An Adaptive Real-Time Detection Algorithm for Dim and Small Photoelectric GSO Debris

Abstract
1. Introduction
2. GSO Debris Extractor
2.1. Background Suppression Based on Morphological Top-Hat Transform
2.2. Adaptive Fast Image Registration
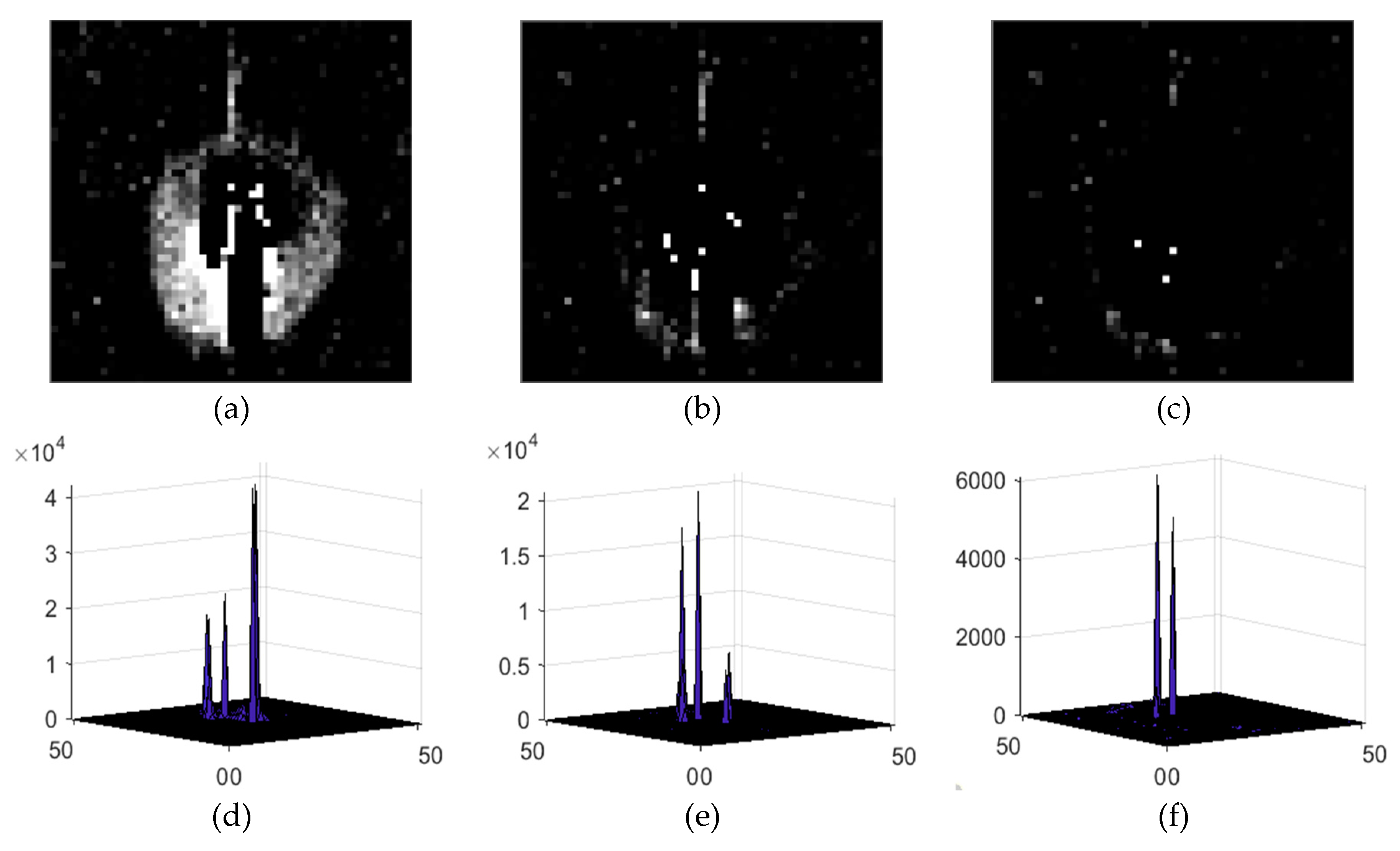
2.3. Stellar Suppression Based on the Enhanced Dilation Difference Algorithm
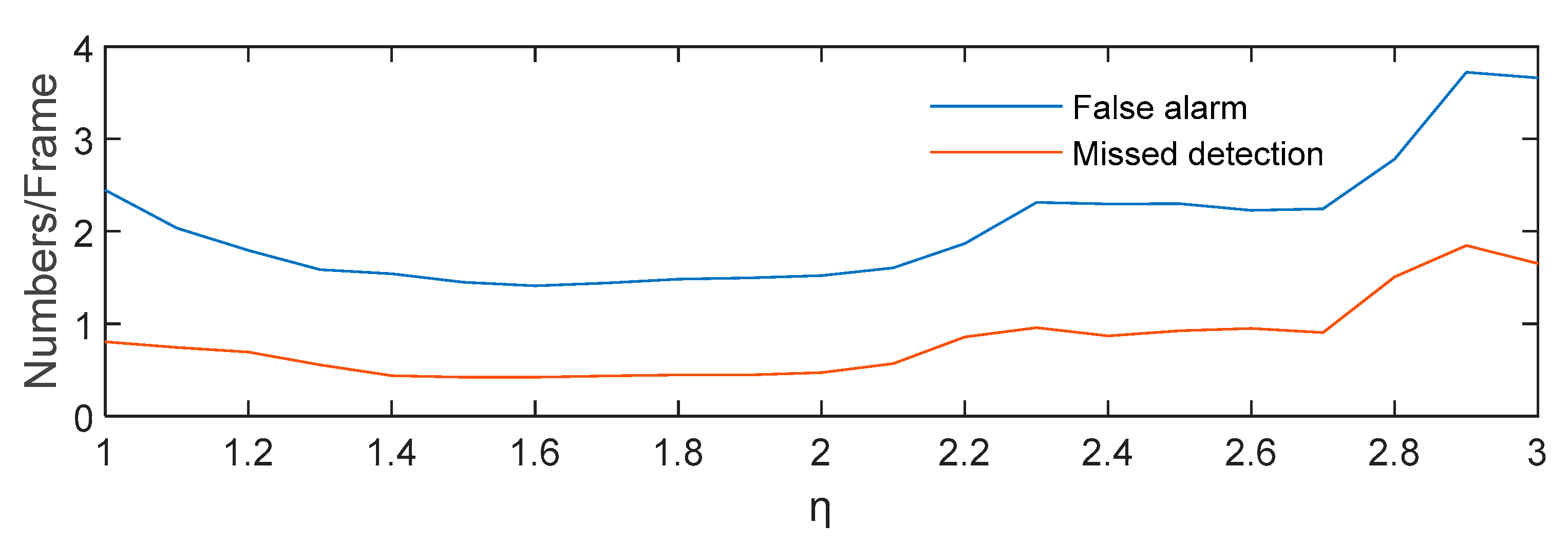
2.4. GSO Debris Enhancement and Target Segmentation Based on Inter-Frame Correlation and Threshold Segmentation Technology
3. GSO Debris Tracker
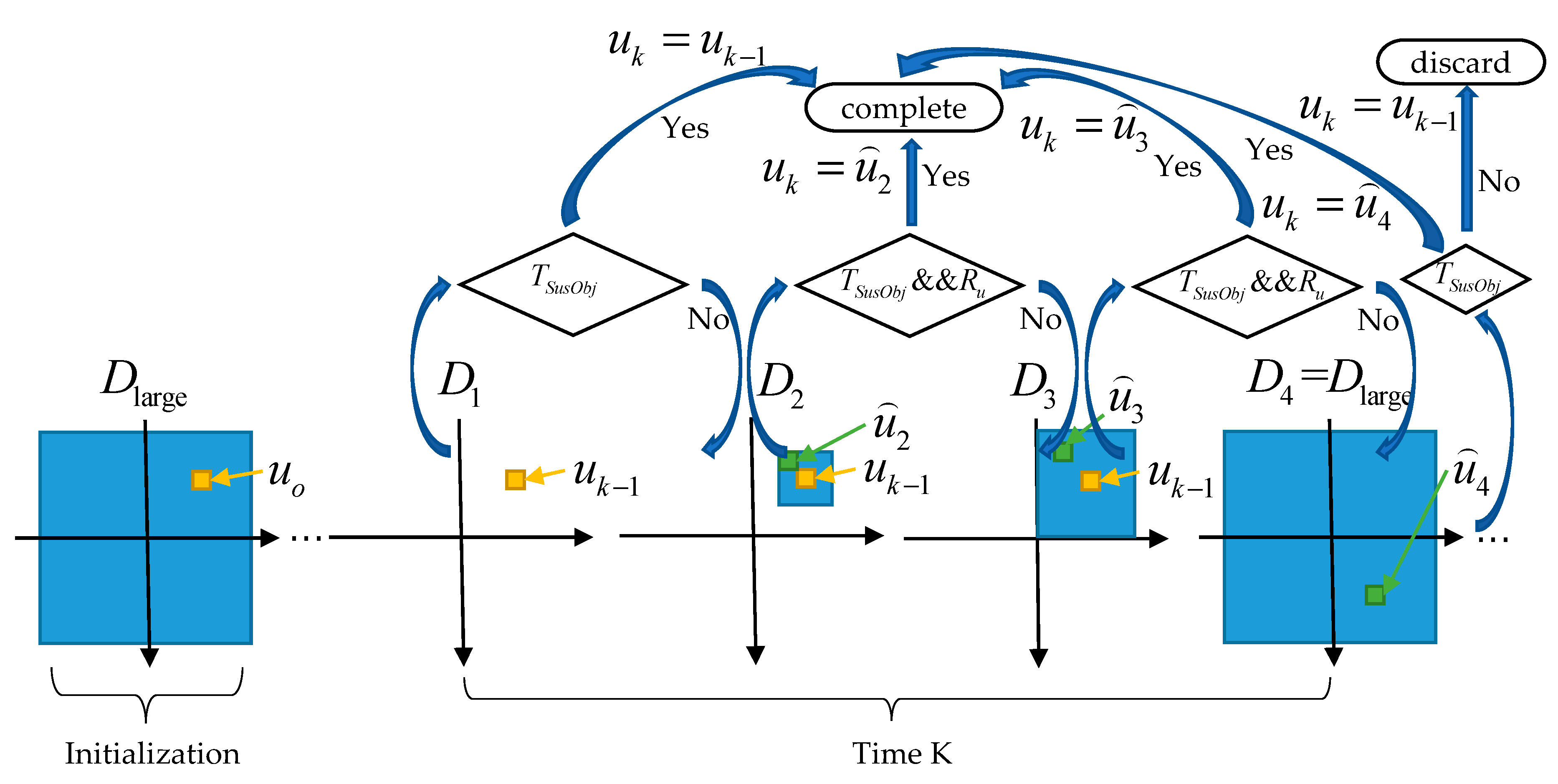
3.1. Adaptive Inter-Frame Interval Estimation
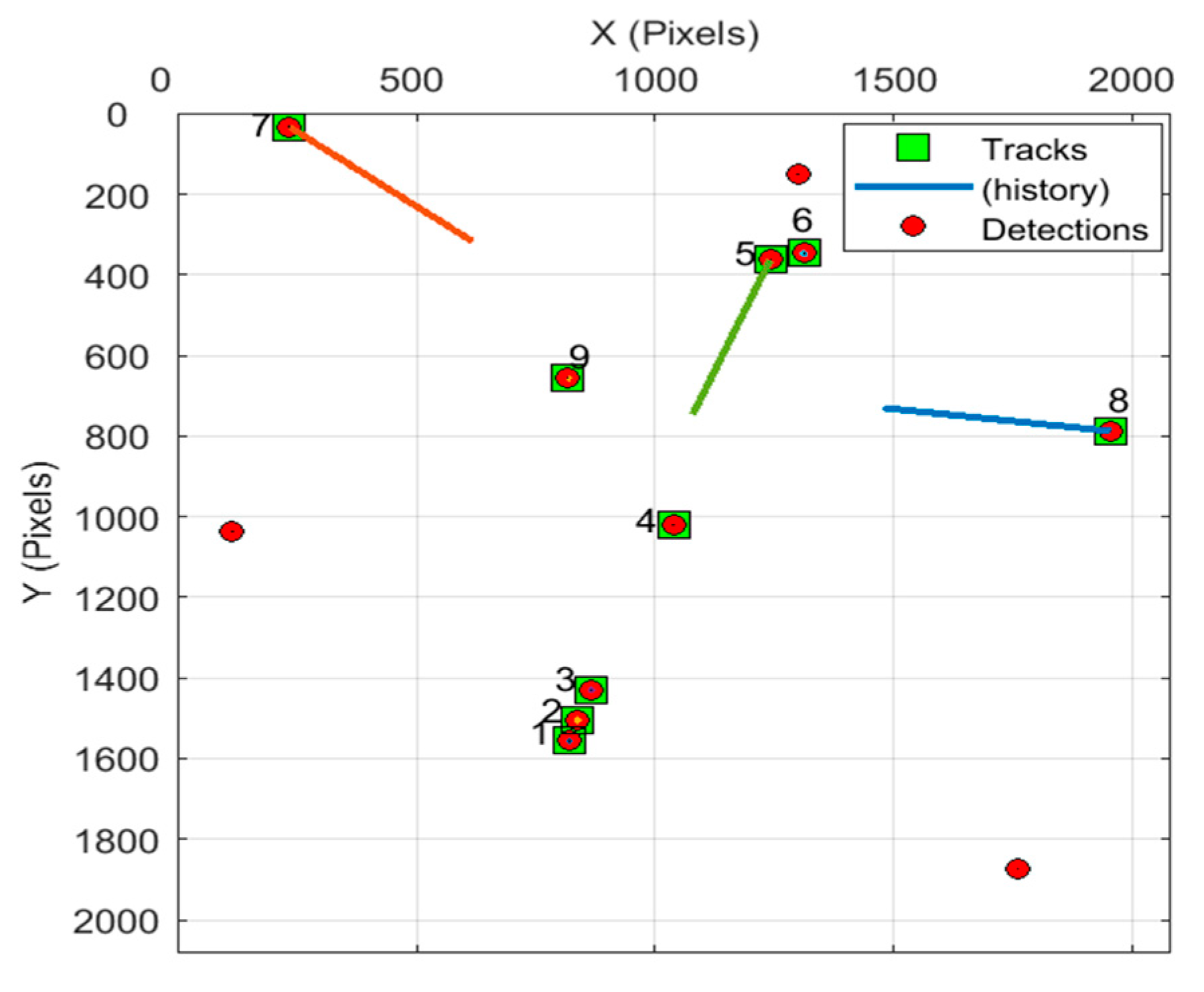
3.2. GNN Multi-Target Tracking Algorithm
4. Results
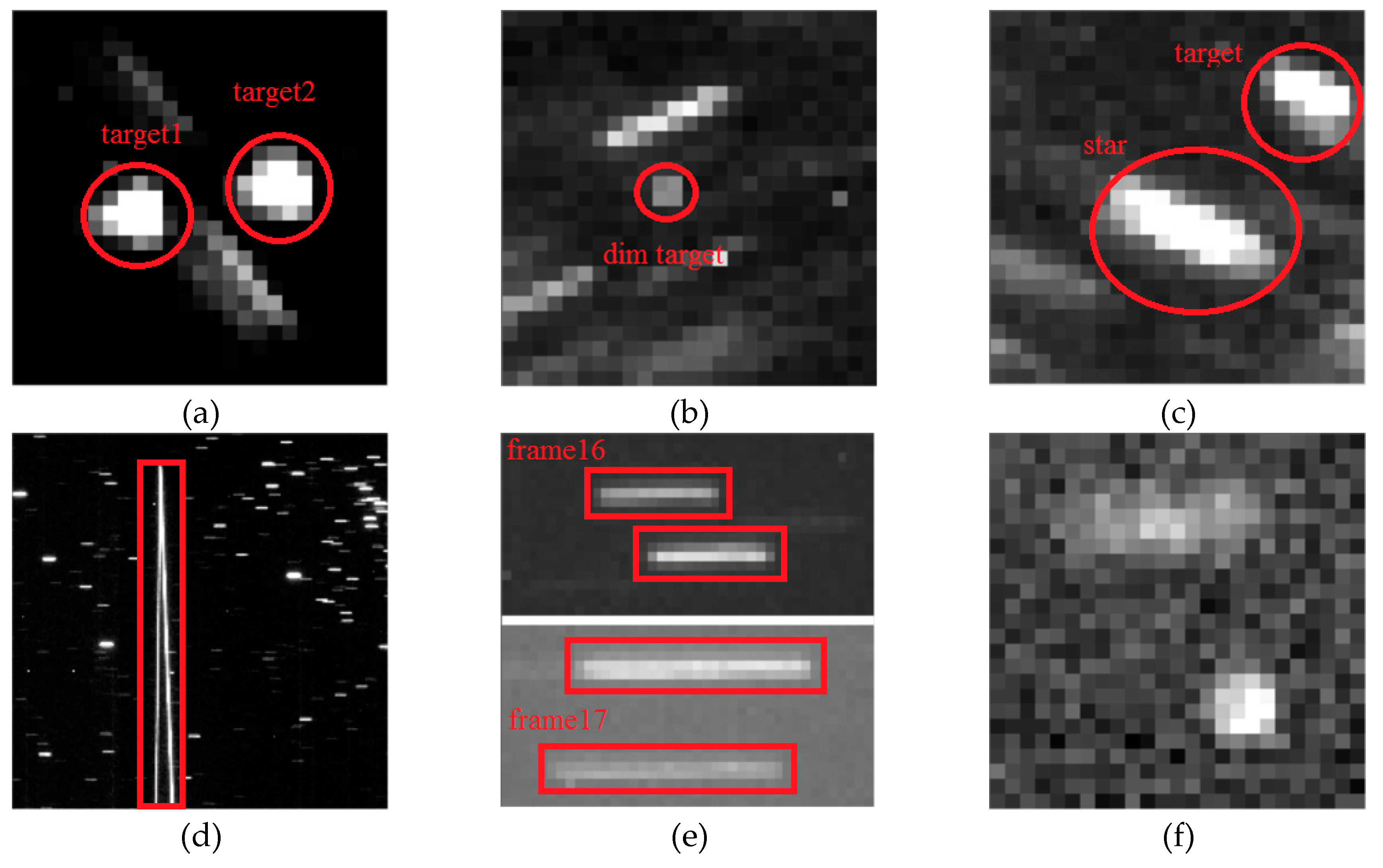
4.1. Introduction of Measured Data
4.2. Processing Results of Measured Data
5. Conclusions and Prospects
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Luo, H.; Mao, Y.D.; Yu, Y.; Tang, Z.H. FocusGEO observations of space debris at Geosynchronous Earth Orbit. Adv. Space Res. 2019, 64, 465–474. [Google Scholar] [CrossRef]
- Sun, R.Y.; Zhan, J.W.; Zhao, C.Y.; Zhang, X.X. Algorithms and applications for detecting faint space debris in GEO. Acta Astronaut. 2015, 110, 9–17. [Google Scholar] [CrossRef]
- Fu, J.; Cai, H.; Zhang, S. Research on Relative Motion of Approach to GEO satellite based on HEO. Procedia Eng. 2011, 15, 4828–4834. [Google Scholar] [CrossRef][Green Version]
