A 4K-Input High-Speed Winner-Take-All (WTA) Circuit with Single-Winner Selection for Change-Driven Vision Sensors



Abstract
1. Introduction
2. State of the Art
3. Winner-Take-All Scheme Description
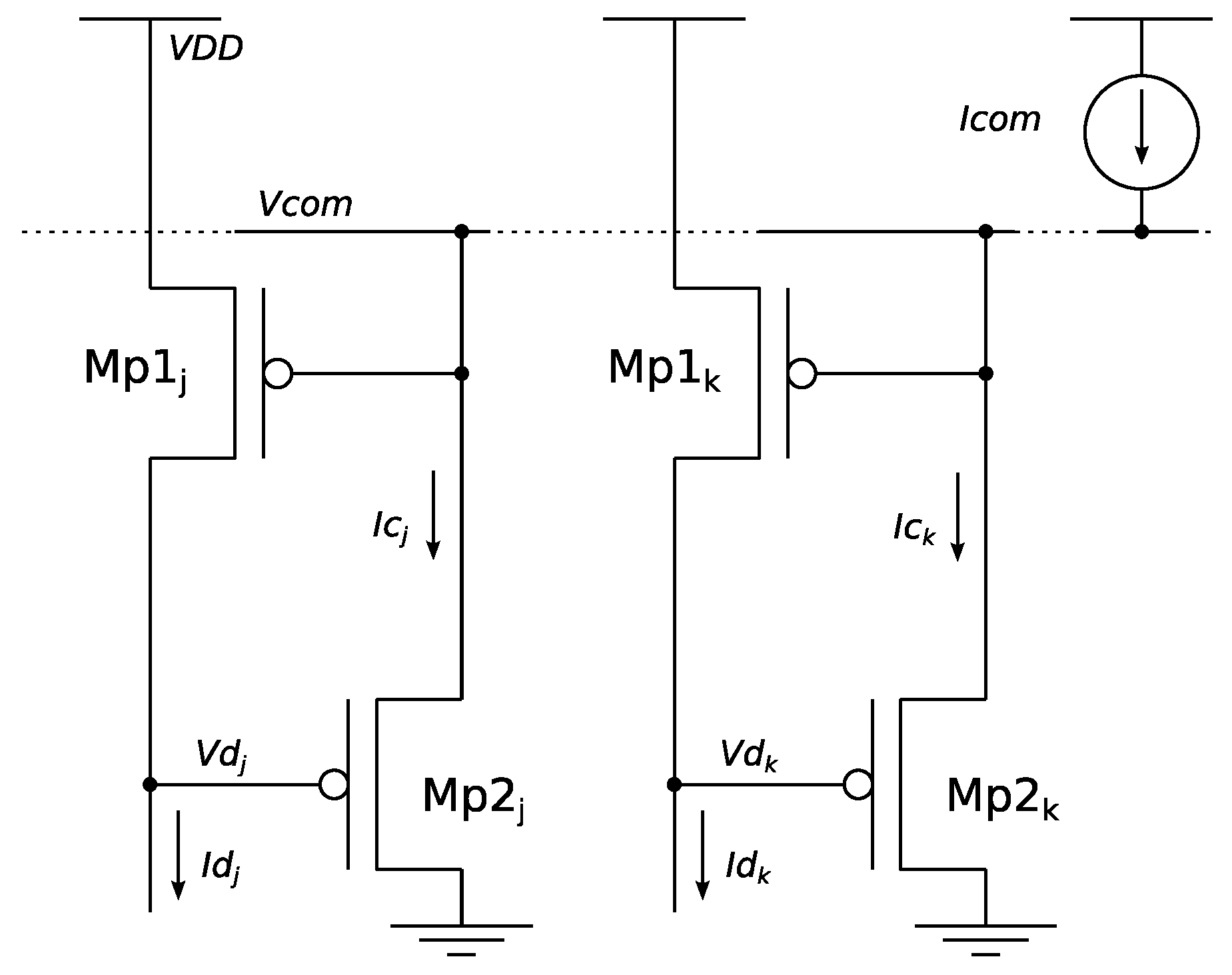
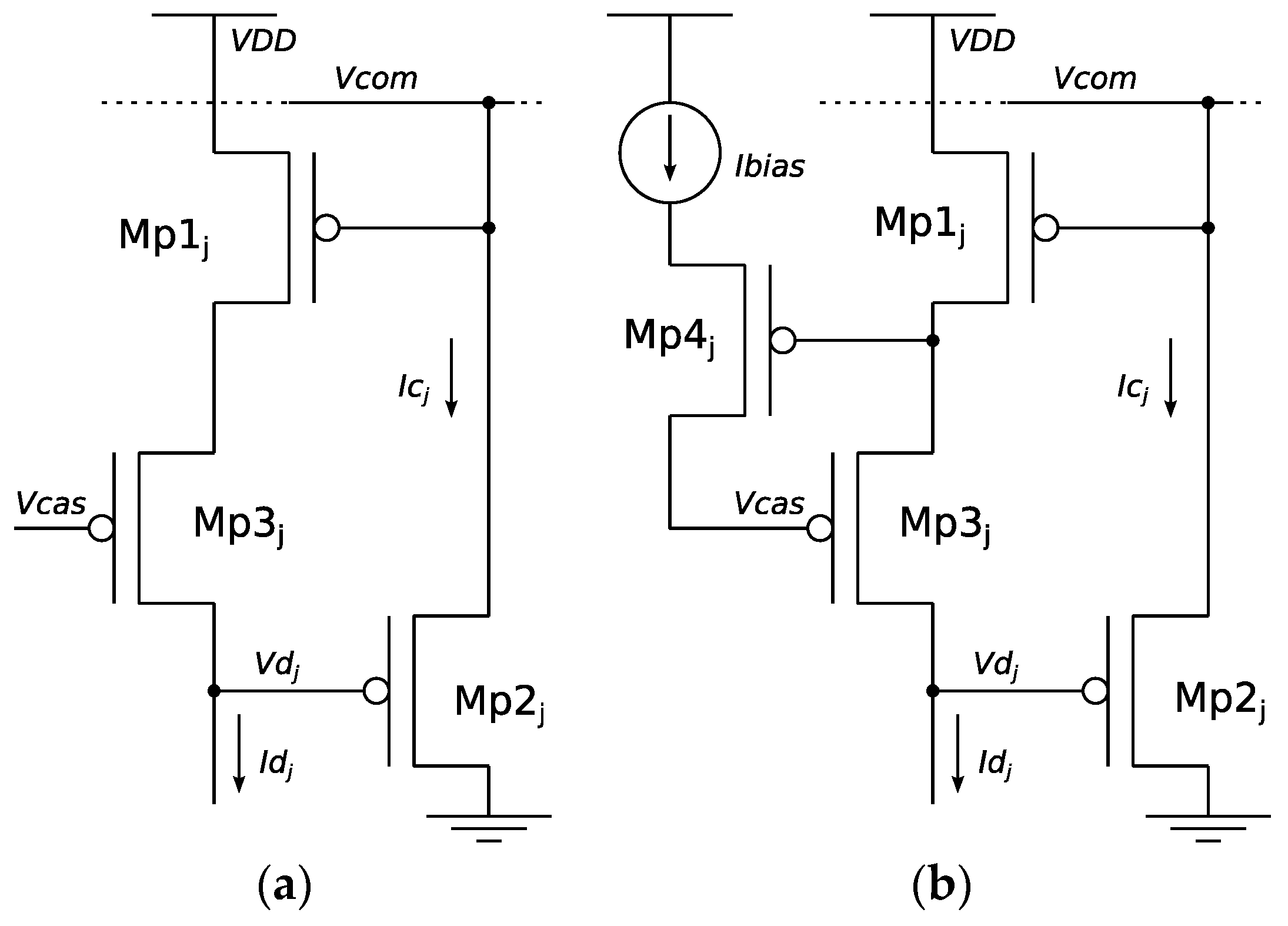
3.1. Winner-Take-All Analog Circuit
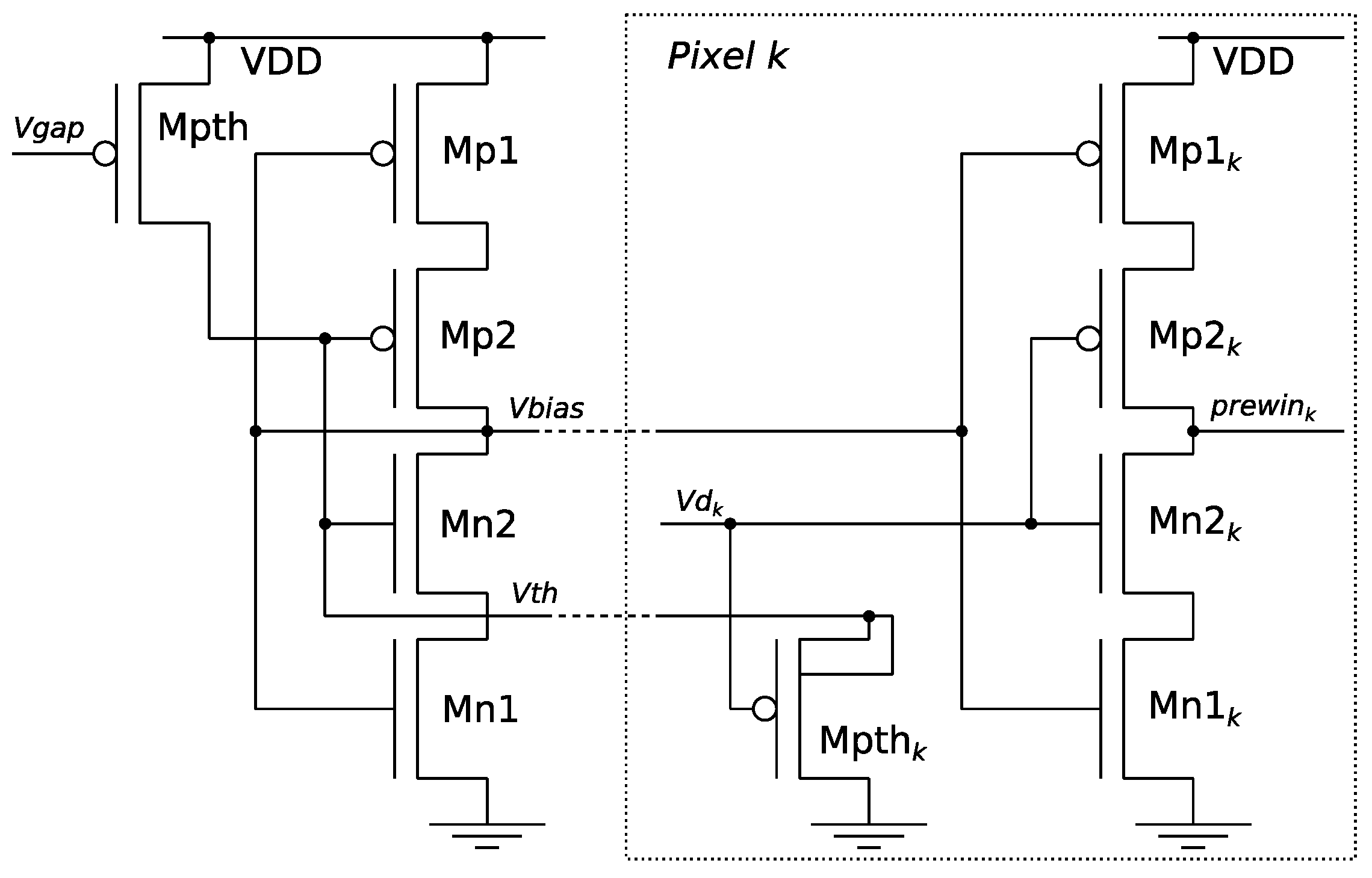
3.2. Winner Identification
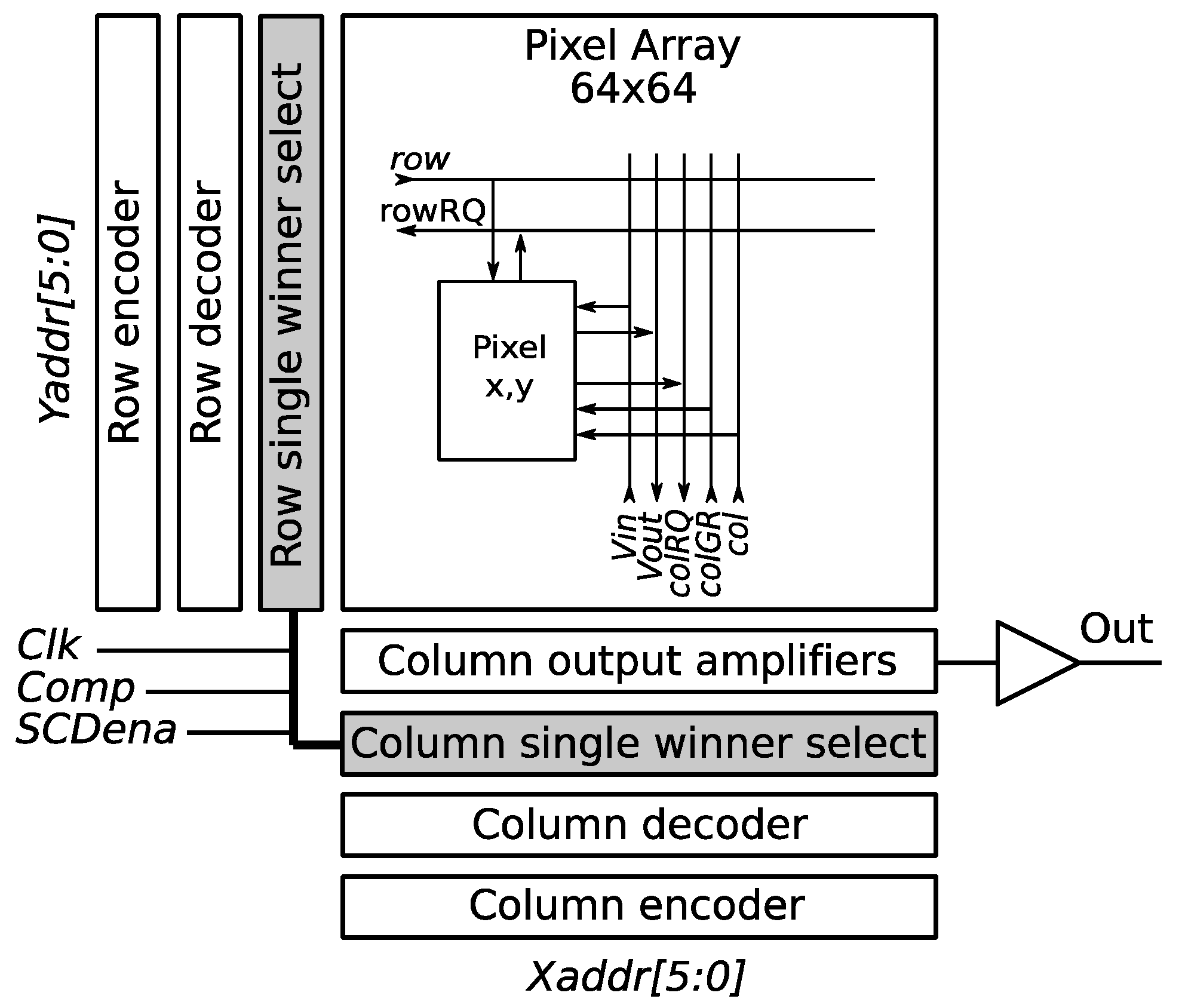
3.3. Digital Single-Winner Selection
4. Simulation Results
5. Experimental Results
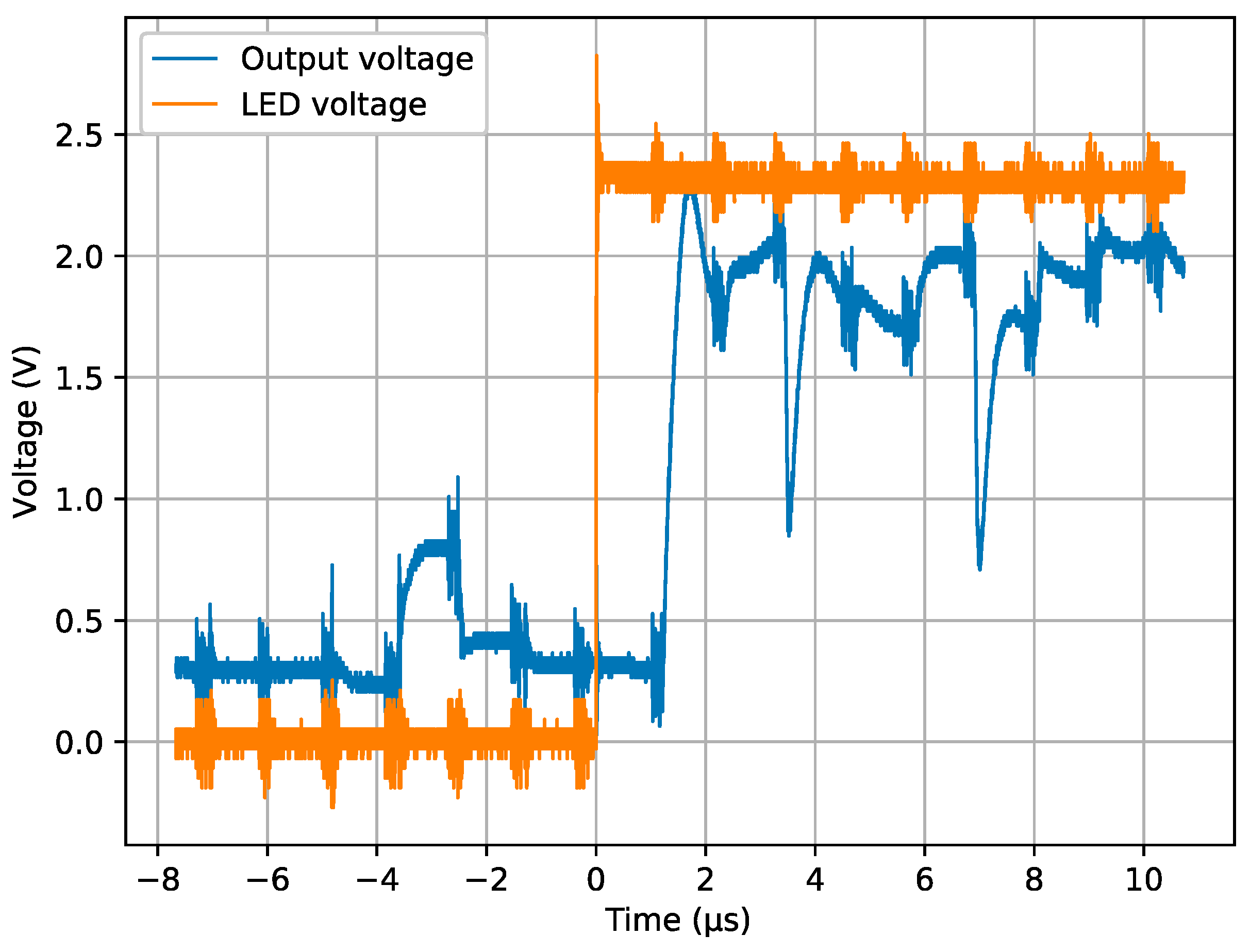
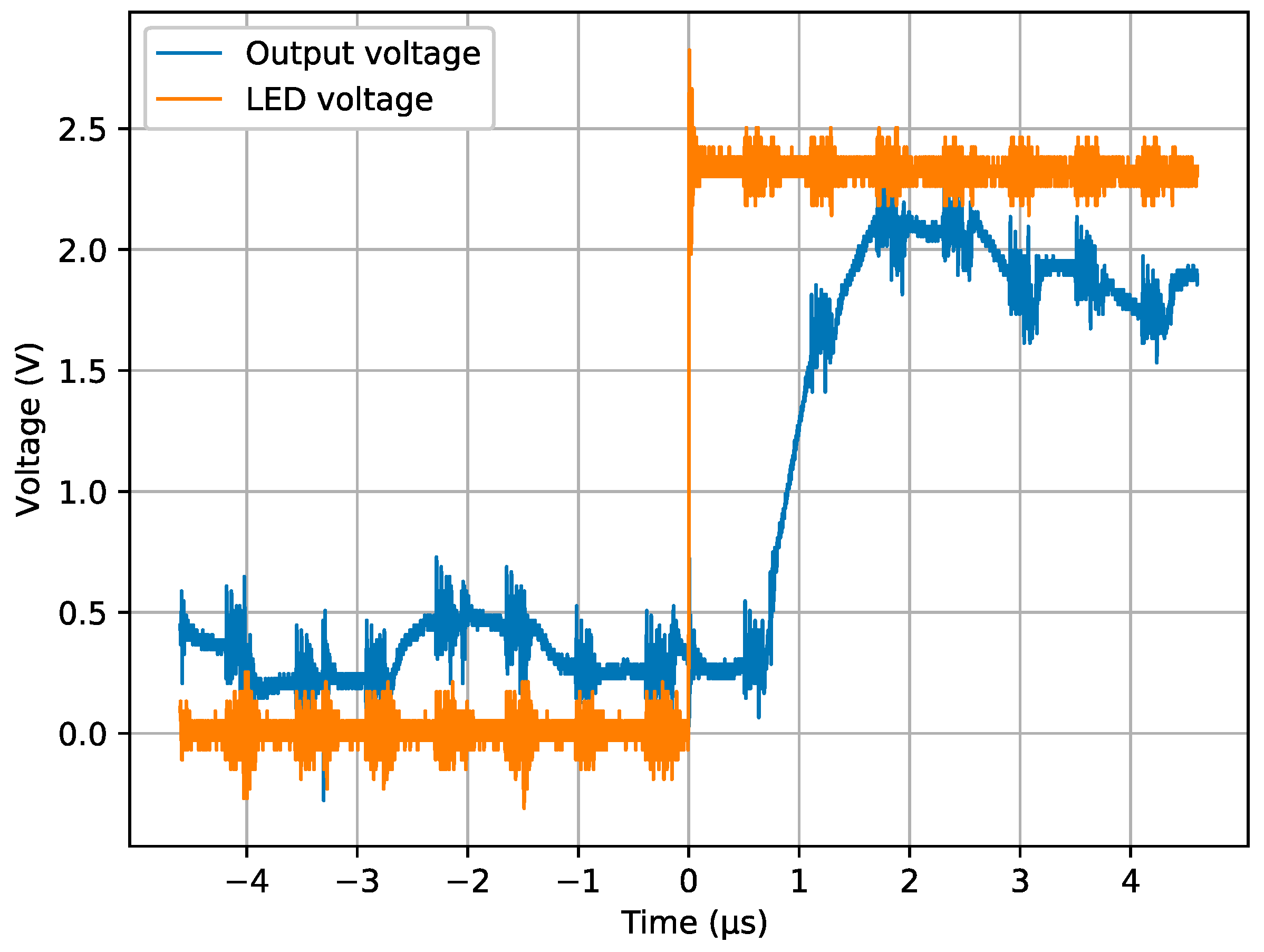
5.1. Event Reaction Time
- Time between pixel reads (pixel rate). This time fixes the minimum time resolution of the system and, therefore, of the signaling of any event. If illumination output is needed, then at least 1 µs between pixels is necessary; the sensor may work at lower times if no illumination level is required.
