Hydrodynamic Analysis-Based Modeling and Experimental Verification of a New Water-Jet Thruster for an Amphibious Spherical Robot



 , ,
, ,
Abstract
1. Introduction
2. Related Works
2.1. Prototype of the Amphibious Spherical Robot IV
2.2. Propulsion Mechanism of the Amphibious Spherical Robot IV
2.3. Prototype of the New Water-Jet Thruster
3. Hydrodynamic Simulation Details of the Thruster
3.1. Establishment of the Computational Domain
3.2. Numerical Grids
3.3. Solver Settings
4. Simulation Analysis
4.1. Effect of Nozzle Diameter on Hydrodynamic Simulation Results
4.2. Effect of Advance Coefficient on Hydrodynamic Simulation Results
4.2.1. Effect of Advance Coefficient on Thrust
4.2.2. Pressure Distribution on Blades
4.2.3. Effects of Advance Coefficient on Flow in the Thruster
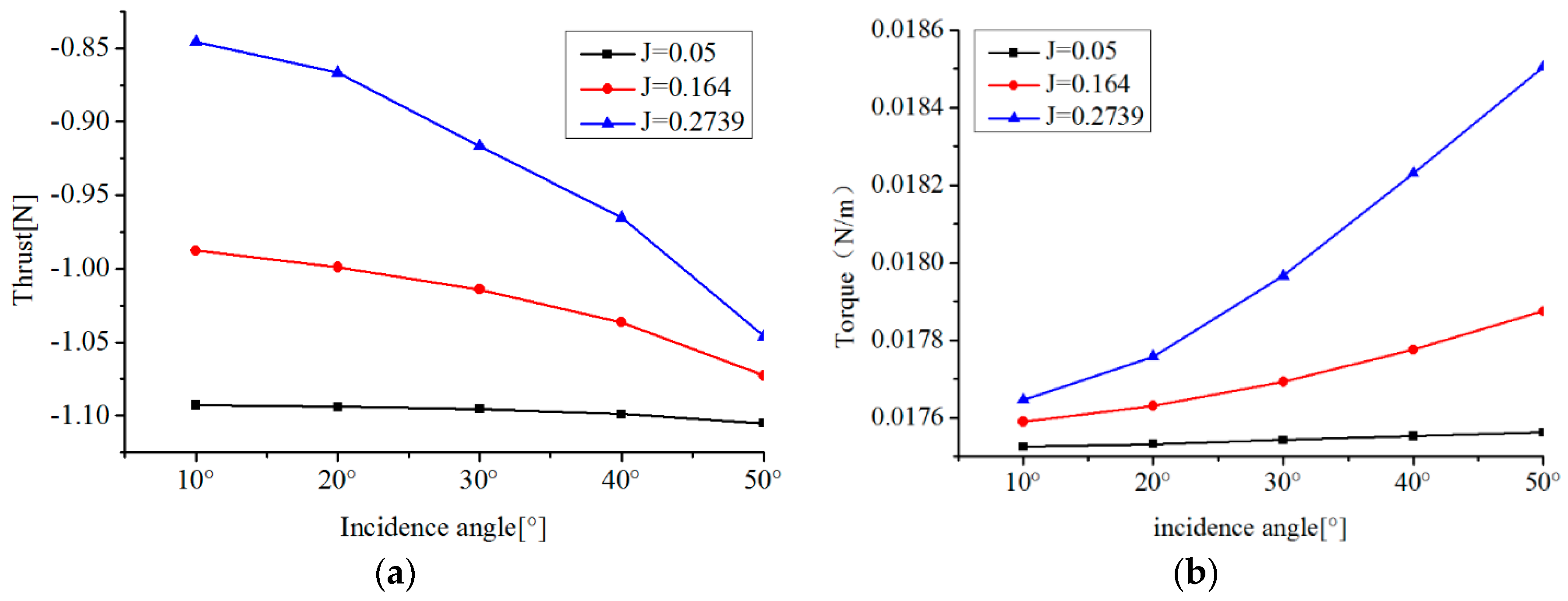
4.3. Effect of the Angle of Oblique Flow on Hydrodynamic Simulation Results
4.3.1. Effect of the Angle on Thrust
4.3.2. Effect of the Oblique Flow Angle on Pressure Distribution
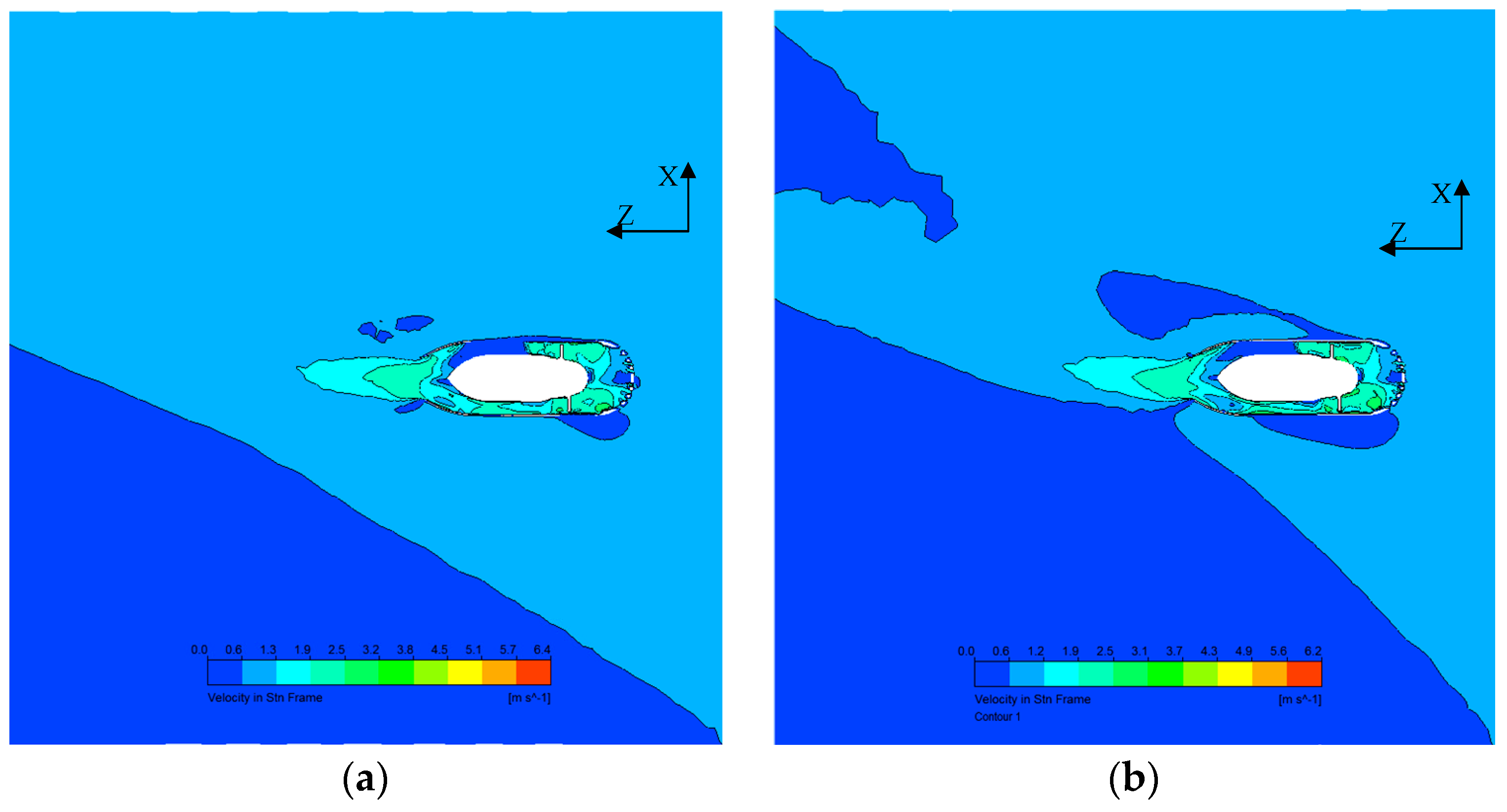
4.3.3. Effect of the Angle on Flow Inside the Thruster
5. Model of the New Water-Jet Thruster
5.1. Basic Model of the New Water-Jet Thruster
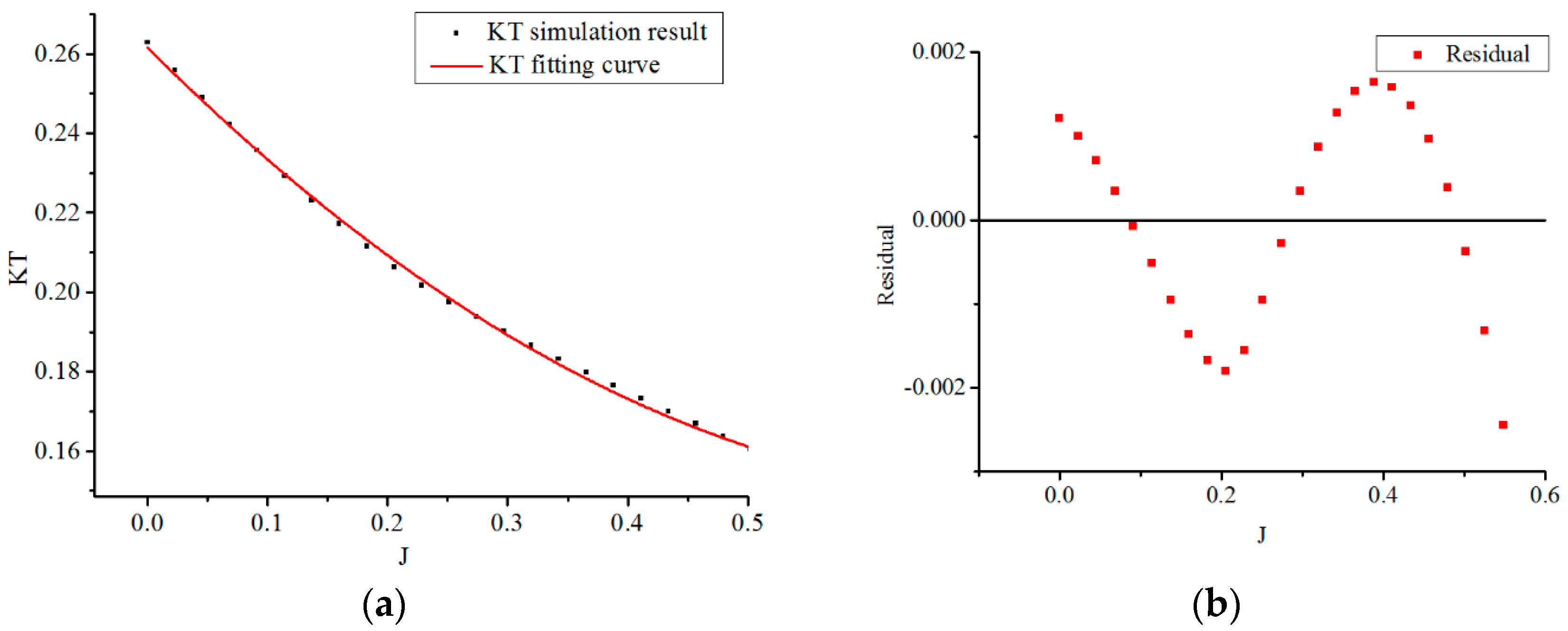
5.2. Identifying the Parameters of the Thrust Model
