1. Introduction
An optical frequency-domain reflectometry (OFDR)-based distributed sensing system was initially proposed by Froggatt et al. in 1998 and utilized in distributed disturbance measurements such as strain or temperature measurements because of its high spatial resolution and sensitivity [
1,
2,
3]. In an OFDR system, the interference signals are collected as a function of the optical frequency of a tunable laser source (TLS). A fast Fourier transformation (FFT) is then used to convert this optical frequency-domain information to a desired spatial information, where it is required that the interference signals are sampled at an equal interval of optical frequencies [
4]. However, any frequency tuning nonlinearity of a TLS gives rise to a non-uniform sampling interval of the optical frequency when the signal is sampled by an equal time interval, which in turn results in spreading of the reflection peak energy, deteriorating the spatial resolution [
4].
Two kinds of methods were developed in recent years to solve the problem of the laser tuning nonlinearity. The first involves utilizing an auxiliary interferometer to produce an external sampling clock as a data acquisition trigger [
5]. Although this method occurs real time and does not need post-processing, the maximum measurement length is limited by the time delay of the auxiliary interferometer in order to satisfy the Nyquist law [
6]. This limits the measurement range of the system. Some researches proposed in-phase quadrature detection (IQ), such as the 3 × 3 coupler [
7] or optical hybrid receiver [
8], which can double the detection length. However, in these schemes, a complex operation in the demodulation is introduced, which would decrease the real-time demodulation of the system.
The second method to correct the tuning nonlinearity is to perform post-signal processing after acquiring OFDR data. Normally, this technique involves acquiring an auxiliary interferometer signal along with the OFDR signal and extracting the TLS phase information from the auxiliary interferometer signal, compensating nonlinearity in the OFDR signal using a correction algorithm [
4]. One of the algorithms involves the resampling technique that resamples the main interference signals with an accurate equidistant optical frequency grid based on the optical frequency information of the TLS using interpolation algorithms. Badar et al. proposed a self-correction scheme in which only one detector is contained in the measurement system. In their proposed scheme, an intentional beating signal is introduced at the beginning of the OFDR spectrum, which is treated as an auxiliary interferometer to acquire tunable laser phase information for post-signal processing [
9]. However, two drawbacks exist in their scheme. One lies in the fact that an extra delay for the intentional beating signal is introduced in the system, which increases the instability. Another lies in the fact that the intentional beating signal is at the beginning of the spatial domain. This design makes the optical path difference (OPD) of the main interferometer much longer than that of the auxiliary interferometer. Therefore, much interpolation is implemented, which increases the probability of false information, and also significantly increases the data volume. Moreover, the intentional beating signal occupies one segment at the low-frequency position, which sacrifices a part of the effective measurement range.
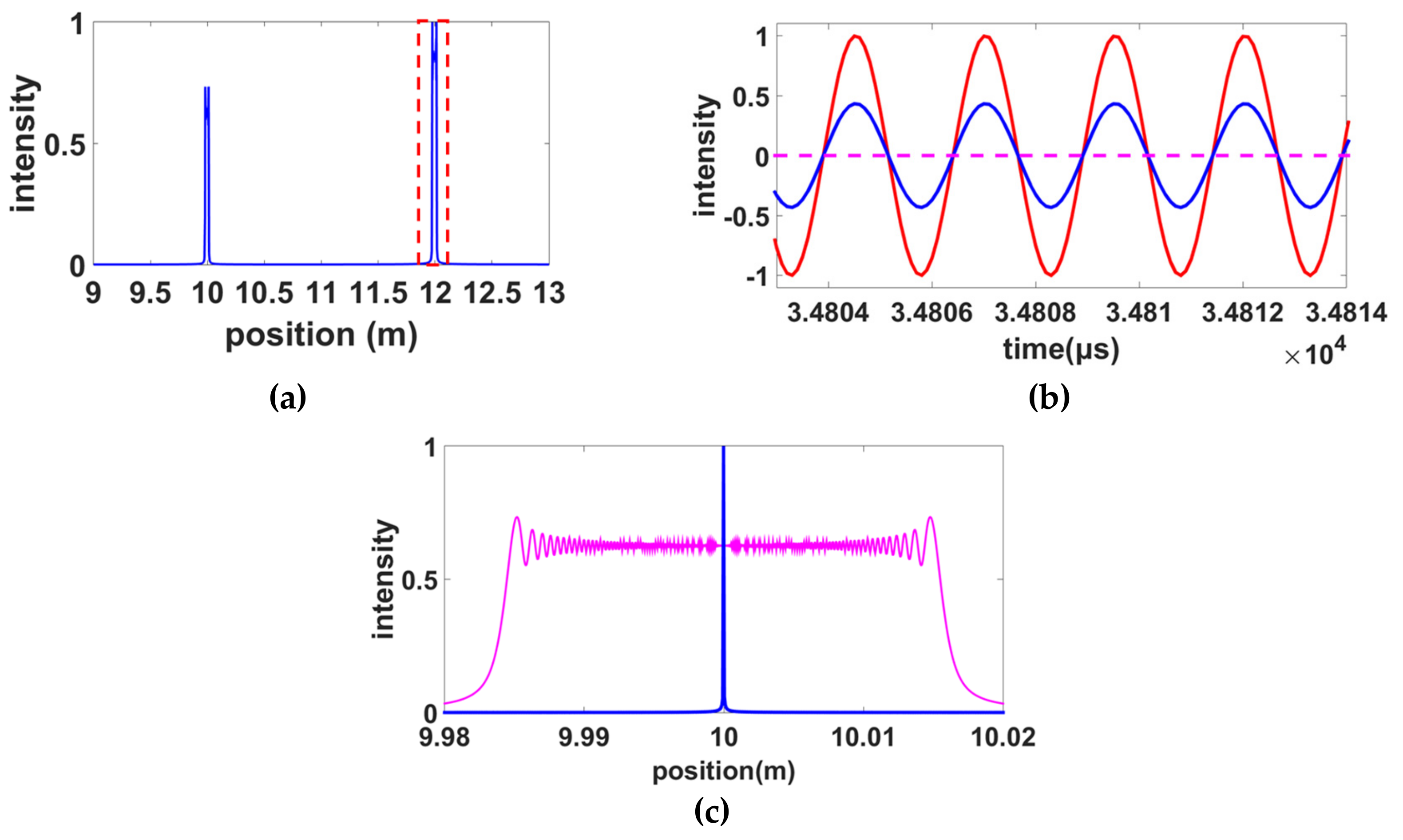
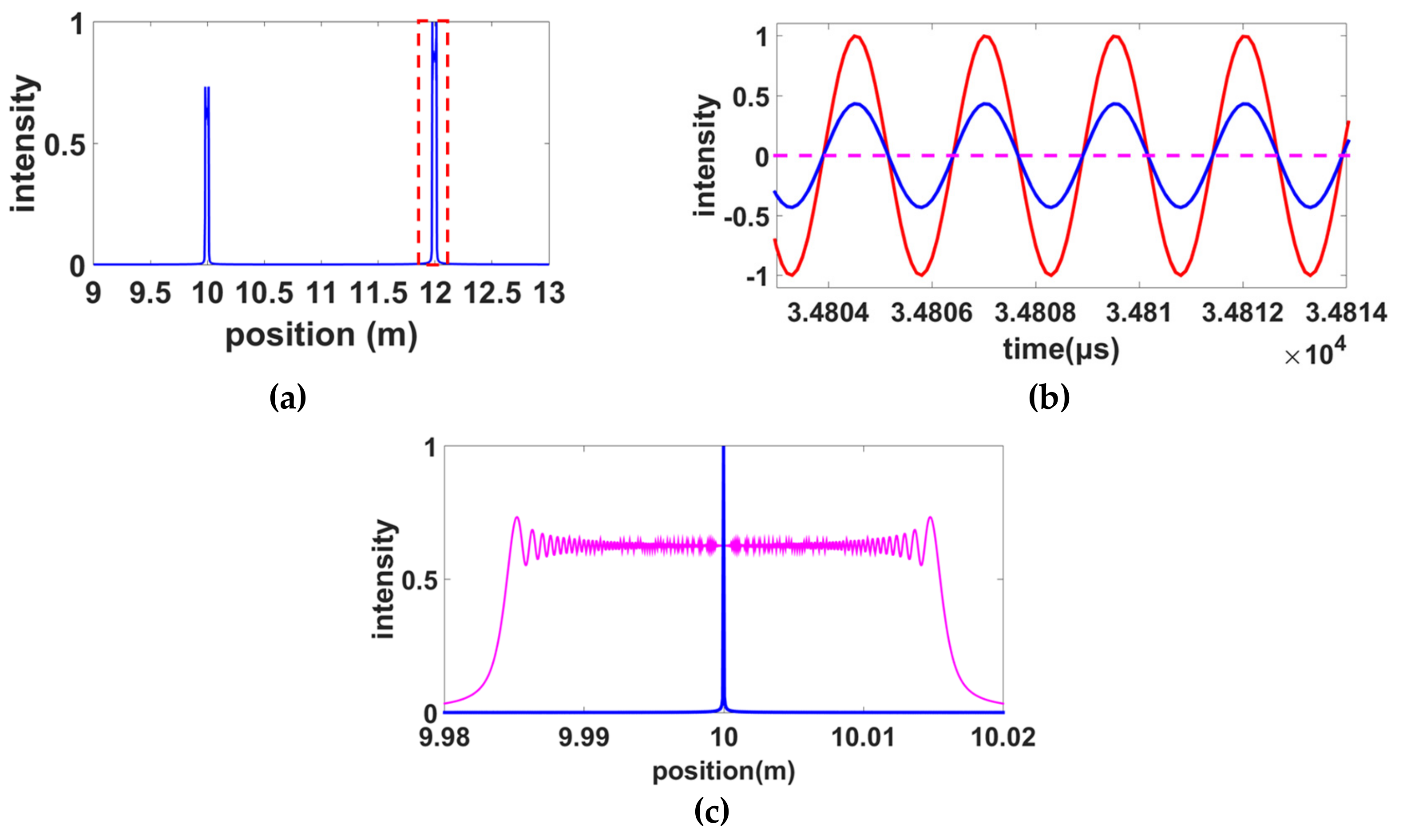
In this paper, tuning nonlinearity correction methods in an OFDR system were developed from the aspect of data acquisition and post-processing. On one hand, a new hardware-based method for real-time sampling is presented, which was implemented by designing an external clock to provide triggers at zero-crossing positions with uniform frequency spacing. The limited measurement range, which is equal to one-half of the OPD of the auxiliary interferometer in the conventional OFDR acquisition mode, can double and extend to the same length with the OPD of the auxiliary interferometer. On the other hand, the nonlinearity correction based on a single interferometer and self-reference is demonstrated. The tuning information of the laser is obtained from a PC connector at the end of the measured fiber. In this case, no extra delay fiber is needed because the fiber to be measured also plays the role of the optical path of the PC-constituted interferometer. Additionally, since the PC connector is at the end of the measured fiber, the OPD of the PC-constituted interferometer is longer than that of the main interferometer. That means that the beating frequency of the PC connector is larger than that of the reflectivity points (served as the sensing part) before the PC connector. Therefore, in the algorithm demonstrated later, substantial phase subdivision is not needed to resample the interferometer fringe signal. This makes the effect of the nonlinearity correction more stable.