- WTA delay. This is the time discussed in the WTA simulation section that is required by the WTA to provide a single winner. It has also been seen in the simulations that it is below 1 µs, even in the worst-case scenario.
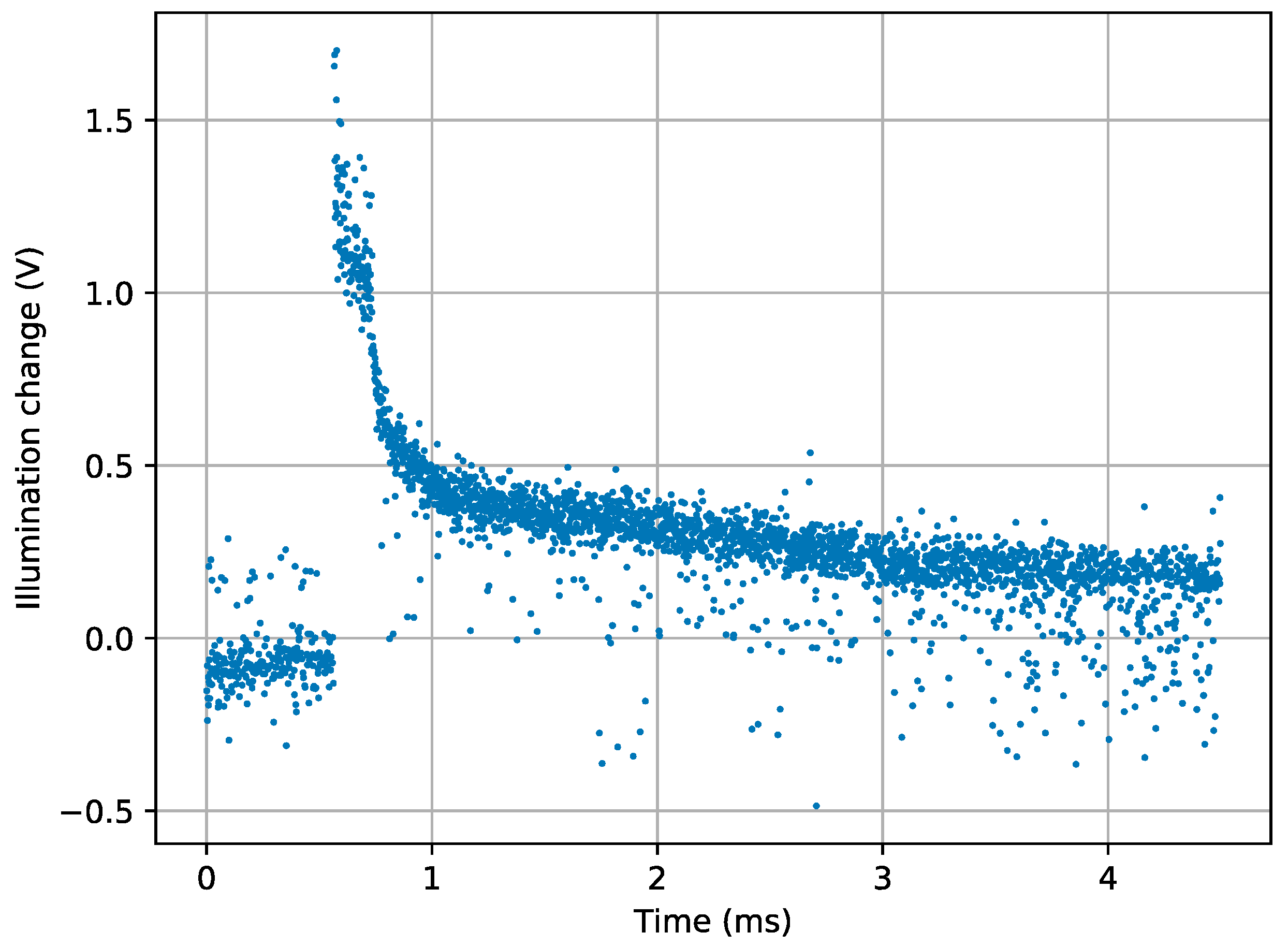
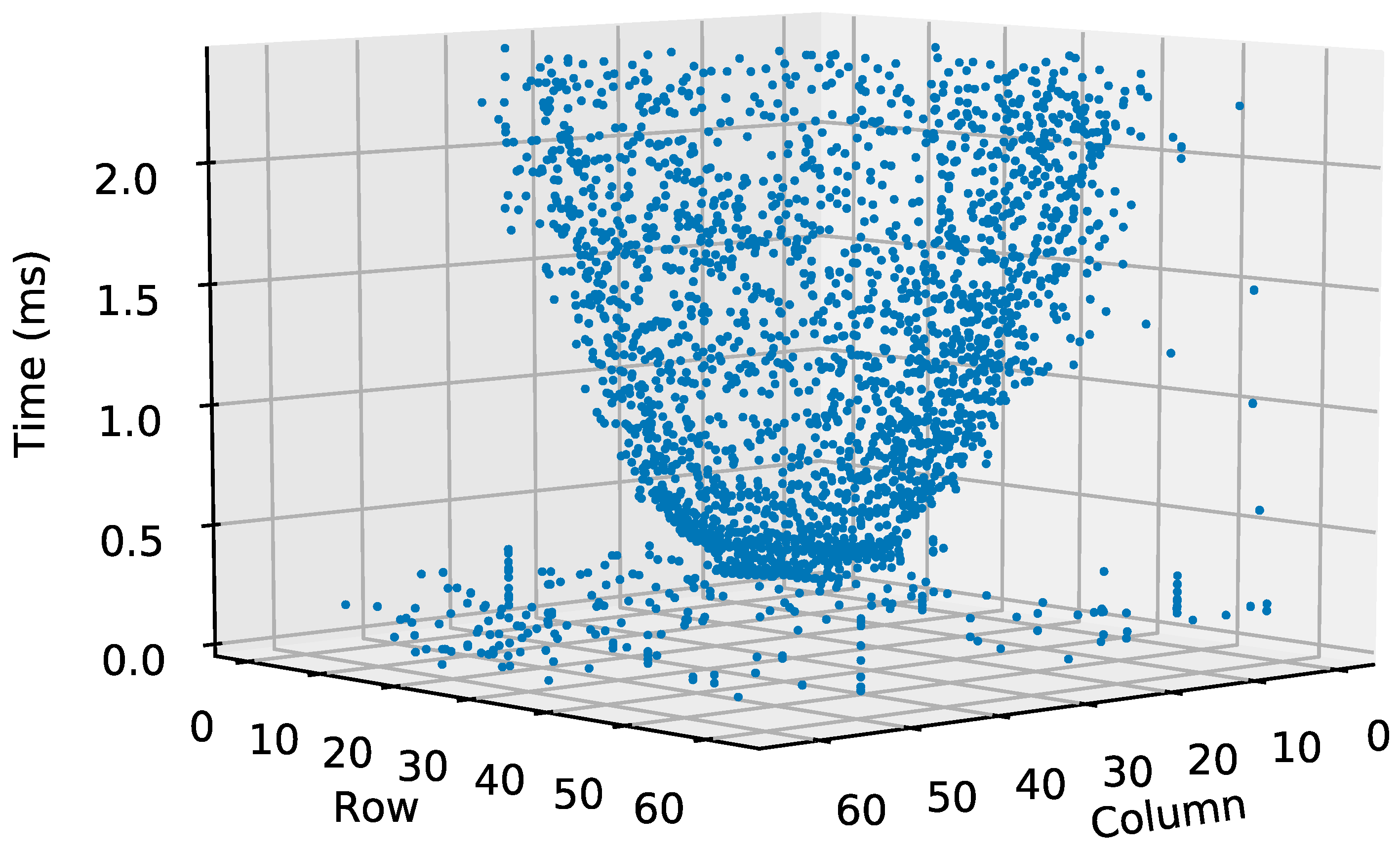
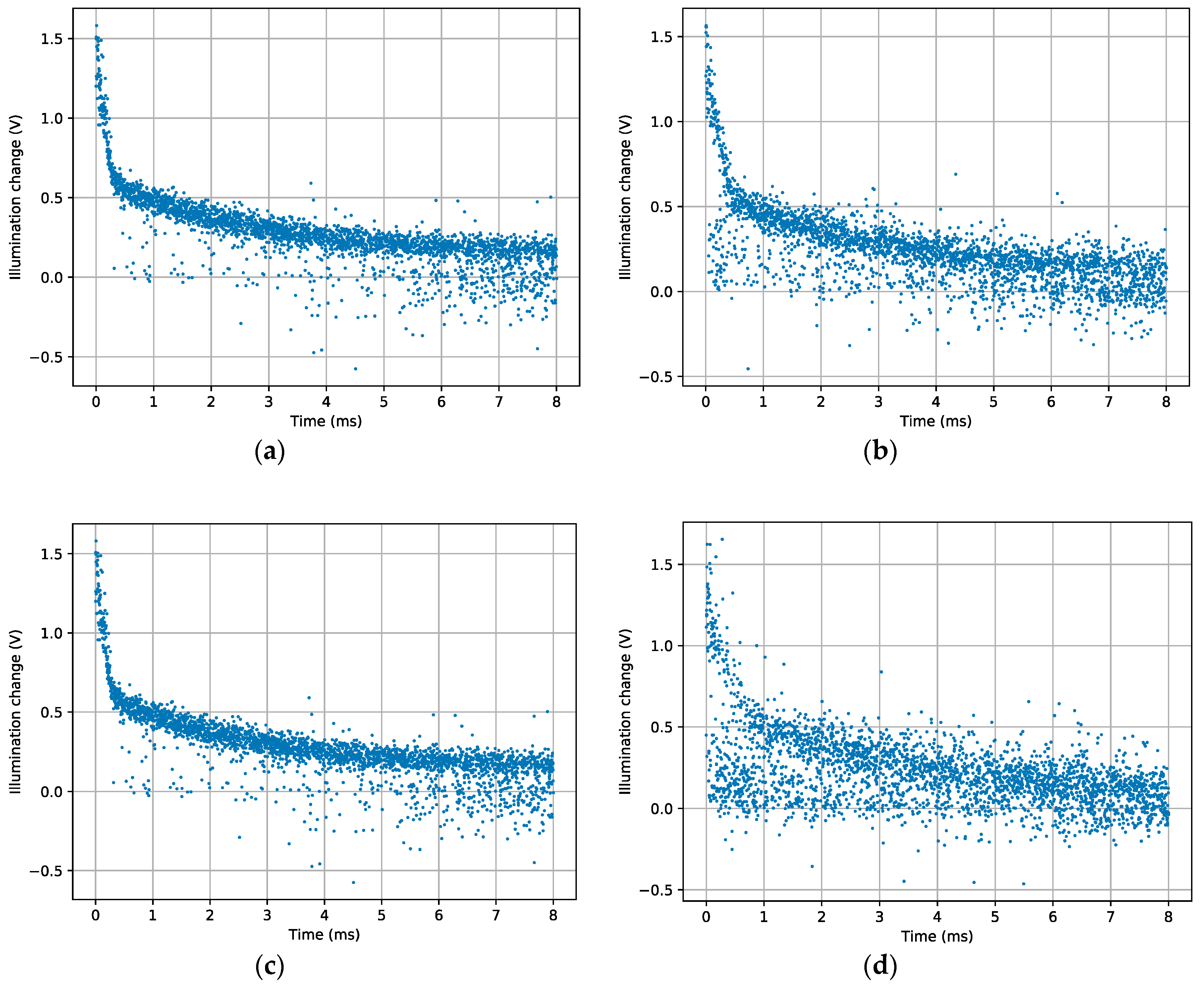
- Light-transduction delay. This is the time required by the photodiode and amplification circuits to convert illumination to an electrical measurable magnitude. The cell employed in this sensor continuously translates light into voltage, and its delay depends on the illumination intensity. The use of light integration-based cells, which is a common strategy for frame-based cameras, has been discarded for its large delay, which is not good for event-based sensors. The delay of continuously reading based sensors ranges from microseconds to milliseconds, depending on light intensity. Delays in the order of microseconds can be obtained with light intensities in the order of direct sunlight, or direct light coming from an LED located a few centimeters from the sensor.