6. Verification of the Thrust Model of the New Water-Jet Thruster
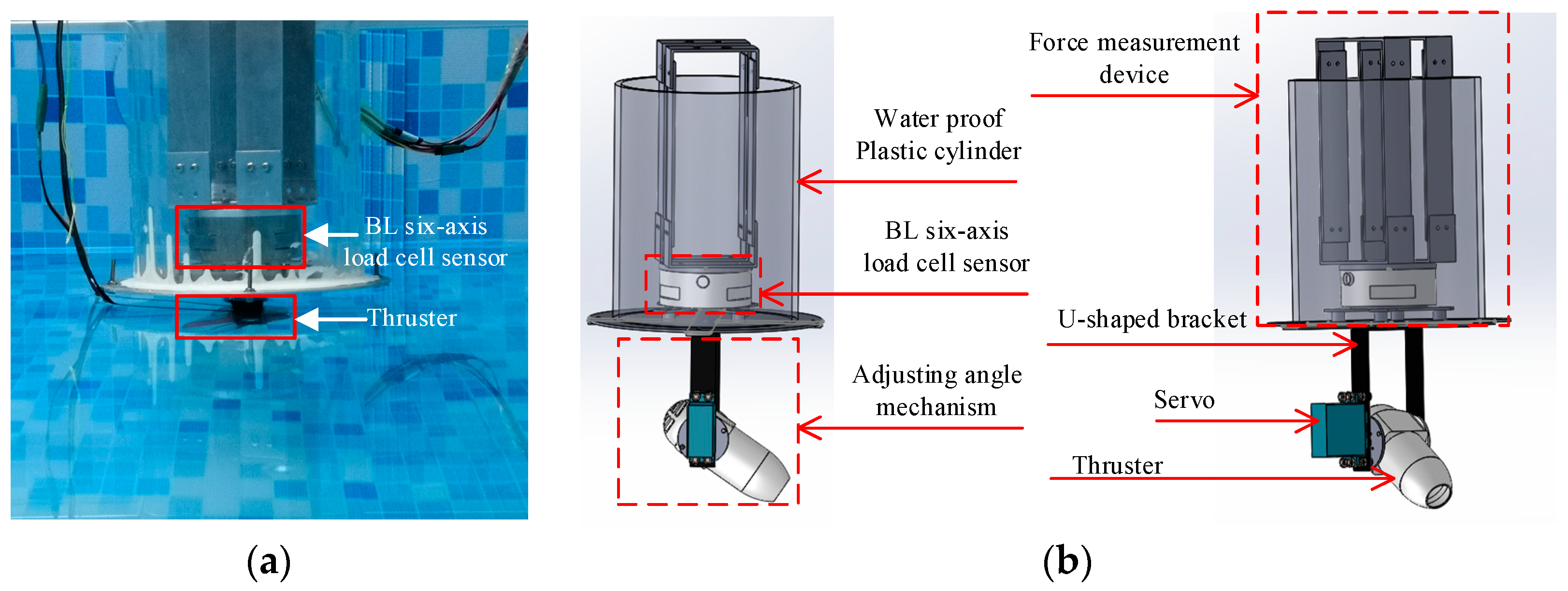
6.1. Experimental Design and Preparation
6.2. Validation of the Numerical Simulation
6.3. Experimental Verification of the Thrust Model
6.3.1. Verification of Thrust Model at Different Velocities of Flow Water
6.3.2. Verification of the Thrust Model under Different Oblique Angles
6.4. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhong, B.; Zhang, S.; Xu, M.; Zhou, Y.; Fang, T.; Li, W. On a CPG-based Hexapod Robot: AmphiHex-II with Variable Stiffness Legs. IEEE/ASME Trans. Mechatron. 2018, 23, 542–551. [Google Scholar] [CrossRef]
- Boxerbaum, A.S.; Werk, P.; Quinn, R.D.; Vaidyanathan, R. Design of an autonomous amphibious robot for surf zone operation: Part I- mechanical design for multi-mode mobility. In Proceedings of the 2005 IEEE International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 1459–1464. [Google Scholar]
- Shi, L.; Guo, S.; Mao, S.; Yue, C.; Li, M.; Asaka, K. Development of an amphibious turtle-inspired spherical mother robot. J. Bionic Eng. 2013, 10, 446–455. [Google Scholar] [CrossRef]
- Guo, S.; Pan, S.; Shi, L.; Guo, P.; He, Y.; Tang, K. Visual Detection and Tracking System for a Spherical Amphibious Robot. Sensors 2017, 17, 870. [Google Scholar] [CrossRef]
