1. Introduction
Obtaining high-quality terrain images using aerial synthetic aperture radar (SAR) requires several conditions to be met. Firstly, the aircraft that carries the radar should move along an assumed nominal trajectory of flight, which in most cases is rectilinear. Secondly, the vehicle’s velocity must be constant during imaging. Failure to meet these requirements significantly increases the computational complexity or even makes imaging not possible. Miniature unmanned aerial vehicles (UAV) have a small mass and a limited maximum speed; therefore, meeting these requirements is extremely difficult in practical implementations. As a result, during radar data processing, it is necessary to apply algorithms aimed to compensate the radar position and the velocity deviations, referred as the motion compensation (MOCO).
The compensation can be achieved in two different ways. The first group of methods uses additional navigational equipment to determine UAV position and velocity deviations and to compute phase corrections for the received echo signals [
1,
2,
3]. These corrections are then introduced to the echo signals in an azimuth compression procedure [
4]. The second group of methods focuses on the analysis of the echo signals received by the radar sensor. The methods acting this way are referred to as the autofocus [
5,
6,
7,
8,
9]. They allow the user to achieve better results in terms of image focus but are more computationally demanding than navigational methods, which makes them difficult to use in real-time imaging systems.
The basic navigation system used to improve the quality of radar terrain images is the Inertial Measurement System (INS) [
10,
11,
12]. Echo signals corrections determined using INS allow one to reduce geometric distortions of images; however, they can be used only for short measuring sessions [
10], which is not convenient in real-world applications, where it is important to have smooth and undistorted images during long-term observation missions. The allowed duration of a session varies from dozen to several tens of seconds depending on the class of the inertial unit used, and it is related to the process of INS error accumulation.
The mentioned property of the INS prompted the authors to study and develop an integrated navigation system combining INS and Global Positioning System (GPS) to estimate the UAV position and velocity deviations. In the proposed system, the INS and the GPS data integration was implemented using a Kalman filter [
13,
14,
15,
16]. The algorithm proposed by the authors was modified in comparison to the solutions used thus far in MOCO procedures [
1,
2,
3]. In these systems, it is commonly assumed that INS and GPS receivers provide measurements with the same frequency and their solutions are available at the same moment of time. In general, however, these frequencies are different, which affects the measurement update phase of the filter. Moreover, the lack of INS and GPS synchronization makes it impossible to properly compute the measurement vector directly from INS and GPS outputs. Proposals for solving these issues are presented in the following sections of this article.
The layout of the remainder of this paper is as follows. A mathematical description of the INS/GPS system is given in
Section 2. The problem of the lack of INS and GPS synchronization and its proposed solution is also described here. The proposed algorithm of a modified Kalman filter is described in detail in
Section 3, and a procedure of tuning its parameters is discussed in
Section 4. Chosen results of testing the designed INS/GPS system using measured data are presented in
Section 5 and
Section 6. The obtained results are discussed in
Section 7.
2. System Model
When developing a Kalman filter, it is necessary to formulate a system model consisting of a dynamics model and an observation model. The dynamics model describes how the system state vector
changes in time [
13]:
where
is an index of discrete time,
is a state transition matrix from
to
moment, and
is the process noise vector. The observation model shows a relationship between the state vector and the measurement vector
[
15]:
where
is the measurement noise vector and
is the observation matrix. In the proposed system, the state vector consists of INS errors:
where
is the position errors vector in the
North-East-Down (NED) reference frame, also named
n-frame [
11],
is the velocity errors vector in the sensor’s frame (
s-frame) with reference to the inertial frame (
i-frame) expressed in the
n-frame, and
is the orientation errors vector in the
n-frame.
The dynamics model was determined using equations described in [
15,
17]. Finally, the transition matrix
has the following form:
where:
and where
is the specific force vector of the
s-frame in relation to the
i-frame, expressed in the
n-frame,
is the delta angle vector,
is the WGS-84 ellipsoid mean radius [
9],
is the period of acquiring new INS data (which equals Kalman filter prediction phase period), and
is a vertical component of the Earth’s gravity vector.
The process noise covariance matrix
, which must be known for implementing a Kalman filter, was determined using modified equations from [
15,
17]:
where:
where
are power spectral densities (PSD) of the accelerometers noises, and
are power spectral densities of the gyroscopes noises in the
n-frame. Initially, it was assumed that the power spectral densities of noises of the accelerometers and the gyroscopes were equal for all INS axes, and respective values were derived from the sensor manual [
18]:
In the integrated navigation system, the estimation of the reference system errors (INS) is possible due to the GPS receiver, which provides a redundancy of the measurement data. The process of integration, however, requires bringing INS and GPS measurements to a common moment of time and a point in space, which is neglected in solutions presented in the MOCO literature [
1,
2,
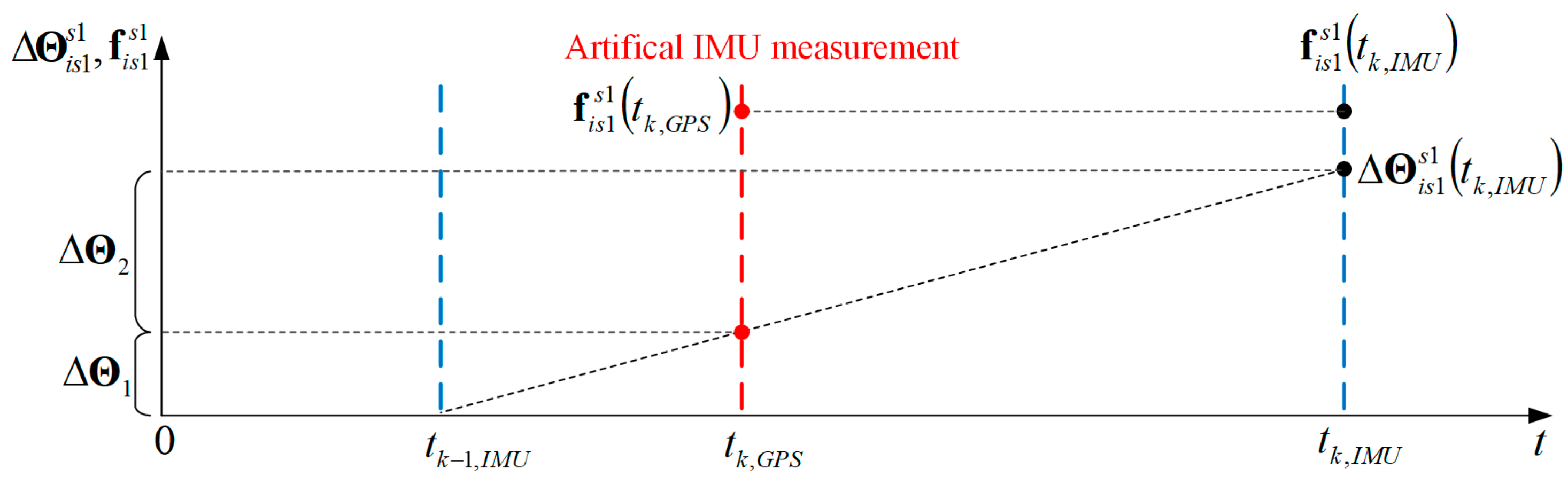
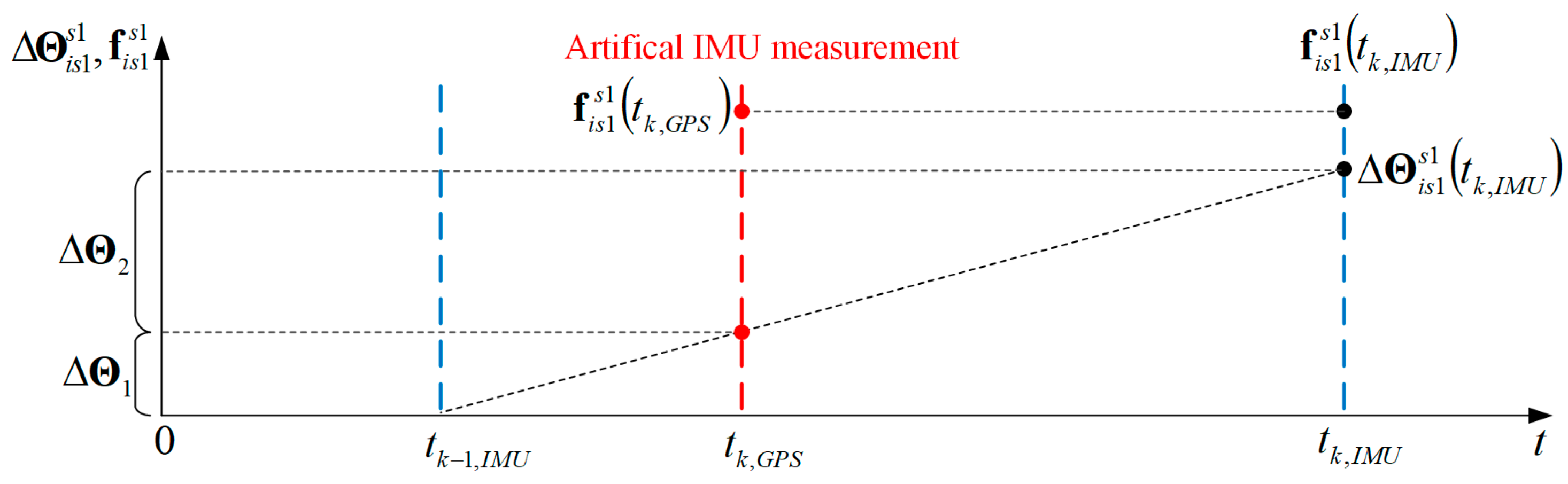
3] but is considered in the method presented in this paper. The data synchronization was achieved by interpolating results obtained at a higher frequency [from the inertial measurement unit (IMU)] to the time of data obtained at a lower frequency (GPS data). In this method, an additional (
artificial) IMU measurement was generated at a GPS data time (
), and then it was placed between two standard IMU measurements (taken at
and
). Considering the high IMU update rate (1 kHz) and the low dynamics of the UAV, the specific force vector was interpolated using a zero-order polynomial, as it was assumed that the specific forces remained constant during a single measurement period:
On the other hand, the delta angle vector
, measured in time interval
and released at the moment
is divided into two parts,
and
, representing angular changes in the subintervals
and
:
The interpolation procedure described above is shown in
Figure 1.
In the next step, the INS result at time was calculated using the interpolated IMU data, i.e., and . At the moment of GPS data time, the Kalman filter procedure presented in the following section was also executed. The INS solutions at the time were calculated using INS results from the artificial time , the measured specific force vector from the time , and the remaining delta angle vector .
Due to different mounting points of the GPS antennas and the IMU onboard the UAV, the measured data initially referred to different points in space. A translation of the results to a common point—a body frame (
b-frame)—origin was realized by converting the measured GPS antenna position
expressed in the Earth-Centered Earth-Fixed reference frame (
e-frame) to the
b-frame origin position
using known lever arm
between the
b-frame origin and this antenna:
where
converts a vector from the
b-frame to the
n-frame, and
converts a vector from the
n-frame to the
e-frame.
In the MOCO using an integrated INS/GPS system, there is a common assumption that INS and GPS produce data at the same frequency, which simplifies the construction of the measurement vector
[
1,
2,
3]. In our system, the GPS position was determined at 5 Hz, while GPS velocity was at 20 Hz. To use these measurements with their maximal frequencies, the measurement vector was divided into two vectors, a vector of position difference
and a vector of velocity difference
:
where
is the latitude of the
b-frame origin,
is its longitude, and
is its altitude above the reference ellipsoid (the upper index describes the system used to determine the respective coordinate, INS or GPS),
is the velocity vector of the
s-frame with reference to the
i-frame expressed in the
n-frame and measured by the INS, whereas
is an analogous velocity vector measured by the GPS receiver. This solution allowed us to use maximal sensor output update rates because—due to the independent treatment of velocity and position measurements—there was no need to limit the rate of velocity data to the rate of position data. The proposed approach, however, makes it impossible to use a classical Kalman filter algorithm, and therefore a sequential Kalman filter was used.
In the considered INS/GPS system, the observation matrix
is given as follows:
and the measurement errors covariance matrix
can be described using the formula:
where
,
,
are the variances of latitude, longitude, and altitude errors, and
,
,
are the variances of north, east, and down velocity errors of the GPS data. These variances were determined in our system during a 1 min pre-launch measurement session. The determined values of position and velocity errors standard deviations used to create the
R matrix were as follows:
,
,
,
,
,
.
