1. Introduction
Pipeline-riser structures composed of a production well, subsea pipeline, and vertical riser are generally used in offshore oil and gas fields. Mixtures of liquids, gases, and solid components are extracted from a reservoir, transported through a horizontal subsea pipeline of several kilometers, and raised to the topside via a vertical riser near the platform. In a pipeline-riser system, a more complicated multiphase flow can be developed than the flow from a simple horizontal or vertical pipe. In particular, a typical severe slugging can be generated in an undesired cycle with unstable blowout, causing large fluctuations in pressure that lead to structural damage and reduce the production rate [
1,
2]. In detail, the severe slugging can generate liquid overflow, high pressure in the separators, overload on the gas compressors, extra fatigue by repeated impact, increased corrosion, and low production [
3,
4,
5,
6]. In offshore pipeline facilities, stable operation is important for safety and economic benefits; therefore, unstable flow should be identified as quickly as possible.
Many studies have classified flow regimes using machine learning algorithms in simple horizontal, vertical pipe, or pipeline-riser systems [
7,
8,
9,
10,
11,
12,
13,
14]. Wu et al. [
12] performed an experiment in a simple horizontal pipe using mixtures of mineral oil, air, and water to simulate oil-gas-water flow, and measured differential pressures. Features were extracted using the fractal dimension from denoised signals by the wavelet transform. A neural network (NN) was employed to classify stratified, intermittent, and annular flows. Trafalis [
11] investigated flow recognition with a support vector machine (SVM) in a simple horizontal and a simple vertical pipe by applying gas and liquid superficial velocities and pipe diameter as features. Three regimes of bubble, intermittent, and annular flows were identified for the vertical flow, and four categories of annular, bubble, intermittent, and stratified flows were recognized for the horizontal flow. However, as superficial velocities are difficult to acquire in industrial pipelines, applying them to real industrial environments is not easy.
Meanwhile, in studies of the pipeline-riser systems, Goudinakis [
8] obtained differential pressures in an S-shaped riser system. The normalized differential pressures were used as inputs of the NN, where the length of sample was 100 s. Four classes of bubble, oscillation (OSC), slug, and severe slugging 1 (SS1) were classified. Ye and Guo [
13] also conducted an experiment in an S-shaped riser and acquired differential pressure signals of 20-min length. Least-squares SVM (LS-SVM) classifiers were trained with features of statistical parameters such as absolute mean, variance, skewness, and power spectral densities. SS1, severe slugging 2 (SS2), severe slugging transition, OSC, and stable flow were identified. Zou et al. [
14] measured the differential pressure in a pipeline-riser system. For fast recognition, they computed the mean and range of differential pressures as feature vectors for the LS-SVM. They analyzed the results for various signal lengths and, in particular, the shortest signals of 6.8 s were tested by the classifier trained using 8.99 s signals. Four classes of severe slugging, OSC, stable like flow, and stable flow were recognized. In the case of a commonly used pressure gauge applied in the aforementioned studies, it is low-cost and usable at wide ranges of pressures and temperatures. However, it has some disadvantages: (1) a pressure tap can be blocked; (2) a pressure signal can be affected by either the water’s or gas’s velocity as well as by the flow regime [
10]; (3) it is difficult to move into another location once it is installed.
In addition to the previously mentioned measuring instrument, other devices have been used to identify the flow regime. Applications of electrical impedance measurements for flow regime recognition have been implemented by Hernández et al. [
15], Juliá et al. [
16], and Mi et al. [
9]. As the impedance sensor’s output is proportional to the void fraction, which is related to the flow pattern, its computational cost is relatively low [
10]. However, it is only applicable to two-phase flow where the conductivities and dielectric coefficients of the gas and liquid are significantly different from each other [
12]. Furthermore, it is sensitive to temperature and requires that the pipe should be composed of nonconducting material. Therefore, it may be difficult to operate in the industrial field.
The purpose of this study is to investigate severe slugging identification in a pipeline-riser system using accelerometer signals. Accelerometers are operated in a nonintrusive fashion and can be transferred to other locations after the initial installation, according to user’s desire or operational purpose. In addition, they can result in better classification performance, as the vibration characteristics are considerably different between stable flow and severe slugging, especially during liquid accumulation of the severe slugging process. In this study, a laboratory experiment for severe slugging monitoring in a pipeline-riser system using accelerometers is performed. Although the accelerometers are mounted in the air in the laboratory experiment, they could be applied in both the water and air, such as near the bottom of the riser or close to the topside in a real pipeline-riser system. For early recognition of the flow regime, relatively simple features characterizing flow-induced vibration (FIV) are presented based on statistical parameters and linear prediction coefficients (LPCs). The classification performance is compared and analyzed according to the signal length for different sensor selections using six accelerometers, one accelerometer at the riser base, and one accelerometer at the top of the riser. Two machine learning algorithms using the SVM and NN are applied to binary classification, and the NN is adopted for multiclass classification to recognize four classes: stable, SS1, and an irregular transition between severe slugging 3 (SS3) and dual-frequency severe slugging (DFSS).
This paper is organized as follows:
Section 2 describes the background of severe slugging, including its processes and types.
Section 3 presents the laboratory experiment in a pipeline-riser system under various environmental conditions of air and water superficial velocities, and presents the characteristics of accelerometer signals. In
Section 4, a simple description of statistical parameters and LPCs as features for machine learning algorithms is given. In addition, binary and multiclass classification results using the SVM and NN are demonstrated.
Section 5 summarizes this work and draws conclusions.
2. Description of Severe Slugging
Severe slugging is generally explained by the following four steps: (1) slug formation (2) slug movement into the separator (3) blowout and (4) liquid fallback [
17,
18].
