Early Crack Detection of Reinforced Concrete Structure Using Embedded Sensors





Abstract
1. Introduction
2. Test Specimen and Methods
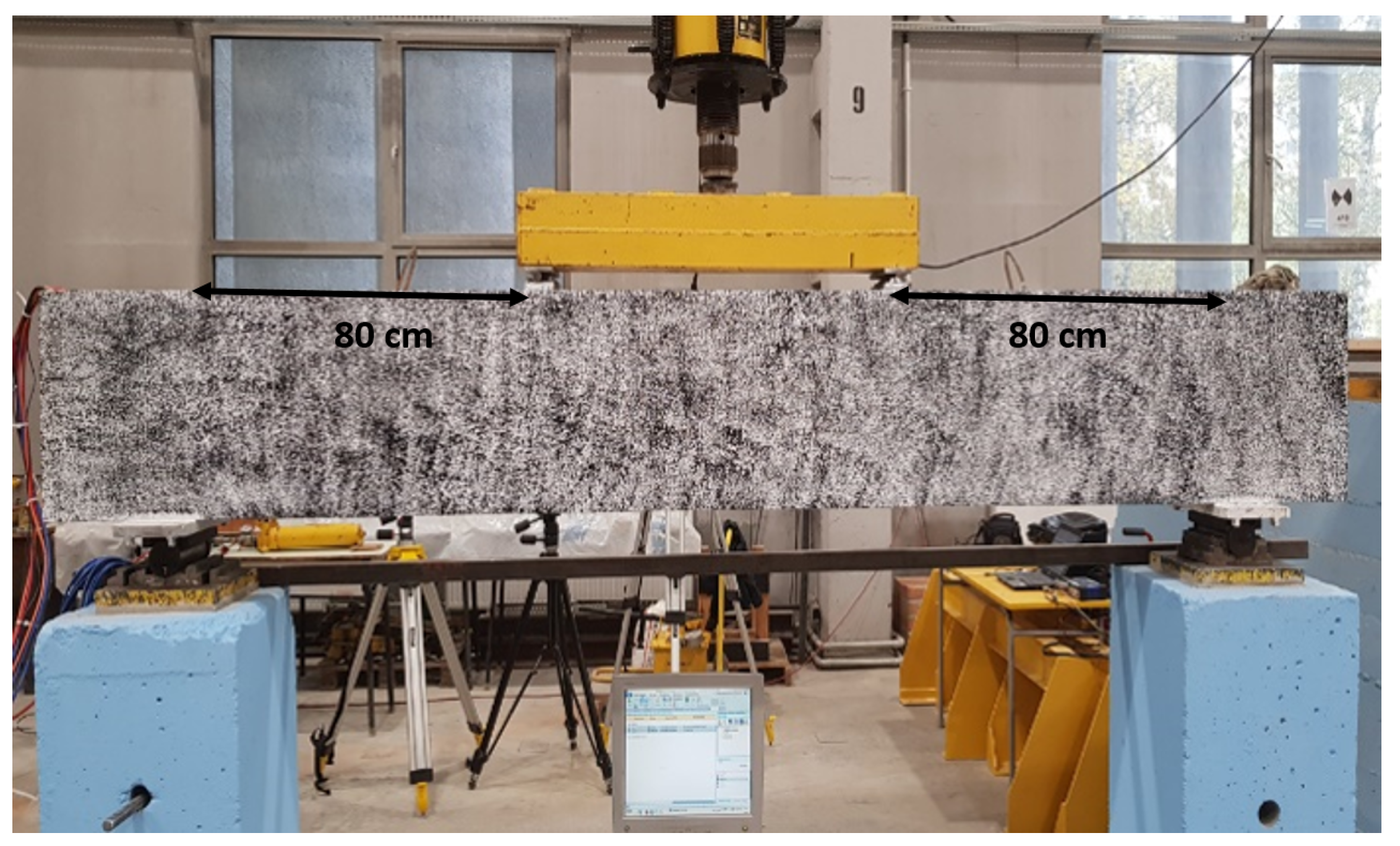
2.1. Test Specimen
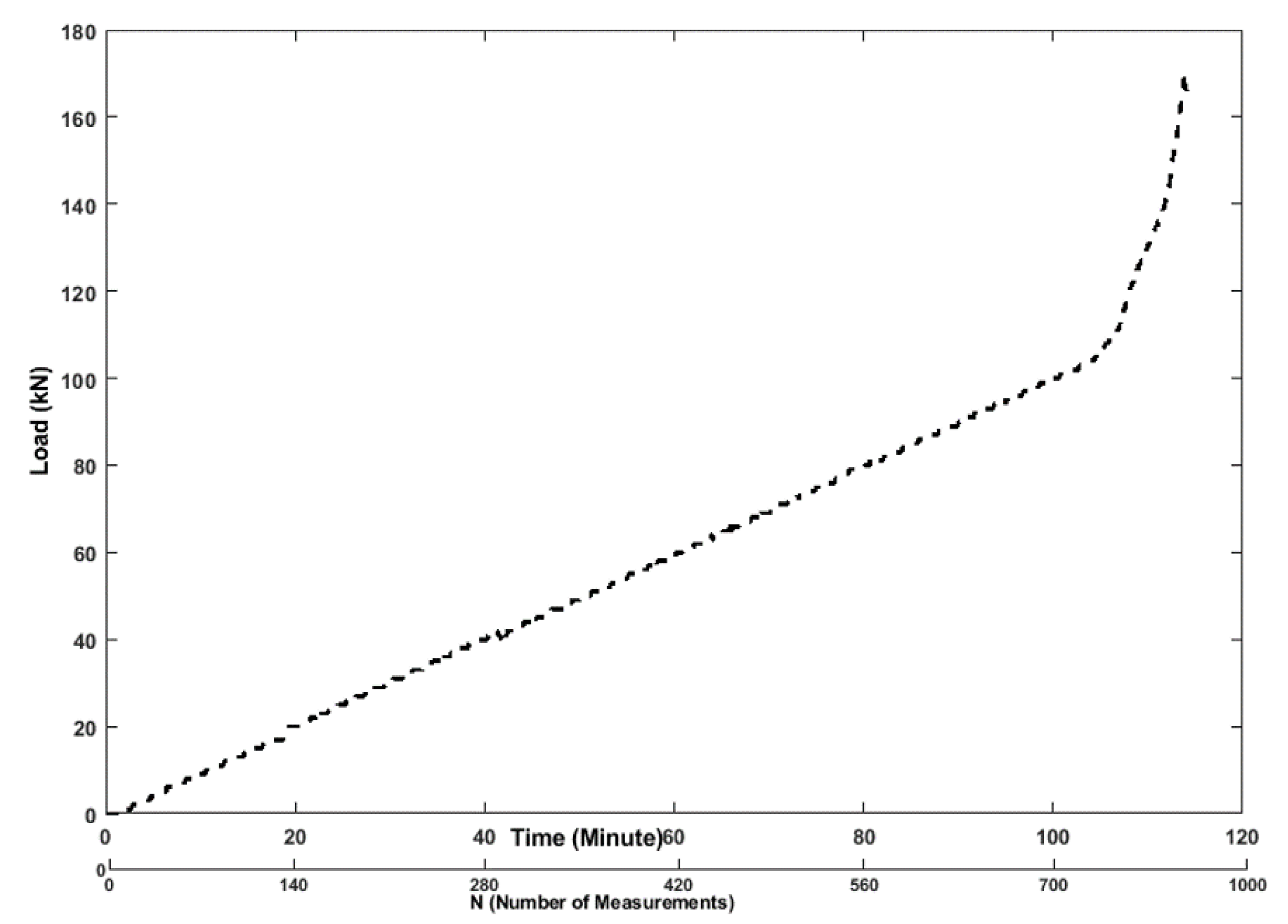
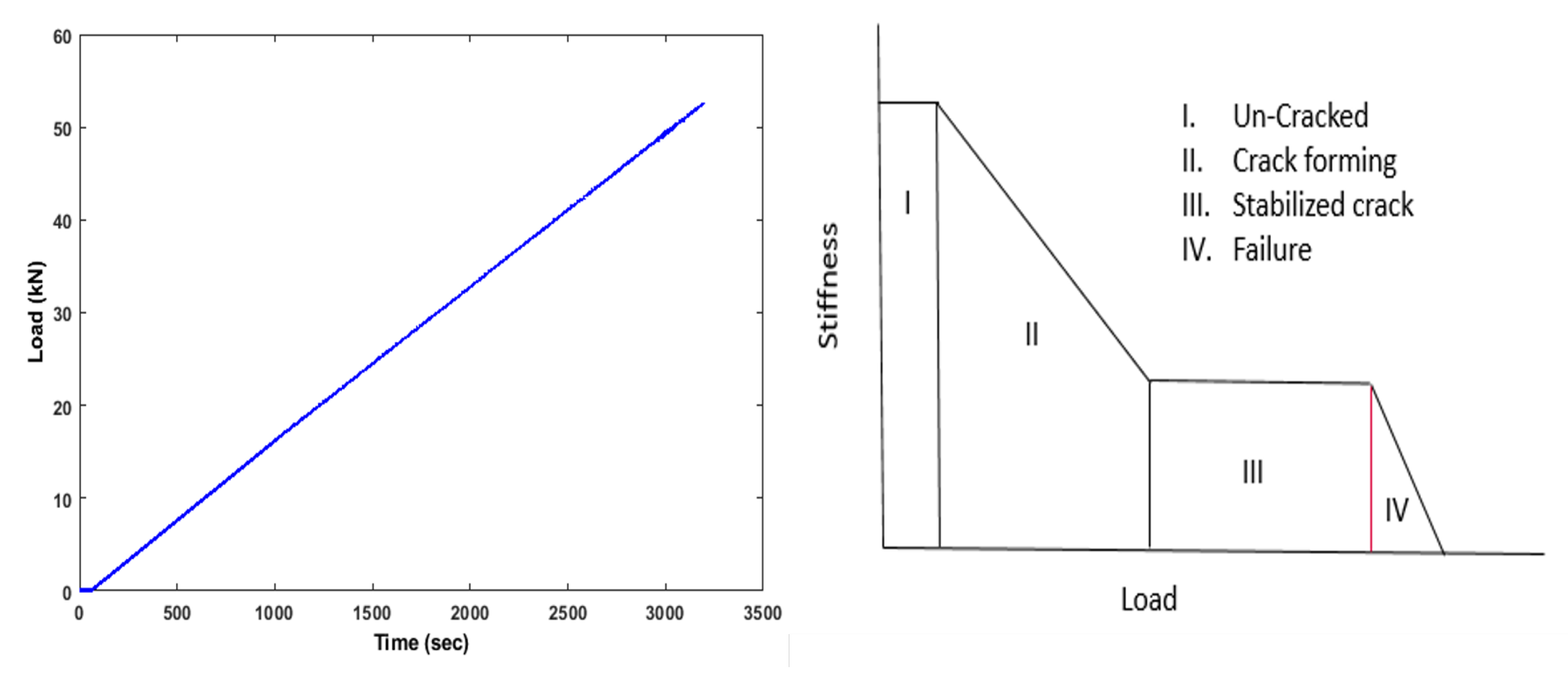
2.2. Data Acquisition System and Loading Schedule
2.3. Methodology
2.4. Feature Extraction from Ultrasonic Signals
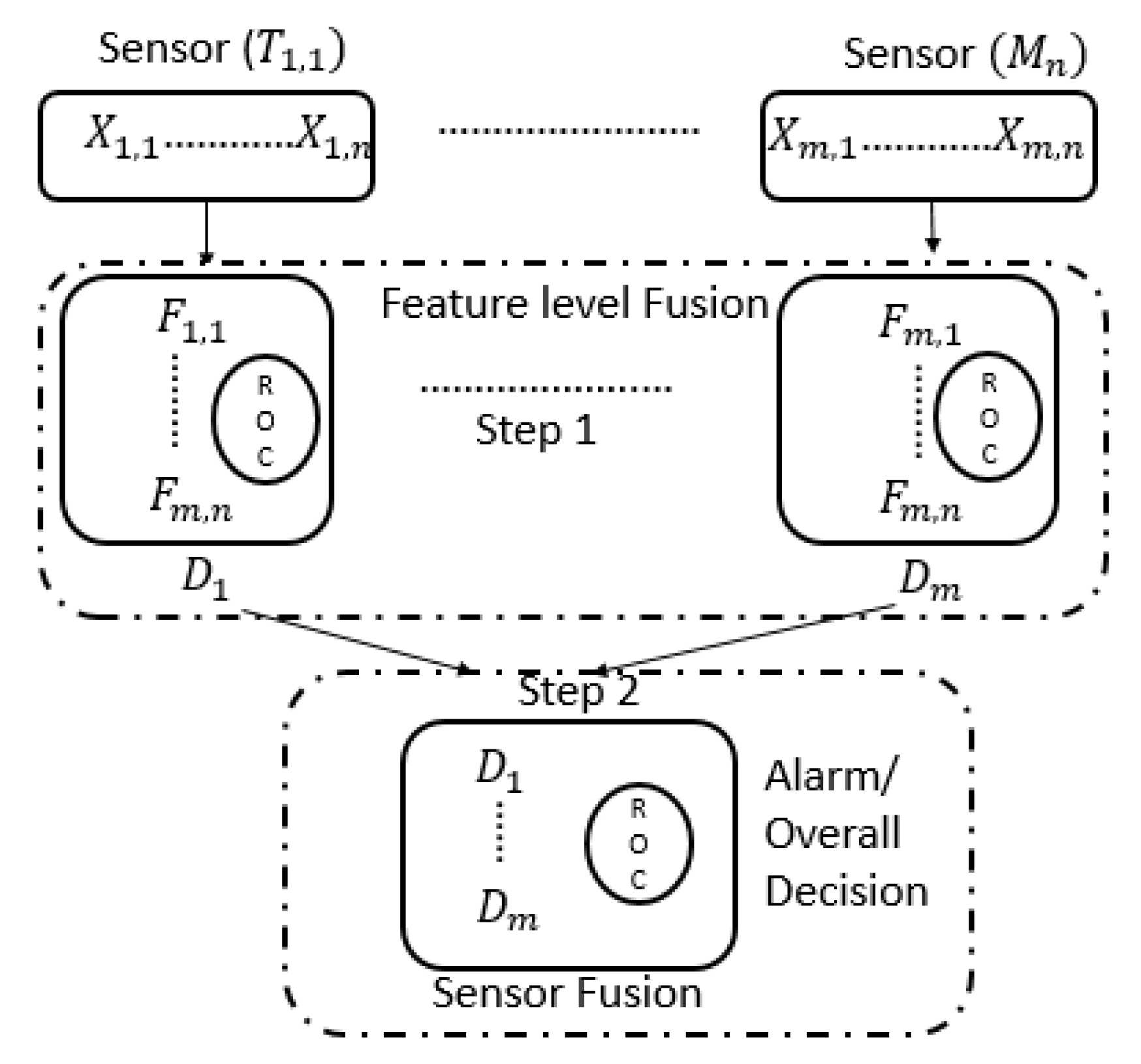
2.5. Information Fusion
2.6. Digital Image Correlation