3. Kalman Filter
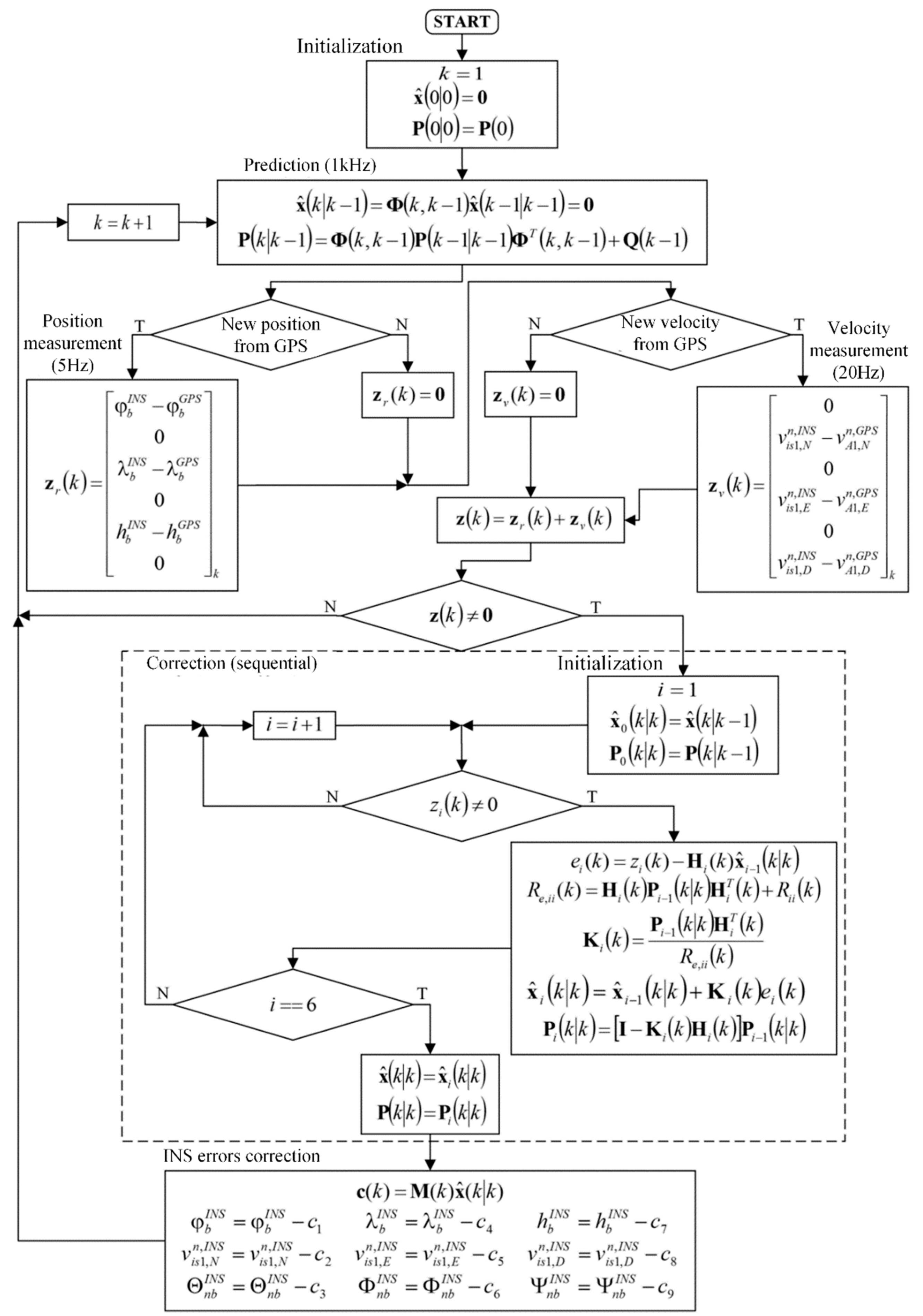
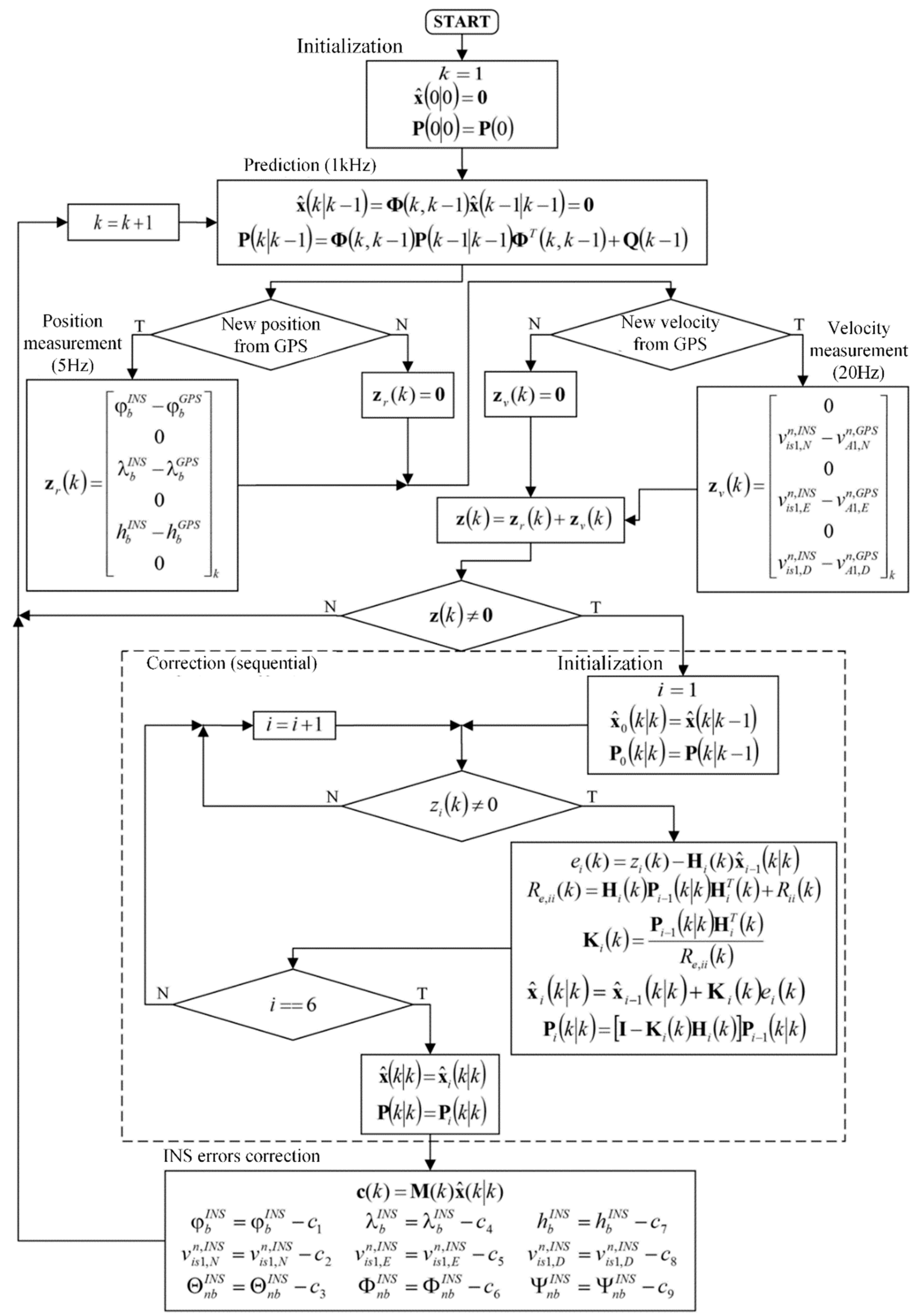
An algorithm of sequential Kalman filter used in the proposed system consisted of four stages: initialization, state prediction, measurement update, and reference system (INS) correction (
Figure 2). In the initialization phase, the initial values of the system state vector elements were assumed to be zeroes, since the INS was initialized using the GPS data with zero-mean errors. Moreover, the initial value of the covariance matrix
was determined using the formula [
12,
13]:
where the elements
are the GPS position errors variances expressed in
units converted from
,
are the GPS velocity errors variances, and
represent the initial variances of INS orientation errors, which could be determined using the IMU documentation or a dedicated experiment.
The state prediction phase was executed at the INS update rate (1 kHz). In the presented filter working in the INS/GPS system with a feed-backward correction, the errors of the reference system were reset after each measurement update; therefore, in the prediction phase, the a priori state vector
elements had zero values [
11].
The measurement update (correction) phase was triggered by either the GPS position or the GPS velocity data. In the case of acquiring only GPS position information (which occurred with the frequency of 5 Hz), the measurement vector had non-zero elements in the positions . In the case of acquiring GPS velocity data, the vector had non-zero elements in the positions , whereas after acquiring both position and velocity data, all the elements of this vector were non-zeroes.
In the sequential Kalman filter, the measurement update equations are represented in a scalar form, contrary to a matrix form in the classic Kalman filter. As a result, the calculations were performed independently and successively for each acquired element of the measurement vector. The measurement update began with an initialization using prediction results:
,
. Then, elements of the residual vector
, diagonal elements of the innovation covariance matrix
, and columns of Kalman gains matrix
were determined in a loop [
11]. Based on them, the estimate of the state vector
and the covariance matrix
were calculated after each
i-th inner loop iteration [
9]. After processing all the non-zero elements of the measurement vector, the correction phase ended, and the results obtained in the inner loop were assigned to the final measurement update results:
and
.
The last phase of the navigation data processing was the INS errors correction using a feedback loop. The vector of corrections
was calculated using the following equation:
where
is a matrix, which ensures appropriate translation from the
n-frame to the
e-frame:
The vector of corrections was subtracted from the current values of the navigation elements determined by the INS, and therefore the system errors were bounded, and the Kalman filter estimated only the residual errors (i.e., what remained after the previous correction).
4. Filter Tuning
The presented model of INS/GPS navigation system is based on an idealized and simplified description of errors occurring in the real system. Both the simplifications and the incomplete knowledge of the system make the developed Kalman filter algorithm not optimal. In such cases, the filter tuning procedure is commonly used, which involves modifying the model parameters in order to minimize the state vector estimation errors.
During this procedure, the values of
and
matrices were modified in order to obtain the conformity of the statistical parameters of the residual vector
, which was a realization of a stochastic process of innovations and the theoretical parameters in the innovations process [
19]. In the optimal Kalman filter, the innovations vector has a normal distribution with a zero mean [
19]. The diagonal elements of the
matrix represent the variances of the process components. According to the normal distribution properties, 95.5% of samples for each component of the residual vector
should lie within a range defined by ±2 standard deviations of the innovations process
.
In case of the
matrix, the tuning procedure was applied to the power spectral densities of the IMU accelerometers and gyroscopes noises given in Equation (43). Common scaling coefficients
,
,
were used for accelerometers and gyroscopes for each axis. In the case of the
matrix, the scaled parameters were the variances of the GPS position and the velocity errors given in Equation (51). One common coefficient
was used for all the position errors, and one coefficient
was used for the velocity errors. Firstly, and
were determined, as they were connected with the GPS system performance, which could be assumed to be repeatable in similar testing conditions. Then, further tuning was performed using
matrix coefficients. The values of the coefficients established in the tuning procedure are presented in
Table 1.
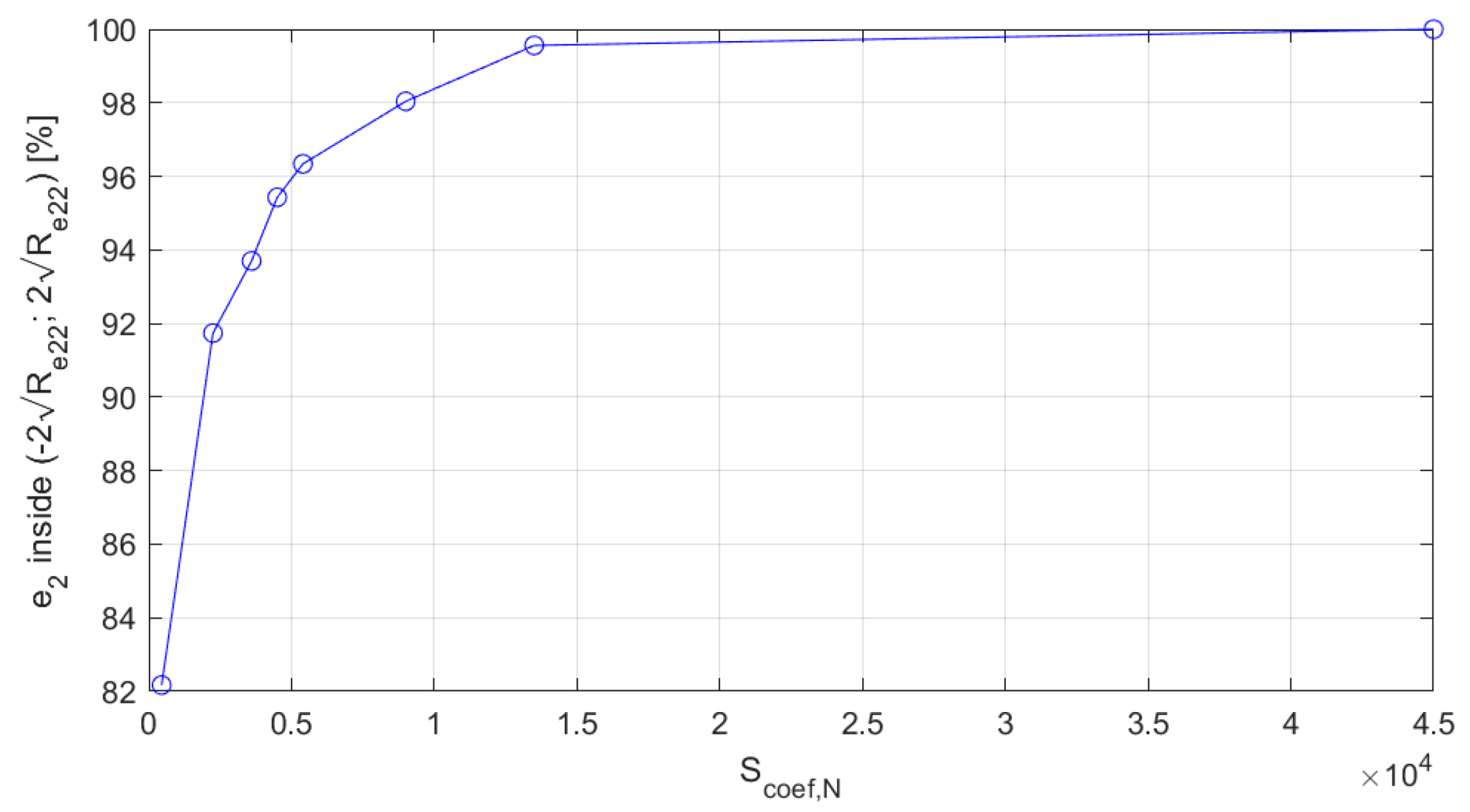
Table 2 shows the influence of the scaling coefficients on the
vector statistical parameters. The highlighted rows represent the results obtained with the use of the coefficients from
Table 1. In this experiment, the influence of each coefficient was tested separately. Moreover, to give a better insight into the effects caused by changes of these coefficients in a wider ranges,
Table 2 contains a more detailed analysis of the system sensitivity to the
, which is also presented in
Figure 3 for a chosen element of the
vector, namely,
. The results presented in this figure show that the number of
samples lying within the
range increased monotonically with the increase of the
coefficient, asymptotically tending to 100%. Similar behavior was also observed for other coefficients and the residual vector elements.
