3.1. Simulated Data
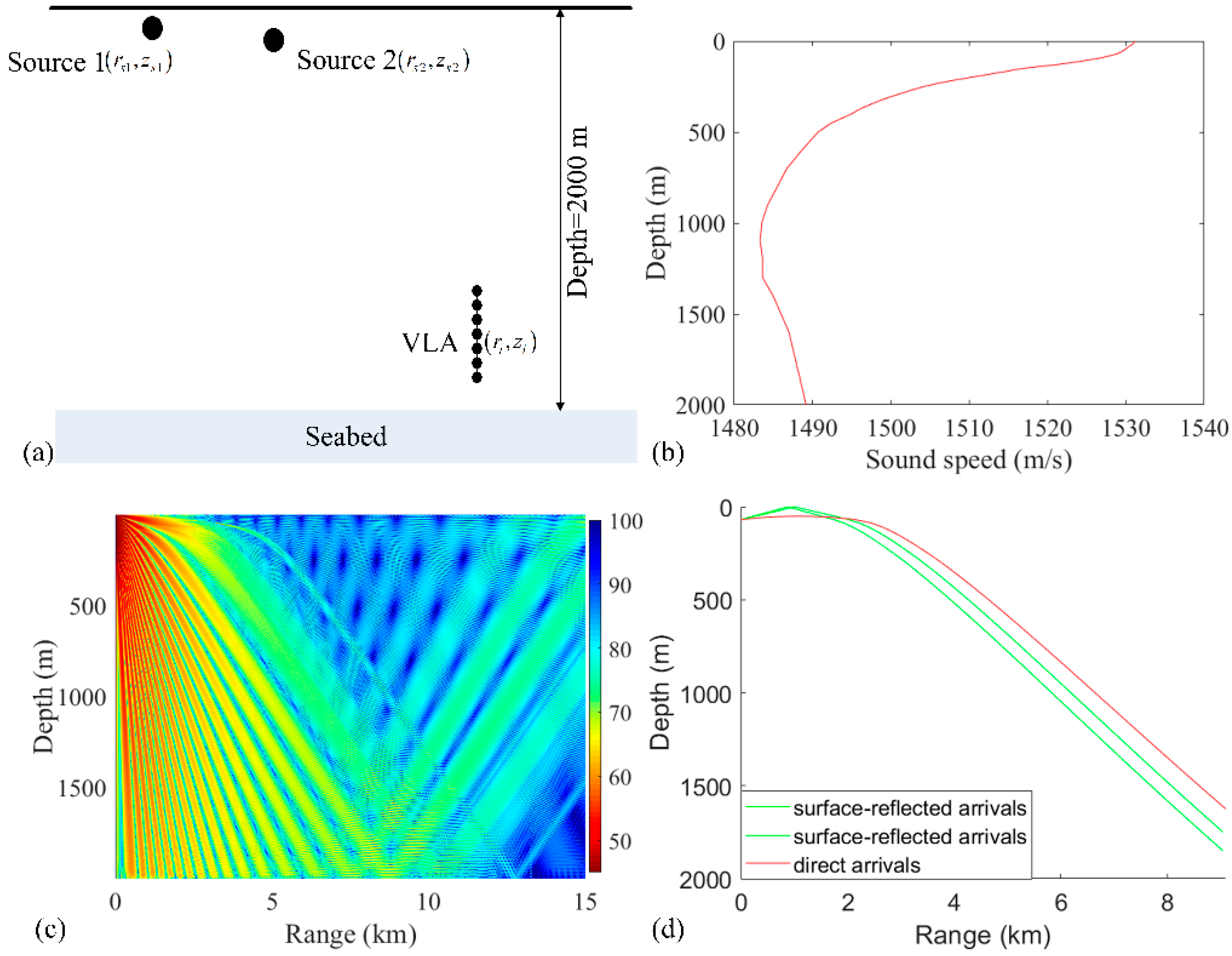
The RAMPMF method is applied to a simulated dataset and experimental data to compare the different processors and demonstrate the performance. A VLA was used for this simulation including 32 hydrophones, which were deployed from 1735 to 1859 m with a 4 m interval. Two sources both at frequency 187 Hz were treated as the target sources. A flat bathymetry was at a depth of 2000 m. The schematic geometry of the acoustic propagation in this scenario is shown in
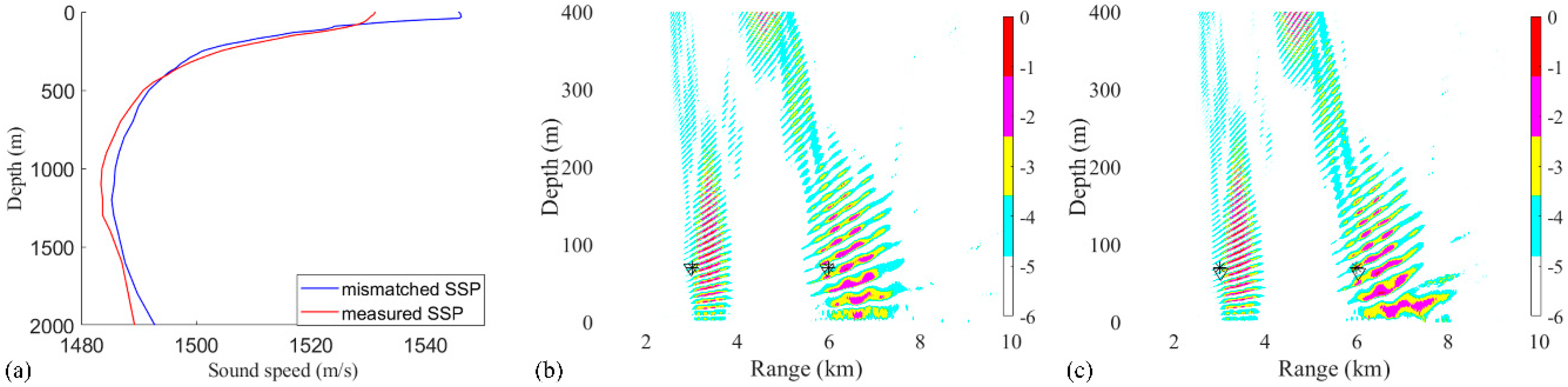
Figure 2a. The sound speed profile in the water was measured by a conductivity–temperature–depth (CTD) probe near the VLA in the experiment, as shown in
Figure 2b.
Figure 2c shows that the transmission loss (TL) received on the VLA below 1700 m is less than that on the sea surface in the range from 3 to 9 km. This is because the main energy received in the VLA is contributed by the direct arrivals and surface-reflected arrivals, as shown in
Figure 2d. In fact, the ranges of interest are from 1 to 15 km and the depths of interest are from 0 to 400 m in the deep ocean. One reason for this is that the propagation path of the sound wave is curved due to the depth-dependent sound speed profile, as shown in
Figure 2d. These characteristic limits the direction of the sources. The elevation angles of the region of interest are between endfire and boresight.
In the numerical simulation, the ray model BELLHOP [
28] was used to compute the replica vectors at a single frequency of 187 Hz. The corresponding half-wavelength approximates the spacing of the VLA. The sound speed of the compressional wave as well as the density and attenuation coefficient of the sediment were 1550 m/s, 1310 kg/m
3, and 0.15 dB/λ, respectively. The range-dependent environmental factors, such as sound fluctuation caused by internal waves, were neglected. Therefore, the theory of reciprocity [
29] was applied to this scenario to reduce the computation, and each of hydrophones of the VLA was treated as a virtual source to obtain the replicas. The search area was (0.4 km, 15 km) × (0 m, 400 m) with a range and depth discretization of 20 and 1 m, respectively.
