An Improved Adaptive Compensation H∞ Filtering Method for the SINS’ Transfer Alignment Under a Complex Dynamic Environment


Abstract
1. Introduction
2. Transfer Alignment Model
2.1. SINS Error Dynamics Model
2.2. Measurement Model
2.3. Sensor Error Compensation Model
3. H∞ Filtering Method
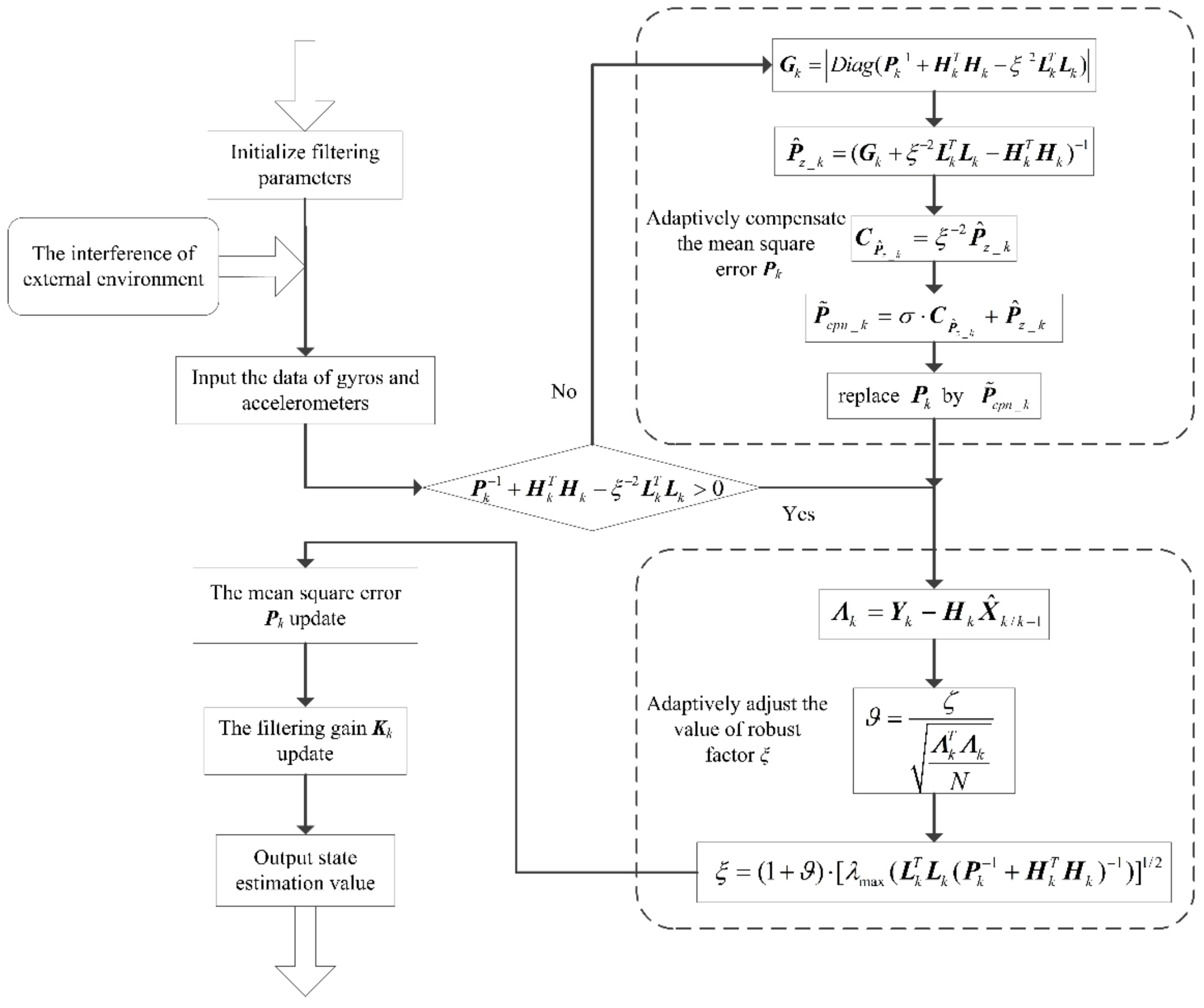
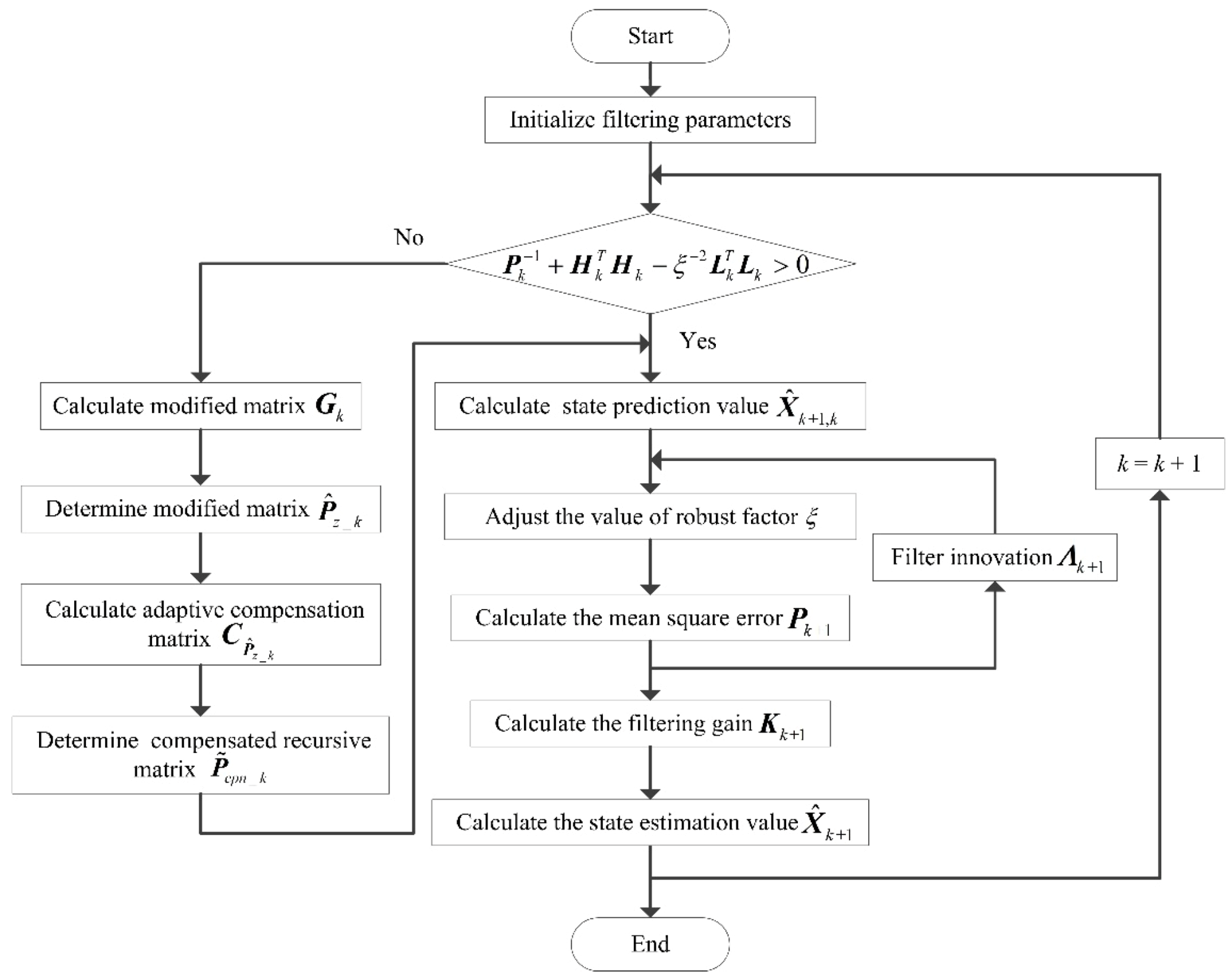
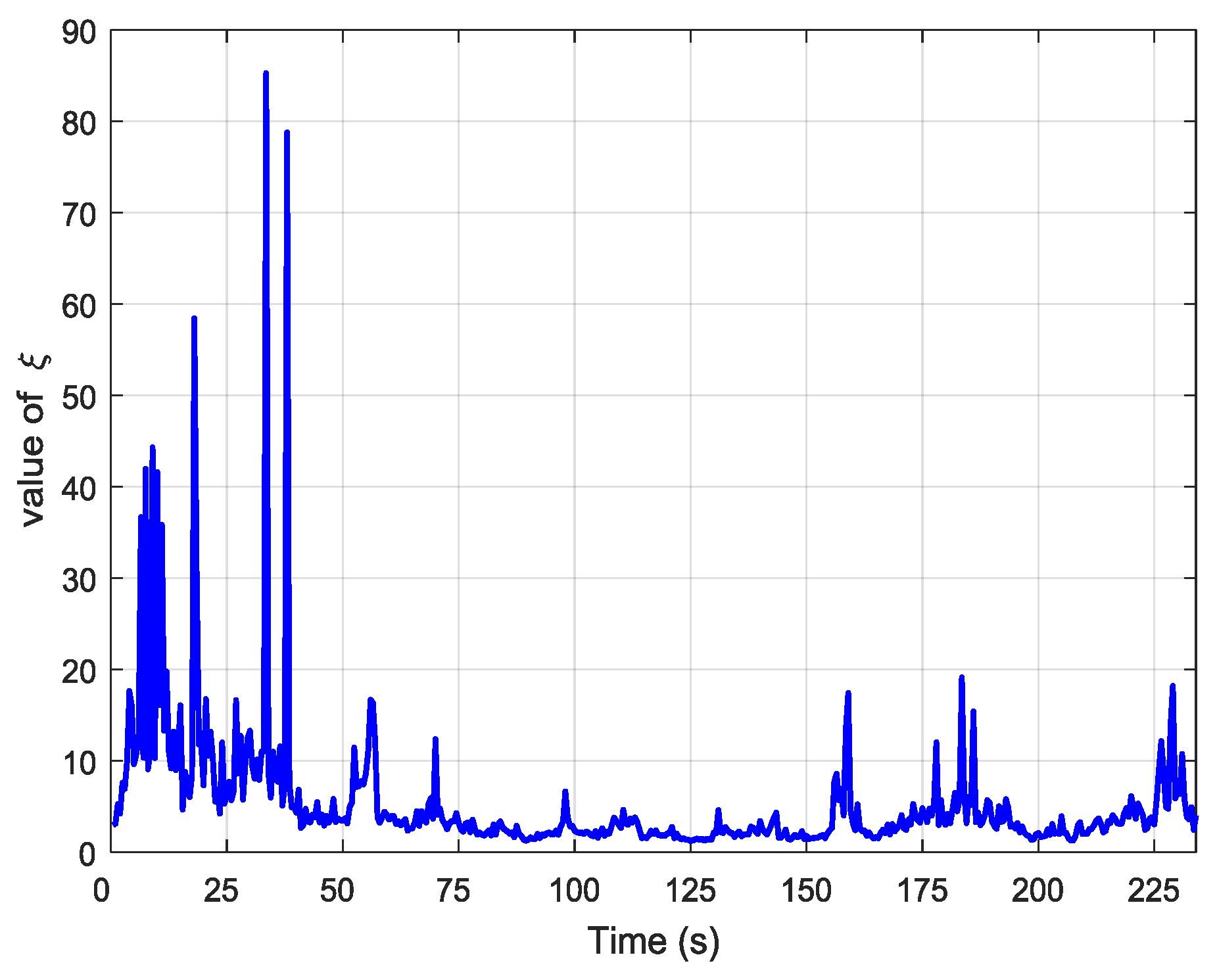
4. The Proposed Adaptive Compensation H∞ Filtering Method
5. Experimental Results and Discussion
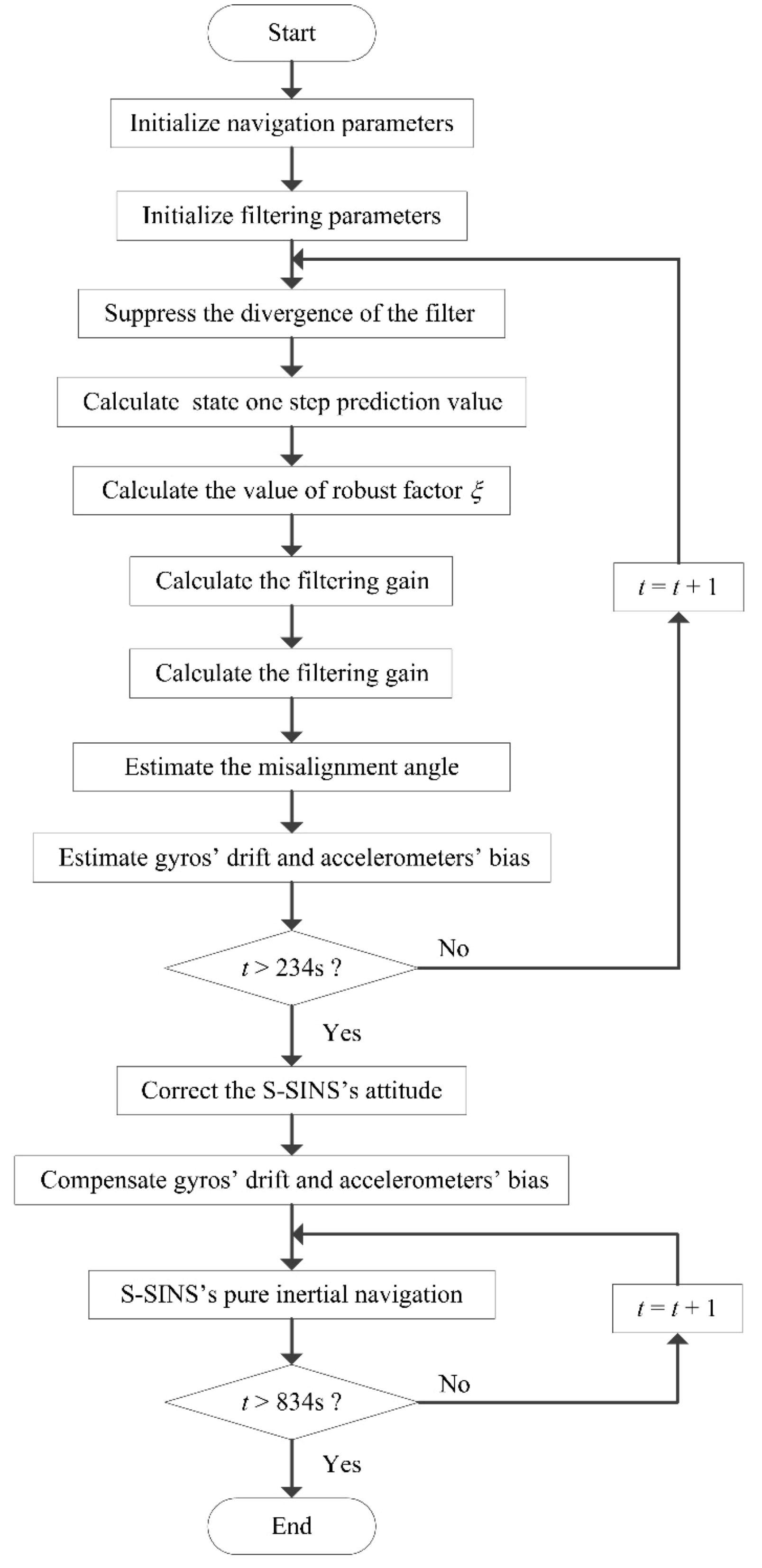
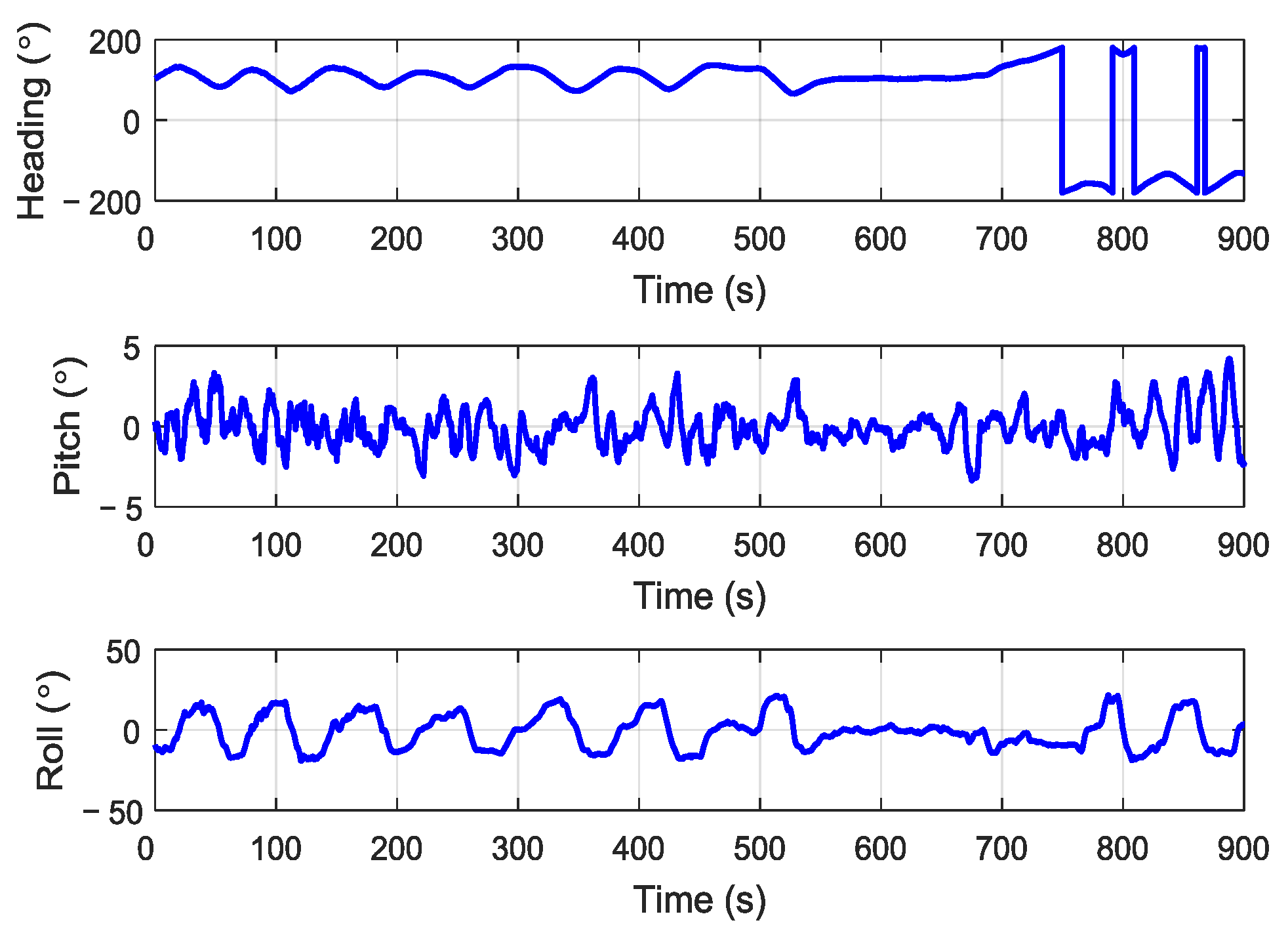
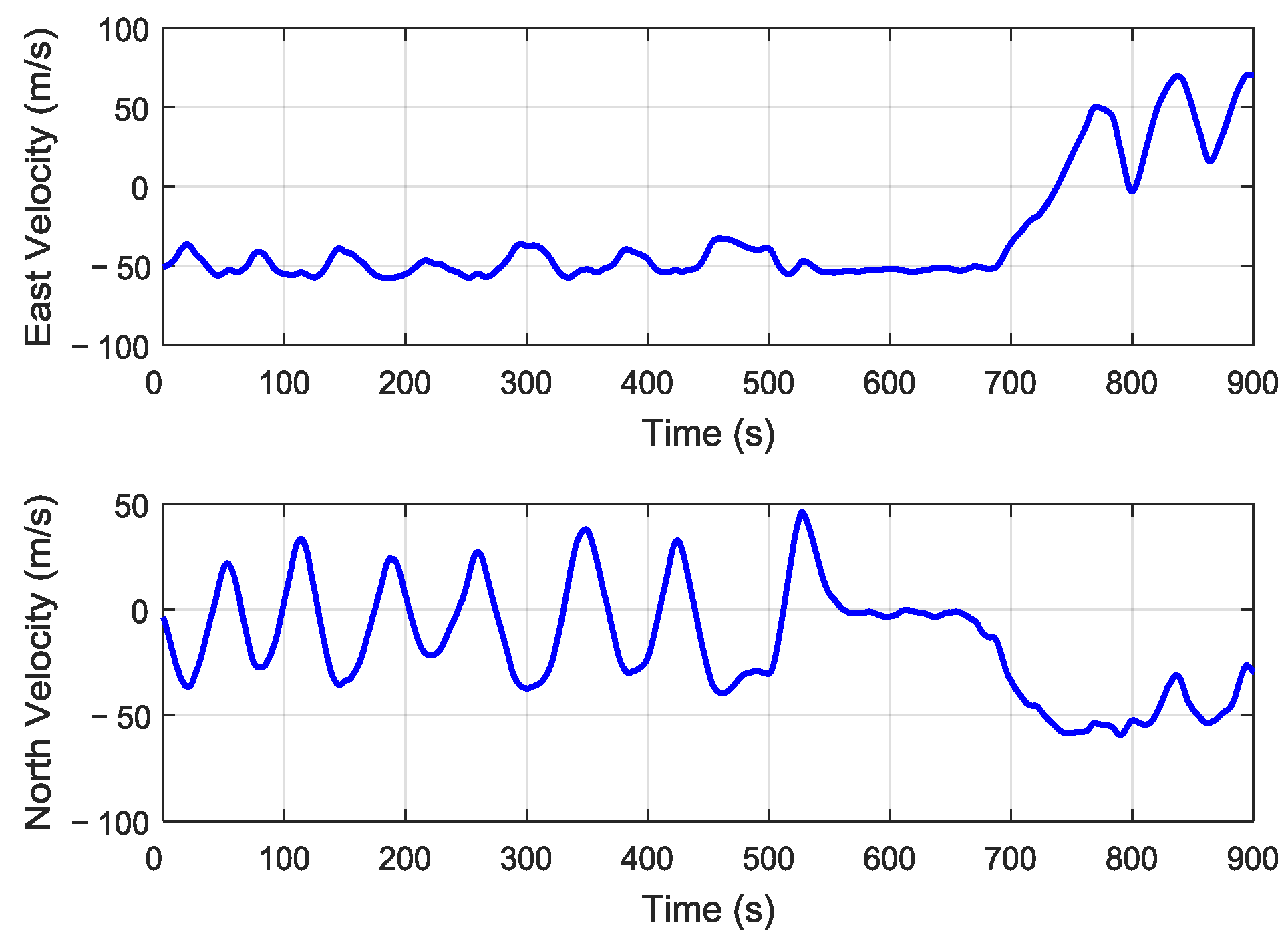
5.1. Experimental Settings
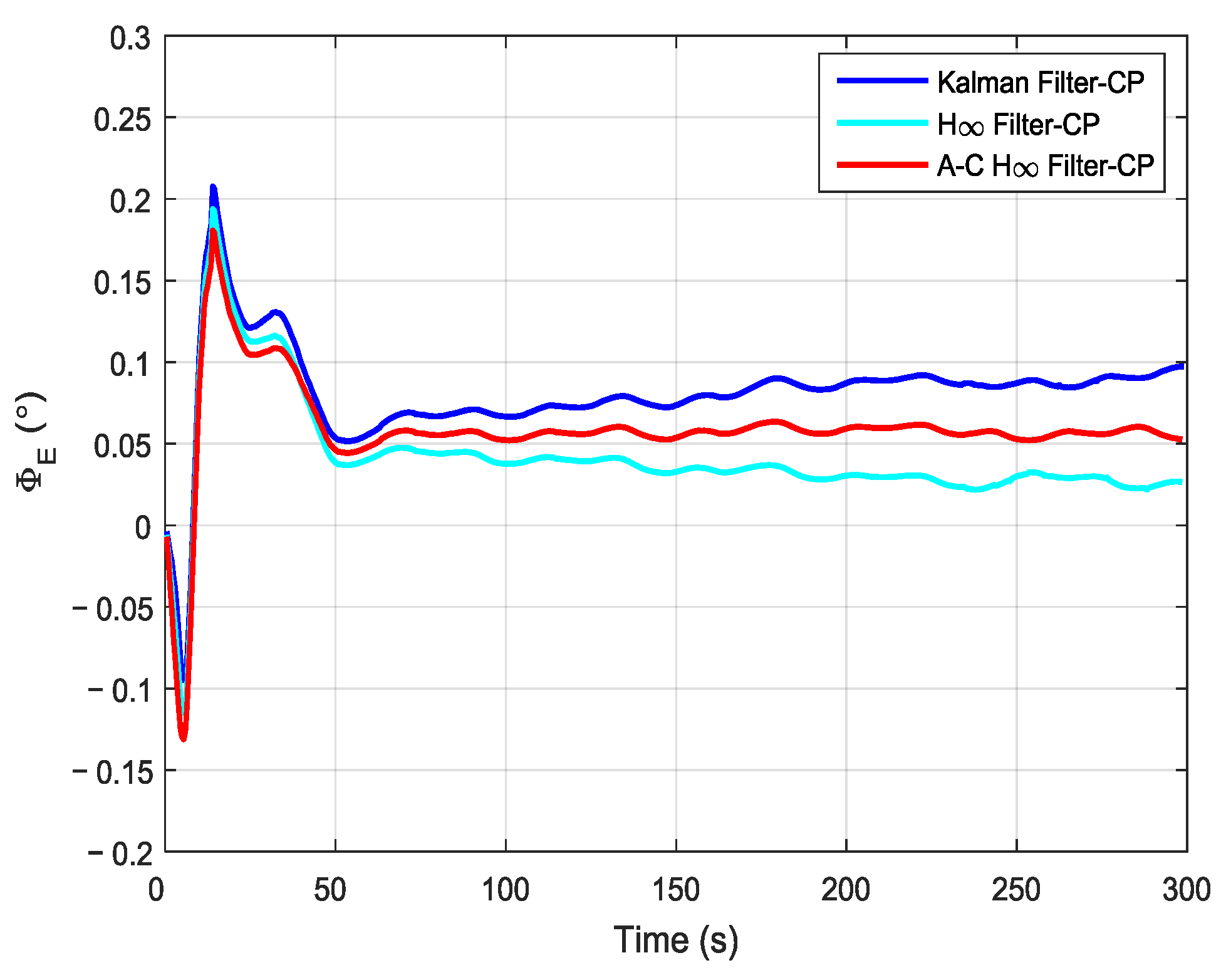
5.2. Experimental Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, G.L.; Wang, Y.Y.; Yang, S.J. Assessment approach for calculating transfer alignment accuracy of SINS on moving base. Measurement 2014, 52, 55–63. [Google Scholar] [CrossRef]
- Shortelle, K.J.; Graham, W.R.; Rabourn, C. F-16 flight tests of a rapid transfer alignment procedure. In Proceedings of the IEEE Position Location & Navigation Symposium, Palm Springs, CA, USA, 20–23 April 1996; pp. 379–386. [Google Scholar]