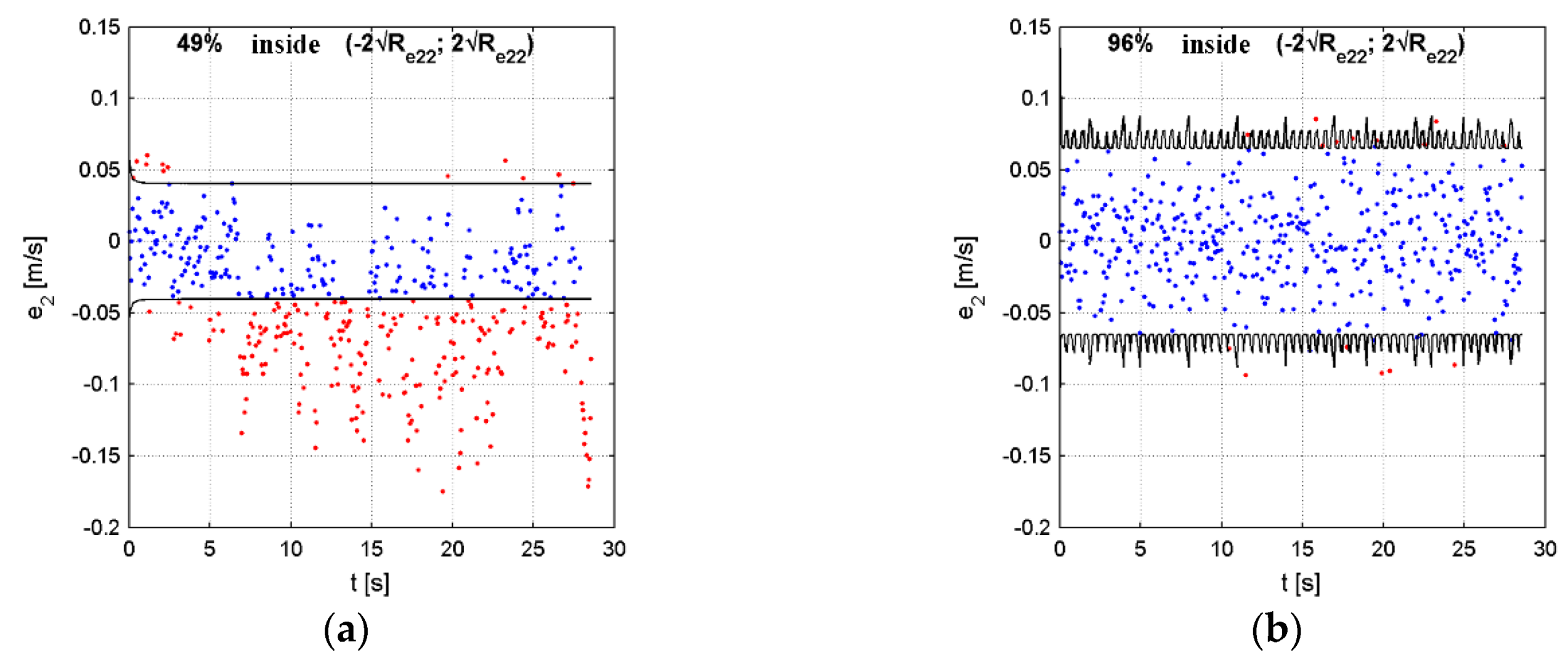
Choosing appropriate values of the scaling coefficients is an experimental process, and sometimes achieving the target of 95.5% samples within the ± 2 standard deviations range for each component of the
e vector is impossible due to the limited number of scaling coefficients. However, the proposed set of coefficients was enough to ensure that all the residual vector values approximately had the desired statistical parameters, which is visible in
Table 1. A representative analysis of the
component sensitivity to the
Scoef,N showed that ±20% deviations of the
from its initially set value (
Table 1) had minor influence on the
statistics (the total count of samples outside the ± 2 standard deviations range changed from 93.7% to 96.3%, which was close to the desired value of 95.5%). This relatively small sensitivity is useful in real-world conditions, because changes of the IMU parameters (over time or between different units) should not have a significantly adverse effect on the system’s performance.
As shown in
Figure 4, where
component is once again presented as an example, initially, the statistical condition was not met; however, after the tuning procedure, the desired statistical parameters were obtained.
6. Results of MOCO Testing
The influence of the navigation corrections obtained from the proposed INS/GPS system on SAR terrain images was determined using the WATSAR aerial system equipped with a
Ku band (15.9 GHz) synthetic aperture radar [
20]. The imaged area is shown in
Figure 7, an image obtained without the use of navigation correction is presented in
Figure 8, the image shown in
Figure 9 was obtained using corrections originating from the INS system, while
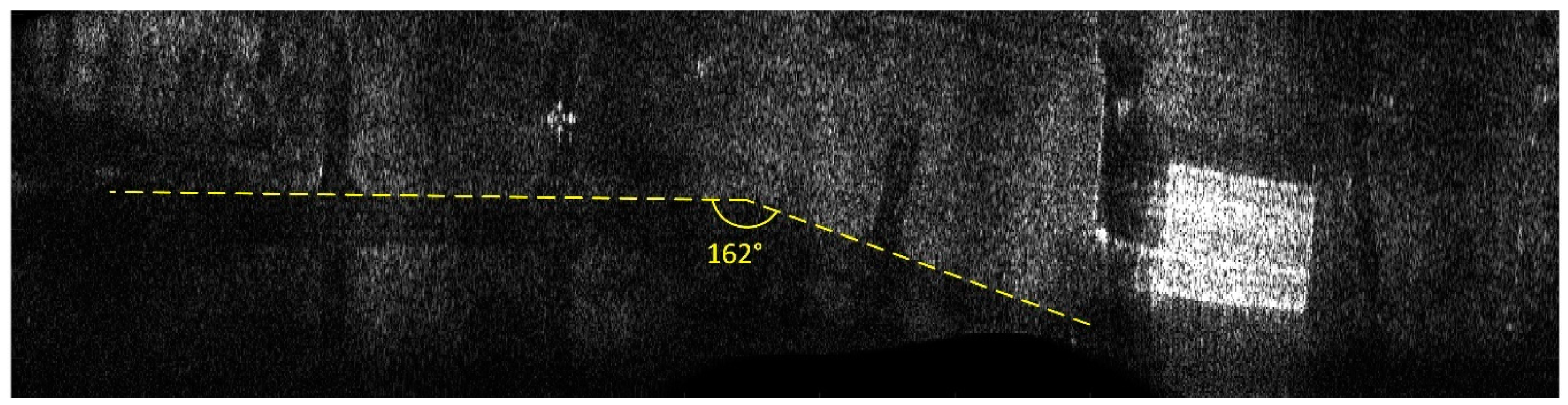
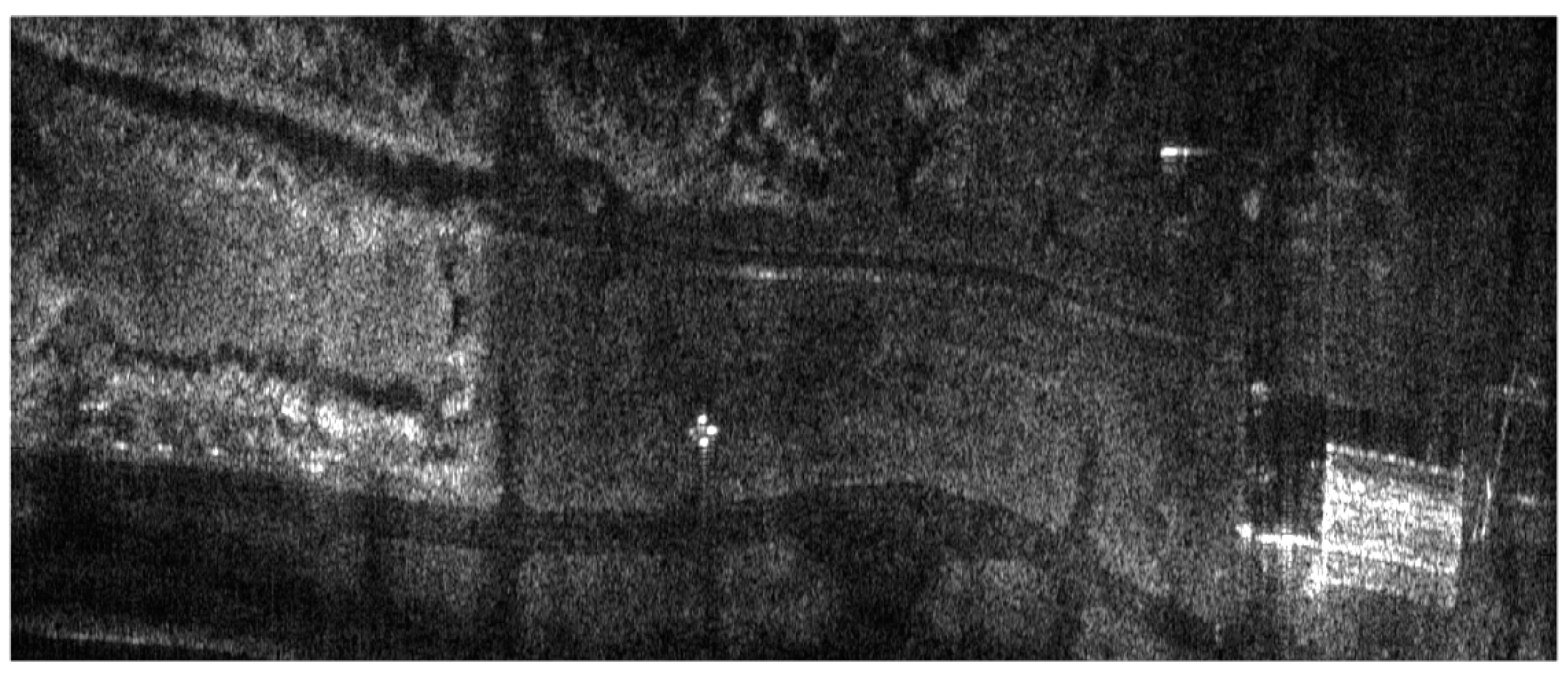
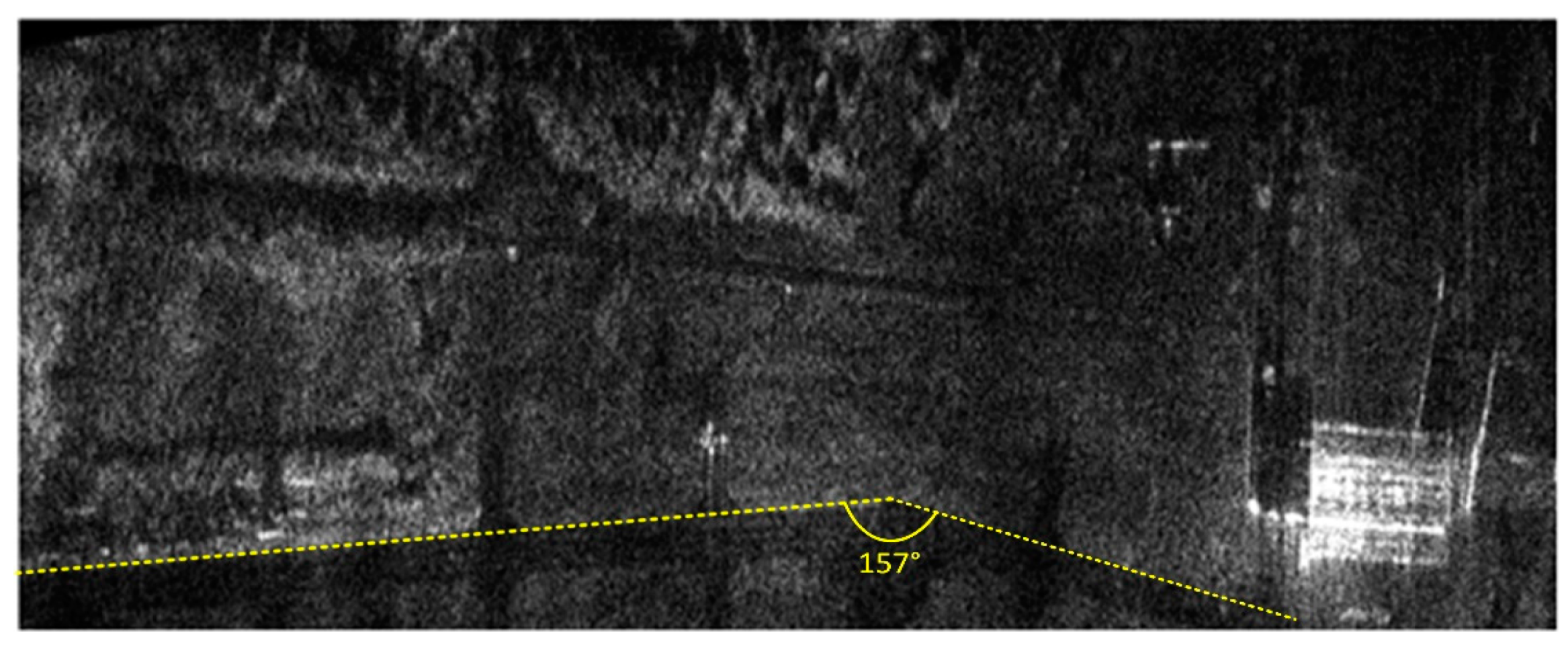
Figure 10 contains an image calculated using the INS/GPS system data. During the imaging, an aperture length of 501 elements and a rectangular window were used.
