Lane Detection Algorithm for Intelligent Vehicles in Complex Road Conditions and Dynamic Environments



Abstract
1. Introduction
2. Converting of Image Distortion
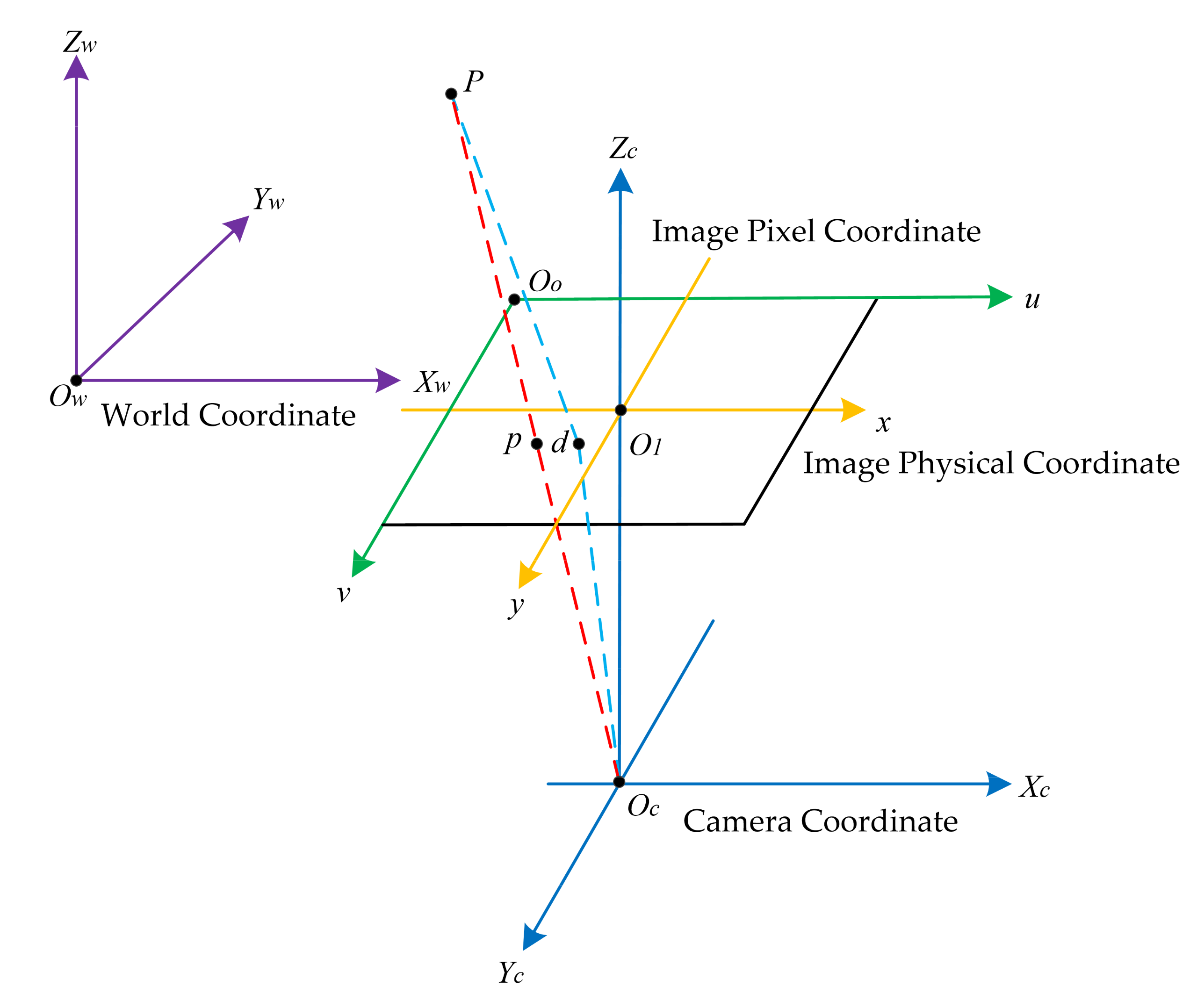
2.1. Camera Calibration
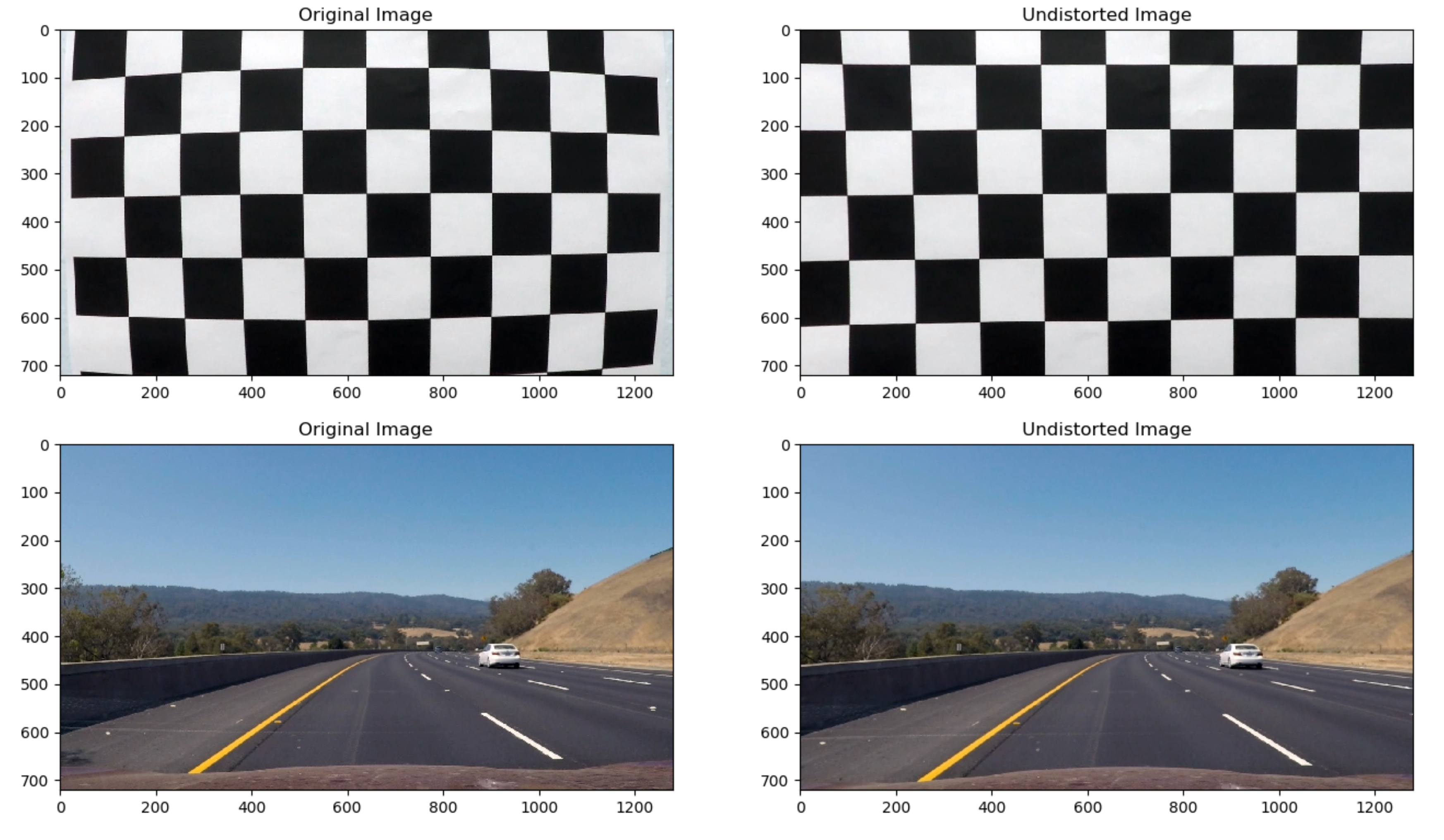
2.2. Image Distortion Removal
3. Edge Detection and Inverse Perspective Transformation
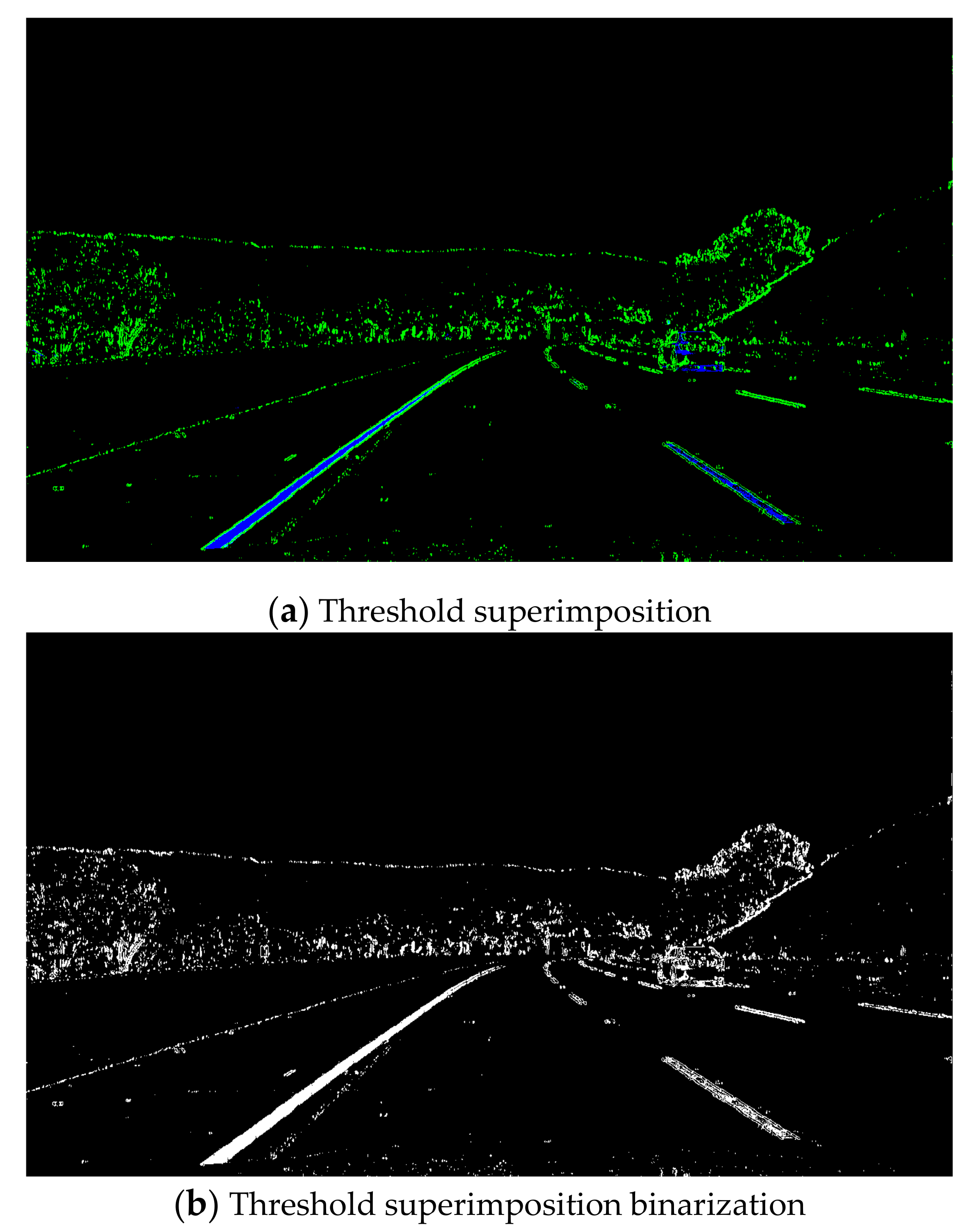
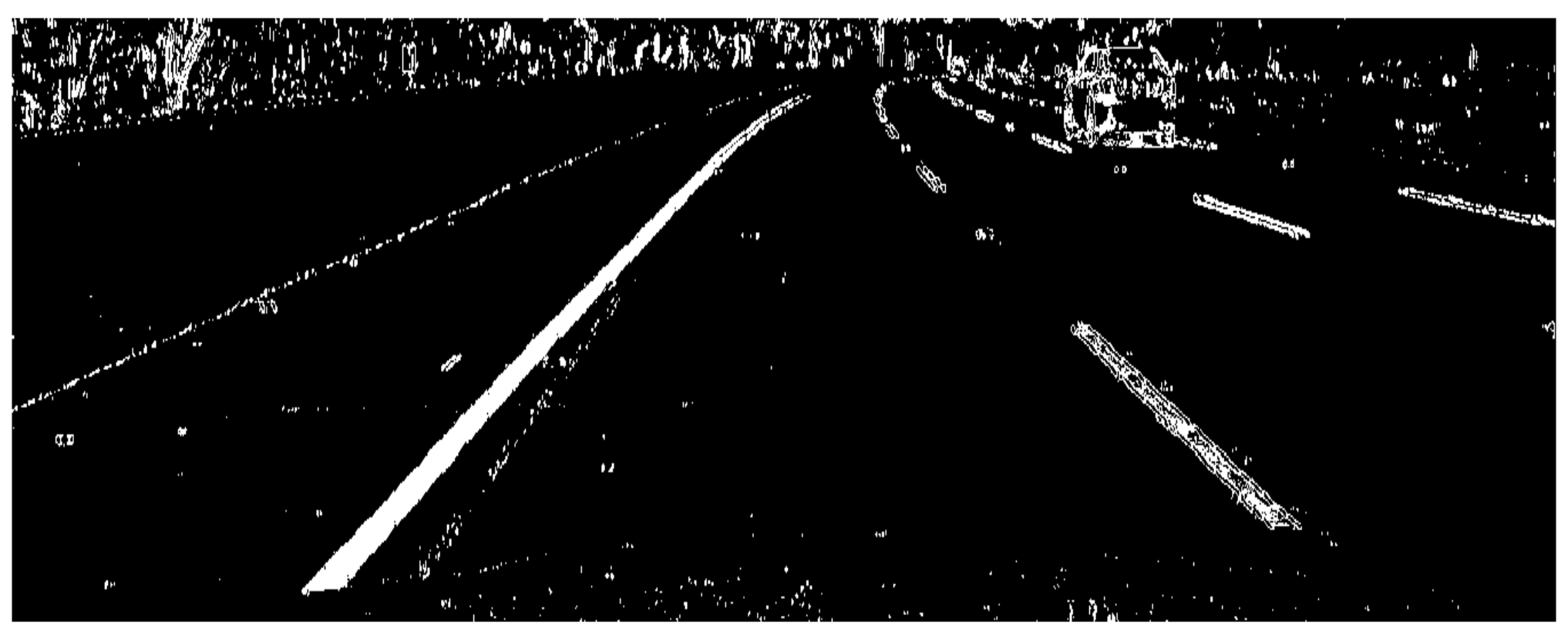
3.1. Edge Detection
3.2. Inverse Perspective Transformation
3.2.1. ROI Extraction
3.2.2. Inverse Perspective Transformation
4. Lane Detection
4.1. Mask Operation
4.2. Lane Detection Algorithm
4.2.1. Third-Order B-Spline Curve Model
