1. Introduction
The unplanned development of urban centers often is associated with severe socio-economic problems. Such uncontrolled urban growth typically causes significant stress on city structures due to the unexpected demand of various resources and services. One of the most affected sectors is the urban transport systems, in which inefficiencies may lead to many negative consequences. Among them are the increase in greenhouse gas emissions and many hours stuck in traffic congestions, thus resulting in health issues and monetary losses. For instance, the congestion cost in the United States, the United Kingdom and Germany were almost
$461 billion in 2017 [
1].
One approach to prevent these problems is the development of an Intelligent Transport System (ITS). An ITS uses communication, processing and sensing technologies to improve the urban traffic and consequently the flow of vehicles in the urban road. Moreover, an ITS does not only aim to provide traffic management services (for instance, to prevent traffic jam) but also security management services and infotainment applications to drivers, passengers and pedestrians [
2,
3,
4,
5,
6]. In ITS, vehicles are equipped with sensors (e.g., GPS and Galileo), processors and wireless communication modules. In this way, vehicles can communicate with other vehicles through vehicle-to-vehicle (V2V) communication and with the network infrastructure (e.g., RSU—Road Side Unit) through vehicle-to-infrastructure (V2I) communication.
ITS services and applications have intrinsic characteristics regarding the way they process, store and disseminate a vast amount of data generated in ITS [
7,
8,
9]. Theses characteristics imply in some issues for ITS services requirements such as mobility, frequent network disconnections, networking latency and end-to-end responsiveness time. Thus, designing ITS services that have a required quality of service (QoS) is a challenge [
8,
9,
10].
The main benefits to designing an ITS with Fog paradigm are [
11]:
low latency–some ITS data have strict time constraints, such as data for re-route systems;
predominant wireless access–modern ITS systems heavily rely on wireless communications;
wide geographical distribution–ITS has sensors geographically spread. However, the scope of the data gathered is restricted to the location of the sensors that generated such data;
real-time interaction–re-routing systems have real-time requirements;
mobility–an ITS is used to optimize the mobility of vehicles in the city. Although, the ITS may also leverage mobility to perform data delivery activities to various stakeholders;
scalability–an ITS needs to be scalable, due to the high number of vehicles and sensors; and
extensibility–if the city grows, the ITS infrastructure also needs to grow to support the expanded region. These characteristics enable Fog Computing to offer an ideal platform for highly dynamic and heterogeneous ITS environment [
9].
Generally, route suggestion services rely on data from specific regions, as traffic conditions, which may be irrelevant to other regions of a city. In this scenario, such service may exchange a large amount of data from heterogeneous data sources [
7,
12] to monitor the traffic conditions in a particular region. Moreover, the data may have real-time constraints and it can be disseminated using different communication technologies [
13] and considering the dynamic topology, frequent network disconnections and cooperative communication [
14]. It is worth noticing that sending data to a single central entity (e.g., Cloud) is a waste of system resources, such as network bandwidth. Moreover, data transmissions are more vulnerable to specific problems, such as delays, data loss, scalability, and communication disruption. Hence, route suggestion services in ITSs are not well suited to centralized architectures such as Cloud computing [
8,
12,
13,
15,
16,
17].
In this scenario, a route management service that takes advantage of the features of the Fog computing paradigm is extremely desirable in ITS. This happens because the Fog computing paradigm moves its resources (storage and processing) to the edge of the network, thus bringing the available resources as close as possible to end-users without the assistance of the Internet [
11]. The Fog computing paradigm is based on entities named
Cloudlet which have processing and communication capabilities (e.g., micro-data centers) and are geographically distributed to be closer to the access networks [
18]. Since Cloudlets resources are closer to the end devices, they allow a faster response time and a local service decision. Thus, the Fog paradigm provides geo-computation and faster and less costly communication when compared to a Cloud. Although the Fog paradigm has lower computing capacity when compared with the Cloud, they can use the Cloud data centers whenever necessary. This approach forms a multi-tier architecture (see
Figure 1), which is hierarchically organized with varying types of capabilities and end-user proximity. Cloud computing, represented in
Figure 1 Tier
A, possesses a more powerful resource, however the longer distance to retrieve data and the presence users beyond congested connections due to the use of the Internet often limit the real-time services and increase the network cost, especially considering a high dynamic vehicular network topology. Fog paradigm and Cloudlets environment are shown in
Figure 1 Tier
B, where the resources are closer to the end devices permitting a faster response time and a local service decision. Finally, users and sensors devices (e.g., vehicles, road sensors, cameras) are represented in
Figure 1 Tier
C.
