Design Procedure and Experimental Verification of a Broadband Quad-Stable 2-DOF Vibration Energy Harvester

Abstract
1. Introduction
2. System Structure and Modeling
2.1. Harvester Structure and Description
2.2. Theoretical Modeling
3. Design Methodology of The Harvester
3.1. Harvester Parameters Selection
3.2. Selection of Gap Distances Between Magnets
4. Simulation and Experimental Results
4.1. Experimental Setup Description
4.2. Experimental Procedure
4.3. Results and Discussion
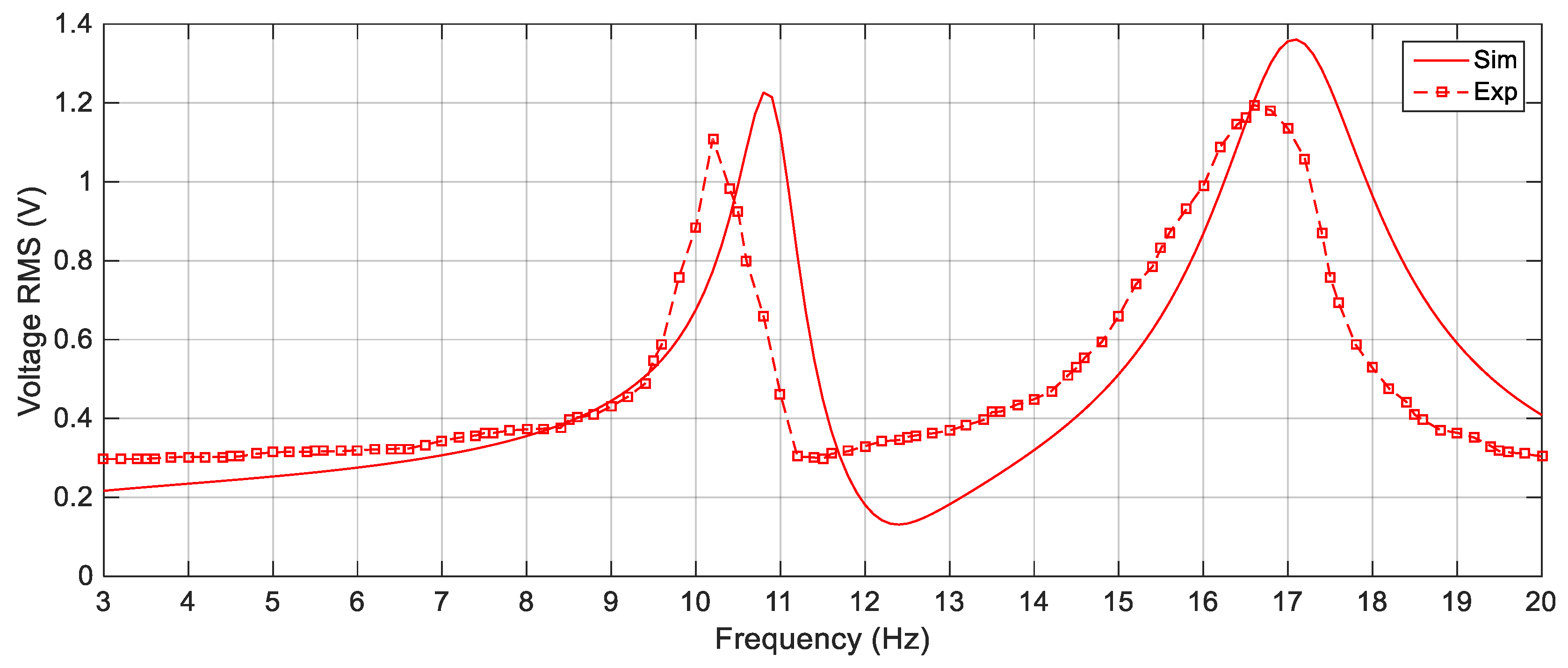
4.3.1. Linear Energy Harvester
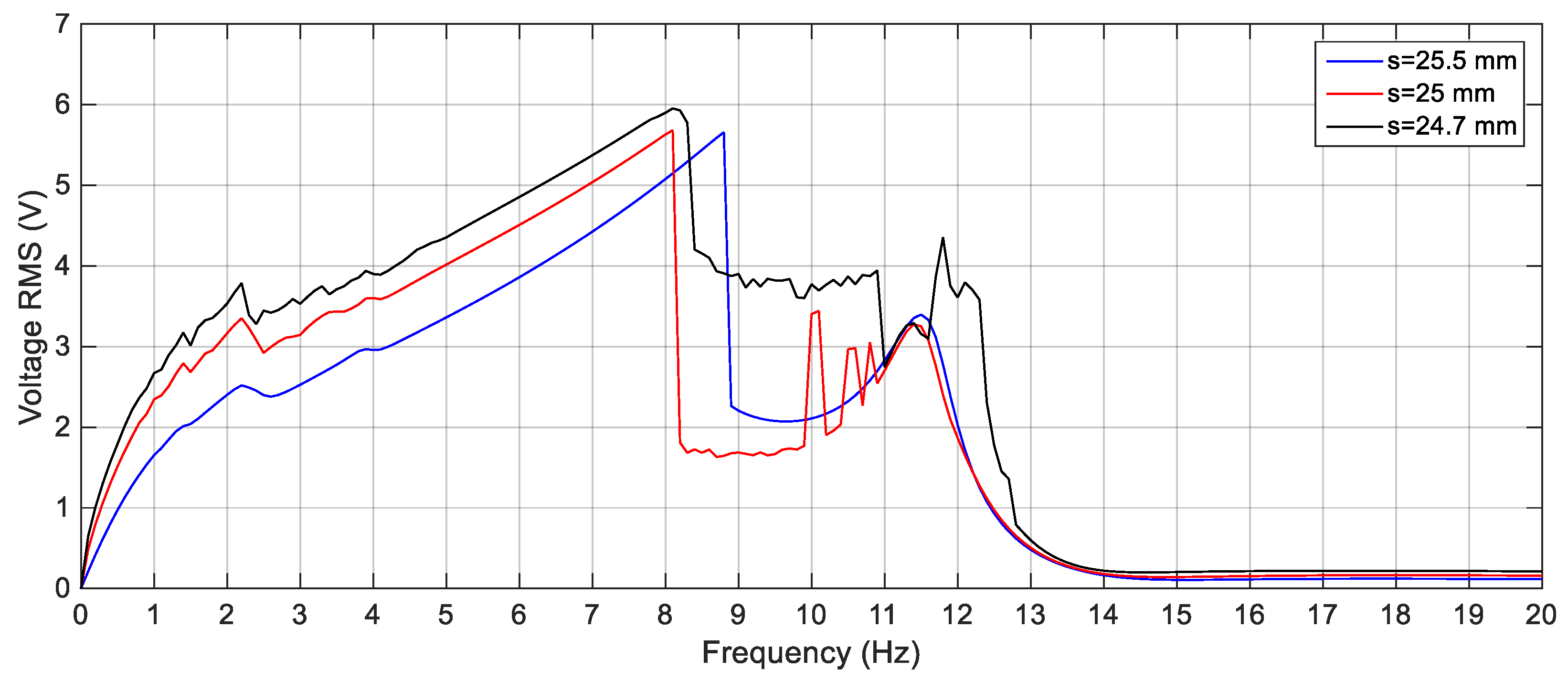
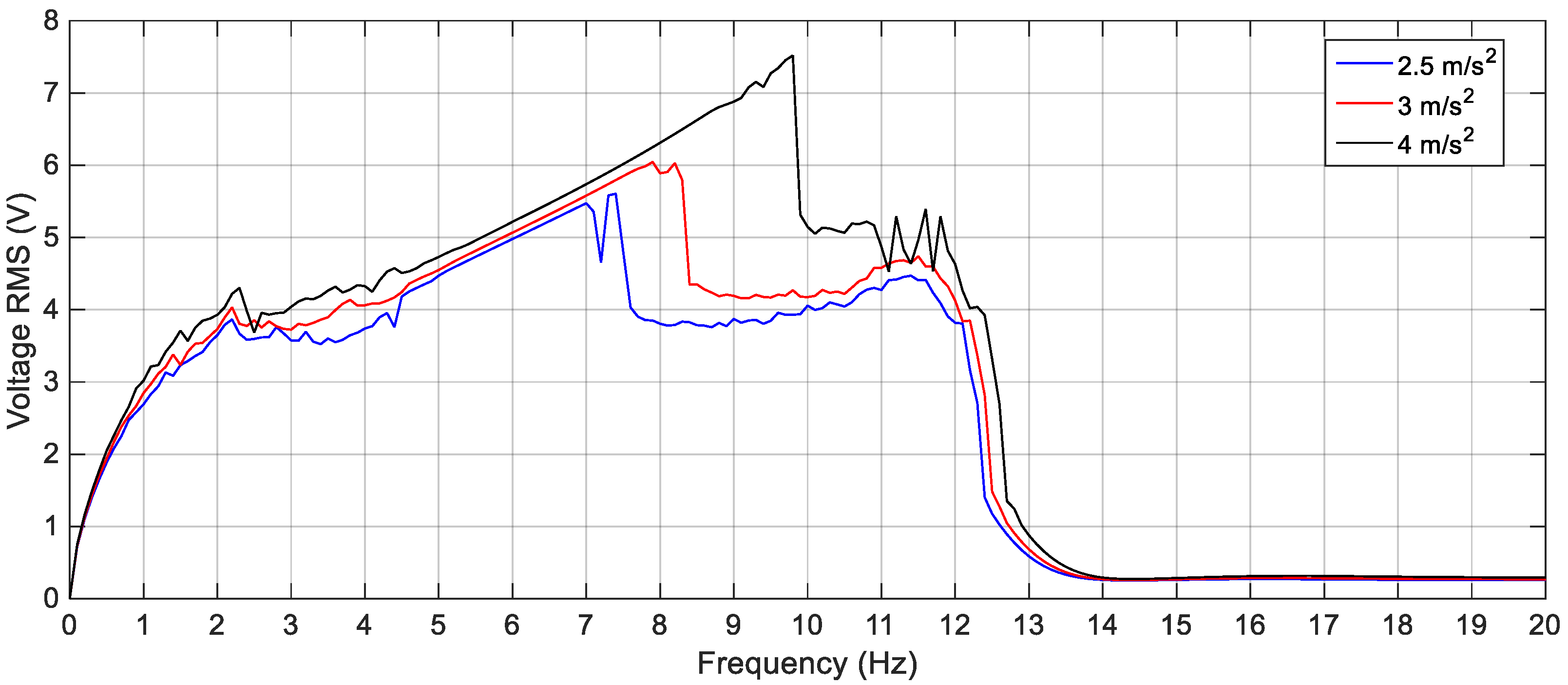
4.3.2. Bi-stable Energy Harvester
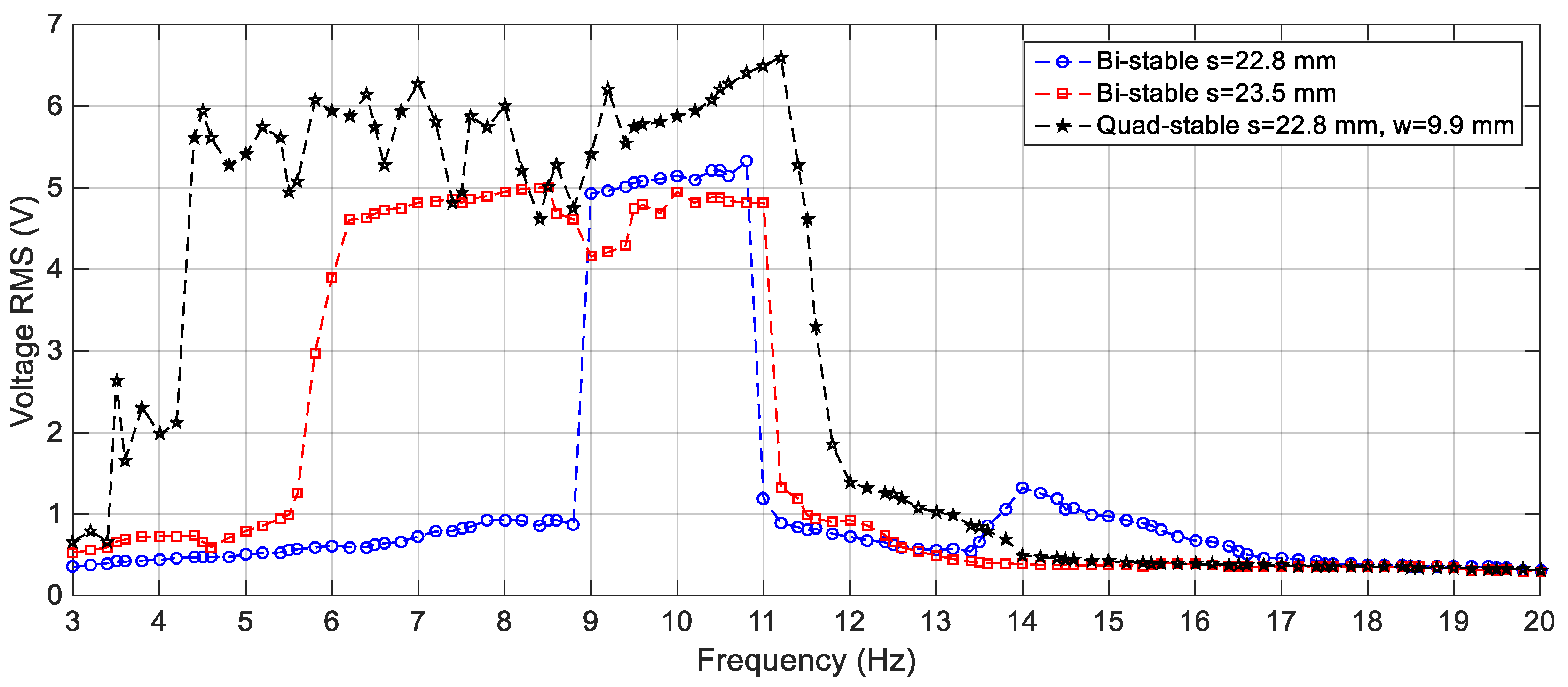
4.3.3. Quad-stable Energy Harvester
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Khan, F.U.; Qadir, M.U. State-of-the-art in vibration-based electrostatic energy harvesting. J. Micromech. Microeng. 2016, 26, 103001. [Google Scholar] [CrossRef]
- El-hami, M.; Glynne-Jones, P.; White, N.M.; Hill, M.; Beeby, S.; James, E.; Brown, A.D.; Ross, J.N. Design and fabrication of a new vibration-based electromechanical power generator. Sens. Actuators A Phys. 2001, 92, 335–342. [Google Scholar] [CrossRef]
