Experimental Study for Damage Identification of Storage Tanks by Adding Virtual Masses


Abstract
:1. Introduction
2. Damage Identification of Storage Tanks Using Additional Virtual Masses
2.1. Adding Virtual Masses
2.2. Preliminary Localization of Damage
2.3. Damage Identification Based on Sensitivity
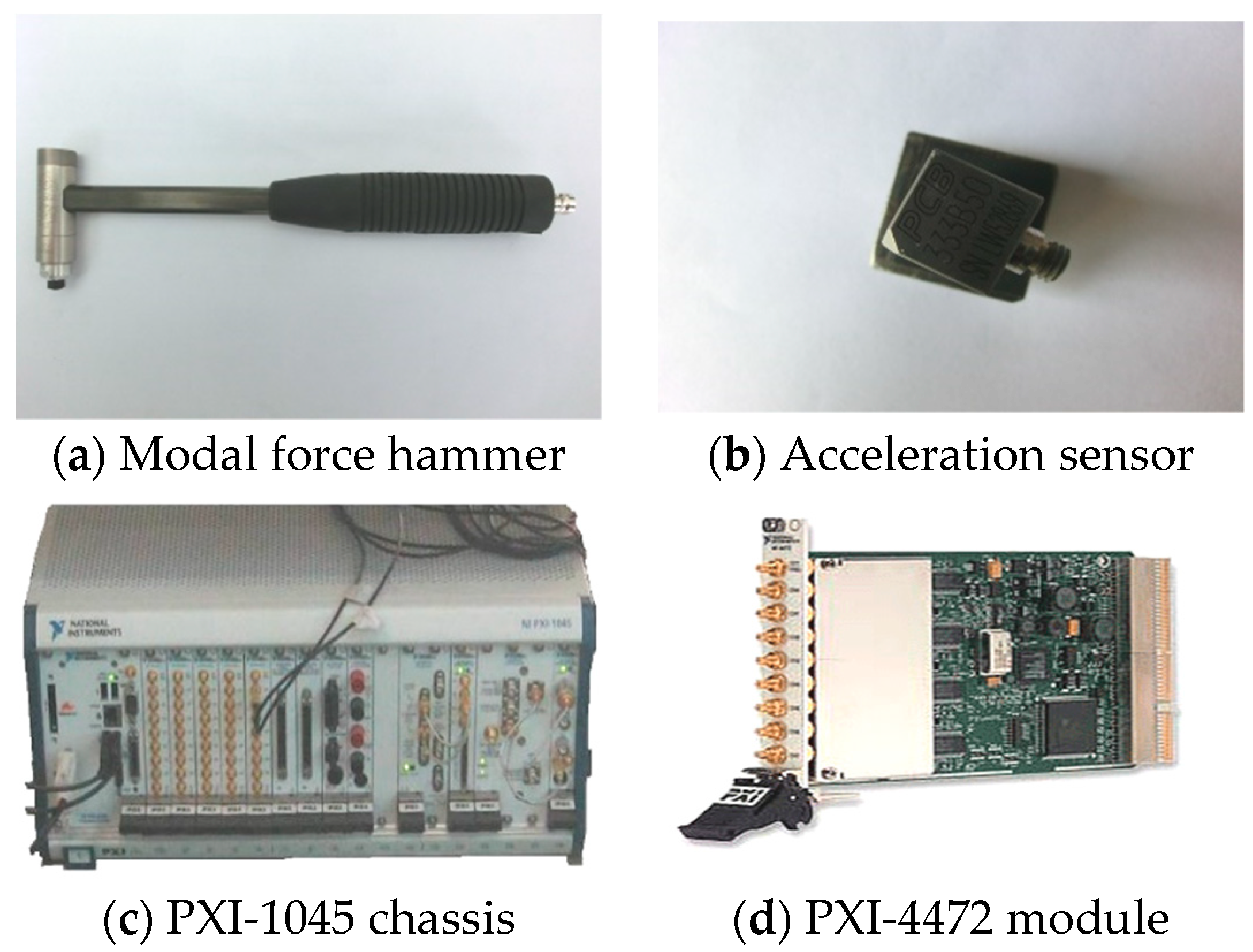
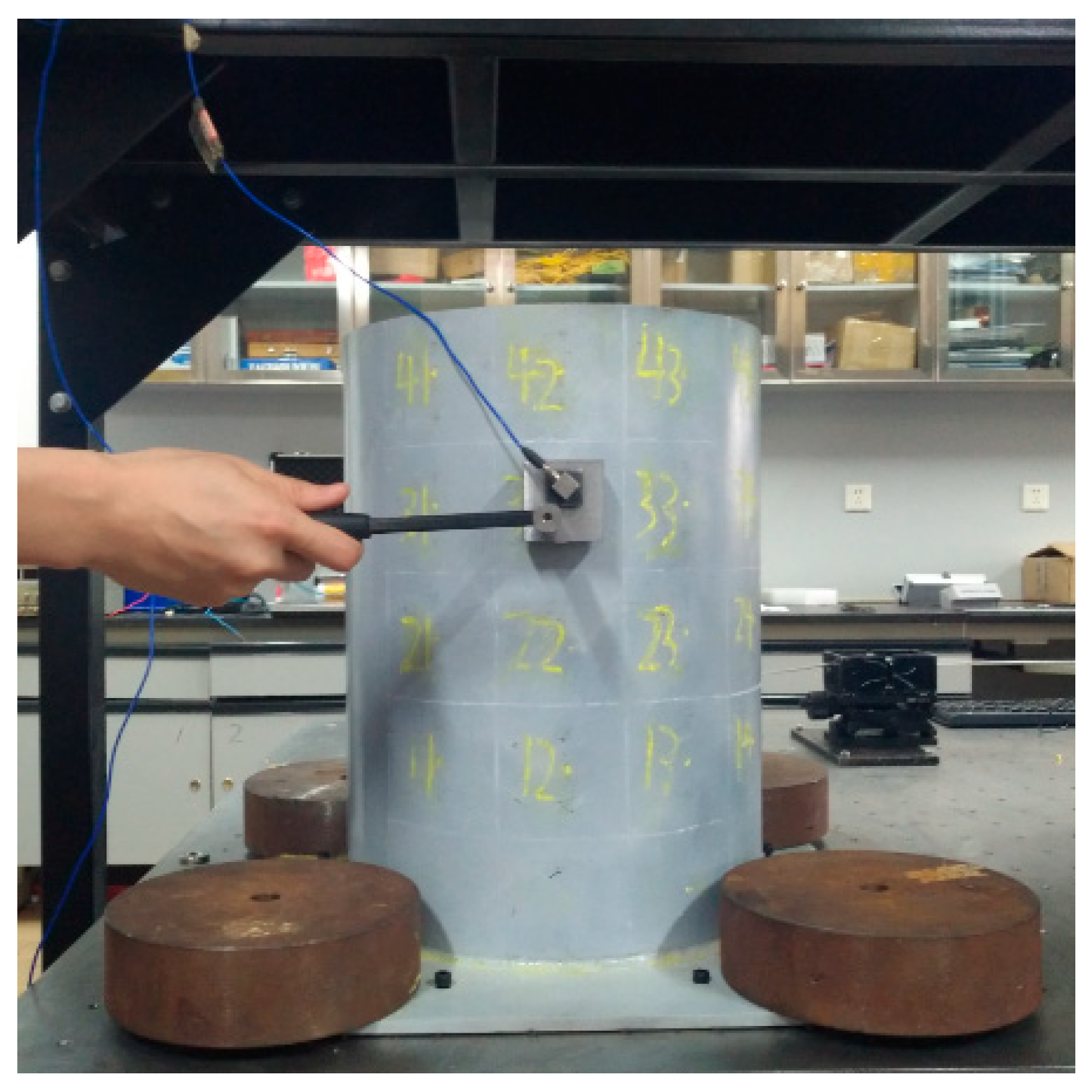
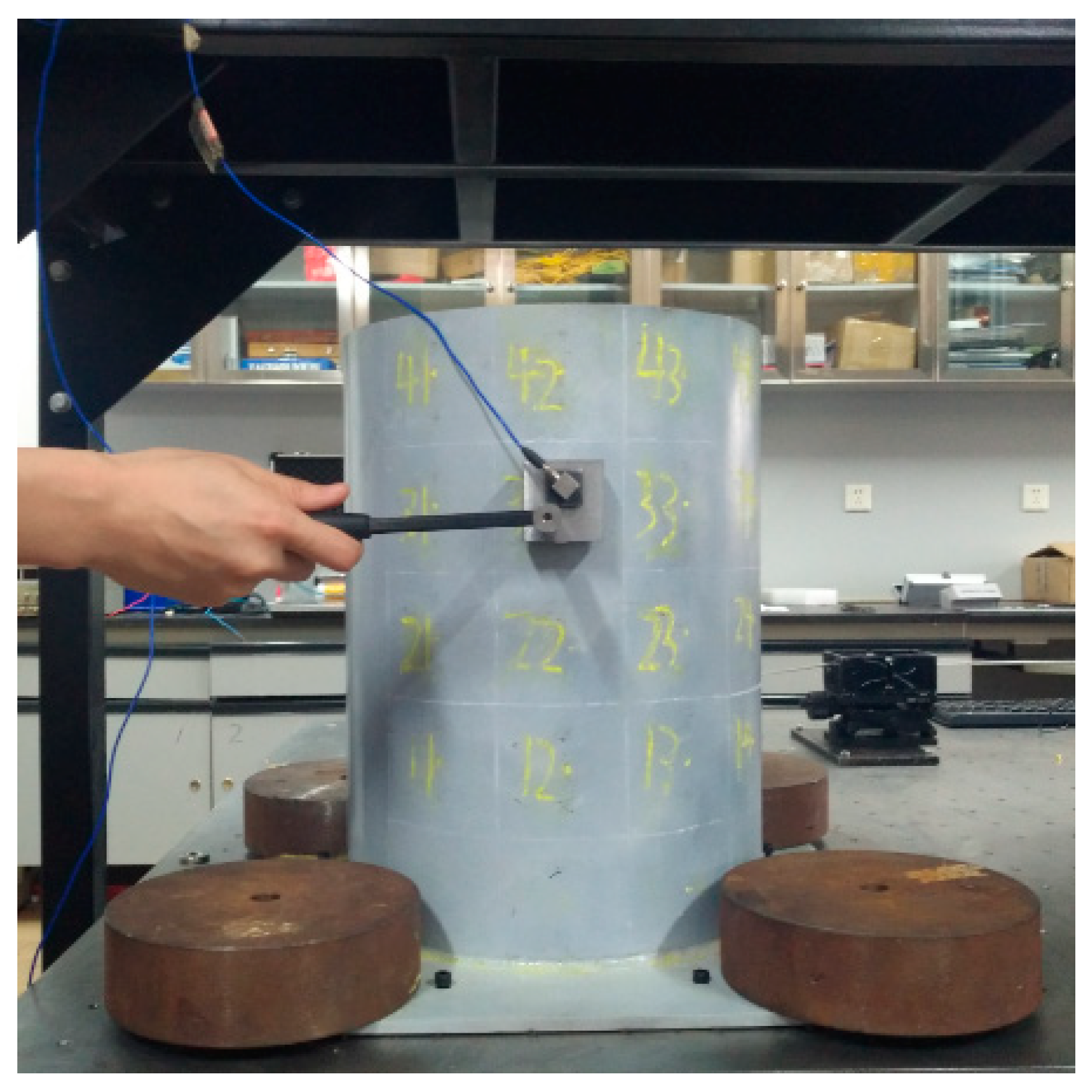
3. Experiments of Tanks
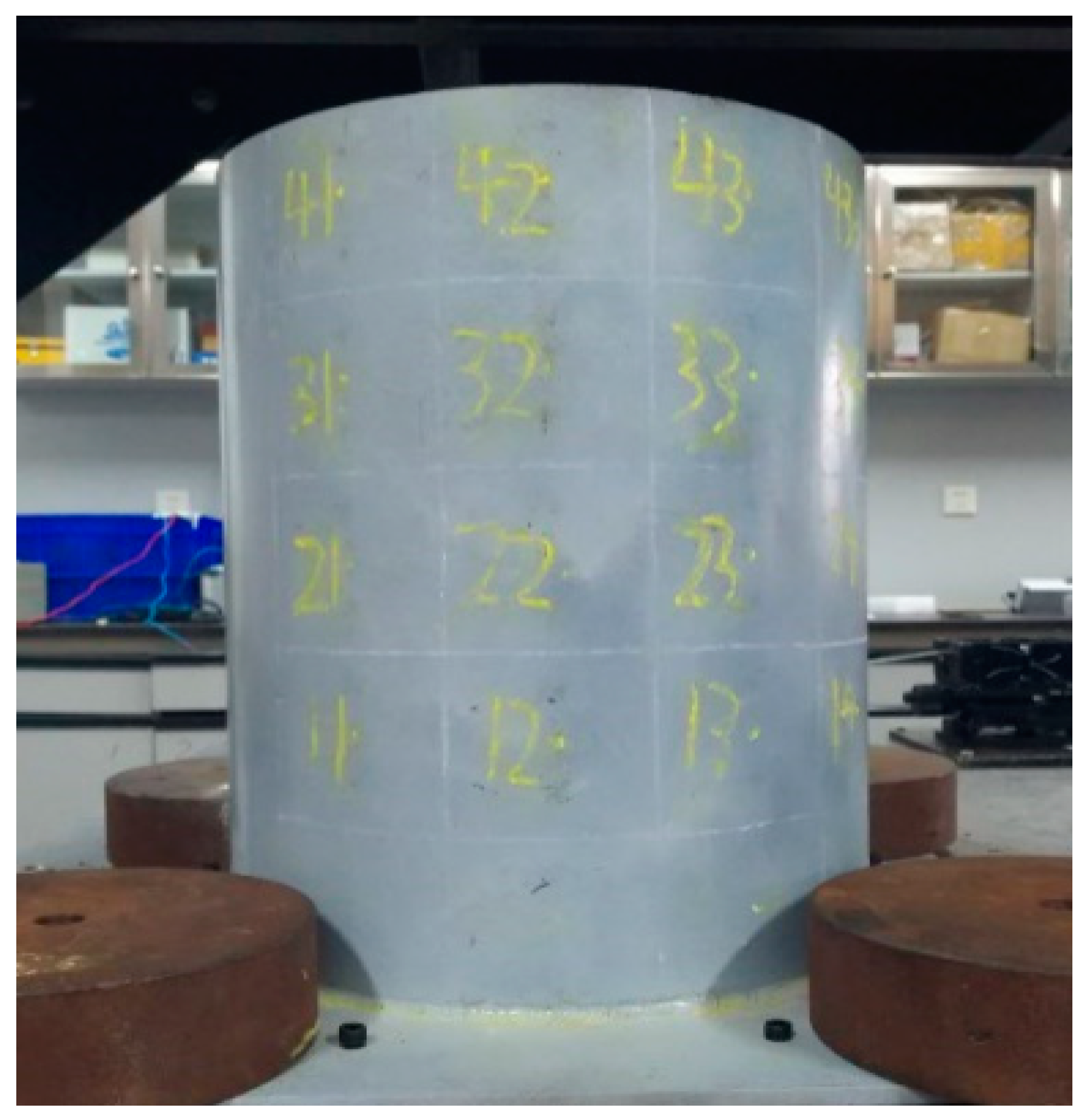
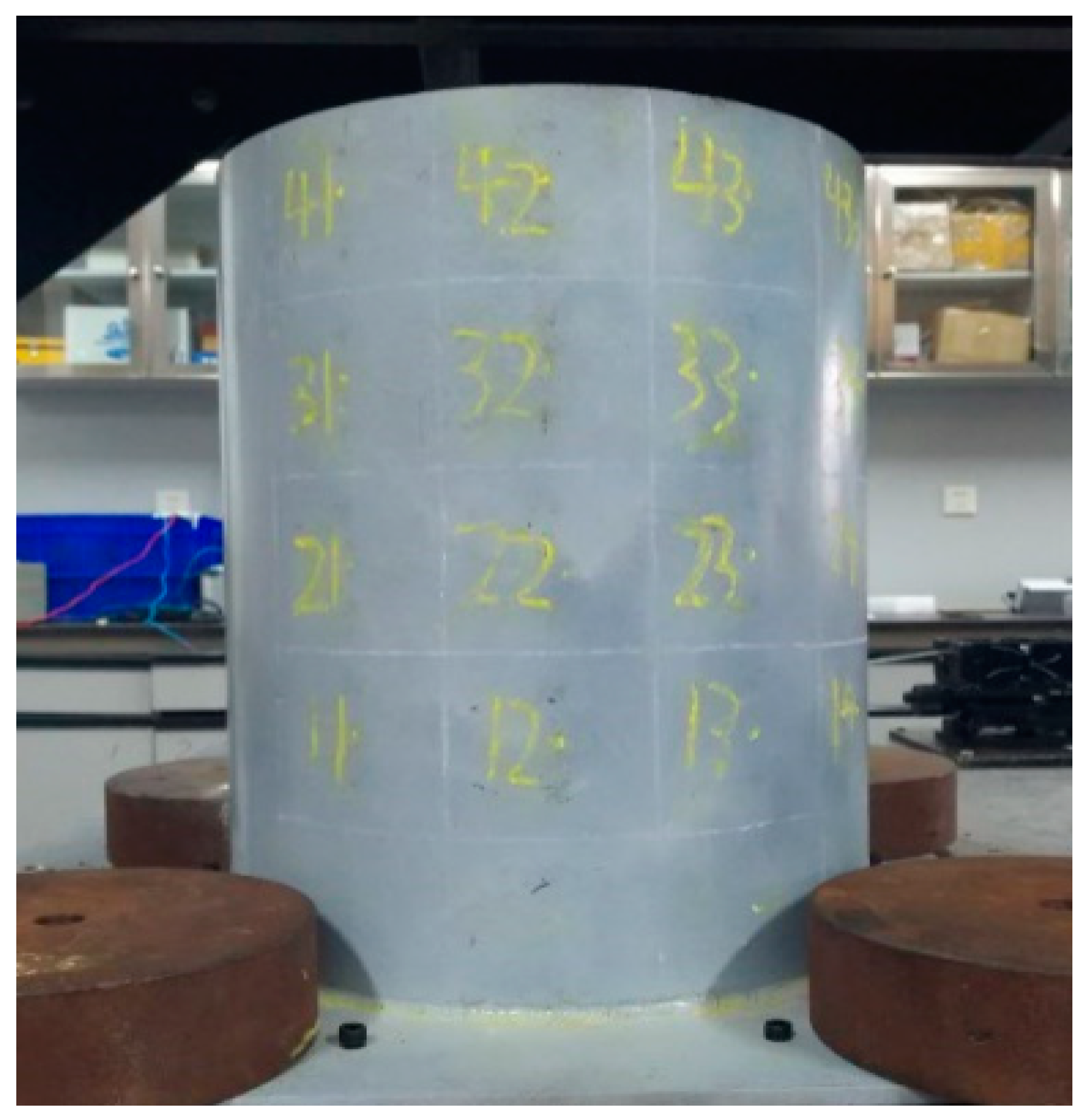
3.1. Models of the Experiment
3.2. Numerical Finite Element Model
3.2.1. Foundation of the Model
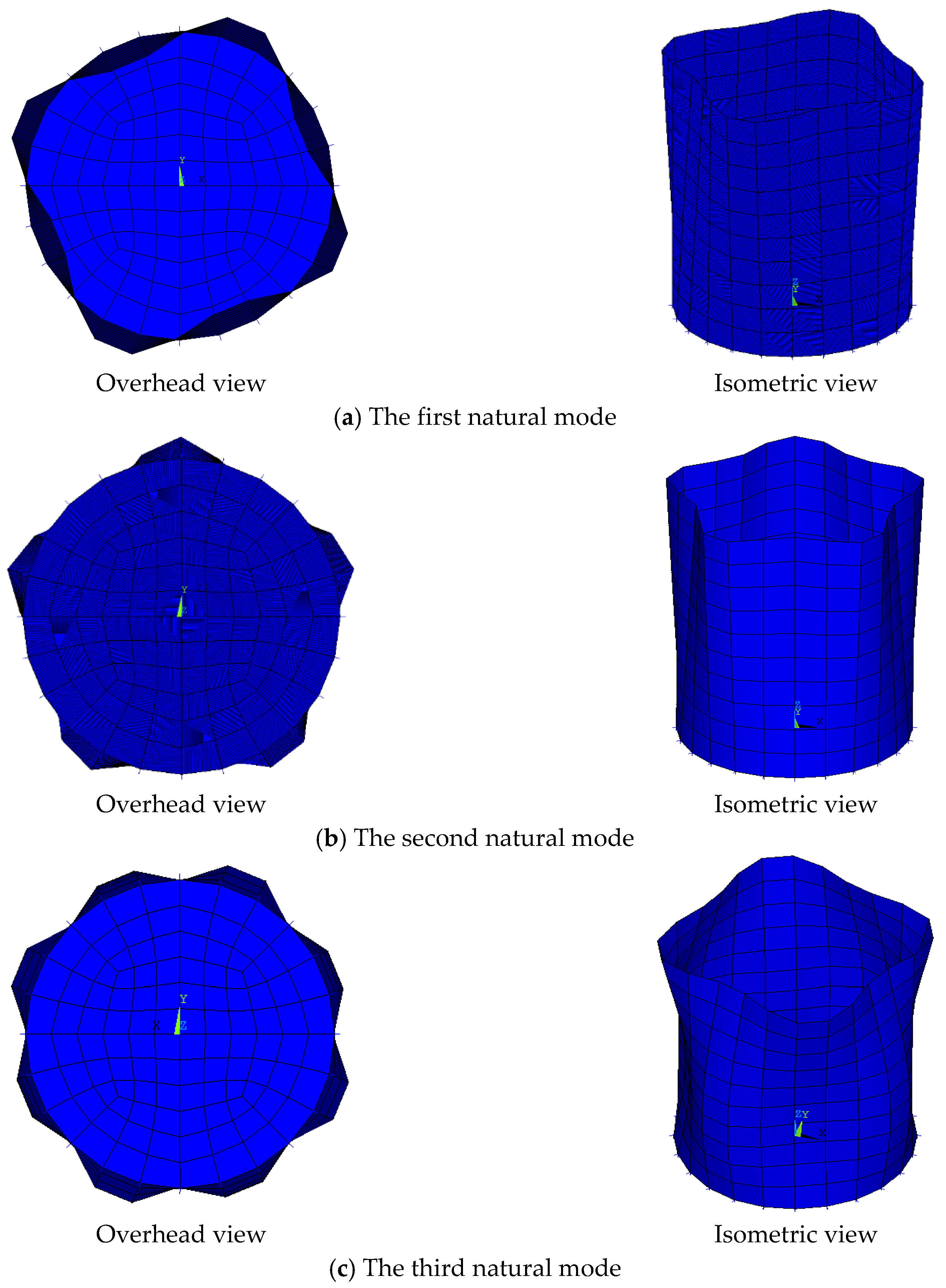
3.2.2. Modal Analysis
3.2.3. Model Modification
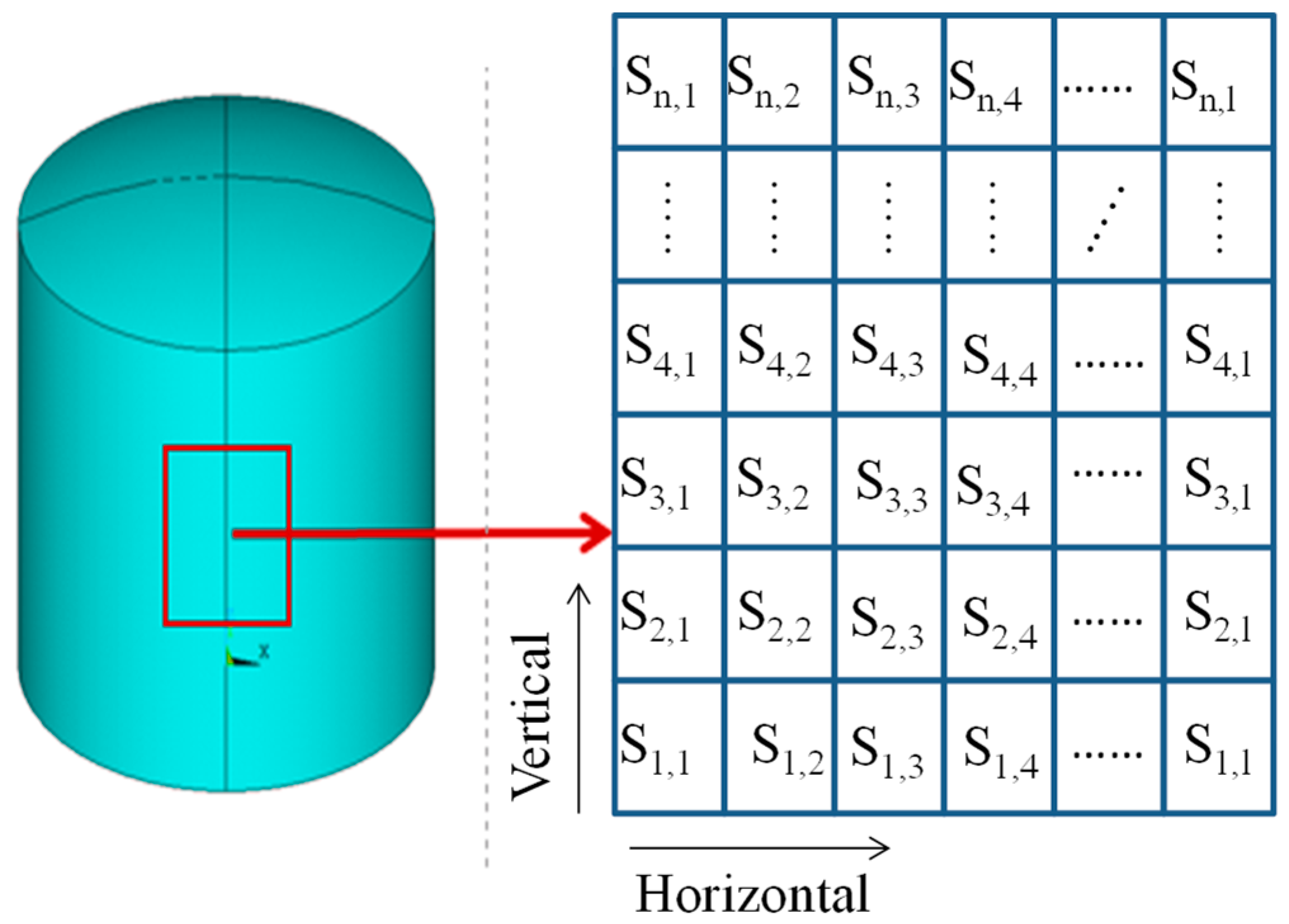
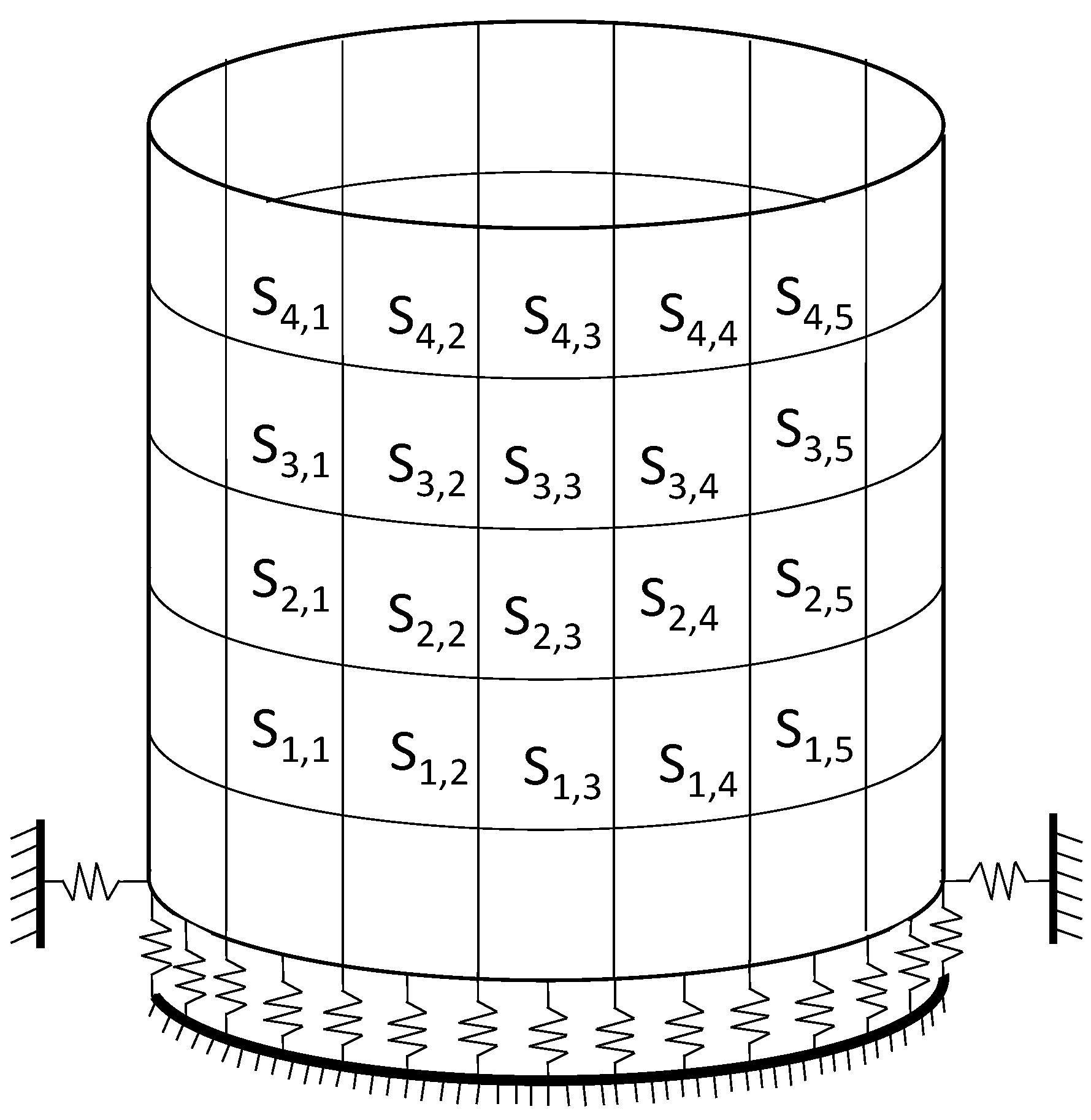
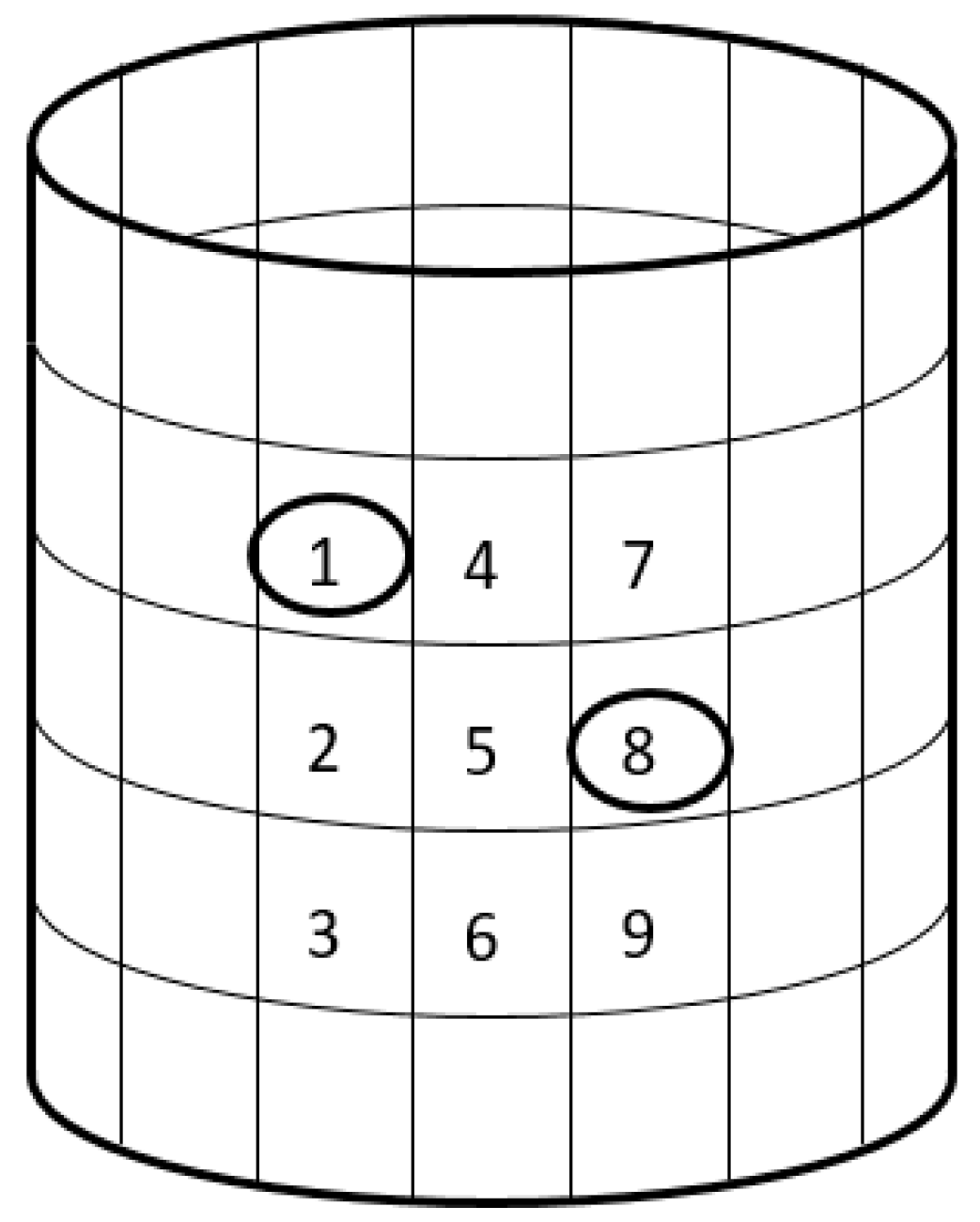
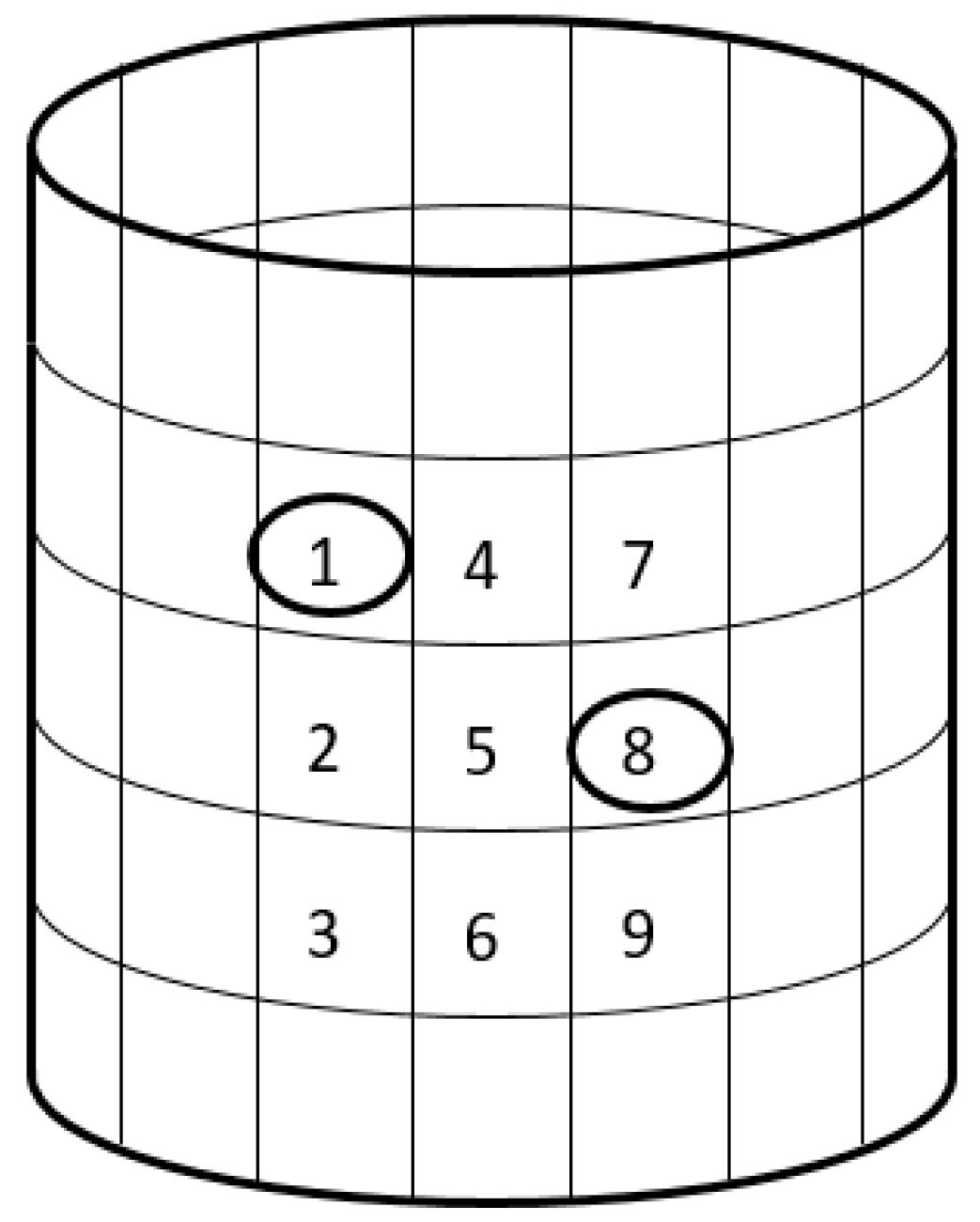
3.2.4. Partition into Substructures
3.2.5. Construction of Virtual Masses
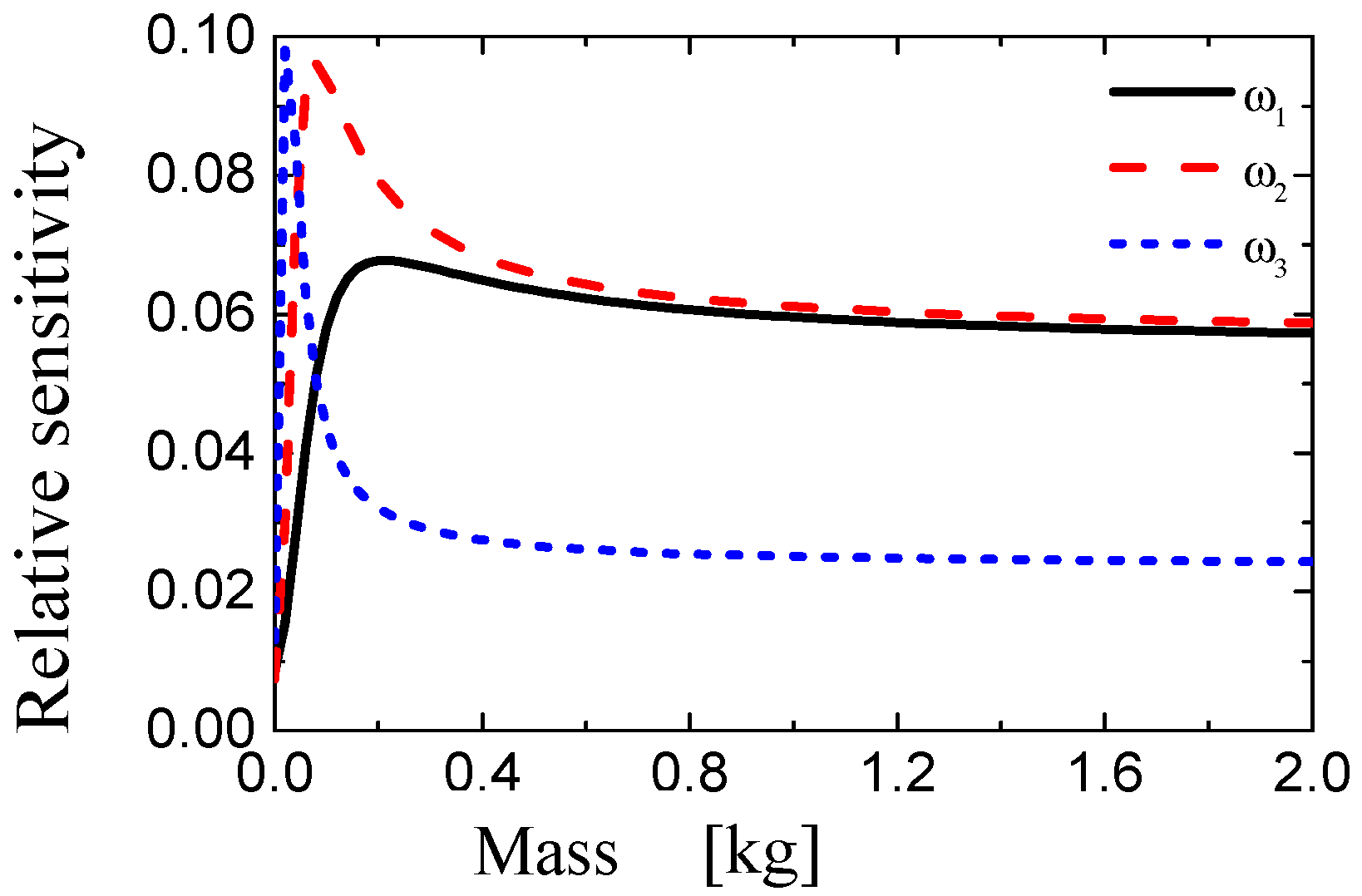
3.2.6. The Relation between Sensitivity and Added Masses
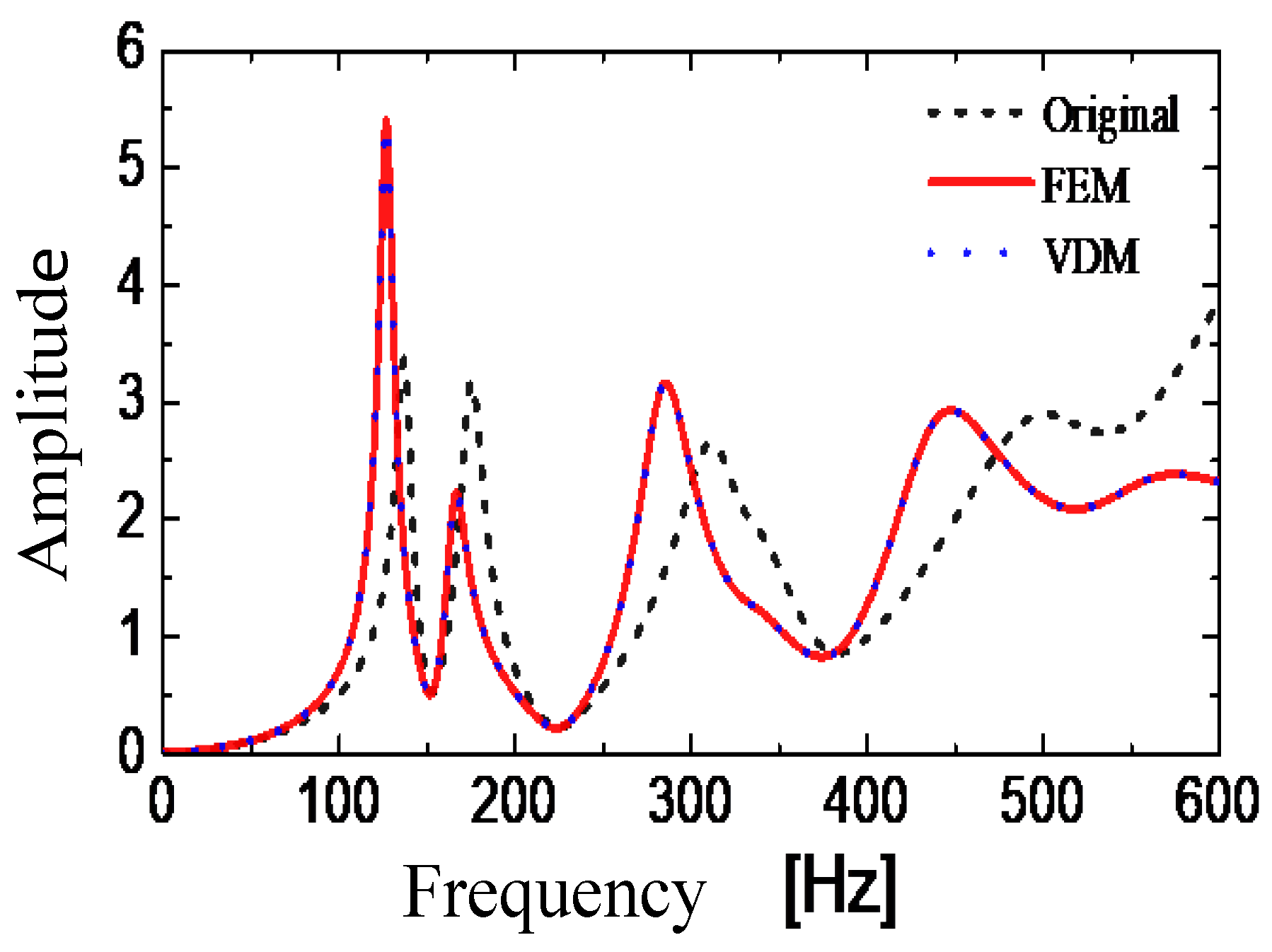
3.3. Verification of Virtual Masses Method
3.4. Damage Identification of the Damaged Storage Tank
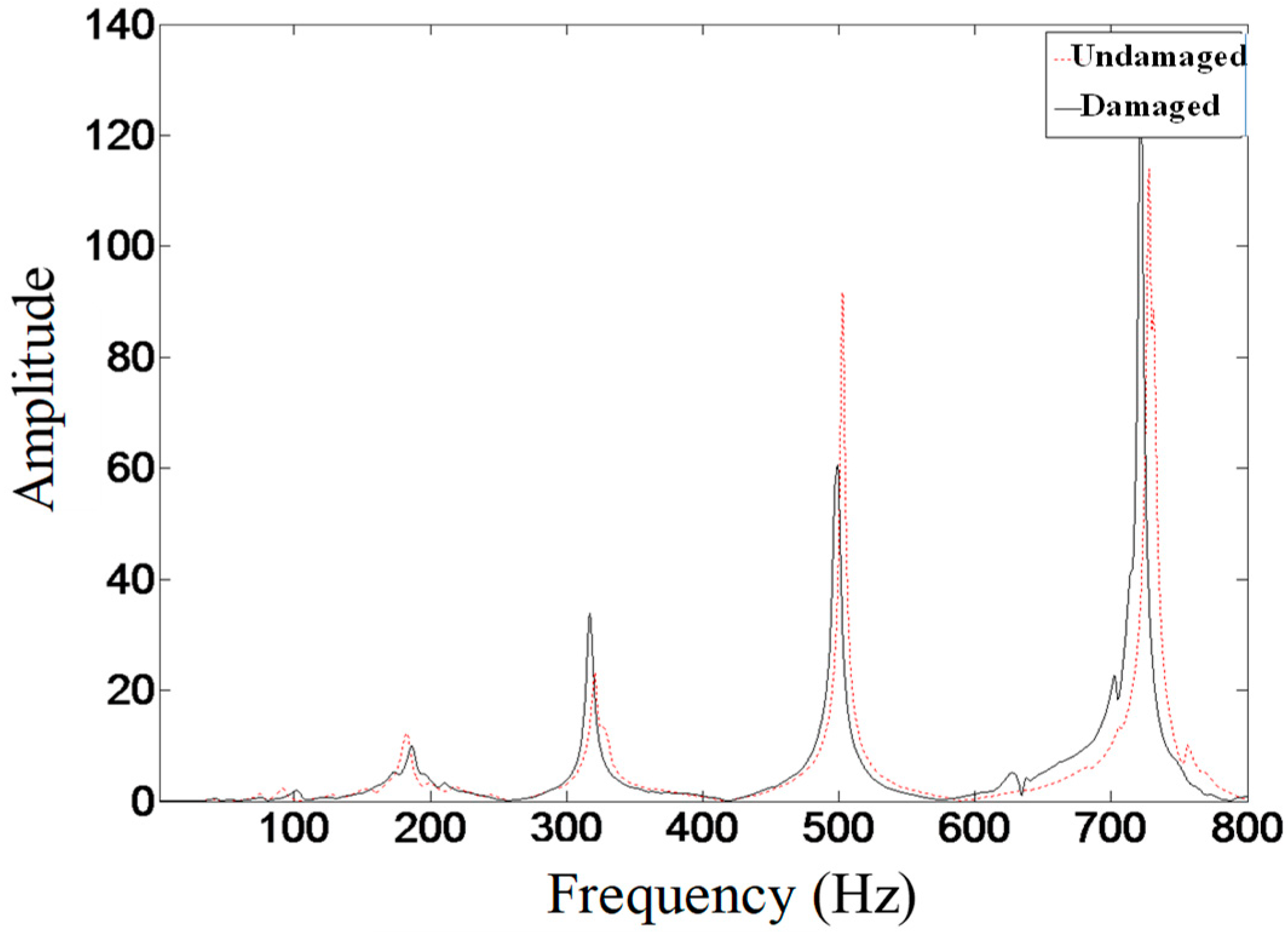
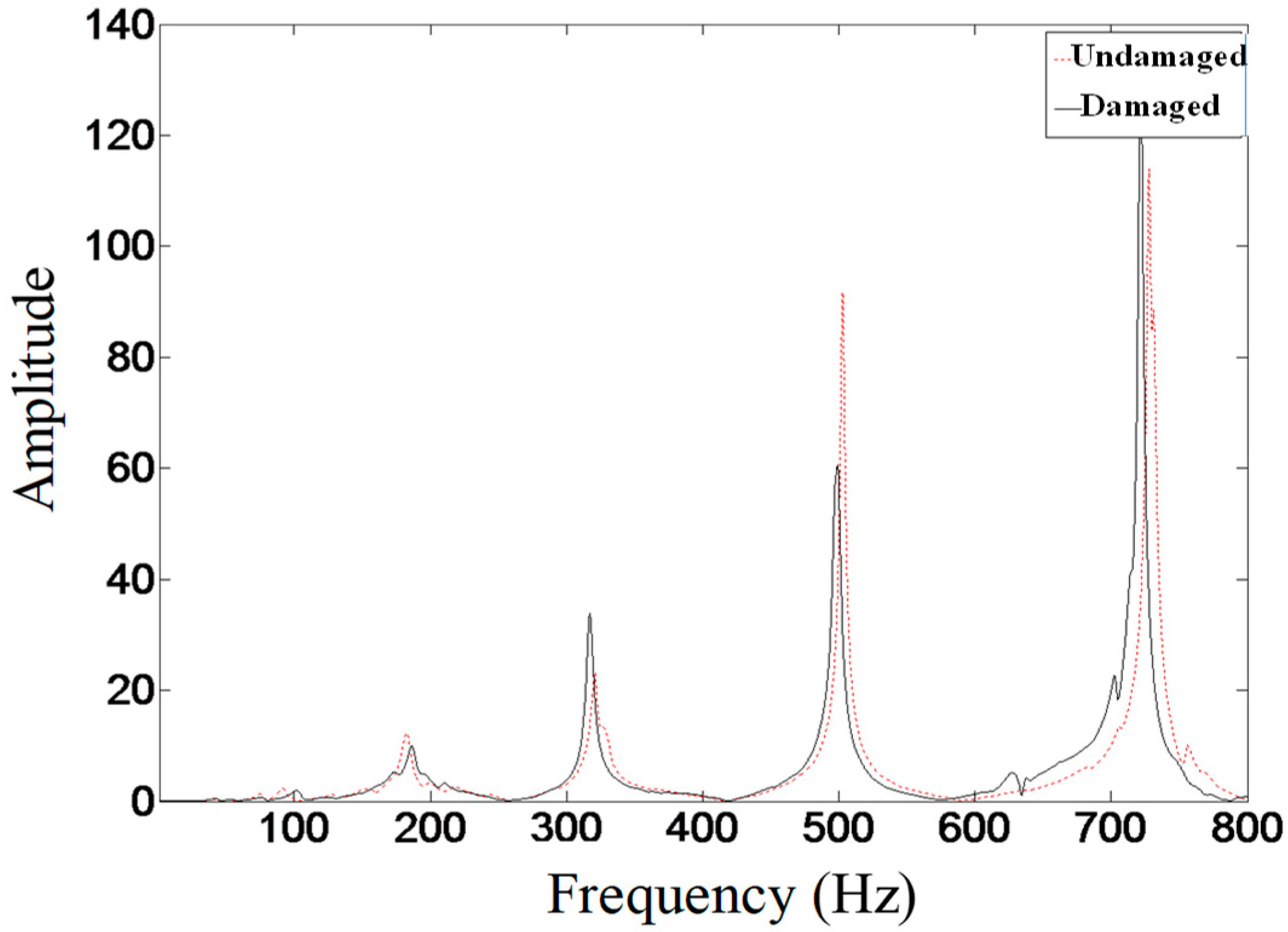
3.4.1. The Comparison of Structural Frequency before and after Damage
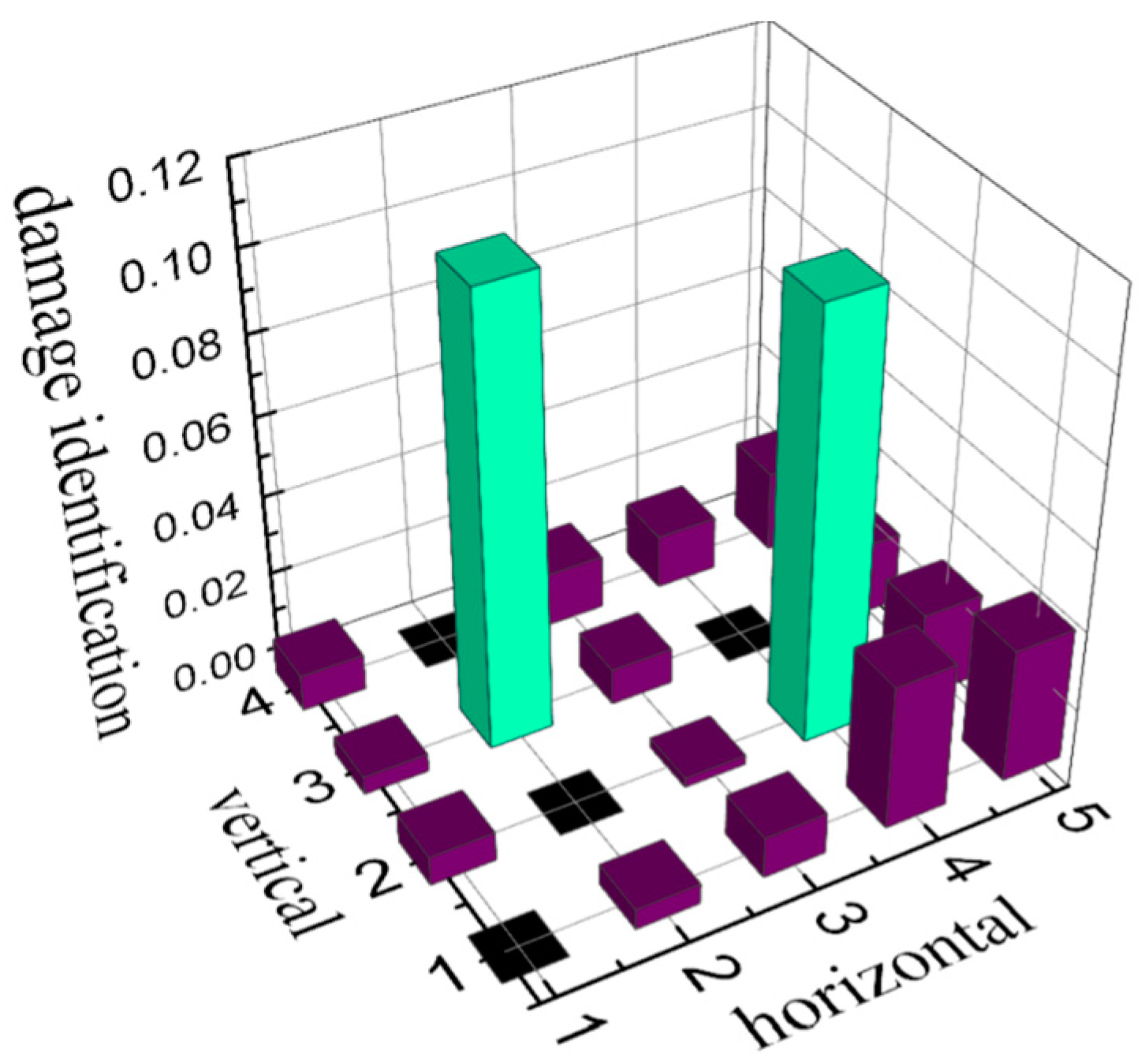
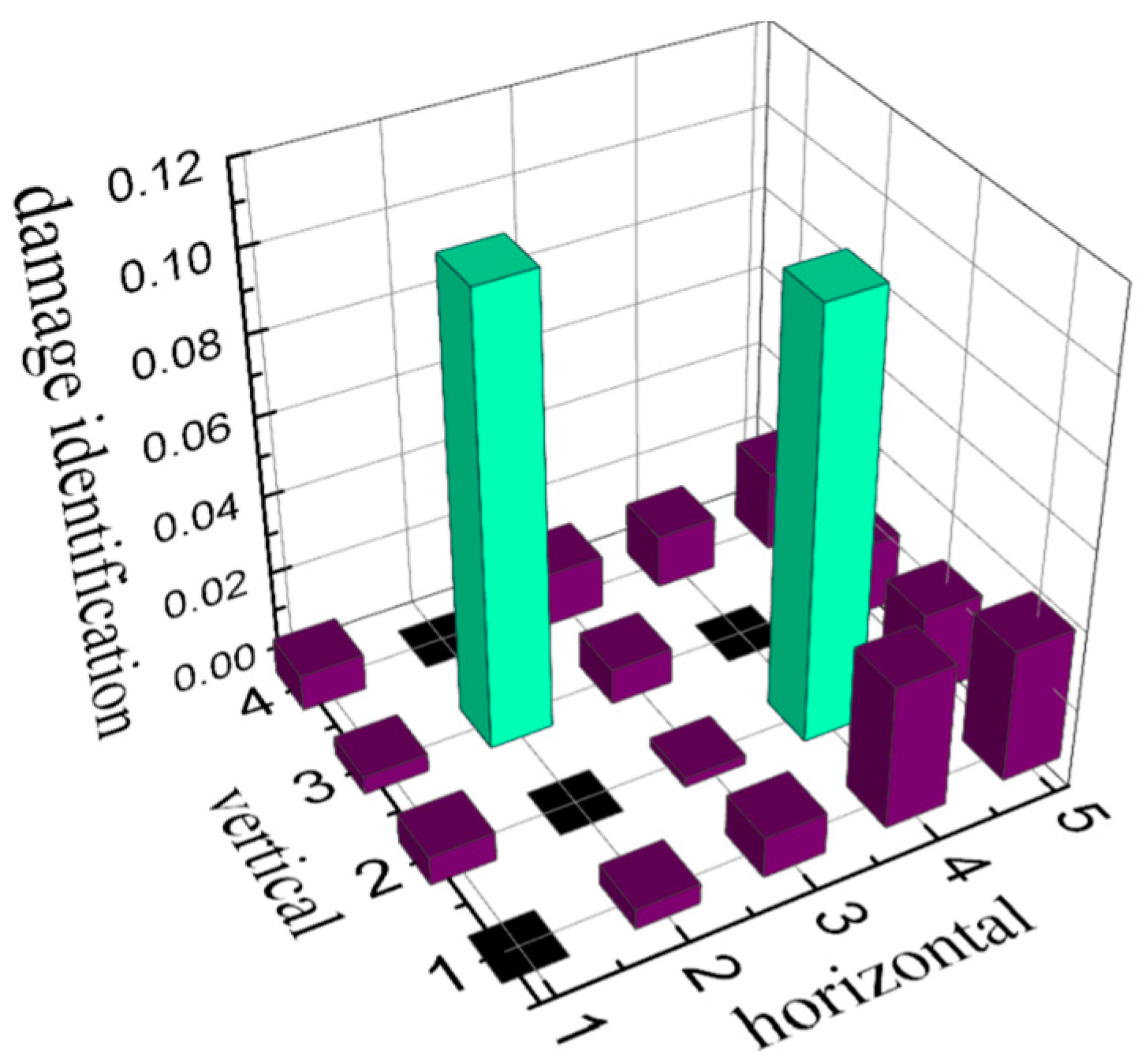
3.4.2. Localization of Damage
3.4.3. Identification of Damage Degree
4. Conclusions
- (1)
- By adding virtual masses to the tank, the modal characteristics of the tank are changed. The frequency information with a high sensitivity to local damage can be obtained and the amount of test modal data can be increased.