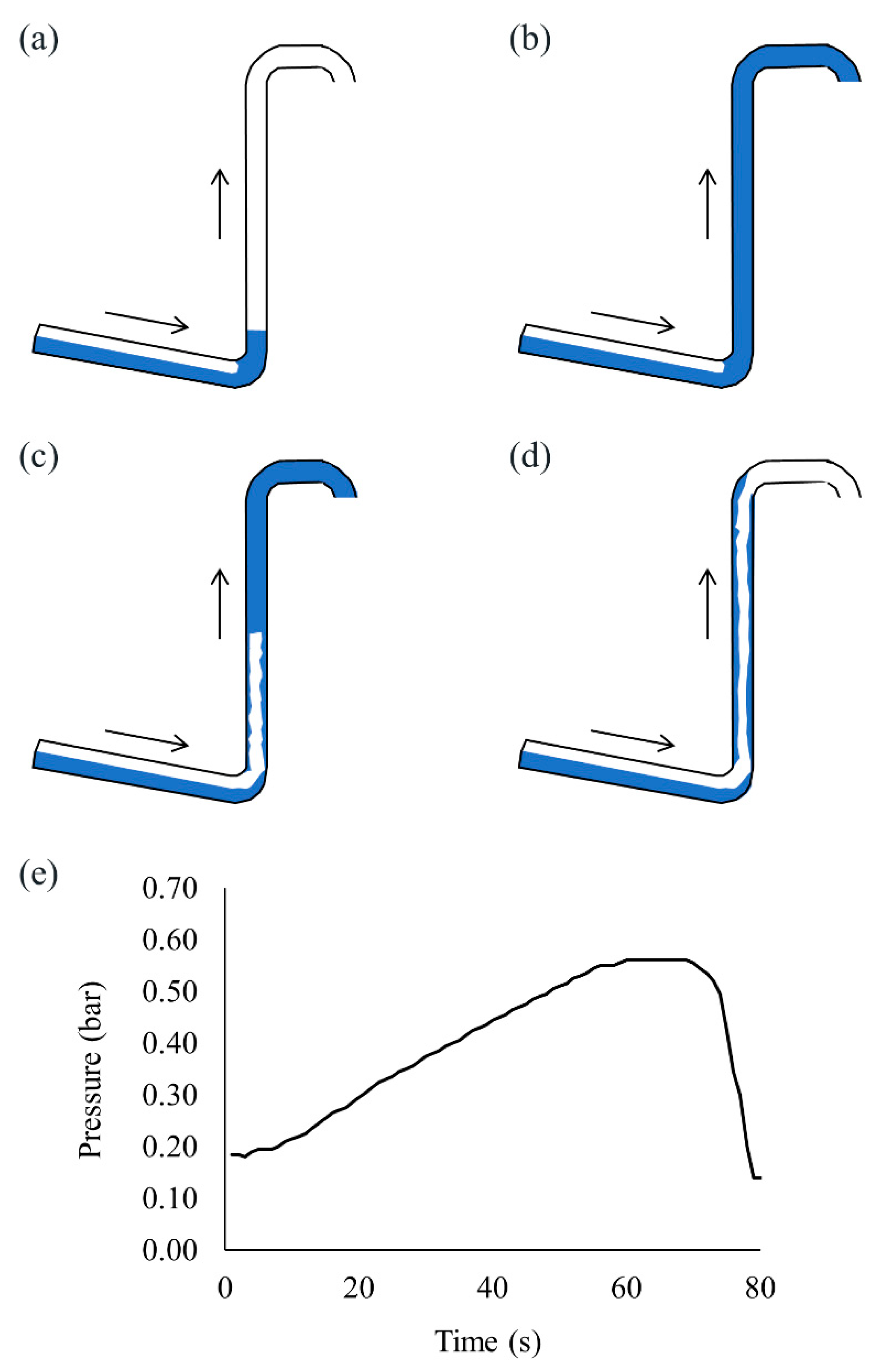
Figure 1a–d present the process of severe slugging and
Figure 1e shows the pressure at the bottom of the riser (
pB) during one cycle of severe slugging, where the water and gas superficial velocities are
= 0.19 m/s and
= 0.59 m/s, respectively. During slug formation in
Figure 1a, liquid transported from the pipeline starts to accumulate at the bottom of the riser and
pB continuously increases for less than approximately 60 s as shown in
Figure 1e, because the hydrostatic pressure increases by accumulated liquid in the riser. At the same time, the gas is blocked in the pipeline section and compressed. In the second stage of
Figure 1b, the accumulated liquid reaches the top of the riser and moves into the separator while the blocked gas is continuously compressed, and
pB increases to its maximum. When the pressure of the compressed gas surpasses the hydrostatic pressure of the accumulated liquid in the riser, the gas expands and blows out rapidly, as shown in
Figure 1c, and
pB starts to decrease. After the blowout, the remaining liquid in the riser falls back to the riser base as in
Figure 1d and the slug formation repeats.