- Yang, Z.; Yang, J. Connected Vibrating Piezoelectric Bimorph Beams as a Wide-band Piezoelectric Power Harvester. J. Intell. Mater. Syst. Struct. 2009, 20, 569–574. [Google Scholar] [CrossRef]
- Halim, M.A.; Cho, H.; Park, J.Y. Design and experiment of a human-limb driven, frequency up-converted electromagnetic energy harvester. Energy Convers. Manag. 2015, 106, 393–404. [Google Scholar] [CrossRef]
- Yeo, H.G.; Xue, T.; Roundy, S.; Ma, X.; Rahn, C.; McKinstry, S.T. Strongly (001) oriented bimorph PZT film on metal foils grown by rf-sputtering for wrist-worn piezoelectric energy harvesters. Adv. Funct. Mater. 2018, 28, 1801327. [Google Scholar] [CrossRef]
- Wona, S.S.; Kawaharab, M.; Glinsekc, S.; Leed, J.; Kime, Y.; Jeongf, C.K.; Kingona, A.I.; Kima, S.H. Flexible vibrational energy harvesting devices using strain-engineered perovskite piezoelectric thin films. Nano Energy 2019, 55, 182–192. [Google Scholar] [CrossRef]
- Wardlaw, J.L.; Karsilayan, A.I. Self-powered rectifier for energy harvesting applications. IEEE J. Emerg. Sel. Top. Circuits Syst. 2011, 1, 308–320. [Google Scholar] [CrossRef]
- Aktakka, E.E.; Najafi, K. A micro inertial energy harvesting platform with self-supplied power management circuit for autonomous wireless sensor nodes. IEEE J. Solid-State Circuits 2014, 49, 2017–2029. [Google Scholar] [CrossRef]
