Autonomous Exploration for Radioactive Hotspots Localization Taking Account of Sensor Limitations


Abstract
1. Introduction
2. Related Work
2.1. Exploration Strategies
2.2. Radioactive Hotspot Detection and Localization
3. Problem Statement
4. Exploration Approaches
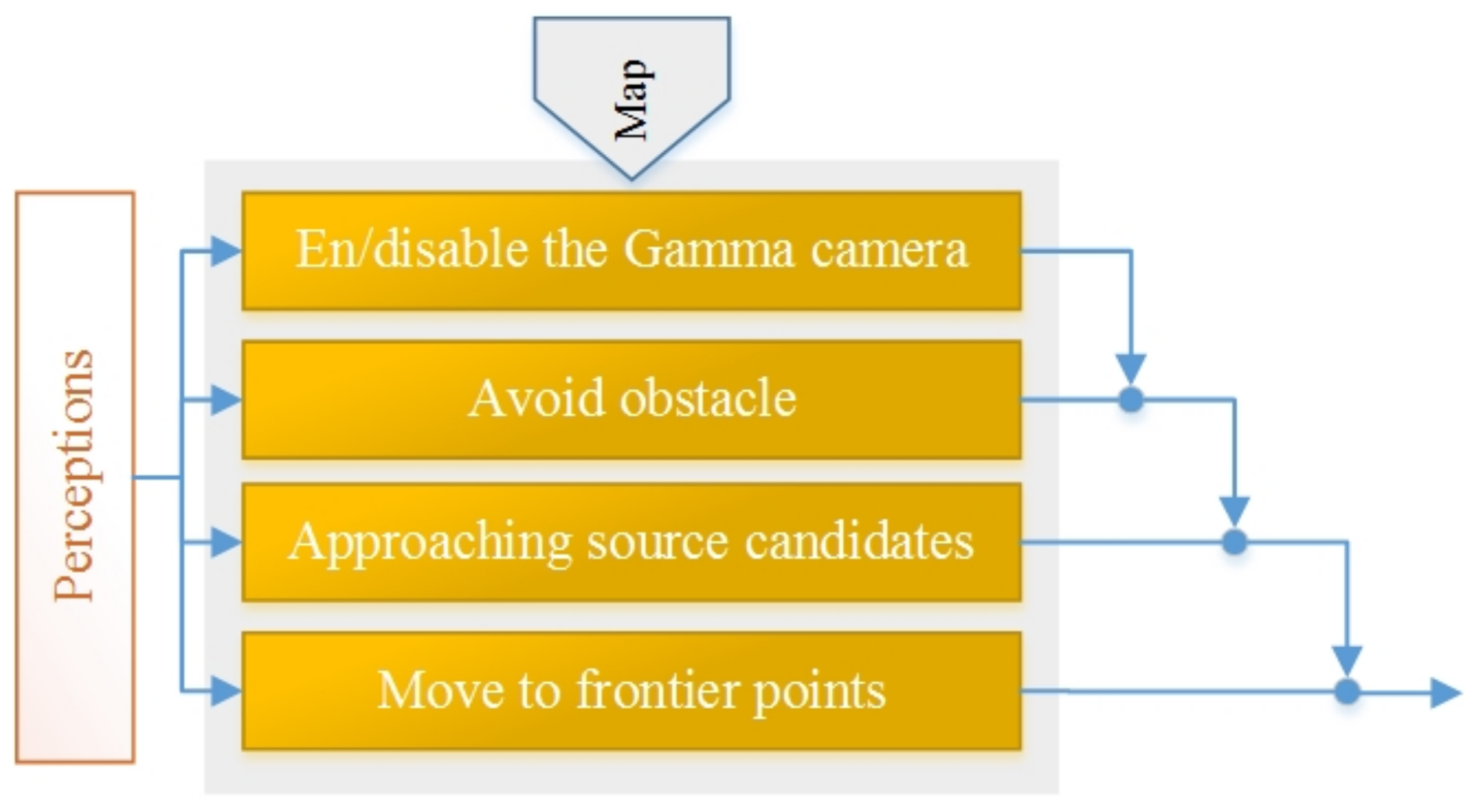
4.1. The Behaviour-Based Approach
4.2. MCDM Approach
4.2.1. The Criteria
4.2.2. Definition of the Utility Function
