Double-Drum Test Bench for Variable Load Transfer Simulation by Electromechanical Inertia Compensation

Abstract
:1. Introduction
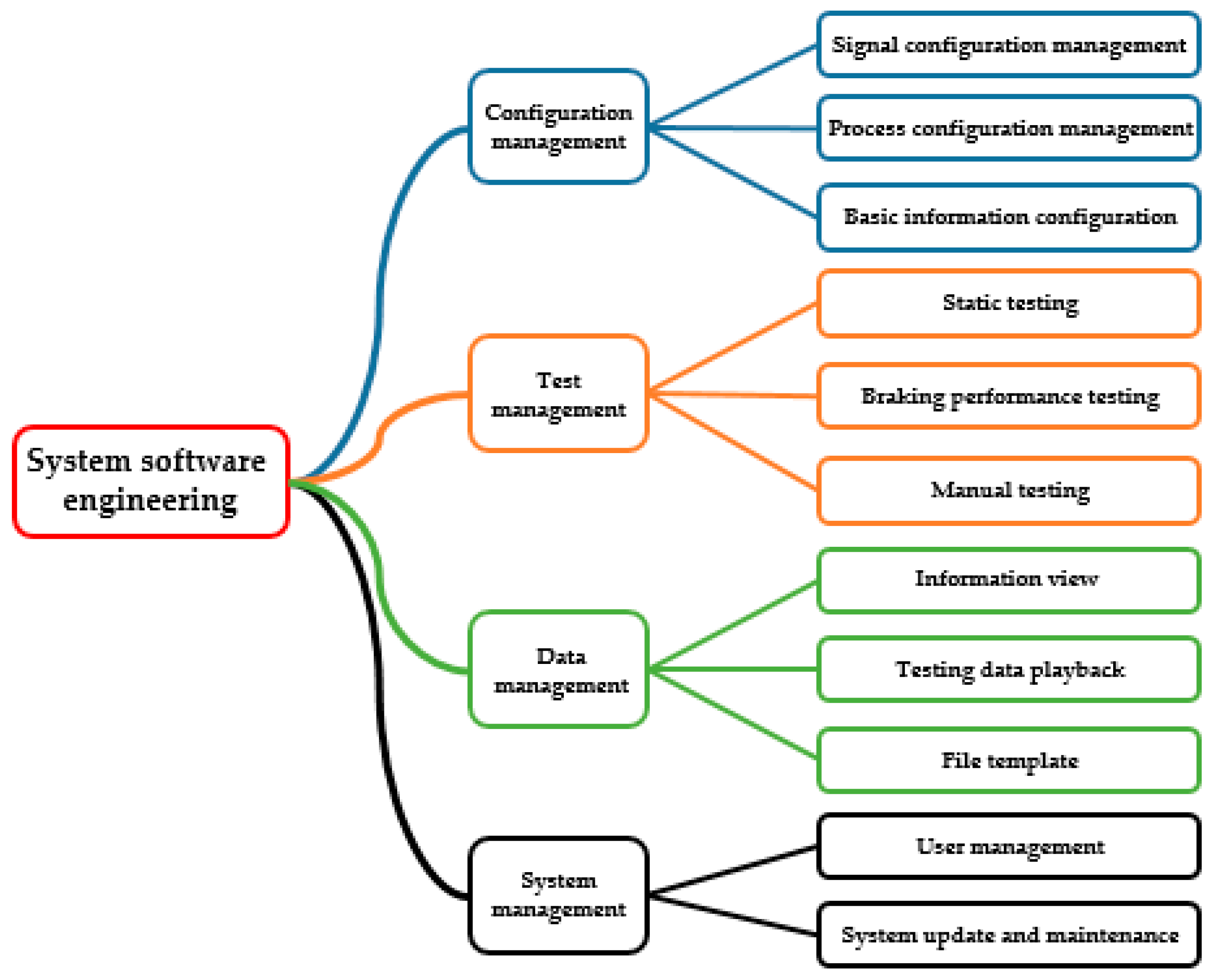
2. Software and Hardware System of Test Bench
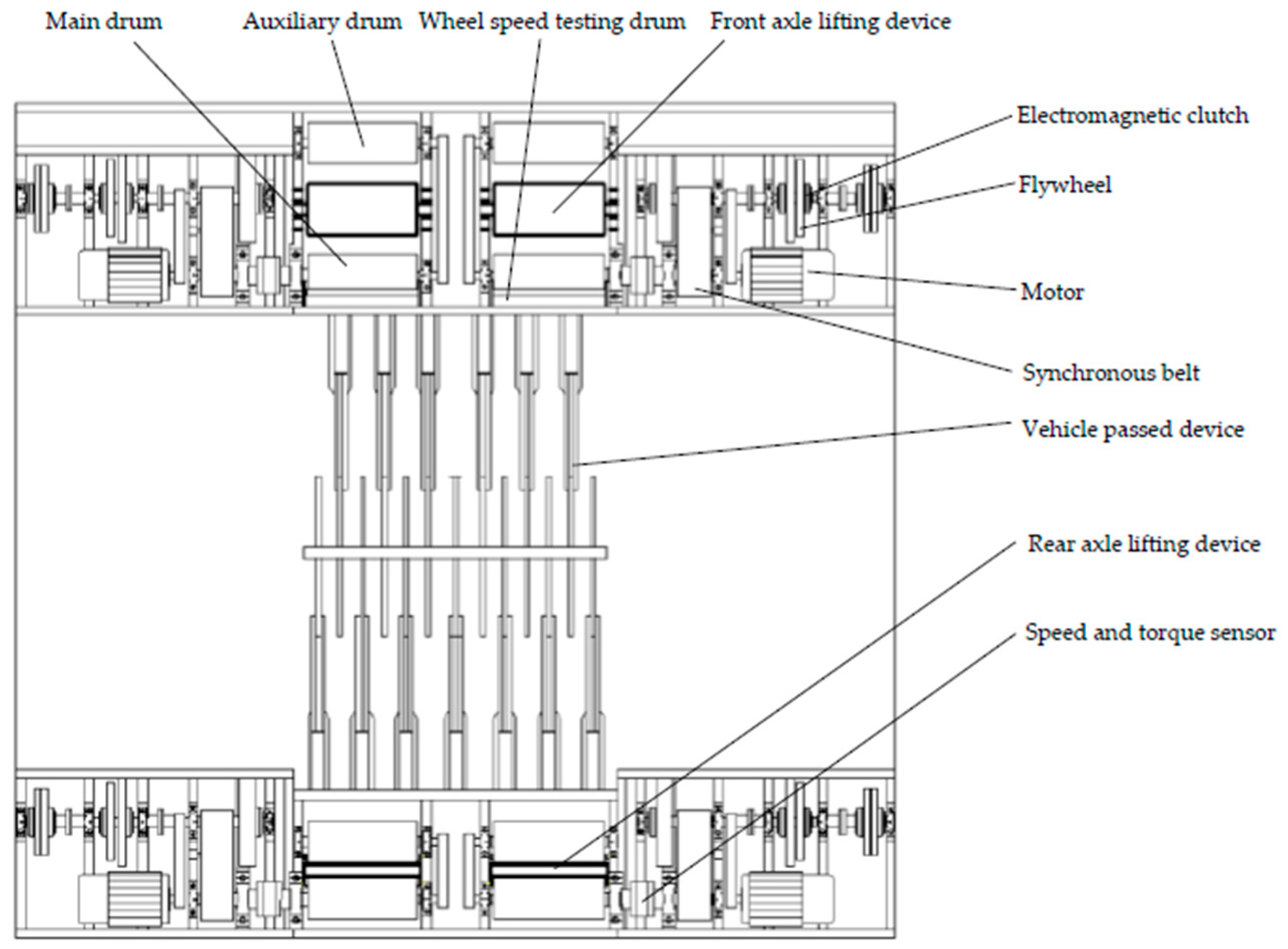
2.1. Hardware Structure of Test Bench
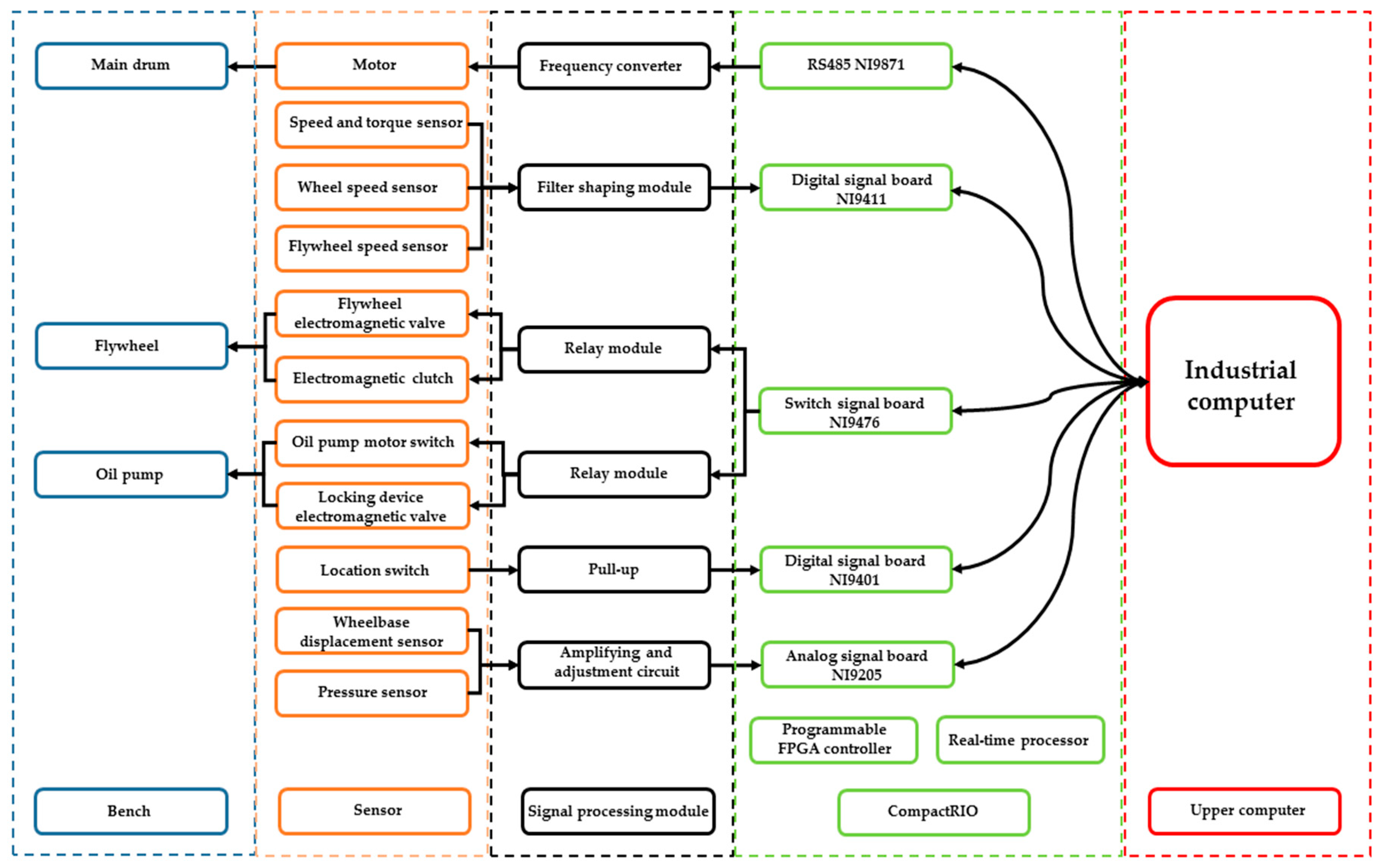
2.2. Measurement and Control System of Test Bench
3. Variable Load Transfer Simulation by Compensation Electromechanical Inertia
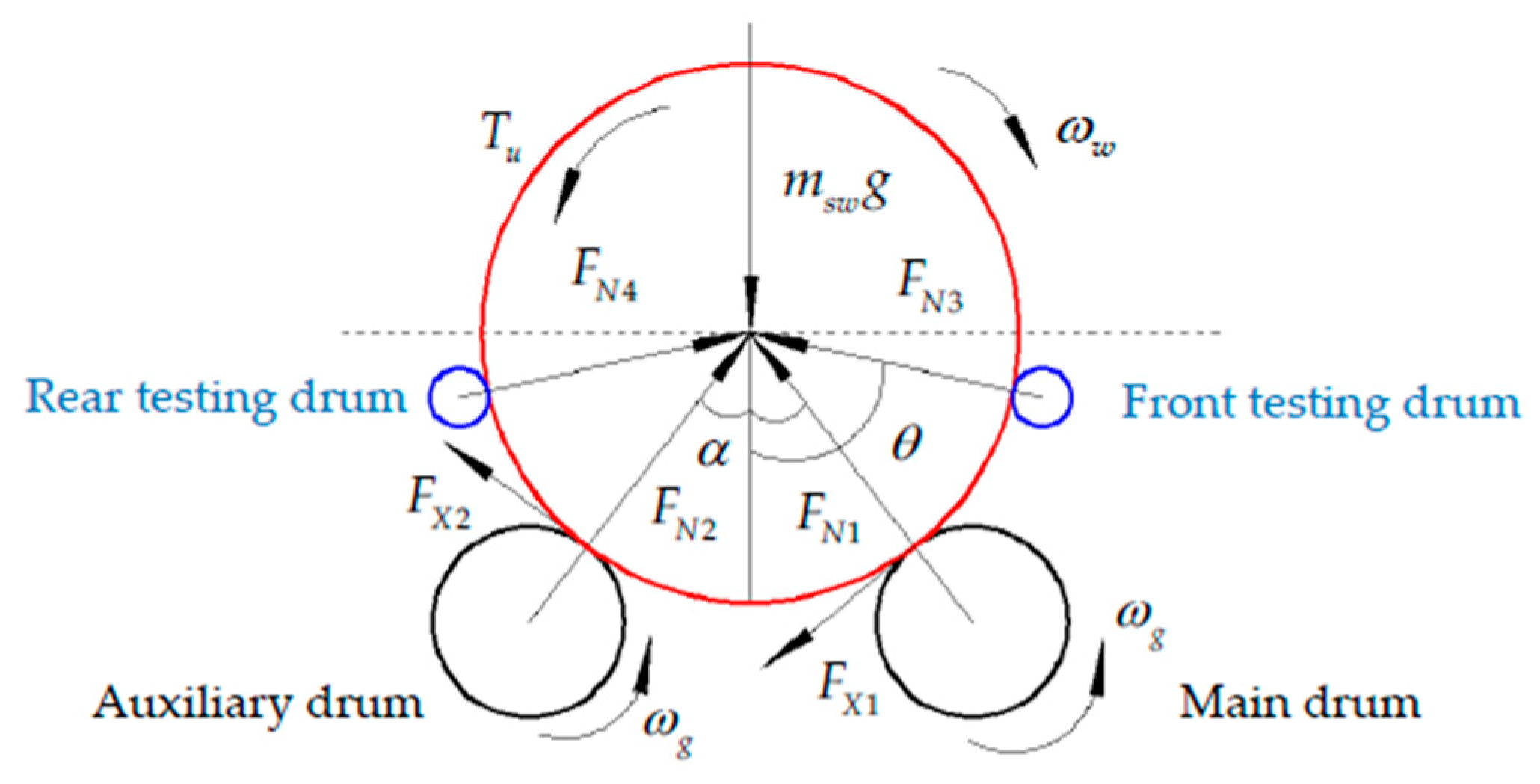
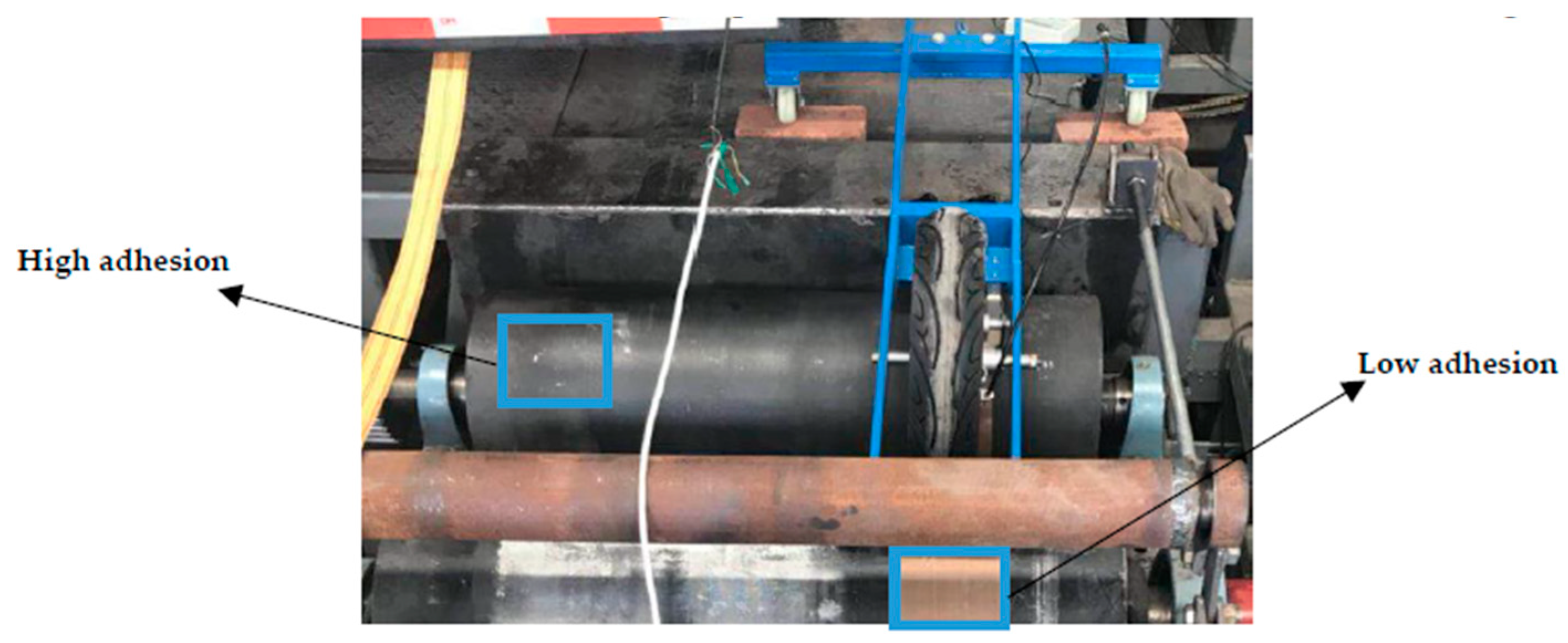
3.1. Variable Adhesion Simulation
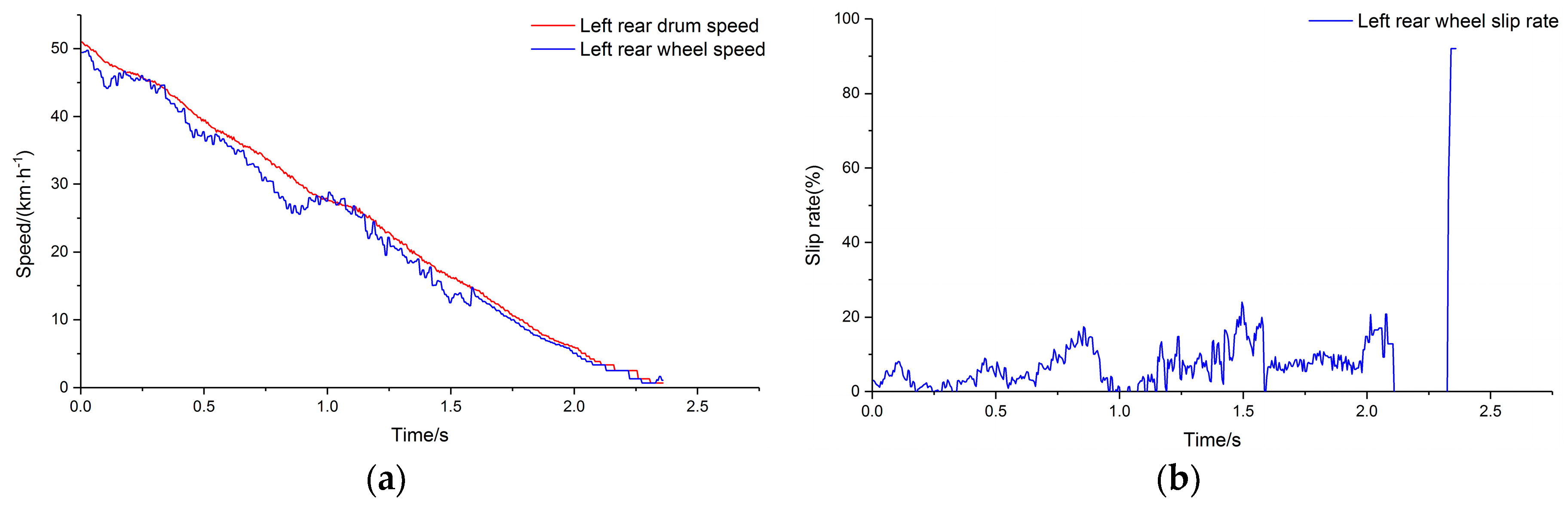
3.1.1. Simulation of Variable Adhesion Condition in Single-Wheel Test
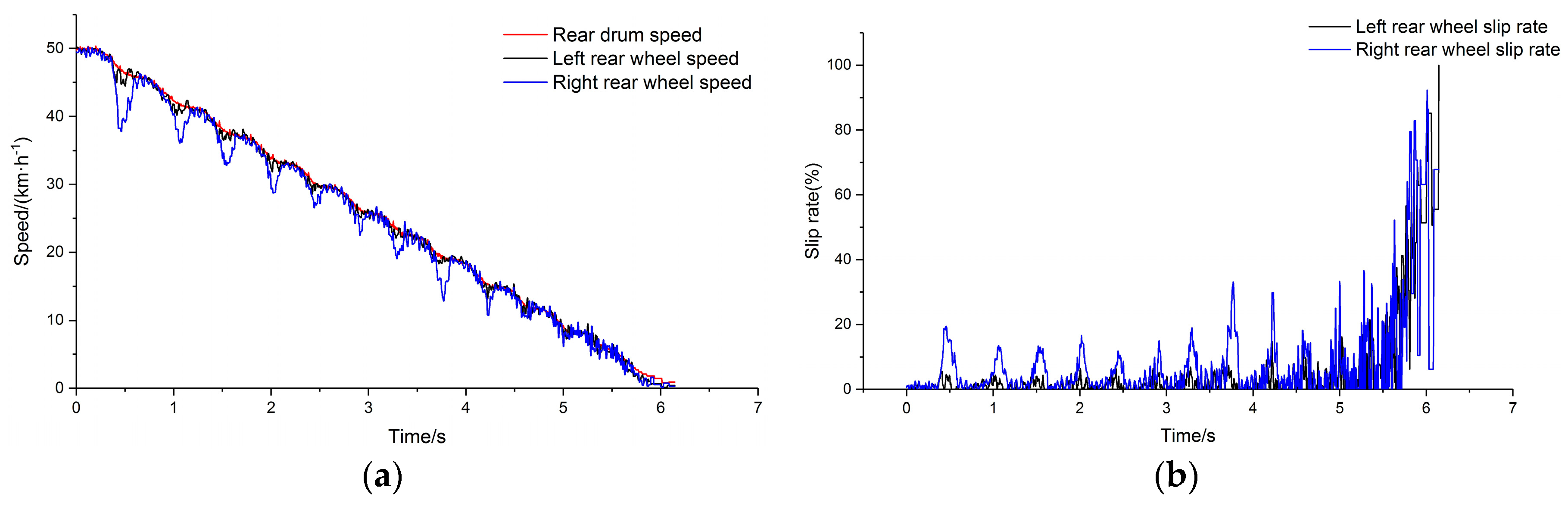
3.1.2. Simulation of Load Transfer during Braking in Vehicle Test
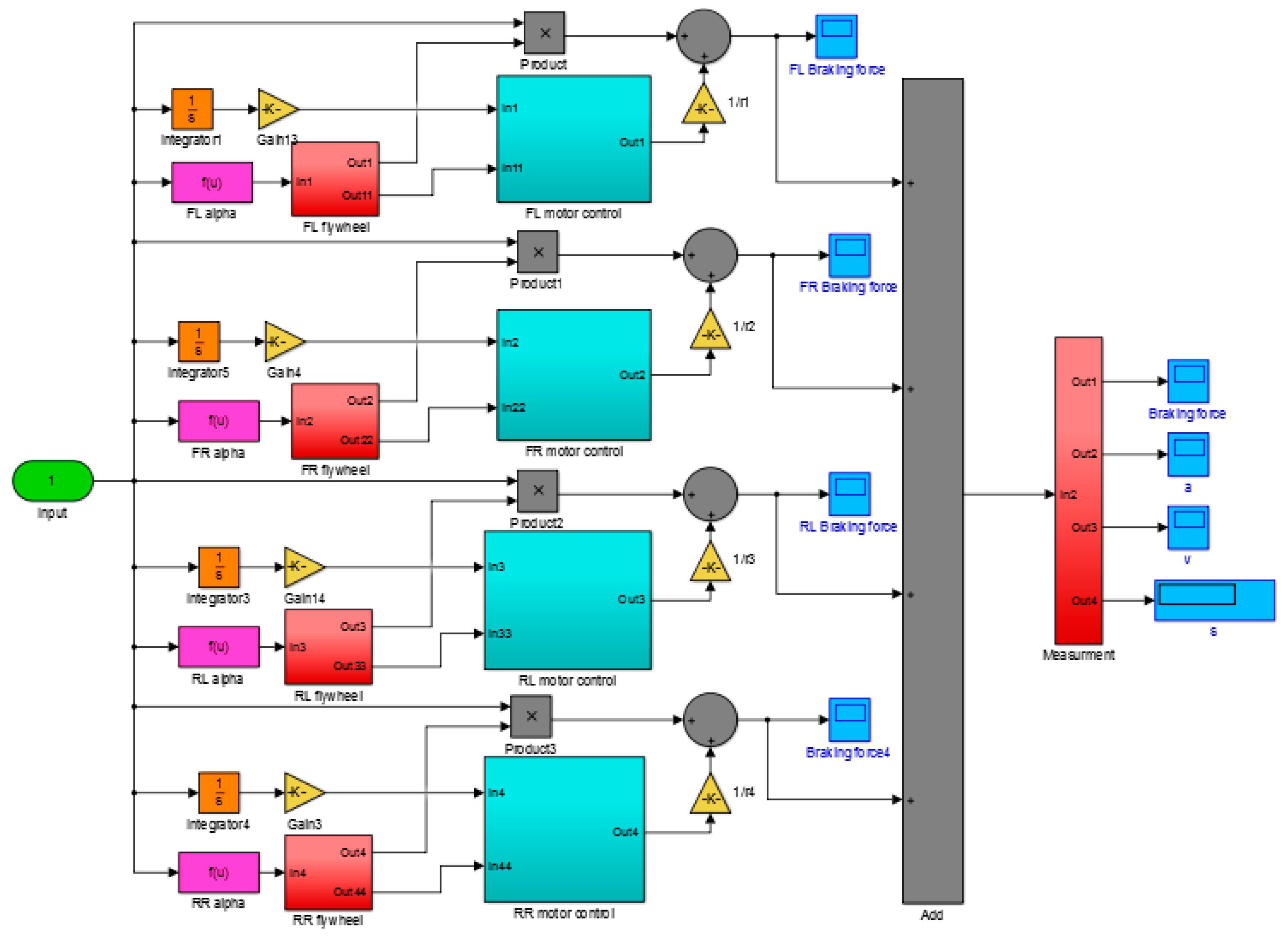
3.2. Electromechanical Inertia Compensation Mechanism
4. Simulation Verification
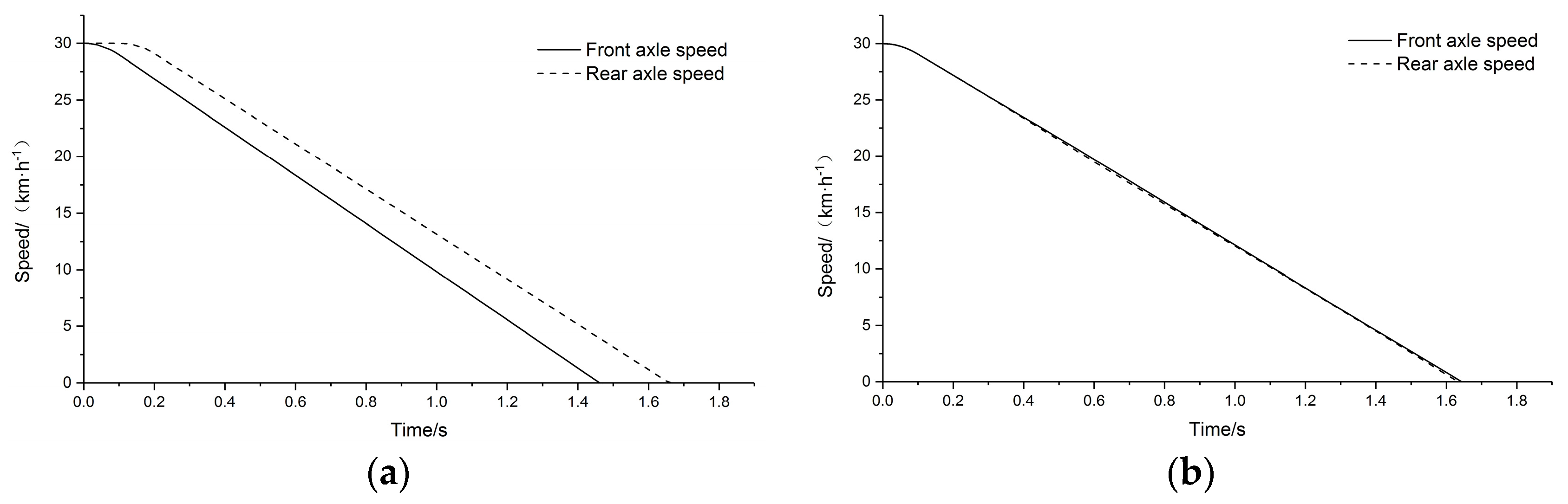
4.1. Conventional Braking Performance Simulation
4.2. ABS Performance Simulation
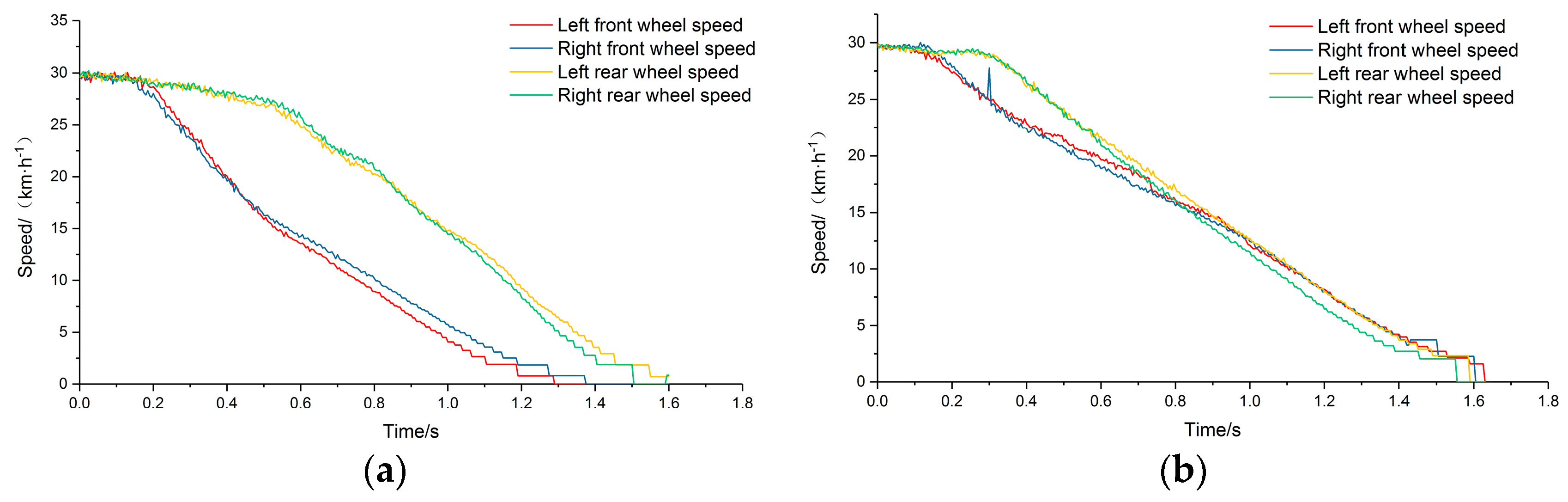
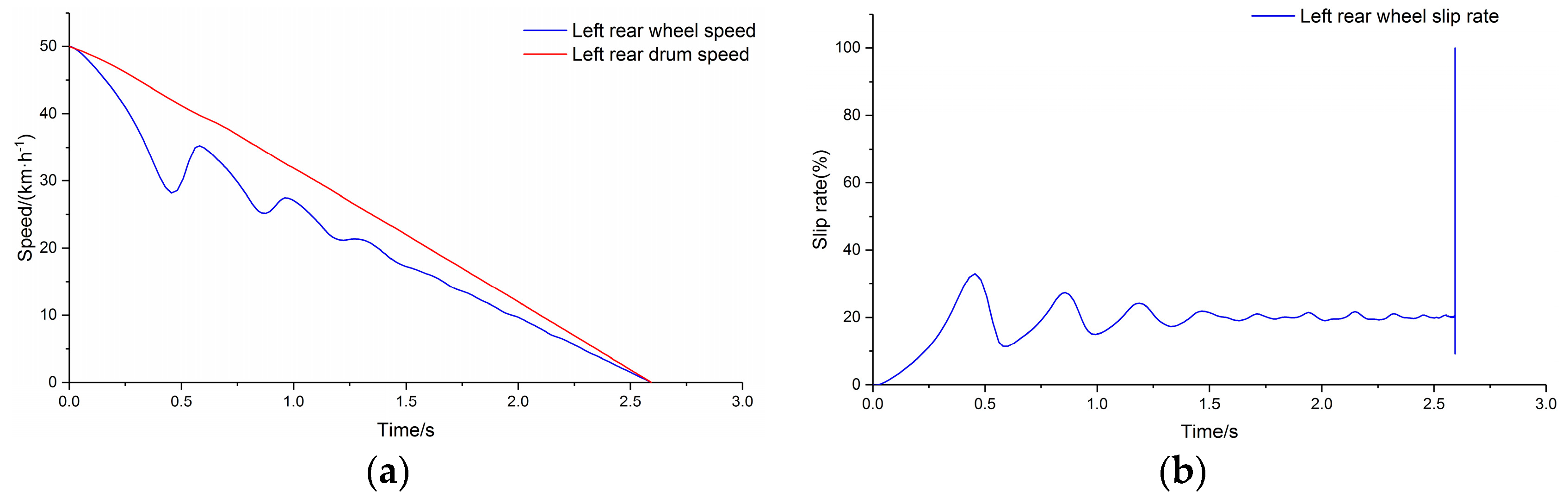
4.2.1. High Adhesion Condition
4.2.2. Bisectional Condition
4.2.3. Low Adhesion Condition
5. Test Bench Verification Test
5.1. Conventional Braking Performance Test
5.2. ABS Performance Test
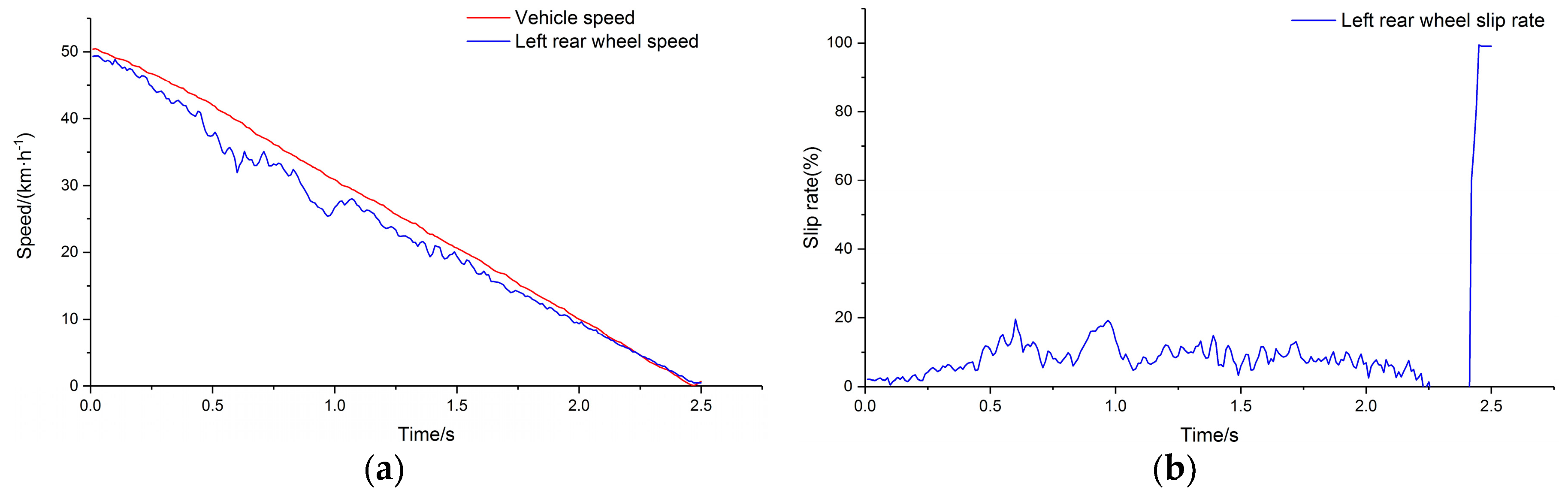
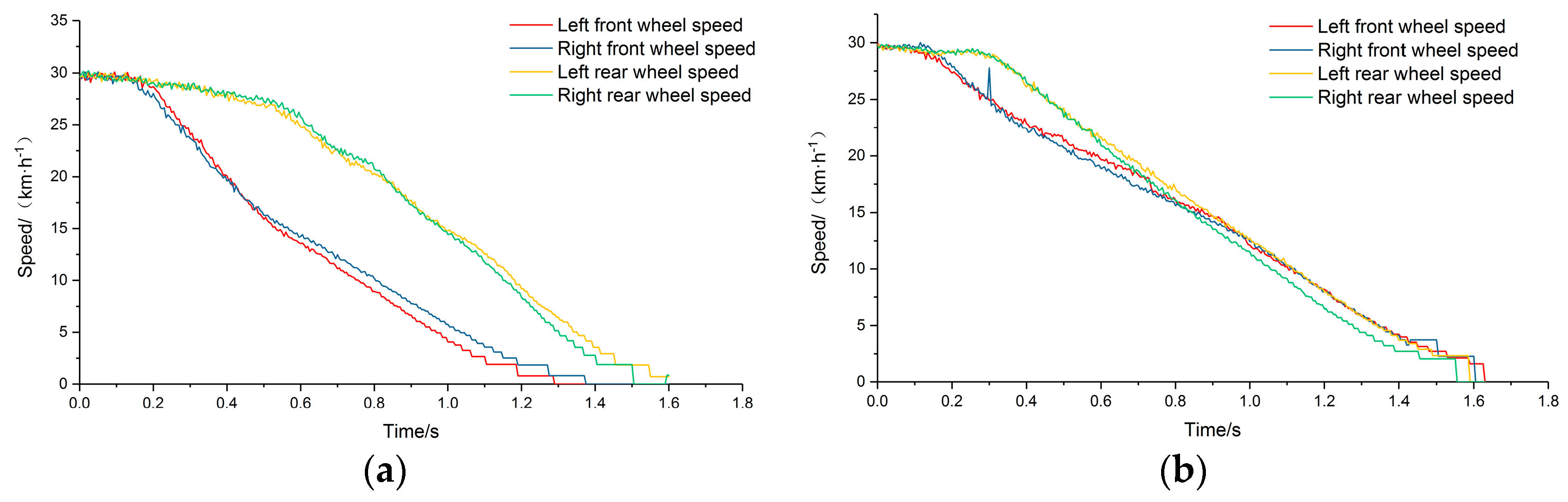
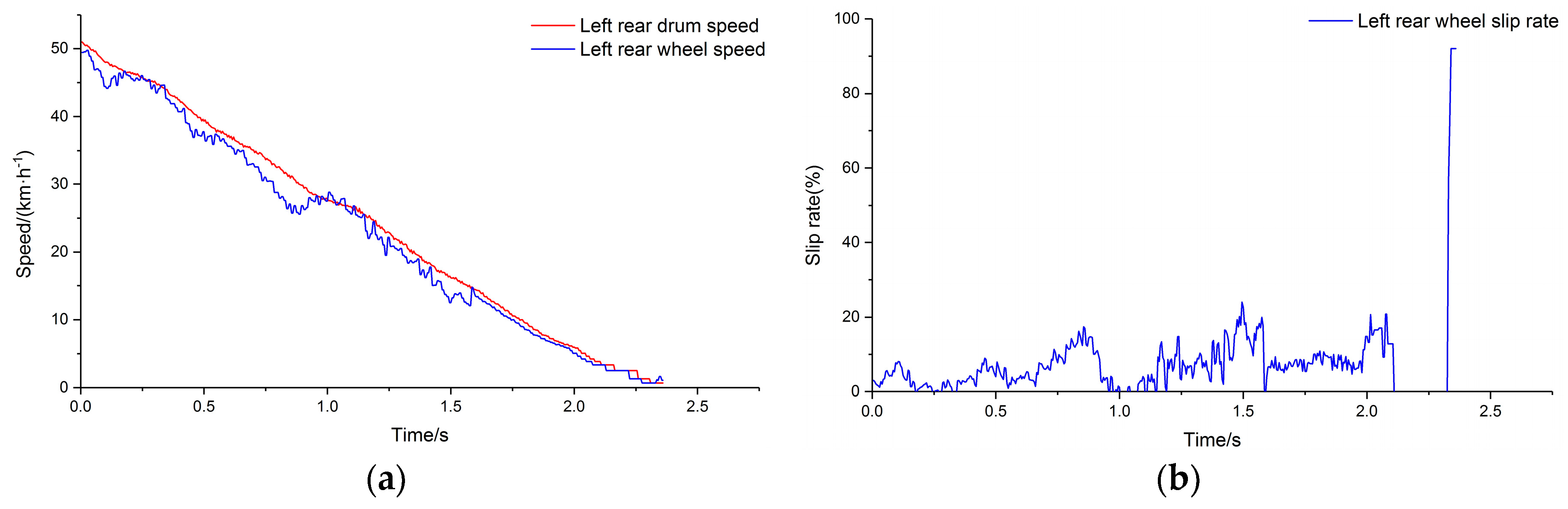
5.2.1. High Adhesion Condition
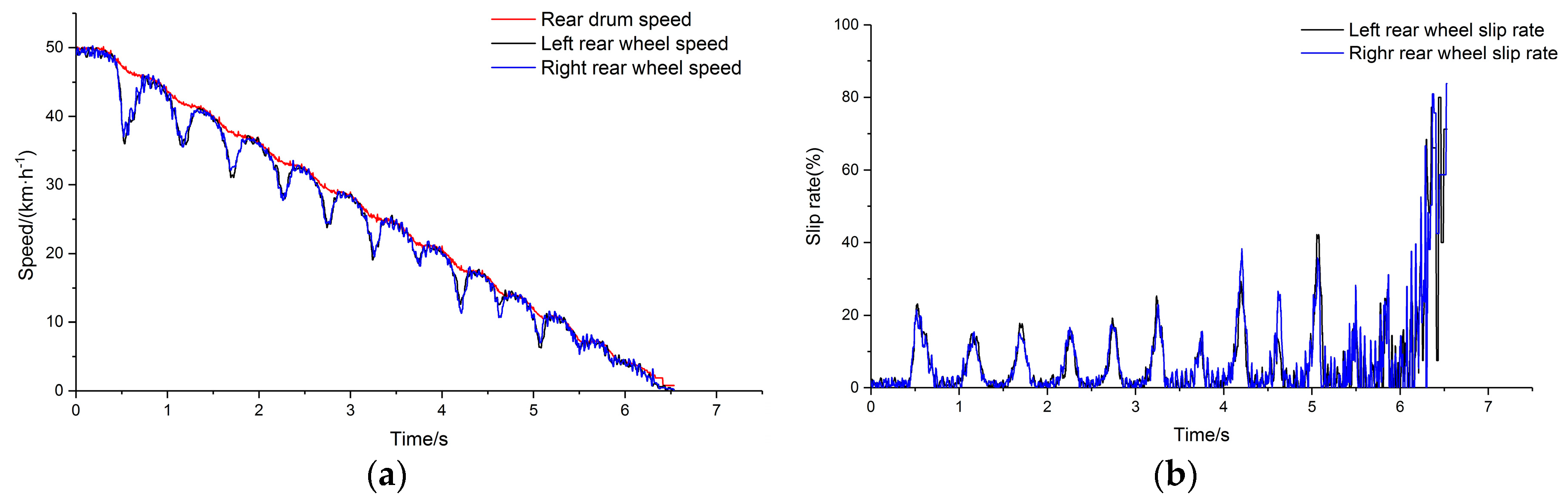