- Lu, C.; Tsui, C.Y.; Ki, W.H. Vibration energy scavenging system with maximum power tracking for micropower applications. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2011, 19, 2109–2119. [Google Scholar] [CrossRef]
- Gu, L. Low-frequency piezoelectric energy harvesting prototype suitable for the MEMS implementation. J. Microelectron. 2011, 42, 277–282. [Google Scholar] [CrossRef]
- Eichhorn, C.; Goldschmidtboeing, F.; Woias, P. Bidirectional frequency tuning of a piezoelectric energy converter based on a cantilever beam. J. Micromech. Microeng. 2009, 19, 529–533. [Google Scholar] [CrossRef]
- Leland, E.S.; Wright, P.K. Resonance tuning of piezoelectric vibration energy scavenging generators using compressive axial preload. Smart Mater. Struct. 2006, 15, 1413–1420. [Google Scholar] [CrossRef]
- Zhua, D.; Robertsb, S.; Tudor, M.J.; Beeby, S.P. Design and experimental characterization of a tunable vibration-based electromagnetic micro-generator. Sens. Actuators A Phys. 2010, 158, 284–293. [Google Scholar] [CrossRef]
- Xue, H.; Hu, Y.; Wang, Q.M. Broadband Piezoelectric Energy Harvesting Devices Using Multiple Bimorphs with Different Operating Frequencies. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2104–2108. [Google Scholar] [CrossRef] [PubMed]
- Shahruz, S.M. Design of mechanical band-pass filters with large frequency bands for energy scavenging. Mechatronics 2006, 16, 523–531. [Google Scholar] [CrossRef]