In the literature, several studies address the problem of route management in urban centers [
19,
20,
21,
22,
23,
24,
25,
26]. In most of them, this kind of service employs an architecture for carrying out the monitoring and traffic control that relies on information about the vehicles, as well as the characteristics of the routes. However, these architectures also have to exchange, process and store a considerable amount of data generated by the devices that are embedded in the vehicles and that are used for monitoring the city traffic. Thus, problems related to processing (e.g., load balance, response time) and data transmissions (e.g., delays, data loss and communication disruption) become a concern. Besides, in route suggestion services, the response time to perform the decision-making process must be within an acceptable time frame so that the information is still useful in order to the vehicle’s driver to carry out the necessary route changes.
Given the aforementioned limitations, this article proposes a traffic service to control congestion, named FOXS–Fast Offset Xpath Service, which is based on the Fog computing paradigm. FOXS uses the Cloudlets to monitor the traffic conditions and to calculate the vehicle route. In this way, FOXS allows that the computational power resides closer to where it is most required, thus dividing the system load and increasing the overall scalability of the system and holding the capability to collect, process and store large volumes of data. For that, FOXS uses the network infrastructure Road side Units (RSUs) as a Cloudlet entity, which is deployed in the city to manage the traffic of vehicles. For its operation, a mechanism that gathers all necessary data from vehicles and road sensors was developed. Such mechanism optimizes the delivery rate and reduces the number of messages in the system. Then with the data collected by the corresponding Fog entities, the level of congestion of the roads is estimated. Finally, according to the conditions of the roads, the corresponding Fog entities calculates a new route as a suggestion.
This article was based on our previous work [
27]. It should be stressed that through an analysis of the base work, we improved and developed new methodologies and techniques to make FOXS more efficient. Some of the improvements are the increase in the message delivery rate, the reduction of the number of necessary RSU to fully cover the scenario and the traffic classification for better suggestions of routes to vehicles.
In addition, we extend the previous experiments proposed in Reference [
27]. Other routes services proposed in the literature were implemented and compared with FOXS. The results obtained, evaluated in different and realistic urban scenarios, demonstrate that the use of congestion control services can reduce losses due to the traffic jam. In particular, FOXS reduced the stop time by up to 70 %, the planning time index by up to 49 % and, CO
emissions by up to 29 %. The network also improved with a reduction of the packet collisions (up to 11.5 %) and the application delay (up to 30 %).
The remainder of this article is structured as follows.
Section 2 presents an overview of the literature about approaches to minimize congestion in urban centers.
Section 3 presents the FOXS traffic service and its design and components.
Section 4 presents the performance evaluation of our proposal, along with the methodology used and the results. Finally,
Section 5 discusses the conclusions and future work.
2. Related Work
This section presents related works that address the problem of route management, that is, traffic congestion management of vehicles in urban centers. In the last few years, such a problem has been explored by several works [
19,
20,
21,
22,
23,
24,
25,
26,
28,
29]. However, we have not found works that address such problem through the Fog computing paradigm to improve system performance, such as the load balancing (network, processing), the response time and the network load.
There are several works [
30,
31,
32] that present methods for describing and predicting traffic behavior. Hussein et al. [
30] proposed a model for predicting short-time traffic conditions using a neural network approach (time lagged recurrent neural network—TLRN). Reference [
31,
32] proposed a stochastic model that assists the prediction of traffic flow uncertainties (e.g., weather conditions, public holidays, special events). These models can be used as an additional feature for routing algorithms thus improving their efficiency. This would be an advantage for FOXS, since the Cloud could run this batch and thus inform the traffic forecast in each region separately for each RSU-Cloudlet.