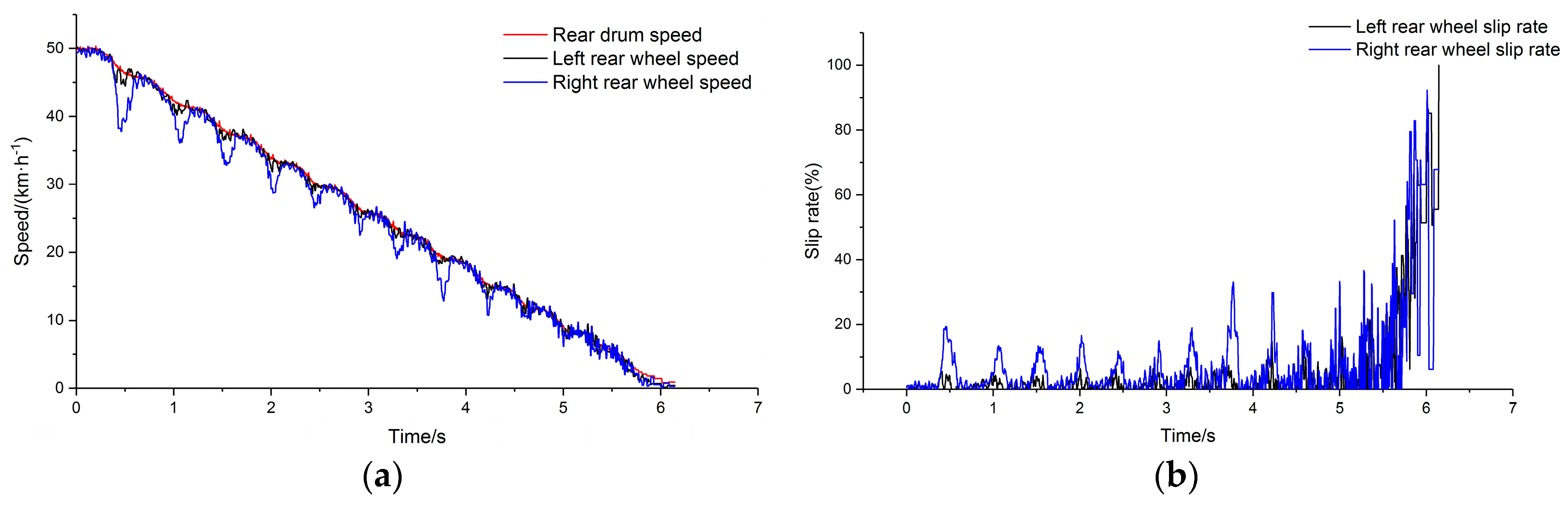
5.2.2. Bisectional Condition
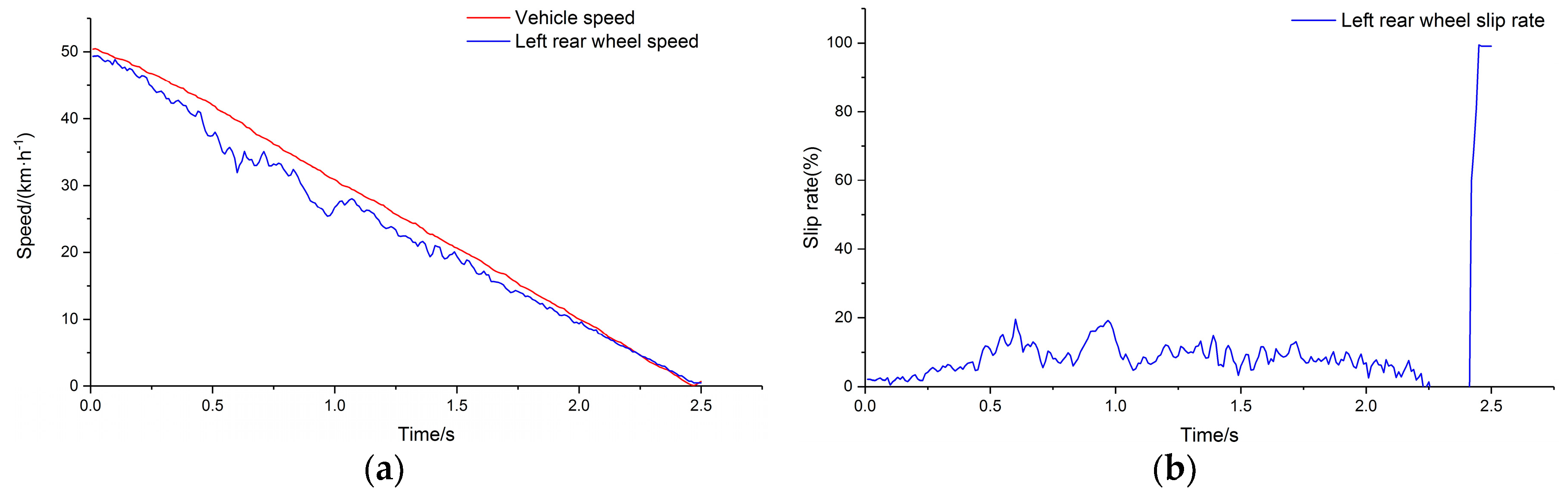
5.2.3. Low Adhesion Condition
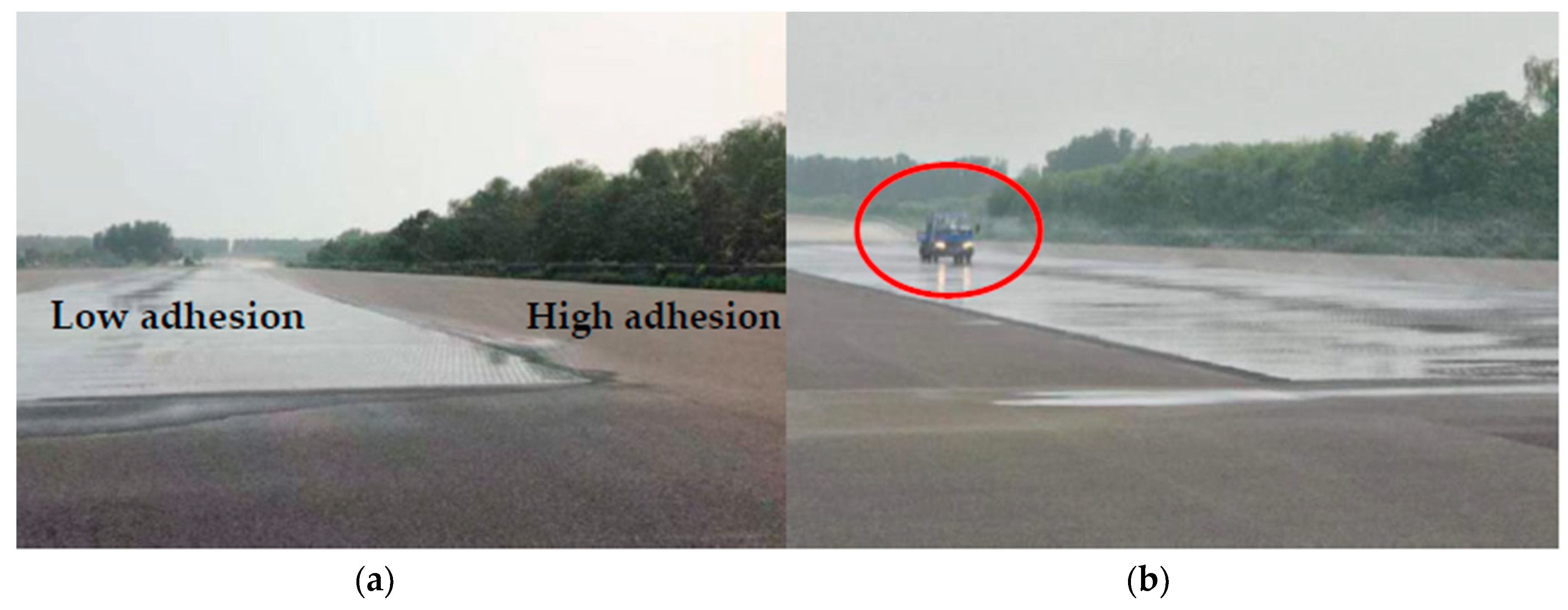
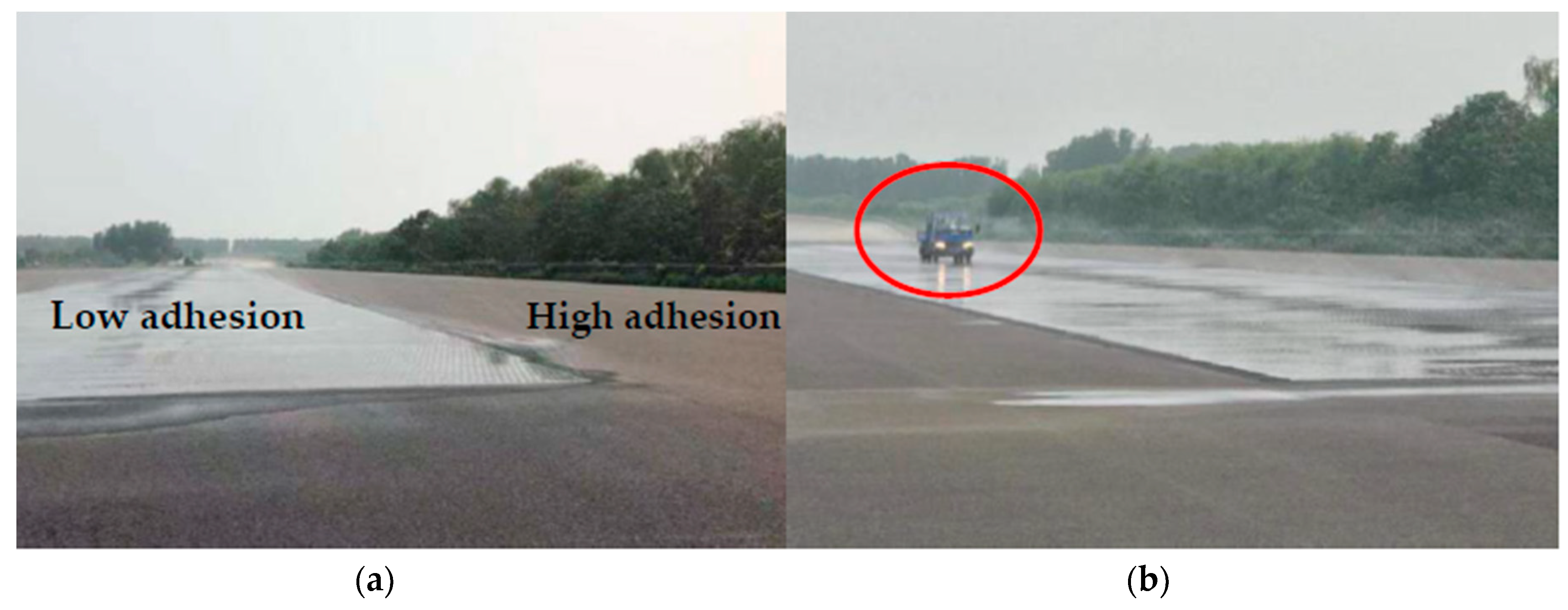
6. Actual Road Verification Test
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, Q.; Tian, W.F.; Chen, W.W.; Qadeer, A.; Wu, Y.M. Model-based fault diagnosis of an anti-lock braking system via structural analysis. Sensors 2018, 18, 4467. [Google Scholar] [CrossRef] [PubMed]
- Shi, Z.; Legate, I.; Gu, F.; Fieldhouse, J.; Ball, A. Prediction of antilock braking system condition with the vehicle stationary using a model-based approach. Int. J. Automot. Technol. 2010, 11, 363–373. [Google Scholar] [CrossRef]
- Zhang, W.; Ding, N.G.; Chen, M.R.; Yu, G.Z.; Xu, X.Y. Development of a low-cost hardware-in-the-loop simulation system as a test bench for anti-lock braking system. Chin. J. Mech. Eng. 2011, 24, 98–104. [Google Scholar] [CrossRef]
- Wu, C.; Duan, Y.; Yu, Y. Design and HIL validation of Fuzzy self-optimizing control for pneumatic ABS. Automot. Eng. 2010, 32, 989–992. [Google Scholar]
- Wang, W.D.; Ding, N.G.; Zou, H.M.; Yu, G.Z.; Xu, X.Y. A research on the control algorithm and its HIL simulation of automotive ASR systems. Automot. Eng. 2009, 31, 1042–1048. [Google Scholar]
- Zhang, Z.S.; Wang, L.F.; Zhang, J.Z.; Ma, R.H. Study on requirements for load emulation of the vehicle with an electric braking system. IEEE Trans. Veh. Technol. 2017, 66, 9638–9653. [Google Scholar] [CrossRef]