- Chen, Y.; Zhao, Y.; Li, Q.S. Mixed H2/H∞ filtering algorithm for transfer alignment. Syst. Eng. Electron. 2013, 35, 2390–2395. [Google Scholar]
- Li, W.L.; Wang, J.L.; Lu, L.Q.; Wu, W.Q. A Novel Scheme for DVL-Aided SINS In-Motion Alignment Using UKF Techniques. Sensors 2013, 13, 1046–1063. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Sun, F.; Zhang, Y.; Liu, H.P.; Min, H.B. Central Difference Particle Filter Applied to Transfer Alignment for SINS on Missiles. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 375–387. [Google Scholar] [CrossRef]
- Gong, X.L.; Fan, W.; Fang, J.C. An innovational transfer alignment method based on parameter identification UKF for airborne distributed POS. Measurement 2014, 58, 103–114. [Google Scholar] [CrossRef]
- Ding, G.Q.; Zhou, W.D.; Hao, Y.L.; Sun, F. The Impact of Arm-Lever Effect Error Based Large Initial Misalignment Transfer Alignment Technology Study. In Proceedings of the International Workshop on Intelligent Systems & Applications, Wuhan, China, 23–24 May 2009; pp. 1–6. [Google Scholar]
- Wu, W.; Chen, S.; Qin, S. Online Estimation of Ship Dynamic Flexure Model Parameters for Transfer Alignment. IEEE Trans. Control Syst. Technol. 2013, 21, 1666–1678. [Google Scholar] [CrossRef]
