Underwater Spiral Wave Sound Source Based on Phased Array with Three Transducers

 ,
,
Abstract
1. Introduction
2. The Generation of a Spiral Wave Field
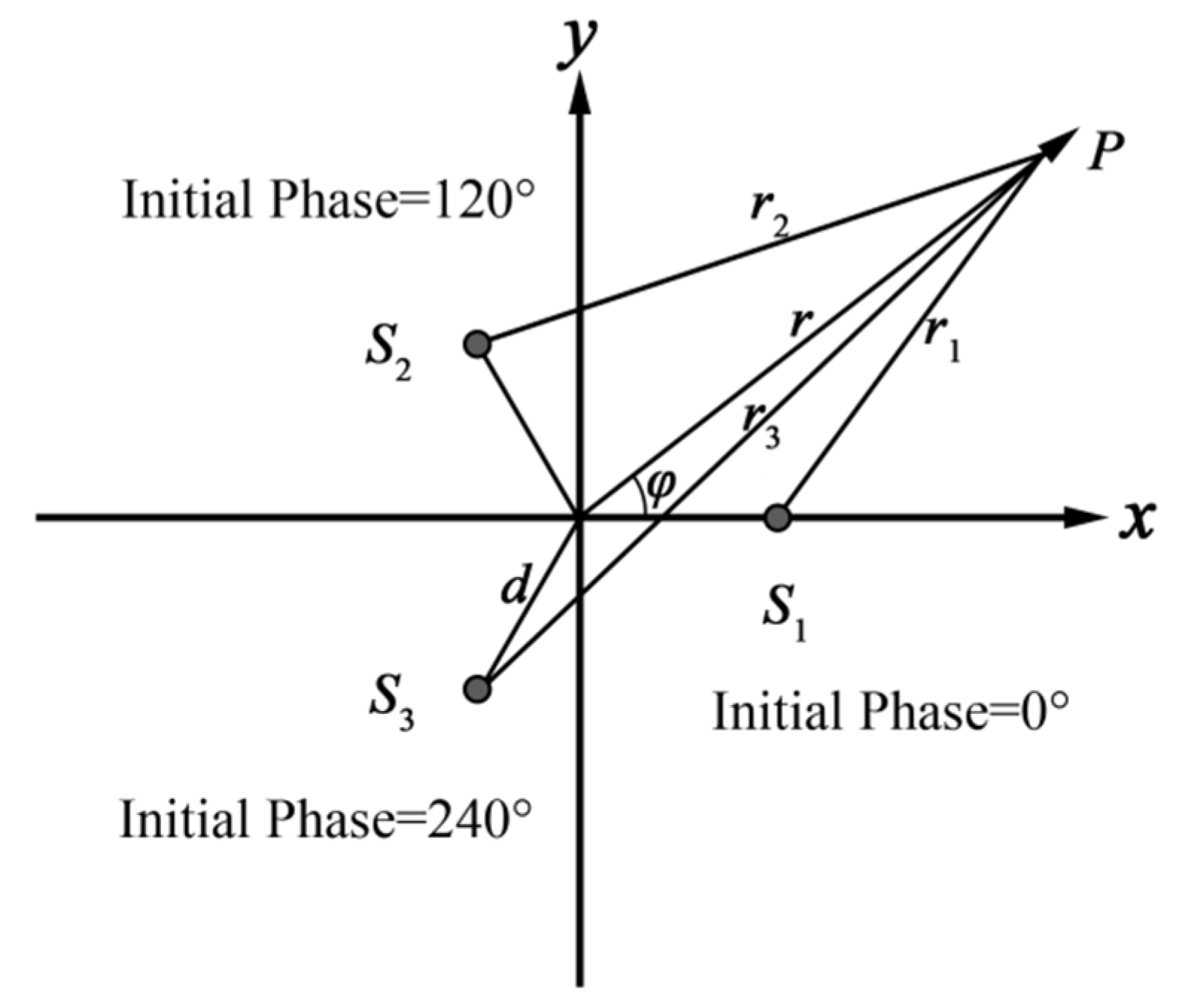
2.1. Sound Pressure Field Produced by Phased Array with Three Transducers
2.2. The Performance of the Spiral Sound Field
2.3. Finite Element Simulation of Phased Array
3. Spiral Sound Source Based on Phased Array
3.1. Basic Structure of Spiral Sound Source
3.2. Finite Element Simulation of the Spiral Sound Source
4. Measurement of the Spiral Wave Source
4.1. Measuring Principle of Phase Directivity
4.2. Test Results of the Spiral Sound Source
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dzikowicz, B. Underwater Acoustic Beacon and Method of Operating Same for Navigation. U.S. Patent 7,406,001 B1, 29 July 2008. [Google Scholar]
- Dzikowicz, B.R.; Hefner, B.T.; Leasko, R.A. Underwater Acoustic Navigation Using a Beacon with a Spiral Wave Front. IEEE J. Ocean. Eng. 2015, 40, 177–186. [Google Scholar] [CrossRef]
- Dzikowicz, B.R.; Hefner, B.T. Aspect determination using a transducer with a spiral wavefront: Prototype and experimental results. J. Acoust. Soc. Am. 2009, 125, 2540. [Google Scholar] [CrossRef]
- Hefner, B.T.; Dzikowicz, B.R. A spiral wave front beacon for underwater navigation: Basic concept and modeling. J. Acoust. Soc. Am. 2011, 129, 3630–3639. [Google Scholar] [CrossRef] [PubMed]
- Dzikowicz, B.R.; Hefner, B.T. A spiral wave front beacon for underwater navigation: Transducer prototypes and testing. J. Acoust. Soc. Am. 2012, 131, 3748–3754. [Google Scholar] [CrossRef] [PubMed]
- Brown, D.A.; Aronov, B.; Bachand, C. Cylindrical transducer for producing an acoustic spiral wave for underwater navigation (L). J. Acoust. Soc. Am. 2012, 132, 3611–3613. [Google Scholar] [CrossRef] [PubMed]
- Brown, D.A.; Aronov, B.; Bachand, C.L. Acoustic Transducers for Underwater Navigation and Communication. U.S. Patent 8,638,640 B2, 28 January 2014. [Google Scholar]
- Brown, D.; Bachand, C.; Aronov, B. Design, development and testing of transducers for creating spiral waves for underwater navigation. J. Proc. Meet. Acoust. 2013, 19, 030089. [Google Scholar]
- Lu, W.; Lan, Y.; Guo, R.Z.; Zhang, Q.C.; Li, S.C.; Zhou, T.F. Spiral Sound Wave Transducer Based on the Longitudinal Vibration. Sensors 2018, 18, 3674. [Google Scholar] [CrossRef] [PubMed]
- Spies, M. Transducer-modeling in general transversely isotropic media via point-source-synthesis: Theory. J. Nondestruct. Eval. 1994, 13, 85–99. [Google Scholar] [CrossRef]
