2. Related Work
The 5G NR standard introduces the use of grant-free scheduling (also referred to as Configured Grant [
7]). With grant-free scheduling, the network pre-configures the radio resources and assigns them to UEs without waiting for UEs to request resources. UEs can utilize the pre-assigned resources as soon as they have data to transmit. This is in contrast to grant-based scheduling, where UEs must request access to radio resources through the transmission of Scheduling Requests (SR). The BS assigns the radio resources to the UEs and notifies them using grant messages. UEs must wait to receive these grant messages before transmitting any data. Grant-free scheduling eliminates all delays introduced by the handshaking present in grant-based scheduling. Grant-free scheduling also improves the energy consumption of the UEs, reduces their complexity, and decreases the signaling overhead compared with grant-based scheduling ([
8,
9]). Grant-free scheduling can assign dedicated or shared resources to the UEs. The BS decides whether resources are dedicated to specific UEs, or are shared by a group of UEs [
10]. Reserving resources to dedicated UEs is an interesting approach when we can plan ahead what is the demand for resources. This is for example the case of periodic traffic. However, reserving resources to dedicated users can be highly inefficient if the traffic demand is uncertain or aperiodic, and it is not possible to anticipate when these resources will be needed. In this case, it is possible to share radio resources by a group of UEs. This option ensures a more efficient utilization of resources, and the possibility to satisfy URLLC communication requirements. However, users must contend for the resources, and collisions can happen if two or more UEs simultaneously contend for the same resources. 5G NR introduces the possibility of transmitting
K replicas of the same packet in consecutive slots to combat collisions and thus increase the probability of a correct reception [
11,
12].
The study in [
13] analyzes the performance of the
K replicas scheme. The authors propose transmitting the first copy of a packet using dedicated resources, and the following replicas using shared resources. The proposal also exploits shared diversity and advanced receiver processing techniques to reduce the impact of packet collisions. The proposal achieves adequate reliability levels and reduces the number of reserved (shared) radio resources, compared to a configuration that reserves resources to dedicated UEs. The study in [
14] also transmits the first copy of a packet using dedicated resources. However, it does not consider the transmission of
K replicas of a packet. Instead, the authors propose to retransmit the original packet in a shared resource only if the first transmission is not successful. This requires a handshaking between the UEs and the BS to exchange acknowledgement messages. This handshaking increases the latency, and can compromise the capability to adequately support URLLC applications with stringent latency requirements. In [
15], the authors study the optimum number of replicas (
K) necessary to achieve a target reliability level within a deterministic latency deadline. The study focuses upon aperiodic traffic and the case in which a group of UEs share resources. The authors show that randomly choosing the resource for each replica increases the probability of correctly delivering a packet. However, the study focuses on reliability levels up to 1–10
−5 while some critical Industry 4.0 applications require higher reliability levels.
Previous studies have shown that transmitting
K-repetitions of a packet increases the reception rate. However, this can be done at the expense of an inefficient use of the radio resources due to packet collisions or the unnecessary reservation of resources when the first replicas are correctly delivered. Latency requirements may also impose restrictions on the number of replicas that can be transmitted, and consequently on the reliability levels that may be achieved. In this context, several recent contributions have analyzed slight modifications to the
K-repetitions scheme. For example, [
16] proposed adaptively configuring the number of replicas transmitted based on the channel conditions. The objective is to utilize the radio resources efficiently by avoiding unnecessary retransmissions when the channel quality is good. A similar objective is sought in [
17] where authors propose conditions to stop the transmission of replicas. Other interesting proposals in 3GPP standardization working groups include: the transmission of replicas within mini-slots (to reduce the latency) [
18], the possibility for transmitting replicas across the slot border, or the concept of periodicity boundary [
19]. These studies propose interesting variants of the
K-repetitions scheme. However, it is yet unknown whether 5G NR grant-free scheduling with
K-repetitions and shared resources can really support URLLC communications with strict reliability and latency requirements under the presence of aperiodic or sporadic traffic. This traffic is critical in many verticals, for example in Industry 4.0. In this context, this study conducts an in-depth evaluation of 5G NR grant-free scheduling with
K-repetitions and shared resources in the presence of aperiodic or sporadic traffic. The study identifies the reliability and latency levels that can be achieved with 5G NR grant-free scheduling, and identifies its current limitations. The study analyzes the impact of the number of UEs in the network, the number of reserved radio resources, and the number of replicas
K. The study also analyzes for the first time the impact of self-collisions. The conducted analysis helps to identify the reliability and latency levels that can be achieved based on network deployments and configuration options for 5G NR grant-free scheduling.
It should be noted that 3GPP standards define the possibility of utilizing grant-free scheduling and transmitting
K replicas, but do not define a specific scheme to be implemented. This study is based on the implementation of 5G NR grant-free scheduling with
K replicas and shared resources proposed in [
15]. This implementation is chosen because it has been specifically designed to guarantee stringent URLLC latency and reliability requirements. To this aim, the implementation transmits original packets and all of the replicas using grant-free scheduling on shared radio resources. A different approach is proposed in [
13] where dedicated resources are used to transmit the original packets, and shared resources are used for the following replicas. This approach can increase the delay compared to [
15] if grant-based scheduling is utilized to allocate the dedicated resources. The efficient utilization of resources could also be compromised if dedicated resources were reserved for each UE when supporting applications with aperiodic traffic. The implementation of 5G NR grant-free scheduling with
K–repetitions and shared resources proposed in [
15] is therefore better suited to support URLLC applications with aperiodic or sporadic traffic.