In general, severe slugging can be classified into three types [
19,
20]: SS1, SS2, and SS3. SS1 and SS2 are similar, except for the length of the liquid slug. The liquid slug length of SS1 is longer than or equal to the height of the riser, whereas that of SS2 is shorter than the riser length. In case of SS2, the gas penetrates the riser before the liquid reaches the top of the riser, and as a result, the maximum
pB is lesser than that of SS1. SS3, however, is quite different from SS1 and SS2. The gas continuously moves into the riser and creates transient slugs of different sizes. The liquid from the transient slugs falls into the bottom of the riser, accumulates again, and produces a long aerated liquid slug with small bubbles. Similarly, when the compressed gas overcomes the hydrostatic pressure of the stacked aerated liquid slugs, the gas blows out and the cycle repeats. In addition to these three types of severe slugging, Malekzadeh et al. [
20] introduced another type of severe slugging, named DFSS. DFSS is related to SS3 and OSC, where OSC is characterized as cyclic pressure fluctuations without intense blowout [
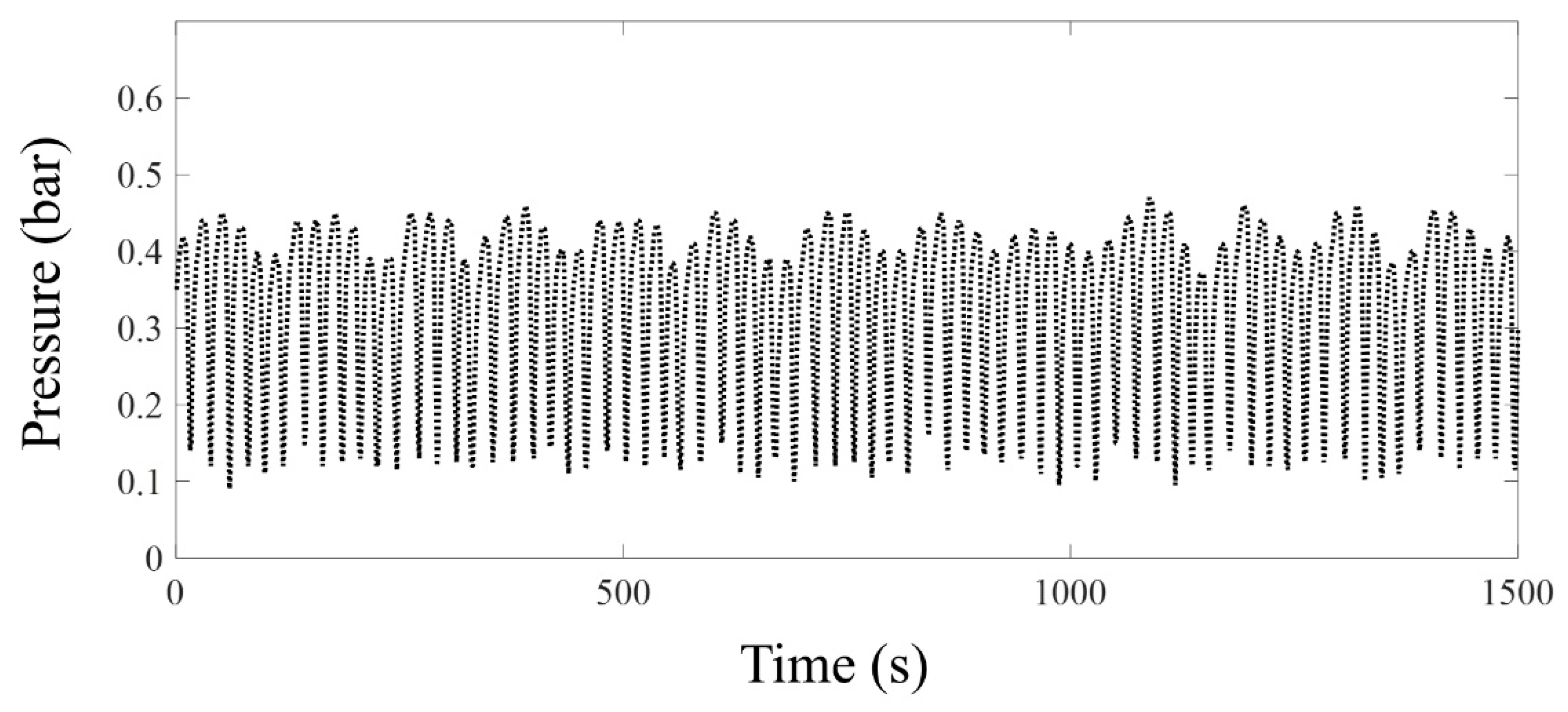
19]. With respect to DFSS, the liquid content is insufficient to generate SS3 and, at the same time, the gas flow rate is insufficient to maintain OSC. Accordingly, DFSS presents tendencies of both SS3 and OSC, resulting in two different frequencies. The high-frequency component is associated with fluctuations of both SS3 and OSC, because they have their own variations, and the low-frequency element is related to periodic transitions between SS3 and OSC. A typical example of the pressure
pB for DFSS is depicted in
Figure 2, as measured in our laboratory experiment at
= 0.15 m/s and
= 0.99 m/s. In
Figure 2, the period of the high-frequency component is approximately 20 s, and that of the low-frequency element is approximately 100 s. In this study, the unstable flow regimes of SS1, and the irregular transition between DFSS and SS3 are investigated.
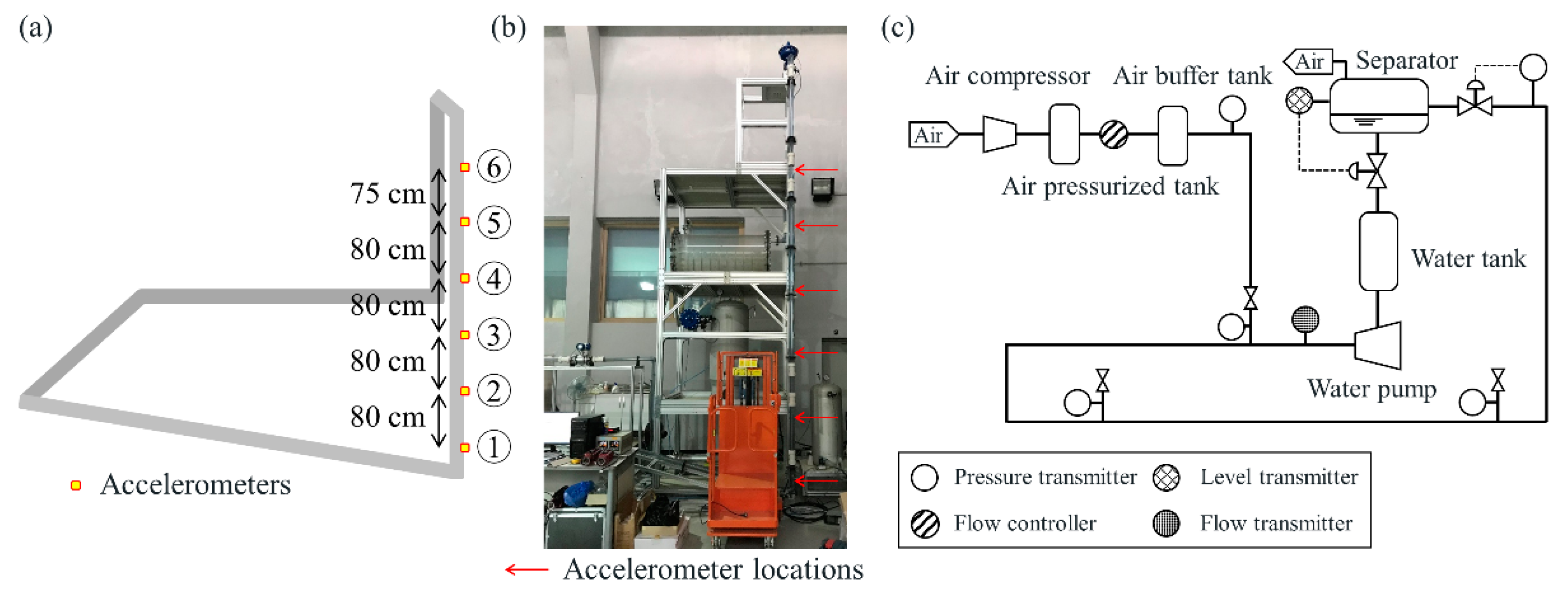
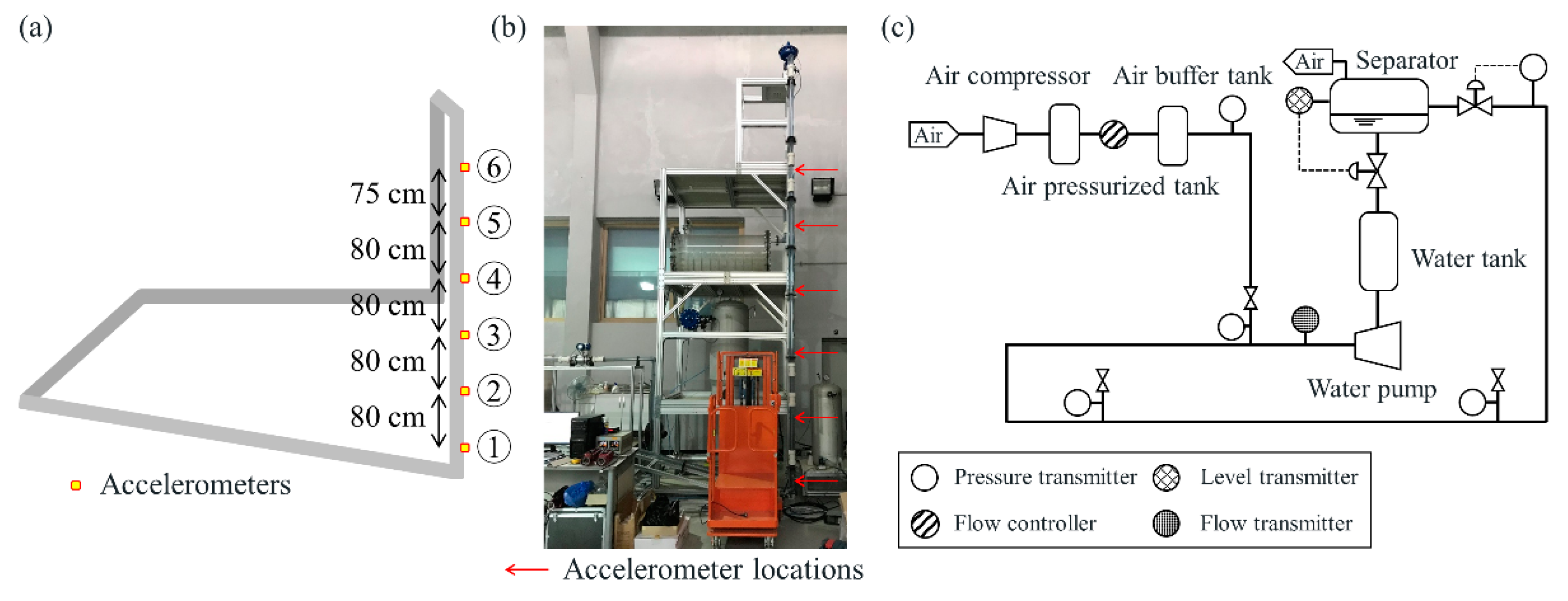
3. Experimental Apparatus and Procedure