3. Test Results and Discussion
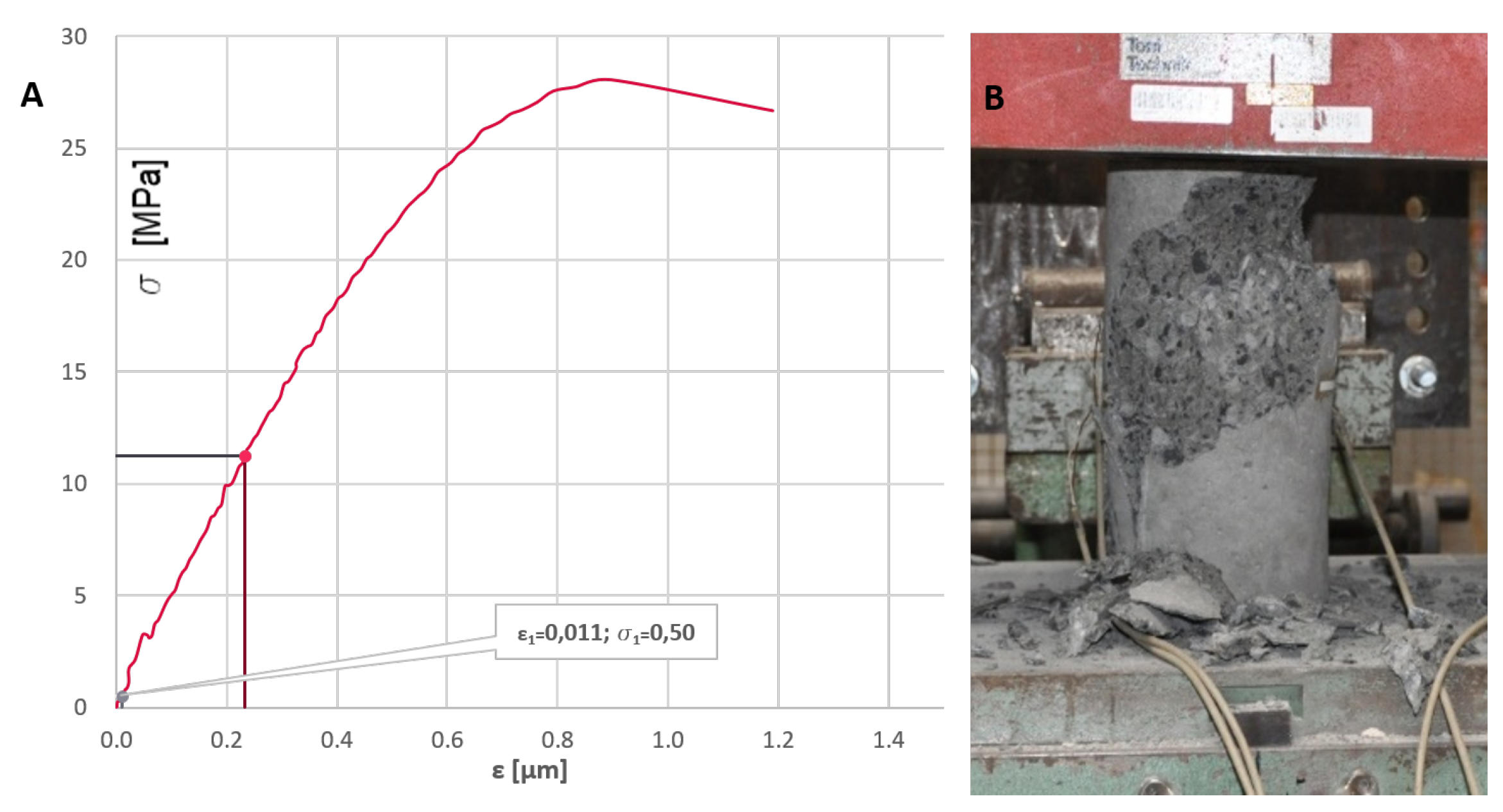
3.1. Flexural Performance
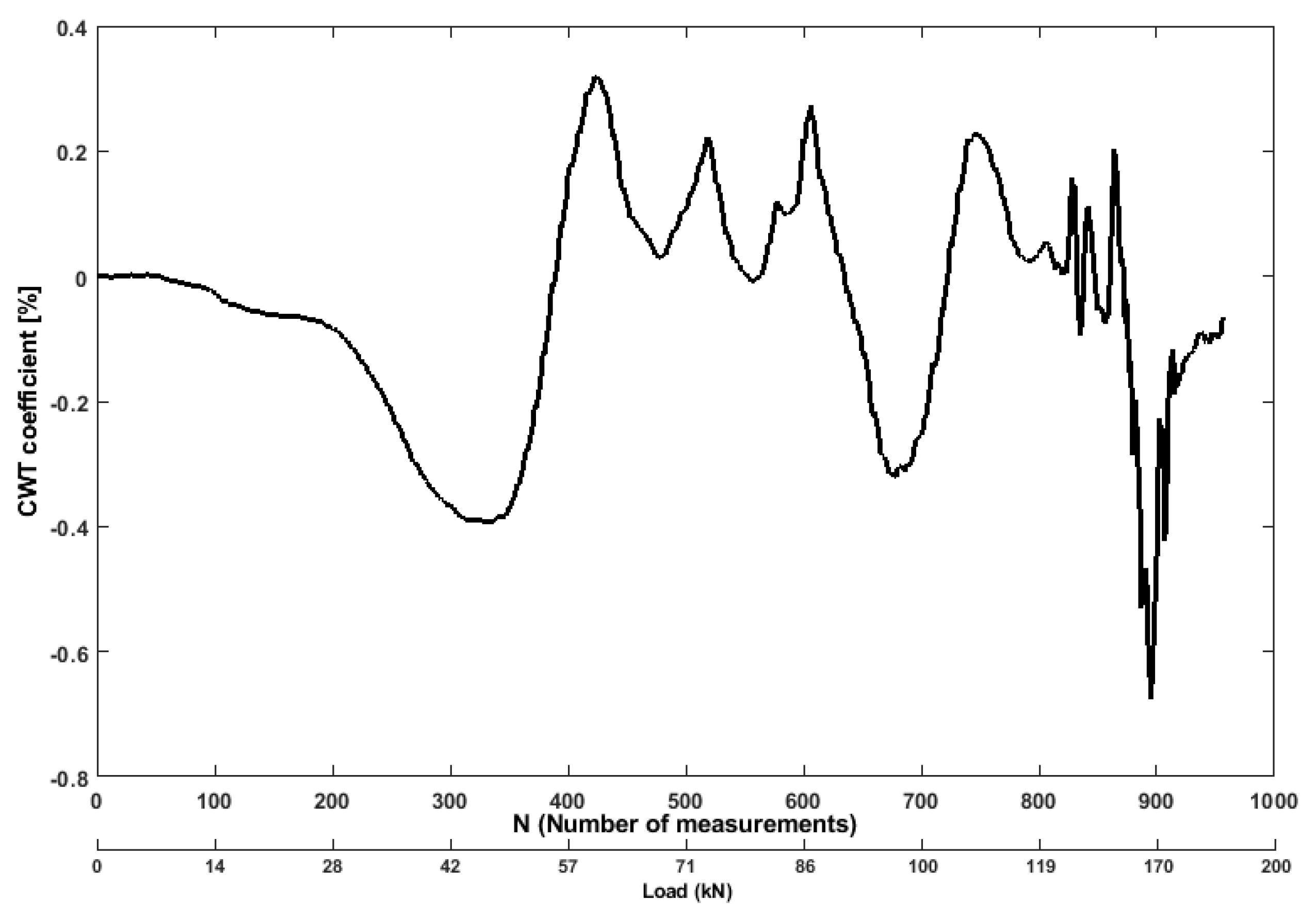
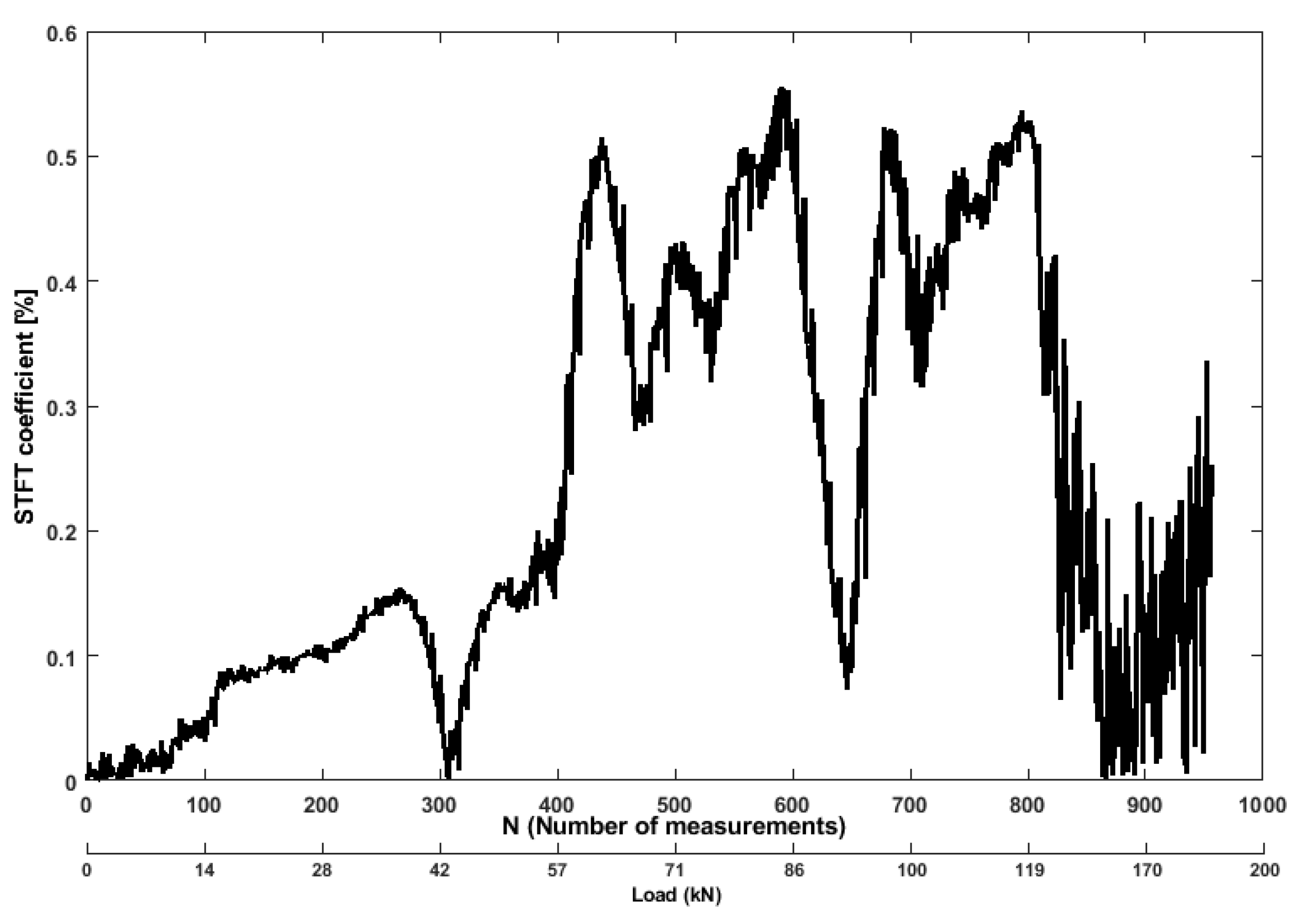
3.2. Analysis of Ultrasonic Features
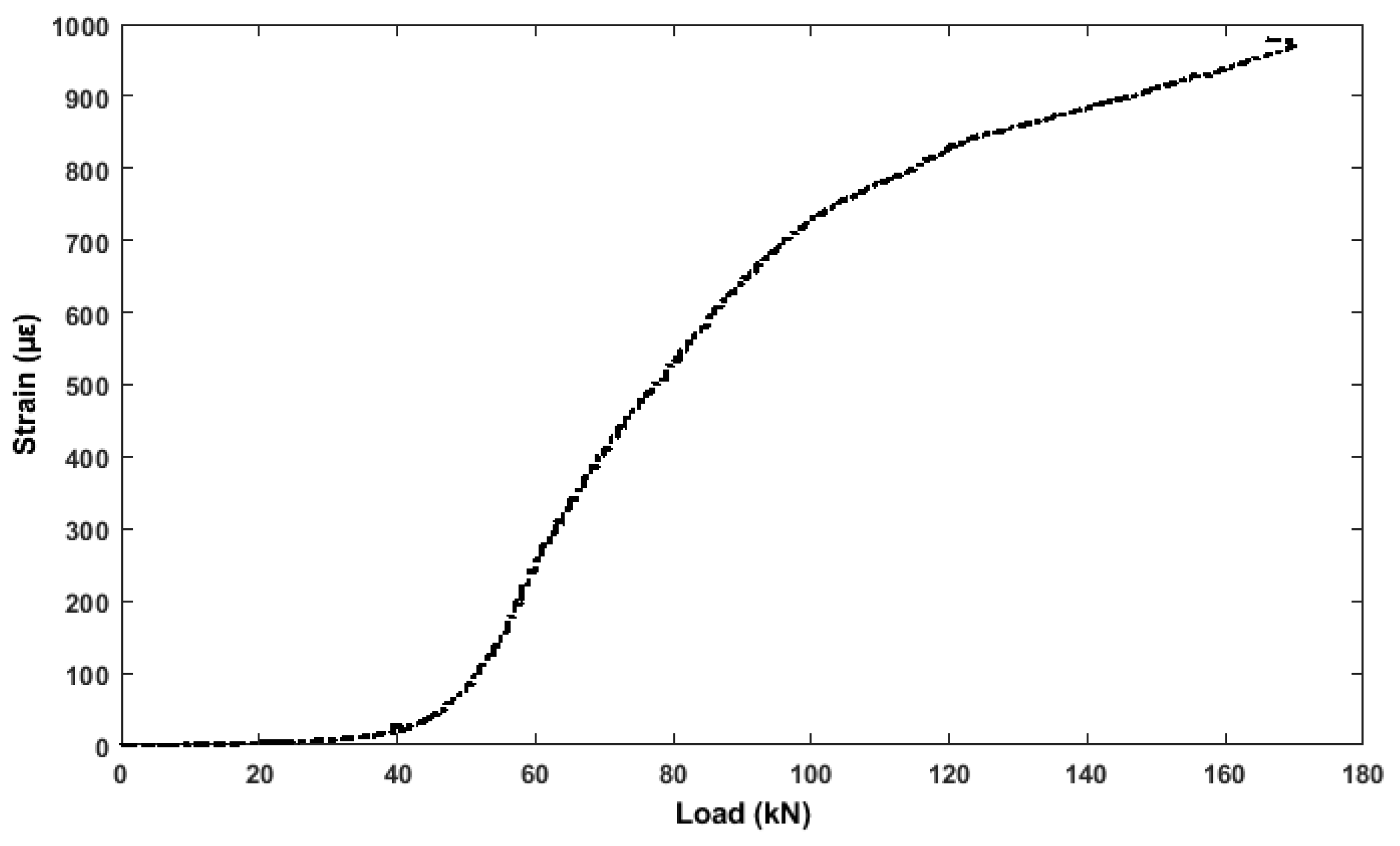
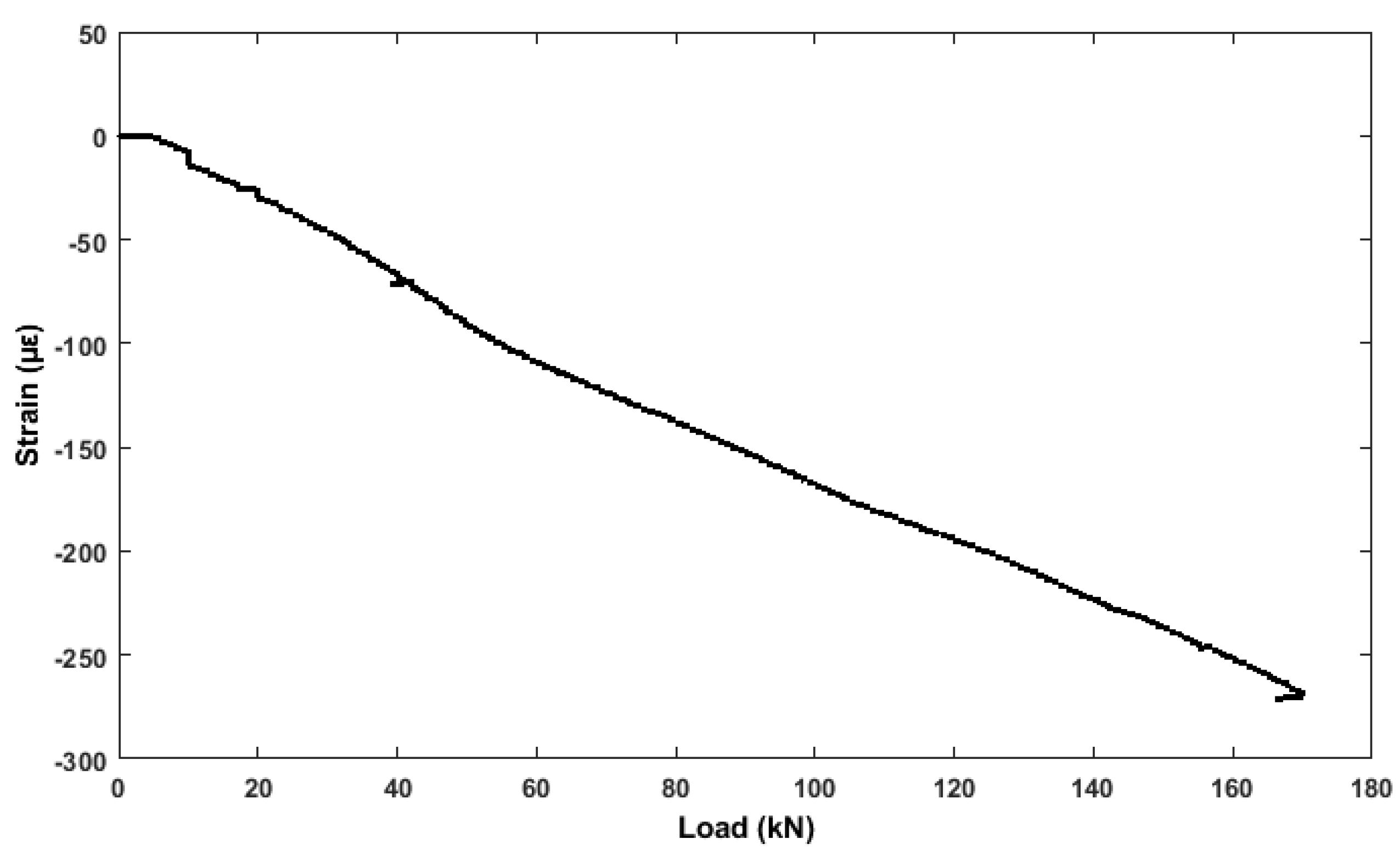
3.3. Analysis of Embedded Strain Gauges
3.4. Analysis of DIC
3.5. Features Comparison Using ROC Curve
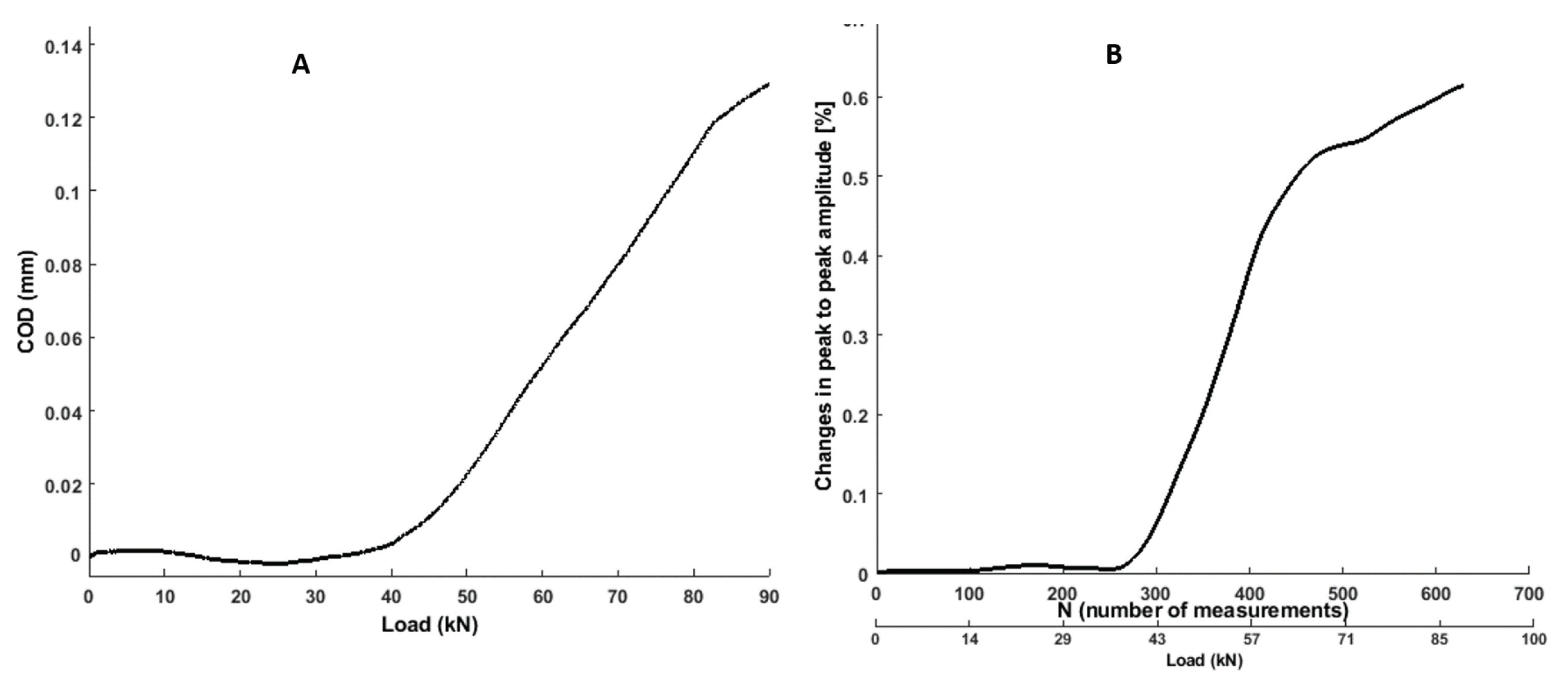
3.6. Crack Opening Displacement
3.7. Discussion