3. Grant-Free Scheduling
This paper uses grant-free scheduling with
K-repetitions and shared resources to evaluate the reliability and latency levels that can be achieved in the presence of aperiodic traffic. Following [
20], reliability for URLLC services is defined as the percentage of data packets that are successfully delivered before the latency deadline
L established by the service or application. Following 3GPP standards [
11], UEs transmit the same data packet in
K consecutive transmission slots with a duration
The UE randomly selects an RB (Resource Block) for each transmission from the
U RBs available per
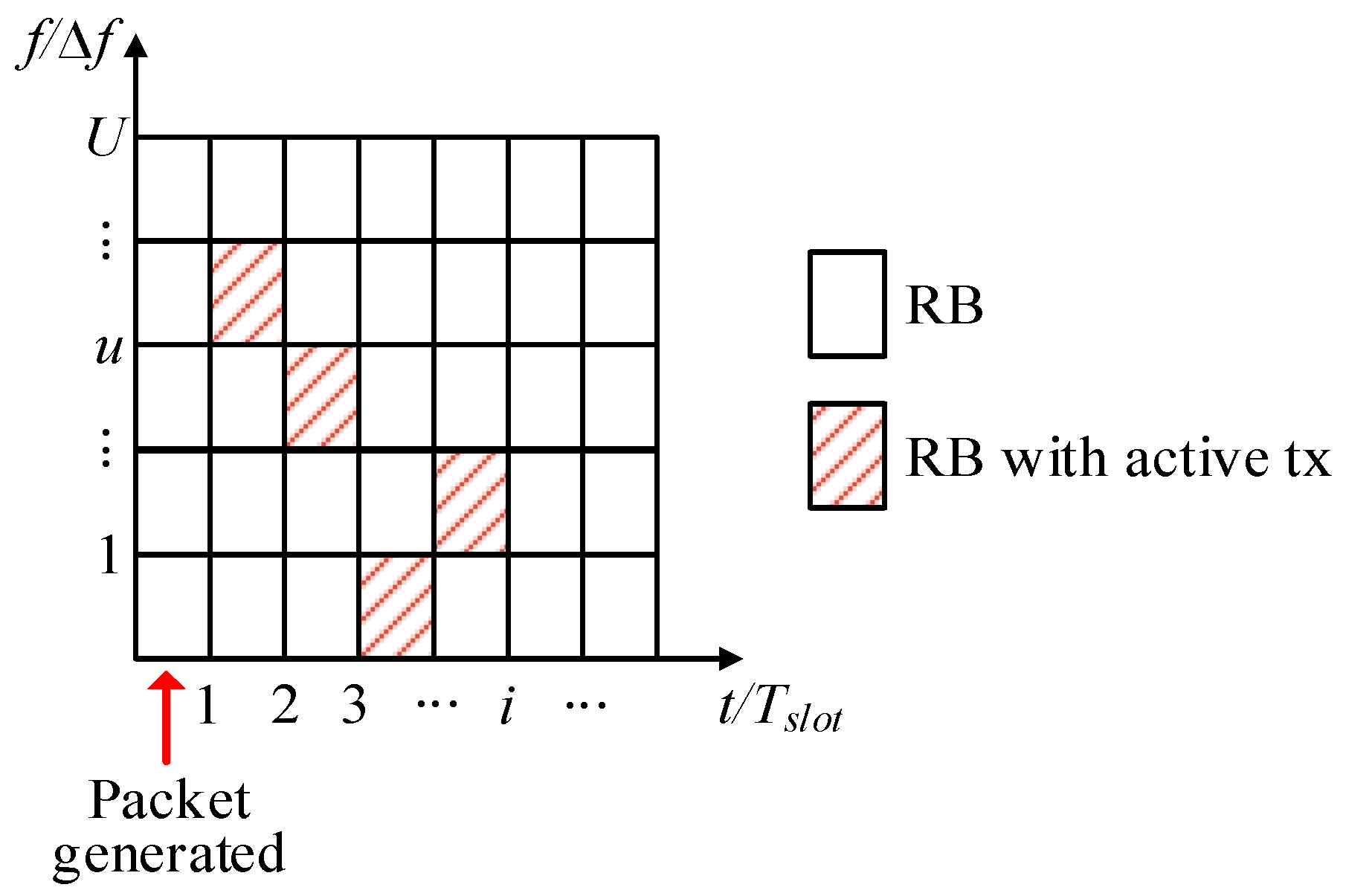
This is illustrated in
Figure 1 that represents the time/frequency resource grid map in 5G NR, where the unit is an RB. In 5G NR, a wideband channel is divided into sub-frames, slots and RBs. An RB is the smallest unit of frequency resources that can be allocated to a UE. Without loss of generality, this study considers a numerology
µ equal to 3 with a subcarrier spacing of 120 kHz [
21]. An RB is then 1440 kHz (∆
f) wide in frequency (12 sub-carriers of 120 kHz) and lasts for one time slot with the duration
equal to 0.125 ms.
The reliability at the medium access level that can be achieved with grant-free scheduling with
K-repetitions and shared resources depends upon two main factors. The first factor is the possibility that a packet is not correctly received due to the collision of all its
K replicas with other transmissions; this is due to the random selection of the RB for the transmission of each replica. The study in [
15] showed that the possibility to successfully deliver a packet increases with the number
K of replicas. The second factor is the effect of self-collisions. A self-collision occurs when a UE has to transmit a new packet, and the transmission of the
K replicas of the previous packet has not finished. If this happens, the new packet must be stored, and its transmission is delayed until all the replicas of the previous packet have been transmitted. This delay can result in the case that the new packet cannot be delivered within the latency limit, and hence self-collisions can impact the reliability of URLLC services. It is important then that the reliability (or probability that a packet is correctly received before the latency deadline) of grant-free scheduling with
K-repetitions and shared radio resources is computed considering both the effect of collisions from other UEs, and the effect of self-collisions. In this case, the reliability or probability
that a packet is correctly received by the BS must consider the probability
that the transmission of the
K replicas of a packet is not completed before the latency deadline
L due to the effect of self-collisions. For the packets that are not affected by the effect of self-collisions, it must be considered the probability
that a packet is not correctly received due to the collision of all its
K replicas with other transmissions. Hence,
can be expressed as:
In [
15], its authors presented an expression to approximate the probability
of the collision of the
K replicas of a packet with the transmission of other UEs. The expression was derived in scenarios where
N UEs share the same pool of RBs. However, [
15] did not analyze the impact of self-collisions, since the study only considered low values of
K (equal to or lower than 4). For these low values, self-collisions might not have an impact upon the reliability, as will be later shown. In this paper, we analytically derive the exact probability of any collision of the
K replicas of a packet with packets transmitted by other UEs (
). We also quantify the impact of self-collisions (
), and analytically compute the reliability that can be achieved by grant-free scheduling with
K-repetitions and shared resources (
). These analytical expressions are a valuable contribution to the community since they can be easily utilized to evaluate 5G NR grant-free scheduling. The availability of these exact analytical expressions is particularly useful when considering applications with very demanding reliability and latency URLLC requirements. This is the case of certain Industry 4.0 applications. For example, motion control requires a maximum latency of 1 ms and a reliability of 1–10
−6. Control-to-control applications require a maximum latency of 4 ms and a reliability of 1–10
−8. Factory automation applications usually demand maximum latency values in the range 0.25–2.5 ms and reliability levels up to 1–10
−9. In this case, simulations can be very computationally expensive if we want to compute the packet reception rate (1 −
) with reliability demands in the order of 1–10
−6 to 1–10
−9. In these scenarios, errors are very rare, and we need long and computationally expensive simulations to achieve accurate results. The analytical methodology utilized in this study is then an adequate and efficient tool for scenarios with demanding URLLC communication requirements.
3.1. Collisions with Other UEs
First, we focus on the probability
that a packet is not correctly received due to the collisions of its
K replicas with the packets transmitted by other UEs. To this end, we consider UL transmissions and
N UEs within a single cell with aperiodic traffic. Packets are generated by each UE following a Poisson distribution with exponential inter-arrival time. The average packet inter-arrival time is equal to 1/
λ, where
λ is the average number of packets generated per second. We consider the transmission of small packets with a size of 32 bytes [
22], and we assume without loss of generality that each packet requires only one RB.