The experiment was conducted in the flow loop of the Subsea Engineering and Flow Assurance Laboratory at Seoul National University, as shown in
Figure 3. The facility consists of a 6.28-m-long downward-inclined pipeline at −15.9° to the horizontal and a 5.6-m-high vertical riser. The pipe is composed of PVC and its inner diameter is 5.08 cm, with 5 mm thickness. The flow loop uses water and air as liquid and gas phases, respectively. The air is compressed to 8 bar by a compressor and stored in pressurized tank. A mass flow controller can control the air injection and an air buffer tank provides enough volume for air. The water is pumped from a water tank using a NETZSCH pump with maximum liquid flow rate 85.14 L/min, which is a constant flow pump producing same flow rate regardless of pressure fluctuation between the front and rear ends. At the top of the riser, a globe type valve is installed to control the flow rate and mitigate the severe slugging. Six accelerometers measuring out-of-plane accelerations were installed at the riser, as indicated by the square markers in
Figure 3a and the red arrows in
Figure 3b. For convenience, the accelerometers are numbered from 1 to 6 according to the location of the sensors, from the bottom to the top of the riser. Accelerometers 1, 3, 5, and 6 of PCB type 352A60 were installed at
h = 0.27, 1.87, 3.47, and 4.22 m from the floor, respectively, and connected to a B&K NEXUS conditioning amplifier 2693. The sensitivity of PCB type 352A60 is 1.02 mV/ms
−2 and its frequency range is from 5 Hz to 60 kHz. The other two accelerometers, 2 and 4, of B&K type 4384, mounted at
h = 1.07 and 2.67 m, were connected to a B&K NEXUS conditioning amplifier 2692-C. The sensitivity of B&K type 4384 is 1 pC/ms
−2 available between 0.1 Hz and 12.6 kHz. The vertical distance between each of the lower five accelerometers was 0.8 m, and the vertical distance between accelerometers 5 and 6 was 0.75 m. The length of accelerometer data was 10 s and the sampling rate was 50 kHz. In addition, five WIKA model A-10 pressure transmitters were installed as shown in
Figure 3c, and the pressure signal was sampled every second. In this study, only pressure signal obtained from the bottom of the riser is investigated as a reference for the accelerometer data.