- Cao, Q.; Zhong, M.Y.; Guo, J. Non-linear estimation of the flexural lever arm for transfer alignment of airborne distributed position and orientation system. IET Radar Sonar Navig. 2017, 11, 41–51. [Google Scholar] [CrossRef]
- Cheng, J.H.; Wang, T.D.; Song, C.Y.; Yu, D.W. Modified adaptive filter algorithm for shipborne SINS transfer alignment. Syst. Eng. Electron. 2016, 38, 638–643. [Google Scholar]
- Guo, Z.W.; Miao, L.J.; Zhao, H.S.; Shen, J. Application of an Improved Gaussian-like Sum Particle Filter to Large Misalignment Transfer Alignment. Acta Aeronaut. Astronaut. Sin. 2013, 34, 164–172. [Google Scholar]
- Wagner, J.F.; Kasties, G. Applying the principle of integrated navigation systems to estimating the motion of large vehicles. Aerosp. Sci. Technol. 2004, 8, 155–166. [Google Scholar] [CrossRef]
- Baraniello, V.R.; Cicala, M.; Corraro, F. An extension of integrated navigation algorithms to estimate elastic motions of very flexible aircrafts. In Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010; pp. 1–14. [Google Scholar]
- Lian, J.; Feng, Z.; Shi, P. Robust H∞ filtering for a class of uncertain stochastic hybrid neutral systems with time-varying delay. Int. J. Adapt. Control Signal Process. 2013, 27, 462–477. [Google Scholar] [CrossRef]
- Shi, J.; Miao, L.J.; Ni, M.L. New robust filtering algorithm and its application to micro-electro-mechanical system-based inertial navigation system/global positioning system. Control Theory Appl. 2012, 29, 305–309. [Google Scholar]
- Chen, Y.; Zheng, W.X. Exponential H∞ filtering for stochastic Markovian jump systems with time delays. Int. J. Robust Nonlinear Control 2014, 24, 625–643. [Google Scholar] [CrossRef]
- Souza, C.E.D.; Shaked, U.; Fu, M.Y. Robust H∞ filtering for continuous time varying uncertain systems with deterministic input signals. IEEE Trans. Signal Process. 1995, 43, 709–719. [Google Scholar] [CrossRef]
- Matsuzaki, H. A Practical Form of Exponentially-Weighted H∞ Adaptive Filters. SICE J. Control Meas. Syst. 2014, 7, 219–226. [Google Scholar] [CrossRef]
- Yang, G.H.; Ye, D. Robust H∞ filtering for continuous time-varying uncertain systems with adaptive mechanism. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3040–3045. [Google Scholar]