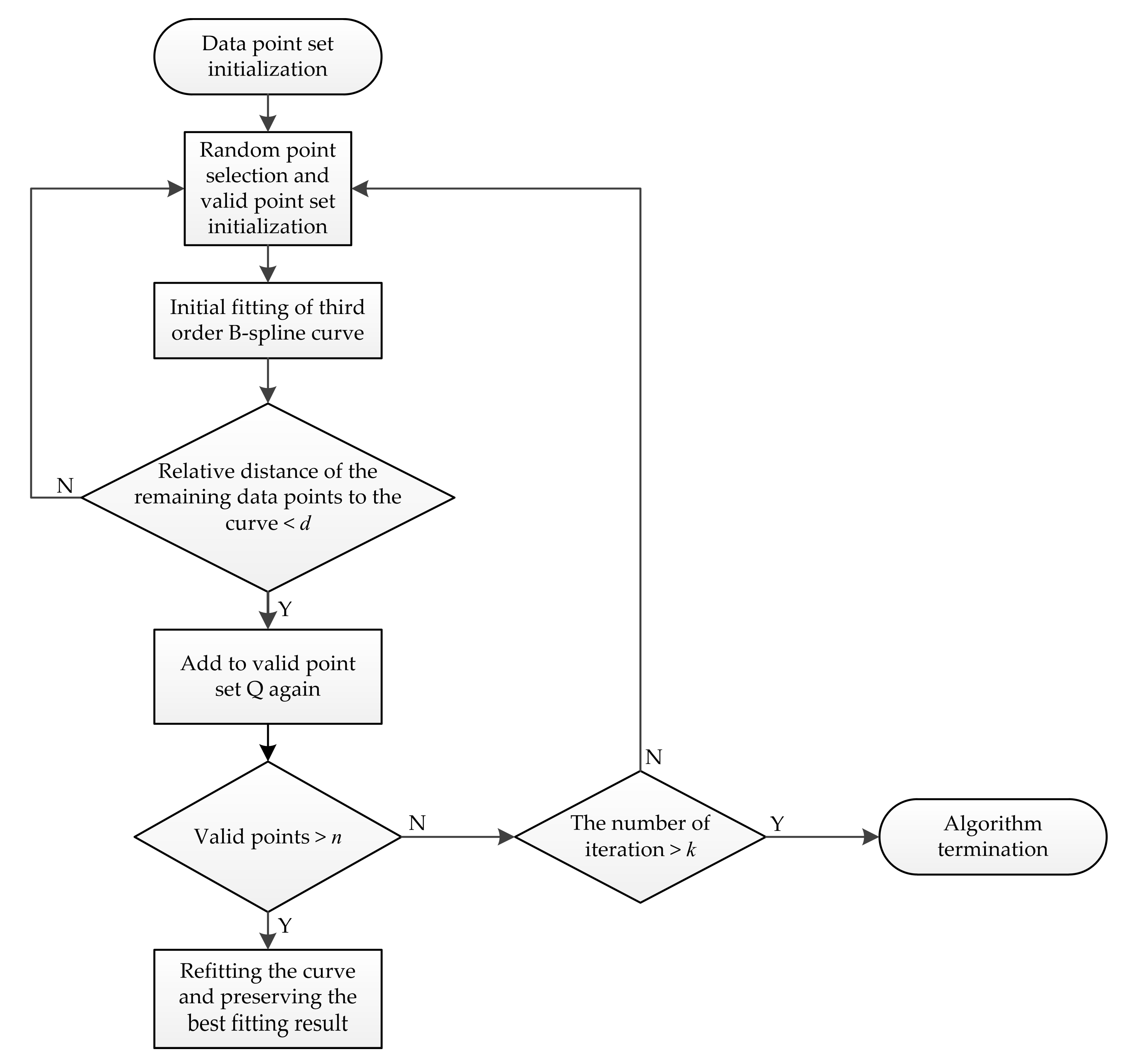
4.2.2. Lane Line Fitting Based on RANSAC Algorithm
- (1)
- Search for the pixel points whose grey value is not equal to 0 in the image to be detected, and the data point set S required by the algorithm is obtained.
- (2)
- According to the third-order B-spline curve model, randomly select four points as the initial valid points of curve fitting in the data point set S, and then an initial third-order B-spline curve is obtained.
- (3)
- Calculate the relative distance between the remaining data points and the initial third-order B-spline curve. Data points that do not exceed the distance threshold d are close to the fitting curve, and then the points are added to the valid point set Q as new valid points.
- (4)
- When the number of data points in the valid point set Q reaches the threshold number n of the valid points in the preset curve model, step (5) is executed. Otherwise, steps (2) and (3) are repeated until the number of valid points meets the requirements or the upper limit k of iteration times is reached.
- (5)
- The third-order B-spline curve is refitted by using the data points in the current valid point set Q, and the best curve fitting result is preserved. When the upper limit k of iteration times is reached, the algorithm terminates.