- At the beginning of the test, all the features of the test specimen were weak, displaying minimal changes (energy release). At this stage, the specimen was under a confining pressure and axial loading stress on the top (N = 240). The specimen was experiencing elastic deformation.
- The sudden decrease of change/damage index from all the features could be observed before the appearance of the first vertical cracks observed by DIC.
- In the second stage, the rate of changes in all the features remained at a high level. Due to the rapid expansion of internal cracks in the concrete, the reinforced concrete produced large deformation. The changes in the ultrasonic features were extremely intensive. Therefore, the rate of the structural changes reached its peak (energy was released from multiple cracks), even when the load was decrease to 20 kN (after the test) but the changes remain same (N = 800, after 170 kN). This can be used as a parameter for final decision about structural condition.
- As it can be noticed from Table 2, all the sensors detected the crack properly and with a very high sensitivity. This is because the cracks appear in the middle of the tested beam where most of the sensors were located.
- The declaration of the structural status (“damaged” and “undamaged”) is very important, therefore proposed information-based fusion using voting index provide more accurate results (e.g., AR feature provided misleading damage status when the beam was undamaged stage (N = 50, after 7 kN)).
- At this stage of research, the study has been limited to diagnostics of reinforced concrete reference structure based on four ultrasonic transducers. Such configuration allows detecting damage within the path of propagating waves without the possibility of precise damage localization. It is important to note that ultrasonic sensors and the related features are the most sensitive to initiating and propagating cracks among the measurement techniques considered in this study.