The probability
that one or more packets are generated for a UE in a time period
is equal to:
We define
as the set of UEs for which a new packet could be generated in a slot
(the slot has a time duration equal to
). Here,
is the number of UEs that do have a new packet to transmit in
This
can then take any value between 0 and the cardinality of
. The probability
that
UEs from the set
of UEs have new packets to be transmitted in
with duration
is equal to:
where
represents the number of elements or the cardinality of the set
A packet will not be successfully delivered to the BS if all its
K replicas collide with the trans-missions of other UEs. A UE has an active transmission in
if it generated a new data packet in the previous slots
…,
and
. If this is the case, then the UE would be transmitting one of the
K replicas in
. We denote as
the number of UEs with active transmissions in
. The probability
that
UEs do not collide with a given UE is equal to the probability that they do not select the same RB at a given slot for their next transmission as the UE under study.
is given by:
Equations (2)–(4) are necessary to compute the probability
that a packet is not correctly received at the BS due to the collision of all its
K replicas with the transmissions of other UEs. To compute
, let us consider the case of a particular UE
1 that has to transmit the
K replicas of a packet in slots
,
, …,
. For the sake of clarity, we consider an example with
K = 4, and
corresponding to
.
is then equal to the probability of collision of the 4 replicas transmitted in
,
, and
, which is represented by
:
To determine
, we first study the probability
that the replica of the packet transmitted in
collides with a transmission from any other UE.
is given by the probability that one or more UEs (in addition to UE
1) have an active transmission in
(i.e.,
1), and that one or more of the
UEs select the same RB as UE
1 for their transmission.
is equal to
n0 +
n1 +
n2 +
n3, and the probability
has to consider all possible combinations of
n0,
n1,
n2 and
n3 that result in
1. The probability
can then be expressed as:
where
and
represent the maximum and minimum possible values of
ni in each slot, and are equal to:
where
is the set of UEs that could have a new packet to be transmitted in
is equal to the total number of UEs (
N) minus UE
1 and all active UEs in the slot previous to
The cardinality of
is then equal to:
It should be noted that
is equal to 0 or 1 in order to guarantee that
is equal to or higher than one.
can be expressed as:
To achieve finally the expression of
, we need to incorporate to the expression of
in (6) the probability that one or more of the
UEs select the same RB as UE
1 for their transmissions. This probability is equal to 1 −
.
is then calculated as:
The probability of collision of the replica transmitted in
depends upon the number
of UEs with active transmissions in
. This
depends on the number
n1,
n2,
n3 and
n4 of UEs that have new packets to transmit in
,
,
, and
, respectively. The probability that UEs have new packets to transmit in
,
, and
is already included in (11)
and
respectively). In this context,
and
are not independent, and they must be calculated jointly. We then compute the joint probability
that the replicas transmitted in
and
collide with transmissions from other UEs. Computing
only requires including in (11) the probability that there are UEs with new packets to be transmitted in
(i.e.,
and the probability that one or more of the active
UEs in
select the same RB for their transmission than UE
1.
can then be expressed as:
where
,
and
are defined as:
The process followed to account for possible collisions of the replicas transmitted in
and
is similar to that considered for
.
can then be expressed as follows when
K = 4:
where
,
and
∀
i ∊ [0, 2⋅
K−1] are defined as:
The process illustrated for
K = 4 can be followed to compute
for any value of
K. As shown in (22),
can be computed using the auxiliary function
defined in (23) with
i equal to cero. To simplify the notation,
is also represented as
in (22) and (23). As it can be observed in (23),
depends on
, and in general,
depends on
, until
.
The parameters , and in (23) correspond to those expressed in (18)–(21).
3.2. Self-Collisions
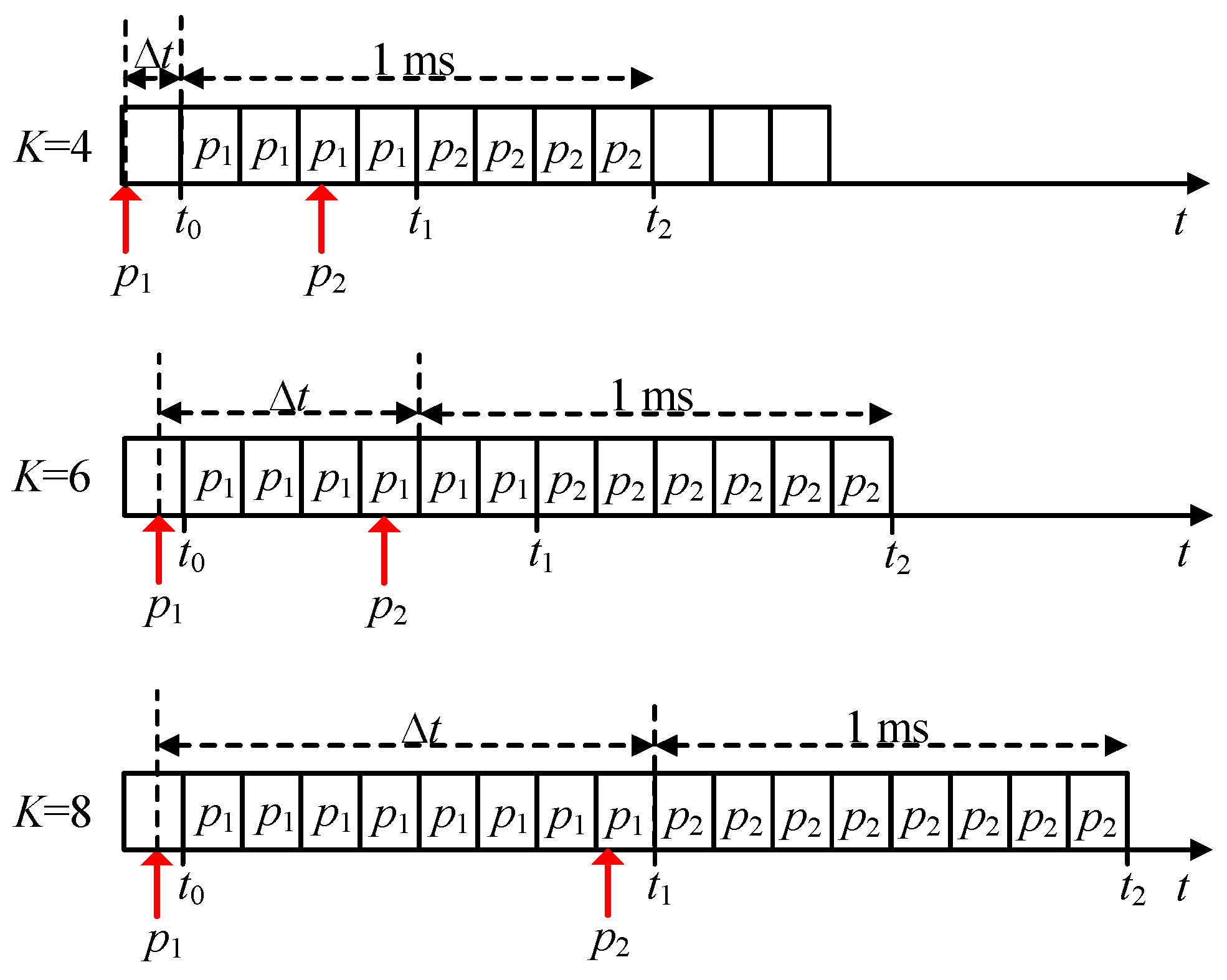
The effect of self-collisions is illustrated in
Figure 2. We may suppose that a UE starts transmitting a packet
p1 that was generated before
t0. Let us then suppose then that a second packet
p2 is generated before the
K replicas of the previous packet
p1 have been transmitted. This is a self-collision. If a self-collision happens,
p2 can be stored, and its transmission will start after the UE has transmitted the
Kth replica of
p1 (i.e., at
t1 in
Figure 2). The transmission of the
K replicas of
p2 will finish at
t2 that is equal to:
The transmission of the
K replicas of
p2 may finish after the latency deadline
L, due to the time
p2 being stored as the
K replicas of
p1 are being transmitted. We then analyze the probability
that the transmission of
K replicas of a packet is not completed before
L due to the effect of self-collisions. This probability depends upon the number of replicas
K and on the time instant at which
p2 was generated.