To generate the different flow regimes of SS1, SS2, transition flow, and stable flow, various conditions of water and gas superficial velocities were tested, of which the number of measured data for each environmental condition is summarized in
Table 1.
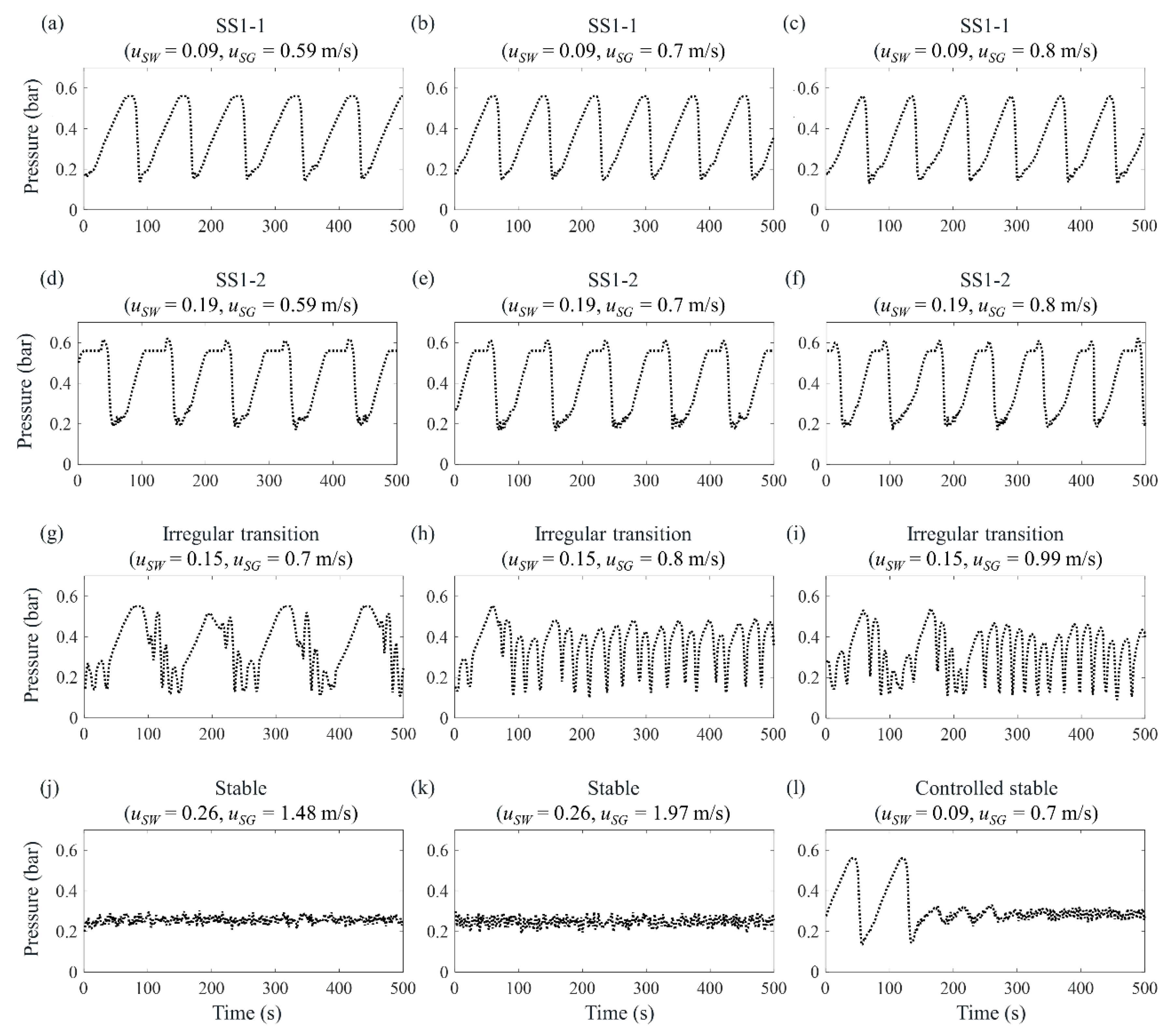
Figure 4 presents the measured pressure at the riser base (
pB) for each flow condition. Three kinds of the first type of SS1, which is called SS1-1 in this paper, occurred under the conditions of
= 0.09 m/s with
= 0.59, 0.7, and 0.8 m/s, as shown in
Figure 4a–c, respectively. When the gas superficial velocity increases, the severe slugging period decreases, because increased gas blocked in the pipeline reduces the time required to exceed the hydrostatic pressure of the accumulated liquid. The second type of SS1, hereinafter referred to as SS1-2, had a longer slug length than that of SS1-1 and three kinds of SS1-2 were generated at
= 0.19 m/s with
= 0.59, 0.7, and 0.8 m/s as shown in
Figure 4d–f, respectively. Because the liquid slug length of SS1-2 was longer than that of SS1-1, it needed more gas compression to blowout. Therefore, higher pressure peaks at the riser base are shown in
Figure 4d–f, where these peaks indicate gas blowout. For both SS1-1 and SS1-2, the hydrostatic pressures of the fully accumulated liquid at the riser are 0.56 bar. Next, three types of irregular transition between DFSS and SS3 were tested at
= 0.15 m/s with
= 0.7, 0.8, and 0.99 m/s, as shown in
Figure 4g–i, respectively. In
Figure 4i, SS3 is developed prior to approximately 200 s and DFSS is presented later than 200 s, where the high frequency of DFSS is approximately 20 s and the low frequency of DFSS is approximately 100 s. Additionally, two conditions of the stable regime were investigated at
= 0.26 m/s with
= 1.48 and 1.97 m/s, as shown in
Figure 4j,k.