The system proposed in Reference [
21] is responsible for traffic monitoring and vehicle re-routing to decrease the traffic congestion of vehicles. The goal is to reduce the driver’s travel time, as well as the CO
2 emissions and fuel consumption of vehicles. To this end, real-time data about vehicular traffic conditions, such as position, speed and direction are gathered by a centralized system through vehicle-to-infrastructure (V2I) communication. Four steps are periodically executed in the traffic care system: (a)
Data collection and representation, which describes the network using a directed graph, in which the weights are the average travel time; (b)
Congestion prediction is the service that periodically checks all road segments to detect signs of congestion; (c)
Selection of Vehicles to Be Rerouted selects candidate vehicles near the congested roads; and (d)
Choose alternative routes for each previously selected vehicle. The authors employ three strategies for calculating new routes: (i) Dynamic Shortest Path, which calculates the route with the lowest travel time; (ii) Random
k Shortest Paths, which selects the
k lowest travel time path routes and assign, at random, one of them to the vehicle; and (iii) Entropy Balanced
k Shortest Paths, which is an enhancement of Random
k Shortest Paths, in which it is considered the impact of the selected road on the future density of the road. However, these strategies have the following drawbacks: (i) congestion in other places due to the suggestion of routes to the same area; (ii) long routes can be selected to reduce the traffic of vehicles in another area; and (iii) the use a central server requires a substantial computational resource and network communication, so the use of a central server is not salable.
The work described in References [
24,
25] proposes services for real-time traffic management with route planning and congestion detection. CHIMERA [
25] was based in SCORPION [
24] and its main difference is in the route suggestion. In Reference [
25], an intelligent traffic system was proposed which improves the overall spatial utilization of the road network to reduce the average vehicle travel costs, named CHIMERA. In CHIMERA, vehicles provide their information (ID, current position, route and destination) to an RSU entity through a single-hop long-range communication, such as 4G and LTE. For this, CHIMERA was modeled into three main parts: (i) congestion detection;(ii) traffic classification; and (iii) route suggestion. CHIMERA perform congestion detection and traffic classification using
K-NN (k-nearest neighbors) according to the average speed and the density of the path. As output, it informs the road classification based on the traffic condition (e.g., free-flow, slightly congested, moderately congested and severely congested). Finally, CHIMERA uses the K-Shortest Path-based algorithm for the route choice. However, different from this article, these solutions [
24,
25] did not propose a message scheduling mechanism to reduce problems in data transmission, such as packet collision. Another problem, solved in this article, is that communication between RSUs is not implemented. Thus, the RSU is not aware of the traffic conditions in other regions of the map, thereby limiting the efficiency of the routing system.
Meneguette et al. [
33] proposed a solution, named INCIDEnT (INtelligent protocol of CongestIon DETection), based on an Artificial Neural Network (ANN) to estimate congestion level and maximize the urban traffic flow. The ANN uses the average speed and the density of vehicles on the road as the input of the system to classify the traffic and suggest new routes for drivers. The congestion is classified in three levels: Free; Moderate and Congested. Finally, the classification data are disseminated by all vehicles on the road through periodic beacon messages. When a vehicle receives a message about a road congestion level, the ANN can decide whether to keep its current route or calculate an alternative route. However, the solution does not have full knowledge of the map neither a method to avoid the overlapping routes, which can in turn generate a new traffic jam. Another problem detected is that it does not implement any broadcast suppression mechanism, thus decreasing its efficiency, especially in a high-density scenario.
Doolan et al. [
34] proposed a VANET (Veicular Ad Hoc Networks) routing solution—named EcoTrec—aimed to reduce the CO
emission without significantly affecting the travel time. For this, each vehicle periodically disseminates data about its fuel consumption, current route and average road speed. Thus, EcoTrec determines the roads conditions and in a distributed way, each vehicle calculates a new route. To avoid the various vehicles always attribute the same best route, EcoTrec randomly assigns the second-best route to some vehicles. The EcoTrec architecture possesses three main parts: (i) VehicleModel with the vehicle and embedded sensors characteristics; (ii) a RoadModel with a road representation and characteristics that are allocated in the central server; and (iii) a TrafficModel with the traffic condition based on the VehicleModel and RoadModel characteristics. However, all vehicles in the system send messages to the neighboring vehicles and the central server to update the TrafficModel. Moreover, the vehicles compute their route based on the TrafficModel received from the server. Thus, the scalability of the system is compromised by a large number of messages exchanged.