- Lyu, W.W.; Cheng, X.H. A Novel Adaptive H∞ Filtering Method with Delay Compensation for the Transfer Alignment of Strapdown Inertial Navigation Systems. Sensors 2017, 17, 2753. [Google Scholar] [CrossRef] [PubMed]
- Sahoo, H.K.; Dash, P.K. Robust estimation of power quality disturbances using unscented H∞ filter. Int. J. Electr. Power Energy Syst. 2015, 73, 438–447. [Google Scholar] [CrossRef]
- Li, W.L.; Jia, Y.M. H-infinity filtering for a class of nonlinear discrete-time systems based on unscented transform. Signal Process. 2010, 90, 3301–3307. [Google Scholar] [CrossRef]
- Liu, X.G.; Hu, J.T.; Wang, H. Research on integrated navigation method based on adaptive H∞ filter. Chin. J. Sci. Instrum. 2014, 35, 1013–1021. [Google Scholar]
- Liu, J.; Wang, J.; Cai, B.G. Research on Fuzzy Adaptive H∞ Robust Filter for Integrated Navigation System. In Proceedings of the International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 912–916. [Google Scholar]
- Zhu, Y.; Liang, Y.; Yang, M.; Yang, F. Adaptive Compensation Robust H∞ Filter Applied to Integrated Navigation. Fire Control Command Control 2010, 35, 15–18. [Google Scholar]