5.2. Event Retention Time
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AER | Address Event Representation |
| CMOS | Complementary Metal Oxide Semiconductor |
| fps | Frames per second |
| kfps | Kiloframes per second |
| LED | Light-Emitting Diode |
| n.p. | Not provided |
| SCD | Selective Change-Driven |
| VLSI | Very Large Scale of Integration |
| WTA | Winner-Take-All |
References
- Maass, W. On the Computational Power of Winner-Take-All. Neural Comput. 2000, 12, 2519–2535. [Google Scholar] [CrossRef] [PubMed]
- Douglas, R. Neuromorphic Analogue VLSI. Annu. Rev. Neurosci. 1995, 18, 255–281. [Google Scholar] [CrossRef] [PubMed]
- Wu, N. Neuromorphic vision chips. Sci. China Inf. Sci. 2018, 61, 060421. [Google Scholar] [CrossRef]
- Pardo, F.; Zuccarello, P.; Boluda, J.A.; Vegara, F. Advantages of Selective Change-Driven Vision for Resource-Limited Systems. IEEE Trans. Circuits Syst. Video Technol. 2011, 21, 1415–1423. [Google Scholar] [CrossRef]
- Lazzaro, J.; Ryckebusch, S.; Mahowald, M.A.; Mead, C.A. Winner-Take-Aall Networks of O(N) Complexity. Adv. Neural Inf. Process. Syst. 1989, 1, 703–711. [Google Scholar]
- Choi, J.; Sheu, B.J. A high-precision VLSI winner-take-all circuit for self-organizing neural networks. IEEE J. Solid-State Circuits 1993, 28, 576–584. [Google Scholar] [CrossRef]
- Sekerkiran, B.; Cilingiroglu, U. Precision improvement in current-mode winner-take-all circuits using gain-boosted regulated-cascode CMOS stages. In Proceedings of the 1998 IEEE International Joint Conference on Neural Networks Proceedings, IEEE World Congress on Computational Intelligence (Cat. No.98CH36227), Anchorage, AK, USA, 4–9 May 1998; IEEE: Wasington, DC, USA, 1998; Volume 1, pp. 553–556. [Google Scholar]