- (2)
- Based on the basic theory of the VDM, the frequency response of the tank with an arbitrary mass added is constructed by employing only a single pair of the excitation and acceleration responses of the original structure, which further increases the flexibility and applicability of the method.
- (3)
- A set of frequency responses can be obtained by sequentially adding a virtual mass to each substructure of the tank structure. The damage location can be determined by comparing the selected natural frequencies of the substructures at the same height, without any FE model. Finally, the accurate damage factors of substructures can be quantitatively identified by a sensitivity-based optimization that employs a numerical FE model. The feasibility of the approach in practical engineering has been verified.
Author Contributions
Funding
Conflicts of Interest
References
- Hu, W.H.; Tang, D.H.; Teng, J.; Said, S.; Rohrmann, R.G. Structural Health Monitoring of a Prestressed Concrete Bridge Based on Statistical Pattern Recognition of Continuous Dynamic Measurements over 14 years. Sensors 2018, 18, 4117. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhang, L.; Liu, L.; Huo, L. Prestress Monitoring of a Steel Strand in an Anchorage Connection Using Piezoceramic Transducers and Time Reversal Method. Sensors 2018, 18, 4018. [Google Scholar] [CrossRef] [PubMed]
- Jiang, T.; Zhang, Y.; Wang, L.; Zhang, L.; Song, G. Monitoring Fatigue Damage of Modular Bridge Expansion Joints Using Piezoceramic Transducers. Sensors 2018, 18, 3973. [Google Scholar] [CrossRef] [PubMed]