- Lupo, R.; Albanese, C.; Bettinelli, D.; Brancati, M.; Minei, G.; Pernechele, C. Lighthouse: A spacebased mission concept for the surveillance of geosynchronous space debris from low earth orbit. Adv. Space Res. 2018, 62, 3305–3317. [Google Scholar] [CrossRef]
- Molotov, I.; Agapov, V.; Titenko, V.; Khutorovsky, Z.; Burtsev, Y.; Guseva, I.; Biryukov, V. International scientific optical network for space debris research. Adv. Space Res. 2008, 41, 1022–1028. [Google Scholar] [CrossRef]
- Schildknecht, T.; Ploner, M.; Hugentobler, U. The search for debris in GEO. Adv. Space Res. 2001, 28, 1291–1299. [Google Scholar] [CrossRef]
- Yanagisawa, T.; Kurosaki, H.; Oda, H.; Tagawa, M. Ground-based optical observation system for LEO objects. Adv. Space Res. 2015, 56, 414–420. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, X.F.; Luo, H.; Mao, Y.D.; Tang, Z.H. Application of CCD drift-scan photoelectric technique on monitoring GEO satellites. Adv. Space Res. 2018, 61, 2320–2327. [Google Scholar] [CrossRef]
- Zhao, C.Y.; Zhang, M.J.; Wang, H.B.; Xiong, J.N.; Zhu, T.L.; Zhang, W. Analysis on the long-term dynamical evolution of the inclined geosynchronous orbits in the Chinese BeiDou navigation system. Adv. Space Res. 2015, 56, 377–387. [Google Scholar] [CrossRef]
- Schildknecht, T. Optical surveys for space debris. Astron. Astrophys. Rev. 2007, 14, 41–111. [Google Scholar] [CrossRef]
- Sun, R.Y.; Zhao, C.Y. An adaptive threshold method for improving astrometry of space debris CCD images. Adv. Space Res. 2014, 53, 1664–1674. [Google Scholar] [CrossRef]