- Ivan, M.; Julian, G.; Cesar, G.; Spartacus, G.; Jacopo, A.; Joaquin, D.R. New Vectorial Propulsion System and Trajectory Control Designs for Improved AUV Mission Autonomy. Sensors 2018, 18, 1241. [Google Scholar] [CrossRef]
- Yu, J.; Ding, R.; Yang, Q.; Tan, M.; Wang, W.; Zhang, J. On a bio-inspired amphibious robot capable of multimodal motion. IEEE/ASME Trans. Mechatron. 2012, 17, 847–856. [Google Scholar] [CrossRef]
- Yu, J.; Tang, Y.; Zhang, X.; Liu, C. Design of a wheel-propeller-leg integrated amphibious robot. In Proceedings of the 2010 IEEE International Conference on Control Automation Robotics & Vision, Marina Bay, Singapore, 7–10 December 2010; pp. 1815–1819. [Google Scholar]
- Tang, Y.; Zhang, A.; Yu, J. Modeling and Optimization of Wheel-Propeller-Leg Integrated Driving Mechanism for an Amphibious Robot. In Proceedings of the Second International Conference on Information and Computing Science, Manchester, UK, 21–22 May 2009; pp. 73–76. [Google Scholar]
- Zhang, S.; Zhou, Y.; Xu, M.; Liang, X.; Liu, L.; Yang, J. AmphiHex-I: Locomotory Performance in Amphibious Environments with Specially Designed Transformable Flipper Legs. IEEE/ASME Trans. Mechatron. 2016, 21, 1720–1731. [Google Scholar] [CrossRef]