- Shen, S.; Jiang, S.F. Distributed Deformation Monitoring for a Single-Cell Box Girder Based on Distributed Long-Gage Fiber Bragg Grating Sensors. Sensors 2018, 18, 2597. [Google Scholar] [CrossRef] [PubMed]
- Na, W.S.; Seo, D.W.; Kim, B.C.; Park, K.T. Effects of Applying Different Resonance Amplitude on the Performance of the Impedance-Based Health Monitoring Technique Subjected to Damage. Sensors 2018, 18, 2267. [Google Scholar] [CrossRef]
- Pan, S.; Xu, Z.; Li, D.; Lu, D. Research on Detection and Location of Fluid-Filled Pipeline Leakage Based on Acoustic Emission Technology. Sensors 2018, 18, 3628. [Google Scholar] [CrossRef]
- Xu, K.; Deng, Q.; Cai, L.; Ho, S.; Song, G. Damage Detection of a Concrete Column Subject to Blast Loads Using Embedded Piezoceramic Transducers. Sensors 2018, 18, 1377. [Google Scholar] [CrossRef]
- Feng, Q.; Ou, J. Self-Sensing CFRP Fabric for Structural Strengthening and Damage Detection of Reinforced Concrete Structures. Sensors 2018, 18, 4137. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Xu, J.; Guan, W.; Du, G. Damage Detection of Concrete-Filled Square Steel Tube (CFSST) Column Joints under Cyclic Loading Using Piezoceramic Transducers. Sensors 2018, 18, 3266. [Google Scholar] [CrossRef]
- Fan, S.; Zhao, S.; Qi, B.; Kong, Q. Damage Evaluation of Concrete Column under Impact Load Using a Piezoelectric-Based EMI Technique. Sensors 2018, 18, 1591. [Google Scholar] [CrossRef]