- Yanagita, T.; Kundu, T.; Placko, D. Ultrasonic field modeling by distributed point source method fordifferent transducer boundary conditions. J. Acoust. Soc. Am. 2009, 126, 2331–2339. [Google Scholar] [CrossRef] [PubMed]
- Lin, M.-R.; Ward, C.A. Superposition of the modes of sound propagation in rarefied gases. J. Phys. Fluids 1975, 18, 1100–1108. [Google Scholar] [CrossRef]
- Li, J.Q.; Chen, J.; Yang, C. Wave superposition based sound field reconstruction. J. Shanghai Jiaotong Univ. 2008, 13, 381–384. [Google Scholar] [CrossRef]
- Shevtsova, M.; Nasedkin, A.; Shevtsov, S.; Zhilyaev, I.; Chang, S. An optimal design of underwater piezoelectric transducers of new generation. In Proceedings of the 23rd International Congress On Sound And Vibration: From Ancient To Modern Acoustics, Athens, Greece, 10–14 July 2016. [Google Scholar]
- Jiang, R.; Mei, L.; Zhang, Q. COMSOL Multiphysics Modeling of Architected Acoustic Transducers in Oil Drilling. J. MRS Adv. 2016, 1, 1755–1760. [Google Scholar] [CrossRef]
- Dudziak, K.; Stawicki, K.; Brykalski, A. Optimization of the eddy current transducer using COMSOL Multiphysics® and MATLAB® software. J. ITM Web Conf. 2018, 19, 1004. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Theoretical Calculation | Finite Element Simulation | |
|---|---|---|
| Amplitude Directivity Range | 3.17 dB | 3.22 dB |
| Phase directivity Fluctuation Range | 20.39° | 20.82° |
| Name | Type | Number (pcs) |
|---|---|---|
| Signal Source | RIGOL DG4062 | 2 |
| Power Amplifier (1) | INSTRUMENTS Model L6 | 2 |
| Power Amplifier (2) | INSTRUMENTS Model L2 | 1 |
| Hydrophone | B&K 8105 | 2 |
| Oscilloscope | Tektronix DPO 2014 | 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, W.; Guo, R.; Lan, Y.; Sun, H.; Li, S.; Zhou, T. Underwater Spiral Wave Sound Source Based on Phased Array with Three Transducers. Sensors 2019, 19, 3192. https://doi.org/10.3390/s19143192
Lu W, Guo R, Lan Y, Sun H, Li S, Zhou T. Underwater Spiral Wave Sound Source Based on Phased Array with Three Transducers. Sensors. 2019; 19(14):3192. https://doi.org/10.3390/s19143192
Chicago/Turabian StyleLu, Wei, Rongzhen Guo, Yu Lan, Hao Sun, Shichang Li, and Tianfang Zhou. 2019. "Underwater Spiral Wave Sound Source Based on Phased Array with Three Transducers" Sensors 19, no. 14: 3192. https://doi.org/10.3390/s19143192
APA StyleLu, W., Guo, R., Lan, Y., Sun, H., Li, S., & Zhou, T. (2019). Underwater Spiral Wave Sound Source Based on Phased Array with Three Transducers. Sensors, 19(14), 3192. https://doi.org/10.3390/s19143192