The rest of this paper is organized as follows:
Section 2 and
Section 3 describe two approaches for correcting nonlinearity of the laser. The first is the external clock based on zero-crossing detection. The circuit design and scheme are demonstrated. This method is validated by the spatial resolution test and maximum measurement distance. The second is nonlinearity correction using self-reference. The principle of the method is described. The OFDR trace is analyzed, and the distributed strain is measured based on the self-reference method.
Section 4 concludes this paper and gives a brief comparison of the two methods proposed in this paper.
2. Method 1: External Clock Based on a Zero-Crossing Detection
2.1. Method Description
Ignoring the phase noise of the laser, the interference pattern of the auxiliary interferometer with a Mach–Zehnder scheme can be written as
In Equation (1),
is the tuning speed of the laser,
is the time delay of the Mach–Zehnder interferometer, and
is the initial phase. Equation (1) is equal to 0 when the phase is
In Equation (2), k is an integer.
According to
, where
is the optical frequency, Equation (2) can be written as
Then, the optical frequency at the zero-crossing points can be expressed as
In Equation (4), refers to a constant. It can be seen from Equation (4) that the optical frequency increment is equal and related to the OPD of the auxiliary interferometer at each zero-crossing point.
Next, we analyze the signal of the main interferometer. The interference intensity, which is interfered by the reflectivity point
D on the measured fiber and the local light from the reference arm in the main interferometer, can be written as
In Equation (5),
is the time delay between point
D and the local light from the reference arm, and
is the initial phase. The zero-crossing positions of the interferometer pattern of the auxiliary interferometer can be used to resample the beat signal expressed as Equation (5). When resampling the interference signal
with an interval of
as indicated in Equation (4), the resampled signal can be written as
The trigger frequency of the auxiliary interferometer is . The beating frequency of the main interferometer is . To satisfy the Nyquist criterion, it is necessary that and . Therefore, the measurable distance could reach the distance of the auxiliary interferometer. However, most commercial data acquisition cars (DAQs) can only sample at the rising or falling edge if using the external clock mode. This results in the measurable distance being limited to half the OPD of the auxiliary interferometer.
2.2. Hardware Implementation
As demonstrated by the principle above, the core task lies in designing a circuit which can detect all the zero-crossing points of the interferometer signal of the auxiliary interferometer (AI). Considering the tuning nonlinearity of the laser, the sinusoidal signal has a frequency fluctuation centered at its nominal beating frequency. The requirement for the circuit is high speed and low time delay. Furthermore, since the nominal beating frequency depends on the tuning speed of the laser, the maximum frequency of the AI signal is determined by the required measurement speed of the system. In our system, the maximum frequency of the AI signal is designed to be 20 MHz. That means that the maximum input frequency of the circuit for zero-crossing detection is 20 MHz. The total time delay of the circuit should be less than half a period of the AI signal. Under this rule, the trigger signal of the circuit can be considered to track and reflect the changing-frequency AI signal with success. The half-period is 25 ns when the frequency is 20 MHz. Therefore, it should result in the final trigger signal having a total time delay less than 25 ns on the consideration of the device selection for the circuit.
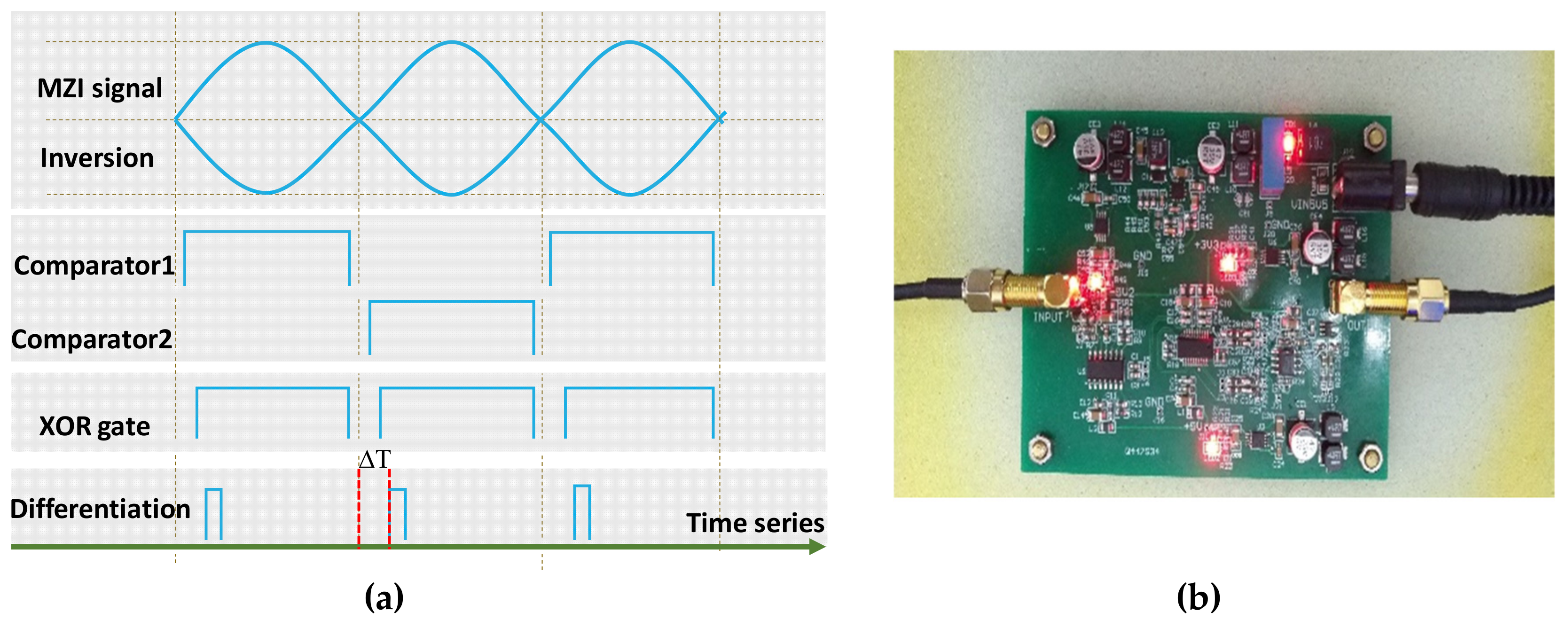
Figure 1 shows the circuit scheme of zero-crossing detection for the AI signal.