- The two pairs of ultrasonic transducers can reveal the concrete damage process of constituent and interfaces in different ways. The signal-level fusion approach to combine the information coming from both pair of sensors should be integrated to precisely and accurately predict the concrete damage evolution. This goal is the next research step of the authors.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| RC | Reinforced concrete |
| BAM | Bundesanstalt für Materialforschung und -prüfung |
| NDT | Non-Destructive Testing |
| CWI | Coda wave interferometry |
| AR | Autoregressive model |
| CC | Decorrelation coefficient |
| CWT | Continuous wavelet transform |
| STFT | Short-time Fourier transform |
| UPV | Ultrasonic pulse velocity |
| AE | Acoustic emission |
| DIC | Digital image correlation and tracking |
| LVDT | Linear variable differential transducer |
| ROC | Receiver operating characteristic |
References
- Kumar Mehta, P.; Monteiro, P.J.M. Concrete: Microstructure, Properties, and Materials, 3rd ed.; McGraw-Hill Education Ltd.: New York, NY, USA, 2006. [Google Scholar]
- Malhotra, V.; Carino, N.J. Handbook on Nondestructive Testing of Concrete; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Ohtsu, M. Acoustic Emission and Related Non-Destructive Evaluation Techniques in the Fracture Mechanics of Concrete: Fundamentals and Applications; Woodhead Publishing: Oxford, UK, 2015; Chapter 1; pp. 1–14. [Google Scholar]
- Ohno, K.; Ohtsu, M. Crack classification in concrete based on acoustic emission. Constr. Build. Mater. 2010, 24, 2339–2346. [Google Scholar] [CrossRef]
- Hoła, J. Acoustic-emission investigation of failure of high strength concrete. Arch. Acoust. 1999, 24, 233–244. [Google Scholar]
- Goszczyńska, B.; Świt, G.; Trąmpczyński, W.; Krampikowska, A.; Tworzewska, J.; Tworzewski, P. Experimental validation of concrete crack identification and location with acoustic emission method. Arch. Civ. Mech. Eng. 2012, 12, 23–28. [Google Scholar] [CrossRef]
- Tran, Q.H.; Huh, J.; Mac, V.H.; Kang, C.; Han, D. Effects of rebars on the detectability of subsurface defects in concrete bridges using square pulse thermography. NDT E Int. 2018, 100, 92–100. [Google Scholar] [CrossRef]
- Abu Dabous, S.; Yaghi, S.; Alkass, S.; Moselhi, O. Concrete bridge deck condition assessment using IR Thermography and Ground Penetrating Radar technologies. Autom. Constr. 2017, 81, 340–354. [Google Scholar] [CrossRef]
- Szymanik, B.; Frankowski, P.; Chady, T.; Chelliah, C.J. Detection and Inspection of Steel Bars in Reinforced Concrete Structures Using Active Infrared Thermography with Microwave Excitation and Eddy Current Sensors. Sensors 2016, 16, 234. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.; Wiggenhauser, H.; Helmerich, R.; Dong, B.; Dong, P.; Xing, F. Long-term monitoring of reinforcement corrosion in concrete using ground penetrating radar. Corros. Sci. 2017, 114, 123–132. [Google Scholar] [CrossRef]
- Morris, I.; Abdel-Jaber, H.; Glisic, B. Quantitative Attribute Analyses with Ground Penetrating Radar for Infrastructure Assessments and Structural Health Monitoring. Sensors 2019, 19, 1637. [Google Scholar] [CrossRef] [PubMed]
- Sun, H.; Pashoutani, S.; Zhu, J. Nondestructive Evaluation of Concrete Bridge Decks with Automated Acoustic Scanning System and Ground Penetrating Radar. Sensors 2018, 18, 1955. [Google Scholar] [CrossRef]
- Lachowicz, J.; Rucka, M. Application of GPR method in diagnostics of reinforced concrete structures. Diagnostyka 2015, 16, 31–36. [Google Scholar]
- Deng, L.; Cai, C.S. Applications of fiber optic sensors in civil engineering. Struct. Eng. Mech. 2007, 25, 577–596. [Google Scholar] [CrossRef]
- Miller, S.; Chakraborty, J.; van der Vegt, J.; Brinkerink, D.; Erkens, S.; Liu, X.; Anupam, K.; Sluer, B.; Mohajeri, M. Smart sensors in asphalt: Monitoring key process parameters during and post construction. SPOOL 2017, 4, 45–48. [Google Scholar] [CrossRef]
- Smith, G.M.; Higgins, O.; Sampath, S. In-situ observation of strain and cracking in coated laminates by digital image correlation. Surf. Coat. Technol. 2017, 328, 211–218. [Google Scholar] [CrossRef]
- Gajewski, T.; Garbowski, T. Calibration of concrete parameters based on digital image correlation and inverse analysis. Arch. Civ. Mech. Eng. 2014, 14, 170–180. [Google Scholar] [CrossRef]
- Kozicki, J.; Tejchman, J. Experimental Investigations of Strain Localization in Concrete using Digital Image Correlation (DIC) Technique. Arch. Hydroengineering Environ. Mech. 2007, 54, 3–24. [Google Scholar]
- Gao, M.B.; Li, T.B.; Meng, L.B.; Ma, C.C.; Xing, H.L. Identifying crack initiation stress threshold in brittle rocks using axial strain stiffness characteristics. J. Mt. Sci. 2018, 15, 1371–1382. [Google Scholar] [CrossRef]
- Salami, Y.; Dano, C.; Hicher, P.Y. Infrared thermography of rock fracture. Géotechnique Lett. 2017, 7, 36–40. [Google Scholar] [CrossRef]
- Chróścielewski, J.; Miśkiewicz, M.; Pyrzowski; Rucka, M.; Sobczyk, B.; Wilde, K. Modal properties identification of a novel sandwich footbridge–Comparison of measured dynamic response and FEA. Compos. Part B Eng. 2018, 151, 245–255. [Google Scholar] [CrossRef]
- Marcantonio, V.; Monarca, D.; Colantoni, A.; Cecchini, M. Ultrasonic waves for materials evaluation in fatigue, thermal and corrosion damage: A review. Mech. Syst. Signal Process. 2019, 120, 32–42. [Google Scholar] [CrossRef]
- Zhong, W.; Yao, W. Influence of damage degree on self-healing of concrete. Constr. Build. Mater. 2008, 22, 1137–1142. [Google Scholar] [CrossRef]
- Lu, G.; Feng, Q.; Li, Y.; Wang, H.; Song, G. Characterization of Ultrasound Energy Diffusion Due to Small-Size Damage on an Aluminum Plate Using Piezoceramic Transducers. Sensors 2017, 17, 2796. [Google Scholar] [CrossRef] [PubMed]
- Niederleithinger, E.; Wolf, J.; Mielentz, F.; Wiggenhauser, H.; Pirskawetz, S. Embedded Ultrasonic Transducers for Active and Passive Concrete Monitoring. Sensors 2015, 15, 9756–9772. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Michaels, J.E. A methodology for structural health monitoring with diffuse ultrasonic waves in the presence of temperature variations. Ultrasonics 2005, 43, 717–731. [Google Scholar] [CrossRef] [PubMed]
- Pal Kaur, N.; Kumar Shah, J.; Majhi, S.; Mukherjee, A. Healing and simultaneous ultrasonic monitoring of cracks in concrete. Mater. Today Commun. 2019, 18, 87–99. [Google Scholar] [CrossRef]