- Núñez, J.; Núñez, A.; Montojo, F.J.; Condominas, M. Improving space debris detection in GEO ring using image deconvolution. Adv. Space Res. 2015, 56, 218–228. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, J.J.; Wu, W.W.; Yuan, N.C. An antipodal Vivaldi antenna with band-notched characteristics for ultra-wideband applications. AEU Int. J. Electron. Commun. 2017, 76, 152–157. [Google Scholar]
- Schildknecht, T.; Hugentobler, U.; Ploner, M. Optical surveys of space debris in GEO. Adv. Space Res. 1999, 23, 45–54. [Google Scholar] [CrossRef]
- Cohen, G.; Afshar, S.; Morreale, B.; Bessell, T.; Wabnitz, A.; Rutten, M.; Schaik, A.V. Event-based sensing for space situational awareness. J. Astronaut. Sci. 2019, 66, 125–141. [Google Scholar] [CrossRef]
- Hu, X.; Li, D.J.; Fu, H.C.; Wei, K. System Analysis of Ground-based Inverse Synthetic Aperture Lidar for Geosynchronous Orbit Object Imaging. Acta Photonica Sin. 2018, 47, 0601003. [Google Scholar]
- Do, H.N.; Chin, T.J.; Moretti, N.; Jah, M.K.; Tetlow, M. Robust foreground segmentation and image registration for optical detection of GEO objects. Adv. Space Res. 2019, 64, 733–746. [Google Scholar] [CrossRef]
- Skinner, M.A.; Russell, R.W.; Rudy, R.J.; Gutierrez, D.J.; Kim, D.L.; Crawford, K.; Kelecy, T. Time-resolved infrared spectrophotometric observations of high area to mass ratio (HAMR) objects in GEO. Acta Astronaut. 2011, 69, 1007–1018. [Google Scholar] [CrossRef]
- Kelecy, T.; Baker, E.; Seitzer, P.; Payne, T.; Thurston, R. Prediction and tracking analysis of a class of high area-to-mass ratio debris objects in geosynchronous orbit. In Proceedings of the 2008 Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 16–19 September 2008; p. 33. [Google Scholar]