Figure 2a gives the signals at each node. The AI signal is inversed firstly. Then, the original AI signal and its inversion signal are sent into the two comparators. The output of the two comparators goes through a high level every half-period of the AI signal. Then, the output of the comparators is sent to an XOR gate, after which the square wave appears at each half-period of the AI signal. The differentiation unit is used to convert the square wave to a narrow pulse. The narrow pulse serves as the trigger signal. The rising edge of the trigger signal appears after the zero-crossing of the AI signal. The time delay
depends on the time delay sum of each component delay in the circuit.
2.3. Experiment
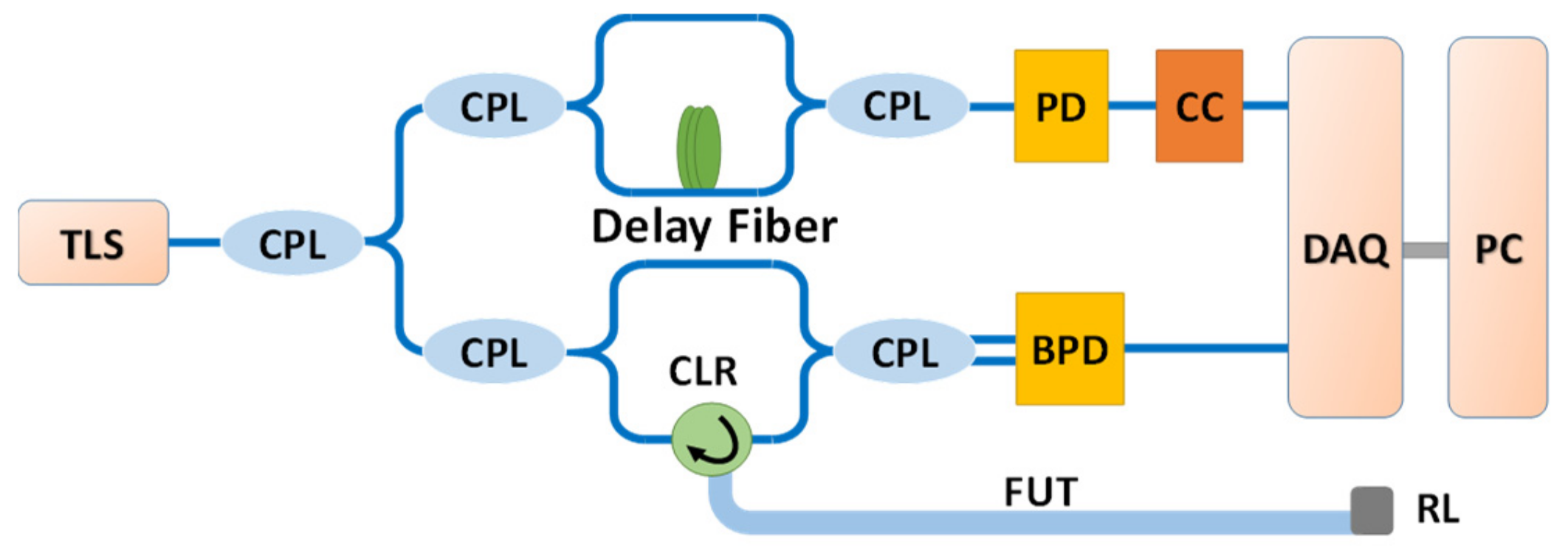
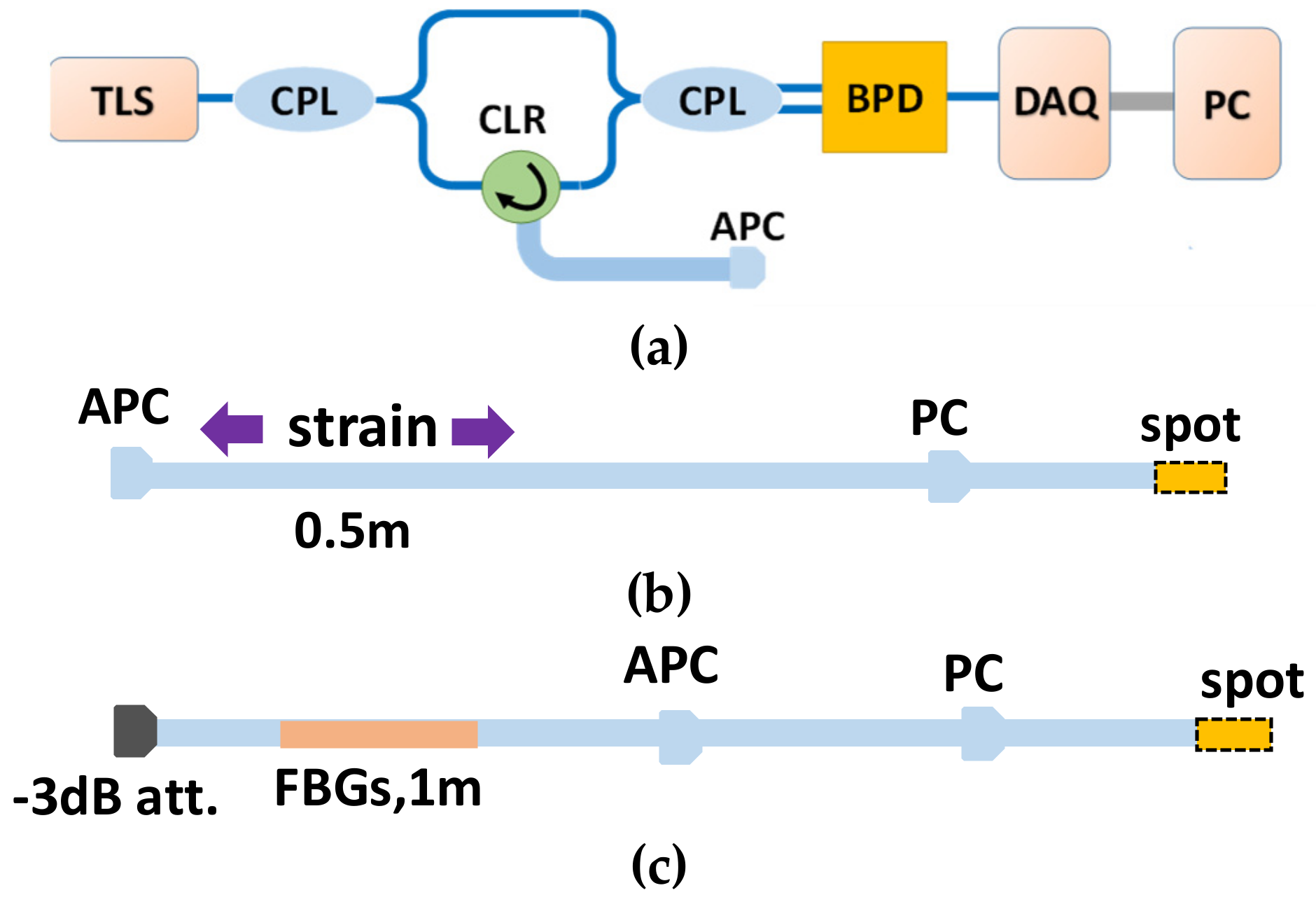
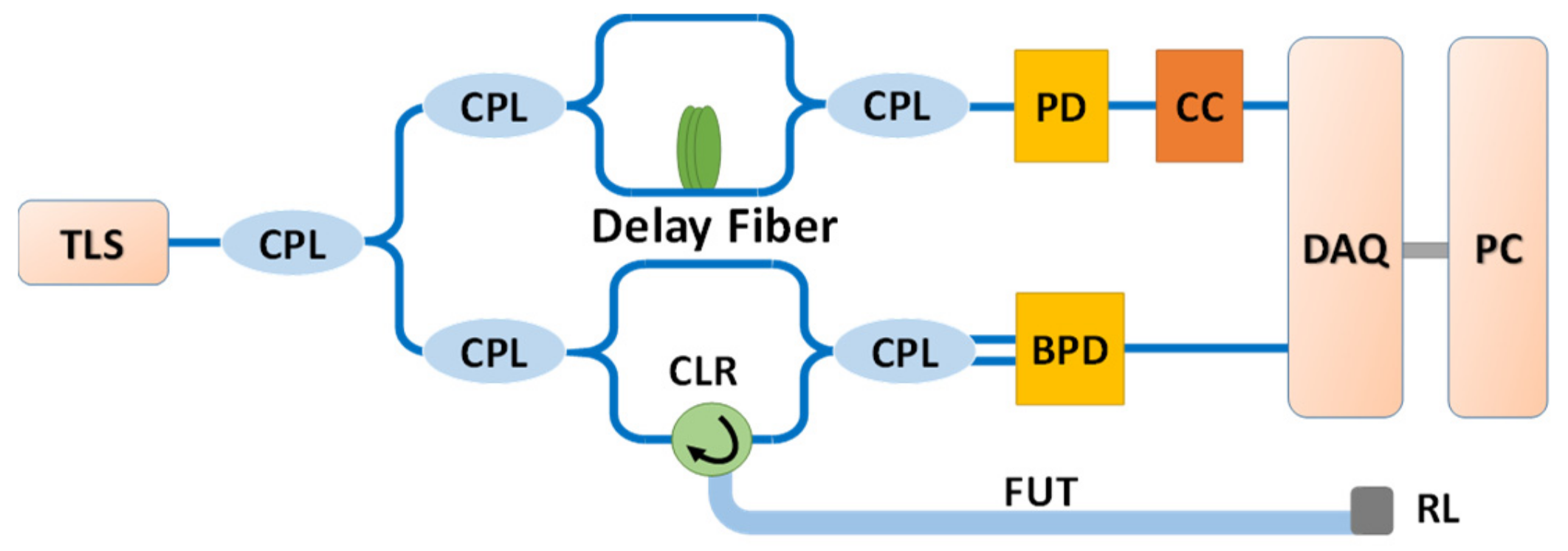
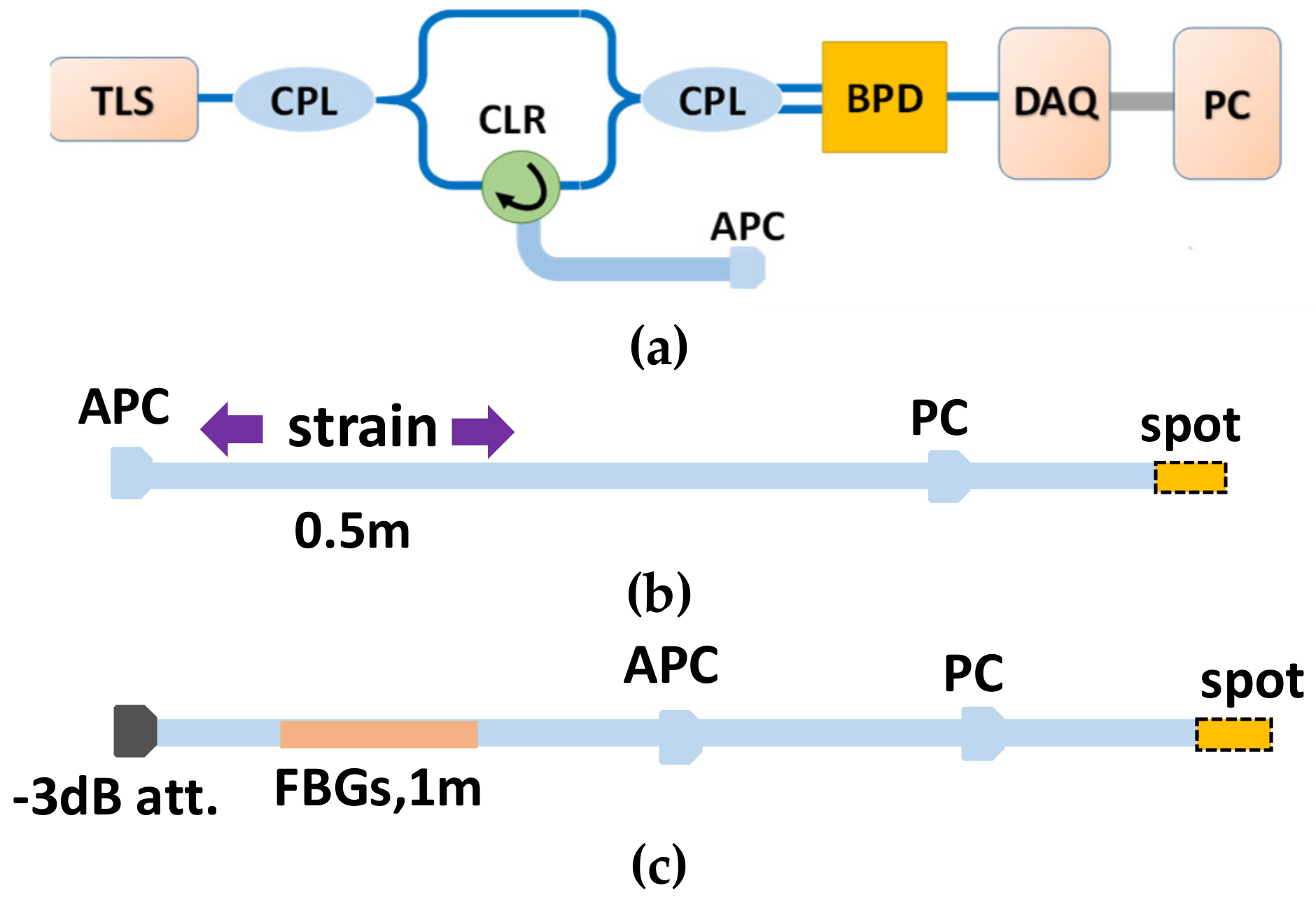