A two-source scenario (sources 1 and 2) is considered in the abovementioned environment. The positions of source 1 and source 2 are (3 km, 70 m) and (6 km, 10 m), respectively. The Gaussian white noise, which is identically distributed, is added into the signals to obtain:
where
represents the Green function between the
ith (
i = 1, 2) source and the VLA. Each
is the complex amplitude vector for the
ith source, which is chosen independently from a uniform distribution for each snapshot to construct the sources. Each snapshot has the same signal-to-noise ratio (SNR). The definition of the average SNR at one hydrophone of the VLA for the source is shown below [
28,
29]:
where
is the complex magnitude for the
l-th snapshot. In addition, the SNRs in the simulations were the ratios of the summation of time domain signals at 3 and 6 km to the white noise. The source magnitudes are determined with the assumption that the source 1 to source 2 ratio (SSR) is 5 dB. The SSR at different snapshot is defined as:
For the spatial filter, the elliptical norm weighting coefficients in range and depth (
and
) are assumed to be 72 and 8 m, respectively. The first five (nulling rank) columns of the eigenvector matrix are selected for constructing the projection matrix. In addition, the maximum iterative number is assumed to be 20. To analyze the performance of the RAMPMF method, the estimated range and source errors are expressed as:
where
and
are the estimated source range and depth of the peak in the ambiguity surface,
and
are the real source range and depth, respectively. In this two-source scenario, the estimated localization error for each source is computed. The accurate localization (estimation) of one source means that the estimated range and depth errors
and
are both below 10% in the configuration in this study as it can be seen below. Similarly, the accurate localization (estimation) of two sources refers to the accurate estimation to each source in the same realization. Especially, the Bartlett processor is always used as the benchmark for the comparisons between different methods in the underwater acoustics [
3,
6,
12,
18].
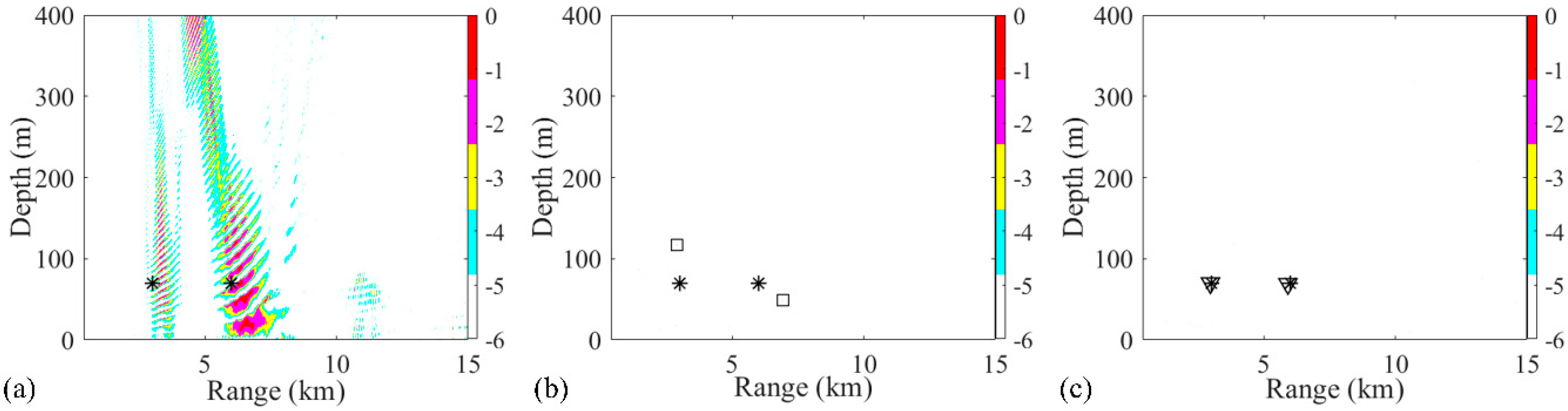
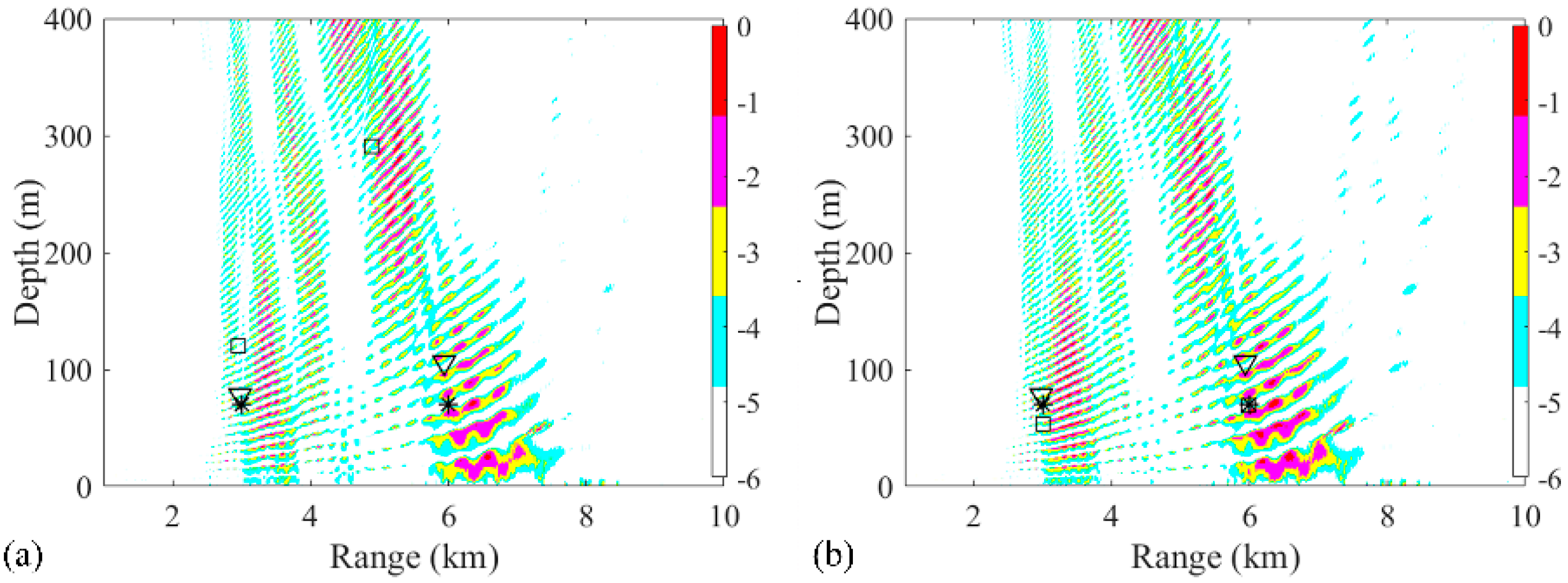
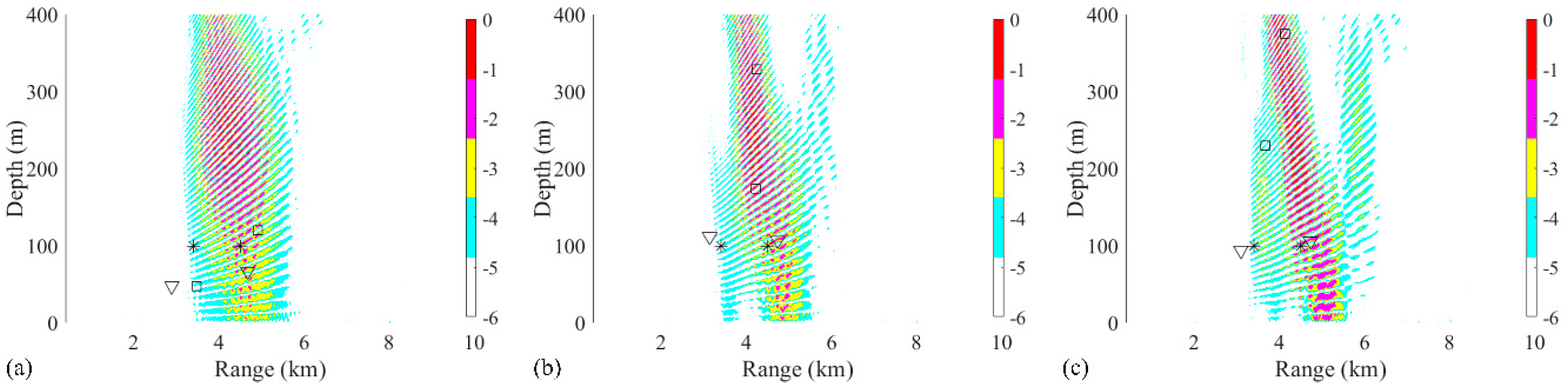
In the first two-source scenario, the positions of source 1 and source 2 are set as (3 km, 70 m) and (6 km, 70 m), respectively. The SNR at each snapshot is defined as 5 dB, and the number of snapshots is set to 28. The ambiguity surfaces (AMSs) of different processors are shown in
Figure 3. The range and depth coordinates are reduced to highlight the localized grids. The true source positions and the positions estimated by the RAMP and RAMPMF methods are represented as black asterisks, squares, and inverted triangles, respectively. Strong sidelobes exist in the AMS of the Bartlett processor in
Figure 3a. The two largest peaks in the AMS are (3.38 km, 70 m) and (7.32 km, 49 m), which are deviated from the true sources. Based on Equation (18), the range and depth errors corresponding to these points are (12.67% and 0%) and (22% and 30%), respectively. The estimated source positions obtained by the RAMP method are (2.9 km, 117 m) and (6.92 km, 49 m), as shown in
Figure 3b, which are the two grids corresponding to the two maximum values in the output
. The range errors are 3.33% and 15.3%, whereas the depth errors are large. Even for the given number of sources, the localization performance of RAMP is still poor. Part of the reason for this is that the CS method characteristically generates few solutions. The sparse solutions can be the same pseudo peaks that exist in the AMS of the Bartlett processor, as shown in
Figure 3a, and the values at the true positions are zero. Another possible reason is that the interference formed by the single-frequency source results in pseudo peaks at large distances from the true sources, such as the pseudo peaks that appear at (4 km, 400 m) in
Figure 3a. The output
of RAMPMF is shown in
Table 1. A repeated circle ((2.98 km, 70 m) and (5.92 km, 69 m)) can be obtained in the iterative loop. The length of this circle is 2, representing two localized sources obtained by the RAMPMF method. The range and depth errors are (0.67%, 0%) and (1.33%, 1.43%), respectively. Based on Equation (12), the ambiguity surface can be the summation of
and
, corresponding to the indices in the localization loops. In 500 Monte Carto realizations, the probability of the accurate estimation of two source positions was found to be 93.4%.