- Quiviger, A.; Girard, A.; Payan, C.; Chaix, J.F.; Garnier, V.; Salin, J. Influence of the depth and morphology of real cracks on diffuse ultrasound in concrete: A simulation study. NDT E Int. 2013, 60, 11–16. [Google Scholar] [CrossRef]
- Quiviger, A.; Payan, C.; Chaix, J.F.; Garnier, V.; Salin, J. Effect of the presence and size of a real macro-crack on diffuse ultrasound in concrete. NDT E Int. 2012, 45, 128–132. [Google Scholar] [CrossRef]
- Michaels, J.E.; Michaels, T.E. Detection of structural damage from the local temporal coherence of diffuse ultrasonic signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 1769–1782. [Google Scholar] [CrossRef]
- Anugonda, P.; Wiehn, J.S.; Turner, J.A. Diffusion of ultrasound in concrete. Ultrasonics 2001, 39, 429–435. [Google Scholar] [CrossRef]
- In, C.W.; Kim, J.Y.; Jacobs, L.L.; Kurtis, K. Crack depth measurement in concrete using diffuse ultrasound. AIP Conf. Proc. 2012, 1430, 1485–1492. [Google Scholar] [CrossRef]
- Ahn, E.; Gwon, S.; Kim, H.; Kim, C.; Sim, S.H.; Shin, M. Applicability of Diffuse Ultrasound to Evaluation of the Water Permeability and Chloride Ion Penetrability of Cracked Concrete. Sensors 2018, 18, 4156. [Google Scholar] [CrossRef]
- Bassil, A.; Wang, X.; Chapeleau, X.; Niederleithinger, E.; Abraham, O.; Leduc, D. Distributed Fiber Optics Sensing and Coda Wave Interferometry Techniques for Damage Monitoring in Concrete Structures. Sensors 2019, 19, 356. [Google Scholar] [CrossRef] [PubMed]
- Heideklang, R.; Shokouhi, P. Application of data fusion in nondestructive testing (NDT). In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 835–841. [Google Scholar]
- Fröjd, P.; Ulriksen, P. Frequency selection for coda wave interferometry in concrete structures. Ultrasonics 2017, 80, 1–8. [Google Scholar] [CrossRef]
- Stähler, S.C.; Sens-Schönfelder, C.; Niederleithinger, E. Monitoring stress changes in a concrete bridge with coda wave interferometry. J. Acoust. Soc. Am. 2011, 129, 1945–1952. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Planès, T.; Larose, E.; Obermann, A.; Rospars, C.; Moreau, G. Diffuse ultrasound monitoring of stress and damage development on a 15-ton concrete beam. J. Acoust. Soc. Am. 2016, 139, 1691–1701. [Google Scholar] [CrossRef] [PubMed]
- Larose, E.; Hall, S. Monitoring stress related velocity variation in concrete with a 2×10-5 relative resolution using diffuse ultrasound. J. Acoust. Soc. Am. 2009, 125, 1853–1856. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Abraham, O.; Larose, E.; Planes, T.; Duff, A.L.; Lascoup, B.; Tournat, V.; Guerjouma, R.E.; Cottineau, L.M.; Durand, O.; et al. Following stress level modification of real size concrete structures with coda wave interferometry (CWI). AIP Conf. Proc. 2011, 1335, 1291. [Google Scholar] [CrossRef]
- Zhang, Y.; Abraham, O.; Grondin, F.; Loukili, A.; Tournat, V.; Duff, A.L.; Lascoup, B.; Durand, O. Study of stress-induced velocity variation in concrete under direct tensile force and monitoring of the damage level by using thermally-compensated Coda Wave Interferometry. Ultrasonics 2012, 52, 1038–1045. [Google Scholar] [CrossRef]
- Niederleithinger, E.; Wunderlich, C. Influence of small temperature variations on the ultrasonic velocity in concrete. AIP Conf. Proc. 2013, 1511, 390–397. [Google Scholar] [CrossRef]
- Chakraborty, J.; Katunin, A. Detection of structural changes in concrete using embedded ultrasonic sensors based on autoregressive model. Diagnostyka 2019, 20, 103–110. [Google Scholar] [CrossRef]
- Berriman, J.; Hutchins, D.; Neild, A.; Gan, T.; Purnell, P. The application of time-frequency analysis to the air-coupled ultrasonic testing of concrete. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 768–776. [Google Scholar] [CrossRef] [PubMed]
- Ongpeng, J.M.C.; Oreta, A.W.C.; Hirose, S. Contact and Noncontact Ultrasonic Nondestructive Test in Reinforced Concrete Beam. Adv. Civ. Eng. 2018, 2018, 1–10. [Google Scholar] [CrossRef]
- Chakraborty, J.; Katunin, A.; Klikowicz, P.; Salamak, M. Embedded ultrasonic transmission sensors and signal processing techniques for structural change detection in the Gliwice bridge. Procedia Struct. Integr. 2019, 17, 387–394. [Google Scholar] [CrossRef]
- Liu, Q.C.; Wang, H.P.B. A case study on multisensor data fusion for imbalance diagnosis of rotating machinery. Artif. Intell. Eng. Des. Anal. Manuf. 2001, 15, 203–210. [Google Scholar] [CrossRef]
- Metz, C.E. Receiver Operating Characteristic Analysis: A Tool for the Quantitative Evaluation of Observer Performance and Imaging Systems. J. Am. Coll. Radiol. 2019, 3, 413–422. [Google Scholar] [CrossRef] [PubMed]
- Liggins, M.E.; Hall, D.L.; Llinas, J. Handbook of Multisensor Data Fusion: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Barnby, J.T.; Nadkarni, A.S.; Cresswell, S.L. Experimental determination of crack tip angles (CTOA) and their applicability to instability prediction in structures. Int. J. Mater. Prod. Technol. 2014, 10, 161–170. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Description | Equation |
|---|---|---|
| Peak Amplitude | Distinctive peak to peak amplitude | |
| AR | Distinctive of AR amplitude | |
| CC | Distinctive of the waveform changes | |
| CWT | Differential energy in frequency domain using wavelet transform | |
| STFT | Differential energy in frequency domain |
| NDT Methods | AUC |
|---|---|
| Ultrasonic | 1 |
| LVDT | 0.994 |
| DIC (deflection) | 0.992 |
| Strain gauge | 0.985 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chakraborty, J.; Katunin, A.; Klikowicz, P.; Salamak, M. Early Crack Detection of Reinforced Concrete Structure Using Embedded Sensors. Sensors 2019, 19, 3879. https://doi.org/10.3390/s19183879
Chakraborty J, Katunin A, Klikowicz P, Salamak M. Early Crack Detection of Reinforced Concrete Structure Using Embedded Sensors. Sensors. 2019; 19(18):3879. https://doi.org/10.3390/s19183879
Chicago/Turabian StyleChakraborty, Joyraj, Andrzej Katunin, Piotr Klikowicz, and Marek Salamak. 2019. "Early Crack Detection of Reinforced Concrete Structure Using Embedded Sensors" Sensors 19, no. 18: 3879. https://doi.org/10.3390/s19183879
APA StyleChakraborty, J., Katunin, A., Klikowicz, P., & Salamak, M. (2019). Early Crack Detection of Reinforced Concrete Structure Using Embedded Sensors. Sensors, 19(18), 3879. https://doi.org/10.3390/s19183879