Younes et al. [
26,
35,
36] proposed ECODE (Efficient road Congestion Detection protocol) and the ICOD (intelligent path recommendation protocol), that uses V2V and V2I communications to detect traffic congestion on each road segment. ICOD [
36] was based in ECODE [
26,
35], however it has a mechanism that enables users to choose which type of route the system will provide according to users’ concerns and priorities (e.g., fuel consumption, traveling time, road segment context). For that, RSUs are placed in every intersection and, using V2V, vehicles send an advertisement message (ADV) containing its information (e.g., ID, Speed, location, direction, destination and timestamp) to neighboring vehicles. When a vehicle receives an ADV, the information received is aggregated to the neighbor report table (NR) to calculate a traffic monitoring report (TMR) that informs the average road speed, the density and the estimated travel time. Furthermore, the closest vehicle to any RSU sends the TMR to that RSU. When the RSU receives the TMR, it checks its local information to determine the best direction for each destination, then it disseminates a RecomReport message. Finally, when a vehicle receives a RecomReport message, it changes its route towards the destination and forwards the message to the one-hop neighbors. Differently from FOXS, ECODE does not possess full knowledge of the map, thus causing the same problem in Reference [
33], and despite it having a forward control message mechanism, the large number of necessary messages to perform its work causes scalability constraints as in Reference [
34].
Wang et al. [
37] proposed a solution called Next Road Rerouting (NRR) to alleviate urban traffic jam. To calculate a route, NRR applies a heuristic based on a cost function that uses information like road occupancy, travel time, distance to destination and the congested road. Vehicle routing is made in two steps. In the first step, the intelligent Traffic Light (iTL) module checks whether any of its intersection roads is congested. If congested, iTL sends beacons informing the vehicles about the congested road. Thus, vehicles that pass through this road request an alternative road to iTL. In the second step, when the vehicle receives the alternative road, this vehicle requests to central server a new route from the road suggested by iTL to the final destination. NRR has a 3-tier architecture with (i) Central Manager located at the Traffic Operation Center, (ii) intelligent Traffic Light (iTL) with loop detectors disposed on each intersection and (iii) local computers residing in the middle tier connected to iTL and Central Manager. However, this solution depends only on iTL to acquire road traffic information, thus being necessary the installation of iTL in all intersections. Also, NRR needs an Internet connection to work correctly, while this assumption is not necessary for FOXS.
Jeong et al. [
38] proposed a cloud-based system for traffic optimization called Self-Adaptive Interactive Navigation Tool (SAINT). In this system, vehicles report the road traffic conditions to the traffic control center hosted in the Cloud. RSU and eNodeB (from cellular network) require Internet connections to communicate with the Cloud, thus vehicles are equipped with 802.11p and 4G. To reroute vehicles, SAINT uses a modified Dijkstra’s algorithm where the weight function takes into account the vehicle’s delay to reach the roads of the route. Thus, the probability of a route becoming very popular and causing a new congestion is reduced. However, such solution has some limitations. For instance, vehicles must continuously inform the conditions of the routes through the Internet connection to the Cloud. Another limitation is the Dedicated Short-Range Communications–DSRC standard communication used by vehicles since it does not have any mechanism to work correctly in high-density scenarios, such as urban centers.
Table 1 shows the features of the related works and highlights the main contributions of this article. It is observed that no work uses the Fog computing paradigm to improve system performance. Because of these features, we developed a routing service, named FOXS, that overcome the gaps of existing approaches. Therefore, FOXS uses a Fog computing paradigm allowing the cooperation of RSUs, distributing the network and processing capabilities.
3. FOXS–Fast Offset Xpath Service
This section presents a traffic management service for route suggestion: FOXS, Fast Offset Xpath Service. FOXS is based on the Fog computing paradigm, which allows distributing the computer and communication resources among ITS components using the various computational entities, as presented
Figure 2.
