1. Introduction
The rapidly-growing human population has increased food demands for human survival on the Earth. Meeting the food requirements with limited resources of the planet is a big challenge [
1]. Several state-of-the-art technologies are being incorporated in the agriculture domain to enhance the productivity to cope with this challenge. Precision Agriculture (PA) is comprised of near and remote sensing techniques using IoT sensors, which help to monitor crop states at multiple growth levels. PA involves the acquisition and processing of a large amount of data related to crop health. Multiple parameters are involved in plants health, including water level, temperature and others. PA enables a farmer to know precisely what parameters are needed for healthy crop, where these parameters are needed and in what amount at a particular instance of time. This requires collecting massive information from different sources and different parts of the field such as soil nutrients, the presence of pests and weeds, chlorophyll content in plants and some weather conditions. All collected information needs to be analysed to produce agronomic recommendations. For instance, given the developmental stage of plants, their level of greenness (chlorophyll content) reveals the nutrients needed. This information is combined with the characteristics of the soil where the plant is located along with weather forecast. All collected information is further used to determine how much of a certain fertilizer should be applied to that plant on the next day. The delivery of agronomic information on the right time to farmer and ensuring that he/she applies these recommendations are key to enhancing the yields.
The foremost driver of PA is a WSN, which is a network of multiple wireless nodes connected together to monitor the physical parameters of environment. Each wireless node is comprised of a radio transceiver, a micro-controller, sensor(s), an antenna, along with other circuitry that enables it to communicate with some gateway to transmit information collected by the sensor(s) [
2]. Sensors measure the physical parameters and send the collected information to the controller, which further transmits this information to the cloud or a portable device. The agriculture sector has multiple requirements comprised of soil statistics, crops’ nature, weather conditions, fertilizer types and water requirements. Crops have diverse requirements depending on different crops on the same land and the same plant on different lands with different weather conditions. Sensors monitor the varying behaviour of these crop parameters. Due to rapid advancement in WSN technologies, the size and the cost of sensors have reduced, which make it feasible to implement them in many sectors of life including agriculture. The most common sensors used in the agriculture domain that capture environmental parameters related to crops [
3] are listed in
Table 1.
In general, a WSN consists of one or more wireless nodes that are further connected with sensors. These nodes are tiny devices that are responsible for collecting data. Nodes are divided into two types, a source node that collects the data, and the other is sink or gateway node, which receives data from the source nodes. A sink node has more computational power compared to a source node. However, there are energy, memory, power, size, data rate and price constraints when choosing wireless nodes.
Table 2 shows a comparison of wireless nodes along with their common specifications [
3]. Among all wireless nodes presented in
Table 2, MICA2 is considered to be more suitable as compared to others because of its large number of expansion connectors, which makes it suitable to connect with several sensors.
Many applications using WSN have been proposed since the last decade to monitor crops’ health remotely. In [
4], a cyber-physical system was presented for monitoring of a potato crop. Cyber physical systems can be expressed as smart systems that are comprised of software, hardware and physical components, integrated together to sense the varying states of the real world. The proposed system consists of three layers: the first layer is the physical layer, in which all sensory data are collected; the second layer is the network layer in which data are transmitted to the cloud; the third layer is the decision layer in which the data are analysed and processed to make decisions according to the observations.
There are several challenges in IoT-based systems due to exponential increasing devices. As in a typical IoT network, every node transmits data to the remote cloud, which results in cloud congestion, and the main challenges underlying the IOT-based system are latency with minimum power requirements, better usage of bandwidth and intermittent Internet connectivity. Fog computing and edge computing are the state-of-the-art techniques to overcome these issues; which reduce the computational burden of cloud. The main goal of fog computing is to conserve energy and bandwidth, which helps to increase the quality of service to the end users. In [
5], an energy-efficient architecture of the Fog of Everything was presented, which was comprised of six layers. The first layer was an Internet Of Everything (IOE) layer, where things (could be fixed, mobile or nomadic) functioned under multiple spatially-distributed clusters. The second was a wireless access network that supported Thing to Fog (T2F) and Fog to Thing (F2T) communication over the wireless channel. In the third layer, the connected fog nodes behaved such as a virtualized cluster. There was an inter-fog backbone in the fourth layer, which was responsible for connectivity among fog nodes. The next layer was the virtualization layer, which provided each connected thing with the ability to augment its limited resource set, exploiting the computation capability at the virtual clone. In the last layer, there was an overlay inter-clone virtual network that empowered Peer to Peer (P2P) communication. Then, a protocol stack for FOE was presented, which was further tested by creating a small prototype named as V-FOE and simulated on the iFogsim toolkit. The results provided strong evidence for the effectiveness of the proposed framework and more energy efficiency with reduced failure rate and delay.
The energy efficiency is the most serious consideration while developing any fog architecture. In [
6], an energy-efficient protocol for a fog-supported wireless sensor network was presented, which maximized the lifetime of the network by uniformly distributing the energy among connected nodes. The performance of the proposed algorithm was compared with the existing state-of-the-art algorithms in MATLAB. The results showed that the proposed algorithm was highly energy efficient with a prolonged network lifetime.
Regardless of all the advancements in the IoT domain, the adoption of PA has been limited to some developed countries. Because of the lack of resources, remote sensing-based techniques to monitor crop health are not common in under-developed countries such as Pakistan, which results in a loss of yield. Pakistan is an agricultural country due to is large arable land and climatic variations, which make it suitable to cultivate multiple types of crops. Despite all these natural resources, Pakistan is still unable to produce massive yields [
7]. The main reason behind the low production is traditional farming practices, which are used for crop health monitoring and yield estimation. These techniques are completely based on farmer’s intuition and experience. Farmers visit the fields in order to monitor the crop, which is very laborious and quite challenging in the case of large arable land. In this case, the area under insect/pest attack is inaccurately measured, which can result in over spraying of insecticide and pesticide, which adversely affects the nutrition in crops.
Keeping in mind all these issues, our motivation is to provide the industry and research communities with a survey of technologies, metrics and current practices concerning communication devices, sensors and platforms used to monitor and analyse multiple sources of data (spectral images, IoT, etc.) used in environmental and agriculture applications. As the main contribution, we generated a technological taxonomy for PA, which was driven by an IoT-based architecture to monitor the crops’ health. The developed system had two modules including wireless sensor network-based crop heath monitoring in which multiple sensors were used to get the real-time heath status of crop; the other one was NDVI-based analysis of spectra images captured by a drone to assess the chlorophyll content, which was further used to monitor the health of the crop.
The rest of the paper is organized as follows:
Section 2 presents the most common wireless communication technologies used in the agriculture domain;
Section 3 explains the spectral image-based remote sensing techniques, platforms and vegetation indices;
Section 4 describes remote sensing applications in the agriculture sector;
Section 5 presents a case study on IoT-based and UAV-based PA;
Section 6 explains the experiments and results; challenges are discussed in
Section 7; and conclusions and future directions are presented in
Section 8.