A conventional OFDR system is shown in
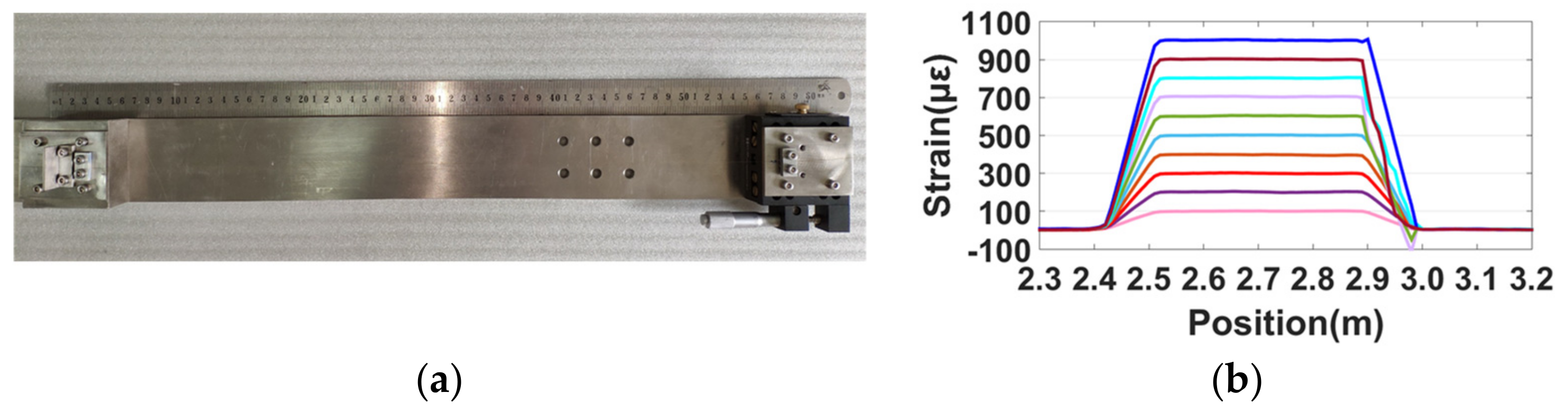
Figure 3. The light from the laser (LUNA, Phoenix 1400 with 3 MHz linewidth) is split into two paths by a 10:90 optical coupler, with 10% light sent to an auxiliary interferometer with a delay fiber of 250 m. The measured fiber has a length of 122 m; thus, its round trip is about 250 m. The end of the fiber is an APC connector immersed in a refractive index matching liquid for the sake of reducing reflectivity. The laser sweeps from 1540 nm to 1560 nm; thus, the two-point spatial resolution
of the system is 40 μm calculated by
, where
n is the refractive index of the fiber under test (FUT), and
is the optical frequency tuning range of the TLS. The customized clock circuit is added after the PD. The sampling mode of the data acquisition card (DAQ) is set to use the rising edge of the external clock as the trigger source.