- Chen, Y.; Yin, P. Technical Method of X-ray Detection to Improve Efficiency of LNG Tank Detection. China Chem. Ind. Equip. 2014. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Y.; Sun, D. Studies on the construction of storage tank acoustic emission online detection device and its application in the practice. Xinjiang Oil Gas 2014, 221, 778–788. [Google Scholar]
- Wang, J.; Huo, L.; Liu, C.; Song, G. Wear Degree Quantification of Pin Connections Using Parameter-Based Analyses of Acoustic Emissions. Sensors 2018, 18, 3503. [Google Scholar] [CrossRef] [PubMed]
- Di, B.; Wang, J.; Li, H.; Zheng, J.; Zheng, Y.; Song, G. Investigation of Bonding Behavior of FRP and Steel Bars in Self-Compacting Concrete Structures Using Acoustic Emission Method. Sensors 2019, 19, 159. [Google Scholar] [CrossRef]
- Lowe, P.S.; Duan, W.; Kanfoud, J.; Gan, T.H. Structural Health Monitoring of Above-Ground Storage Tank Floors by Ultrasonic Guided Wave Excitation on the Tank Wall. Sensors 2017, 17, 2542. [Google Scholar] [CrossRef] [PubMed]
- Yan, S.; Zhang, B.; Song, G.; Lin, J. PZT-Based Ultrasonic Guided Wave Frequency Dispersion Characteristics of Tubular Structures for Different Interfacial Boundaries. Sensors 2018, 18, 4111. [Google Scholar] [CrossRef]
- Zhao, G.; Zhang, D.; Zhang, L.; Wang, B. Detection of Defects in Reinforced Concrete Structures Using Ultrasonic Nondestructive Evaluation with Piezoceramic Transducers and the Time Reversal Method. Sensors 2018, 18, 4176. [Google Scholar] [CrossRef]
- Altammar, H.; Dhingra, A.; Salowitz, N. Ultrasonic Sensing and Actuation in Laminate Structures Using Bondline-Embedded d35 Piezoelectric Sensors. Sensors 2018, 18, 3885. [Google Scholar] [CrossRef]