4.2.3. Lane Line Fitting Evaluation and Curvature Radius Calculation
4.3. Simulation Test Experiment
4.3.1. Test Environment
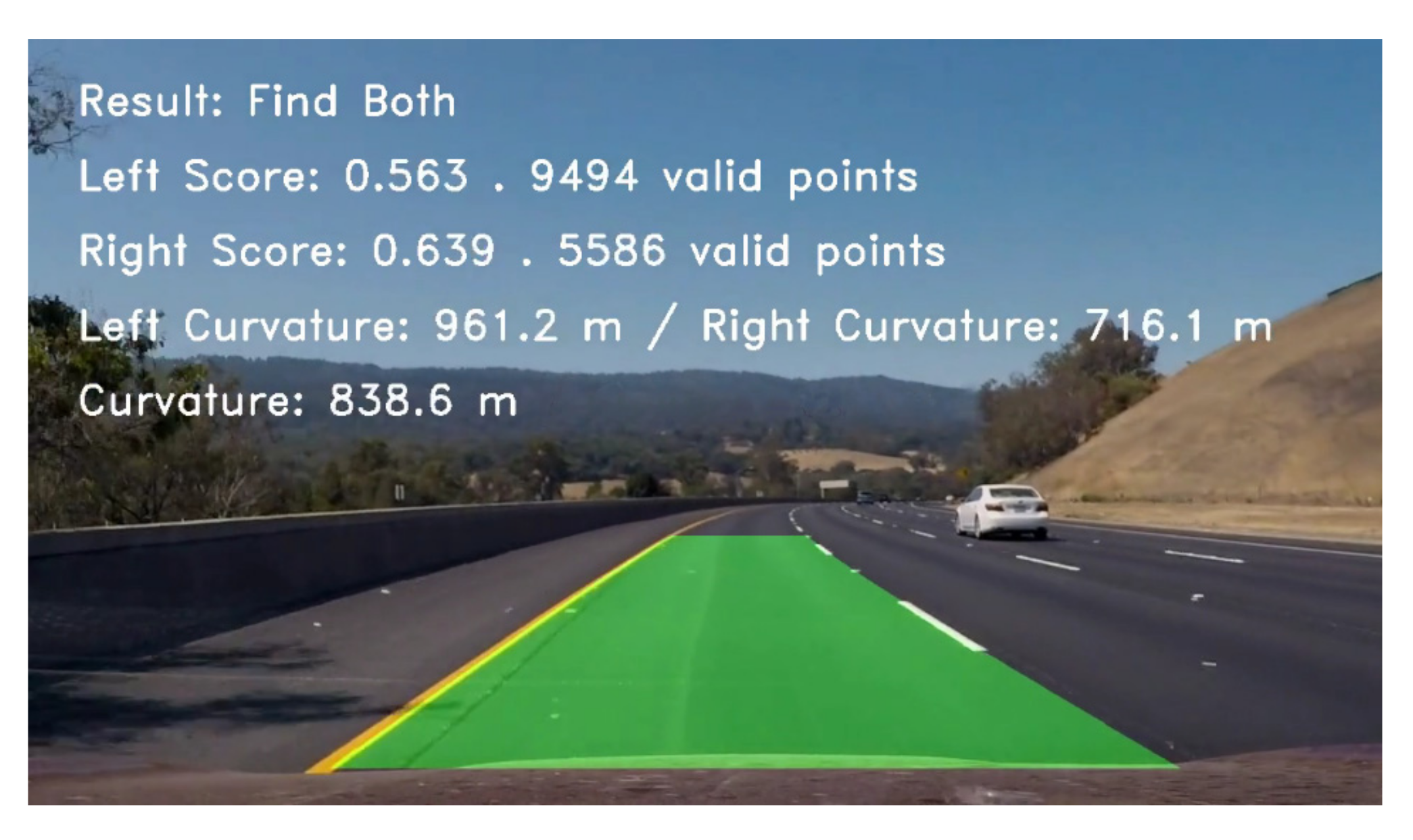
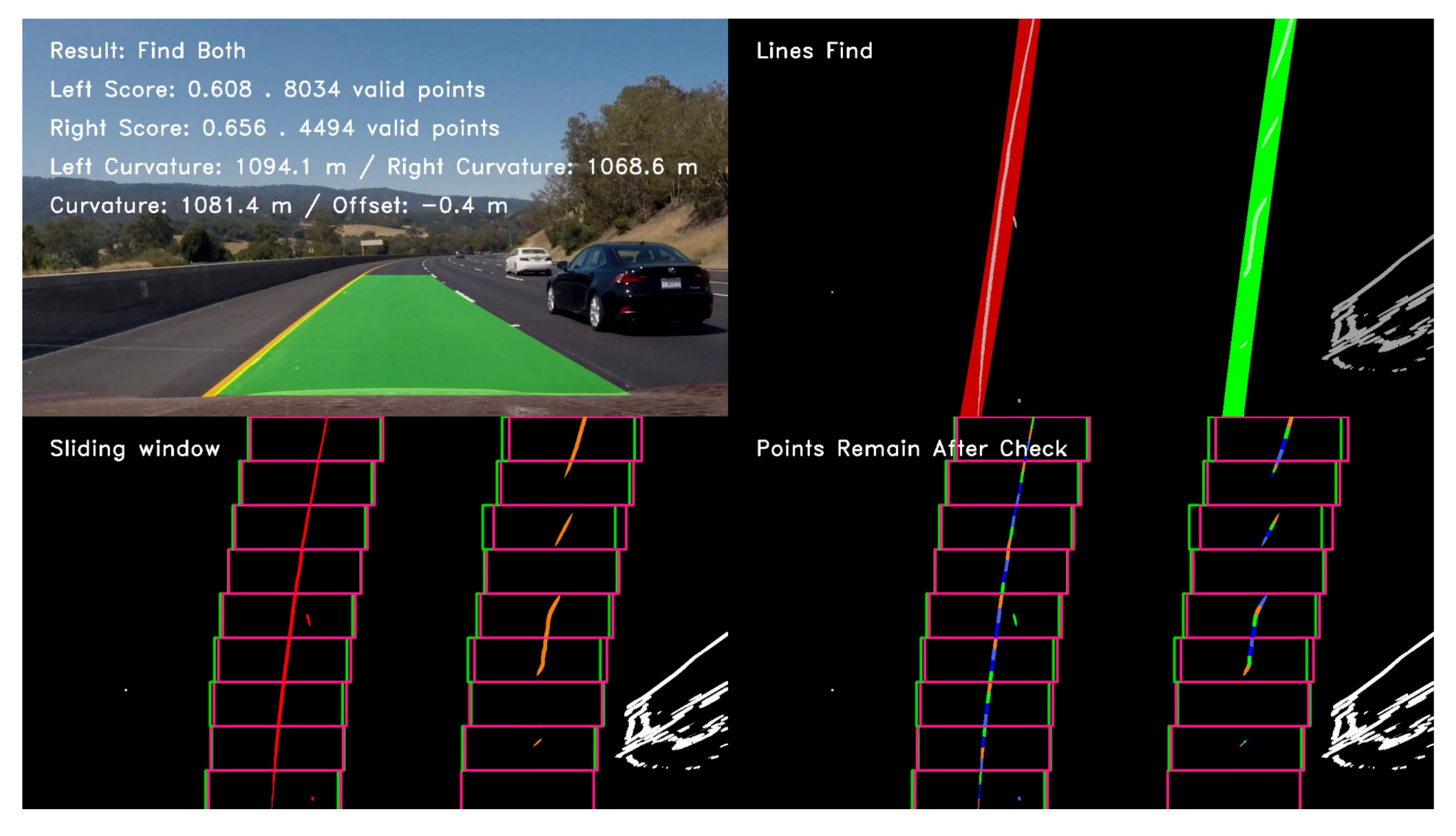
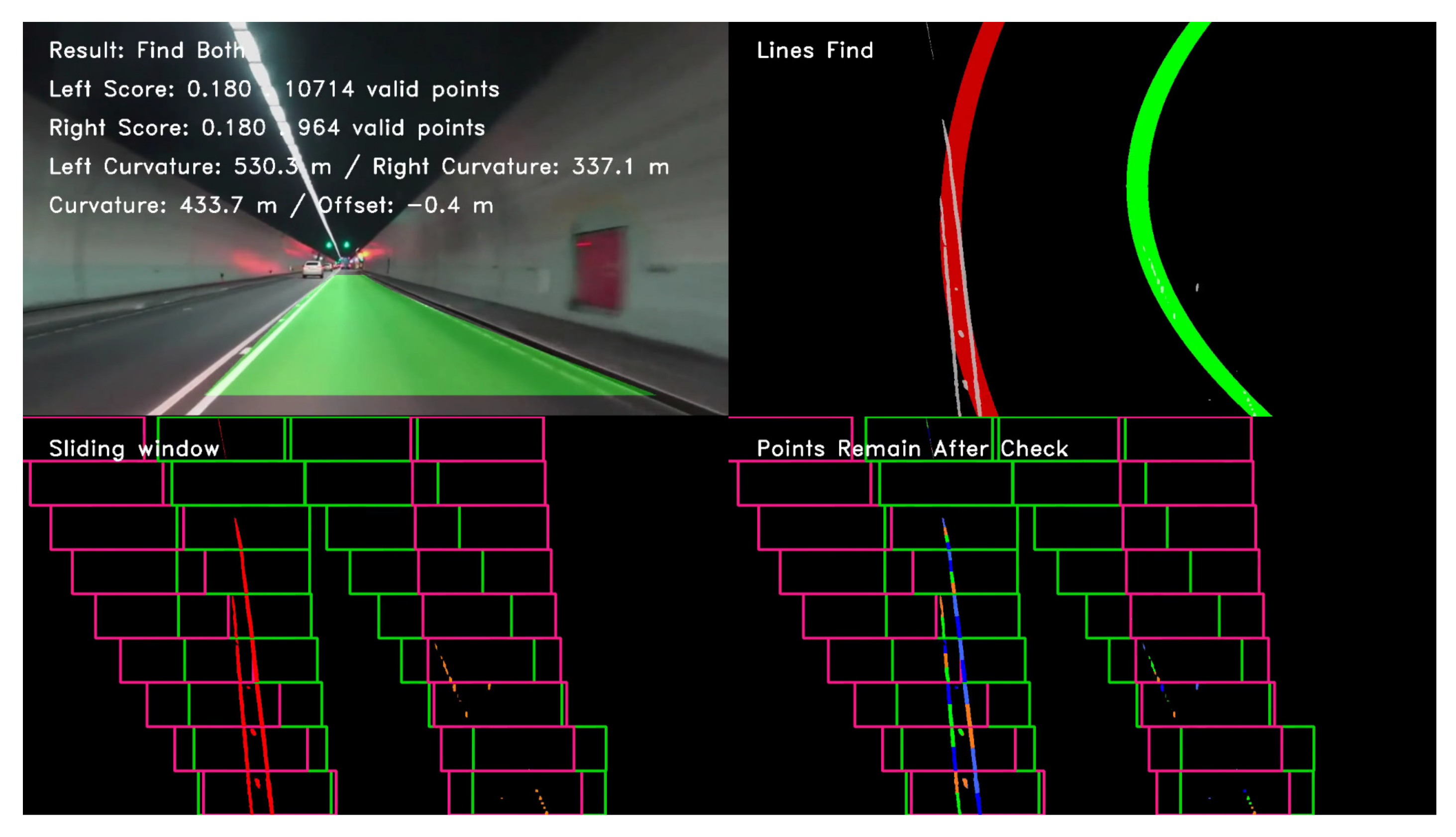
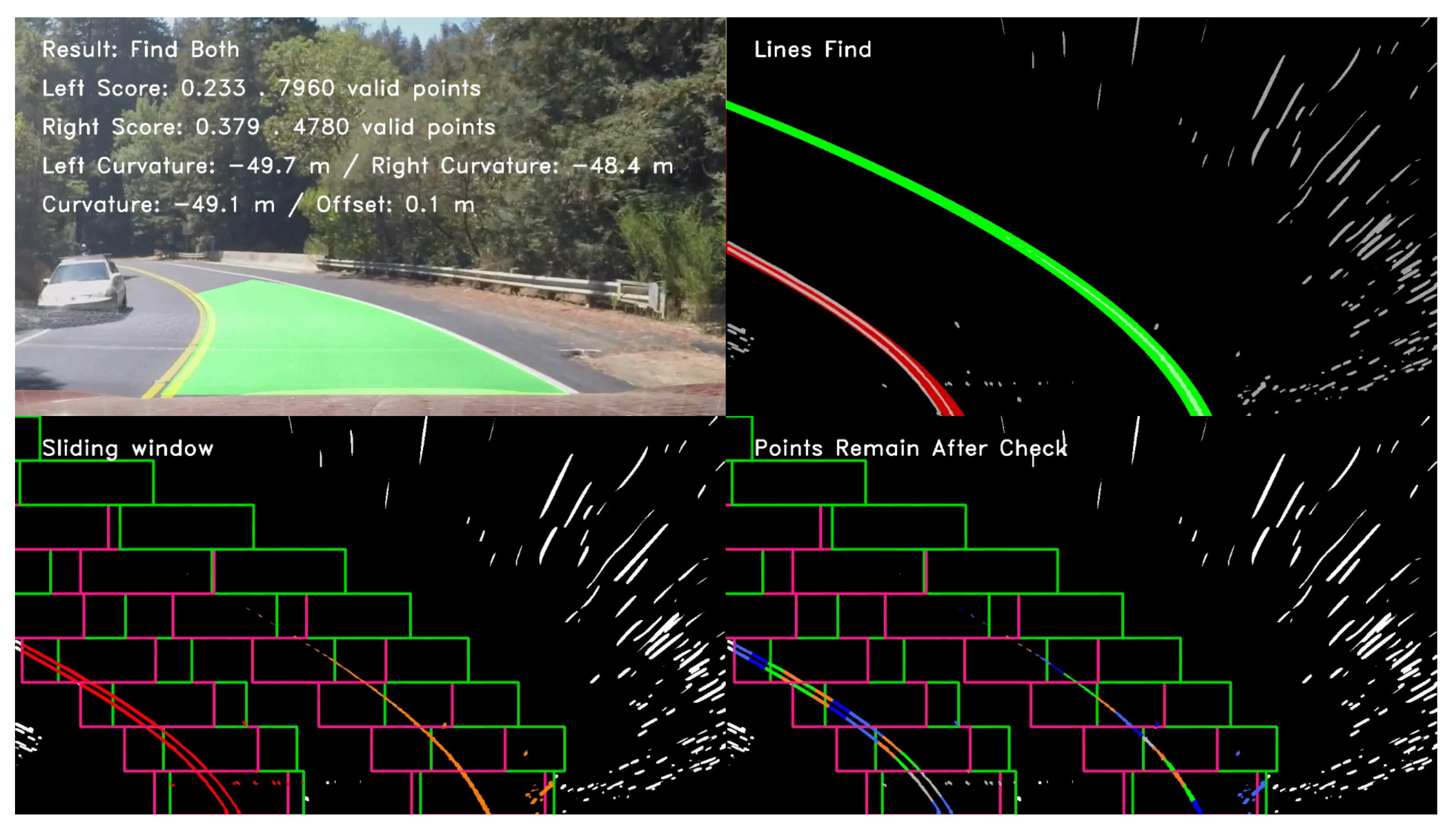
4.3.2. Lane Detection Based on Road Driving Video
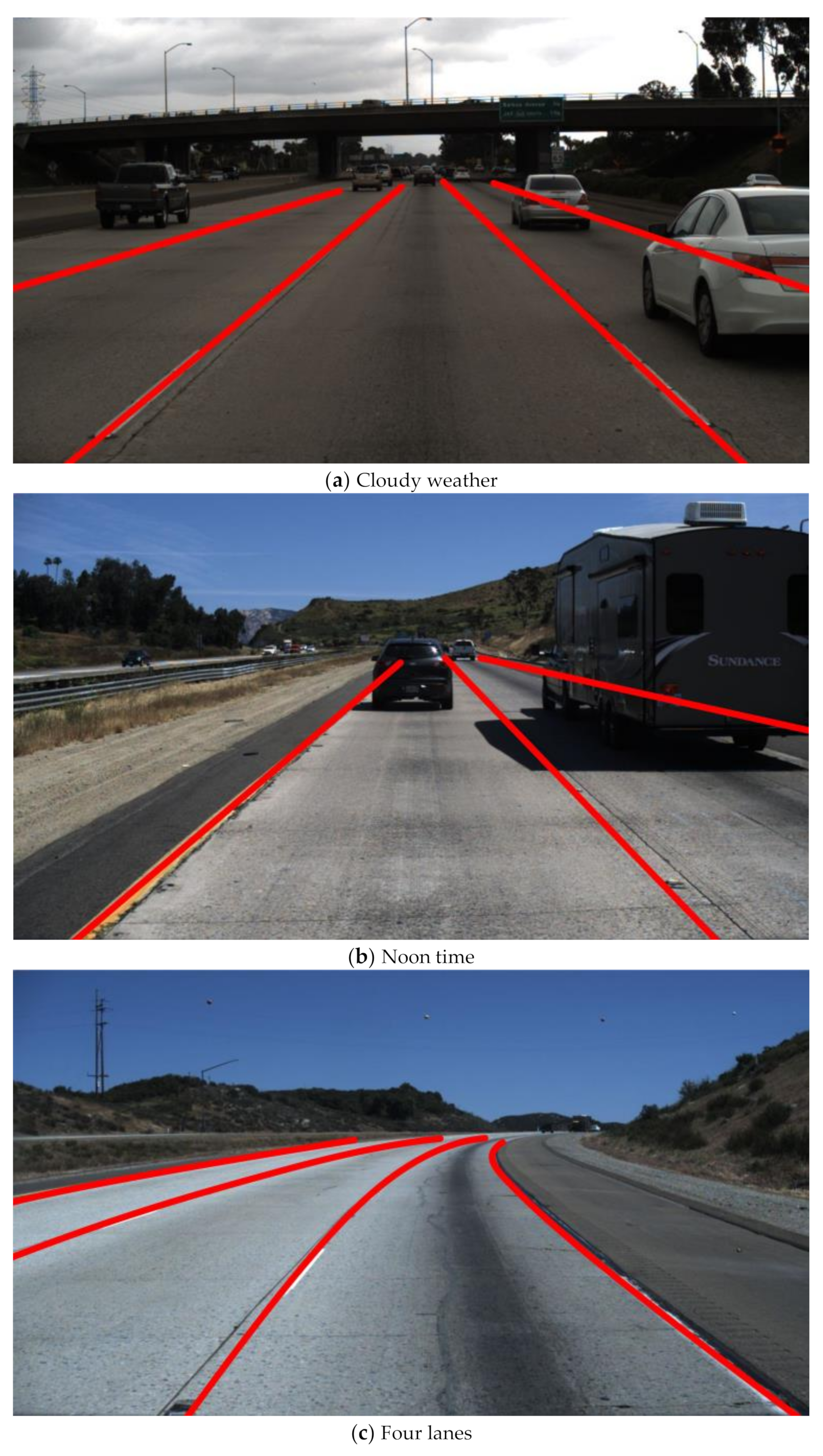
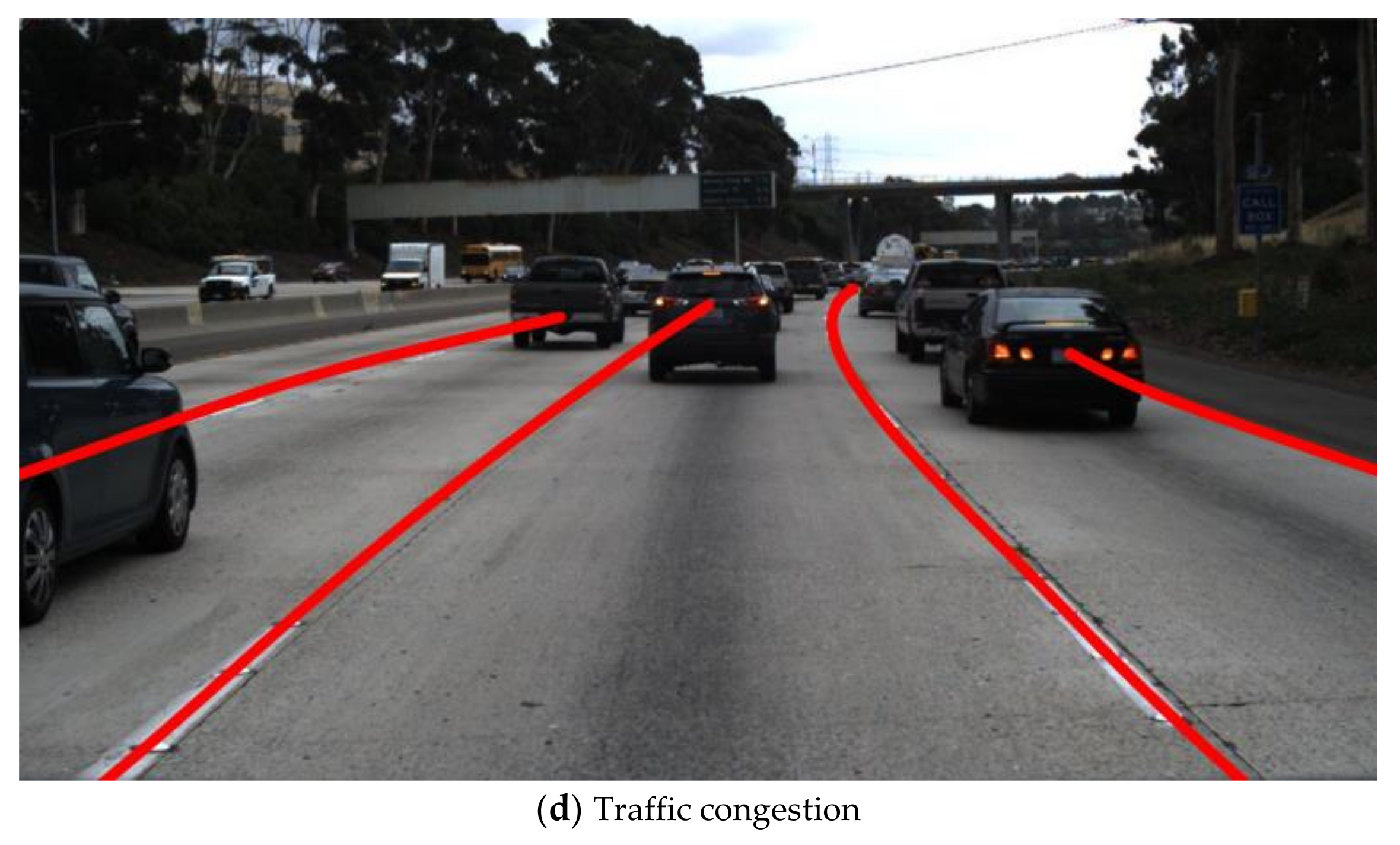
4.3.3. Lane Detection Based on the Tusimple Dataset
4.4. Algorithms Performance Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bimbraw, K. Autonomous cars: Past, present and future: A review of the developments in the last century, the present scenario and the expected future of autonomous vehicle technology. In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Alsace, France, 21–23 July 2015; pp. 191–198. [Google Scholar]
- Zhu, H.; Yuen, K.V.; Mihaylova, L.; Leung, H. Overview of environment perception for intelligent vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2584–2601. [Google Scholar] [CrossRef]
- Andreev, S.; Petrov, V.; Huang, K.; Lema, M.A.; Dohler, M. Dense moving fog for intelligent IoT: Key challenges and opportunities. IEEE Commun. Mag. 2019, 57, 34–41. [Google Scholar] [CrossRef]
- Chen, C.J.; Peng, H.Y.; Wu, B.F.; Chen, Y.H. A real-time driving assistance and surveillance system. J. Inf. Sci. Eng. 2009, 25, 1501–1523. [Google Scholar]
- Zhou, Y.; Wang, G.; Xu, G.Q.; Fu, G.Q. Safety driving assistance system design in intelligent vehicles. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO), Bali, Indonesia, 5–10 December 2014; pp. 2637–2642. [Google Scholar]
- D’Cruz, C.; Ju, J.Z. Lane detection for driver assistance and intelligent vehicle applications. In Proceedings of the 2007 International Symposium on Communications and Information Technologies (ISCIT), Sydney, Australia, 16–19 October 2007; pp. 1291–1296. [Google Scholar]
- Kum, C.H.; Cho, D.C.; Ra, M.S.; Kim, W.Y. Lane detection system with around view monitoring for intelligent vehicle. In Proceedings of the 2013 International SoC Design Conference (ISOCC), Busan, Korea, 17–19 November 2013; pp. 215–218. [Google Scholar]
- Scaramuzza, D.; Censi, A.; Daniilidis, K. Exploiting motion priors in visual odometry for vehicle-mounted cameras with non-holonomic constraints. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems: Celebrating 50 Years of Robotics (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 4469–4476. [Google Scholar]
- Li, B.; Zhang, X.L.; Sato, M. Pitch angle estimation using a Vehicle-Mounted monocular camera for range measurement. In Proceedings of the 2014 12th IEEE International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 1161–1168. [Google Scholar]
- Schreiber, M.; Konigshof, H.; Hellmund, A.; Stiller, C. Vehicle localization with tightly coupled GNSS and visual odometry. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; pp. 858–863. [Google Scholar]