4.2.3. MCDM Approach Implementation
4.3. The Radioactive Hotspot Validation Method
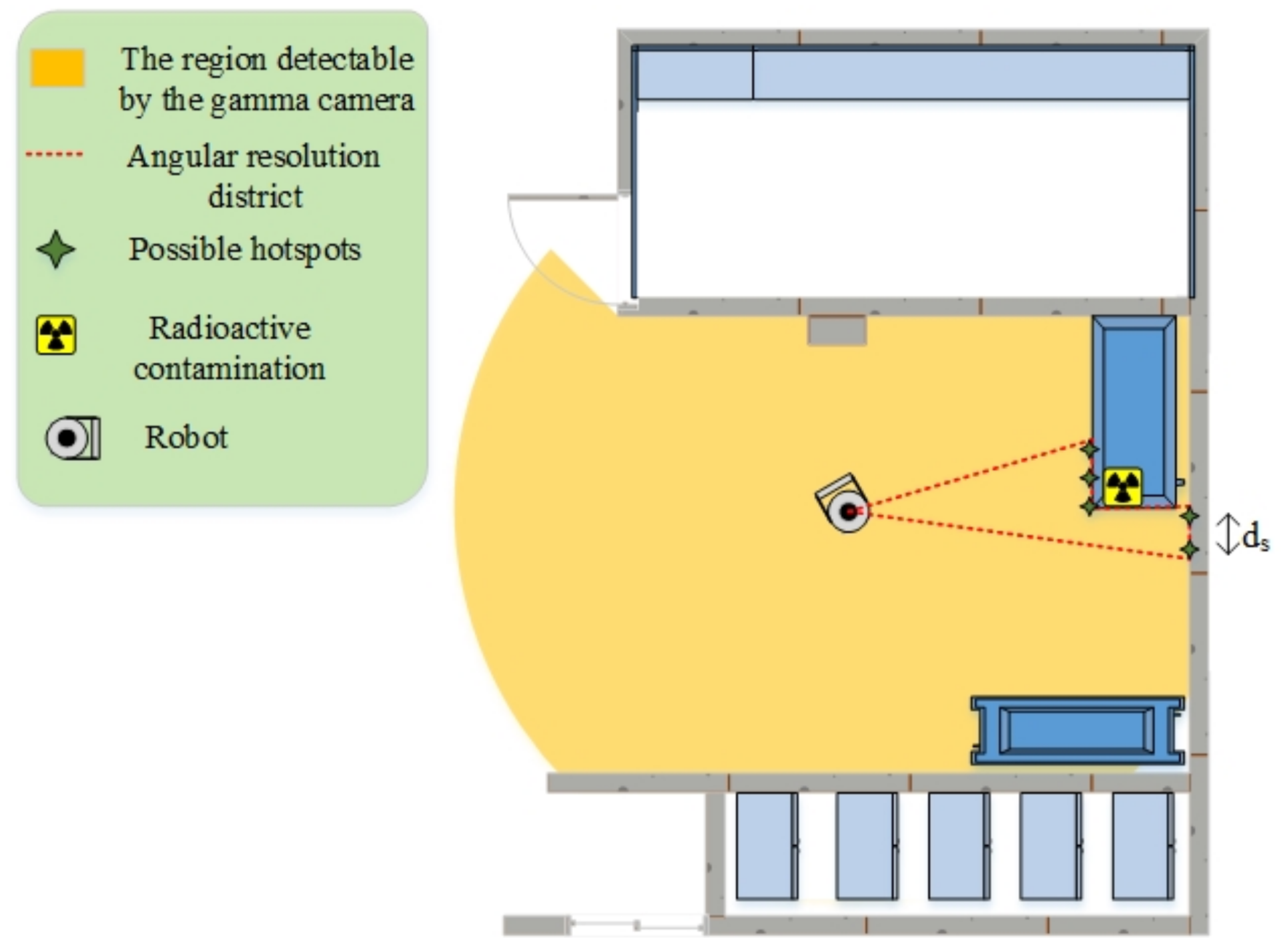
- The possibility of each source candidate rises if it is visible by the activated gamma camera. As the robot cannot separately distinguish sources that are placed in the same AR district (red-dotted zone in Figure 2), the possibilities of all candidates on the contaminated AR district increase.