- Toyabur, R.M.; Salauddin, M.; Cho, H.; Park, J.Y. A multimodal hybrid energy harvester based on piezoelectric-electromagnetic mechanisms for low-frequency ambient vibrations. Energy Convers. Manag. 2018, 168, 454–466. [Google Scholar] [CrossRef]
- Yeo, H.G.; Ma, X.; Rahn, C.; McKinstry, S.T. Efficient piezoelectric energy harvesters utilizing (001) textured bimorph PZT films on flexible metal foils. Adv. Funct. Mater. 2016, 26, 5940–5946. [Google Scholar] [CrossRef]
- Han, J.H.; Park, K.; Jeong, C.K. Dual-structured flexible piezoelectric film energy harvesters for effectively integrated performance. Sensors 2019, 19, 1444. [Google Scholar] [CrossRef] [PubMed]
- Xiao, H.; Wang, X.; John, S. A dimensionless analysis of a 2DOF piezoelectric vibration energy harvester. Mech. Syst. Signal Process. 2015, 58–59, 355–375. [Google Scholar] [CrossRef]
- Tang, L.; Yang, Y. A multiple-degree-of-freedom piezoelectric energy harvesting model. J. Intell. Mater. Syst. Struct. 2012, 23, 1631–1647. [Google Scholar] [CrossRef]
- Wu, H.; Tang, L.; Yang, Y.; Soh, C.K. A novel two-degrees-of-freedom piezoelectric energy harvester. J. Intell. Mater. Syst. Struct. 2012, 24, 357–368. [Google Scholar] [CrossRef]