- Jie, C.; Tian, Y.T.; Zhao, K.M.; Wu., X.J.; Li, T.; Gao, L.Y. Magnetic Flux Leakage Detector Driven by In-wheel Motor for Tank Floor Plate. Control Instrum. Chem. Ind. 2017. [Google Scholar] [CrossRef]
- Yu, Z.; Wang, T.; Zhou, M. Study on the Magnetic-machine Coupling Characteristics of Giant Magnetostrictive Actuator Based on the Free Energy Hysteresis Characteristics. Sensors 2018, 18, 3070. [Google Scholar] [CrossRef]
- Tajima, N.; Yusa, N.; Hashizume, H. Application of low-frequency eddy current testing to the inspection of a double-walled tank in a reprocessing plant. Nondestruct. Test. Eval. 2018, 33, 189–197. [Google Scholar] [CrossRef]
- Peng, J.; Hu, S.; Zhang, J.; Cai, C.; Li, L. Influence of cracks on chloride diffusivity in concrete: A five-phase mesoscale model approach. Constr. Build. Mater. 2019, 197, 587–596. [Google Scholar] [CrossRef]
- Zhang, H.; Hou, S.; Ou, J. Validation of Finite Element Model by Smart Aggregate-Based Stress Monitoring. Sensors 2018, 18, 4062. [Google Scholar] [CrossRef] [PubMed]
- Guan, H.; Karbhari, V.M. Improved damage detection method based on Element Modal Strain Damage Index using sparse measurement. J. Sound Vib. 2008, 309, 465–494. [Google Scholar] [CrossRef]
- Li, Y.; Xiang, Z.; Zhou, M.; Cen, Z. Optimal sensor placement for mode-shape based damage identification on bridges. J. Tsinghua Univ. 2010, 50, 312–315. [Google Scholar]
- Liu, S.; Zhang, L.; Chen, Z.; Zhou, J.; Zhu, C. Mode-specific damage identification method for reinforced concrete beams: Concept, theory and experiments. Construct. Build. Mater. 2016, 124, 1090–1099. [Google Scholar] [CrossRef]