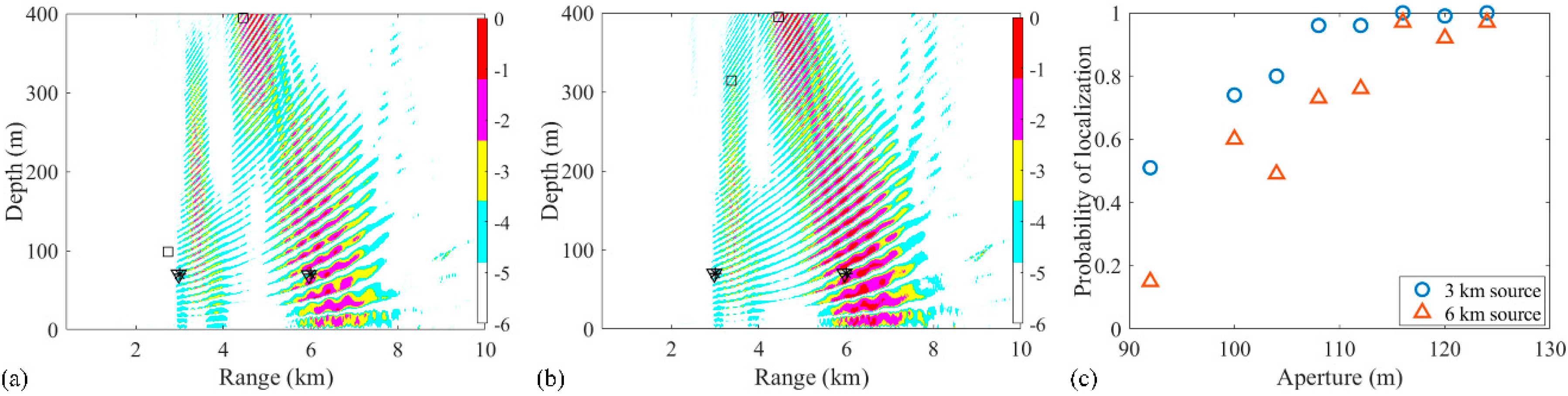
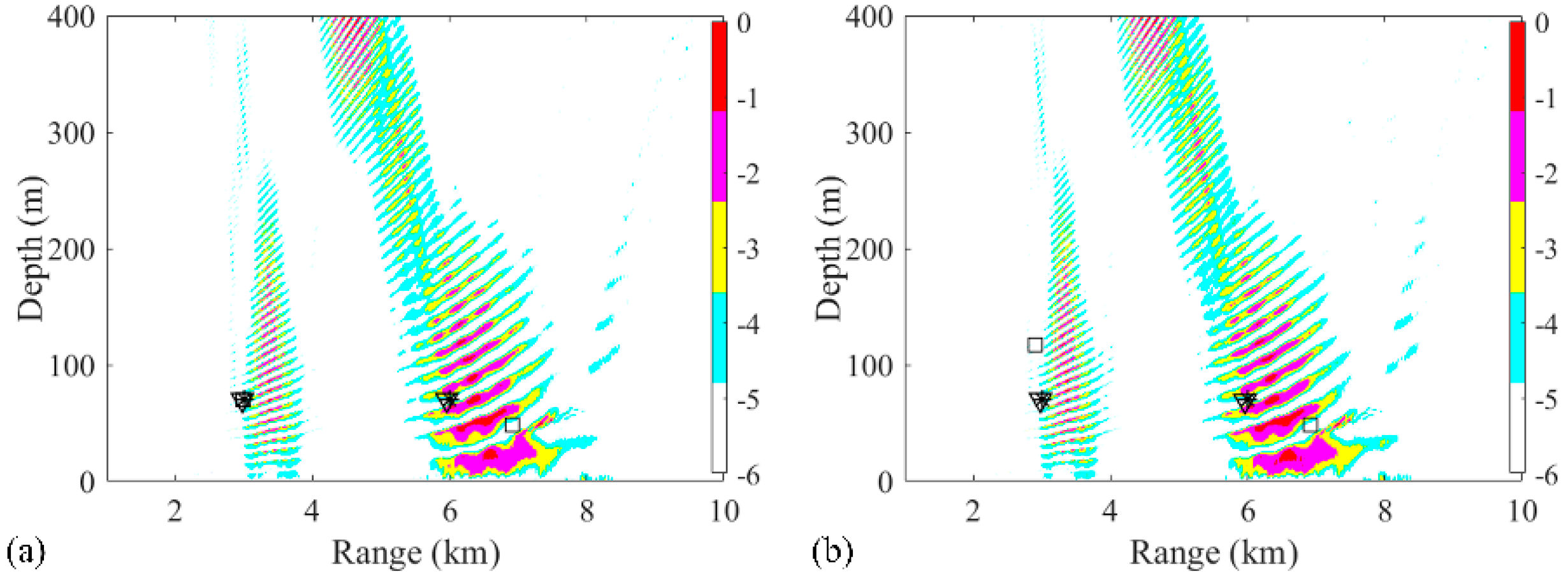
Due to the sparse solutions shown in
Figure 3, the results obtained from the RAMP and RAMPMF processors, which are represented as squares and inverted triangles, would be placed in the same figure generated by the Bartlett processor. Then, the effects of factors such as the array aperture, number of receivers, number of snapshots, and SNR on the localization results could be investigated. Only one factor was considered at a time, with the other factors remaining the same in the environment. First, the dependence of the localization on the array aperture was examined with a fixed spacing. The VLA was spaced between 1735 and 1835 m with a fixed spacing 4 m and the number of hydrophones was 26. The other parameters, such as SNR and SSR, remained the same. Similar to the results in
Figure 3, it is shown in
Figure 4a,b that the localization results by the RAMPMF method are better than the results of the two other processors. The probability of obtaining an accurate estimation of source depths with different apertures for 3 and 6 km sources is shown in
Figure 4c. A clear trend is shown, indicating that the localization performance can be improved by increasing the aperture of the VLA. And the probability of two-source localization above 0.9 can be achieved with the array length greater than 114 m, which is only 5.7% of the total water depth. On the other hand, the probability of depth estimation for an aperture less than 100 m is relatively low in the 2000-meter deep water. A possible reason for this is that is difficult to obtain an accurate solution with the measured vector of limited length and a large sensing matrix using CS theory. Besides, the columns of the sensing matrix are partially correlated, introducing error to the result.