- Gu, Z.; Shi, P.; Yue, D.; Ding, Z.T. Decentralized Adaptive Event-Triggered H∞ Filtering for a Class of Networked Nonlinear Interconnected Systems. IEEE Trans. Cybern. 2018, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.Y.; Shi, P.; Liu, F.; Teo, K.L.; Lim, C.C. Robust Filtering for Nonlinear Nonhomogeneous Markov Jump Systems by Fuzzy Approximation Approach. IEEE Trans. Cybern. 2017, 45, 1706–1716. [Google Scholar] [CrossRef] [PubMed]
- Outamazirt, F.; Li, F.; Yan, L.; Nemra, A. Autonomous Navigation System Using a Fuzzy Adaptive Nonlinear H∞ Filter. Sensors 2014, 14, 17600–17620. [Google Scholar] [CrossRef]
- Zhang, H.; Shi, Y.; Mehr, A.S. Robust weighted H∞ filtering for networked systems with intermittent measurements of multiple sensors. Int. J. Adapt. Control Signal Process. 2011, 25, 313–330. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M. Sparse-Grid Quadrature H∞ Filter for Discrete-Time Systems with Uncertain Noise Statistics. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1626–1636. [Google Scholar] [CrossRef]
- Han, S.L.; Wang, J.L. Quantization and Colored Noises Error Modeling for Inertial Sensors for GPS/INS Integration. IEEE Sens. J. 2011, 11, 1493–1503. [Google Scholar] [CrossRef]