- Guo, K.H.; Ding, H.T.; Liu, L. Research and development of vehicle ABS mixed simulation test-bed. Chin. J. Mech. Eng. 2000, 12, 1417–1420. [Google Scholar]
- Zhang, W.; Ding, N.G.; Yu, G.Z.; Wang, W.D.; Xu, X.Y. Development of integrative performance test bench of the vehicle ABS ECU. Trans. Chin. Soc. Agric. Mach. 2009, 40, 37–40. [Google Scholar]
- Chu, L.; Hou, Y.L.; Liu, M.H.; Li, J.; Gao, Y.M.; Mehrdad, E. Development of air-ABS-HIL-simulation test bench. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Arling ton, TX, USA, 9–12 September 2007. [Google Scholar]
- Li, S.H.; Zhao, J.W.; Yang, S.P.; Fan, H.Y. Research on a coordinated cornering brake control of three-axle heavy vehicles based on hardware-in-loop test. IET Intell. Transp. Syst. 2019, 13, 905–914. [Google Scholar] [CrossRef]
- Zhao, X.M.; Hao, R.R.; Zhou, Z.; Ashour, A.; Dey, N. Novel bench-based inspection approach for automobile anti-lock braking system. Int. J. Automot. Technol. 2018, 19, 825–836. [Google Scholar] [CrossRef]
- Hao, R.R.; Zhao, X.M.; Zhou, Z. Bench detection and road comparison test for auto anti-lock braking system. Trans. Chin. Soc. Agric. Mach. 2013, 44, 21–26. [Google Scholar]
- Hao, R.R.; Zhao, X.M.; Ma, J.; Xu, Z.G. A novel detection system of automobile ABS. J. Traffic Transp. Eng. 2011, 11, 69–75. [Google Scholar]
- Zhang, L.B.; Su, J.; Shan, H.Y.; Su, L.L.; Shan, H.M. Testing method of vehicle ABS based on the inertia simulation. J. Jilin Univ., Eng. Technol. Ed. 2009, 39, 115–118. [Google Scholar]