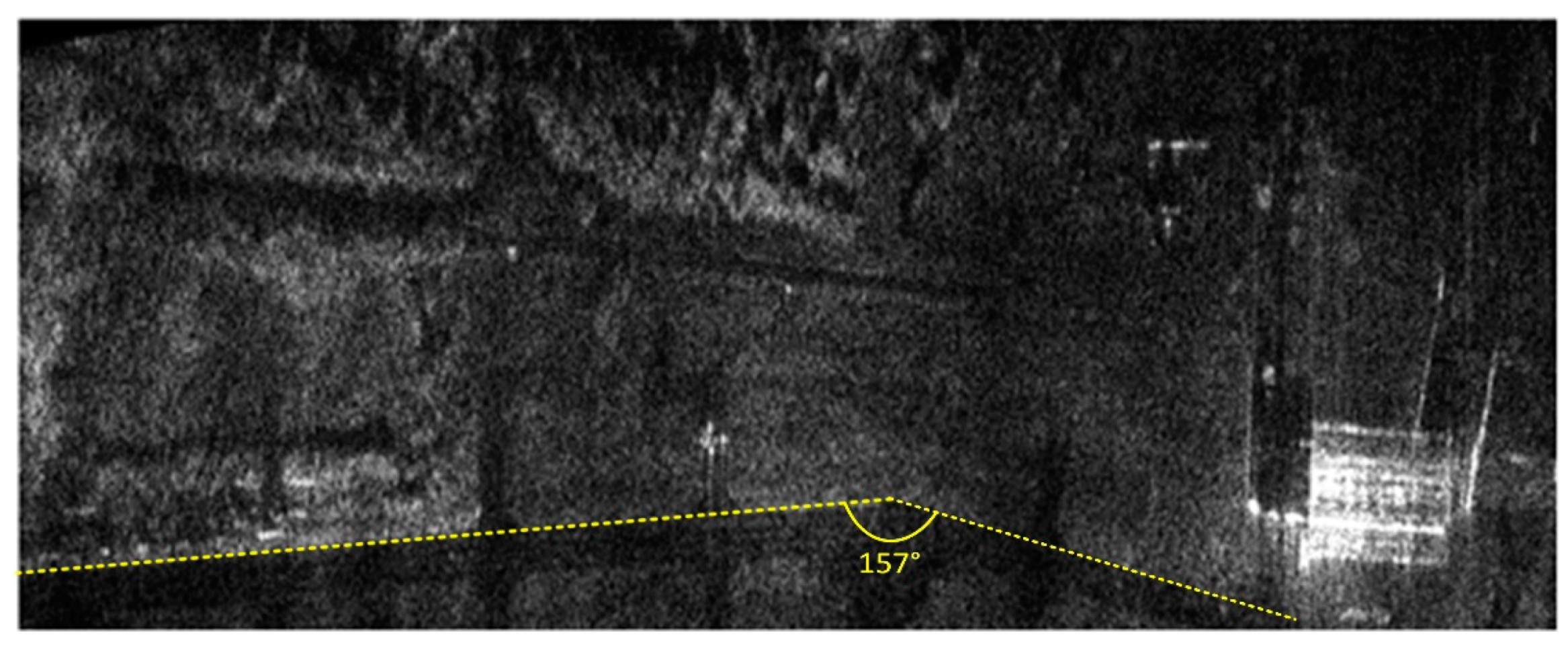
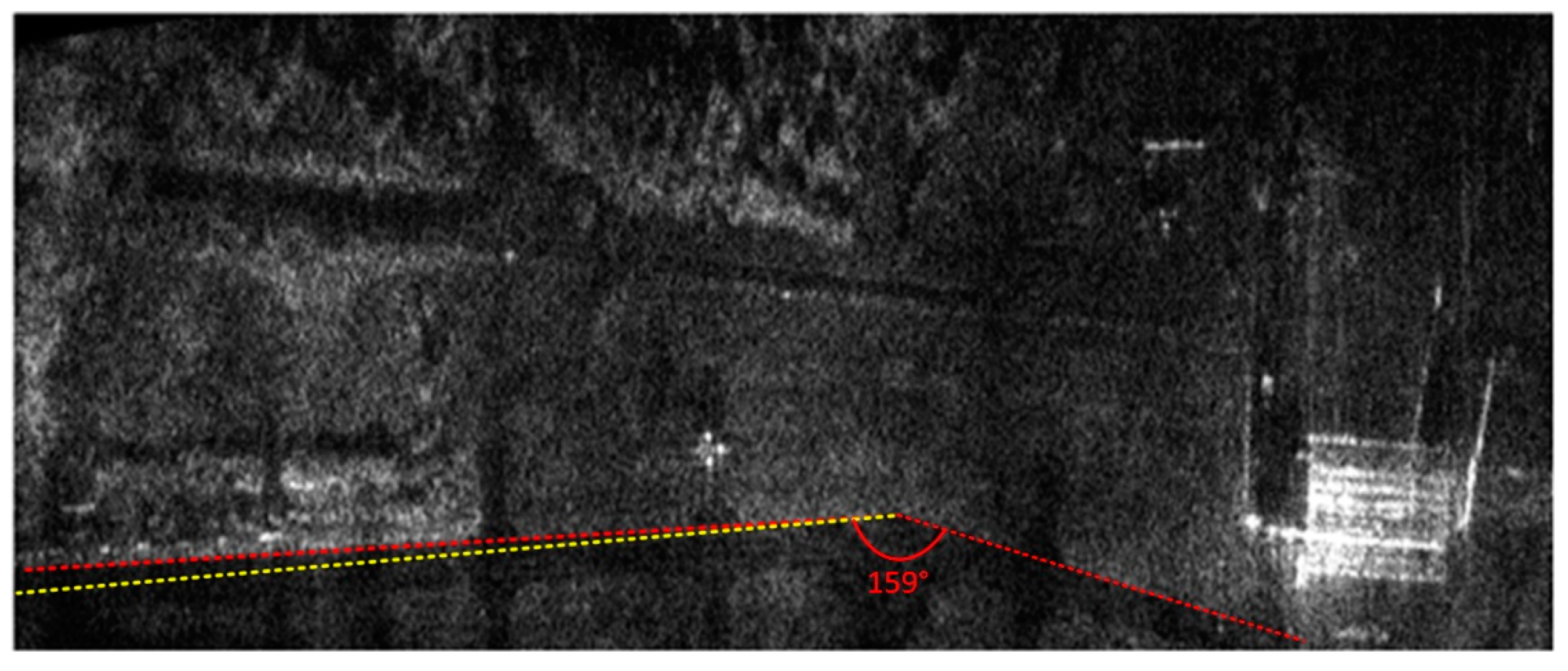
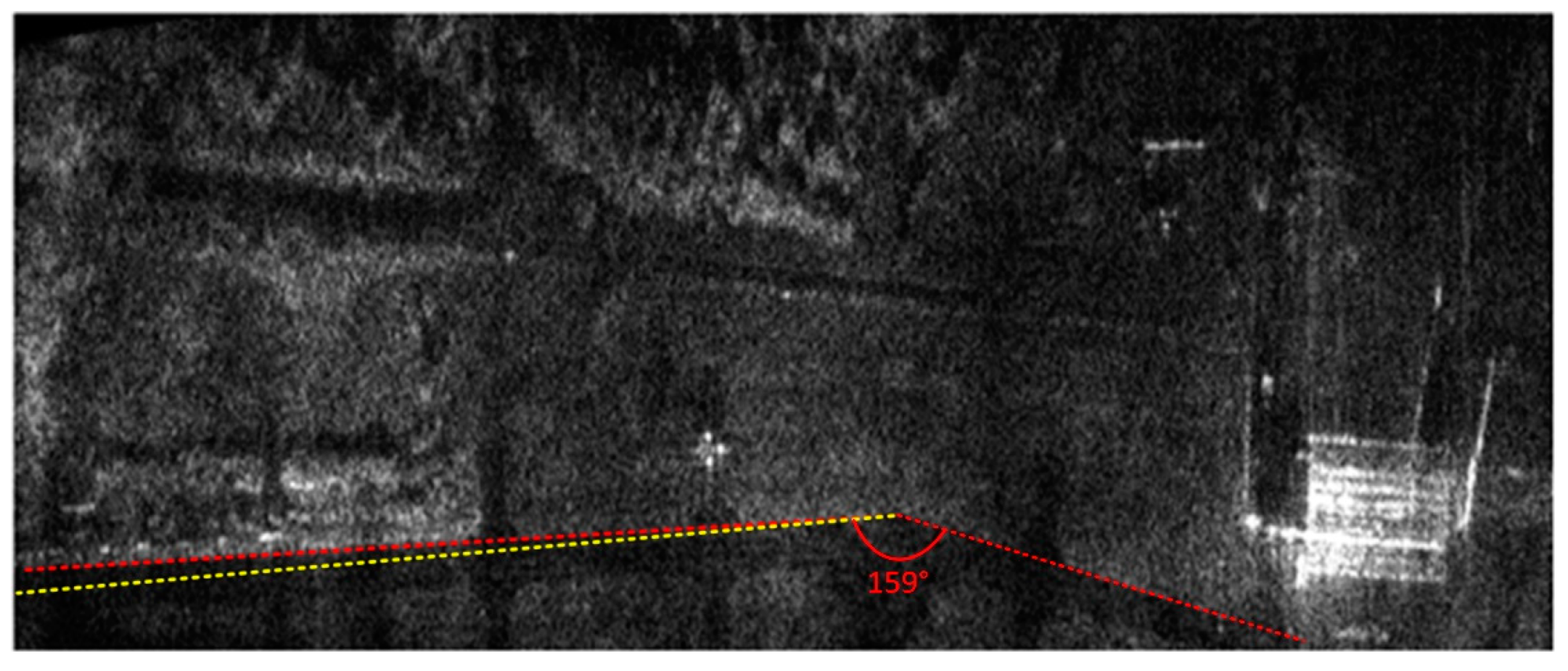
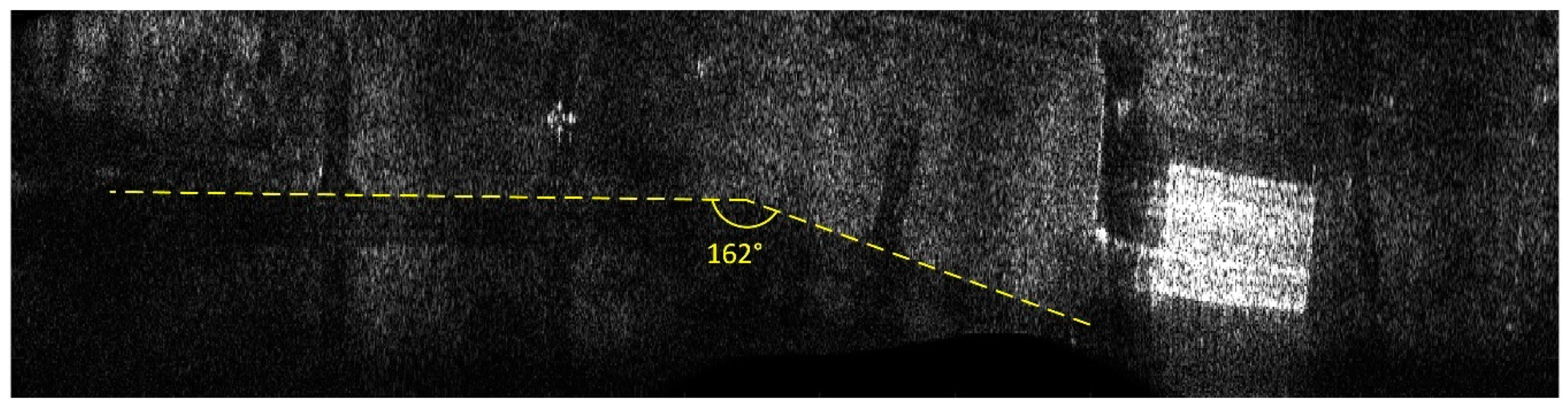
Both the INS/GPS and the INS corrections enabled a significant reduction of the image geometric distortions in relation to the image obtained without MOCO. Between these images, however, there were significant differences in the efficiency of this reduction, which is clearly visible in the southwest part of the airfield taxiway (left, bottom part of
Figure 7,
Figure 8,
Figure 9 and
Figure 10). In
Figure 9 (with INS corrections), the north edge of the taxiway is indicated by a yellow dotted line. This edge deviates in the southern direction in relation to the analogous edge determined in the INS/GPS image (
Figure 10), which is marked as a red line. For comparison purposes, the yellow line from
Figure 9 was translated the
Figure 10. In the INS corrected image, the erroneous deviation of the taxiway is visible in the final part of the measurement session (the flight was carried from the east to the west) and was related to a growing discrepancy between the INS and the real trajectory due to increasing INS errors. To evaluate the system’s ability to reduce the geometric distortions, the angle between the two parts of the taxiway was compared to the true one, which equals 159°. The reference angle was measured using an aerial image and image processing software, where three points located on the north edge of the taxiway were determined in order to produce two intersected lines. In the case of the INS-based image, this angle equaled 157°, whereas in the image obtained using INS/GPS system, the angle matched the true one and was 159°. This leads to the conclusion that the INS-based MOCO can be used only for time-limited measurement sessions. On the contrary, the INS/GPS MOCO procedure provides a better reduction of geometric distortions and can be used without these time limitations, thus it could be an attractive solution for SAR imaging MOCO.