- The possibility of each candidate source decreases if the candidate source is visible through the gamma camera. The gamma camera will be activated in different locations, so the possibility of fake source candidates will quickly reach zero.
- The possibility of each source always decreases over time. The rate of this decrease is often very low.
5. The Architecture of the Autonomous Exploration System
6. Implementation
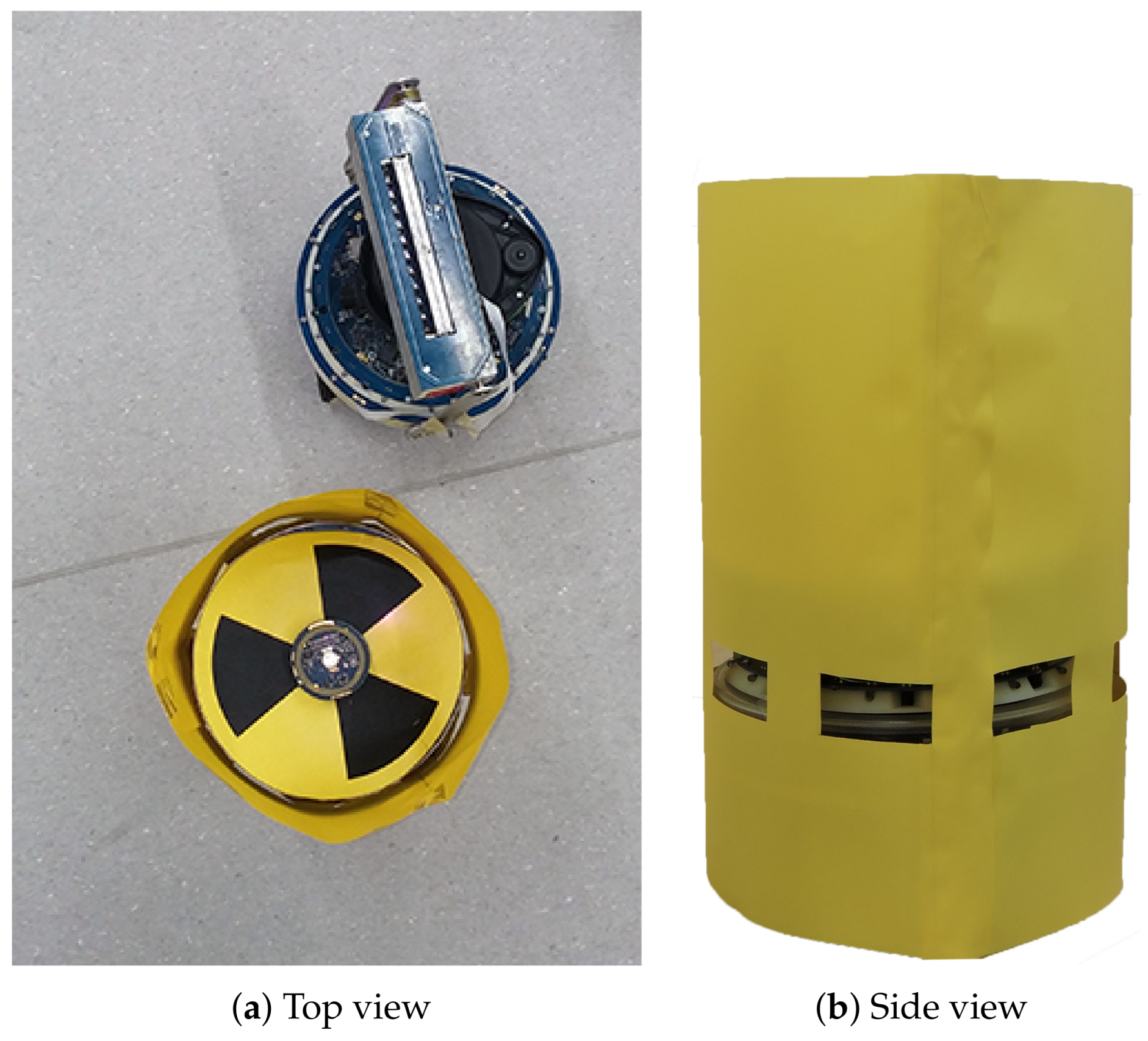
6.1. Robotic Platform
6.2. Simulator
6.3. Gamma Camera and Radioactive Sources
7. Experiments, Evaluations, and Discussions
7.1. Comparison of the Two Exploration Approaches
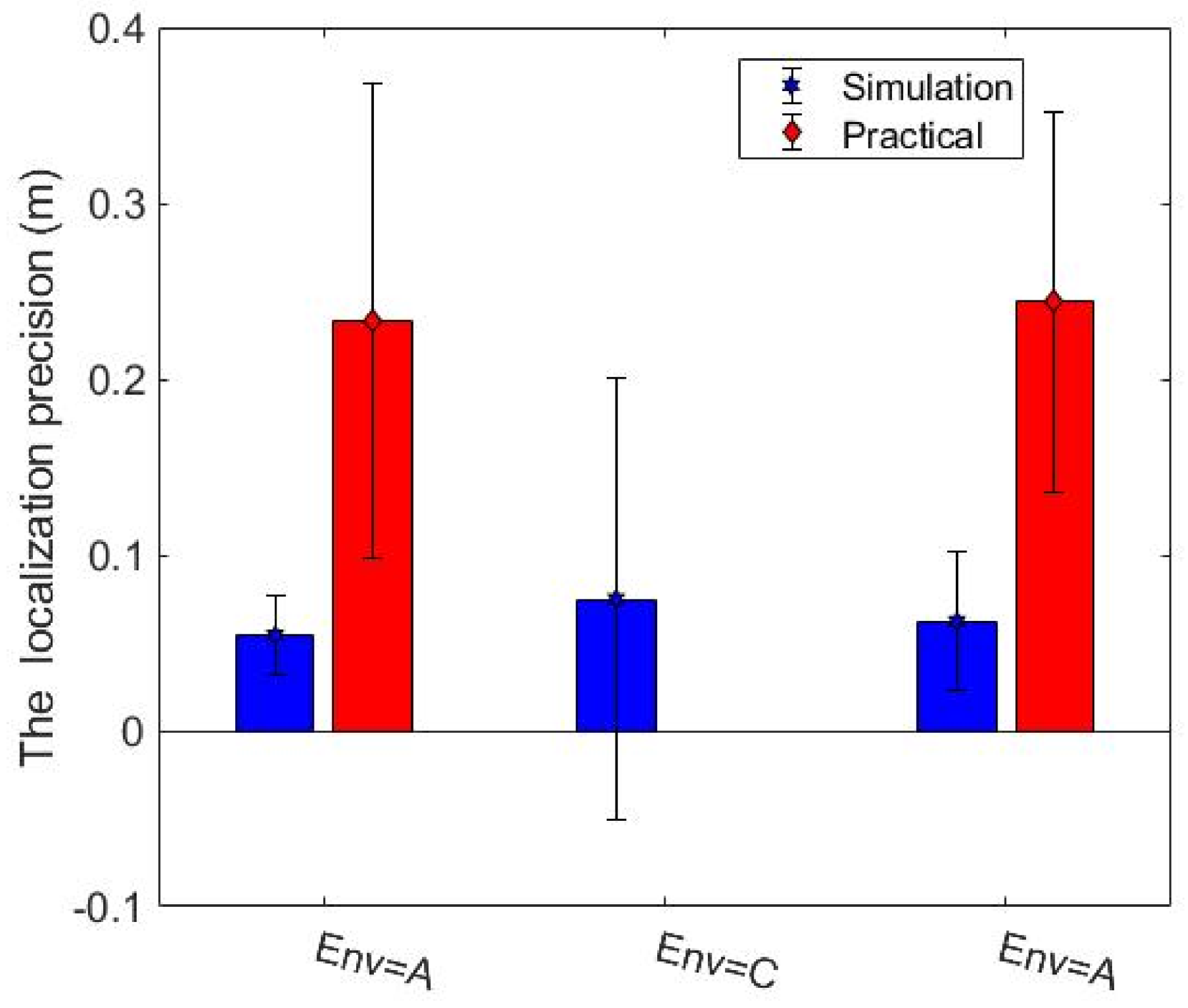
7.2. Further Studies on the MCDM Approach
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AR | Angular Resolution |
| FOV | Field Of View |
| MCDM | Multi-Criteria Decision Making |
| ROS | Robot Operating System |
| SLAM | Simultaneous Localization And Mapping |
| UAV | Unmanned Aerial Vehicle |
References
- Hallenbeck, W.H. Radiation Protection; CRC Press: Boca Raton, FL, USA, 1994. [Google Scholar]
- Murphy, R.R.; Tadokoro, S.; Nardi, D.; Jacoff, A.; Fiorini, P.; Choset, H.; Erkmen, A.M. Search and rescue robotics. In Springer Handbook of Robotics; Springer: Berlin, Germany, 2008; pp. 1151–1173. [Google Scholar]
- Murphy, R.R.; Kravitz, J.; Stover, S.L.; Shoureshi, R. Mobile robots in mine rescue and recovery. IEEE Robot. Autom. Mag. 2009, 16, 91–103. [Google Scholar] [CrossRef]
- Sim, R.; Dudek, G. Effective exploration strategies for the construction of visual maps. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; Volume 4, pp. 3224–3231. [Google Scholar]
- Lu, F.; Milios, E. Robot pose estimation in unknown environments by matching 2d range scans. J. Intell. Robot. Syst. 1997, 18, 249–275. [Google Scholar] [CrossRef]
- McGee, T.G.; Hedrick, J.K. Guaranteed strategies to search for mobile evaders in the plane. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Rudol, P.; Doherty, P. Human body detection and geolocalization for UAV search and rescue missions using color and thermal imagery. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–8. [Google Scholar]
- Tomic, T.; Schmid, K.; Lutz, P.; Domel, A.; Kassecker, M.; Mair, E.; Grixa, I.L.; Ruess, F.; Suppa, M.; Burschka, D. Toward a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue. IEEE Robot. Autom. Mag. 2012, 19, 46–56. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, Z.; Zhang, Y. Aerial Images-Based Forest Fire Detection for Firefighting Using Optical Remote Sensing Techniques and Unmanned Aerial Vehicles. J. Intell. Robot. Syst. 2017, 88, 635–654. [Google Scholar] [CrossRef]