- Guo, S.; He, Y.; Shi, L.; Pan, S.; Xiao, R.; Tang, K.; Guo, P. Modeling and experimental evaluation of an improved amphibious robot with compact structure. Robot. Comput. Integr. Manuf. 2018, 51, 37–52. [Google Scholar] [CrossRef]
- Guo, S.; He, Y.; Shi, L.; Pan, S.; Tang, K.; Xiao, R.; Guo, P. Modal and fatigue analysis of critical components of an amphibious spherical robot. Microsyst. Technol. 2016, 23, 1–15. [Google Scholar] [CrossRef]
- He, Y.; Shi, L.; Guo, S.; Pan, S.; Wang, Z. Preliminary mechanical analysis of an improved amphibious spherical father robot. Microsyst. Technol. 2016, 22, 1–16. [Google Scholar] [CrossRef]
- Xing, H.; Guo, S.; Shi, L.; He, Y.; Su, S.; Chen, Z.; Hou, X. Hybrid Locomotion Evaluation for a Novel Amphibious Spherical Robot. Appl. Sci. 2018, 8, 156. [Google Scholar] [CrossRef]
- Xing, H.; Guo, S.; Shi, L.; Hou, X.; Su, S.; Chen, Z.; Liu, Y.; Liu, H. Performance Evaluation of a Multi-Vectored Water-Jet Propellers Device for an Amphibious Spherical Robot. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation, Changchun, China, 5–8 August 2018; pp. 1591–1596. [Google Scholar]
- Hou, X.; Guo, S.; Shi, L.; Xing, H.; Su, S.; Chen, Z.; Liu, Y.; Liu, H. Hydrodynamic Analysis of a Novel Thruster for Amphibious Sphere Robots. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation, Changchun, China, 5–8 August 2018; pp. 1603–1608. [Google Scholar]