- Samir, K.; Brahim, B.; Capozucca, R.; Wahab, M.A. Damage detection in CFRP composite beams based on vibration analysis using proper orthogonal decomposition method with radial basis function and Cuckoo Search algorithm. Compos. Struct. 2018, 187, 344–353. [Google Scholar] [CrossRef]
- Khatir, S.; Wahab, M.A. Fast simulations for solving fracture mechanics inverse problems using POD-RBF XIGA and Jaya algorithm. Eng. Fract. Mech. 2019, 205, 285–300. [Google Scholar] [CrossRef]
- Tiachacht, S.; Bouazzouni, A.; Khatir, S.; Wahab, A.M.; Behtani, A.; Capozucca, R. Damage assessment in structures using combination of a modified Cornwell indicator and genetic algorithm. Eng. Struct. 2018, 177, 421–430. [Google Scholar] [CrossRef]
- Khatir, S.; Dekemele, K.; Loccufier, M.; Khatir, T.; Wahab, A.M. Crack identification method in beam-like structures using changes in experimentally measured frequencies and Particle Swarm Optimization. C. R. Mecanique 2018, 346, 110–120. [Google Scholar] [CrossRef]
- Wang, S.; Long, X.; Luo, H.; Zhu, H. Damage Identification for Underground Structure Based on Frequency Response Function. Sensors 2018, 18, 3033. [Google Scholar] [CrossRef] [PubMed]
- Kolakowski, P.; Zielinski, T.G.; Holnicki-Szulc, J. Damage Identification by the Dynamic Virtual Distortion Method. J. Intell. Mater. Syst. Struct. 2004, 15, 479–493. [Google Scholar] [CrossRef]
- Kołakowski, P.; Wikło, M.; Holnicki-Szulc, J. The virtual distortion method—A versatile reanalysis tool for structures and systems. Struct. Multidiscipl. Optim. 2007, 36, 217–234. [Google Scholar] [CrossRef]
- Dackermann, U.; Li, J.; Samali, B. Identification of added mass on a two-storey framed structure utilising frequency response functions and artificial neural networks. In Proceedings of the Australasian Conference on the Mechanics of Structures and Materials, Melbourne, Australia, 7–10 December 2010. [Google Scholar]