- Fish, A.; Milrud, V.; Yadid-Pecht, O. High-speed and high-precision current winner-take-all circuit. IEEE Trans. Circuits Syst. II Express Briefs 2005, 52, 131–135. [Google Scholar] [CrossRef]
- Hung, Y.-C.; Liu, B.-D.; Tsai, C.-Y. 1-V bulk-driven CMOS analog programmable winner-takes-all circuit. Analog Integr. Circuits Signal Process. 2006, 49, 53–61. [Google Scholar] [CrossRef]
- Zuccarello, P.; Pardo, F.; de la Plaza, A.; Boluda, J.A. 32×32 winner-take-all matrix with single winner selection. Electron. Lett. 2010, 46, 333–335. [Google Scholar] [CrossRef]
- Prommee, P.; Chattrakun, K. CMOS WTA maximum and minimum circuits with their applications to analog switch and rectifiers. Microelectron. J. 2011, 42, 52–62. [Google Scholar] [CrossRef]
- Molinar-Solis, J.E.; García-Lozano, R.; Morales-Ramirez, A.; Espinoza-Ortega, O.; Rocha-Perez, M.; Diaz-Sanchez, A.; Ramirez-Angulo, J.; Vazquez-Leal, H. Low Voltage Lazzaro’s WTA with enhanced loop gain. IEICE Electron. Express 2012, 9, 648–653. [Google Scholar] [CrossRef]