- Chung, H.K.; Kim, J. Analysis of underwater thruster model with ambient flow velocity using CFD. Intell. Serv. Robot. 2013, 6, 163–168. [Google Scholar] [CrossRef]
- Kim, J.; Han, J.; Chung, W.K.; Yuh, J.; Lee, P. Accurate and Practical Thruster Modeling for Underwater Vehicles. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 175–180. [Google Scholar]
- Tangler, J.; Kocurek, D. Wind Turbine Post-Stall Airfoil Performance Characteristics Guidelines for Blade-Element Momentum Methods. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 10–13 January 2005. [Google Scholar]
- Gill, R.; D’Andrea, R. Propeller thrust and drag in forward flight. In Proceedings of the 2017 IEEE Conference on Control Technology and Applications, Mauna Lani, HI, USA, 27–30 August 2017; pp. 73–79. [Google Scholar]
- Guo, S.; Lin, X.; Tanaka, K.; Hata, S. Modeling of Water-Jet Propeller for Underwater Vehicles. In Proceedings of the 2010 IEEE International Conference on Automation and Logistics, HongKong, China, 16–20 August 2010; pp. 92–97. [Google Scholar]
- Recommended Procedures and Guidelines, Testing and Extrapolation Methods Propulsion, Propulsor, Open water test. In Proceedings of the 25th International Towing Tank Conference (ITTC), Venice, Italy, 8–14 September 2002.