- Suwala, G.; Jankowski, Ł. A model-free method for identification of mass modifications. Struct. Control Health Monit. 2012, 19, 216–230. [Google Scholar] [CrossRef]
- Lu, P.; Wang, L.; Duan, J.; Zhang, Z. Influencing factors of beam structure damage identification based on additional mass. Jiefangjun Ligong Daxue Xuebao/J. Pla Univ. Sci. Technol. 2017, 18, 295–301. [Google Scholar]
- Hou, J.; Jankowski, Ł.; Ou, J. Structural damage identification by adding virtual masses. Struct. Multidiscipl. Optim. 2013, 48, 59–72. [Google Scholar] [CrossRef]
- Hou, J.; An, Y.; Wang, S.; Wang, Z.; Jankowski, Ł.; Ou, J. Structural Damage Localization and Quantification based on Additional Virtual Masses and Bayesian Theory. ASCE J. Eng. Mech. 2018, 144, 04018097. [Google Scholar] [CrossRef]
- Brancati, R.; Rocca, E.; Siano, D.; Viscardi, M. Experimental vibro-acoustic analysis of the gear rattle induced by multi-harmonic excitation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 232, 785–796. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | 1 | 2 | 3 |
|---|---|---|---|
| Frequency | 330.71 | 526.86 | 739.38 |
| Order of Frequency | 1 | 2 | 3 |
|---|---|---|---|
| Original | 330.71 | 526.86 | 739.38 |
| Modified | 316.12 | 503.36 | 727.79 |
| Experimental value | 320.83 | 502.05 | 720.19 |
| Error | 1.47% | 0.26% | 1.06% |
| Mass | Type | S1,2 | S2,2 | S3,2 | S4,2 |
|---|---|---|---|---|---|
| 0.3 kg | VDM | 478.76 | 470.83 | 468.76 | 458.56 |
| True | 472.67 | 470.96 | 474.17 | 456.40 | |