- Zhou, K.; Wang, X.D.; Jiao, W.L.; Tan, T.J.; Zhang, Y. Bench testing technology of automobile anti-lock braking performance. Electr. Mach. Control 2013, 17, 99–106. [Google Scholar]
- Parizad, A.; Iranian, M.E.; Yazdani, A.; Baghaee, H.R.; Gharehpetian, G.B. Real-Time implementation of asynchronous machine using LabVIEW RTX and FPGA module. In Proceedings of the IEEE Electrical Power and Energy Conference, Toronto, ON, Canada, 10–11 October 2018. [Google Scholar]
- Aissa, O.; Moulahoum, S.; Colak, I.; Kabache, N.; Babes, B. Improved performance and power quality of direct torque control of asynchronous motor by using intelligent controllers. Electr. Power Compon. Syst. 2016, 44, 343–358. [Google Scholar] [CrossRef]
- Yang, S.Y.; Ding, D.W.; Li, X.; Zhang, X. A novel rotor-flux observer based closed-loop control on induction motor torque with vector orientation. Proc. CSEE 2017, 37, 3298–3306. [Google Scholar]
- Liu, H.P.; Xue, P.F.; Peng, D.L. Speed sensorless vector control system based on nonlinear flux dynamic model. Electr. Mach. Control 2015, 19, 33–37. [Google Scholar]
- Rashag, H.F.; Koh, S.P.; Abdalla, A.N.; Tan, N.M.; Chong, K.H. Modified direct torque control using algorithm control of stator flux estimation and space vector modulation based on fuzzy logic control for achieving high performance from induction motors. J. Power Electron 2013, 13, 369–380. [Google Scholar] [CrossRef]