- Yoerger, D.R.; Cooke, J.G.; Slotine, J. The Influence of Thruster Dynamics on Underwater Vehicle Behavior and Their Incorporation into Control System Design. IEEE J. Ocean. Eng. 1990, 15, 167–178. [Google Scholar] [CrossRef]
- Sun, Y.; Su, Y.; Wang, X.; Hu, H. Experimental and Numerical Analyses of the Hydrodynamic Performance of Propeller Boss Cap Fins in a Propeller-Rudder System. Eng. Appl. Comput. Fluid Mech. 2016, 10, 145–159. [Google Scholar] [CrossRef]
- Joung, T.H.; Choi, H.S.; Jung, S.K.; Sammut, K.; He, F.P. Verification of CFD Analysis Methods for Predicting the Drag Force and Thrust Power of an Underwater Disk Robot. Int. J. Nav. Archit. Ocean Eng. 2014, 6, 269–281. [Google Scholar] [CrossRef]
- Javier, G.R.; Hugo, M.; Aguirre, A.J.; Bone, A.; Puyuelo, J.; Vidal, M. Validation of a CFD Model by Using 3D Sonic Anemometers to Analyse the Air Velocity Generated by an Air-Assisted Sprayer Equipped with Two Axial Fans. Sensors 2015, 15, 2399–2418. [Google Scholar]
- Bennaya, M.; Gong, J.; Hegaze, M.; Zhang, W. Numerical simulation of marine propeller hydrodynamic performance in uniform inflow with different turbulence models. Appl. Mech. Mater. 2013, 389, 1019–1025. [Google Scholar] [CrossRef]
- Bennaya, M.; Zhang, W.; Hegaze, M. Estimation of the Induced Hydrodynamic Periodic Forces of Marine Propeller under Non-Uniform Inflow via CFD. Appl. Mech. Mater. 2014, 467, 293–299. [Google Scholar] [CrossRef]
- Yu, L.; Greve, M.; Druckenbrod, M.; Abdel-Maksoud, M. Numerical Analysis of Ducted Propeller Performance under Open Water Test Condition. J. Mar. Sci. Technol. 2013, 18, 381–394. [Google Scholar] [CrossRef]
- Cho, L.; Lee, S.; Cho, J. Numerical and Experimental Analyses of the Ducted Fan for the Small VTOL UAV Propulsion. Trans. Jpn. Soc. Aeronaut. Space Sci. 2013, 56, 328–336. [Google Scholar] [CrossRef]
- Aras, M.S.M.; Abdullah, S.S.; Azhan, A.R.; Aziz, M.A.A. Thruster Modelling for Underwater Vehicle Using System Identification Method. Int. J. Adv. Robot. Syst. 2013, 10, 252. [Google Scholar] [CrossRef]
- Pan, S.; Shi, L.; Guo, S. A Kinect-Based Real-Time Compressive Tracking Prototype System for Amphibious Spherical Robots. Sensors 2015, 15, 8232–8252. [Google Scholar] [CrossRef]
- Joung, T.H.; Sammut, K.; He, F.; Lee, S.K. Shape Optimization of an Autonomous Underwater Vehicle with a Ducted Propeller using Computational Fluid Dynamics Analysis. Int. J. Nav. Archit. Ocean Eng. 2012, 4, 44–56. [Google Scholar] [CrossRef]
- Recommended Procedures and Guidelines, Practical Guidelines for Ship CFD Application. In Proceedings of the 27th International Towing Tank Conference (ITTC), Copenhagen, Denmark, 31 August–5 September 2014.