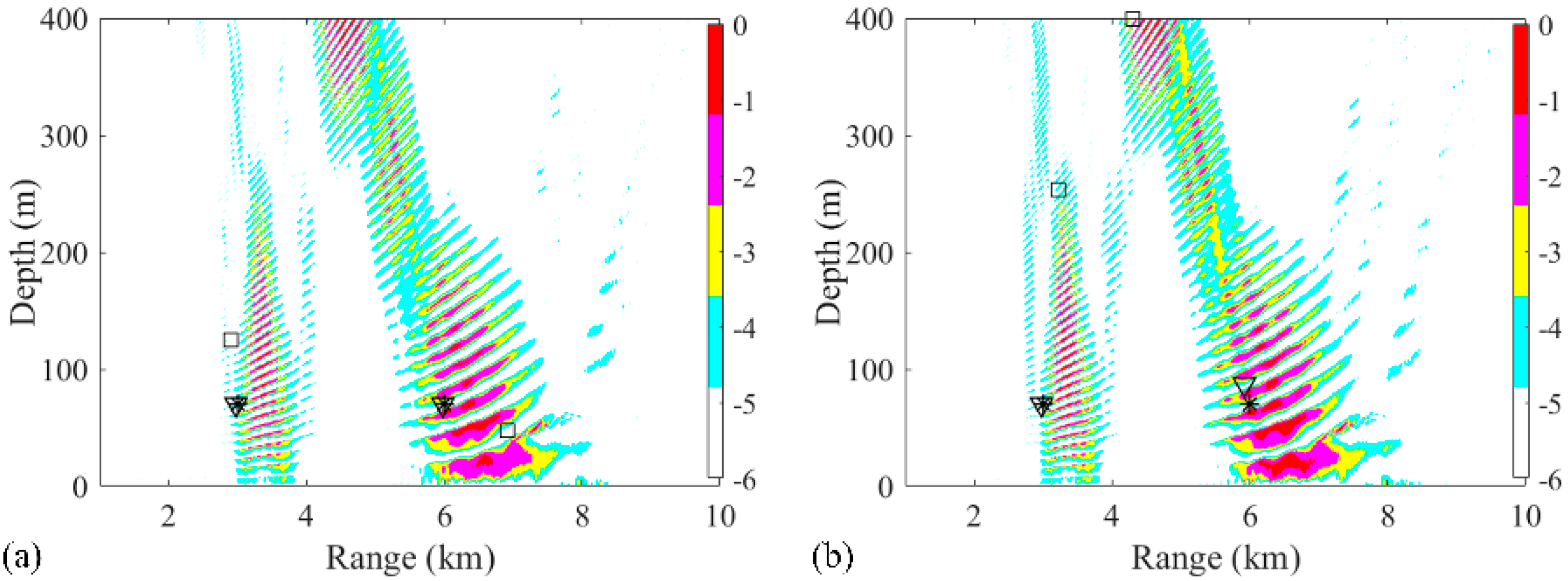
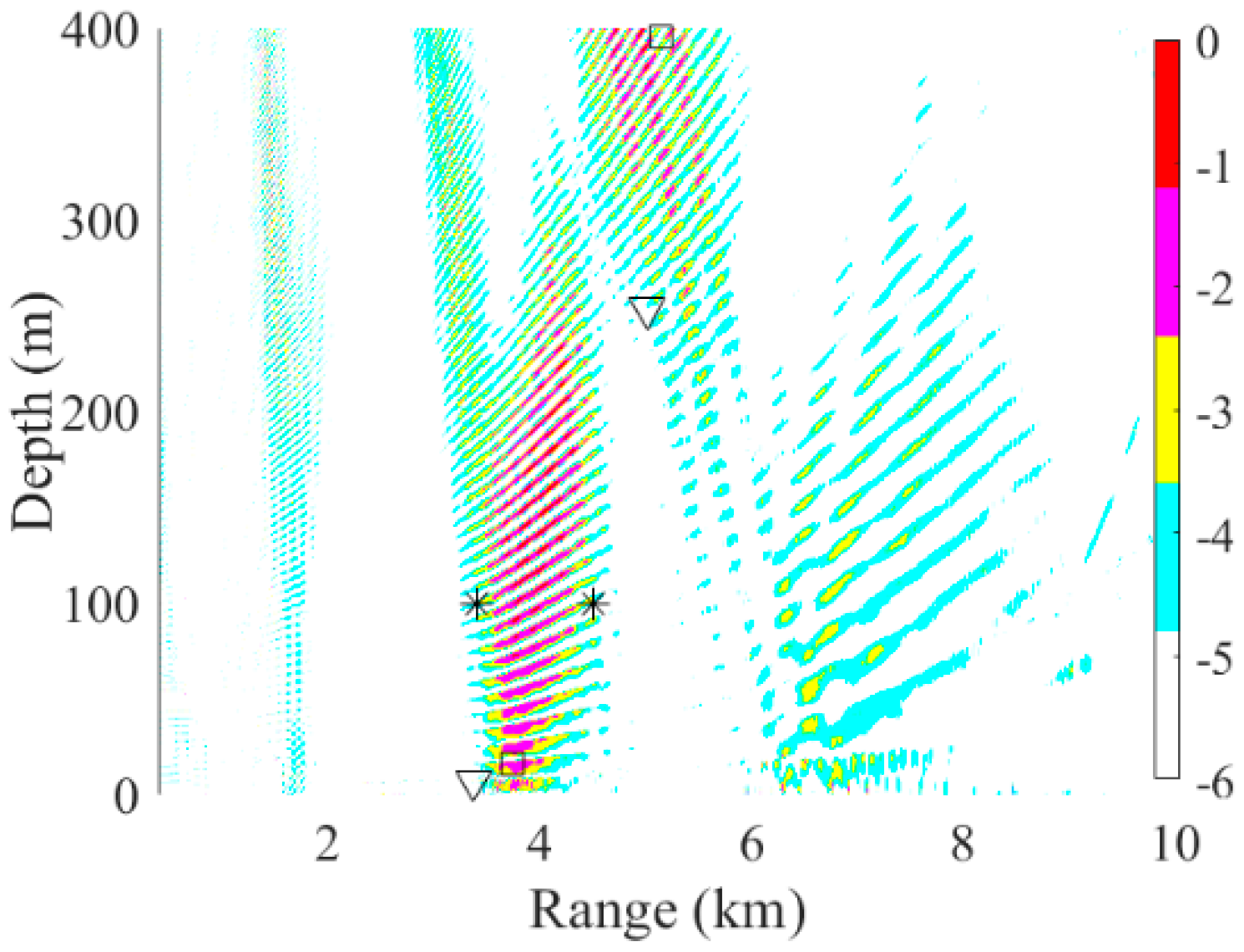
The second studied factor was the number of receivers, which corresponds to the element spacing with a given array aperture. In this environment, the number of receivers decreases to 16 and the spacing is approximately 8 m. The other parameters stay the same, such as SNR and SSR. The source localization performance by RAMPMF degrades, as shown in
Figure 5, whereas the main lobe in the AMS obtained by the Bartlett processor is similar, as shown in
Figure 3a, except for the increasing sidelobes. Therefore, using fewer hydrophones degrades the performance seriously for all the methods. When the spacing is about the same as the wavelength of the 187 Hz single-frequency signal, pseudo peaks (such as the grating lobe in the beam pattern) appear, and the true source positions are submerged in the AMS. On the other hand, the performances of different methods with 2 m spacing are shown in
Figure 6. It is indicated that the RAMPMF method performs well with a spacing that is no more than half the wavelength.