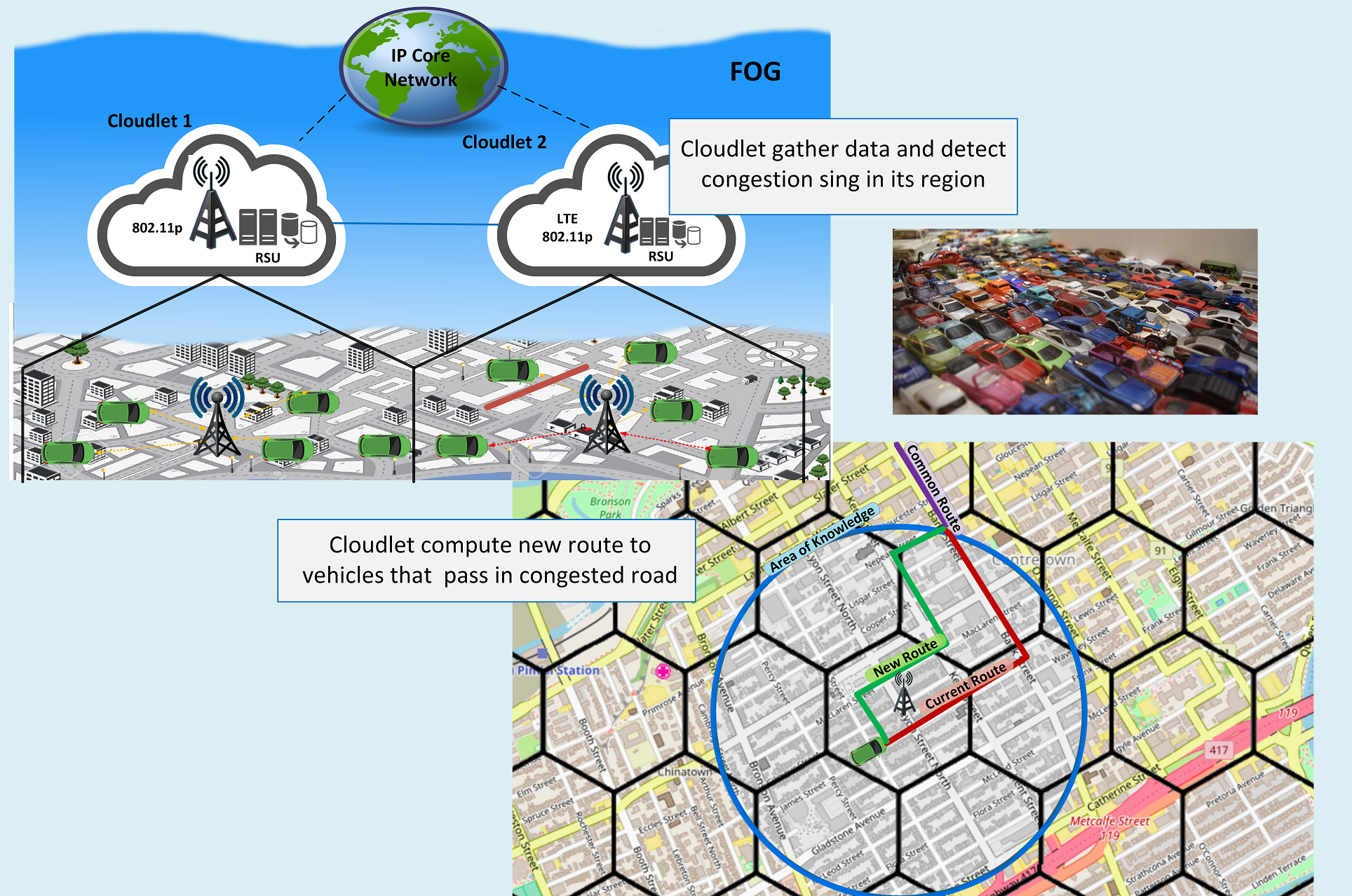
The FOX is composed of two main components, Vehicles and Cloudlets. Vehicles have communication capabilities and embedded sensors (e.g., GPS) that are responsible for collecting data about road conditions as well as receive/request new routes. Cloudlets are implemented as RSU and the Cloudlet set forms the Fog computing environment (see
Figure 2, Label A). Cloudlets are spread in the scenario according to the RSU communication range to reach full coverage of the entire map. Without loss of generality, the RSU deposition follows the cellular antennas deployment (hexagonal areas). Each Cloudlet is responsible for collecting, storing and analyzing the data (vehicles position and velocity, road occupancy, level of congestion) of a specific region and compute routes for vehicles in its region (see
Figure 2, Label B). By considering specific areas, the data is kept closer to end-users (vehicles) and road sensors, resulting in a more efficient processing, communication and quick response time. As seen in
Figure 1, the Cloudlet is in Tier B and Vehicles are in Tier C.