- Recommended Procedures and Guidelines, Practical Guidelines for Ship Self-Propulsion CFD. In Proceedings of the 27th International Towing Tank Conference (ITTC), Copenhagen, Denmark, 31 August–5 September 2014.
- Majdfar, S.; Ghassemi, H.; Forouzan, H.; Ashrafi, A. Hydrodynamic Prediction of The Ducted Propeller by CFD Solver. J. Mar. Sci. Technol. 2017, 25, 268–275. [Google Scholar]
- Potsdam Propeller Test Case (PPTC). Available online: https://www.sva-potsdam.de/wp-content/uploads/2016/04/SVA_report_3752.pdf (accessed on 12 December 2018).
- Wang, C.; Sun, S.; Sun, S.; Li, L. Numerical Analysis of Propeller Exciting Force in Oblique Flow. J. Mar. Sci. Technol. 2017, 22, 602–619. [Google Scholar] [CrossRef]
- Ship Hydrodynamics_Lecture_Notes_Part_5_Propeller_Theories. Available online: http://160.75.46.2/staff/emin/Lectures/Ship_Hydro/SHIP%20HYDRODYNAMICS_LECTURE_NOTES_PART_5_PROPELLER_THEORIES.pdf (accessed on 3 January 2019).
- Bontempo, R.; Manna, M. Analysis and Evaluation of the Momentum Theory Errors as Applied to Propellers. AIAA J. 2016, 54, 3840–3848. [Google Scholar] [CrossRef]
- Lin, X.; Guo, S. Development of A Spherical Underwater Robot Equipped with Multiple Vectored Water-Jet-Based Thrusters. J. Intell. Robot. Syst. 2012, 67, 307–321. [Google Scholar] [CrossRef]
- Recommended Procedures and Guidelines, Uncertainty Analysis in CFD Verification and Validation Methodology and Procedures. In Proceedings of the 25th International Towing Tank Conference (ITTC), Fukuoka, Japan, 14–20 September 2008.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Propeller diameter | D = 36.5 mm |
| Number of blades | Z = 5 |
| Thruster length | L = 96.3 mm |
| Rated power of motor | 80 W |
| Total Cells (103) | Rotational Region Cells (103) | Thrust (N) | Difference % | |
|---|---|---|---|---|
| Experiment | 2.424 | |||
| MESH1 | 32.313 | 13.888 | 1.983 | 18.19 |
| MESH2 | 58.138 | 24.316 | 2.118 | 12.62 |
| MESH3 | 118.985 | 45.393 | 2.316 | 4.46 |
| MESH4 | 173.321 | 96.384 | 2.358 | 2.72 |
| MESH5 | 218.648 | 121.688 | 2.367 | 2.35 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, X.; Guo, S.; Shi, L.; Xing, H.; Liu, Y.; Liu, H.; Hu, Y.; Xia, D.; Li, Z. Hydrodynamic Analysis-Based Modeling and Experimental Verification of a New Water-Jet Thruster for an Amphibious Spherical Robot. Sensors 2019, 19, 259. https://doi.org/10.3390/s19020259
Hou X, Guo S, Shi L, Xing H, Liu Y, Liu H, Hu Y, Xia D, Li Z. Hydrodynamic Analysis-Based Modeling and Experimental Verification of a New Water-Jet Thruster for an Amphibious Spherical Robot. Sensors. 2019; 19(2):259. https://doi.org/10.3390/s19020259
Chicago/Turabian StyleHou, Xihuan, Shuxiang Guo, Liwei Shi, Huiming Xing, Yu Liu, Huikang Liu, Yao Hu, Debin Xia, and Zan Li. 2019. "Hydrodynamic Analysis-Based Modeling and Experimental Verification of a New Water-Jet Thruster for an Amphibious Spherical Robot" Sensors 19, no. 2: 259. https://doi.org/10.3390/s19020259
APA StyleHou, X., Guo, S., Shi, L., Xing, H., Liu, Y., Liu, H., Hu, Y., Xia, D., & Li, Z. (2019). Hydrodynamic Analysis-Based Modeling and Experimental Verification of a New Water-Jet Thruster for an Amphibious Spherical Robot. Sensors, 19(2), 259. https://doi.org/10.3390/s19020259