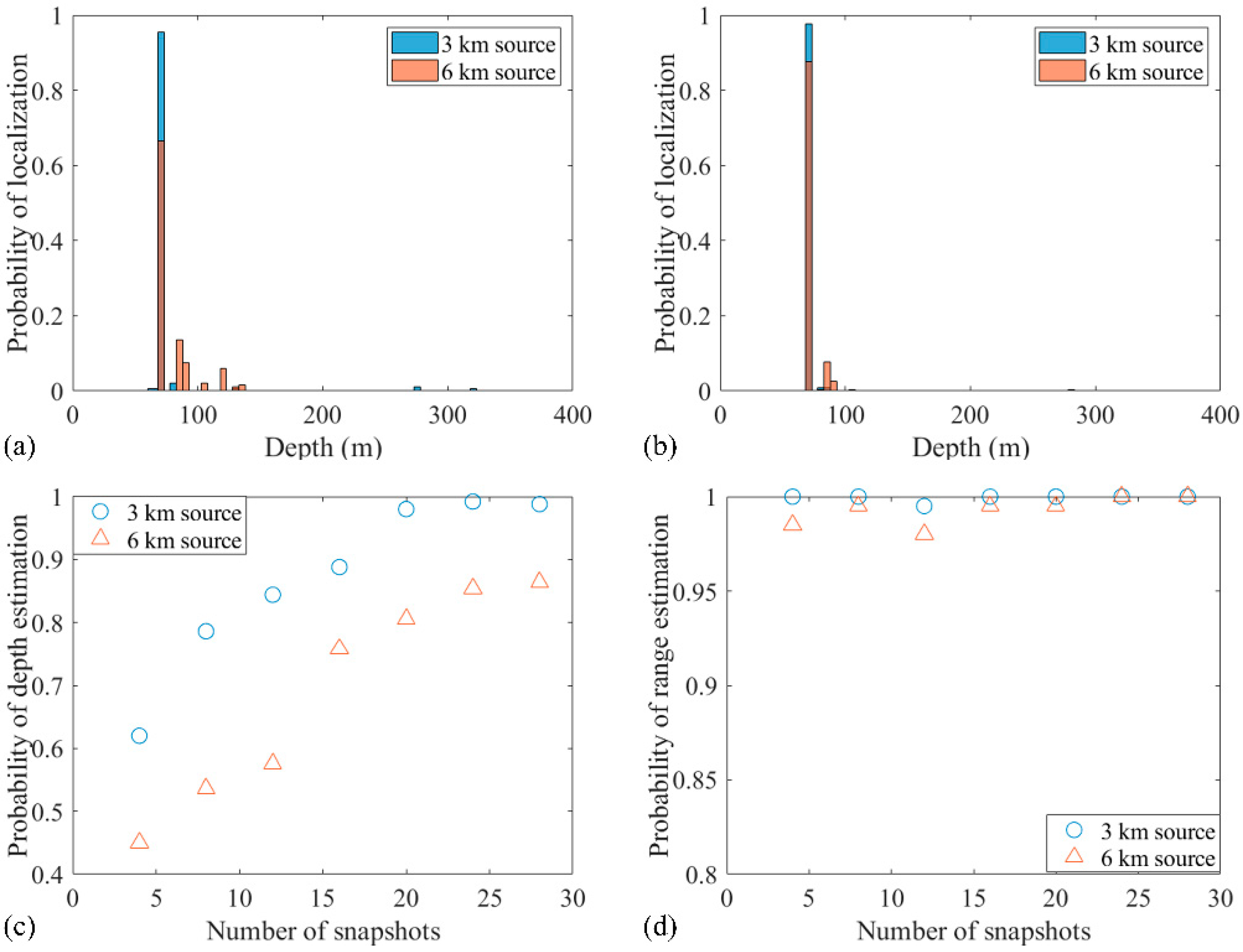
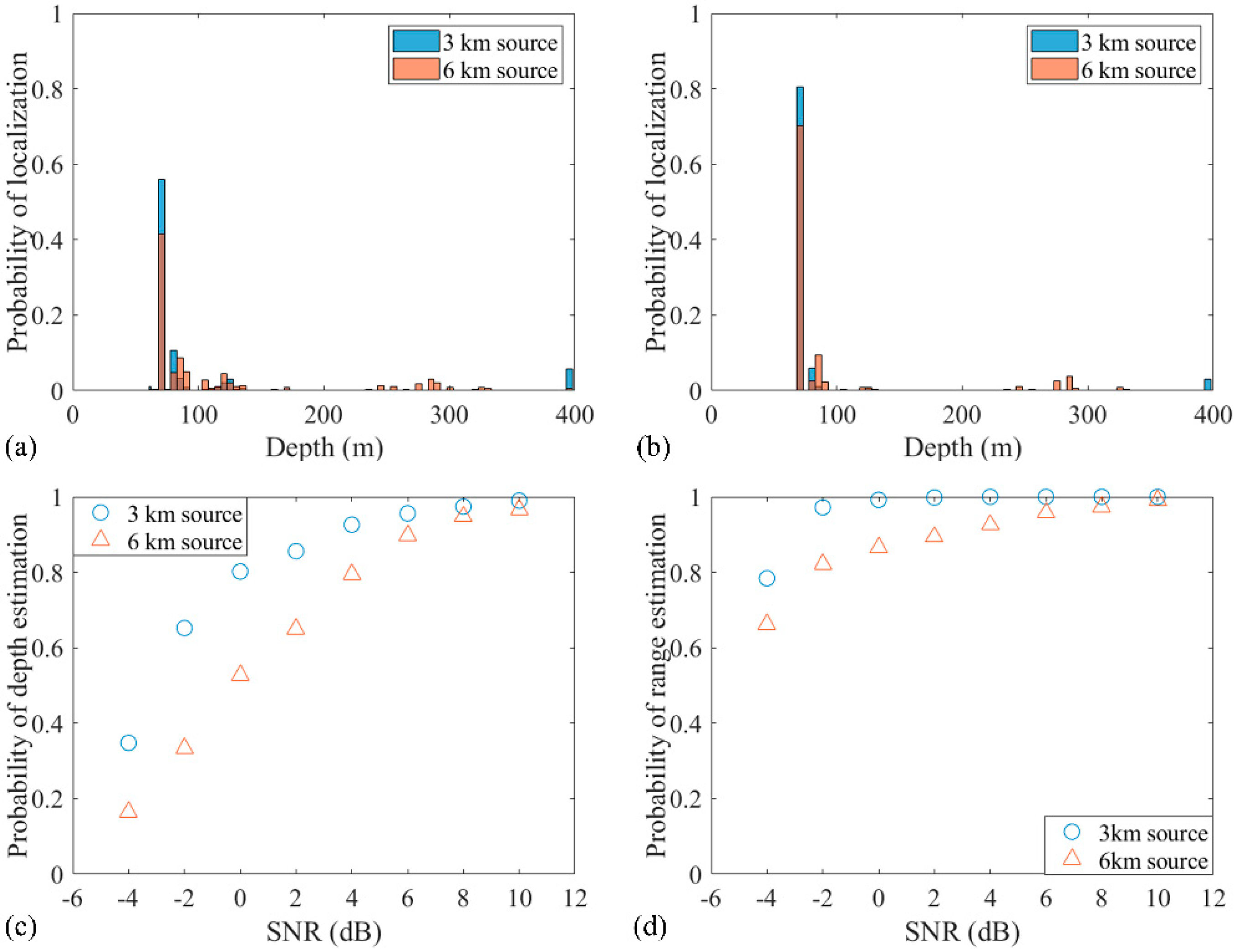
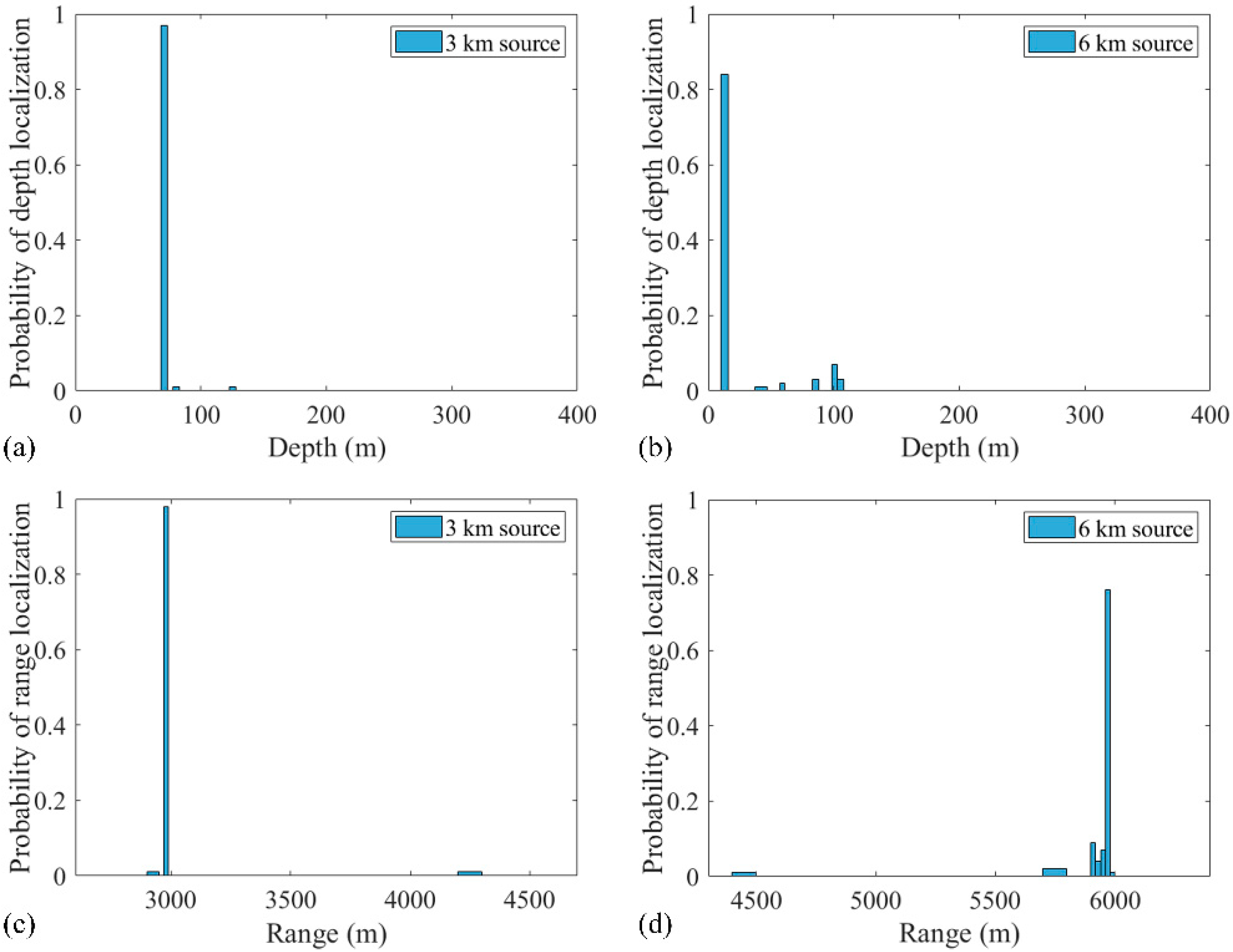
Also, the number of snapshots affected the localization performance. To determine this result, only the snapshot is changed while the SNR is 5 dB, the SSR is 5 dB, and the length of the 32 element VLA is 124 m. The source localization with 14 snapshots is shown in
Figure 7. The probabilities of accurate estimation of 3 and 6 km sources in 500 realizations were 95.8% and 69.8%, respectively. The probability distribution graphs of accurate localization for 3 and 6 km sources with 14 and 28 snapshots are shown in
Figure 8a,b, respectively. Also, the probability of accurate depth estimation increases with an increase in the number of snapshots, as shown in
Figure 8c. The individual depth estimation error for each source is represented. It is demonstrated from the result that the depth error of further sources is larger than that of closer sources for any number of snapshots. Further, the probability of accurate range estimation versus the number of snapshots is also demonstrated in
Figure 8d. Compared with the probability of depth estimation, the estimated ranges for sources at 3 and 6 km were very accurate. The result also indicates that more snapshots result in more accurate localization.
The localization performance versus SNR is shown in
Figure 9. The SNR is changed with the increment of noise power whereas SSR is maintained at 5 dB. The probability distribution graphs of accurate localization for 3 and 6 km sources with −2 and 2 dB SNRs are shown in
Figure 9a,b, respectively. It is clear that the probability of localization for the 3 and 6 km sources increases with the increase of the SNR to 2 dB. Also, the probabilities of depth and range estimations increase with higher SNRs, as shown in