- Shuai, Z.Q.; Gao, F.; Qi, W.; Fu, R. Electrical inertia control algorithm based on simulation inertia deviation. J. Chin. Inertial Technol. 2018, 26, 127–132. [Google Scholar]
- Liu, H.P.; Zhan, X.Z.; Li, H.X.; Yuan, S.S. Research on self-compensated inertia test rig of pure electric vehicle dynamic system. Electr. Mach. Control 2011, 15, 55–62. [Google Scholar]
- Wang, Z.; Lv, H.L.; Zhou, X.J.; Chen, Z.M.; Yang, Y. Design and modeling of a test bench for dual-motor electric drive tracked vehicles based on a dynamic load emulation method. Sensors 2018, 18, 1993. [Google Scholar] [CrossRef] [PubMed]
- Fajri, P.; Ahmadi, R.; Ferdowsi, M. Equivalent vehicle rotational inertia used for electric vehicle test bench dynamic studies. In Proceedings of the IECON 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Fajri, P.; Ahmadi, R.; Ferdowsi, M. Test bench for emulating electric-drive vehicle systems using equivalent vehicle rotational inertia. In Proceedings of the IEEE Power and Energy Conference at Illinois, Champaign, IL, USA, 22–23 February 2013. [Google Scholar]
- Fajri, P.; Ahmadi, R.; Ferdowsi, M. Control approach based on equivalent vehicle rotational inertia suitable for motor-dynamometer test bench emulation of electric vehicles. In Proceedings of the International Electric Machines & Drives Conference, Chicago, IL, USA, 12–15 May 2013. [Google Scholar]
- Djeziri, M.A.; Ould Bouamama, B.; Merzouki, G.; Daupin-Tanguy, G. Optimal sensor placement for fault diagnosis. In Proceedings of the IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009. [Google Scholar]