It should be noted that geometric distortions of images can be even better assessed using Ground Control Points (GCPs), which must be visible in the radar terrain image and in the reference image (often prepared in the visual spectrum range) [
24,
25,
26]. In this method, the distortions can be expressed as a standard deviation of the radar image GCPs coordinates in relation to the reference image. The obvious limitation of this method is the need for a reference image and the set of GCPs with precisely determined coordinates. In the experiments presented in this paper, there were no GCPs, thus usage of this method was not possible. However, in the future tests, the GCPs are planned to be deployed in the test area to improve the system’s evaluation.
Besides geometric distortions, in our research, we assessed the influence of various MOCO procedures on the quality of SAR images using techniques typically used in image quality assessment [
4,
5,
8,
27,
28]. Contrast, entropy, and various parameters describing image spatial resolution were calculated for the images presented in
Figure 8,
Figure 9 and
Figure 10.
Due to the use of INS/GPS based MOCO, the test image had a better (higher) contrast (IC) than the image obtained without the correction (IC = 7.56 compared to 4.06). On the other hand, this result was worse (lower) than the image contrast obtained with the use of INS-based MOCO (IC = 8.32) [
5,
8]. A similar effect related to the image entropy (E). The lower the entropy was, the better the image was focused [
8]. Due to the use of INS/GPS corrections, the entropy of the test image dropped from 14.43 (the image without MOCO) to 13.94. Again, this result was slightly worse than the entropy of the image obtained with the use of INS-based MOCO (E=13.83).
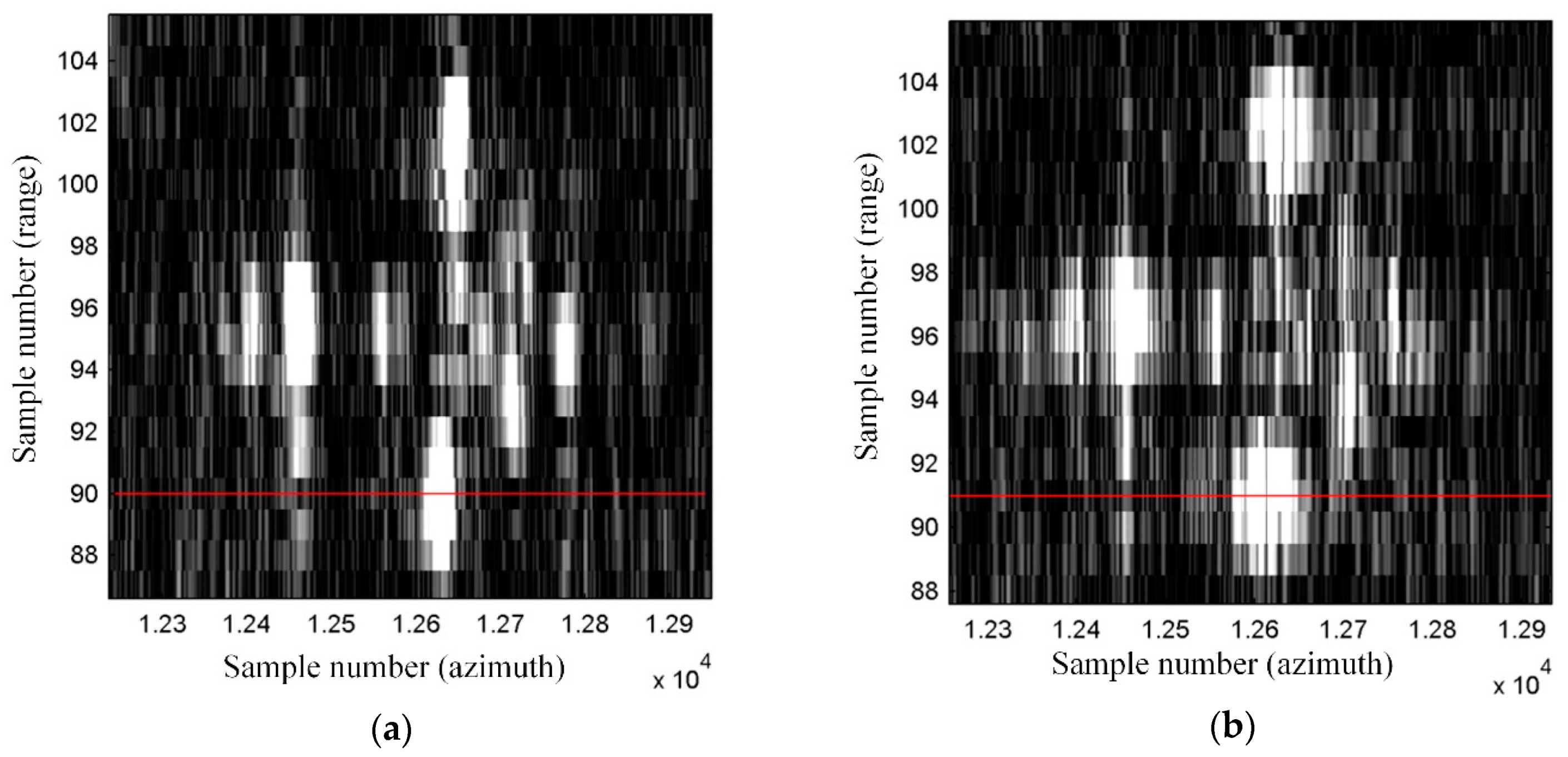
To determine the spatial resolution (SR) [
4], the peak sidelobe ratio (PSLR), and the integrated sidelobe ratio (ISLR) [
27,
28], a horizontal line from a bottom part of the image was chosen. This line passed through one of the corner reflectors, which were formed in an arrow-shape and were placed on the apron during testing of our SAR system. An enlarged image of that arrow is shown in
Figure 11. The image obtained with the use of the INS/GPS-based corrections (right side) was more blurred, and the objects forming the arrow were harder to distinguish compared to the INS-based MOCO image (left side).
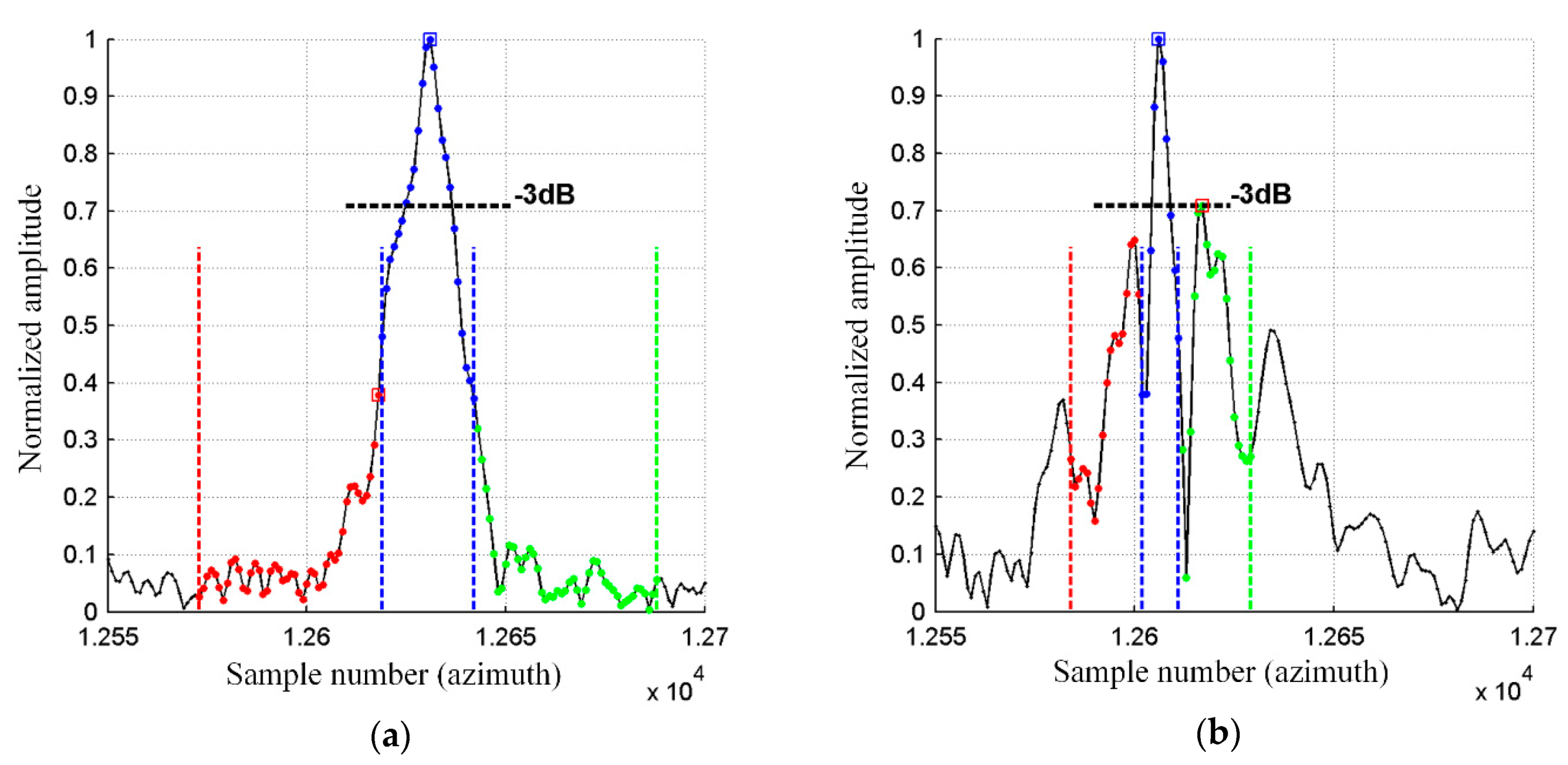
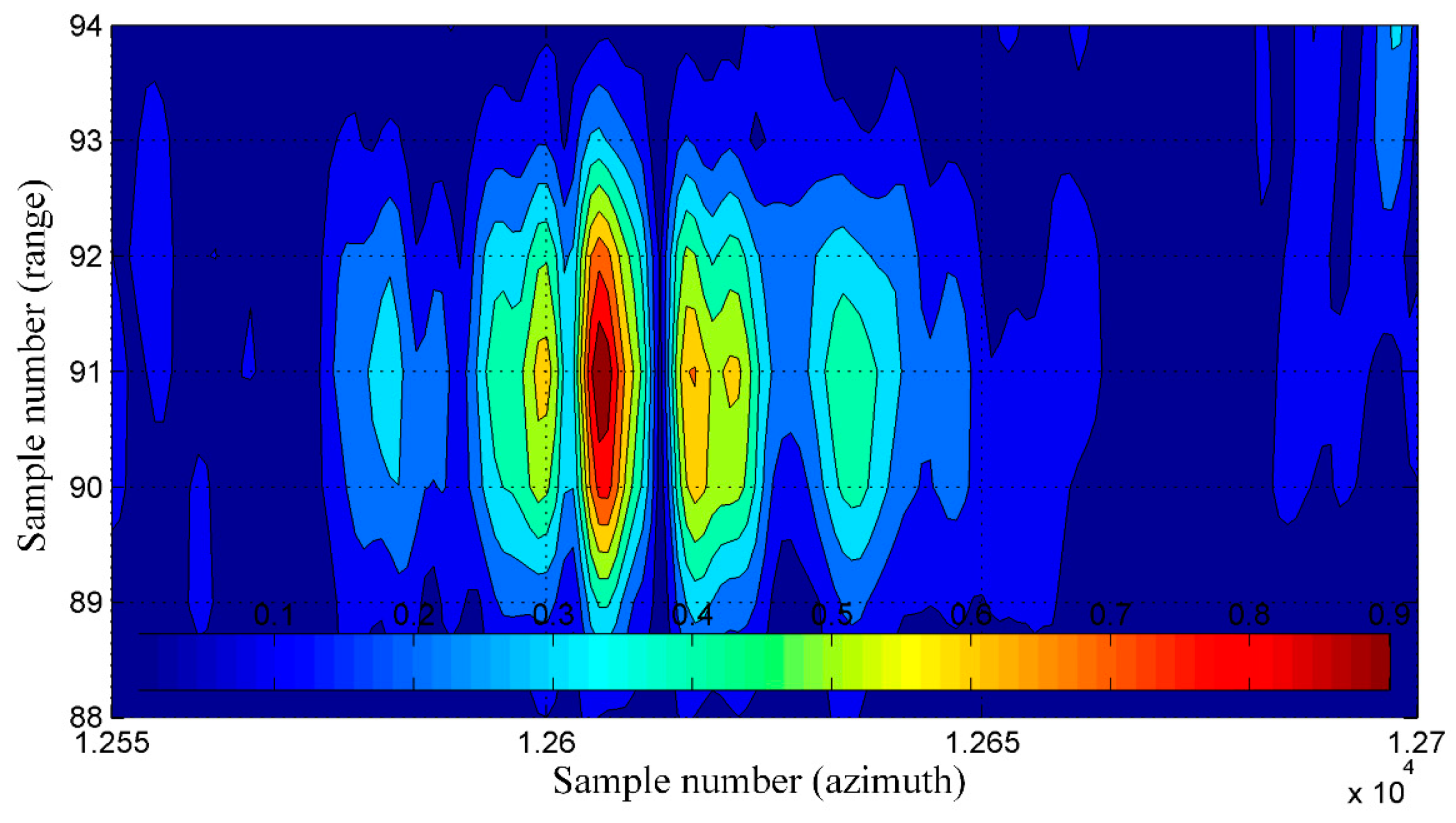
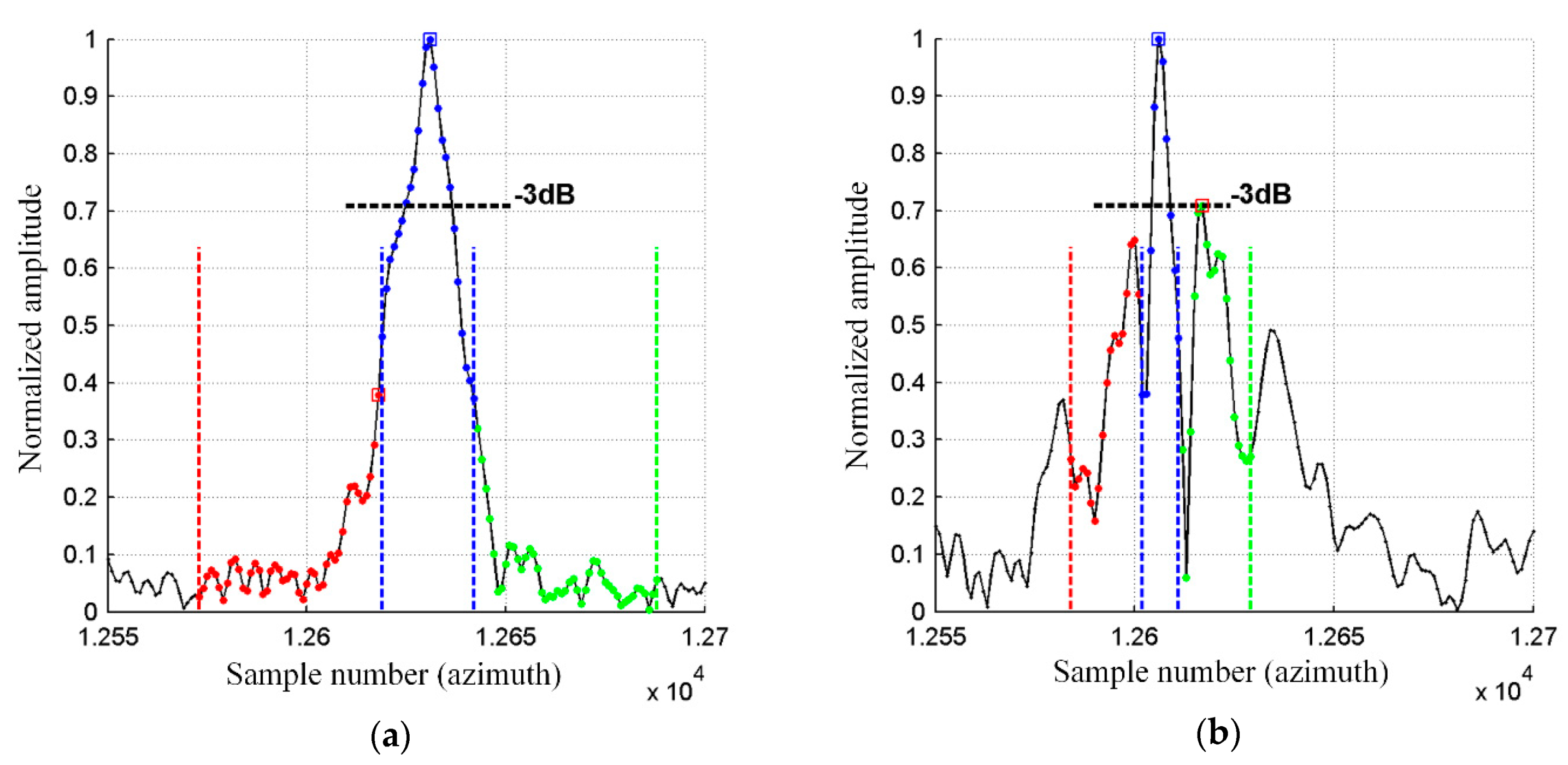
A graph of a normalized amplitude of image pixels lying on the mentioned line is shown in
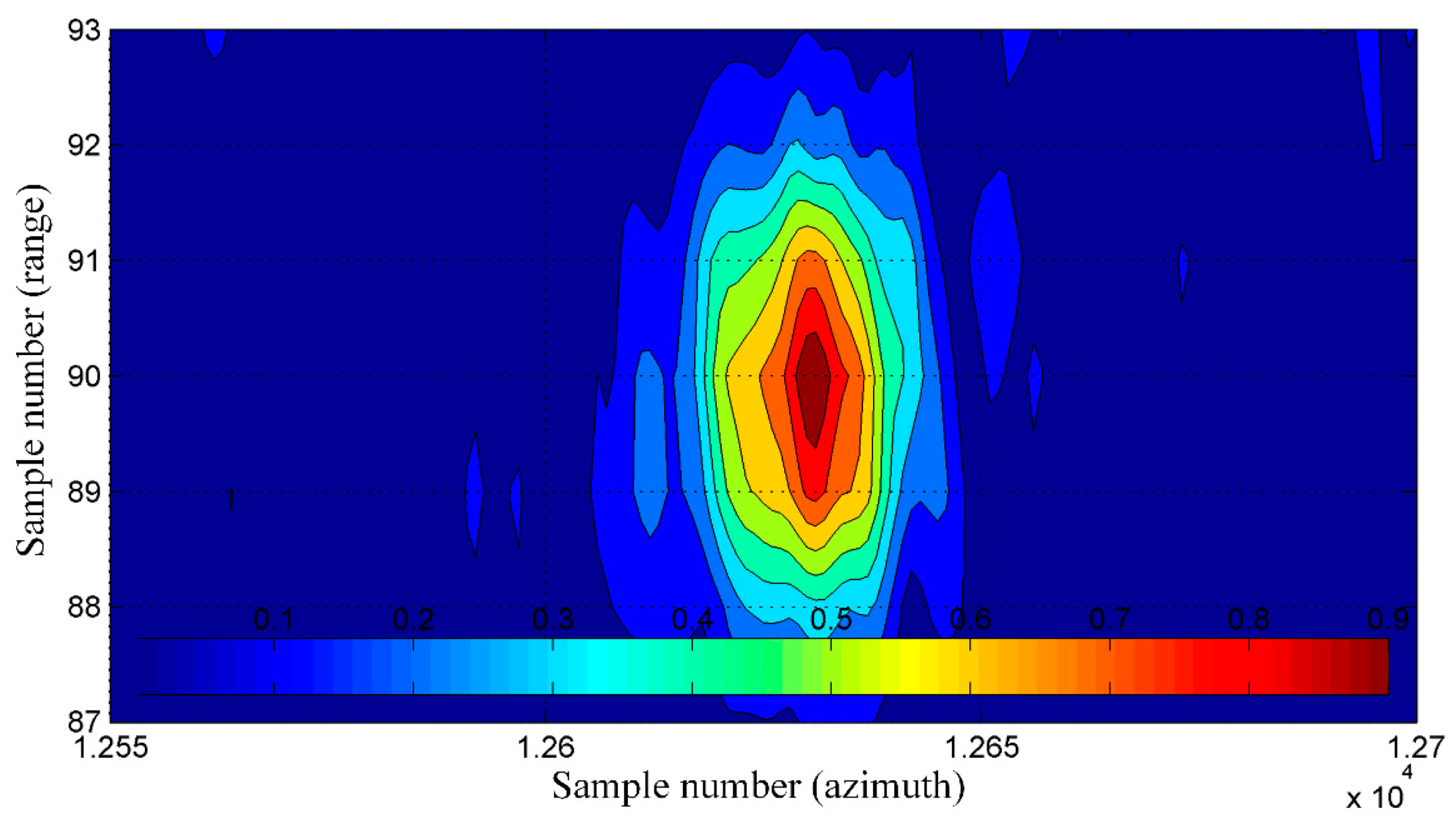
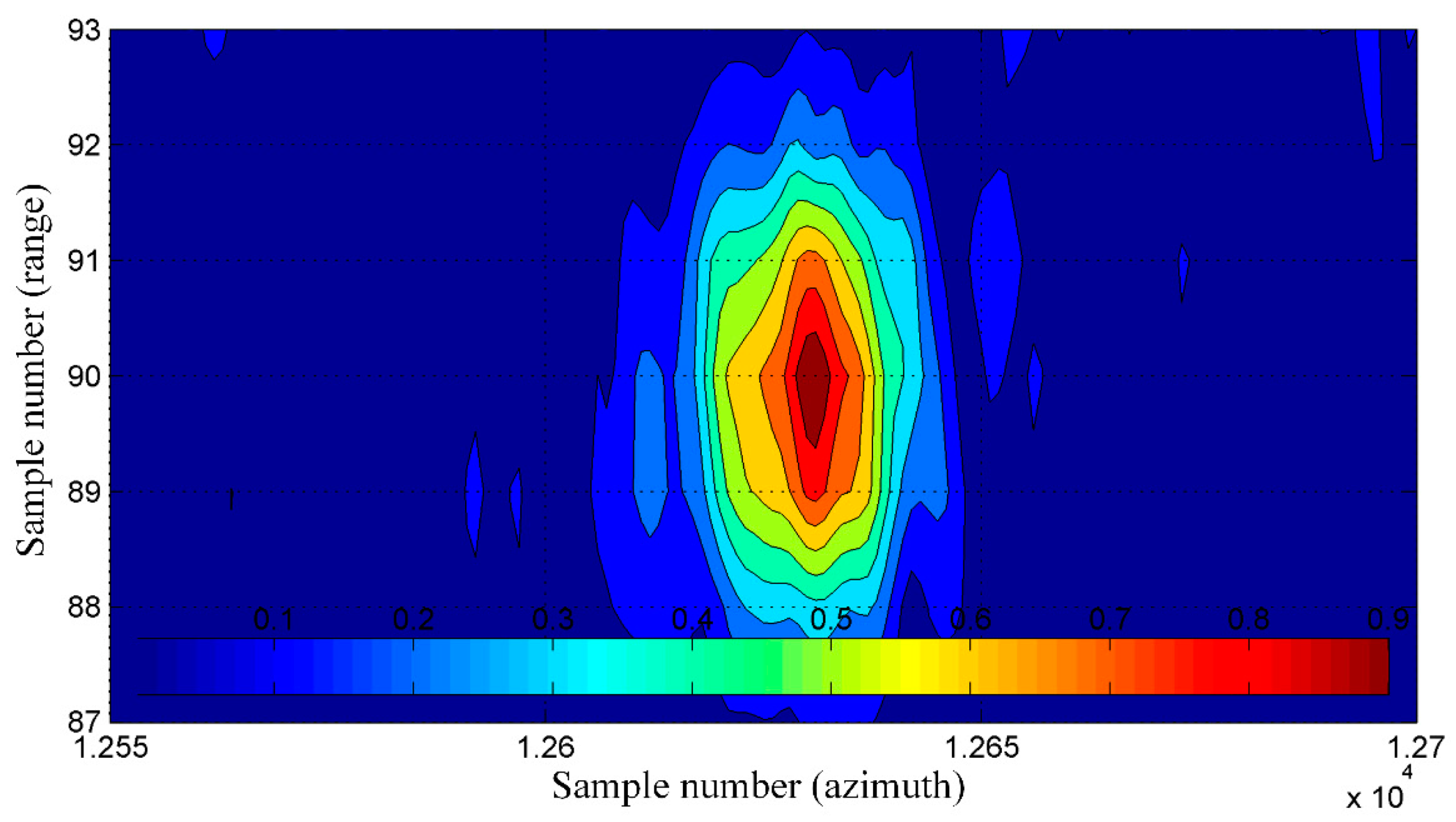
Figure 12. For an even more intuitive visualization, normalized amplitudes of image pixels lying on several lines containing the considered corner reflector are presented in
Figure 13 and
Figure 14 as colored contour plots.