| Error | 1.29% | 0.03% | 1.14% | 0.47% | |
| 0.6 kg | VDM | 413.62 | 439.66 | 454.45 | 448.59 |
| True | 415.55 | 439.09 | 456.21 | 441.19 | |
| Error | 0.46% | 0.13% | 0.39% | 1.68% | |
| 0.9 kg | VDM | 384.45 | 410.05 | 448.20 | 443.42 |
| True | 384.83 | 416.68 | 448.61 | 440.08 | |
| Error | 0.10% | 1.59% | 0.09% | 0.74% |
| Order of Frequency | 1 | 2 | 3 |
|---|---|---|---|
| Undamaged | 320.83 | 502.05 | 720.19 |
| Damaged | 317.16 | 498.27 | 713.22 |
| Difference | 1.14% | 0.75% | 0.98% |
| H1 | H2 | H3 | H4 | H5 | |
|---|---|---|---|---|---|
| V4 | 434.29 | 438.41 | 432.48 | 432.75 | 429.94 |
| V3 | 437.68 | 397.27 | 435.31 | 439.55 | 431.74 |
| V2 | 408.87 | 411.08 | 410.60 | 367.25 | 402.53 |
| V1 | 385.16 | 383.45 | 381.28 | 371.43 | 372.19 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, J.; Wang, P.; Jing, T.; Jankowski, Ł. Experimental Study for Damage Identification of Storage Tanks by Adding Virtual Masses. Sensors 2019, 19, 220. https://doi.org/10.3390/s19020220
Hou J, Wang P, Jing T, Jankowski Ł. Experimental Study for Damage Identification of Storage Tanks by Adding Virtual Masses. Sensors. 2019; 19(2):220. https://doi.org/10.3390/s19020220
Chicago/Turabian StyleHou, Jilin, Pengfei Wang, Tianyu Jing, and Łukasz Jankowski. 2019. "Experimental Study for Damage Identification of Storage Tanks by Adding Virtual Masses" Sensors 19, no. 2: 220. https://doi.org/10.3390/s19020220
APA StyleHou, J., Wang, P., Jing, T., & Jankowski, Ł. (2019). Experimental Study for Damage Identification of Storage Tanks by Adding Virtual Masses. Sensors, 19(2), 220. https://doi.org/10.3390/s19020220