- Molina, M.; Frau, P.; Maravall, D. A Collaborative Approach for Surface Inspection Using Aerial Robots and Computer Vision. Sensors 2018, 18. [Google Scholar] [CrossRef]
- Freda, L.; Oriolo, G. Frontier-Based Probabilistic Strategies for Sensor-Based Exploration. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 3881–3887. [Google Scholar] [CrossRef]
- Arkin, R.C.; Diaz, J. Line-of-sight constrained exploration for reactive multiagent robotic teams. In Proceedings of the 7th International Workshop on Advanced Motion Control, Maribor, Slovenia, 3–5 July 2002; pp. 455–461. [Google Scholar]
- Hoff, N.R., III. Multi–Robot Foraging for Swarms of Simple Robots. Ph.D. Thesis, Harvard University, Cambridge, MA, USA, 2011. [Google Scholar]
- Alers, S.; Claes, D.; Tuyls, K.; Weiss, G. Biologically inspired multi-robot foraging. In Proceedings of the 2014 International Conference on Autonomous Agents and Multi-Agent Systems, Paris, France, 5–9 May 2014; pp. 1683–1684. [Google Scholar]
- Winfield, A.F. Towards an engineering science of robot foraging. In Distributed Autonomous Robotic Systems 8; Springer: Berlin, Germany, 2009; pp. 185–192. [Google Scholar]
- Mataric, M.J.; Michaud, F. Behavior-Based Systems. In Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin, Germany, 2008; Chapter 38; pp. 891–909. [Google Scholar]
- Brooks, R. A robust layered control system for a mobile robot. IEEE J. Robot. Autom. 1986, 2, 14–23. [Google Scholar] [CrossRef]
- Schmidt, D.; Luksch, T.; Wettach, J.; Berns, K. Autonomous behavior-based exploration of office environments. In Proceedings of the ICINCO-RA, Setúbal, Portugal, 1–5 August 2006; pp. 235–240. [Google Scholar]
- Van Nguyen, T.T.; Phung, M.D.; Tran, Q.V. Behavior-based Navigation of Mobile Robot in Unknown Environments Using Fuzzy Logic and Multi-Objective Optimization. arXiv 2017, arXiv:1703.03161. [Google Scholar] [CrossRef]
- Cepeda, J.S.; Chaimowicz, L.; Soto, R.; Gordillo, J.L.; Alanís-Reyes, E.A.; Carrillo-Arce, L.C. A behavior-based strategy for single and multi-robot autonomous exploration. Sensors 2012, 12, 12772–12797. [Google Scholar] [CrossRef]
- Yamauchi, B. A frontier-based approach for autonomous exploration. In Proceedings of the 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Monterey, CA, USA, 10–11 July 1997; pp. 146–151. [Google Scholar]