5. A Case Study on UAV-Based and IoT-Based Precision Agriculture
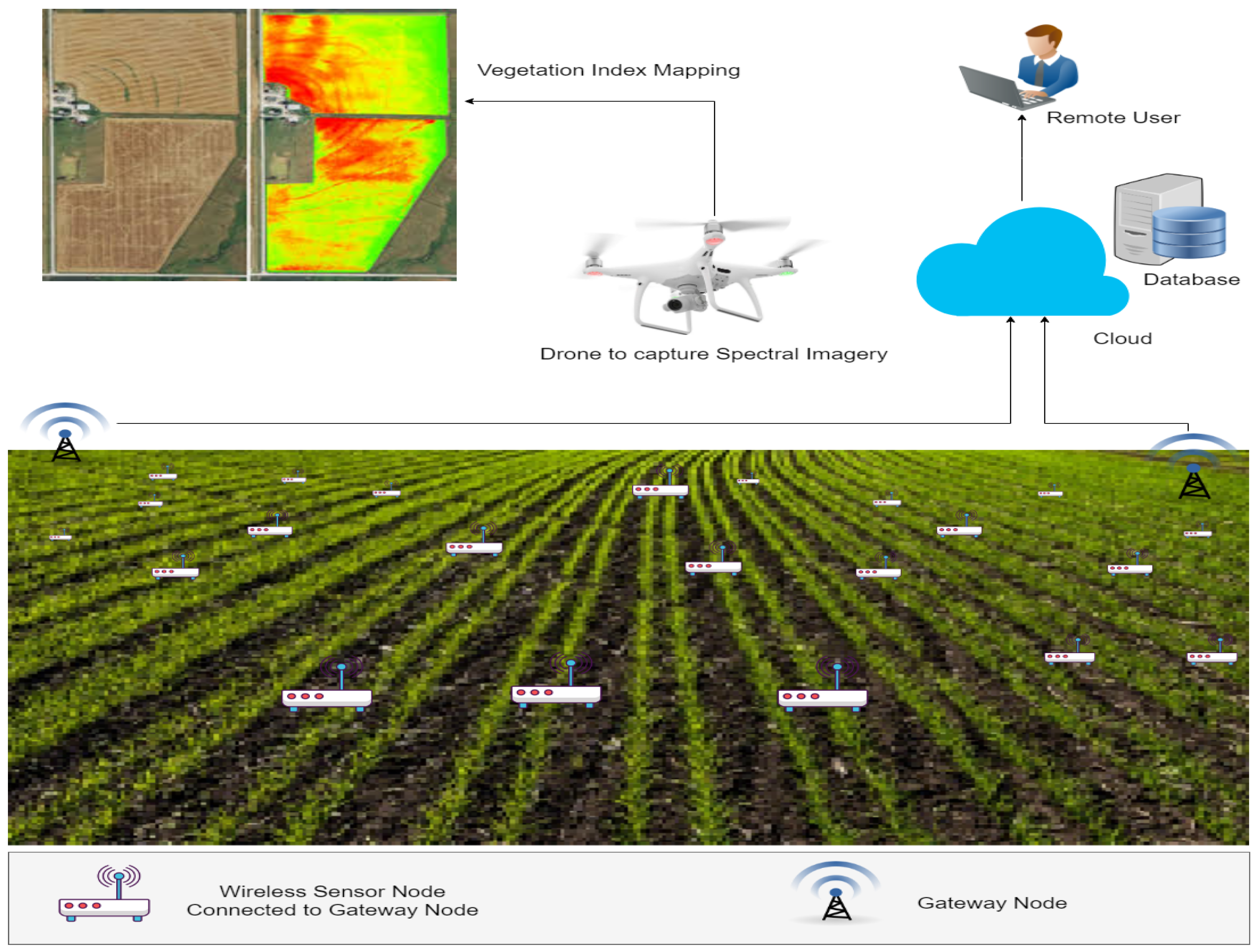
We developed a complete solution for crop health monitoring based on IoT and remote sensing. In the proposed system, crop health is monitored using data collected from multiple IoT sensors, as well as NDVI mapping of spectral images captured by a drone. The architecture of the proposed system is shown in
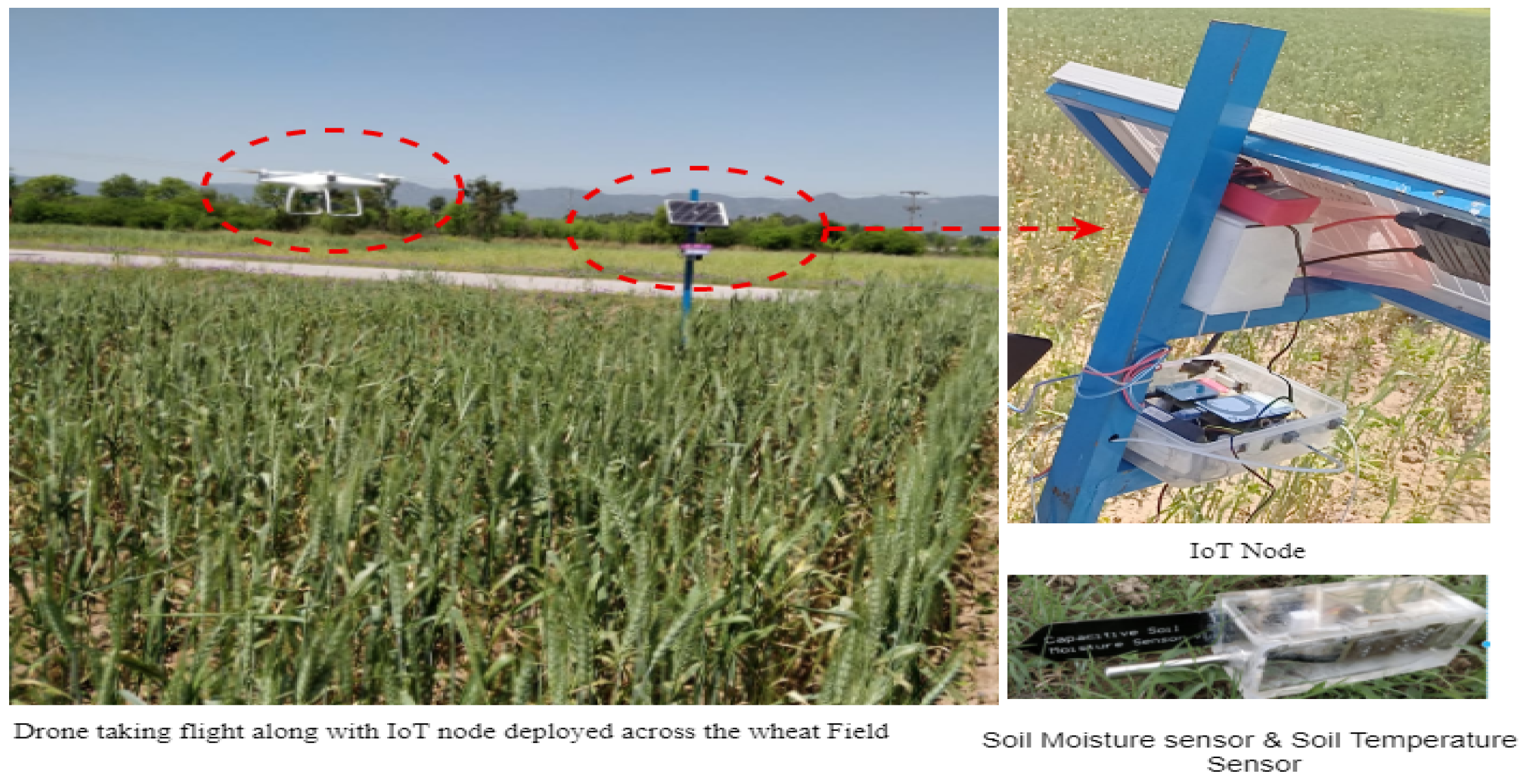
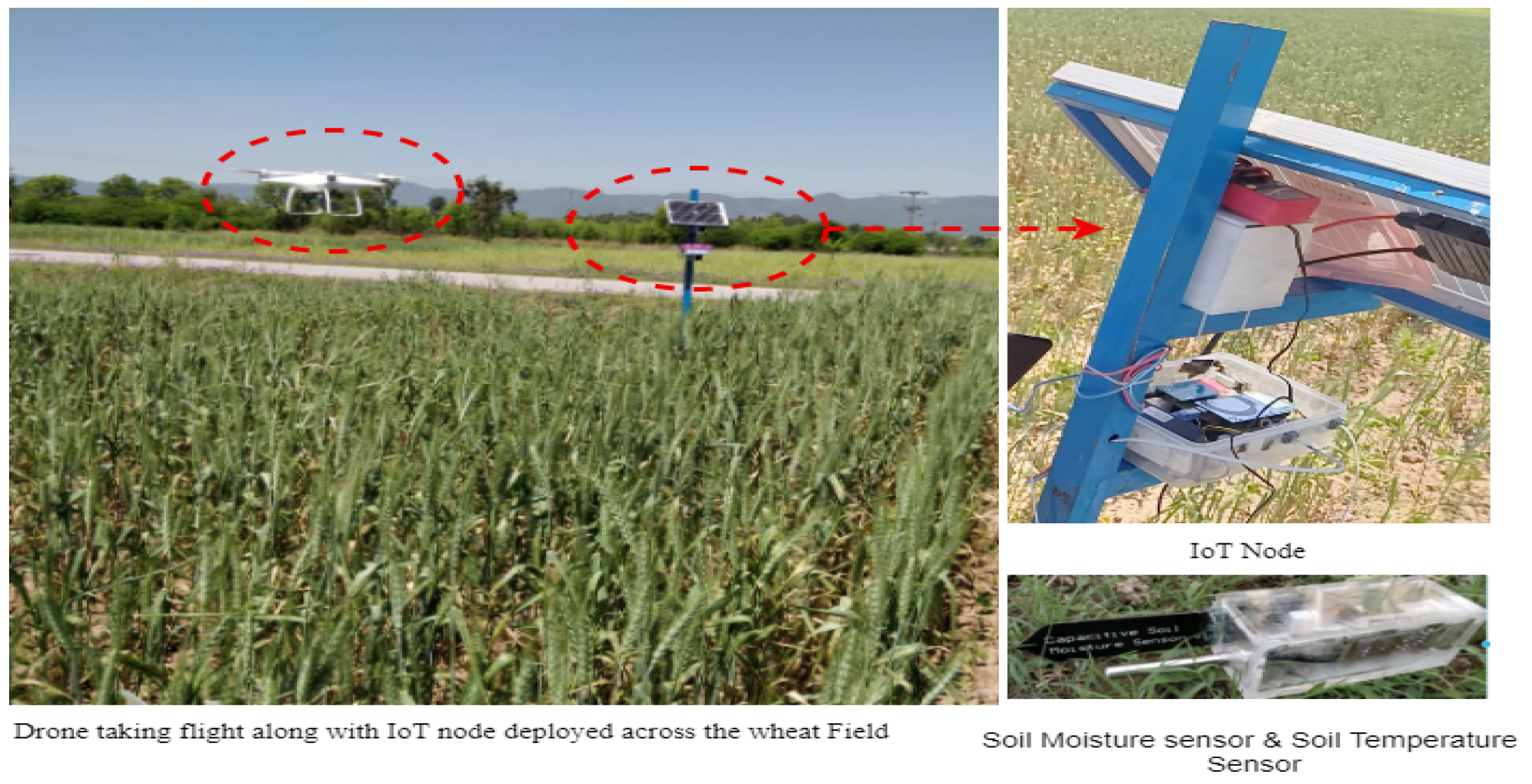
Figure 1, which was designed according to two main modules. The first module was a wireless sensor network-based system in which multiple wireless nodes were developed. Each