- Zhai, D.; An, L.W.; Ye, D.; Zhang, Q.L. Adaptive Reliable H∞ Static Output Feedback Control Against Markovian Jumping Sensor Failures. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 631–644. [Google Scholar] [CrossRef]
- Wang, D.; Mu, C.X.; Liu, D.R.; Ma, H.W. On Mixed Data and Event Driven Design for Adaptive-Critic-Based Nonlinear H∞ Control. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 993–1005. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
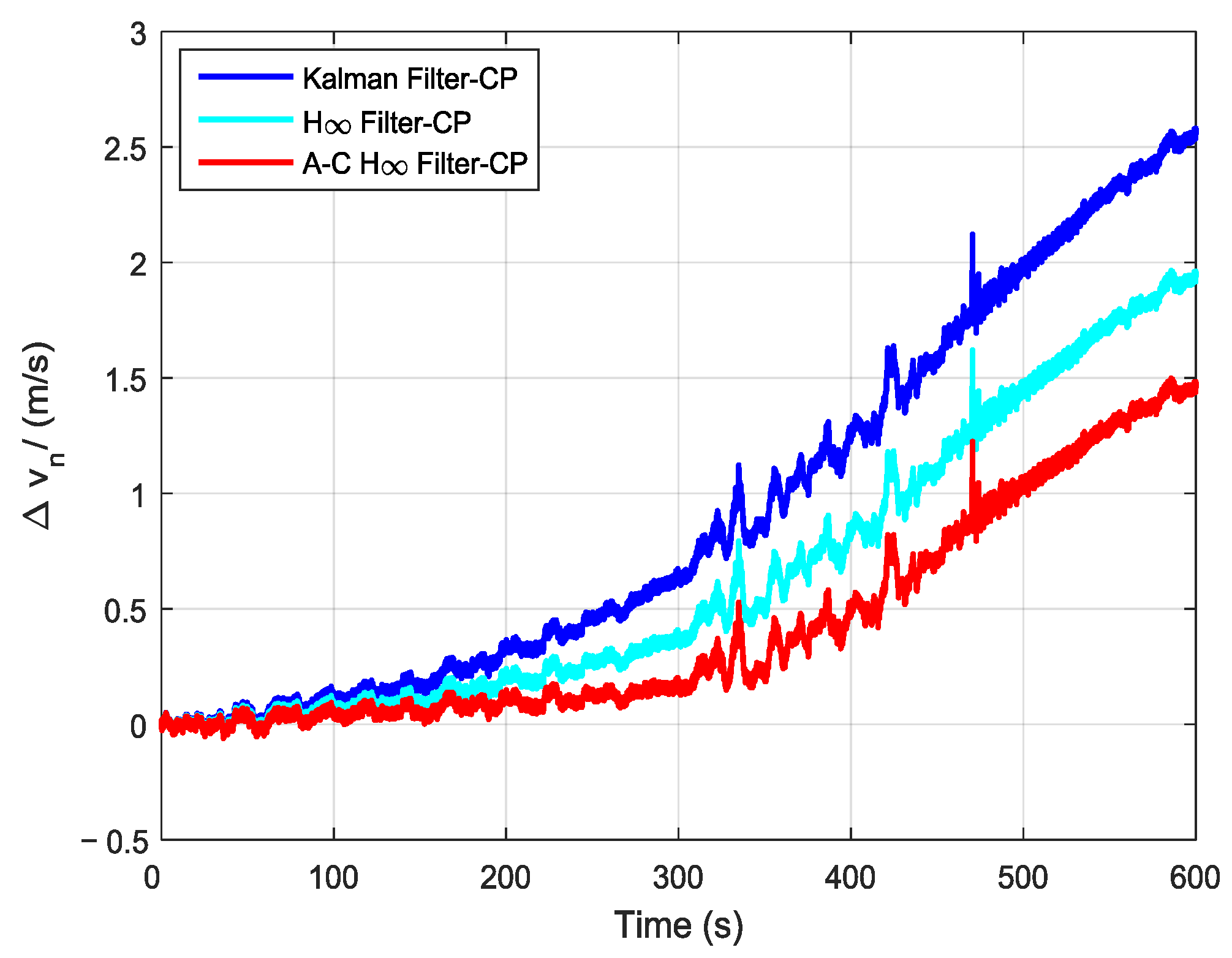
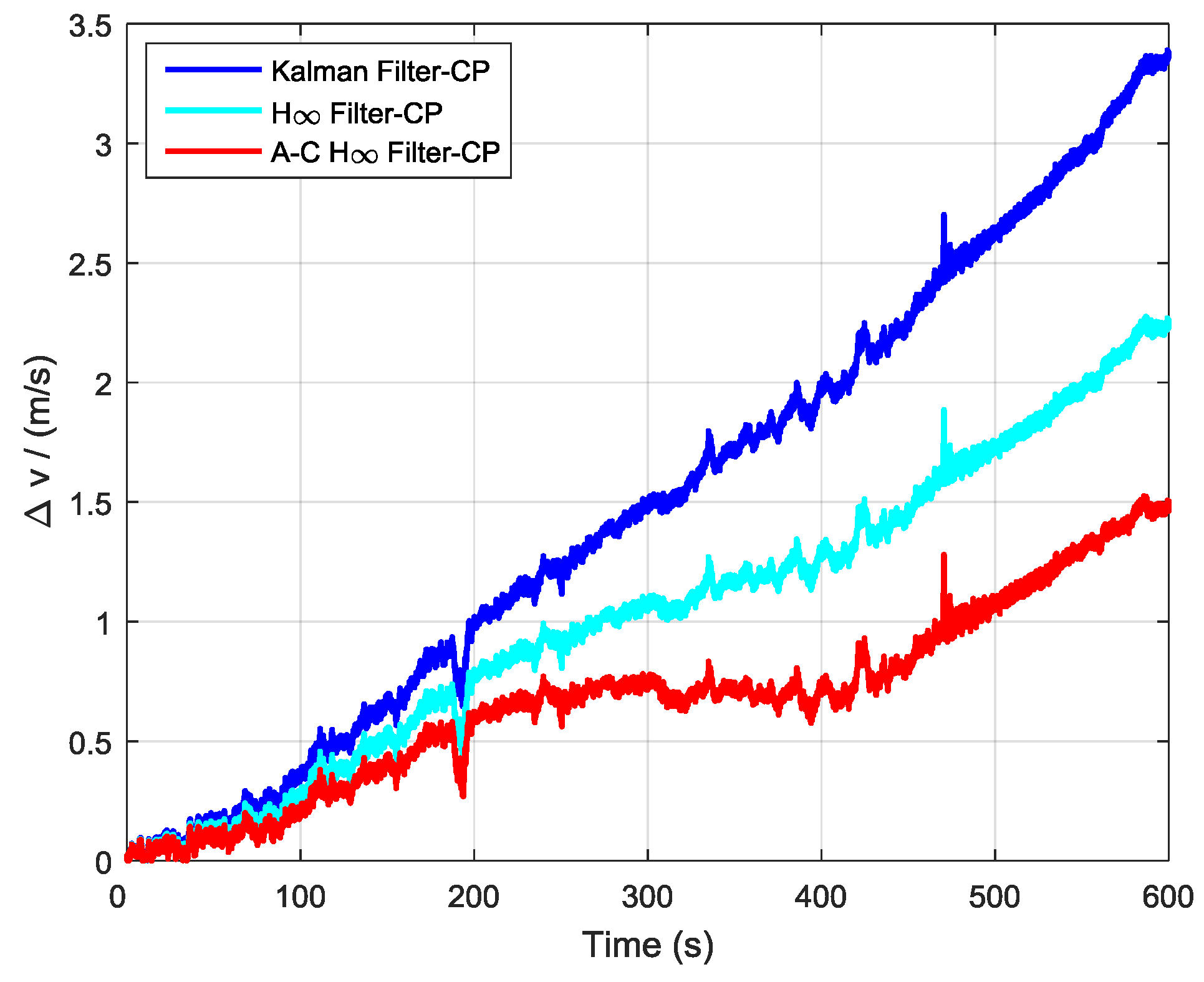
| Method | East Velocity Error | North Velocity Error | Velocity Error |
|---|---|---|---|
| Kalman Filter-CP | −2.17 | 2.58 | 3.38 |
| H∞ Filter-CP | −1.11 | 1.93 | 2.26 |
| A–C H∞ Filter-CP | −0.24 | 1.46 | 1.51 |
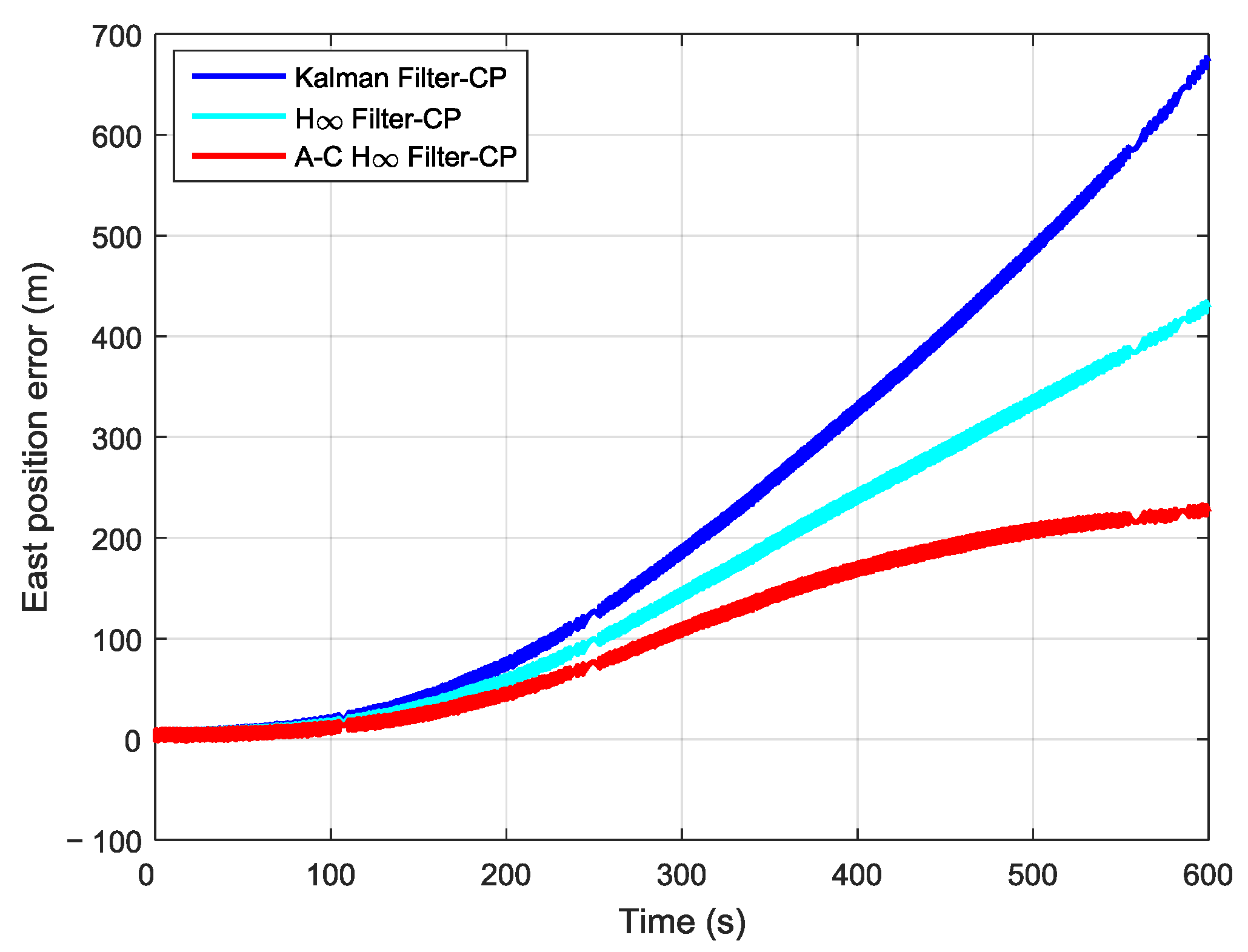
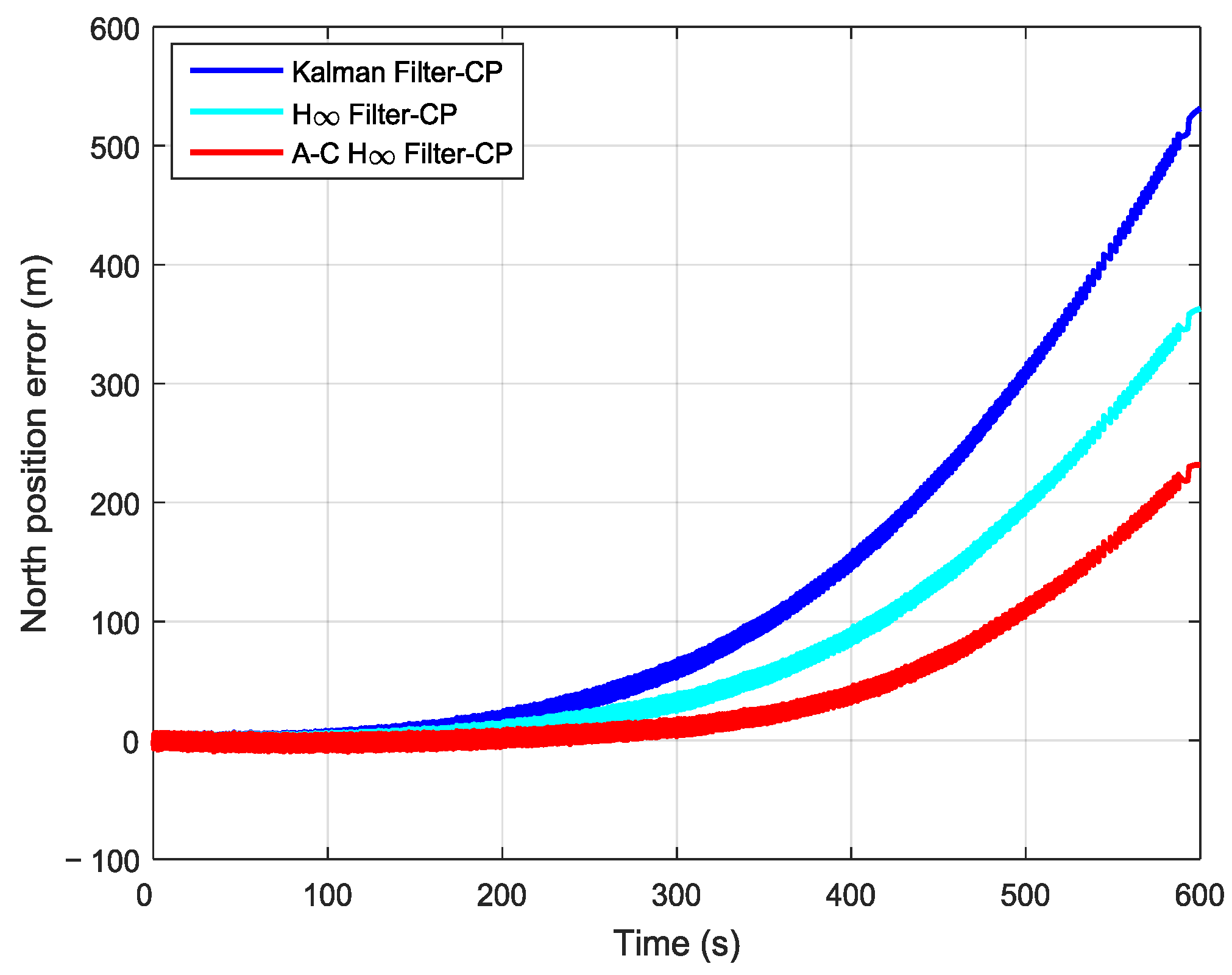
| Method | East Position Error | North Position Error | Position Error |
|---|---|---|---|
| Kalman Filter-CP | 673.12 | 531.41 | 857.62 |
| H∞ Filter-CP | 433.85 | 362.93 | 565.38 |
| A–C H∞ Filter-CP | 226.07 | 231.56 | 323.69 |
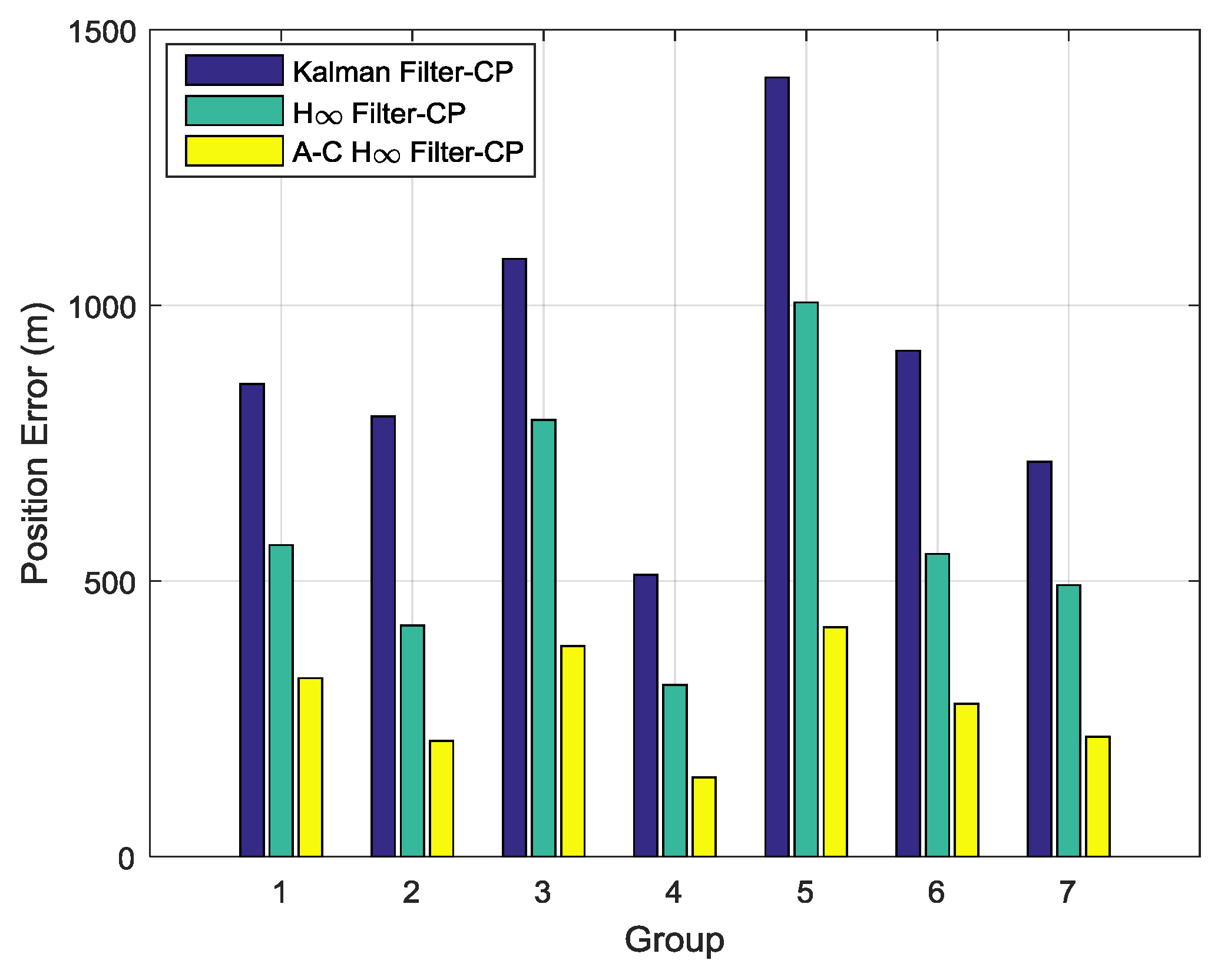
| Method | Group 1 | Group 2 | Group 3 | Group 4 | Group 5 | Group 6 | Group 7 |
|---|---|---|---|---|---|---|---|