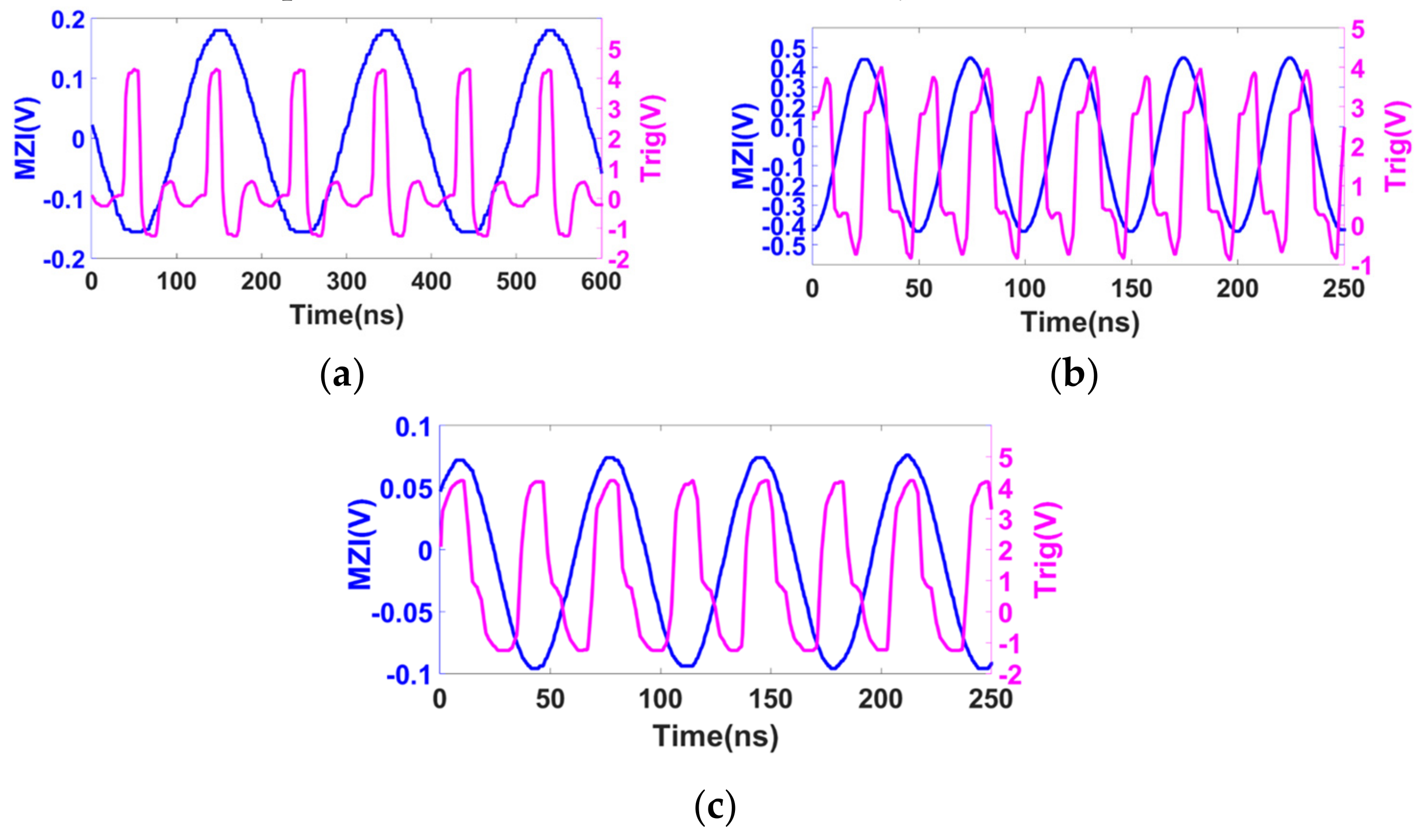
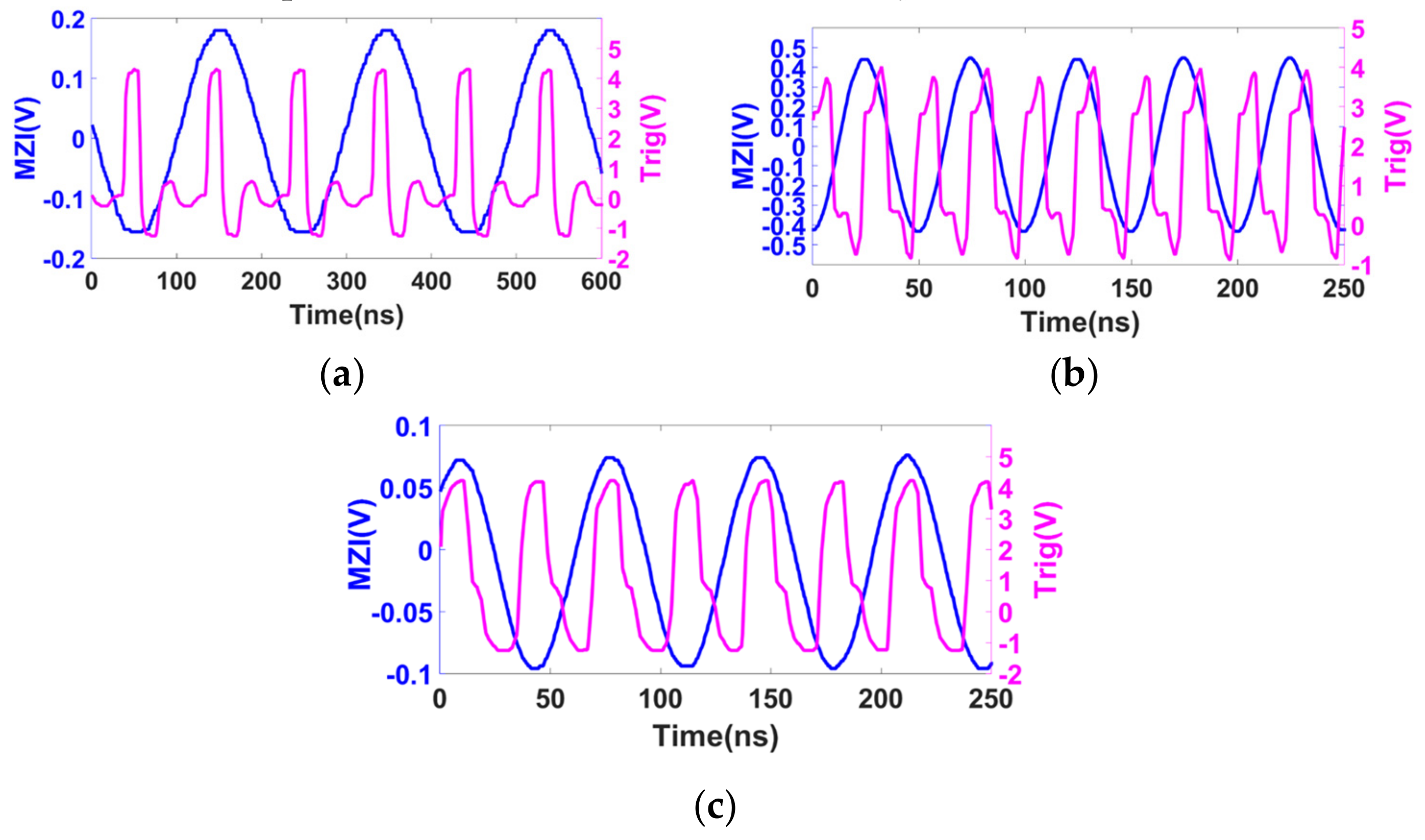
Firstly, the input–output timing sequence of the customized clock circuit was tested. Different tuning speeds were set so that the nominal beating frequencies of the AI signal were different. The beating frequency satisfied
, where
is the tuning speed with a unit of Hz/s, and
is the time delay of the auxiliary interferometer. The tuning speeds of 32 nm/s, 80 nm/s, and 128 nm/s corresponded to beating frequencies of 5 MHz, 12.5 MHz, and 20 MHz, respectively. The input–output time sequences are shown in
Figure 4. It can be seen that the time delay between the zero-crossing point and its following trigger signal were all within one half-period of the AI signal. Furthermore, this time delay was almost the same and can be considered as constant if the time delay difference of the two comparators used in the circuit is negligent.