- Wang, X.; Liu, C.; Xiao, Z.M.; Wu, X. Study and implementation of vehicle brake test system. In Proceedings of the IEEE International Conference on Information and Automation, Lijing, China, 8–10 August 2015. [Google Scholar]
- Kubo, P.; Paiva, C.; Larocca, A.; Dawson, J. Quantification of the vertical load applied to the pavement during braking maneuver of a commercial vehicle. J. Transp. Eng. 2016, 142, 06016001. [Google Scholar] [CrossRef]
- Guo, K.H. UniTire: Unified tire model. Chin. J. Mech. Eng. 2016, 12, 90–99. [Google Scholar] [CrossRef]
- Guo, K.H.; Sun, S.L.; Lu, D. Tire longitudinal-slip characteristics considering transient vertical load and transient slip ratio. J. Jilin Univ. Eng. Technol. Ed. 2007, 2, 249–252. [Google Scholar]
- Lâle, E.B.; Paul, A.B.; Klaus, S. Multidisciplinary modeling and simulation framework for reusable launch vehicle system dynamics and control. In Proceedings of the 7th International Conference on Astrodynamics Tools and Techniques, Oberpfaffenhofen, Germany, 6–9 November 2018. [Google Scholar]
- Boreiry, M.; Ebrahimi-Nejad, S.; Marzbanrad, J. Sensitivity analysis of chaotic vibrations of a full vehicle model with magnetorheological damper. Chaos, Solitons Fractals. 2019, 127, 428–442. [Google Scholar] [CrossRef]
- Zhang, W.; Guo, X.X. An ABS Control Strategy for Commercial Vehicle. IEEE-ASME Trans. Mechatron. 2015, 20, 384–392. [Google Scholar]