- Moro-Frias, D.; Ventura-Arizmendi, C.; Sanz-Pascual, M.-T.; de la Cruz-Blas, C.-A. Current-Mode Winner-Take-All Circuit with Improved Dynamic Response. Circuits Syst. Signal Process. 2015, 34, 625–639. [Google Scholar] [CrossRef]
- Kulej, T.; Khateb, F. Sub 0.5-V bulk-driven winner take all circuit based on a new voltage follower. Analog Integr. Circuits Signal Process. 2017, 90, 687–691. [Google Scholar] [CrossRef]
- Pardo, F.; Boluda, J.A.; Vegara, F. Selective Change Driven Vision Sensor With Continuous-Time Logarithmic Photoreceptor and Winner-Take-All Circuit for Pixel Selection. IEEE J. Solid-State Circuits 2015, 50, 786–798. [Google Scholar] [CrossRef]
- Boluda, J.; Pardo, F.; Vegara, F.; Boluda, J.A.; Pardo, F.; Vegara, F. A Selective Change Driven System for High-Speed Motion Analysis. Sensors 2016, 16, 1875. [Google Scholar] [CrossRef] [PubMed]
- Sekerkiran, B.; Cilingiroglu, U. Improving the resolution of Lazzaro winner-take-all circuit. In Proceedings of the International Conference on Neural Networks (ICNN’97), Houston, TX, USA, 12 June 1997; IEEE: Wasington, DC, USA, 1997; Volume 2, pp. 1005–1008. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CMOS Technology | Number of Inputs | Number of Transistors | Time Delay | Resolution | Reference |
|---|---|---|---|---|---|
| 2 μm (MOSIS) | 170 | 2n | >100 μs | 2% | [5] |
| 2 μm (MOSIS) | 200 | 10n | ~300 ns | ~50 mV | [6] |
| 0.8 μm (AMS) | 10 | 3n | n.p. | ~1 nA | [7] |
| 0.35 μm (TSMC) | 8 | 12n | ~15 ns | ~2 nA | [8] |
| 0.25 μm | 8 | 7n | ~50 μs | ~5 mV | [9] |
| 0.35 μm (AMS) | 1024 | 4n | ~2 μs | ~10 nA | [10] |
| 0.25 μm (TSMC) | 2 | 3n + 4 | n.p. | n.p. | [11] |
| 0.5 μm (ON SEMI) | 4 | 2n + 2 | ~1 μs | n.p. | [12] |
| 0.13 μm | 3 | 3n + 1 | ~50 ns | n.p. | [13] |
| 0.18 μm | 2 | 3n + 3 | >1 μs | n.p. | [14] |