wireless node was comprised of a soil moisture sensor used to monitor the water level of the soil, a soil temperature sensor used to check the temperature of the soil and air temperature and humidity sensors. These nodes were deployed across the field in a star topology fashion where the master node collected readings from all slave nodes and transmitted the captured reading to the back-end server for further processing. The master node acted as a gateway node, which received data from all slave nodes using NRF communication module. After performing initial processing, the master node transmitted the data to the cloud using GSM communication technology. In the case of the unavailability of the GSM network, this node stored the captured data and transmitted to the cloud upon the availability of network.
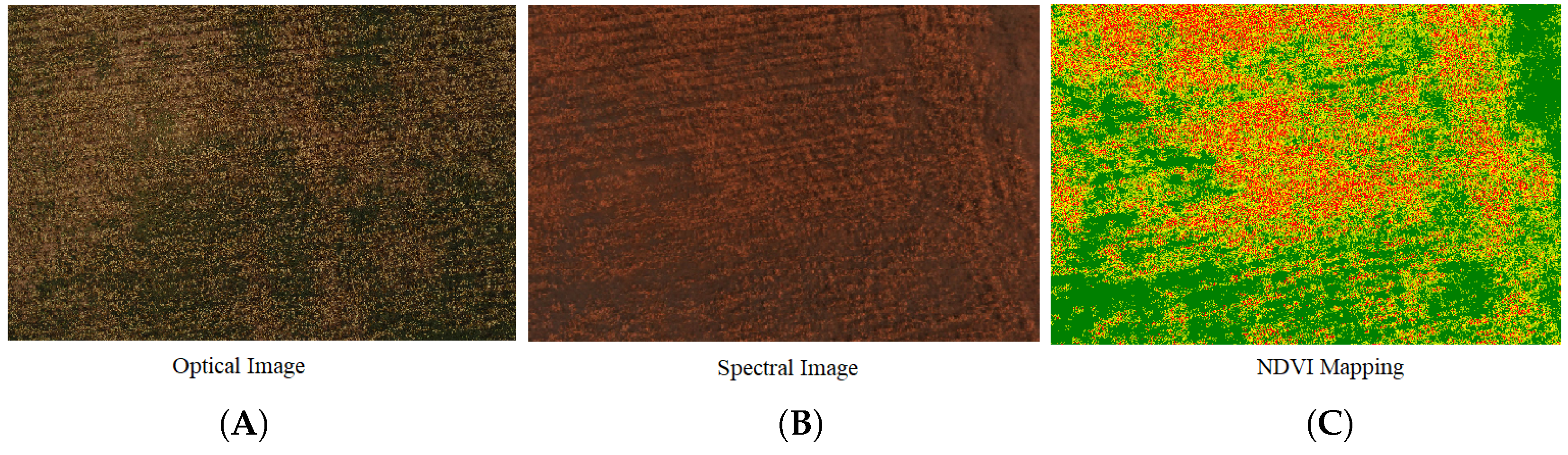
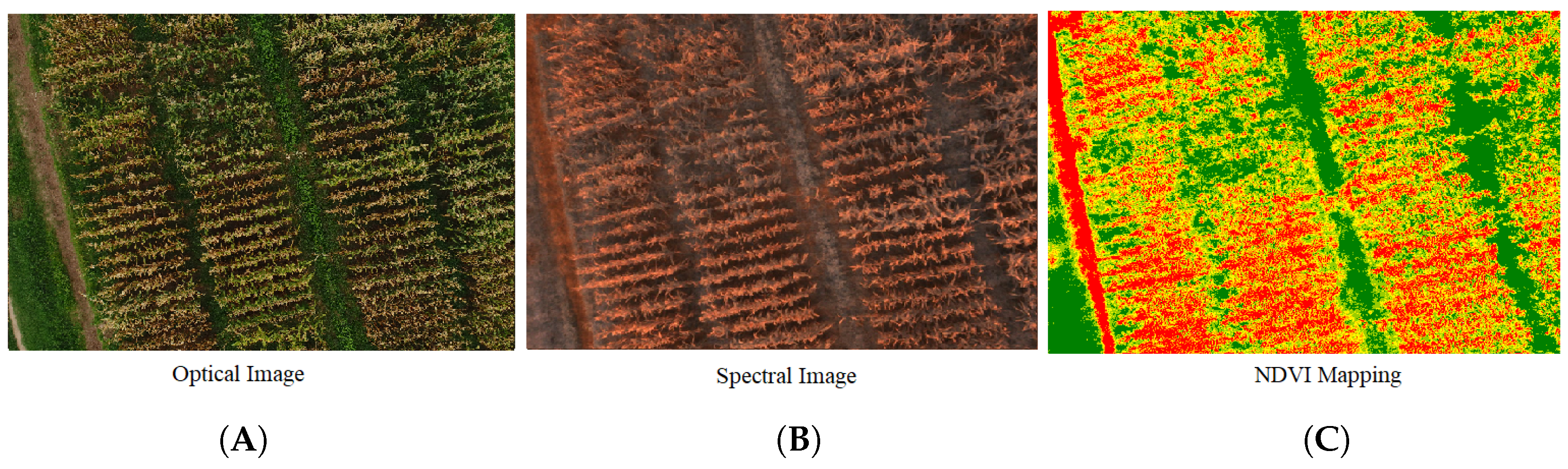
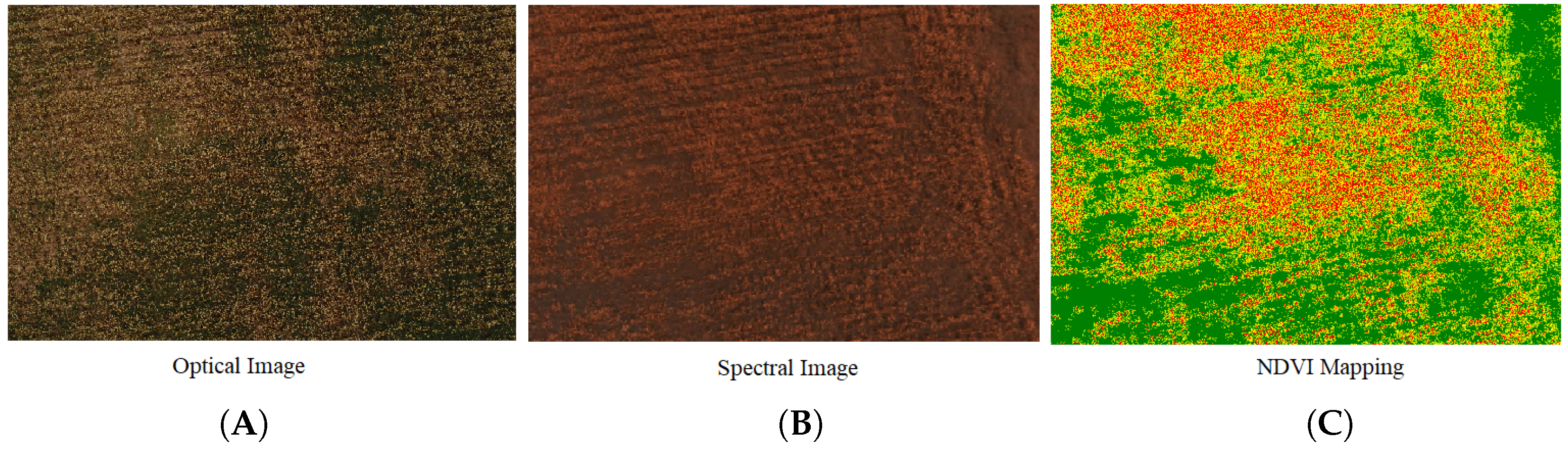
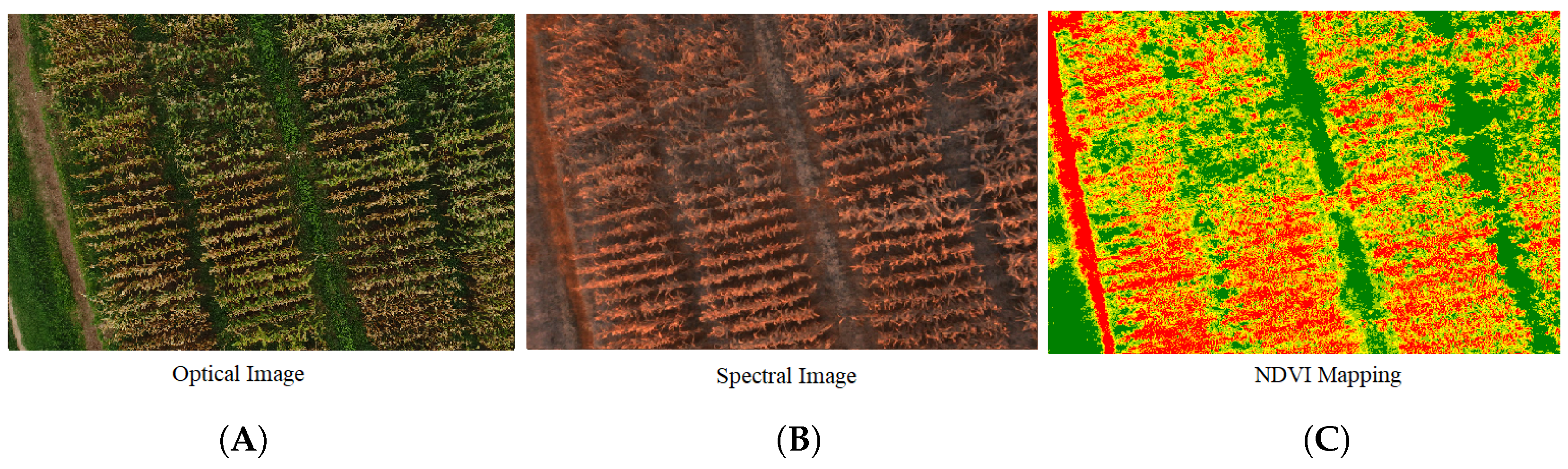
The second module was used to monitor crop health using multi-spectral imagery, which was collected by a multi-spectral camera mounted on a drone. The NDVI was computed using Equation (
1) to classify between healthy and unhealthy plants by measuring the chlorophyll content in the crops, which was further used to localize the area under stress precisely.