It is important to point out that the spatial context-aware characteristics allow that each Cloudlet to be independent of each other. To increase the flexibility and environment communication penetration, the Cloudlet can be equipped with various communication technologies (e.g., LTE, 802.11p) and multiple antennas (
Figure 2, Label C). For a better understanding of the FOXS’s design, three steps are presented below, as shown in
Figure 3: (i) Data Gathering,
Section 3.1 describes the data gathering process, the algorithms and mechanisms developed for this role; (ii) Data Processing,
Section 3.2 presents the data transformations and road traffic classification; and (iii) Service Delivery,
Section 3.3 describes the algorithms and methods used to compute the new route and delivery it to the users.
3.1. Data Gathering and Communication
In order to perform Data Gathering, we need to deploy the RSU infrastructure, that is, the Cloudlets. After the deployment process, the Cloudlet gathers road/vehicle data.For this implementation, we use a set of RSU with Cloudlet capability spread homogeneously in the environment to achieve full coverage of the entire map (see
Figure 4). Each Cloudlet is composed of a single RSU with communication capability to others RSUs and with vehicles. The communication between RSU is made by wire and RSU—Vehicle communication uses 802.11p wireless communication. Vehicles are equipped with GPS and On-Board Unit (OBU), which is a device mounted on vehicles that has processing power and allows DSRC communications with other OBUs or RSUs. Cloudlets are responsible for collecting all data generated inside its communication coverage (represented by hexagons in the
Figure 4).
Cloudlets are distributed accordingly to their coverage by applying the Hexagonal Binning ([
39]) algorithm to reach an efficient relationship between the number of RSUs versus city map size. This algorithm is based on cellular base-station deployment models [
40]. This strategy is consistent with the Fog paradigm once the map is partitioned, sharing the users between each Cloudlet and the resources are brought closer to the users. The algorithm for Cloudlet distribution is based in the dimensions of the map and the Cloudlet coverage. So, the number of RSUs and its coordinates are assigned. If an RSU is assigned to a region that does not have any road, it will be removed.
For the service to work correctly, the components of the traffic management system, such as Cloudlets and vehicles, send control data periodically (beacons) informing about the roads traffic conditions in their region and other types of data that FOXS uses. The acquisition of this data is executed in a distributed way using the communication capability of the Cloudlets. Cloudlets send beacons informing its position, the route interval for that region and the list of roads congested inside its region. Vehicles use such information to find nearby Cloudlets to send traffic information and request a new route. The data sent are the vehicle speed, position, time spent to move on each road and its current route. These data are sent periodically through beacons to the closest Cloudlet. Once the Cloudlet receives data about a specific region, it uses with the proposal of acquiring knowledge to execute the traffic service. The data exchanged considering the proposed cloud-based architecture and the DSRC/WAVE communication protocol is illustrated in
Table 2. Our propose takes advantage of the DSRC/WAVE control and service channels to better use the wireless resources.
In order to improve the communication between vehicles and RSU, a mechanism for message scheduling was developed to increase the packet delivery rate in the architecture using a DSRC/WAVE communication standard. The mechanism (presented in Algorithm 1) has the objective of scheduling the time of sending the packets to the 802.11p MAC layer to avoid the resynchronization problem ([
41]). The mechanism also schedules the messages to be sent according to their size and the node bandwidth (line 15, Algorithm 1). For this, there are two queues for the messages (lines 4 and 5), one to the control channel (CCH) used to send control messages as beacons and another to the service channels (SCH) used for all other messages in the service. Algorithm 1 verifies the channel type of the message (lines 7 to 10) then assigns the send delay time according to the last message transmitting time in the corresponding queue (line 15). If the queue is empty, a value of zero is assigned to the delay (line 12). Then an additional delay is calculated based on the active channel (lines 17 to 27). Thus, this mechanism ensures that when the network layer sends a message to the MAC layer, the message will be sent promptly.