- Zhang, Y.L.; Liang, W.; He, H.S.; Tan, J.D. Perception of vehicle and traffic dynamics using visual-inertial sensors for assistive driving. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 538–543. [Google Scholar]
- Wang, J.N.; Ma, H.B.; Zhang, X.H.; Liu, X.M. Detection of lane lines on both sides of road based on monocular camera. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1134–1139. [Google Scholar]
- Li, Y.S.; Zhang, W.B.; Ji, X.W.; Ren, C.X.; Wu, J. Research on lane a compensation method based on multi-sensor fusion. Sensors 2019, 19, 1584. [Google Scholar] [CrossRef] [PubMed]
- Zheng, B.G.; Tian, B.X.; Duan, J.M.; Gao, D.Z. Automatic detection technique of preceding lane and vehicle. In Proceedings of the IEEE International Conference on Automation and Logistics (ICAL), Qingdao, China, 1–3 September 2008; pp. 1370–1375. [Google Scholar]
- Haselhoff, A.; Kummert, A. 2D line filters for vision-based lane detection and tracking. In Proceedings of the 2009 International Workshop on Multidimensional (nD) Systems (nDS), Thessaloniki, Greece, 29 June–1 July 2009; pp. 1–5. [Google Scholar]
- Son, J.; Yoo, H.; Kim, S.; Sohn, K. Real-time illumination invariant lane detection for lane departure warning system. Expert Syst. Appl. 2015, 42, 1816–1824. [Google Scholar] [CrossRef]
- Amini, H.; Karasfi, B. New approach to road detection in challenging outdoor environment for autonomous vehicle. In Proceedings of the 2016 Artificial Intelligence and Robotics (IRANOPEN), Qazvin, Iran, 9 April 2016; pp. 7–11. [Google Scholar]
- Kong, H.; Sarma, S.E.; Tang, F. Generalizing laplacian of gaussian filters for vanishing-point detection. IEEE Trans. Intell. Transp. Syst. 2013, 14, 408–418. [Google Scholar] [CrossRef]
- Hervieu, A.; Soheilian, B. Road side detection and reconstruction using LIDAR sensor. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IEEE IV), Gold Coast, Australia, 23–26 June 2013; pp. 1247–1252. [Google Scholar]
- Hata, A.Y.; Osorio, F.S.; Wolf, D.F. Robust curb detection and vehicle localization in urban environments. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium (IV), Dearborn, MI, USA, 8–11 June 2014; pp. 1257–1262. [Google Scholar]
- Geiger, A.; Lauer, M.; Wojek, C.; Stiller, C.; Urtasun, R. 3D traffic scene understanding from movable platforms. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1012–1025. [Google Scholar] [CrossRef] [PubMed]
- Liang, J.; Lee, C. Efficient collision-free path-planning of multiple mobile robots system using efficient artificial bee colony algorithm. Adv. Eng. Softw. 2015, 79, 47–56. [Google Scholar] [CrossRef]
- Bosaghzadeh, A.; Routeh, S.S. A novel PCA perspective mapping for robust lane detection in urban streets. In Proceedings of the 19th CSI International Symposium on Artificial Intelligence and Signal Processing (AISP 2017), Shiraz, Iran, 25–27 October 2017; pp. 145–150. [Google Scholar]