pB ranges from 0.2 to 0.3 bar, which is completely different from that of severe slugging, which fluctuates between 0.2 and 0.6 bar. Lastly, a controlled stable condition was implemented. After SS1-1 was generated at
= 0.09 m/s with
= 0.7 m/s, a choke valve installed at the top of the riser was operated to eliminate the severe slugging. Choking the valve transforms unstable flow into stable flow by increasing the pressure difference across the choke [
5,
21] with a proportional-integral-derivative controller. The data measured after flow stabilization were applied to a classification analysis of the stable flow regime. For each severe slugging condition, 1000 data samples were collected, considering that the occurrence interval of severe slugging was approximately 100 s. As a result, approximately 100 cycles of severe slugging were obtained. Meanwhile, 250 samples were acquired for conventional stable flow and 500 samples were measured for controlled stable flow, considering the stabilizing time. Because there was no cyclic process for stable flow, the number of measured data was smaller than that of severe slugging.
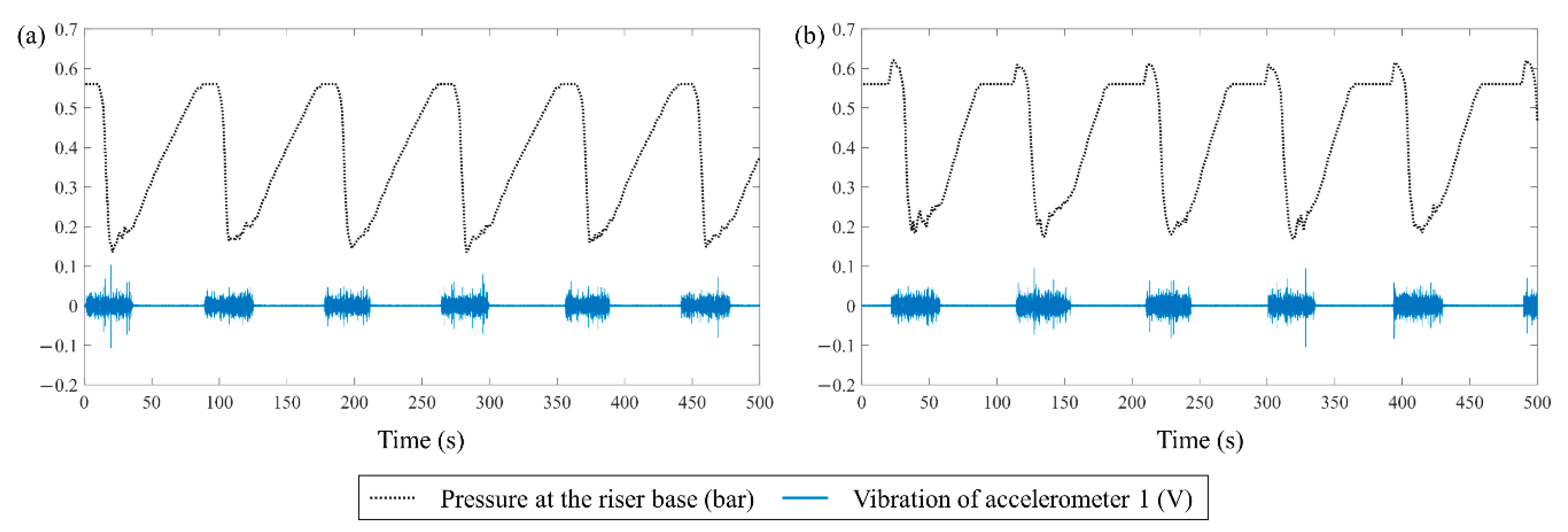
Figure 5a,b provide comparisons of
pB and a signal from accelerometer 1 near the riser base during severe slugging cycles of SS1-1 at
= 0.09 m/s with
= 0.59 m/s and SS1-2 at
= 0.19 m/s with
= 0.59 m/s, respectively. The black dotted line indicates
pB and the blue solid line shows the vibration signal of accelerometer 1. Although the signals of vibration and pressure are not perfectly synchronized owing to the different data acquisition systems, they present comparable trends of severe slugging. When the liquid starts to accumulate at the riser, which is a starting point of pressure increase, the vibration drastically decreases because an FIV diminishes rapidly. After the blowout, the FIV is developed as the gas penetrates the riser and the pressure starts to decrease. In accordance with the cyclic severe slugging process, the vibration signals also reveal cyclical trend.