Figure 2 illustrates how self-collisions affect the probability of completing the transmission of
p2 before
L, with
L equal to 1 ms.
L = 1 ms implies that the maximum number of replicas
K that can be transmitted per packet is 8. However, it is possible to transmit less than 8 replicas, and
Figure 2 represents the case in which
K is set equal to 4, 6 or 8.
p2 can be transmitted before the deadline
L if it is generated at any time instant after
t2 −
L, where
t2 is the time at which the transmission of the
K replicas of
p2 is finished (the transmission of
p2 starts when the transmission of the
K replicas of
p1 has finished at
t1). If
p2 is generated before
t2 −
L, it is not possible to complete the transmission of the
K replicas of
p2 before the latency deadline
L.
can then be computed as the probability that the time between the generation of two consecutive packets at a UE falls within the interval [0, ∆
t], where ∆
t represents the time difference between
t2 −
L and the time
at which
p1 is generated (see (26)).
can then be expressed as:
As shown in (25) and (26), the negative effect of self-collisions increases with the value of K, since K influences the time a packet might be stored until the transmission of the previous packet is finished. However, increasing the number K of replicas transmitted for each packet is preferred, in order to combat possible collisions with other UEs sharing the same pool of radio resources. The next section will analyze both the effect of collisions from other UEs and the effect of self-collisions to analyze the reliability achievable with the grant-free scheduling with K-repetitions and shared radio resources.
5. Performance Evaluation
This section evaluates the capacity of 5G NR grant-free scheduling with
K-repetitions and shared resources to meet the reliability and latency requirements of URLLC services. To this aim, we use the analytical expressions that are derived in
Section 3 and were validated in the previous section. Reliability for URLLC services is defined as the percentage
of data packets that are successfully received by the BS before the latency deadline established by the service or application. In this study, we analyze first the reliability, considering only the effect of collisions from other UEs. This study analyzes then the impact of self-collisions on the capacity of 5G NR grant-free scheduling with
K-repetitions and shared resources to achieve the reliability levels demanded by URLLC services. This is particularly relevant, as this study extends the state of the art by evaluating the capacity of 5G NR grant-free scheduling to sustain reliability levels even higher than 1–10
−9. This study also evaluates the performance of 5G NR grant-free scheduling as a function of the number of UEs, the number of reserved radio resources, and the number
K of replicas.
The performance of 5G NR grant-free scheduling is evaluated considering a single cell with
N UEs. Packets are generated by each UE following a Poisson process with exponentially inter-arrival time. The average packet inter-arrival time is equal to 1/
λ, where
λ is the average number of packets generated per second. UEs transmit small packets with a size of 32 bytes [
22]. Radio resources are divided in 6 × 12 subcarriers (i.e.,
U = 6) with a subcarrier spacing of 120 kHz (i.e.,
= 0.125 ms).
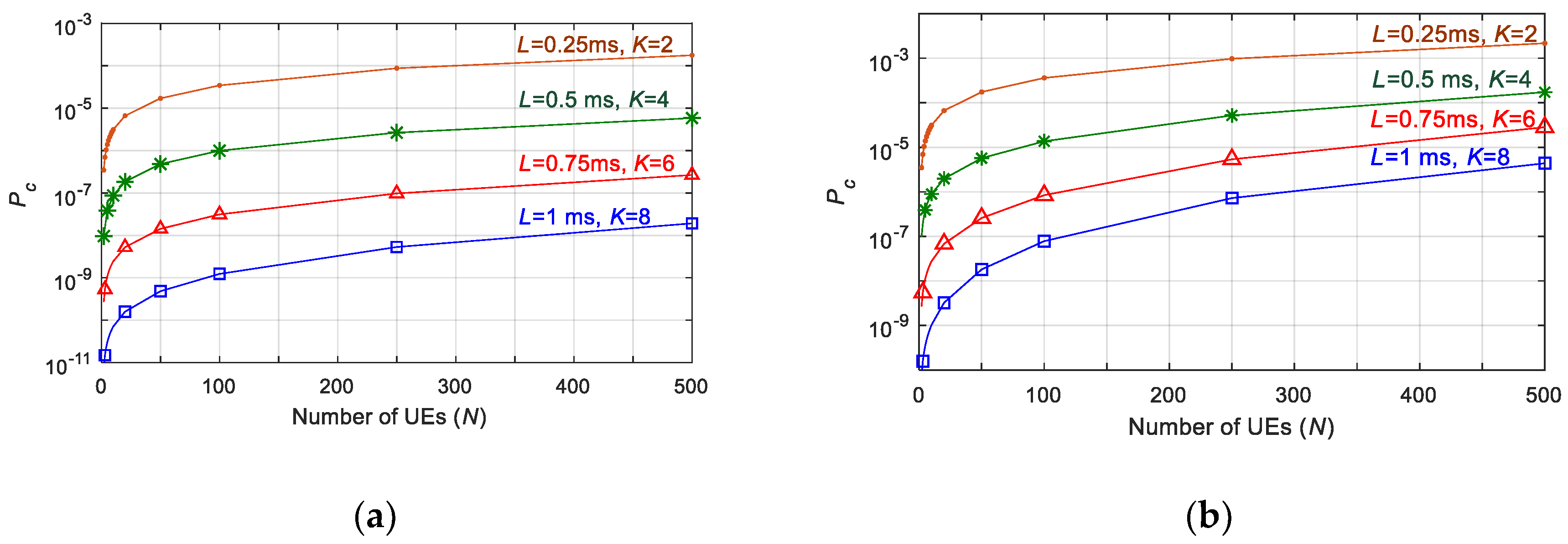
Figure 4 shows the probability
that a packet is not correctly received at the BS due to the collisions from other UEs experienced by all of the replicas of a packet (This would correspond to the reliability achieved with 5G NR grant-free scheduling if there were no self-collisions, i.e.,
Psc = 0 and
Prel = 1 −
Pc). The figure shows the value of
that can be achieved as a function of the number of UEs for latency requirements (
L) of 0.25, 0.5, 0.75 and 1 ms. We focus on services with the most stringent latency requirements, given the challenge to satisfy high reliability levels when latency decreases [
23]. For each value of
L, the grant-free scheduling scheme is executed with the maximum possible number of replicas
K that can be transmitted within the required latency. For example, if the maximum latency
L that can be tolerated is equal to 1 ms, the maximum number of replicas
K that can be transmitted within 1 ms is equal to 8 (
L = 1 ms corresponds to 8
⋅ when
= 0.125 ms).