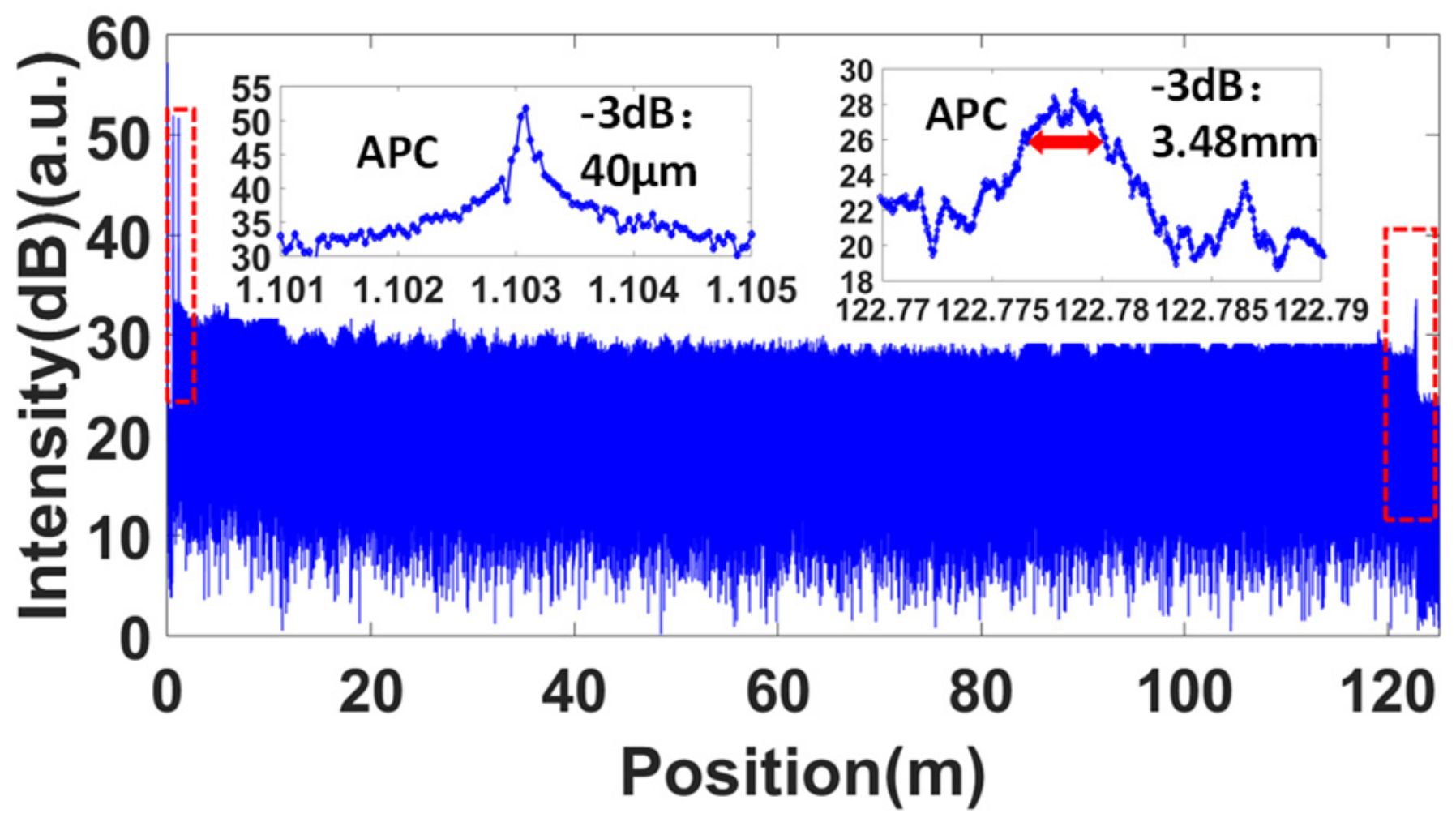
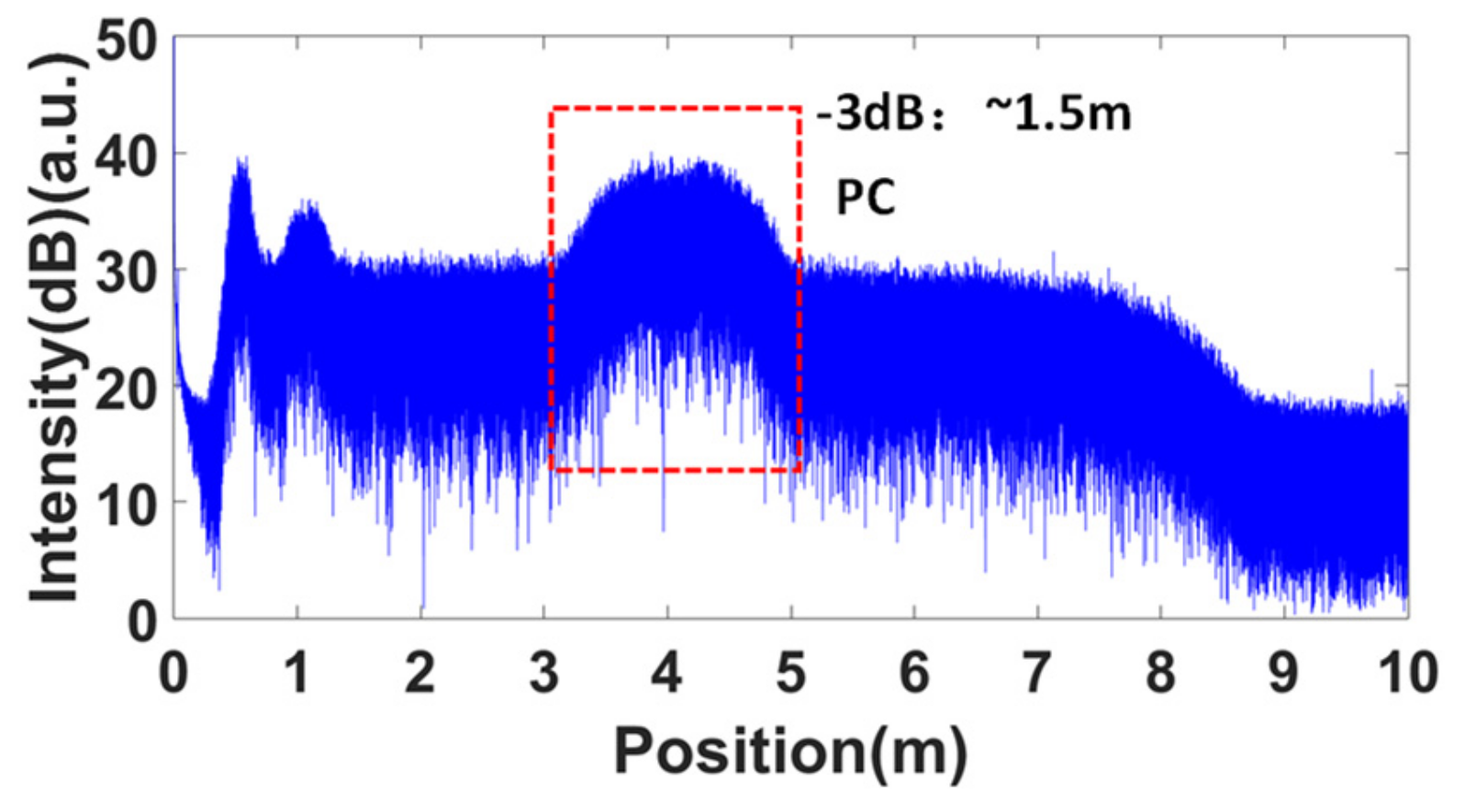
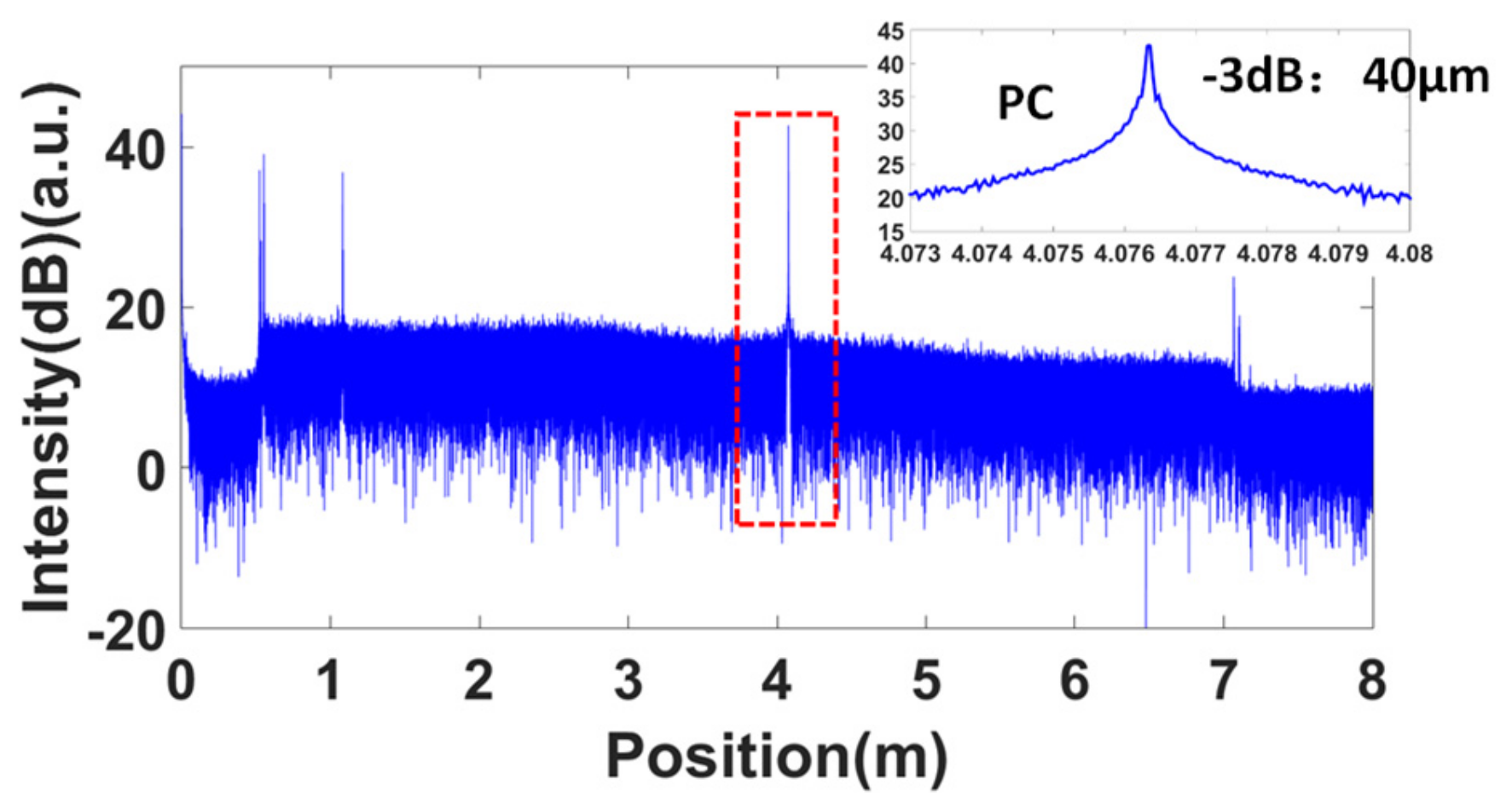
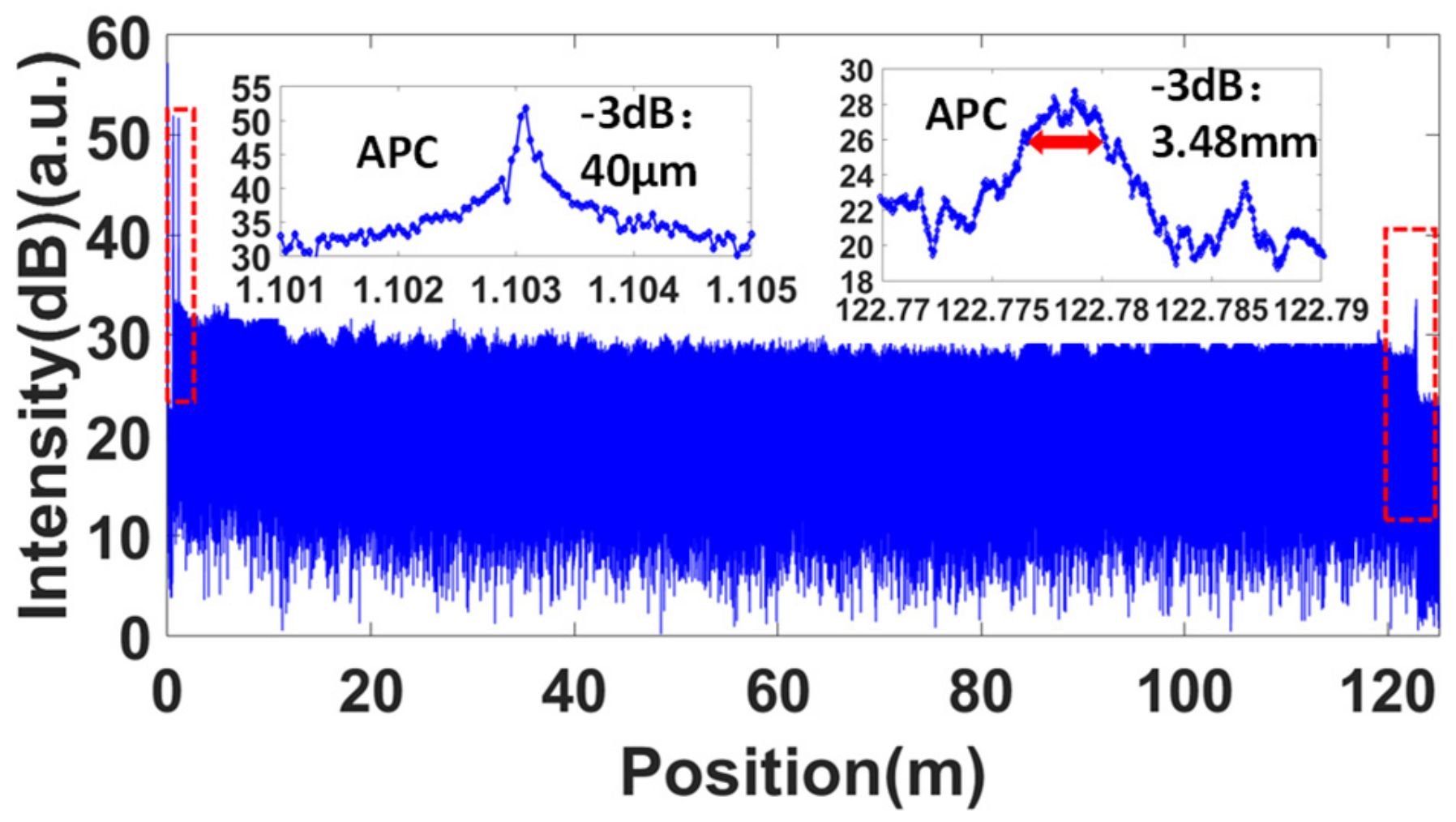
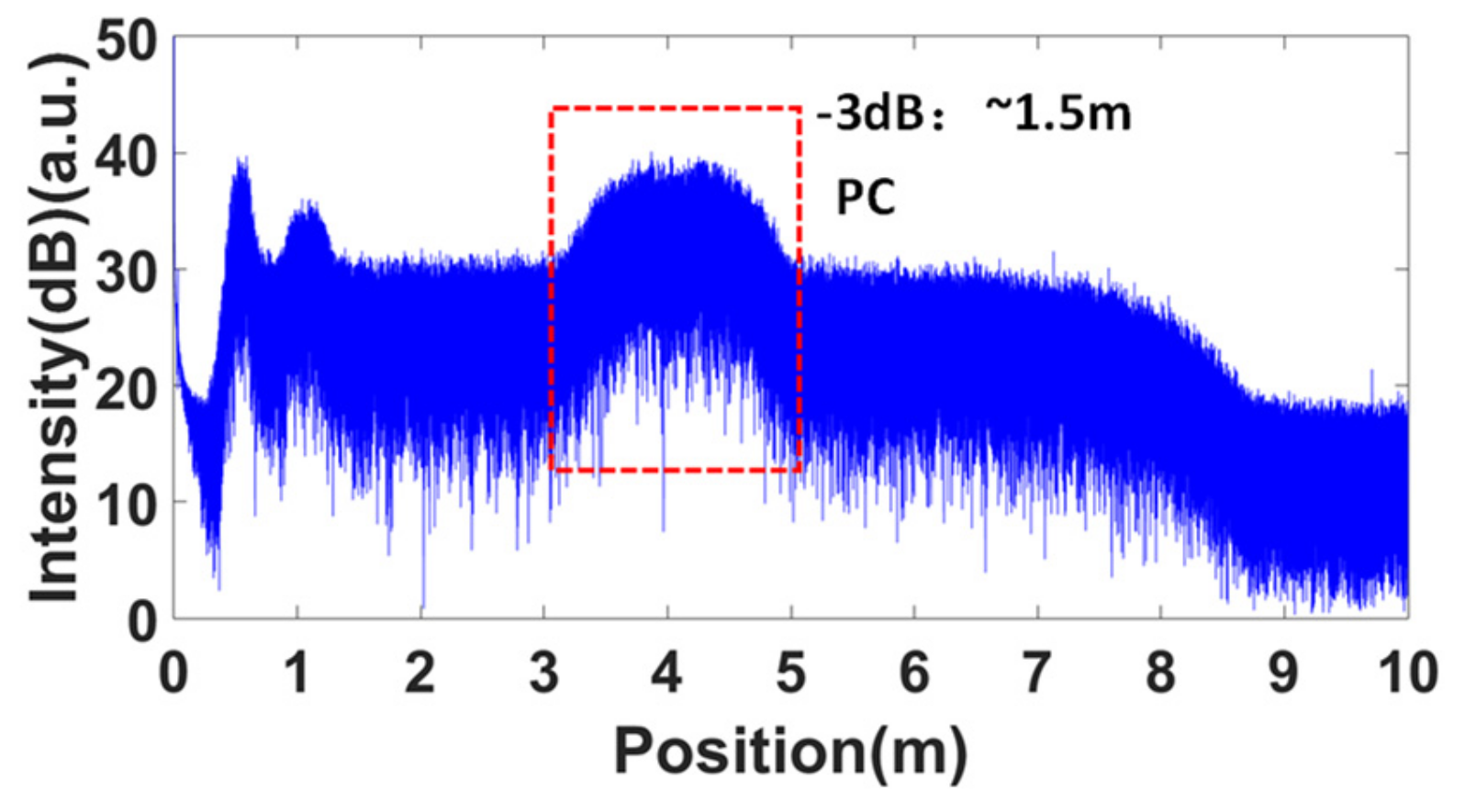
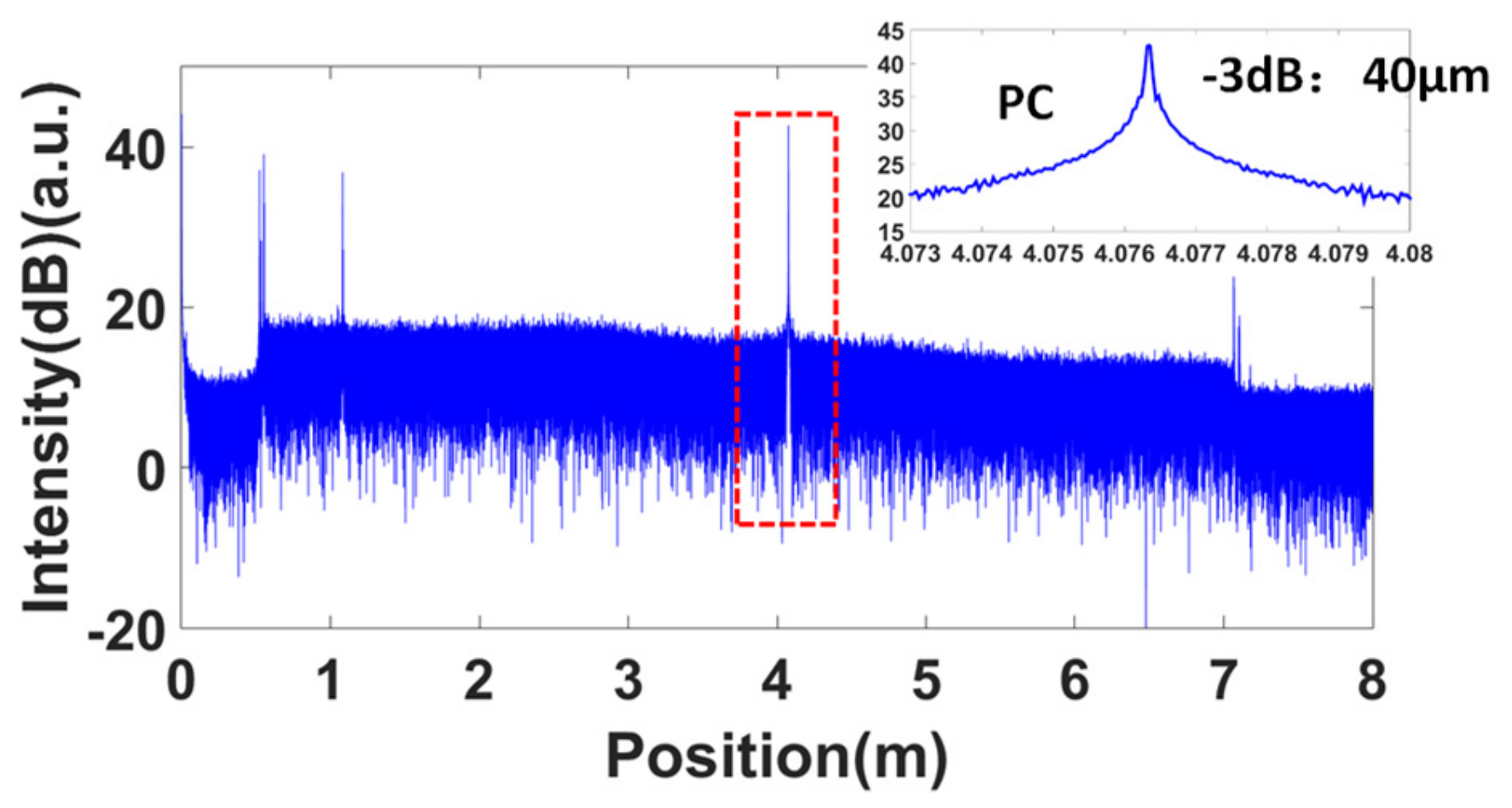
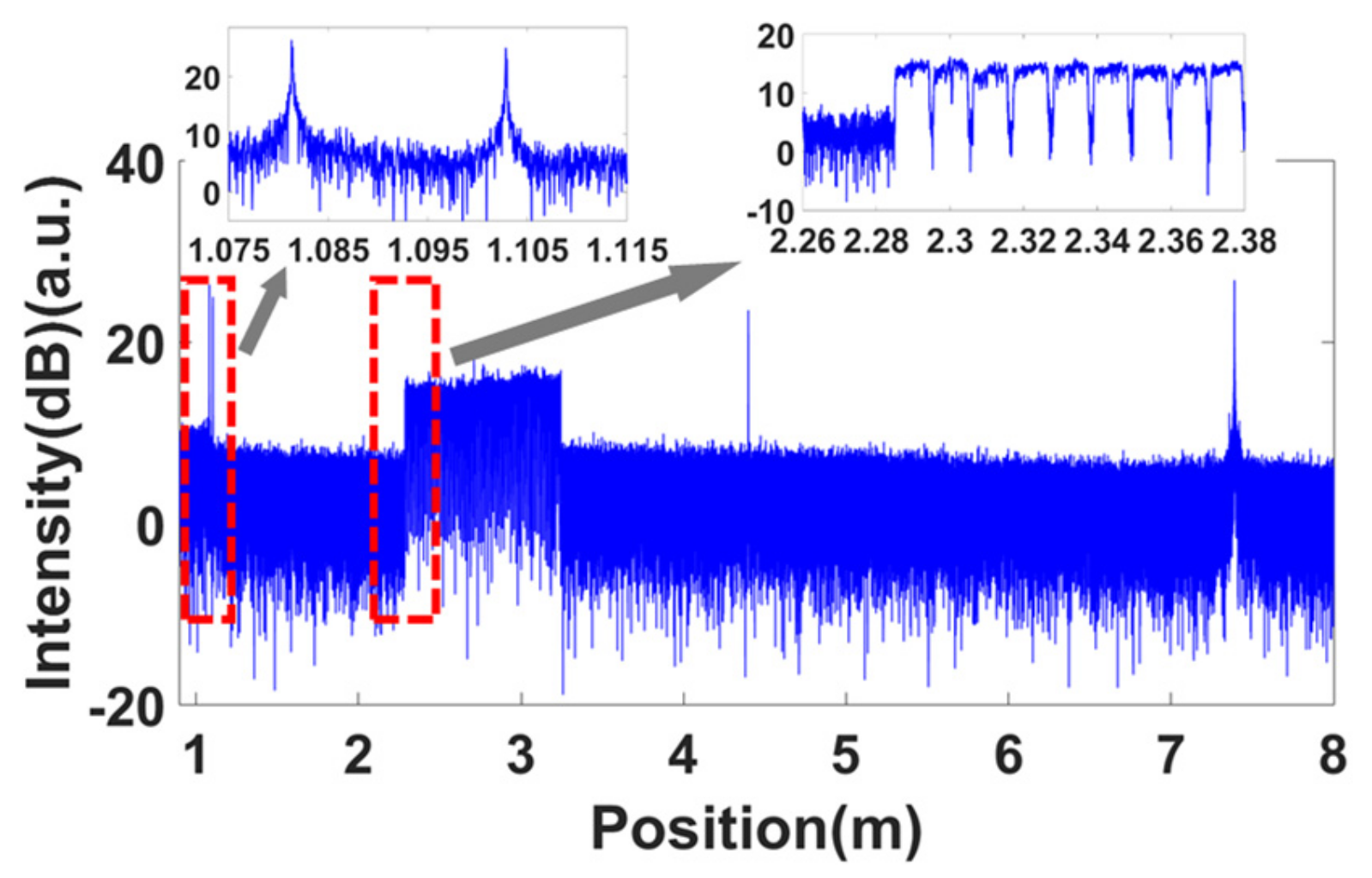
Then, the OFDR trace was sampled by the DAQ with our customized clock circuit at the condition of 80 nm/s tuning speed. The nominal beating frequency of the AI signal was then 12.5 MHz. The original signal from the main interferometer was fast Fourier transformed to the spatial domain. The result is shown in
Figure 5. It can be seen that the measurement length can reach a length equal to the OPD of the auxiliary interferometer. To evaluate the linearity of the system quantitatively, the full width at half maximum (FWHM) of the reflectivity peak of a fiber connector is generally used. The FWHM of the APC connector was 40 μm, which was the Fourier transform-limited spatial resolution [
10]. At the end of the fiber, the FWHM of the APC connector decreased to about 3.48 mm. The resolution deterioration mainly came from the increasing phase noise of the laser, which increased with the length, and also from the immersion in the refractive index matching liquid.
4. Conclusions
In summary, we developed methods for tuning nonlinearity correction in an OFDR system from the aspect of data acquisition and post-processing. Based on their principles, these two methods both took advantage of the auxiliary interferometer information (in the self-reference method, a PC-constituted interferometer served as the auxiliary interferometer) to find the equal-spacing frequency position. The difference was that the former triggered the acquisition only at the position of zero-crossing, while the latter extracted the phase information to obtain the continuous phase changing of the laser. Therefore, in the second method, a smaller frequency interval can be set, and this makes it possible to achieve nonlinearity correction for a longer measurable range. Another difference between these two nonlinearity correction methods is that the correction method implemented by the hardware is high-speed and in real time. The correction using post-processing is not in real time, although it can approach real time with the usage of high-performance computing equipment. The advantage of the self-reference method lies in that, compared to the conventional post-processing method, the self-reference method can reduce the hardware and data burden for the system, and it is expected to have potential value in system integration and miniaturization.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}