- Krisko, P.H.; Hall, D.T. Geosynchronous region orbital debris modeling with GEO_EVOLVE 2.0. Adv. Space Res. 2004, 34, 1166–1170. [Google Scholar] [CrossRef]
- Cardona, T.; Seitzer, P.; Rossi, A.; Piergentili, F.; Santoni, F. BVRI photometric observations and light-curve analysis of GEO objects. Adv. Space Res. 2016, 58, 514–527. [Google Scholar] [CrossRef]
- Seitzer, P.; Cowardin, H.M.; Barker, E.; Abercromby, K.J.; Kelecy, T.M.; Horstman, M. Optical photometric observations of GEO debris. In Proceedings of the 2010 AMOS Technical Conference, Wailea, HI, USA, 14–17 September 2010. [Google Scholar]
- Kong, S.; Zhou, J.; Ma, W. Effect Analysis of Optical Masking Algorithm for GEO Space Debris Detection. Int. J. Opt. 2019, 2019, 2815890. [Google Scholar] [CrossRef]
- Yanagisawa, T.; Nakajima, A.; Kadota, K.; Kurosaki, H.; Nakamura, T.; Yoshida, F.; Sato, Y. Automatic detection algorithm for small moving objects. Publ. Astron. Soc. Jpn. 2005, 57, 399–408. [Google Scholar] [CrossRef]
- Kouprianov, V. Distinguishing features of CCD astrometry of faint GEO objects. Adv. Space Res. 2008, 41, 1029–1038. [Google Scholar] [CrossRef]
- Laas-Bourez, M.; Blanchet, G.; Boër, M.; Ducrotté, E.; Klotz, A. A new algorithm for optical observations of space debris with the TAROT telescopes. Adv. Space Res. 2009, 44, 1270–1278. [Google Scholar] [CrossRef]
- Mahler, R.P.S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Trans. Signal Process. 2008, 57, 409–423. [Google Scholar]