| Kalman Filter-CP | 857.62 | 798.60 | 1084.35 | 509.24 | 1413.57 | 917.93 | 716.32 |
| H∞ Filter-CP | 565.38 | 419.71 | 792.53 | 311.57 | 1005.36 | 549.29 | 492.64 |
| A–C H∞ Filter-CP | 323.69 | 210.35 | 382.31 | 143.69 | 416.38 | 277.64 | 217.56 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, W.; Cheng, X.; Wang, J. An Improved Adaptive Compensation H∞ Filtering Method for the SINS’ Transfer Alignment Under a Complex Dynamic Environment. Sensors 2019, 19, 401. https://doi.org/10.3390/s19020401
Lyu W, Cheng X, Wang J. An Improved Adaptive Compensation H∞ Filtering Method for the SINS’ Transfer Alignment Under a Complex Dynamic Environment. Sensors. 2019; 19(2):401. https://doi.org/10.3390/s19020401
Chicago/Turabian StyleLyu, Weiwei, Xianghong Cheng, and Jinling Wang. 2019. "An Improved Adaptive Compensation H∞ Filtering Method for the SINS’ Transfer Alignment Under a Complex Dynamic Environment" Sensors 19, no. 2: 401. https://doi.org/10.3390/s19020401
APA StyleLyu, W., Cheng, X., & Wang, J. (2019). An Improved Adaptive Compensation H∞ Filtering Method for the SINS’ Transfer Alignment Under a Complex Dynamic Environment. Sensors, 19(2), 401. https://doi.org/10.3390/s19020401