Figure 9c,d. Still, the range estimation of the RAMPMF method is more robust than the depth estimation when the SNR changes from −4 dB to 10 dB. Similar to the analysis for the snapshots, the RAMPMF method was found to perform better with respect to a higher SNR.
The effect of SSP on the performance was also examined. Another SSP was chosen for computing the replicas, as shown in
Figure 10a. The parameters, such as source positions, SNR, and SSR, were the same as them in the
Figure 3. The positions of two sources estimated by RAMPMF method using the measured SSP are (2980 m, 70 m) and (5960 m, 70 m) in one realization in
Figure 10b. The positions of two sources estimated by RAMPMF method using the mismatched SSP are (3020 m, 73 m) and (6040 m, 64 m) in the same realization in
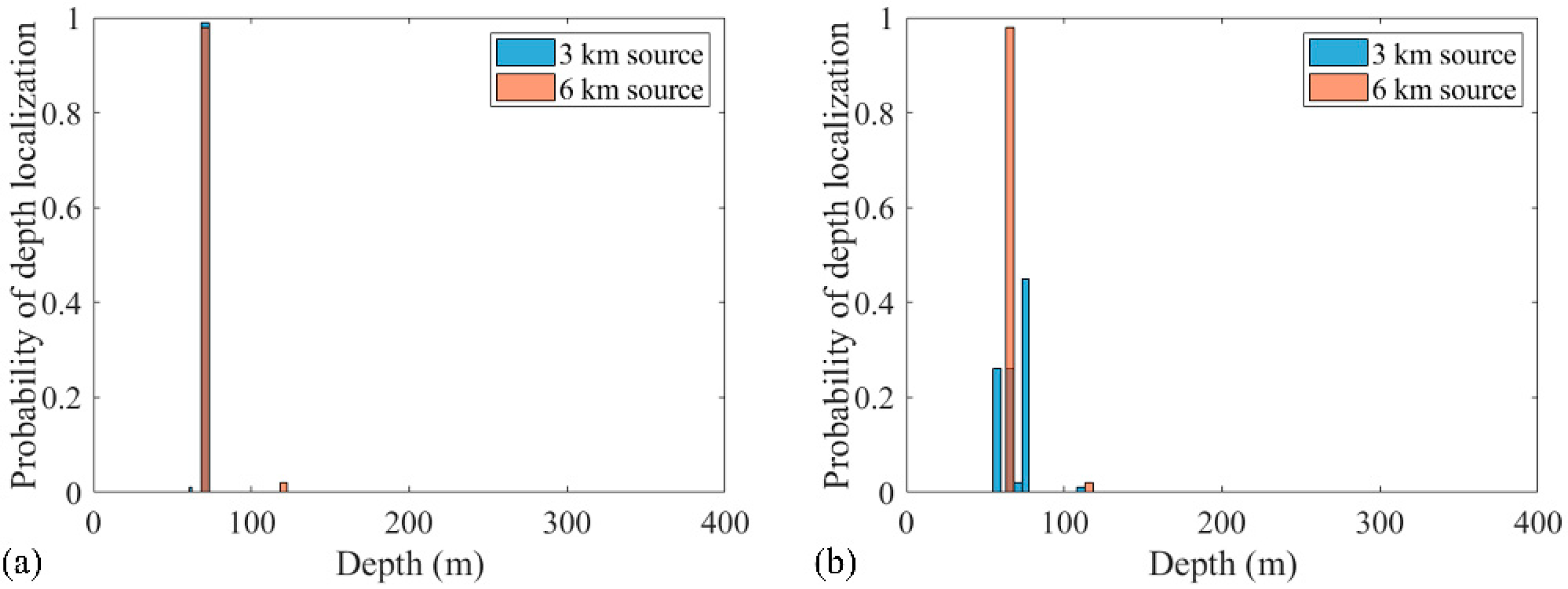
Figure 10c. Additionally, 500 Monte Carto realizations were conducted using the mismatched SSP, the probability of the accurate estimation of two source positions was found to be 73%, less than the probability of 93.4% using the measured SSP. However, the distributions of the depths of two sources are shown in
Figure 11. The result showed that most of the estimated depths were changed from 70 to 64 m or 73 m for 3 km and 6 km sources. The performance influenced by the mismatched SSP is not as much as it is affected by SNR. The reason is that main energy received in the VLA is contributed by the direct arrivals and surface-reflected arrivals, where the grazing angle from sources are large. This phenomenon is similar to the seasonal effects of SSP on reliable acoustic path and bottom bounce in the deep ocean [
30].
In addition, the distance between two sources at a depth of 70 m also has influence on the performance of the RAMPMF method. The distances were chosen between 1 km, 1.5 km, and 2 km. The corresponding localization results were shown in
Figure 12. It could be indicated from
Figure 12a−c that the source positions could be estimated when the distance is greater than 1 km.