- Vo, B.N.; Vo, B.T.; Hoang, H.G. An efficient implementation of the generalized labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2016, 65, 1975–1987. [Google Scholar] [CrossRef]
- Mahler, R. Advances in Statistical Multisourc-Multitarget Information Fusion. Artech House; Fan, H.Q., Ed.; National Defense Industry Press: Beijing, China, 2017; pp. 203–205. [Google Scholar]
- Dezert, J.; Bar-Shalom, Y. Joint probabilistic data association for autonomous navigation. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 1275–1286. [Google Scholar] [CrossRef]
- Blackman, S.S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Duan, Y. Research on LEO Target Detection for Binding Telescopes with Large FOV. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2017. [Google Scholar]
- Cheng, K.; Cheng, Y. Fast parallel algorithm of morphology operation based on element subsection. Video Eng. 2016, 40, 26–29. [Google Scholar]
- Sun, Q.; Niu, Z.D.; Yao, C. Implementation of Real-time Detection Algorithm for Space Debris Based on Multi-core DSP. In Proceedings of the 2019 International Conference on Computer Graphics and Digital Image Processing, Rome, Italy, 25–27 July 2019. [Google Scholar]
- Huang, B.K. Research on Intensity-Based Image Registration Technology. Master’s Thesis, Jiangxi University of Science and Technology, Ganzhou, China, 2016. [Google Scholar]
- Xiu, P.S. Small Target Detection and Tracking in Deep Space. Master’s Thesis, University of Chinese Academy of Science, Chengdu, China, 2015. [Google Scholar]