3.2. Data Processing
In this phase, the system processes the collected information from the previous step. Once the map is all covered by Cloudlets, each Cloudlet has the responsibility of collecting and processing only road data within its coverage. Thereby, limiting the data gathering/processing to a smaller region, reducing the cost of communication and making a processing load balance between Cloudlets in the system.
However, as described in Reference [
4], the size of the region (amount of information) that will be used to compute the new route have an impact on the quality of the route. Therefore, a router region that is just the radio coverage of the Cloudlet may be too small for efficient routing. To solve this problem, the Cloudlet acquires information about roads that are in the coverage of other Cloudlets in order to improve the routing solution by increasing the amount of information (with roads and their features and current traffic situation) that the routing algorithm will use. This additional knowledge area contains information of roads that are under the responsibility of other Cloudlet and is called Area of Knowledge (AoK) (inside the blue circle in
Figure 4). The Area of Knowledge is at least the size of the Cloudlet coverage area. The size of the AoK affects the performance of the service, since a larger AoK (e.g., more roads to route) results in a better result but the computation time is increased.
Each Cloudlet periodically updates the weight of each route based on information gathered by vehicles inside its coverage. A multi-weight directed graph is used to represent the AoK, where V is the set of intersections within range of the AoK (representing the vertices) and E is the set of roads connecting the intersections (representing the edges). The weight of each road of G where: i is the relation of the maximum allowed speed in the road inversely proportional to the speed at which vehicles travel on the road. Therefore, if the vehicle speed is close to the maximum speed allowed on the road, the weight of the road is lower; j is the road occupancy that is inferred through vehicle’s positions sent by vehicle beacons.
The periodic road weight updating is done in the following way. The Cloudlet makes averages of the data sent by vehicles that pass in a specific road for a time interval. Next, is used the Exponential Moving Average (EMA) to obtain the new road weight. The EMA is used to smooth out a large oscillation in the road weight that may occur toward recurrent events such as a vehicle parking or stopped for a short period of time. Thus, implying in an abrupt increase of the road weight implying on the road choice in the routing process.
The road weight
i is used by the routing algorithm (described in the next section (
Section 3.3)) and the weight
j is used with the
i to road classification. The road classification is used to inform vehicles which roads have sing of congestion so, request a new route based in this information. The road classification is based on Level-Of-Services (LOS) present in the Highway Capacity Manual (HCM) [
42]. The HCM uses the speed and density of vehicles on the roads to measure the capacity and quality of traffic. The HCM classify the congestion into six levels between level A as free-flow to F as congested flow. Each LOS level defines the minimum and maximum speeds for each level based on the maximum speed allowed on the road and by maximum occupancy capacity. We consider a road congested when the road speed is classified as LOS C or the road occupation is classified as LOS D. These threshold levels were chosen because that is when road presents signs of emerging congestion. Thus, FOXS takes action in order to avoid the formation of congestion.
Note that each Cloudlet only classifies and updates the weight of the roads in its coverage area. To update roads on its AoK outside its coverage, Cloudlets share the road knowledge between them using publish/subscribe paradigm [
43]. Subscribers register in events and asynchronously they are notified of events generated by publishers. The publish/subscribe protocol developed to FOXS has based on MQTT (Message Queuing Telemetry Transport) [
44]. For that, all Cloudlets in the system are publishers, subscribers and the Cloud server is the broker (see
Figure 5). In the beginning, each Cloudlet subscribes in the road update process by sending a road list including all roads inside its AoK except for roads inside its radio coverage (represented by hexagons). This list is sent to the Cloud server that has global knowledge of the map division (represented in
Figure 5, Label A). After, the Cloud server notifies each Cloudlet (publisher) that is responsible for each road from the received list (see
Figure 5, Label B). Cloudlets (publisher) notify all Cloudlets that are subscriber about road updates (see again
Figure 5, Label C). Note that several Cloudlets may be intersected on the same path. The publish-subscribe method is an intesrting choice for ITS because of its asynchronous nature. The method also has the ability of work with context-aware applications, since interests flows considering a specific geographic region [
45].