Figure 4 also shows the performance achieved for two values of
λ (0.1 and 1 packet(s)). The results depicted in
Figure 4 clearly show that reducing the probability
of not receiving a packet to values as low as 10
−9, (and hence reaching reliability levels of 1–10
−9 when the effect of self-collisions is not considered), can only be achieved with high values of
K and values of
L equal to 0.75 or 1 ms.
Figure 4 also shows that the probability
increases with the number of UEs, since the risk of collision is higher. As a result, the capacity of 5G NR grant-free scheduling to support high reliability levels is significantly decreased as the number of UEs to be supported increases.
Figure 4 also shows that the difficulty in supporting high reliability levels increases with
λ, since the probability
increases as a result of a higher risk of collision between UEs.
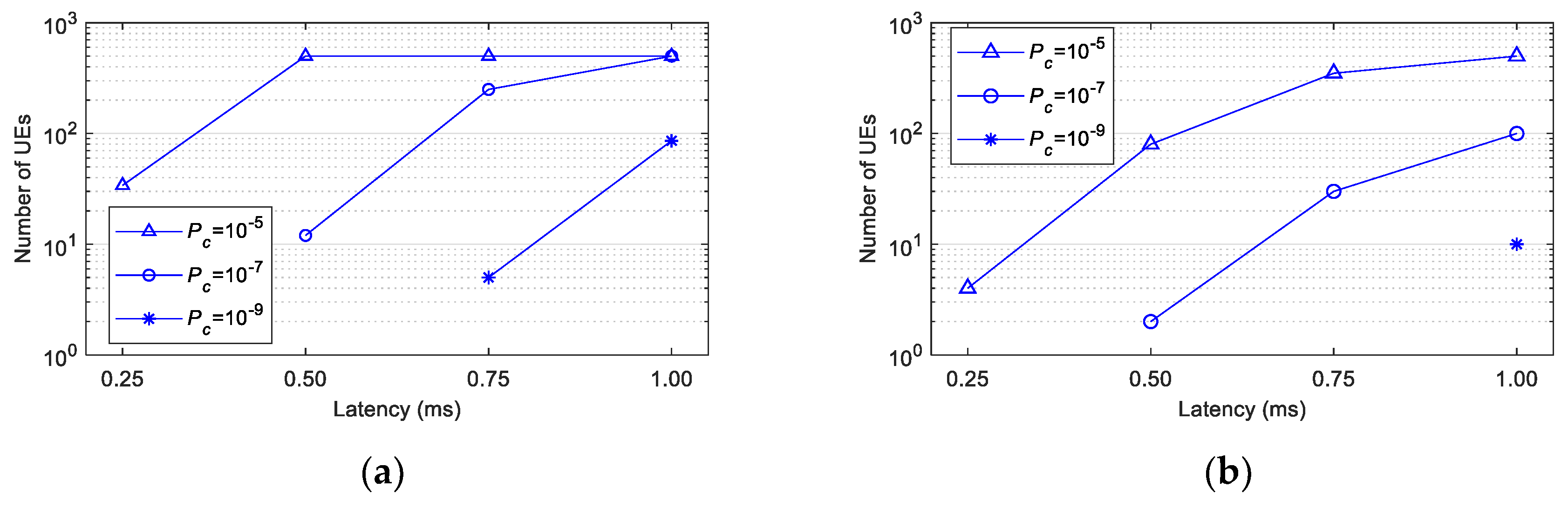
Figure 5 depicts the number of UEs that can be supported with a given latency requirement (
L) and a reliability of
when
0. It is important to remember that
L establishes the maximum number of replicas
K that can be transmitted. The results (the number of supported UEs) for each value of
L in
Figure 5 have been obtained for the maximum value of
K permitted by
L (
K equal to 2, 4, 6 and 8 for
L equal to 0.25, 0.5, 0.75 and 1 ms, respectively). The Release 15 of the 3GPP standards [
22] establishes URLLC requirements with a latency of
L = 1 ms and a reliability target of 1–10
−5.
Figure 5 shows that grant-free scheduling with
K-repetitions and shared resources can achieve a reliability equal to 1–10
−5 with only
K = 2 if we do not consider self-collisions. Grant-free scheduling with
K = 2 can also guarantee a latency as low as 0.25 ms. For low values of the packet generation rate (i.e.,
λ = 0.1 packets), grant-free scheduling with 2 repetitions can support up to 34 UEs with a reliability of 1–10
−5 and
L = 0.25 ms if we do not consider self-collisions. The number of UEs that can be supported decreases with
λ, since the risk of collision with other UEs increases when each UE transmits more packets per second. For example, only 4 UEs can be supported with
L = 0.25 ms and a reliability of 1–10
−5 when
λ = 1 packet. If the latency requirement is relaxed to 0.5 ms or even higher, grant-free scheduling can support more than 500 UEs with only
K = 4 when
λ = 0.1 packets. If
λ increases, grant-free scheduling can only guarantee the required reliability for 500 UEs if the latency requirement is 1 ms, and each UE can transmit 8 replicas of the same packet. These results show that the reliability and latency levels that can be achieved with grant-free scheduling depend upon configuration parameters (e.g.,
K), the traffic (e.g.,
λ) and the number of UEs supported. An adequate configuration and optimization of grant-free scheduling based on the network conditions could help support stringent reliability and latency levels. However, it is important to note that these results are achieved without considering self-collisions. The impact of self-collisions might be non-negligible when, for example,
K and/or
λ increase.
The Release 16 of 3GPP standards for 5G NR [
2] defines use cases with higher reliability requirements (up to 1–10
−6). Some Industry 4.0 applications (e.g., factory automation) require even higher reliability levels (up to 1–10
−9), as discussed in [
3]. It is then important analyzing whether grant-free scheduling with
K-repetitions and shared resources can guarantee reliability levels of the order of 1–10
−9.
Figure 4 and
Figure 5 show that grant-free scheduling can only guarantee very high reliability levels with high values of
K, which limits the latency requirements (
L) that can be satisfied. For example, a probability to correctly receive a packet equal to 1–10
−7 cannot be guaranteed when
L < 0.5 ms, even for the lower packet generation rates. If the reliability requirement increases to
1–10
−9, grant-free scheduling can only support 5 UEs with
L = 0.75 ms and
λ = 0.1 packets. It can support 86 UEs if the latency requirement is relaxed to 1 ms. However, if
λ increases to 1 packet then grant-free scheduling can only support 10 UEs with a reliability of 1–10
−9 even if
L is equal to 1 ms.