- Drake, A.J.; Djorgovski, S.G.; Catelan, M.; Graham, M.J.; Mahabal, A.A.; Larson, S.; Christensen, E.; Garradd, G. The Catalina Surveys Southern Periodic Variable Star Catalogue. Mon. Not. R. Astron. Soc. 2017, 469, 3688–3712. [Google Scholar] [CrossRef]
- Drake, A.J.; Graham, M.J.; Djorgovski, S.G.; Catelan, M.; Mahabal, A.A.; Torrealba, G.; Garcia-Alvarez, D.; Larson, S. The Catalina Surveys Periodic Variable Star Catalog. Astrophys. J. Suppl. Ser. 2014, 213, 9. [Google Scholar] [CrossRef]
- Griffiths, M. Observer’s Guide to Variable Stars; Springer: Cham, Switzerland, 2018; pp. 107–110. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R. Estimation and Tracking: Principles, Techniques, and Soft-Ware; Artech House: Norwood, MA, USA, 1993; p. 95. [Google Scholar]
- Vo, B.T.; Vo, B.N. Labeled random finite sets and multi-object conjugate priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Früh, C.; Schildknecht, T. Accuracy of Two-Line-Element Data for Geostationary and High-Eccentricity Orbits. J. Guid. Control. Dyn. 2012, 35, 1483–1491. [Google Scholar] [CrossRef]
- Li, F.; Li, Y.P.; Wang, B.J. Application of ROC in Detection Performance Evaluation of Infrared Imaging System. Opt. Optoelectron. Technol. 2012, 10, 28–31. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time(s) | Seq_I (144) | Seq_II (105) | Seq_III (104) | Seq_IV (44) | Seq_V (42) | Seq_VI (36) | Seq_VII (21) |
|---|---|---|---|---|---|---|---|
| JointGLMB (SMC) [30] | 189.523 | 130.008 | 108.813 | 29.544 | 19.893 | 28.419 | 13.075 |
| GLMB(GMS) [43] | 197.426 | 68.187 | 57.745 | 16.503 | 5.623 | 15.390 | 9.381 |
| CBMeMBer (GMS) [29] | 1.181 | 0.702 | 0.864 | 0.151 | 0.116 | 0.361 | 0.093 |