- Burgard, W.; Moors, M.; Stachniss, C.; Schneider, F.E. Coordinated multi-robot exploration. IEEE Trans. Roboti. 2005, 21, 376–386. [Google Scholar] [CrossRef]
- Auat Cheein, F.; Torres-Torriti, M.; Hopfenblatt, N.B.; Prado, Á.J.; Calabi, D. Agricultural service unit motion planning under harvesting scheduling and terrain constraints. J. Field Robot. 2017, 34, 1531–1542. [Google Scholar] [CrossRef]
- Wirth, S.; Pellenz, J. Exploration transform: A stable exploring algorithm for robots in rescue environments. In Proceedings of the 2007 IEEE International Workshop on Safety, Security and Rescue Robotics, Rome, Italy, 27–29 September 2007; pp. 1–5. [Google Scholar]
- Gonzalez-Banos, H.H.; Latombe, J.C. Navigation strategies for exploring indoor environments. Int. J. Robot. Res. 2002, 21, 829–848. [Google Scholar] [CrossRef]
- Tovar, B.; Munoz-Gómez, L.; Murrieta-Cid, R.; Alencastre-Miranda, M.; Monroy, R.; Hutchinson, S. Planning exploration strategies for simultaneous localization and mapping. Robot. Auton. Syst. 2006, 54, 314–331. [Google Scholar] [CrossRef]
- Amigoni, F.; Gallo, A. A multi-objective exploration strategy for mobile robots. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 3850–3855. [Google Scholar]
- Basilico, N.; Amigoni, F. Exploration strategies based on multi-criteria decision making for searching environments in rescue operations. Auton. Robots 2011, 31, 401–417. [Google Scholar] [CrossRef]
- Sugiyama, H.; Tsujioka, T.; Murata, M. Real-time exploration of a multi-robot rescue system in disaster areas. Adv. Robot. 2013, 27, 1313–1323. [Google Scholar] [CrossRef]
- Cortez, R.; Tanner, H.; Lumia, R. Distributed robotic radiation mapping. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2009; Chapter 10; Volume 54, pp. 147–156. [Google Scholar]
- Rao, N.S.; Shankar, M.; Chin, J.C.; Yau, D.K.; Srivathsan, S.; Iyengar, S.S.; Yang, Y.; Hou, J.C. Identification of low-level point radiation sources using a sensor network. In Proceedings of the International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22–24 April 2008; pp. 493–504. [Google Scholar]
- Chandy, M.; Pilotto, C.; McLean, R. Networked sensing systems for detecting people carrying radioactive material. In Proceedings of the 5th International Conference on Networked Sensing Systems, Kanazawa, Japan, 17–19 June 2008; pp. 148–155. [Google Scholar]
- Howse, J.W.; Ticknor, L.O.; Muske, K.R. Least squares estimation techniques for position tracking of radioactive sources. Automatica 2001, 37, 1727–1737. [Google Scholar] [CrossRef]