In the case of the INS/GPS-based MOCO image (
Figure 12b and
Figure 14), the main lobe was narrower than in the image obtained using only the INS (
Figure 12a and
Figure 13), which in theory leads to a better spatial resolution (SR = 0.110 m versus SR = 0.304 m). In practice, however, in the INS/GPS image, the main lobe was divided, which led to side lobes with very high amplitudes. These side lobes may have been interpreted as false objects, which would have worsened the resolution, causing the image to be blurred.
In the MOCO using INS/GPS data, the high-level side lobes led to a significant deterioration (which meant the increase of the value) of the PSRL and the ISLR compared not only to the image obtained with the INS corrections (PSLR = −8.45 dB, ISLR = −10.5 dB) but also to the image obtained without the MOCO procedure (PSLR = −5.17 dB, ISLR = −5.85 dB). In the case of the INS/GPS method, the obtained results were: PSLR = −2.99 dB, ISLR = 1.52 dB. A comparison of these and the previously mentioned results is given in
Table 3. The arrows in the brackets following the symbols of respective parameters show the desirable direction of changes of these parameters resulting in a better image quality.
Similar experiments and analyses were conducted for various terrain scans. Results obtained for another flight are presented in
Figure 15 (without MOCO),
Figure 16 (INS-based MOCO), and
Figure 17 (INS/GPS-based MOCO), while
Table 4 contains an assessment of the quality parameters.
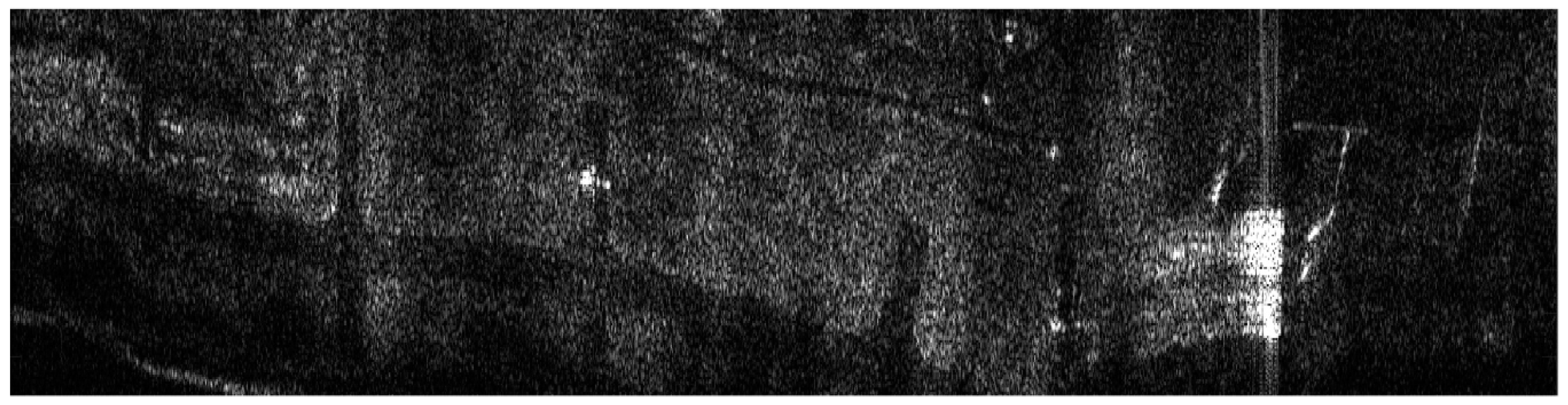
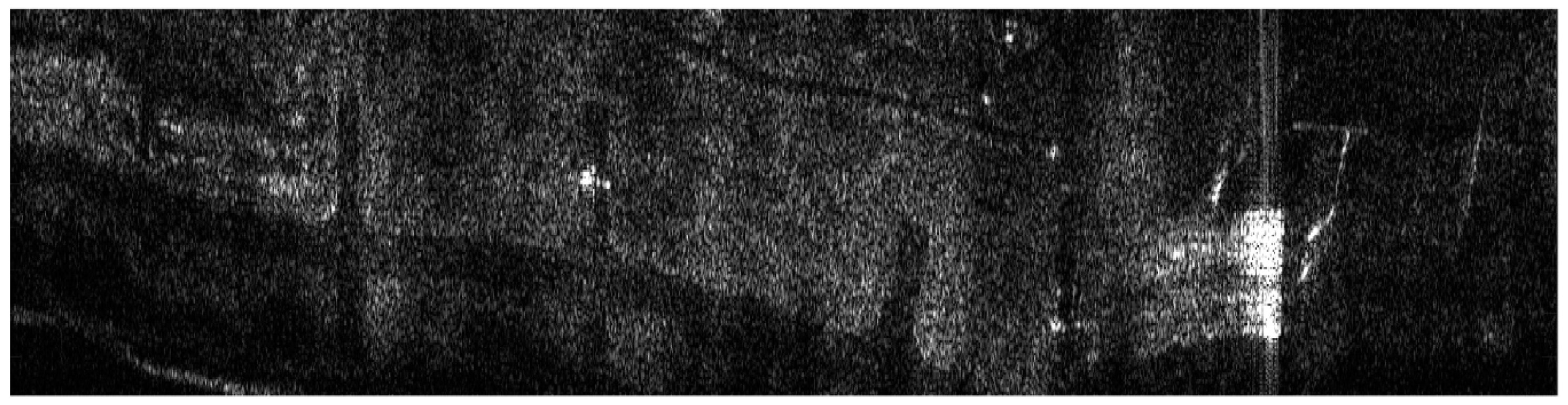
In the case of the image obtained without MOCO (
Figure 15), it was not possible to determine the SR, the PSLR, and the ISLR parameters due to significant image distortions, which hindered distinguishing individual corner reflector. As in the previous example, however, the INS/GPS-based MOCO was more effective in the reduction of the geometric distortions than the INS-based method. In the INS/GPS image, the shape of the taxiway is closer to the true one due to the fact that the north edge of the taxiway in the INS image deviates to the north. Moreover, the shape of the hangar visible on the right (east) side of the INS/GPS image is rectangular, while in the INS image, it is distorted and becomes trapezoidal with a visible nonlinearity of its southern edge.