| CPHD(GMS) [28] | 1.005 | 0.795 | 0.745 | 0.186 | 0.167 | 0.264 | 0.101 |
| PHD(GMS) [27] | 0.51 | 0.484 | 0.516 | 0.084 | 0.093 | 0.172 | 0.066 |
| MHT [33] | 5.398 | 4.33 | 4.79 | 1.918 | 3.002 | 1.903 | 1.672 |
| JPDA [32] | 2.493 | 2.075 | 2.262 | 0.763 | 1.345 | 0.754 | 0.612 |
| GNN [31] (pp. 203–205) | 2.176 | 1.972 | 2.253 | 0.732 | 1.525 | 0.729 | 0.597 |
| Number | Seq_I | Seq_II | Seq_III | Seq_IV | Seq_V | Seq_VI | Seq_VII |
|---|---|---|---|---|---|---|---|
| GEO debris | 6 | 7 | 6 | 4 | 4 | 5 | 3 |
| Non-GEO debris | 2 | 4 | 3 | 0 | 1 | 0 | 2 |
| SNR Multiples | 1313 | 1343 | 234 | 1390 | 595 | 539 | 780 |
| Target | SNR_min (dB) | Omi_R (%) | Target | SNR_min (dB) | Omi_R (%) | Target | SNR_min (dB) | Omi_R (%) |
|---|---|---|---|---|---|---|---|---|
| Target1 | 9.85 | 0.00 | Target17 | 27.12 | 0.70 | Target33 | 17.43 | 4.35 |
| Target2 | 13.4 | 0.00 | Target18 | 10.26 | 1.41 | Target34 | 19.53 | 4.35 |
| Target3 | 14.14 | 0.00 | Target19 | 13.21 | 1.41 | Target35 | 22.61 | 4.35 |
| Target4 | 14.23 | 0.00 | Target20 | 15.45 | 1.41 | Target36 | 25.71 | 4.35 |
| Target5 | 14.78 | 0.00 | Target21 | 17.06 | 1.41 | Target37 | 10.71 | 4.90 |
| Target6 | 16.32 | 0.00 | Target22 | 22.96 | 1.41 | Target38 | 16.7 | 6.52 |
| Target7 | 16.99 | 0.00 | Target23 | 7.37 | 1.96 | Target39 | 13.33 | 9.38 |
| Target8 | 19.28 | 0.00 | Target24 | 14.35 | 2.63 | Target40 | 17.13 | 12.50 |
| Target9 | 20.5 | 0.00 | Target25 | 8.24 | 2.82 | Target41 | 5.91 | 16.67 |
| Target10 | 23.06 | 0.00 | Target26 | 6.98 | 2.88 | Target42 | 10.91 | 17.65 |