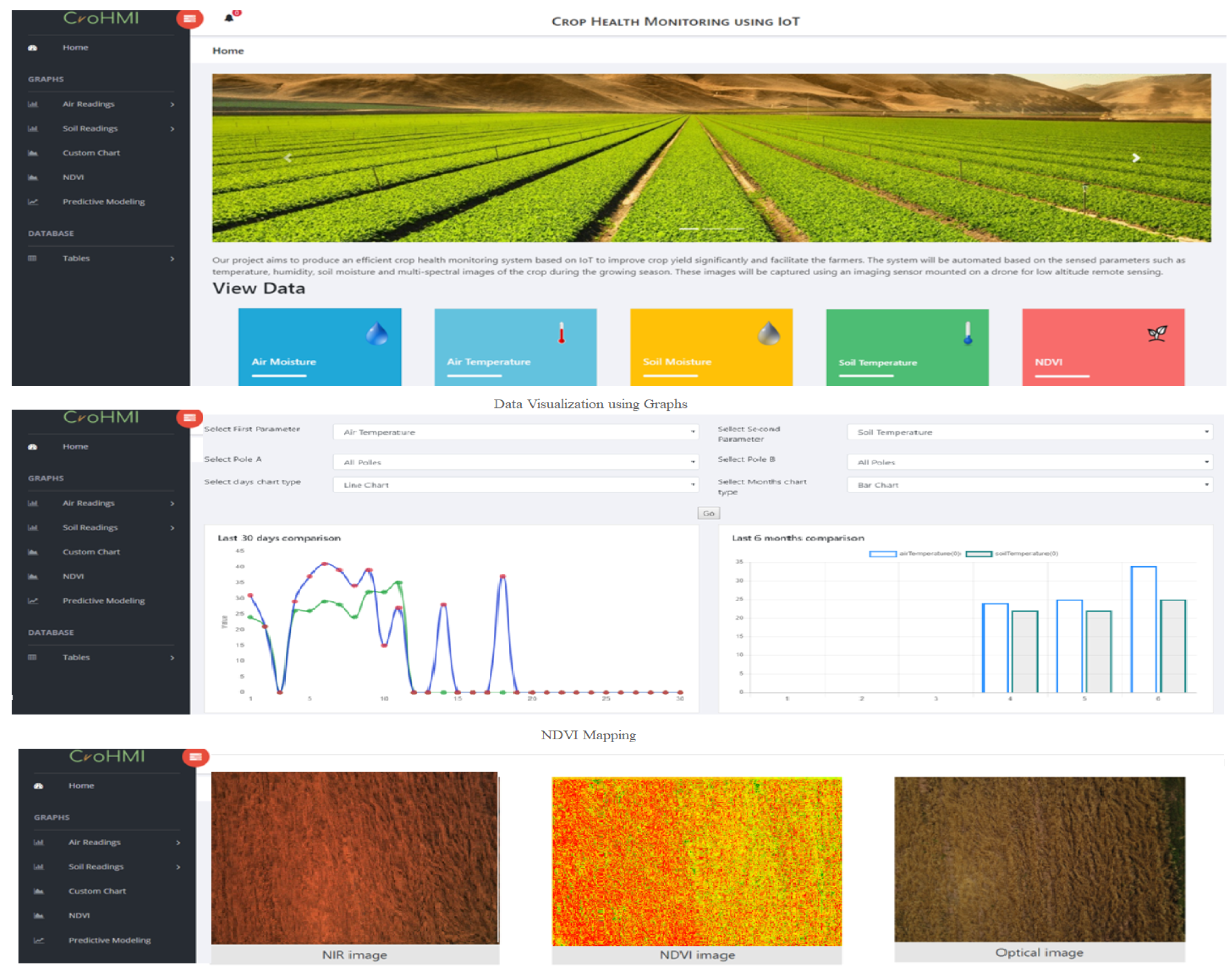
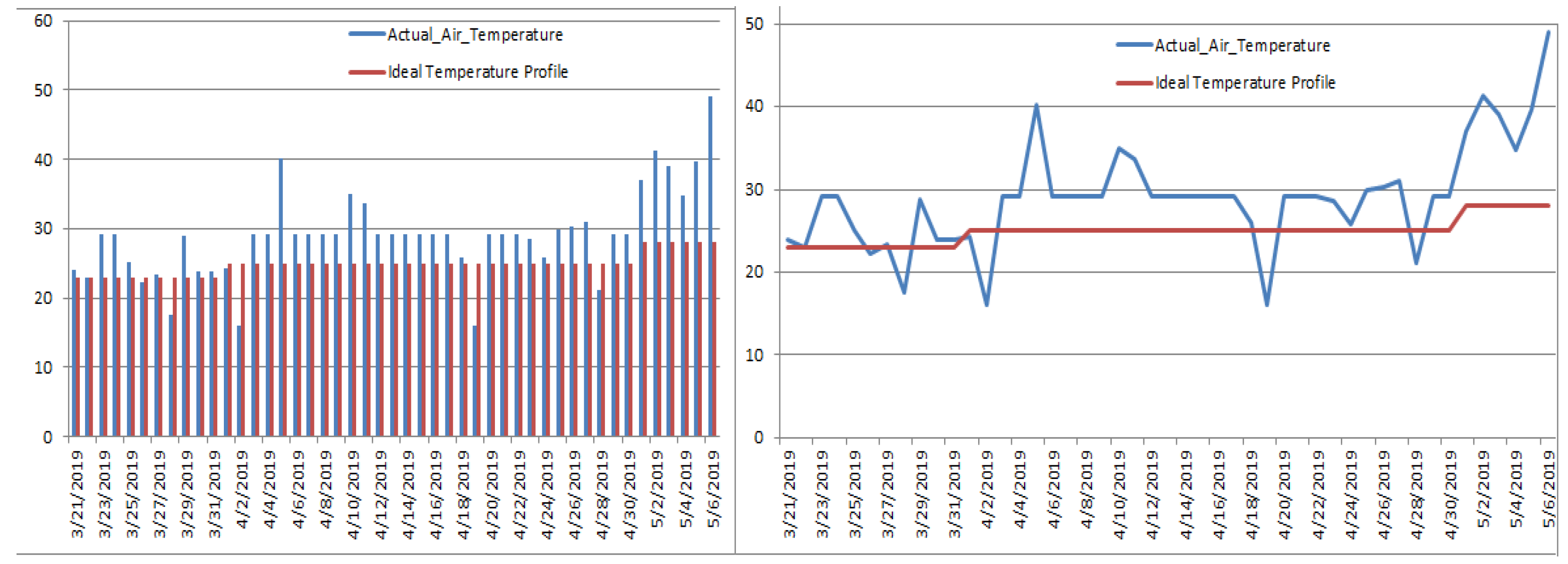
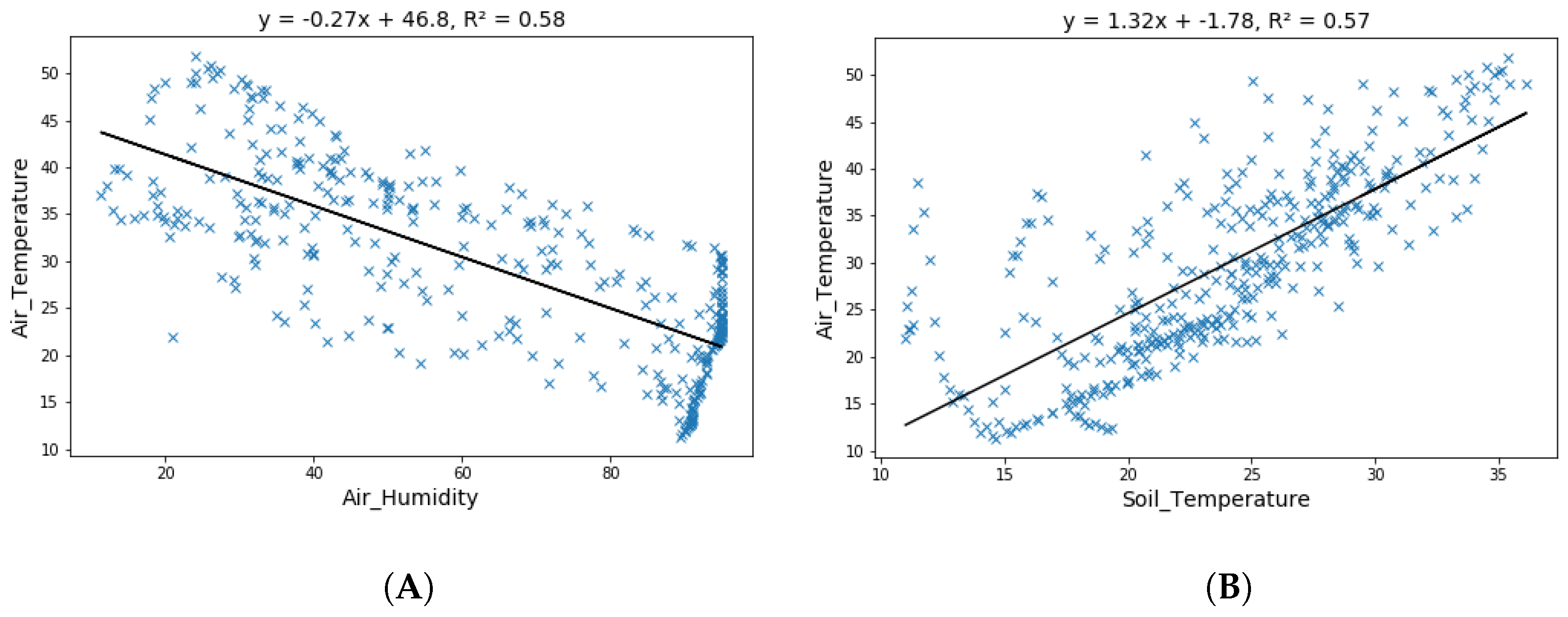
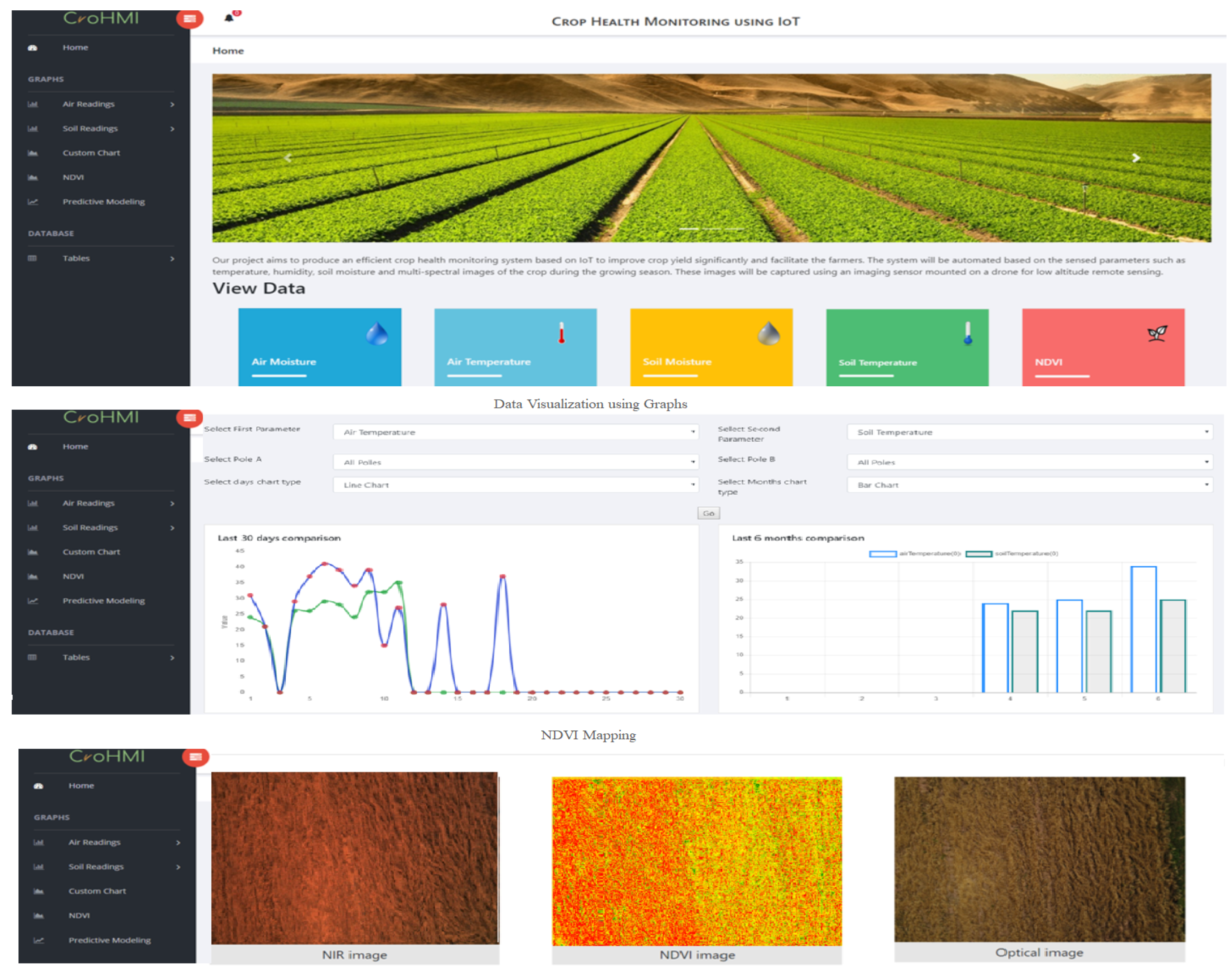
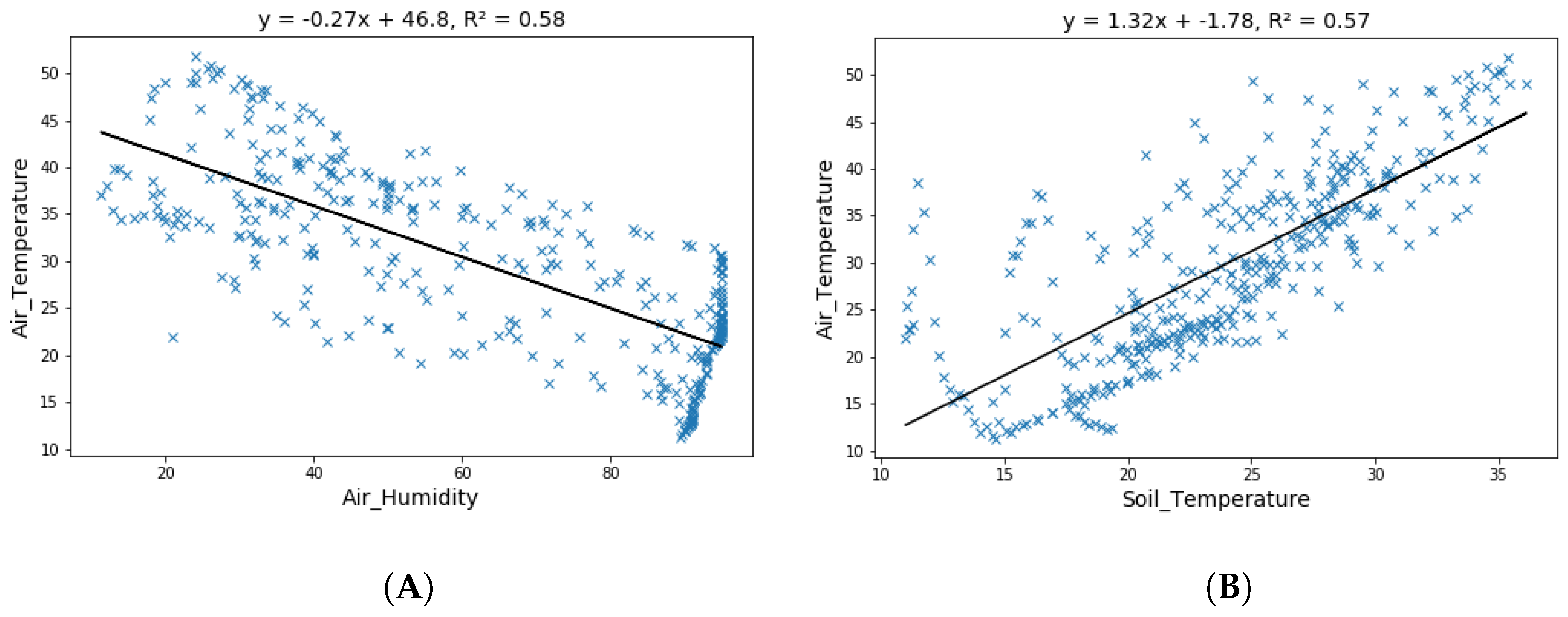
All collected data were sent to the cloud where further analysis was performed. The web portal was designed to help the farmer monitor the crop profile over the whole life cycle. Currently, we are monitoring soil moisture, soil temperature, air moisture and air temperature readings in real time along with NDVI mapping of spectral imagery. Multiple web services were provided on the web portal including historical/real data visualization using graphs, weather monitoring, NDVI mapping and the correlation among measured parameters.