After, all these update processes, the Cloudlets disseminates in beacon messages the list of congested roads inside of its AoK. Thus, FOXS takes action in order to avoid the formation of congestion.
3.3. Service Delivery
In this phase, each Cloudlet performs the detection and control of congestion by calculating alternative routes to the vehicles. Thus, decreasing the load on the congested roads. Each vehicle, periodically, checks if it will pass through a congestion road. For that, the vehicles receive a beacon message sent by the Cloudlet with a list of congested roads. This list only contains roads belonging to the Cloudlet’s AoK.
Hence, at each route interval, the vehicle checks if its route passes through a congested road. The service delivery mechanism is illustrated in
Figure 6. If it does not pass (
Figure 6 stage A), the router interval is restarted. Otherwise, a message is sent to the closest Cloudlet requesting a new route and recovery time is started (
Figure 6 stage B). The recovery time is a fault-tolerance mechanism that checks if the vehicle has received the requested route within a specific time interval. A new request message is sent in case of failure to receive (
Figure 6 stage C). When the vehicle receives the new route, it is assigned and the route interval time is started (
Figure 6 stage D).
Therefore, the Cloudlet computes a new route for the requesting vehicle in the scope of its AoK, that is, only using roads within the blue circle. Thus, the rerouting process does not change the part of the route outside of the AoK in purple (standard route). As we can see in
Figure 7, the routing of vehicles (e.g., green car) is performed considering its current position (point
A) until the last road in its current route that is within the AoK of the Cloudlet (point
B).
As we can see in the Algorithm 2, the routing process begins when the RSU receives a new route request from vehicles with their information (e.g., current position, route) (Line 4, Algorithm 2). With this, the graph G of AoK with its congestion characteristics (in Algorithm 2 as G) and the variable K describing the maximum number of alternative routes that must be calculated.
The route weight is calculated as the sum of the weights of all the roads contained in the path. Thus, the routes with lower weight are the most requested, possibly moving the congestion from one point to another. Aiming to avoid this problem, the service computes a set
of
K alternative shortest paths as possible routes the vehicle can take (Line 8, Algorithm 2). A route from this set is probabilistically selected based on the sum of the weights (
w) of its roads by applying the Boltzmann probability distribution [
46] (Line 9, Algorithm 2).

Boltzmann’s probability was chosen because it fits well with the vehicle route problem. Boltzmann probability uses the concept of temperature (e.g., route weight) to make a probabilistic choice of a route, thus preventing the algorithm to choose the same route multiple times. Thus, using the set of , the vehicle traffic is balanced between roads and the general performance of FOXS is maintained. The decision rules to choose the new route are presented in equations as follows:
J = set of vehicles on the scenario
= set of alternative routes of the vehicle j ()
= route i of vehicle j () and ()
= weight of route
= normalized value of
(
) defined by Equation (
1):
The
is the Boltzmann constant of vehicle
j for temperature
T, according to Equation (
2):
The
is the probability of choosing route
i of vehicle
j with the parameter of temperature
T, according to Equation (
3):
When , all alternatives routes have the same probability of being chosen, that is, the process approaches a uniform random distribution. When , the lightweight route has a high probability of being chosen.
The
is the route chosen
, the choice is made according to Equation (
4):
Once the route is selected, the system checks whether the last edge of the calculated alternative route is the destination of vehicle v (Line 10, Algorithm 2). If this condition is not satisfied, the new alternative route is concatenated to the remaining of the original route that lies outside the AoK of the Cloudlet that made the routing of v (Lines 11–12, Algorithm 2). After, the system sends a message to the vehicle with the new route.
When the requesting vehicle receives this new route, its navigation system verifies the satisfaction of the variable route size factor, which determines how much longer (in percent) the new route may be in comparison with the current route. If this route size factor does not satisfy, the vehicle maintains the current route. In this way, the system can limit the maximum size of the route, thus avoiding the increase of other traffic problems as the CO emission.

 ,
, 



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}