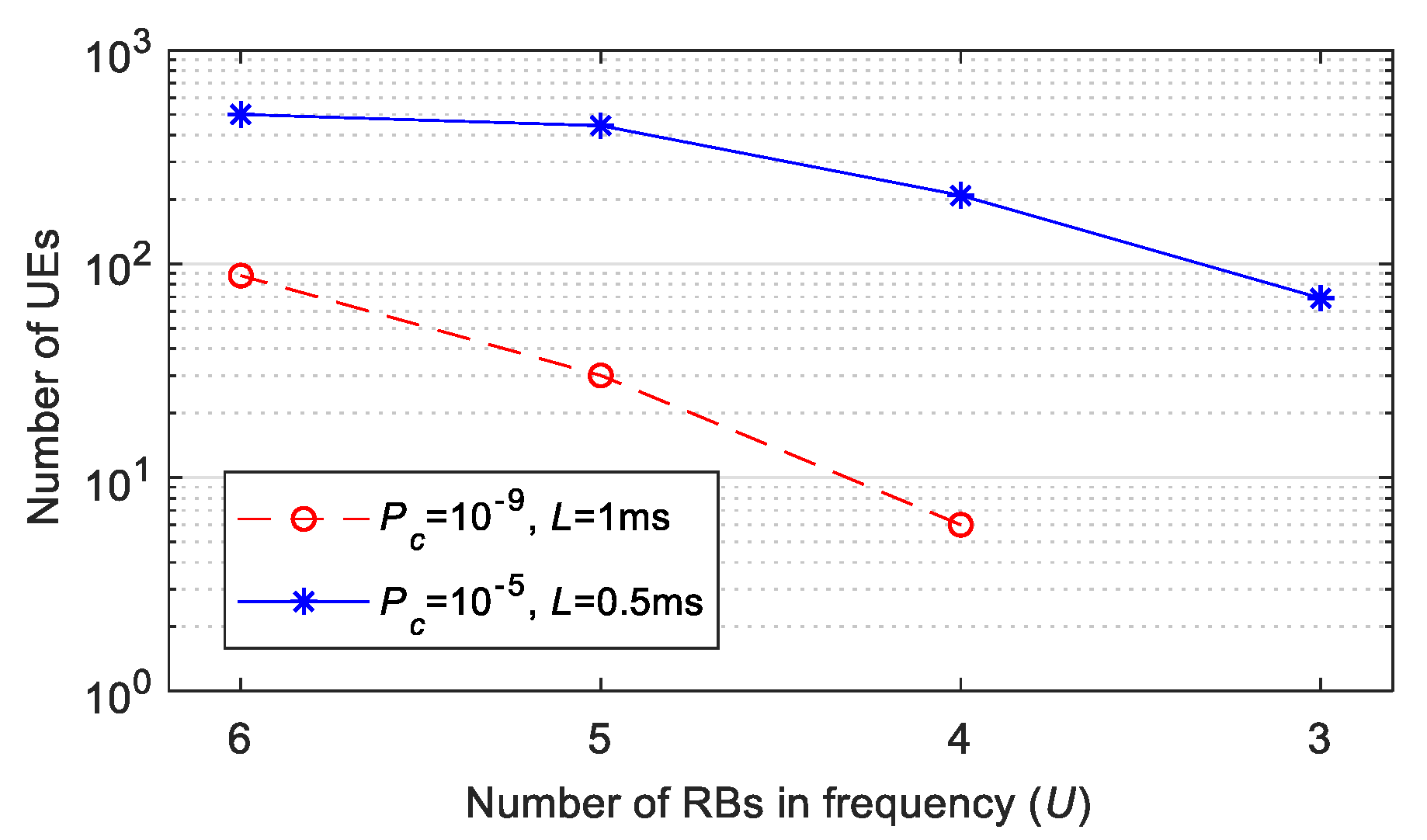
Figure 6 shows the impact of
U upon the performance of the grant-free scheduling scheme with
K-repetitions and shared resources.
U is the number of available RBs (Resource Blocks) per
. In particular,
Figure 6 depicts the number of UEs that can be supported with a given reliability and latency
L when
U decreases and
λ is set equal to 0.1 packets (the reliability is equal to
Prel = 1 −
Pc when the effect of self-collisions is not taken into account, i.e.,
Psc = 0).
Figure 6 shows that the number of UEs that grant-free scheduling with
K-repetitions can support for a given set of requirements strongly depends upon the number of RBs available. UEs randomly select an RB for each transmission from the
U RBs available per slot. The probability that several UEs select the same RB for their transmissions increases when the number of RBs per slot decreases. Consequently, the probability
that a packet is not correctly received due to packet collisions, increases. In addition, the number of UEs that can achieve a target reliability level also decreases when the number of RBs per slot decreases. For example, 443 UEs can be supported with
L = 0.5 ms (and hence
K = 4) and
= 10
−5 when
U is equal to 5 RBs. This number decreases to 69 UEs when
U decreases to 3 RBs. This is a significant reduction of 84%. This reduction increases when the reliability demand increases. For example, 86 UEs can be supported with
= 10
−9 and
L = 1 ms (and hence
K = 8) when
U is equal to 6. However, only 6 UEs can achieve these values of
and
L if
U decreases to 4 (i.e., a 93% reduction).
All previous results have been derived without considering the effect of self-collisions. Self-collisions were illustrated in
Figure 2, and the probability of self-collision was derived in
Section 3.2. As previously described, if a packet
p2 is generated before the
K replicas of the previous packet
p1 have been transmitted,
p2 will be stored and transmitted after completing the transmission of the
K replicas of
p1. Due to the time that
p2 is stored, the transmission of its
K replicas may finish after the latency deadline
L. As presented in
Section 3.2, it is not possible to complete the transmission of the
K replicas of
p2 before the latency deadline
L if
p2 is generated before
t2 −
L (
t2 is the time at which the transmission of the
K replicas of
p2 is finished as shown in
Figure 2). This results in that the probability
(the probability that the transmission of
K replicas of a packet is not completed before
L due to the effect of self-collisions) is equal to the probability that the time between the generation of two consecutive packets at a UE falls within the interval [0, ∆
t], where ∆
t represents the time difference between
t2 −
L and the time
at which
p1 is generated (see (25) and (26)).
We consider that packets are generated following a Poisson process with exponential inter-arrival time. As a result, ∆
t is homogeneously distributed between ∆
t1 and ∆
t2. For
K = 4 in
Figure 2, ∆
t1 is equal to 0 and ∆
t2 is equal to
, since
p1 can be homogeneously generated between
t0 and
t0 −
When
K = 6, ∆
t1 is equal to 4
, and ∆
t2 is equal to (4+1)
, since
p1 can be homogeneously generated between
t0 and
t0 −
Similarly, ∆
t1 and ∆
t2 are equal to 8
and (8+1)
for
K = 8.
Table 1 shows the value of
given in (26) when ∆
t is equal to ∆
t1 or ∆
t2 considering
L = 1 ms and
K = 4, 6 and 8. ∆
t = ∆
t1 corresponds to the scenario where self-collisions are less probable, while ∆
t = ∆
t2 corresponds to the case in which they are more probable.
The results in
Table 1 show that the probability of self-collision is non-negligible. For example,
can reach values equal to 1.25 × 10
−4 and 9.99 × 10
−4 when
K is equal to 4 and 8, respectively, and
λ = 1 packet. It is also important to highlight that a comparison of results in
Figure 4 and
Table 1 shows that
can be actually higher than
This is for example the case when
K = 8:
is lower than 10
−7 and 10
−5 for
λ equal to 0.1 and 1 packet(s), respectively (
Figure 4), while
is approximately equal to 10
−4 and 10
−3 (
Table 1). Grant-free scheduling can hence be limited by the effect of self-collisions, in particular when
K increases. It is then important that the reliability (or probability that a packet is correctly received before the latency deadline) of grant-free scheduling with
K-repetitions and shared radio resources is computed considering both the effect of collisions from other UEs and the effect of self-collisions following (1).