- Baidoo-Williams, H.E. Novel Techniques for Estimation and Tracking of Radioactive Sources. Ph.D. Thesis, University of Iowa, Iowa City, IA, USA, 2014. [Google Scholar]
- Towler, J.; Krawiec, B.; Kochersberger, K. Radiation mapping in post-disaster environments using an autonomous helicopter. Remote Sens. 2012, 4, 1995–2015. [Google Scholar] [CrossRef]
- Han, J.; Xu, Y.; Di, L.; Chen, Y. Low-cost Multi-UAV Technologies for Contour Mapping of Nuclear Radiation Field. J. Intell. Robot. Syst. 2013, 70, 401–410. [Google Scholar] [CrossRef]
- Han, J.; Chen, Y. Multiple UAV Formations for Cooperative Source Seeking and Contour Mapping of a Radiative Signal Field. J. Intell. Robot. Syst. 2014, 74, 323–332. [Google Scholar] [CrossRef]
- Du, Y.; He, Z.; Knoll, G.; Wehe, D.; Li, W. Evaluation of a Compton scattering camera using 3-D position sensitive CdZnTe detectors. Nuclear Instrum. Methods Phys. Res. Sect. A 2001, 457, 203–211. [Google Scholar] [CrossRef]
- Xu, D.; He, Z.; Lehner, C.E.; Zhang, F. 4-pi Compton imaging with single 3D position-sensitive CdZnTe detector. In Proceedings of the SPIE 49th Annual Meeting, Denver, CO, USA, 2–6 August 2004; pp. 144–155. [Google Scholar]
- Lehner, C.E.; He, Z.; Zhang, F. 4π Compton imaging using a 3-D position-sensitive CdZnTe detector via weighted list-mode maximum likelihood. IEEE Trans. Nucl. Sci. 2004, 51, 1618–1624. [Google Scholar] [CrossRef]
- Papadimitropoulos, C.; Kaissas, I.; Potiriadis, C.; Karafasoulis, K.; Loukas, D.; Lambropoulos, C. Radioactive source localization by a two detector system. J. Instrum. 2015, 10, C12022. [Google Scholar] [CrossRef]
- Jaworski, J.M.; He, Z. 3D Compton image reconstruction using a moving 3D-position-sensitive room-temperature CdZnTe detector array. In Proceedings of the Nuclear Science Symposium and Medical Imaging Conference (NSS/MIC), Valencia, Spain, 23–29 October 2011; pp. 976–981. [Google Scholar]
- Christian, D.; Gérard, H.; Najib, M.; Philippe, G.; Laurence, B.; Antoine, S.; Eric, J.; Michel, F.J.; Albert, B. RICA: A Tracked Robot for Sampling and Radiological Characterization in the Nuclear Field. J. Field Robot. 2017, 34, 583–599. [Google Scholar]
- Vencelj, M.; Stowe, A.C.; Petrovic, T.; Morrell, J.S.; Kosicek, A. Radiation Area Monitor Device and Method. U.S. Patent 9,881,708, 30 January 2018. [Google Scholar]
- Abadie, J.; Abbott, B.; Abbott, R. Nuclear Instruments and Methods in Physics Research Section A: Accelerators. Spectrom. Detect. Assoc. Equip. 2015, 784, 377–381. [Google Scholar]