Figure 2 shows the snapshots of the web portal along with different services.
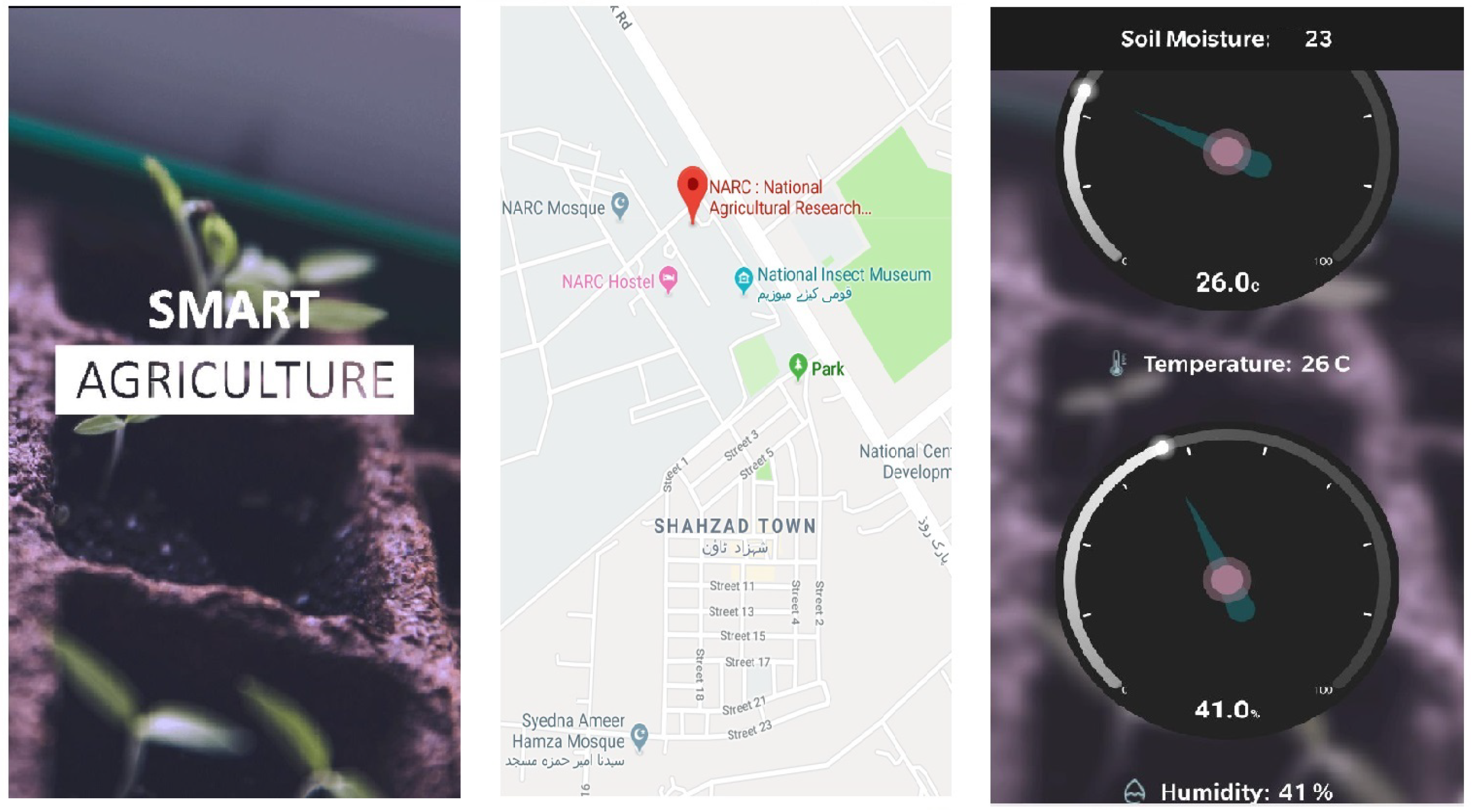
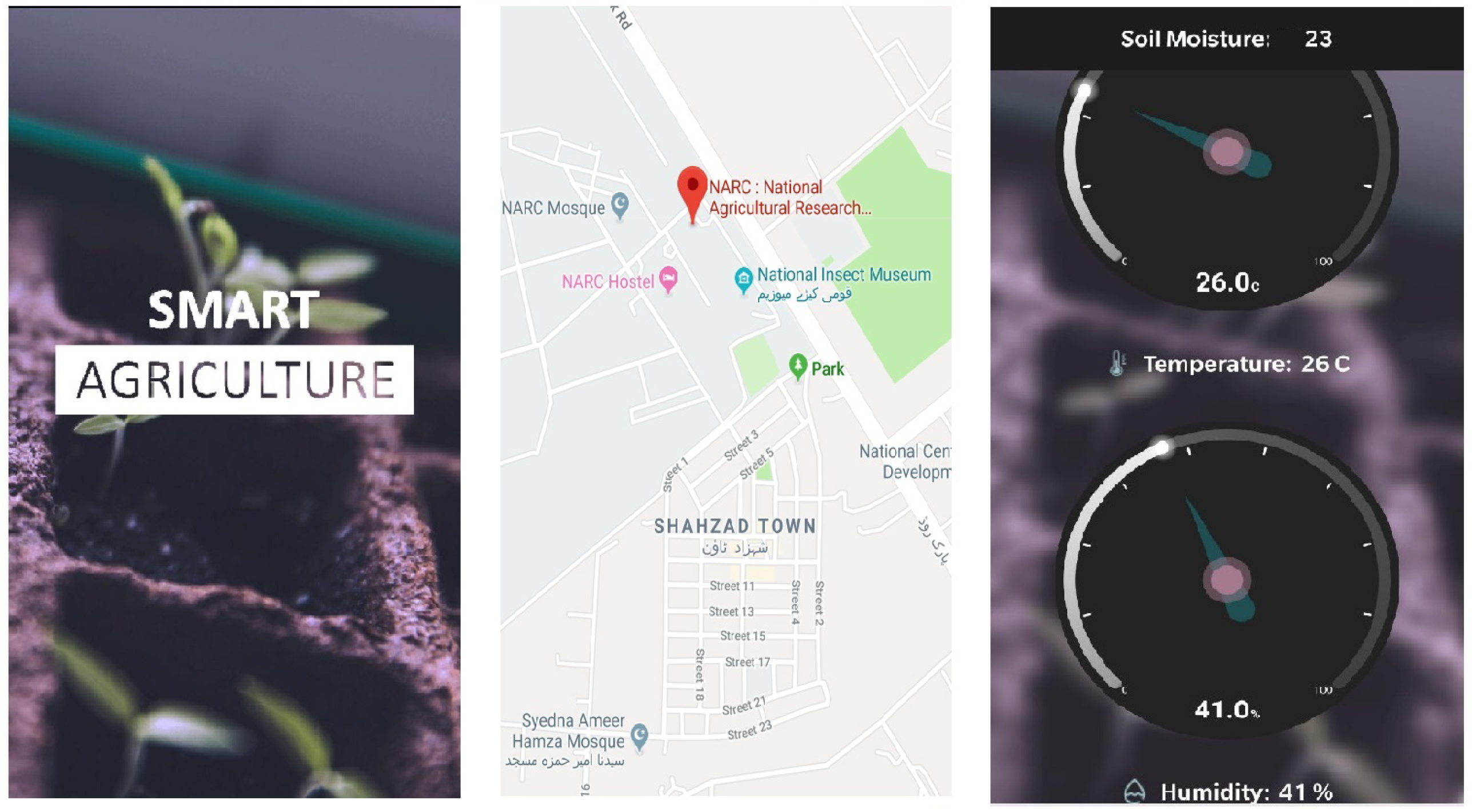
For portability and remote monitoring, a mobile application was also developed to facilitate the farmer/agronomist/landlord with all the web services that are available on web portal. The alerts are generated when an abnormal behaviour is observed in the crop, which help the farmer to take remedy actions in a timely manner. The user interfaces of the mobile application are shown in
Figure 3. Therefore, the web portal along with mobile applications provides a complete solution, which enables agricultural users monitor the current status of the crop, as well as previous details.
7. Challenges
PA has been used since the last few decades to enhance crops’ yield with reduced costs and human effort, although the adoption of these novel techniques by farmers is still very limited owing to the following reasons or challenges.
7.1. Hardware Cost
PA relies mostly on hardware such as sensors, wireless nodes, drones, spectral imaging sensors, etc., which are used to assess multiple parameters in real time. These sensors have multiple limitations including high development, maintenance and deployment cost. Some systems in PA are cost effective and are suitable for small arable land, i.e., smart irrigation systems that require low-cost hardware components and sensors. However, drone-based systems for crops’ health monitoring are feasible for large arable land due to high installation cost.
7.2. Weather Variations
Environmental variation is one of the major challenges that affects the accuracy of data collected by sensors. Sensor nodes deployed in the field are sensitive to environmental variations, i.e., rain, fluctuation in temperature, wind speed, sun light, etc. Communication between wireless nodes and the cloud can be interrupted due interference induced in wireless communication channels by atmospheric disturbance. The satellite, air borne and drone platforms are also sensitive to weather variations. Imagery acquired by these platforms is affected by contamination of clouds and other natural aerosols. The development of advanced techniques for atmospheric correction, cloud detection and noise interpolation is a current open challenge, which requires hard efforts from the research community.
7.3. Data Management
The sensors in PA constantly generate data. To ensure the integrity of data, some data security measures needs to be in place, which will in turn enhance the cost of the system. The readings from the sensors have to be accurate in order to take appropriate actions precisely when and where required. An intruder can corrupt the readings, and false readings will adversely reduce the effectiveness of the system. PA systems generate immense amounts of data, which require enough resources to perform data analysis. Real-time data collected from sensors deployed across the fields after a few minutes and spectral imagery acquired from high-altitude or low-altitude platforms produce the bulk of the data, which increase the storage and processing requirements. New software platforms and facilities for scalable management of Big Data sources are demanded. In this regard, the generation of software-as-a-service solutions is focused on merging data management and IoT thorough cloud computing platforms.
7.4. Literacy Rate