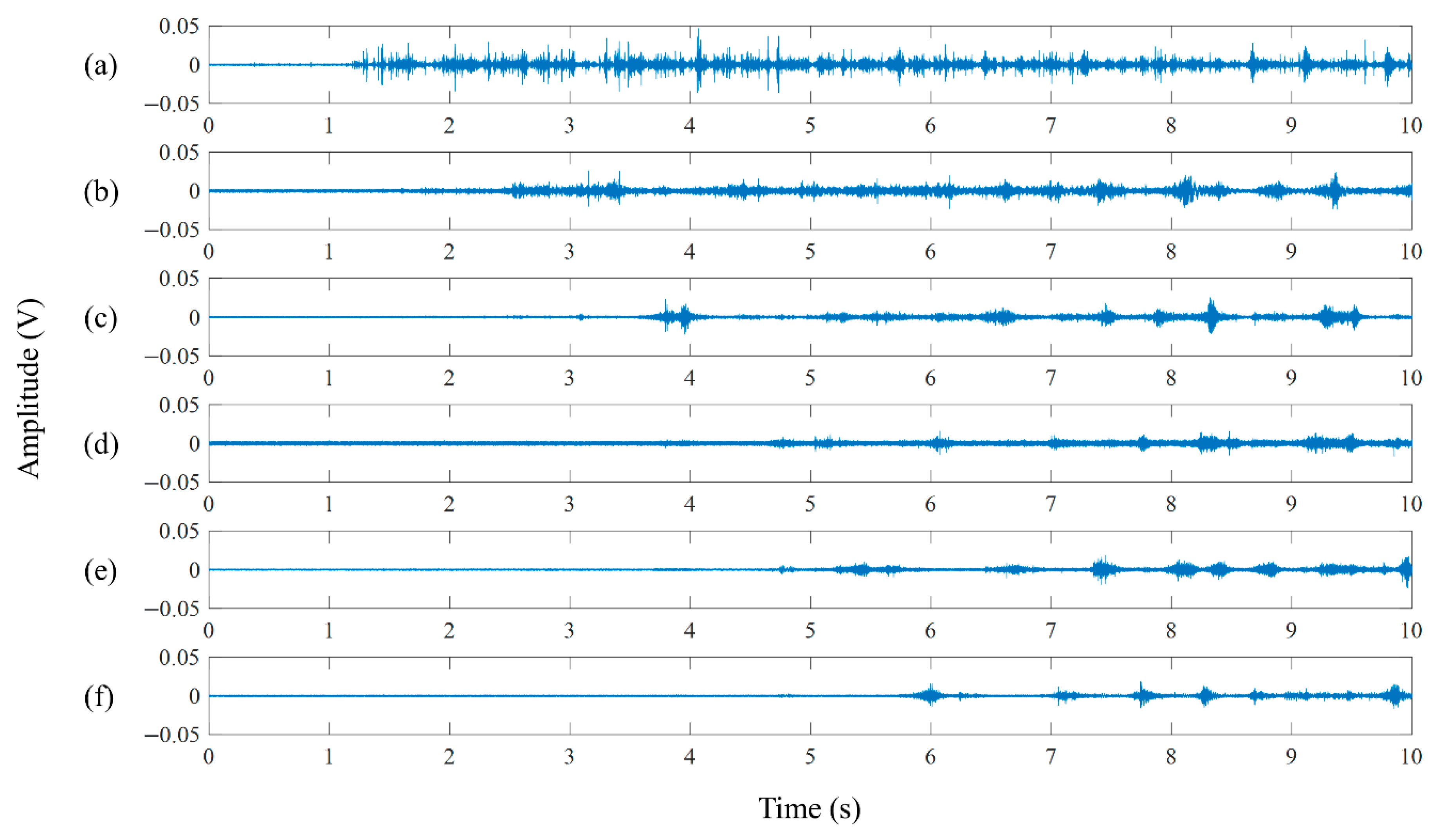
Figure 6 illustrates vibration signals of SS1-1 at
= 0.09 m/s with
= 0.59 m/s near the blowout process, when the FIV begins to be generated. The signals acquired from accelerometers 1–6 are depicted in
Figure 6a–f, respectively. The FIV after the blowout is acquired from approximately 1.2 s for accelerometer 1 and 5.6 s for accelerometer 6. The internal two-phase FIV is mainly due to the presence of a flow-turning section such as pipe bend. It changes the momentum flux and pressure fields in a short time, thereby generating large forces [
22,
23]. Consequently, in the pipeline-riser system of this experiment, the main source of vibration was located at the bottom of the riser, at the turning zone connecting the inclined pipeline and the vertical riser. As shown in
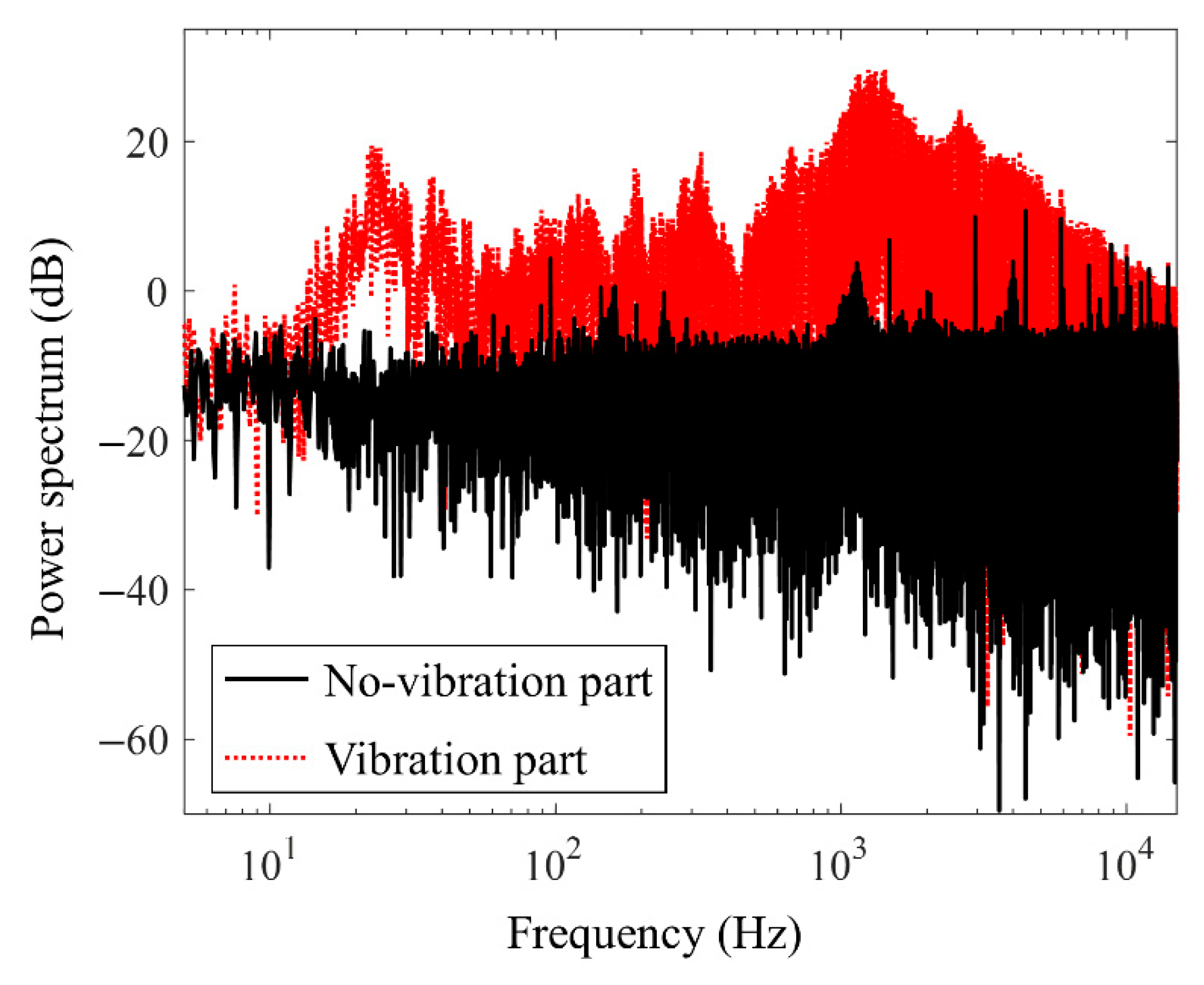
Figure 6, the signal amplitude of accelerometer 1 close to the bottom is larger than those of the other sensors. In addition, to investigate the characteristics of the flow noise source, power spectra from the signals of accelerometer 1 about SS1-1 at
= 0.09 m/s with
= 0.59 m/s are investigated.