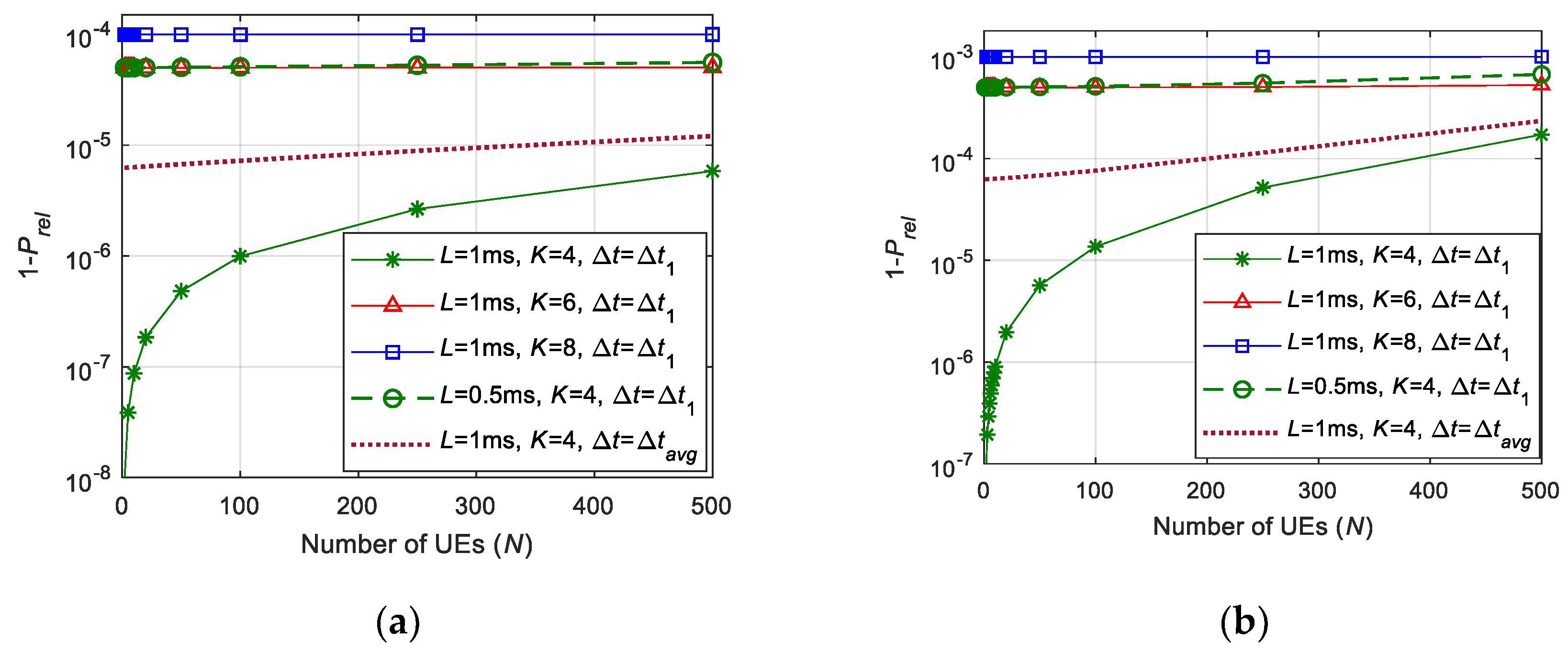
Figure 7 plots 1 −
for different values of
K and
L when considering both
and
. The results are plotted considering ∆
t = ∆
t1 for computing
. ∆
t = ∆
t1 corresponds to the case where self-collisions are less probable.
Figure 4 shows that it is necessary to transmit a high number of replicas
K within
L to combat collisions from other UEs and correctly receive a packet at the BS. For example,
Figure 4 shows that
K must be equal to 8 in order to achieve
= 1–10
−9 when
= 0 and
λ is equal to 1 packet. However,
Table 1 showed that the effect of self-collisions increases with
K even to the point that self-collisions limit the reliability that can be achieved. This is actually shown in
Figure 7 when we consider
L = 1 ms. In principle, it could be possible to satisfy a 1 ms latency requirement if we transmit 4, 6 or 8 replicas of a packet.
Figure 7 shows that if
K = 4 and ∆
t = ∆
t1 (for computing
in (26)), the impact of self-collisions is not relevant, and the reliability levels of 1–10
−5 can be satisfied for more than 500 UEs and 80 UEs when
λ is equal to 0.1 and 1 packet(s), respectively; these results are in line with those observed in
Figure 4 for
K = 4. However, when
K is equal to 6 or 8, the effect of self-collisions becomes more relevant (
Table 1), and
Figure 7 shows that it can actually limit the maximum reliability that can be achieved independently of the number of UEs. In fact, the maximum reliability that can be achieved is approximately equal to 1 −
. In this case, for
K = 8 and
λ = 1 packet/s, the maximum reliability (when
is computed considering ∆
t = ∆
t1) that can be achieved is 1–10
−3 when the latency requirement
L is equal to 1 ms. It should be noted that reliability levels even higher than 1 −
= 1–10
−9 were achieved when the effect of self-collisions was not considered (
Figure 4). The results discussed so far correspond to the scenario where
has been computed considering ∆
t = ∆
t1. This corresponds to the scenario where self-collisions are less probable.
Figure 7 also shows the reliability that can be achieved with
L = 1 ms and
K = 4 when ∆
t = ∆
tavg. This ∆
tavg is the average value of ∆
t. ∆
tavg = (∆
t1 + ∆
t2)/2, since ∆
t is homogeneously distributed between ∆
t1 and ∆
t2.
Figure 7 shows that in this case it is not possible to achieve a reliability higher than 1–6.3 × 10
−5 and 1–6.3 × 10
−4 when
λ is equal to 0.1 and 1 packet(s).
Figure 7 also shows that the reliability becomes again nearly independent of the number of UEs that are being supported. The degradation of reliability experienced from ∆
t = ∆
t1 to ∆
t = ∆
tavg is again due to a major relevance of the effect of self-collisions when we compute the reliability.
Expressions in (25) and (26) show that
also depends upon the latency requirement
L. The effect of self-collisions is more relevant when the latency requirement is stricter. For example,
Figure 7 shows that the effect of self-collisions already limits the maximum reliability that can be achieved when
K = 4 if the latency requirement is equal to 0.5 ms. Latency requirements significantly influence the reliability levels that can be satisfied. This is the case because latency requirements limit the number
K of replicas that can be sent for each packet.
Figure 4 shows that the maximum reliability level that can be guaranteed depends on the latency requirements when only considering
.
Figure 7 also shows that the effect of self-collisions becomes more relevant with stricter latency requirements. These results show that it is a challenge guaranteeing high reliability demands with very low latency levels.