Literacy is an important factor that influences the adoption ratio in PA. In developing countries where the illiteracy rate is high, farmers grow crops based on their experience. They do not utilize the state-of-the-art technologies in agriculture, which results in loss of production. Farmers need to be educated in order to understand the technology or they have to trust a third party for technical support. Therefore, in underdeveloped areas where the literacy rate is not high, PA is not very common due to the limitations of resources and education.
7.5. Connectivity
Next-generation 5G networks can be 100-times faster than 4G ones, making communication between devices and servers much quicker. 5G can also carry much more data than other networks, which makes it an ideal technology for transmitting information from remote sensors and drones, key tools that are being tested in PA environments. The adoption of new communication networks based on 5G is a must in current applications where secure and rapid data transfer enables real-time data management and support for decision making.
7.6. Interoperability
One of the biggest problems PA faces is the interoperability of equipment due to different digital standards. This lack of interoperability is not only obstructing the adoption of new IoT technologies and slowing down their growth, but it also inhibits the gain of production efficiency through smart agriculture applications. New methods and protocols to integrate different machine communication standards to unlock the potential of efficient machine-to-machine communication and data sharing between machines and management information systems are required in the current scenario of PA.
8. Conclusion and Future Directions
Precision agriculture is a modern practice used to enhance crops’ productivity using latest technologies, i.e., WSN, IoT, cloud computing, Artificial Intelligence (AI) and Machine Learning (ML). Most of the research done so far indicates that PA-based practices have a great influence on sustainability and productivity. The objective of PA is to provide decision support systems based on multiple parameters of crops, i.e., soil nutrients, water level of the soil, wind speed, intensity of sunlight, temperature, humidity, chlorophyll content, etc. However, several challenges are involved in the development and deployment phase of these systems. This article was aimed at providing a survey of modern technologies involving current PA platforms, with the goal of supporting industry and research communities on the development of modern applications for smart agriculture. A case study was presented to prove the effectiveness of the PA in the agriculture domain.
Since the main objective of precision agriculture is to produce surplus yield by optimizing the resources such as water, pesticides, fertilizers, etc., for resource optimization, prescription maps play an important role, which enables farmers to quantify resources required for healthy crops at any particular growth stage. Most of the research accomplished in the agriculture domain focuses on the remote sensing platforms to collect imagery, which reflects only Vegetation Indices (VIs) such as NDVI. The prescription maps cannot be generated by only using VIs; instead, multiple other factors need to be considered such as soil properties, soil moisture level, meteorological behaviour, etc.

 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}