Considering the superiority of the INS/GPS-based approach in terms of its ability to reduce geometric distortions, it was necessary to investigate the reasons that led to the generally worse performance in terms of the quality parameters presented in
Table 3 and
Table 4.
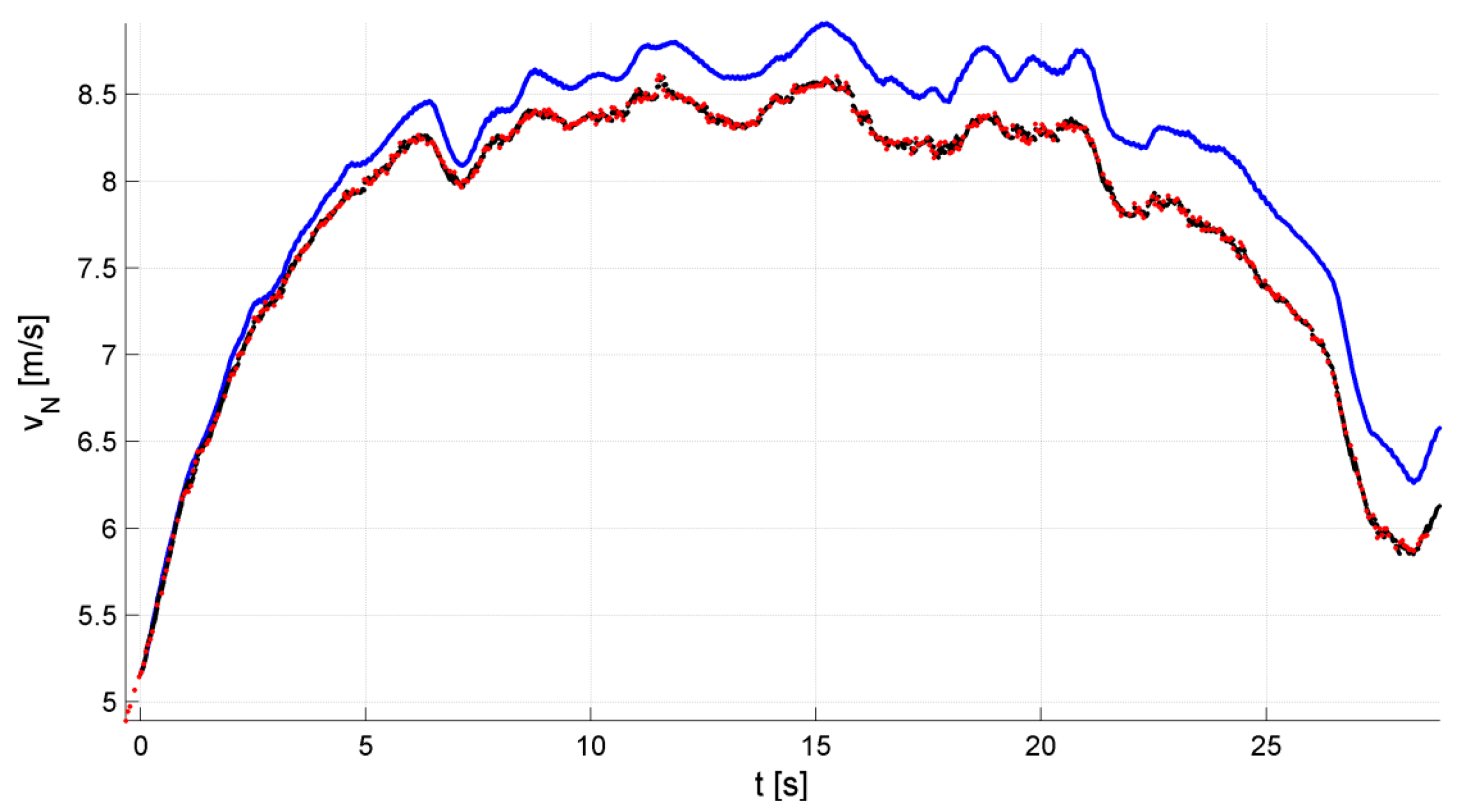
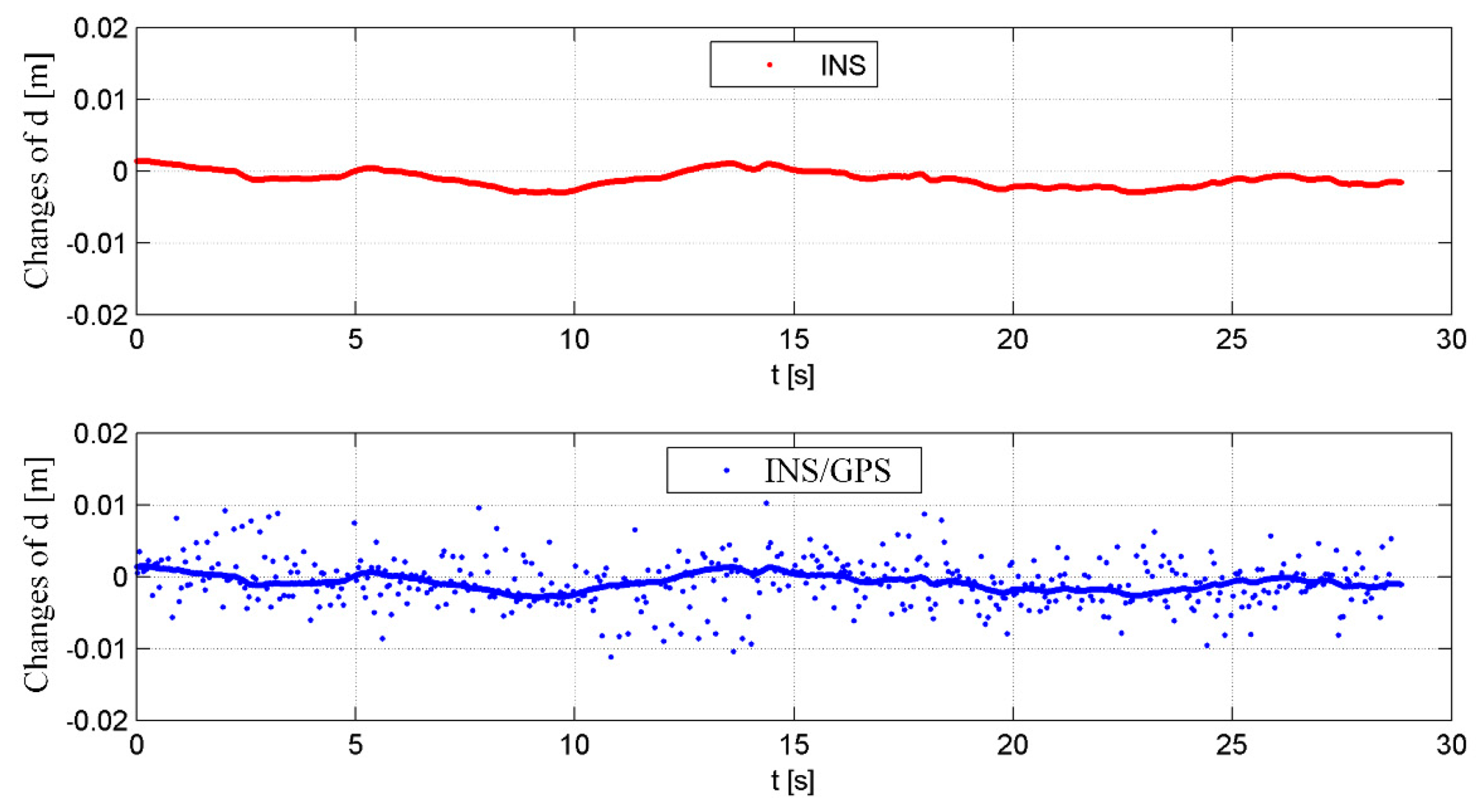
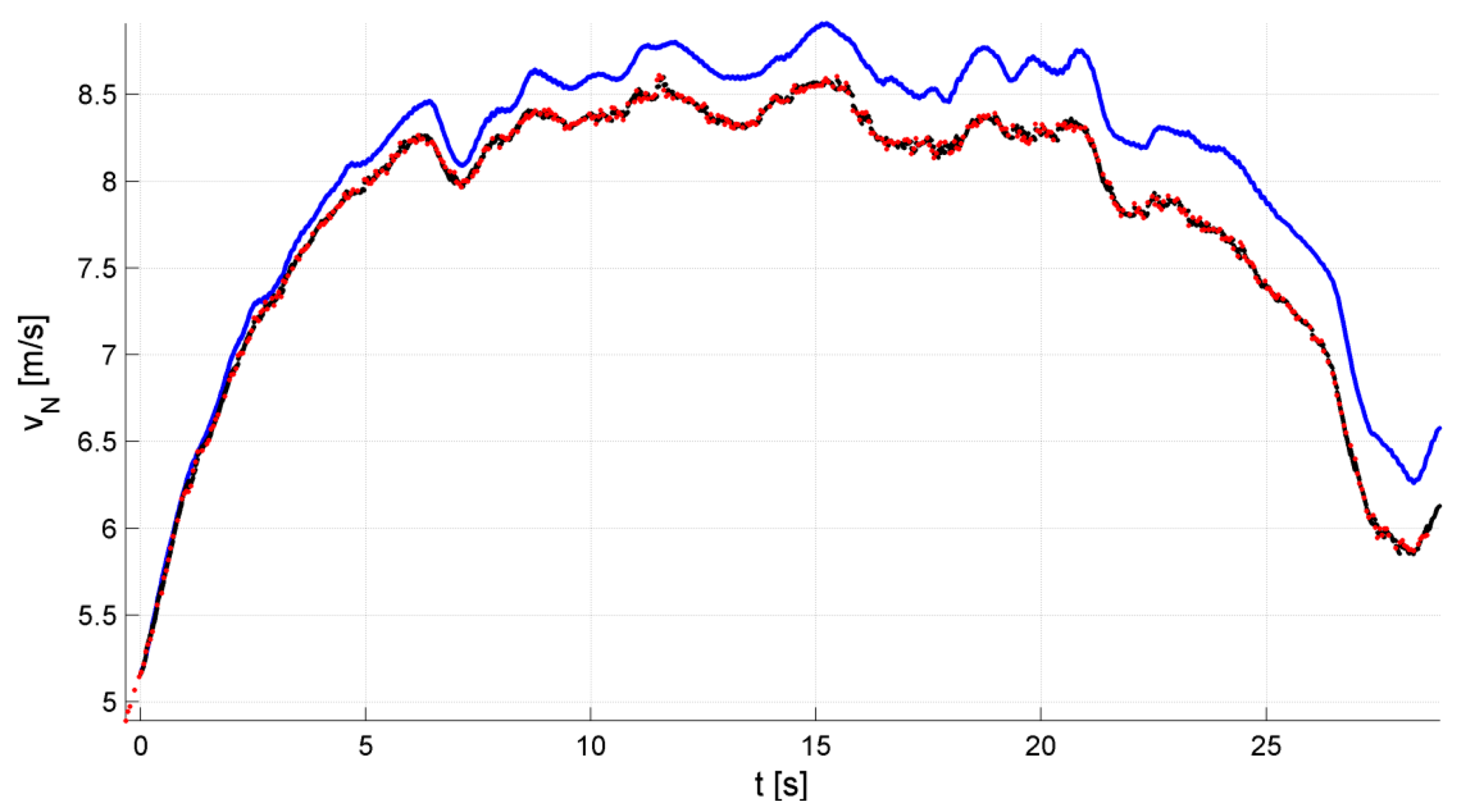
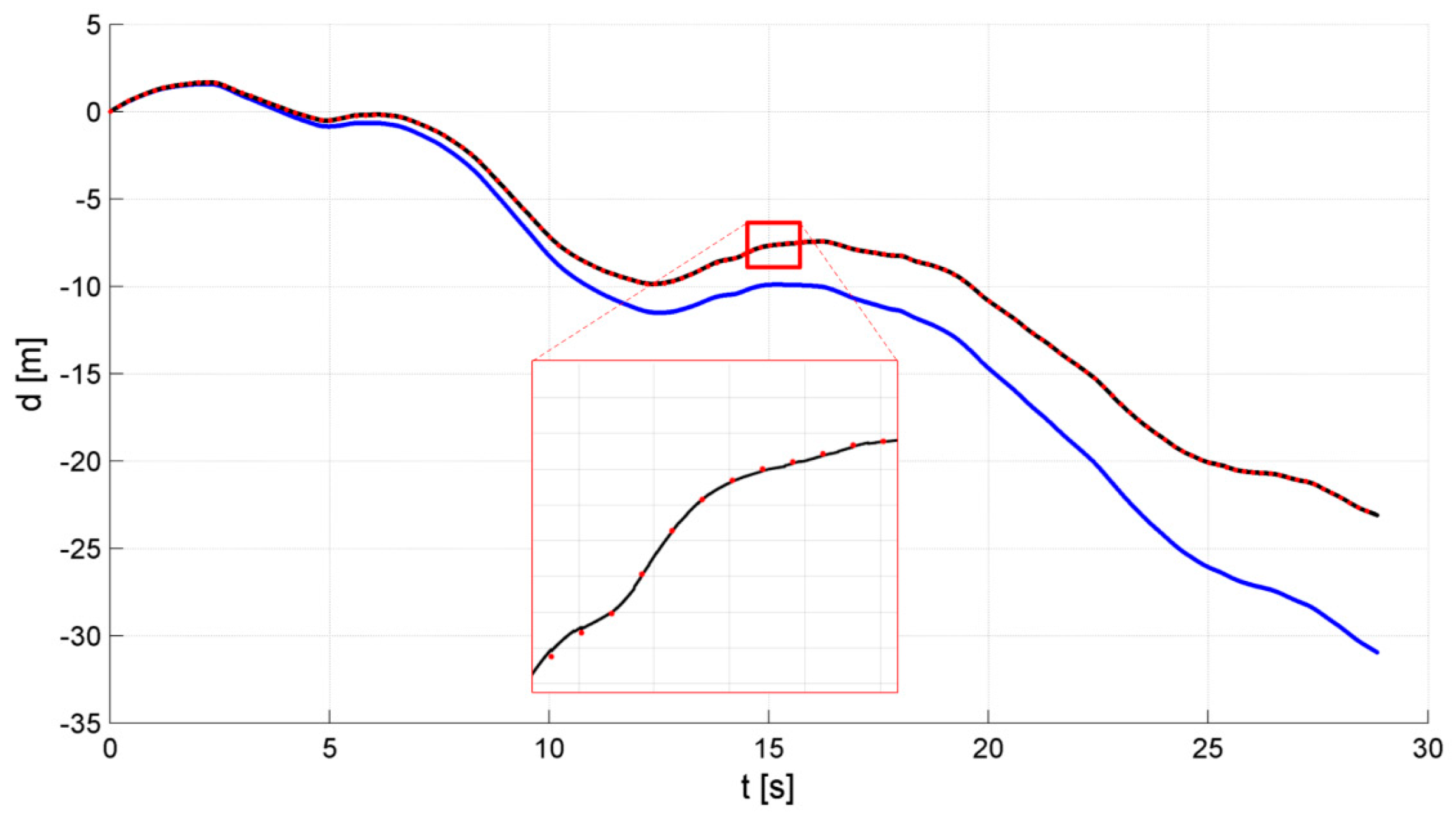
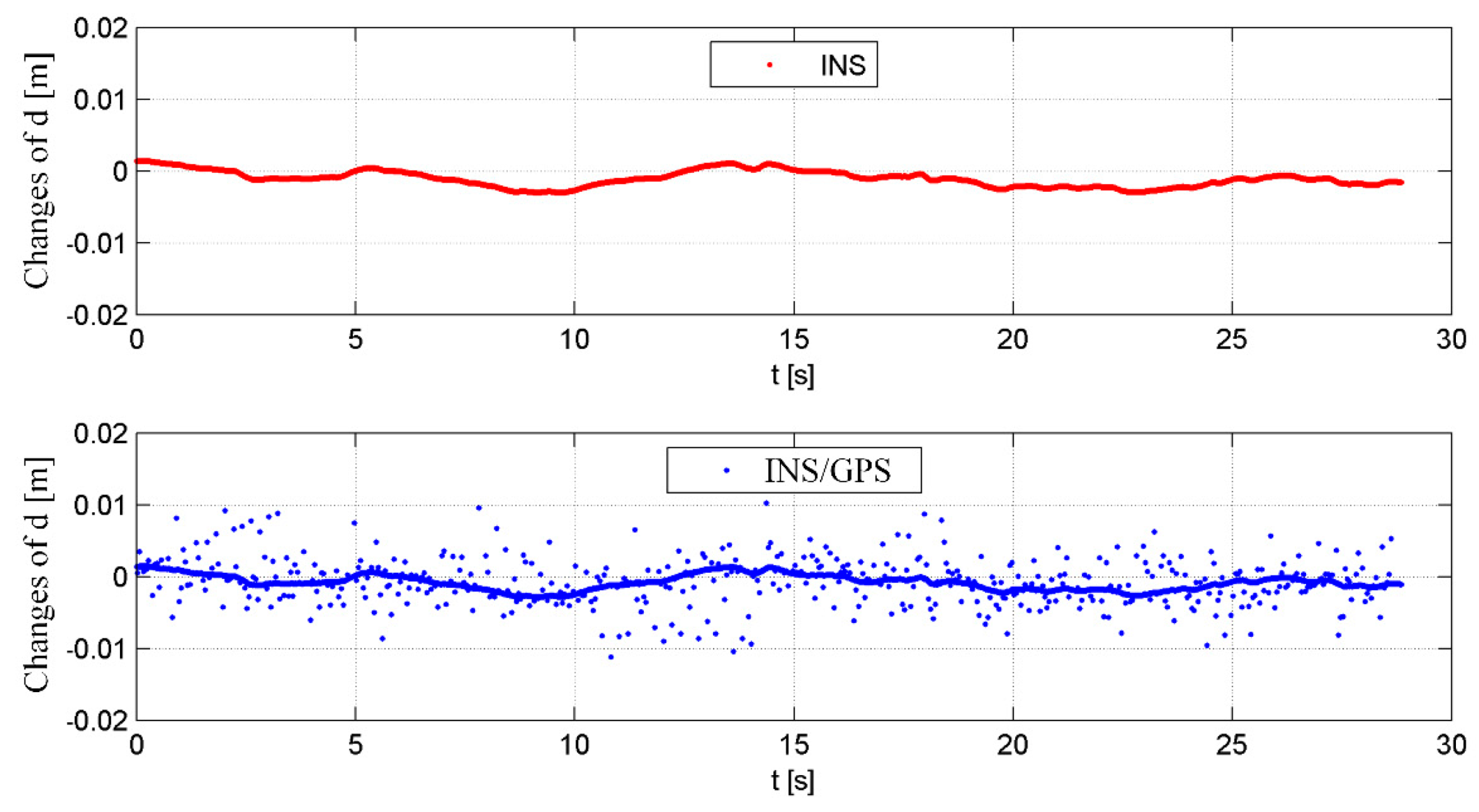
The reasons for these phenomena were random errors associated with the GPS receiver. In the INS, the UAV position and the velocity changes were small in one measurement period (1 ms), while in the GPS-only data, abrupt changes occurred resulting from the GPS errors characteristics. These GPS random errors were subsequently transferred to the INS/GPS integrated solution. As an example, in
Figure 18, the changes of the vertical position component calculated for INS and INS/GPS for one measurement session are presented.
In the case of the INS, the calculated position varied by a maximum of 2.9 mm between two consecutive samples. A similar trend was visible in the INS/GPS data (as a bold line). The points belonging to this line corresponded to the estimation results in which there was no INS error correction by a Kalman filter. The measurement update realized in the Kalman filter with a lower frequency than the calculation of INS solutions led to rapid changes of the estimated navigation parameters, which were visible as the points separated from the main trend line (
Figure 15). These disturbances propagated through the navigation corrections and the MOCO procedure to the SAR image processor, which increased the echo signal sidelobes amplitude (
Figure 12b and
Figure 14). In the final image, this was visible as blurs and false targets [
29,
30].










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}