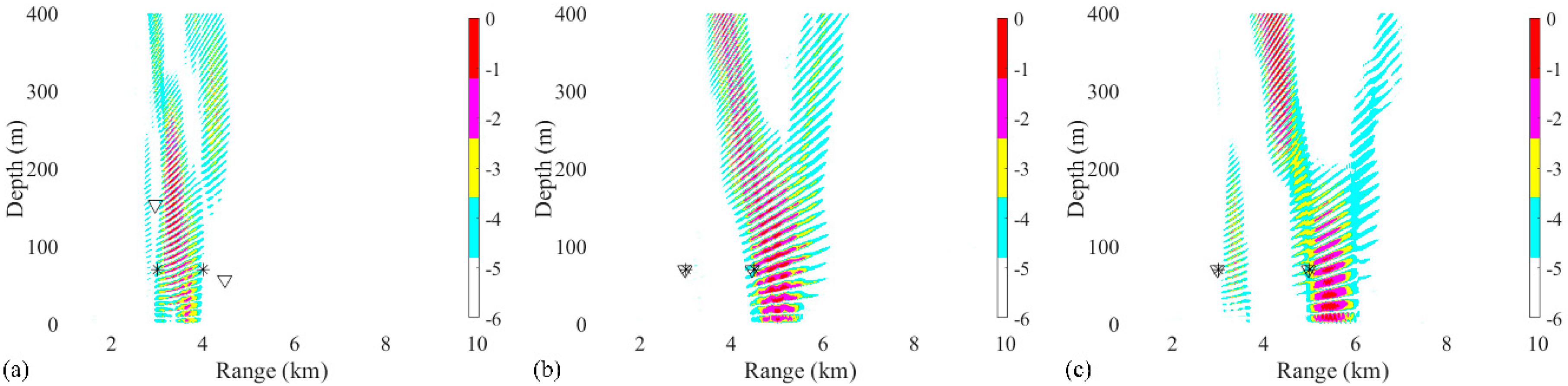
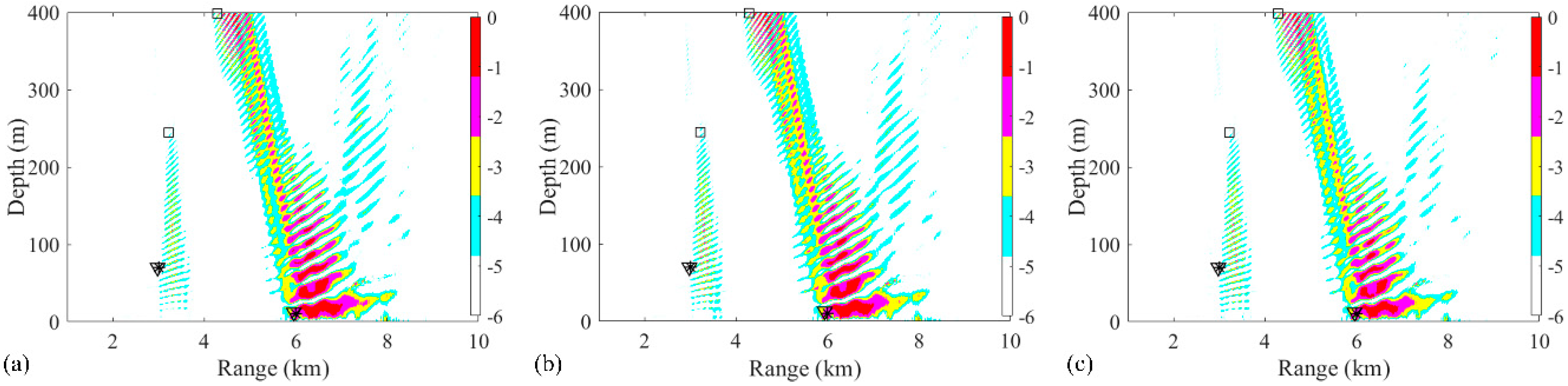
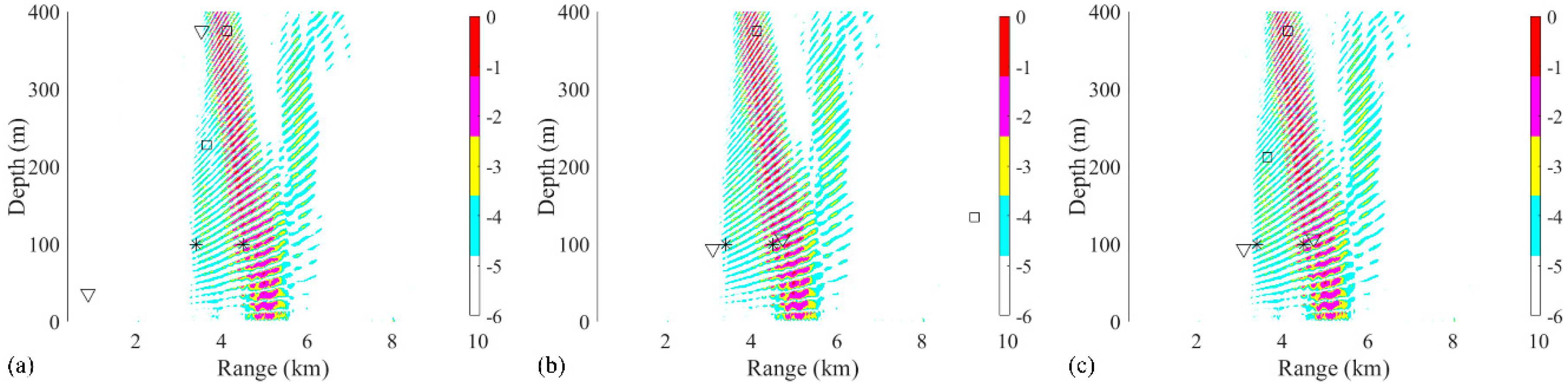
The same processing was applied in the same environment, except that the source positions were (3 km, 70 m) and (6 km, 10 m). The localization performances of processors within three realizations are presented in
Figure 13. Obviously, the RAMPMF performs best. The solutions resulting from pseudo peaks were eliminated by utilizing the spatial filter recurrently. Also, 500 realizations for this scenario were applied with the RAMPMF method. The probability of accurate localizations for sources (3 km, 70 m) and (6 km, 10 m) were found to be 96% and 79.6%.
Figure 14 presents the distribution graphs of the estimated depths for two sources. Compared to the localization of sources (3 km, 70 m) and (6 km, 70 m), the estimation probability of the 6 km source decreases because the strong interferences caused by a shallower source can appear in the deep region, as shown in
Figure 13, thus affecting the localization performance.