| 0.18 μm (AMS) | 4096 | 3n + 1 | <1 μs | n.p. | This work. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pardo, F.; Reig, C.; Boluda, J.A.; Vegara, F. A 4K-Input High-Speed Winner-Take-All (WTA) Circuit with Single-Winner Selection for Change-Driven Vision Sensors. Sensors 2019, 19, 437. https://doi.org/10.3390/s19020437
Pardo F, Reig C, Boluda JA, Vegara F. A 4K-Input High-Speed Winner-Take-All (WTA) Circuit with Single-Winner Selection for Change-Driven Vision Sensors. Sensors. 2019; 19(2):437. https://doi.org/10.3390/s19020437
Chicago/Turabian StylePardo, Fernando, Càndid Reig, José A. Boluda, and Francisco Vegara. 2019. "A 4K-Input High-Speed Winner-Take-All (WTA) Circuit with Single-Winner Selection for Change-Driven Vision Sensors" Sensors 19, no. 2: 437. https://doi.org/10.3390/s19020437
APA StylePardo, F., Reig, C., Boluda, J. A., & Vegara, F. (2019). A 4K-Input High-Speed Winner-Take-All (WTA) Circuit with Single-Winner Selection for Change-Driven Vision Sensors. Sensors, 19(2), 437. https://doi.org/10.3390/s19020437