- He, B.; Ai, R.; Yan, Y.; Lang, X.P. Accurate and robust lane detection based on dual-view convolutional neutral network. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; pp. 1041–1046. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Pan, X.G.; Shi, J.P.; Luo, P.; Wang, X.G.; Tang, X.O. Spatial as deep: Spatial CNN for traffic scene understanding. In Proceedings of the 32nd AAAI Conference on Artificial Intelligence (AAAI), New Orleans, LA, USA, 2–7 February 2018; pp. 7276–7283. [Google Scholar]
- Tan, H.; Wang, J.F.; Zhang, K.; Cui, S.M. Research on lane marking lines detection. In Proceedings of the 2012 International Conference on Mechanical Engineering, Materials Science and Civil Engineering (ICMEMSCE), Harbin, China, 18–20 August 2012; pp. 634–637. [Google Scholar]
- Fernandez, C.; Izquierdo, R.; Llorca, D.F.; Sotelo, M.A. Road curb and lanes detection for autonomous driving on urban scenarios. In Proceedings of the 2014 17th IEEE International Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1964–1969. [Google Scholar]
- Kumar, P.; McElhinney, C.P.; Lewis, P.; McCarthy, T. An automated algorithm for extracting road edges from terrestrial mobile LiDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 85, 44–55. [Google Scholar] [CrossRef]
- Wang, Y.Q.; Liang, B.; Zhuang, L.L. Applied technology in unstructured road detection with road environment based on SIFT-HARRIS. In Proceedings of the 4th International Conference on Industry, Information System and Material Engineering (IISME), Nanjing, China, 26–27 July 2014; pp. 259–262. [Google Scholar]
- Li, X.L.; Ji, Y.F.; Gao, Y.; Feng, X.X.; Li, W.X. Unstructured road detection based on region growing. In Proceedings of the 30th Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 3451–3456. [Google Scholar]
- Wang, G.J.; Wu, J.; He, R.; Yang, S. A point cloud-based robust road curb detection and tracking method. IEEE Access 2019, 7, 24611–24625. [Google Scholar] [CrossRef]
- Cácere Hernández, D.; Filonenko, A.; Shahbaz, A.; Jo, K.H. Lane marking detection using image features and line fitting model. In Proceedings of the 10th International Conference on Human System Interactions (HSI), Ulsan, Korea, 17–19 July 2017; pp. 234–238. [Google Scholar]
- Li, L.; Luo, W.T.; Wang, K.C.P. Lane marking detection and reconstruction with line-scan imaging data. Sensors 2018, 18, 1635. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Yang, W.; Tang, X.L.; Liu, J. A fast learning method for accurate and robust lane detection using two-stage feature extraction with YOLO v3. Sensors 2018, 18, 4308. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.H.; Kim, J.H.; Jang, G.J.; Lee, M.H. Fast learning method for convolutional neural networks using extreme learning machine and its application to lane detection. Neural Netw. 2017, 87, 109–121. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Gelernter, J.; Wang, X.; Chen, W.G.; Gao, J.X.; Zhang, Y.J.; Li, X.L. Lane marking detection via deep convolutional neural network. Neurocomputing 2018, 280, 46–55. [Google Scholar] [CrossRef] [PubMed]