- H.E.T.D. Systems. Available online: www.htds.fr (accessed on 2 December 2018).
- Ito, Y.; Tsukamoto, A.; Nakayama, N.; Tsuda, K. Gamma Camera Device. U.S. Patent 5,118,948, 2 June 1992. [Google Scholar]
- Amgarou, K.; Paradiso, V.; Patoz, A.; Bonnet, F.; Handley, J.; Couturier, P.; Becker, F.; Menaa, N. A comprehensive experimental characterization of the iPIX gamma imager. J. Instrum. 2016, 11, P08012. [Google Scholar] [CrossRef]
- Lau, H. Behavioural approach for multi-robot exploration. In Proceedings of the Australasian Conference on Robotics and Automation, Canberra, Australia, 6–8 December 2003. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: Berlin, Germany, 1986; pp. 396–404. [Google Scholar]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Ardiny, H. Functional and Adaptive Construction for Rescue. Ph.D. Thesis, EPFL, Lausanne, Switzerland, 2017. [Google Scholar]
- Gao, W.; Wang, W.; Zhu, H.; Huang, G.; Wu, D.; Du, Z. Robust Radiation Sources Localization Based on the Peak Suppressed Particle Filter for Mixed Multi-Modal Environments. Sensors 2018, 18. [Google Scholar] [CrossRef] [PubMed]
- Fankhauser, P.; Hutter, M. A Universal Grid Map Library: Implementation and Use Case for Rough Terrain Navigation. In Robot Operating System (ROS)—The Complete Reference (Volume 1); Koubaa, A., Ed.; Springer: Berlin, Germany, 2016; Chapter 5. [Google Scholar] [CrossRef]
- Kohlbrecher, S.; Meyer, J.; von Stryk, O.; Klingauf, U. A Flexible and Scalable SLAM System with Full 3D Motion Estimation. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Kyoto, Japan, 31 October–5 November 2011. [Google Scholar]
- Gerkey, B.P.; Konolige, K. Planning and control in unstructured terrain. In Workshop on Path Planning on Costmaps, Proceedings of the IEEE International Conference on Robotics and Automation ICRAW, Pasadena, CA, USA, 19–23 May 2008; Citeseer: Tuscon, AZ, USA, 2008. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]
- Bonani, M.; Longchamp, V.; Magnenat, S.; Retornaz, P.; Burnier, D.; Roulet, G.; Vaussard, F.; Bleuler, H.; Mondada, F. The marXbot, a miniature mobile robot opening new perspectives for the collective-robotic research. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4187–4193. [Google Scholar] [CrossRef]
- Pinciroli, C.; Trianni, V.; O’Grady, R.; Pini, G.; Brutschy, A.; Brambilla, M.; Mathews, N.; Ferrante, E.; Di Caro, G.; Ducatelle, F.; et al. ARGoS: A Modular, Parallel, Multi-Engine Simulator for Multi-Robot Systems. Swarm Intell. 2012, 6, 271–295. [Google Scholar] [CrossRef]