Figure 7 shows two typical spectra of the no-vibration part during liquid accumulation (black solid line) and the vibration part after the blowout (red dotted line), which are produced using signals of length 10 s. The x-axis represents the frequency on a logarithmic scale and the y-axis shows the power spectrum in decibels. As shown in
Figure 7, the energy of the FIV dominates below 10 kHz, especially near 1.5 kHz and 20 Hz.
6. Summary and Conclusions
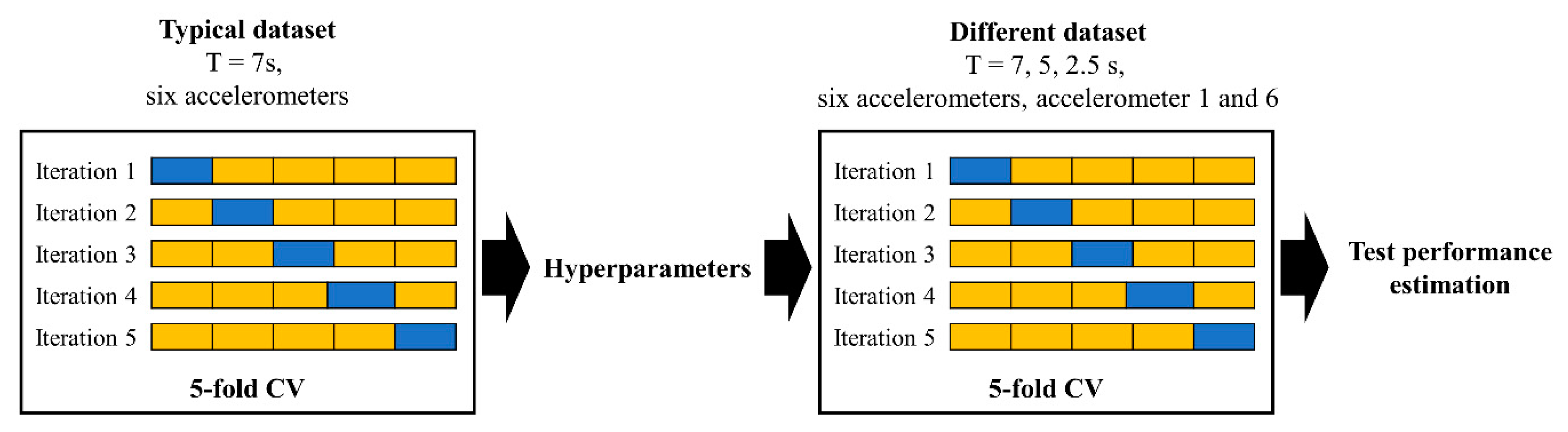
In this paper, the severe slugging recognition in a pipeline-riser system using signals from accelerometers was proposed. Vibrations were obtained from the bottom to the top of the vertical riser under various environmental conditions generated by different water and gas superficial velocities. For online recognition of the flow regime, the simple features of mean, variance, skewness, kurtosis, RMS, and fifth-order LPCs were extracted from the absolute values of the vibration signals. The SVM and NN were used for binary classification and the NN was adopted in multiclass classification to recognize stable flow, SS1-1, SS1-2, and an irregular transition between SS3 and DFSS. The hyperparameters were optimized to minimize the five-fold cross-validation errors.
Our classifiers show the best performance in signals of length 7 s with six accelerometers. Although the performance degenerates for short time signals, the averaged accuracy of binary classification of 2.5-s-long signals with six accelerometers is quite high, at 97.89%, using the NN. The recognition rate of stable flow tends to be higher than that of severe slugging, because separating the vibration parts of severe slugging and stable flow is more intricate. When the number of accelerometers decreases to one, the accuracy of accelerometer 1 near the riser base is higher than that of accelerometer 6 close to the top of the riser. This is because the major source of FIV is located at the bottom of the riser, the flow-turning section of the structure. As a result, signals from the accelerometer near the riser base have a clearer distinction between the vibration and no-vibration parts, thereby yielding better classification performance. The averaged accuracies for multiclass classification using six accelerometers range from 94.9% to 97.06% according to the signal length. As identifying each severe slugging is more complicated owing to their similar tendencies of the vibration parts after the blowout, the recognition rates of multiclass classification are slightly lower than those of binary classification.
The success of early recognition of severe slugging is based on the measuring device and simple features. Our results show that the use of signals from accelerometers leads to good performance, as vibration measurements are a great discriminator in the no-vibration parts during the liquid accumulation state of the severe slugging cycle. Based on our analysis, adding information from accelerometer signals can further improve the accuracy and reliability of established severe slugging monitoring systems.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}