- Feng, J.; Wu, Y.; Zhang, Y. Lane detection base on deep learning. In Proceedings of the 2018 11th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 8–9 December 2018; pp. 315–318. [Google Scholar]
- Brabandere, B.D.; Gansbeke, W.V.; Neven, D.; Proesmans, M.; Gool, L.V. End-to-end lane detection through differentiable least-squares fitting. Comput. Sci. 2019, arXiv:1902.00293. [Google Scholar]
- Mostafa, K.; Chiang, J.Y.; Her, I. Edge-detection method using binary morphology on hexagonal images. Imaging Sci. J. 2015, 63, 168–173. [Google Scholar] [CrossRef]
- Singh, S.; Singh, R. Comparison of various edge detection techniques. In Proceedings of the 2nd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 11–13 March 2015; pp. 393–396. [Google Scholar]
- Yousaf, R.M.; Habib, H.A.; Dawood, H.; Shafiq, S. A comparative study of various edge detection methods. In Proceedings of the 14th International Conference on Computational Intelligence and Security (CIS), Hangzhou, China, 16–19 November 2018; pp. 96–99. [Google Scholar]
- Bonin-Font, F.; Burguera, A.; Ortiz, A.; Oliver, G. Concurrent visual navigation and localisation using inverse perspective transformation. Electron. Lett. 2012, 48, 264–266. [Google Scholar] [CrossRef]
- Wu, Y.F.; Chen, Z.S. A detection method of road traffic sign based on inverse perspective transform. In Proceedings of the 2016 IEEE International Conference of Online Analysis and Computing Science (ICOACS), Chongqing, China, 28–29 May 2016; pp. 293–296. [Google Scholar]
- Waine, M.; Rossa, C.; Sloboda, R.; Usmani, N.; Tavakoli, M. 3D shape visualization of curved needles in tissue from 2D ultrasound images using RANSAC. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4723–4728. [Google Scholar]
- Cameron, K.J.; Bates, D.J. Geolocation with FDOA measurements via polynomial systems and RANSAC. In Proceedings of the 2018 IEEE Radar Conference (RadarConf), Oklahoma City, OK, USA, 23–27 April 2018; pp. 676–681. [Google Scholar]
- Davy, N.; Bert, D.B.; Stamatios, G.; Marc, P.; Luc, V.G. Towards end-to-end lane detection: An instance segmentation approach. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 September 2018; pp. 286–291. [Google Scholar]
- Liu, P.S.; Yang, M.; Wang, C.X.; Wang, B. Multi-lane detection via multi-task network in various road scenes. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 2750–2755. [Google Scholar]
- Kuhnl, T.; Kummert, F.; Fritsch, J. Spatial ray features for real-time ego-lane extraction. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems (ITSC), Anchorage, AK, USA, 16–19 September 2012; pp. 288–293. [Google Scholar]
- Zheng, F.; Luo, S.; Song, K.; Yan, C.W.; Wang, M.C. Improved lane line detection algorithm based on Hough transform. Pattern Recognit. Image Anal. 2018, 28, 254–260. [Google Scholar] [CrossRef]