3.2. Experimental Data
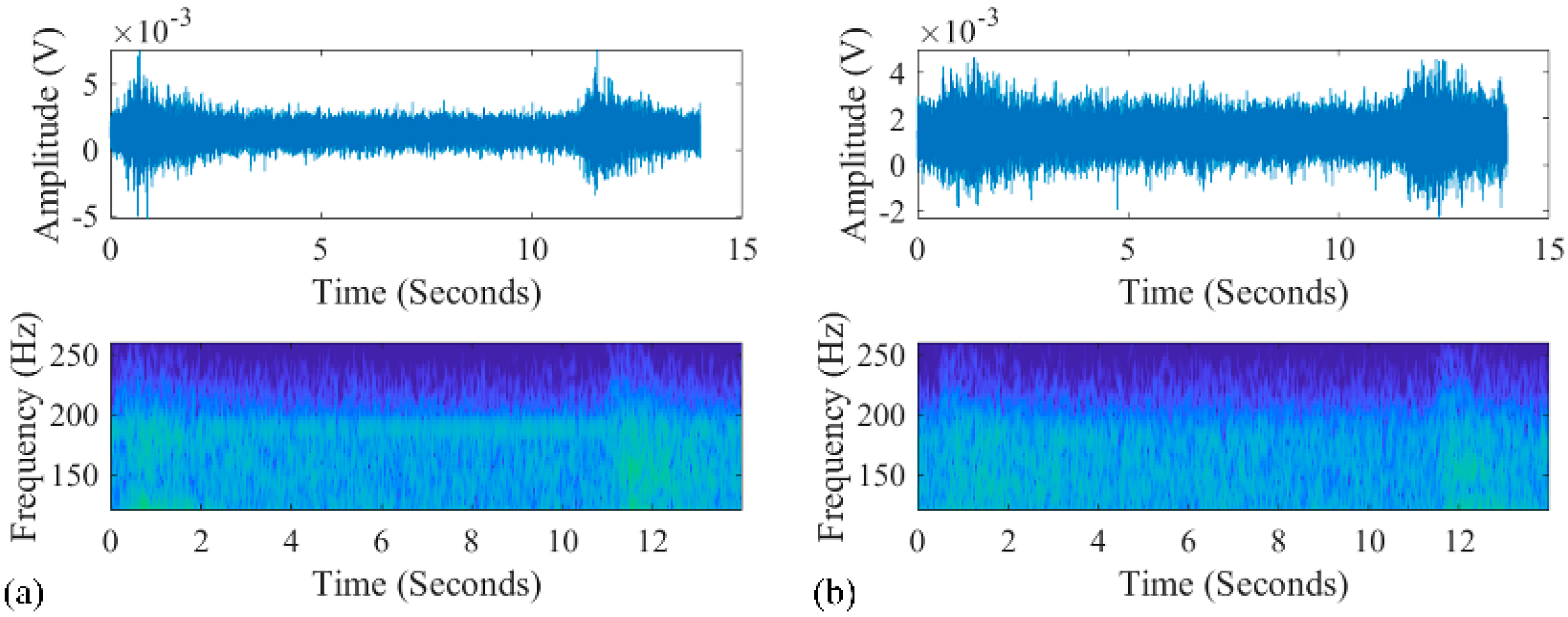
The experimental data were sampled with a 32 element VLA with a sample rate of 4 kHz and a sensitivity of −180 dB re 1 V/µPa. Each hydrophone was treated as a Data acquisition channel of a quad, 24-bit, delta-sigma analog-to-digital converter. The data was saved to a 256 GB secure digital card. And this hydrophone was rated for operation from 5 Hz to 20 kHz. The hydrophones were deployed from 1735 to 1859 m with a 4 m interval. A source at frequency 187 Hz was towed by the research ship. The bathymetry of this region was approximated to be flat at a depth of 2000 m. The towed source was at depth of 100 m, and the corresponding Global Position System (GPS) positions were recorded. Two signals, which were transmitted from the towed source at different ranges (3.4 and 4.5 km) from the VLA, were chosen to demonstrate the performance of the RAMPMF method, as shown in
Figure 15a,b. The unknown broadband interference source can be clearly observed. Therefore, the signals between 4 and 10 s (6 s in length) were used for processing. The received signals at one hydrophone are shown in
Figure 15a,b. And the noise was chosen at the time intervals without the signals transmitted from the towed source. The corresponding SNRs were 6 and 0 dB, respectively. A Fast Fourier Transform (FFT) length of 4096 samples with 50% overlap generated 11 snapshots, resulting in time windows with a length of 2 s and a frequency resolution of approximately 0.5 Hz. The Kaiser window with
was applied to each snapshot. These signals were combined artificially for demonstrating the performance of three methods.
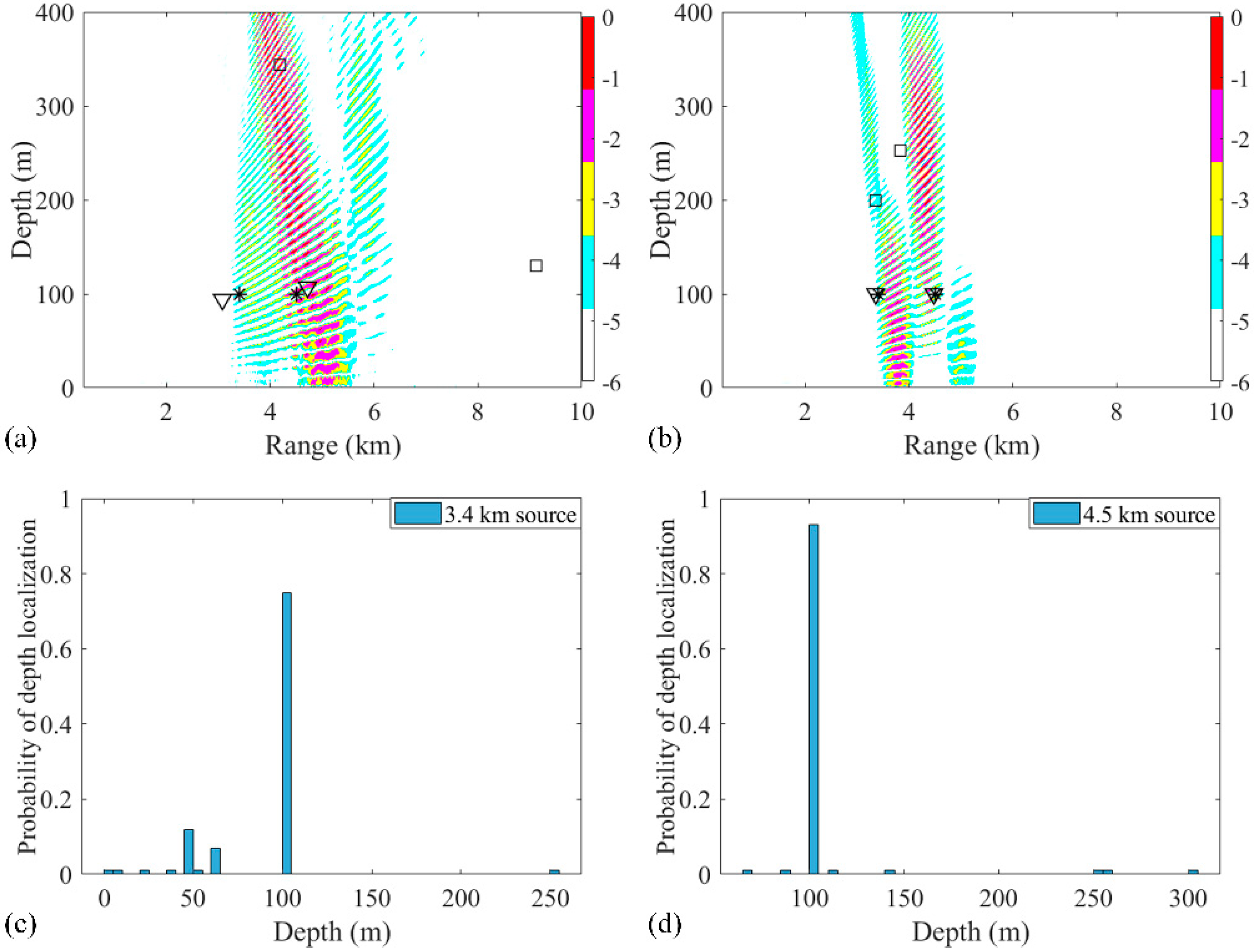
The source localization results by three different processors using the experimental data are shown in
Figure 16a. Simulation of this scenario was also carried out. The positions estimated by RAMPMF were (3.08 km, 94 m) and (4.72 km, 107 m), respectively. As can be seen from
Figure 16a,b, the RAMPMF method performs best in this scenario. The range and depth relative errors of the two sources were (9.4%, 6%) and (4.9%, 7%), respectively. The localization result and depth distribution in 500 realizations are shown in
Figure 16b,c, respectively. The RAMPMF method was found to display fewer ambiguous peaks than the other two processors, similar to the localization results. It is shown that the probability obtaining an accurately estimated source depth at a range of 4.5 km is higher than that at range of 3.4 km in
Figure 16c. Moreover, it is indicated that the localization error decreases for the further source in both the experimental and simulated results when the sources were at depth of 100 m. This behavior is not consistent with the results of the sources at an isothermal depth (< 80 m). Possible reasons for this may be the uncertainty of environmental parameters, and the strong interference of two close sources.
Then, the effects of factors such as the array aperture, number of receivers, and number of snapshots on the localization with experimental data were also examined. First, the array aperture was chosen between 94, 100. and 112 m, and the localization results were shown in
Figure 17. Similar to the results shown in
Figure 17, the estimated source positions were close to the true source positions, when the aperture is larger than 100 m. Also, the number of snapshots was chosen between 6, 8 and 10 to estimate two sources positions, as shown in
Figure 18. When the number of snapshots is more than 8, the localization results is as good as it using 11 snapshots. Finally, the hydrophone spacing was changed to 8 m, and the ambiguity surfaces is shown in
Figure 19. It could be seen that the results were all far from the true sources. In summary, the effects influenced by the factors are consistent with them in the simulation.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}