- Zheng, T.X.; Ma, F.L. Automotive ABS control strategy based on logic threshold. J. Traffic Transp. Eng. 2010, 10, 69–74. [Google Scholar]
- Bi, Z.M.; Mueller, D.W. Friction predication on pin-to-plate interface of PTFE material and steel. Friction 2018, 7, 268–281. [Google Scholar] [CrossRef] [Green Version]
- Benmoussa, S.; Djezir, M.A. Remaining useful life estimation without needing for prior knowledge of the degradation features. IET Sci. Meas. Technol. 2017, 11, 1071–1078. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Vehicle dimensions (mm) | 5955 × 1780 × 2140 | Type | Light truck |
| Curb weight (kg) | 2460 | Centroid height (m) | 0.7 |
| Wheelbase (m) | 3.36 | Distance between front axle and centroid (m) | 1.595 |
| Tire specification | 7.00R16LT | Distance between rear axle and centroid (m) | 1.765 |
| Output Parameter | High Adhesion Road | Bisectional Road | Low Adhesion Road |
|---|---|---|---|
| Braking time (s) | 2.37 | 6.02 | 6.71 |
| Braking distance(m) | 15.71 | 42.75 | 52.31 |
| MFDD (m/s2) | 6.26 | 2.45 | 2.27 |
| Adhesion coefficient utilization | 0.87 | none | 0.81 |
| RMS of slip rate | 9.87 | none | 7.57 |
| Optimal proportion of slip rate (10%–20%) | 28.21 | none | 21.71 |
| Output Parameter | High Adhesion Road | Bisectional Road | Low Adhesion Road |
|---|---|---|---|
| Braking time(s) | 2.51 | 6.11 | 6.52 |
| Braking distance(m) | 17.52 | 46.64 | 49.43 |
| MFDD(m/s2) | 6.02 | 2.29 | 2.19 |
| Adhesion coefficient utilization | 0.82 | none | 0.85 |