- Philion, J. FastDraw: Addressing the long tail of lane detection by adapting a sequential prediction network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–21 June 2019; pp. 11582–11591. [Google Scholar]
- Zou, Q.; Jiang, H.W.; Dai, Q.Y.; Yue, Y.H.; Chen, L.; Wang, Q. Robust lane detection from continuous driving scenes using deep neural networks. Comput. Sci. 2019, arXiv:1903.02193. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Video Sequence Number | Complex Road Conditions | Total Frames | Detected Frames | Misdetected and Missed Frames | Accurate Recognition Rate (%) | Average Processing Time (ms)/ Frame |
|---|---|---|---|---|---|---|
| 1 | Highway | 1535 | 1522 | 13 | 99.15 | 20.8 |
| 2 | Tunnel Road | 1763 | 1736 | 27 | 98.47 | 21.6 |
| 3 | Mountain Road | 1470 | 1438 | 32 | 97.82 | 22.1 |
| Total | - | 4768 | 4696 | 72 | 98.49 | 21.5 |
| Sequence Number | Condition Type | Lanes Total Number | Correct Recognition Number | False and Missed Recognition Number | Accurate Recognition Rate (%) | Average Processing Time (ms)/ Frame |
|---|---|---|---|---|---|---|
| 1 | Weather | 573 | 561 | 12 | 97.91 | 21.9 |
| 2 | Daytime | 561 | 555 | 6 | 98.93 | 21.7 |
| 3 | Lanes Number | 578 | 573 | 5 | 99.13 | 22.8 |
| 4 | Traffic Environment | 566 | 553 | 13 | 97.70 | 22.5 |
| Total | - | 2278 | 2242 | 36 | 98.42 | 22.2 |
| Method | Algorithm | Average Detection Accuracy (%) | Average Processing Time (ms)/ Frame | FP | FN | System Environment |
|---|---|---|---|---|---|---|
| Traditional | Spatial Ray Features [49] | 94.40 | 45.0 | - | - | NVIDIA GeForce GTX 580, GPU |
| Improved Hough Transform [50] | 95.70 | 65.4 | - | - | Intel Core i7-6700K CPU @ 4 GHz | |
| Deep Learning | FastDraw Resnet [51] | 95.00 | 65.3 | 0.065 | 0.048 | NVIDIA GeForce GTX 1080, GPU |
| ConvLSTM [52] | 97.25 | 42.0 | 0.042 | 0.0185 | Intel Core Xeon E5-2630 @ 2.3 GHz, GeForce GTX TITAN-X GPU | |
| Proposed | Ours | 98.42 | 22.2 | - | - | Intel(R) Core(TM) i5-6500 CPU @ 3.20 GHz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, J.; Song, C.; Song, S.; Xiao, F.; Peng, S. Lane Detection Algorithm for Intelligent Vehicles in Complex Road Conditions and Dynamic Environments. Sensors 2019, 19, 3166. https://doi.org/10.3390/s19143166
Cao J, Song C, Song S, Xiao F, Peng S. Lane Detection Algorithm for Intelligent Vehicles in Complex Road Conditions and Dynamic Environments. Sensors. 2019; 19(14):3166. https://doi.org/10.3390/s19143166
Chicago/Turabian StyleCao, Jingwei, Chuanxue Song, Shixin Song, Feng Xiao, and Silun Peng. 2019. "Lane Detection Algorithm for Intelligent Vehicles in Complex Road Conditions and Dynamic Environments" Sensors 19, no. 14: 3166. https://doi.org/10.3390/s19143166
APA StyleCao, J., Song, C., Song, S., Xiao, F., & Peng, S. (2019). Lane Detection Algorithm for Intelligent Vehicles in Complex Road Conditions and Dynamic Environments. Sensors, 19(14), 3166. https://doi.org/10.3390/s19143166