The results in
Figure 7 demonstrate that current 5G NR grant-free scheduling with
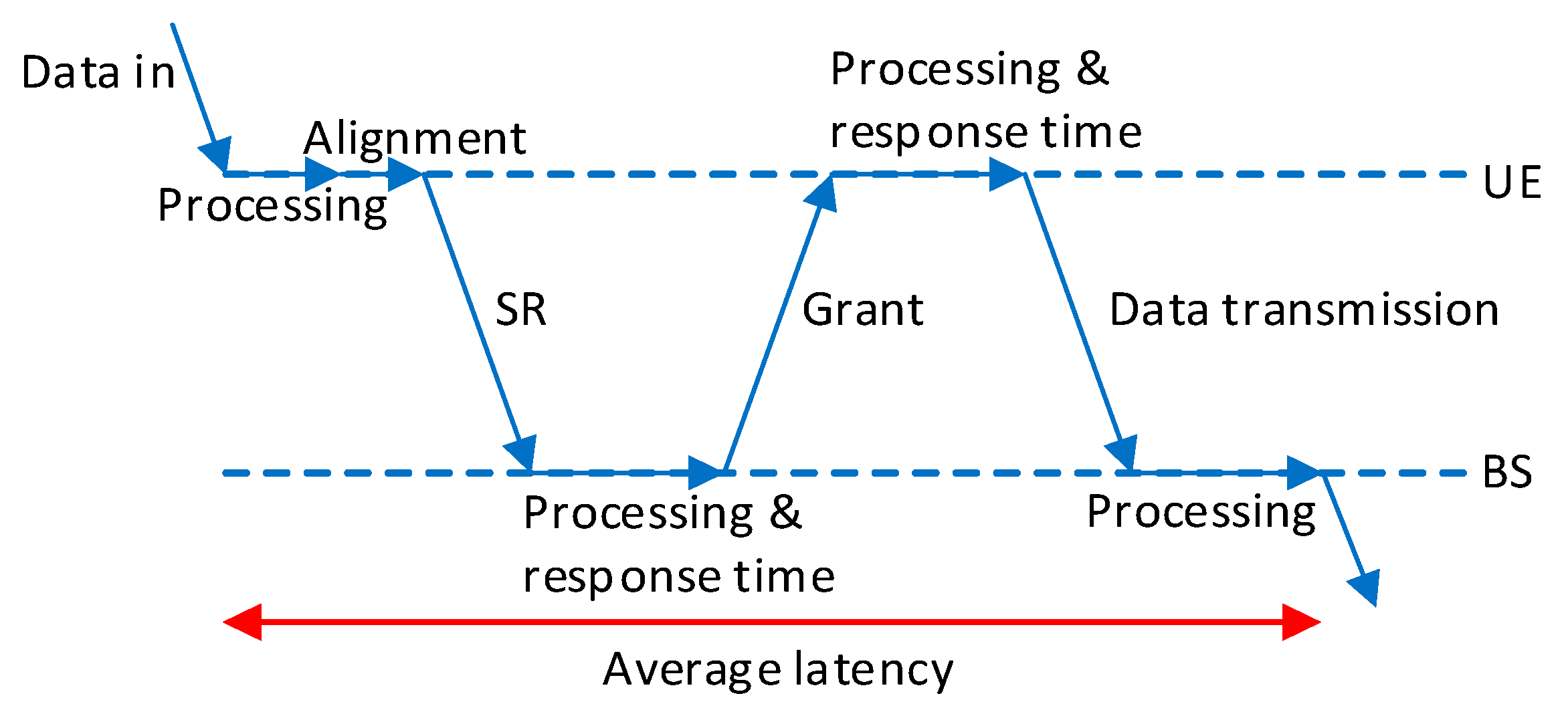
K-repetitions and shared resources cannot guarantee some of the more demanding reliability and latency levels. However, it is important emphasizing that other proposals cannot meet such requirements either, and these actually perform worse than the implementation analyzed in this study. This is actually the case for the proposals that transmit the first copy of a packet in dedicated resources for the UEs. These resources can be reserved using grant-based scheduling (such as in [
14]) or semi-persistent scheduling (such as in [
13]). Grant-based scheduling requires the UE to send an SR to the BS, and wait for the BS to reply with a grant message. The exchange of these messages between the UE and the BS is illustrated in
Figure 8 This handshaking generates a non-negligible
Ttotal latency that is equal to:
where
TL1/L2 is the
L1/
L2 processing latency at the BS and the UE,
Talign is the alignment latency (the alignment latency is the time elapsed from the moment the UE is ready to transmit to the actual time the transmission starts),
Tproc is the processing latency (this latency represents the latency between the reception of the SR and the transmission of the grant message), and
Ttx is the time required to transmit the SR and grant messages. Following [
24], we consider
TL1/L2 =
Talign =
Ttx = 1 TTI, and
Tproc = 2.33 TTI. These values are a best-case scenario, since they represent reduced processing times that can be achieved with 3GPP Release 15 compared to Release 14. Equation (27) shows that the total latency (2.3 ms) introduced by the grant-based scheduling process to assign dedicated resources to UEs is higher than the latency achieved with the 5G NR grant-free scheduling implementation analyzed in this study. For example,
Figure 7 shows that this implementation can guarantee latency levels below 1 ms (this latency is guaranteed with a reliability up to 1–10
−5 when
K = 4,
λ = 0.1 packets,
U = 6, and ∆
t = ∆
tavg).
The alternative to grant-based scheduling is Semi-Persistent Scheduling (SPS). In this case, UEs are assigned dedicated resources for a period of time. During this period, UEs can utilize the resources without requesting permission from the BS. This avoids the latency introduced by grant-based scheduling. However, semi-persistent scheduling inefficiently utilizes the radio resources when the traffic is aperiodic. This is the case, because it is not possible to predict when UEs will need resources. To illustrate this effect, let us consider a scenario with
N = 300 users that generate aperiodic traffic (
λ = 0.1 packets). We shall then suppose that users request a maximum latency of 1 ms and a reliability level equal to 1–10
−5. Satisfying this demand requires reserving 300 RBs (one per UE) in a 1 ms time windowA lower number of resources would be necessary if traffic was periodic and we could estimate when each UE would require resources for their transmission. In this case, several UEs could share the same RB if they generate their packets at different time instants. This would reduce the total number of RBs necessary to serve all users. This is not possible in the case of aperiodic traffic, since we cannot predict when a UE would need radio resources.
Figure 7 shows that our implementation of 5G NR grant-free scheduling with 4-repetitions and shared resources can support 300 UEs (with their latency and reliability demands) with only 48 RBs in a time window of 1 ms. This is 84% less radio resources than if we reserve dedicated resources per UE (with aperiodic traffic) for their first transmission using semi-persistent scheduling. These results clearly show that the implemented 5G NR grant-free scheduling with shared resources can better support URLLC applications with aperiodic traffic and stringent communication requirements than other existing proposals. However, the conducted analysis (e.g.,
Figure 7) has also shown that new solutions will be needed to guarantee very demanding reliability and latency levels such as those foreseen for some URLLC services in 3GPP Release 16.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}