| RMS of slip rate | 10.94 | none | 8.06 |
| Optimal proportion of slip rate (10%–20%) | 30.2 | none | 23.31 |
| Difference in Percentage (%) | High Adhesion Road | Bisectional Road | Low Adhesion Road |
|---|---|---|---|
| Braking time | 5.57 | 1.47 | 2.91 |
| Braking distance | 10.33 | 8.34 | 5.51 |
| MFDD | 3.99 | 6.99 | 3.52 |
| Adhesion coefficient utilization | 6.10 | none | 4.71 |
| RMS of slip rate | 9.75 | none | 6.08 |
| Optimal proportion of slip rate (10%–20%) | 6.59 | none | 6.86 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, Z.; Wang, G.; Gong, Z.; Zhang, S.; Xu, D.; Peng, S. Double-Drum Test Bench for Variable Load Transfer Simulation by Electromechanical Inertia Compensation. Sensors 2019, 19, 4322. https://doi.org/10.3390/s19194322
Xing Z, Wang G, Gong Z, Zhang S, Xu D, Peng S. Double-Drum Test Bench for Variable Load Transfer Simulation by Electromechanical Inertia Compensation. Sensors. 2019; 19(19):4322. https://doi.org/10.3390/s19194322
Chicago/Turabian StyleXing, Zhichao, Guoye Wang, Zhangpeng Gong, Shudong Zhang, Dongxin Xu, and Sijie Peng. 2019. "Double-Drum Test Bench for Variable Load Transfer Simulation by Electromechanical Inertia Compensation" Sensors 19, no. 19: 4322. https://doi.org/10.3390/s19194322
APA StyleXing, Z., Wang, G., Gong, Z., Zhang, S., Xu, D., & Peng, S. (2019). Double-Drum Test Bench for Variable Load Transfer Simulation by Electromechanical Inertia Compensation. Sensors, 19(19), 4322. https://doi.org/10.3390/s19194322