. Sensors. 2019; 19(20):4402. https://doi.org/10.3390/s19204402
Chicago/Turabian StyleBrembeck, Jonathan. 2019. "A Physical Model-Based Observer Framework for Nonlinear Constrained State Estimation Applied to Battery State Estimation" Sensors 19, no. 20: 4402. https://doi.org/10.3390/s19204402
APA StyleBrembeck, J. (2019). A Physical Model-Based Observer Framework for Nonlinear Constrained State Estimation Applied to Battery State Estimation. Sensors, 19(20), 4402. https://doi.org/10.3390/s19204402