- Knoll, G.F. Radiation Detection and Measurement, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1989. [Google Scholar]
- Carrel, F.; Khalil, R.A.; Blot, P.; Boudergui, K.; Colas, S.; Gmar, M.; Lemasle, F.; Saurel, N.; Schoepff, V.; Toubon, H. GAMPIX: A new generation of gamma camera for hot spot localisation. In Proceedings of the ISOE Conference, Cambridge, MA, USA, 3–8 October 2010. [Google Scholar]
- Wang, J.J.; Jing, Y.Y.; Zhang, C.F.; Zhao, J.H. Review on multi-criteria decision analysis aid in sustainable energy decision-making. Renew. Sustain. Energy Rev. 2009, 13, 2263–2278. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detectors | Type | Field of view (FOV) (deg) | AR (deg) | Acquisition Time (s) | Weight (kg) |
|---|---|---|---|---|---|
| Polaris-H [45] | Compton (CZT) | 360 | 20–30 | 30< | 4.04 |
| HSL-Lite [46] | Coded mask and dynamic imaging mask | 60 | <10 | 900< | 6.5 |
| Toshiba [47] | - | 60 | - | - | 9.8 |
| iPIX [48] | GAMPIX coded mask | 45–50 | 2.5–6 | 1< | 2 |
| AISense [44] | Hotspot locator (without camera) | 360 | - | 0.1 | 2.2 |
| States | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| FOV (deg) | 360 | 360 | 360 | 360 | 180 | 90 | 45 |
| AR (deg) | 30 | 20 | 10 | 2.5 | 2.5 | 2.5 | 2.5 |
| Condition | |||||
|---|---|---|---|---|---|
| With a candidate hotspot | 0.3 | 0.1 | 0.05 | 0.3 | 0.25 |
| Without any candidate hotspot | 0.3 | 0.6 | 0.1 | 0 | 0 |
| Method | First Source (Ave.) | Second Source (Ave.) |
|---|---|---|
| Behaviour-based | 93% | 50% |
| MCDM | 100% | 97% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ardiny, H.; Witwicki, S.; Mondada, F. Autonomous Exploration for Radioactive Hotspots Localization Taking Account of Sensor Limitations. Sensors 2019, 19, 292. https://doi.org/10.3390/s19020292
Ardiny H, Witwicki S, Mondada F. Autonomous Exploration for Radioactive Hotspots Localization Taking Account of Sensor Limitations. Sensors. 2019; 19(2):292. https://doi.org/10.3390/s19020292
Chicago/Turabian StyleArdiny, Hadi, Stefan Witwicki, and Francesco Mondada. 2019. "Autonomous Exploration for Radioactive Hotspots Localization Taking Account of Sensor Limitations" Sensors 19, no. 2: 292. https://doi.org/10.3390/s19020292
APA StyleArdiny, H., Witwicki, S., & Mondada, F. (2019). Autonomous Exploration for Radioactive Hotspots Localization Taking Account of Sensor Limitations. Sensors, 19(2), 292. https://doi.org/10.3390/s19020292