| Target11 | 24.22 | 0.00 | Target27 | 7.68 | 2.88 | Target43 | 15.81 | 19.05 |
| Target12 | 25.31 | 0.00 | Target28 | 18.27 | 2.88 | Target44 | 6.024 | 30.39 |
| Target13 | 29.89 | 0.00 | Target29 | 7.19 | 2.94 | Target45 | 24.56 | 40.66 |
| Target14 | 33.08 | 0.00 | Target30 | 10.55 | 2.94 | Target46 | 17.69 | 53.33 |
| Target15 | 33.5 | 0.00 | Target31 | 9.97 | 3.13 | Target47 | 12.49 | 56.67 |
| Target16 | 24.46 | 0.70 | Target32 | 11.48 | 3.92 |
| Time(s) | Seq_I | Seq_II | Seq_III | Seq_IV | Seq_V | Seq_VI | Seq_VII |
|---|---|---|---|---|---|---|---|
| Total | 189.197 | 130.945 | 122.649 | 83.118 | 85.445 | 76.034 | 31.661 |
| Single Frame | 1.314 | 1.247 | 1.179 | 1.889 | 2.034 | 2.112 | 1.508 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Q.; Niu, Z.; Wang, W.; Li, H.; Luo, L.; Lin, X. An Adaptive Real-Time Detection Algorithm for Dim and Small Photoelectric GSO Debris. Sensors 2019, 19, 4026. https://doi.org/10.3390/s19184026
Sun Q, Niu Z, Wang W, Li H, Luo L, Lin X. An Adaptive Real-Time Detection Algorithm for Dim and Small Photoelectric GSO Debris. Sensors. 2019; 19(18):4026. https://doi.org/10.3390/s19184026
Chicago/Turabian StyleSun, Quan, Zhaodong Niu, Weihua Wang, Haijing Li, Lang Luo, and Xiaotian Lin. 2019. "An Adaptive Real-Time Detection Algorithm for Dim and Small Photoelectric GSO Debris" Sensors 19, no. 18: 4026. https://doi.org/10.3390/s19184026
APA StyleSun, Q., Niu, Z., Wang, W., Li, H., Luo, L., & Lin, X. (2019). An Adaptive Real-Time Detection Algorithm for Dim and Small Photoelectric GSO Debris. Sensors, 19(18), 4026. https://doi.org/10.3390/s19184026