- Sebald, G.; Kuwano, H.; Guyomar, D.; Ducharne, B. Experimental Duffing oscillator for broadband piezoelectric energy harvesting. J. Intell. Mater. Syst. Struct. 2011, 20, 102001. [Google Scholar] [CrossRef]
- Daqaq, M.F. Response of uni-modal duffing-type harvesters to random forced excitations. J. Sound Vib. 2010, 329, 3621–3631. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. Broadband piezoelectric power generation on high-energy orbits of the bistable Duffing oscillator with electromechanical coupling. J. Sound Vib. 2011, 330, 2339–2353. [Google Scholar] [CrossRef]
- Wang, W.; Cao, J.; Bowen, C.R.; Zhang, Y.; Lin, J. Nonlinear dynamics and performance enhancement of asymmetric potential bistable energy harvesters. Nonlinear Dyn. 2018, 94, 1183–1194. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Lin, J.; Wang, Z. Exploitation of a tristable nonlinear oscillator for improving broadband vibration energy harvesting. Eur. Phys. J. Appl. Phys. 2014, 67, 30902. [Google Scholar] [CrossRef]
- Zhou, Z.; Qin, W.; Zhu, P. Energy harvesting in a quad-stable harvester subjected to random excitation. AIP Adv. 2016, 6, 025022. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, W.; Zuo, M.; Tan, H.; Fan, H.; Mao, Q.; Wan, X. An Arc-Shaped Piezoelectric Bistable Vibration Energy Harvester: Modeling and Experiments. Sensors 2018, 18, 4472. [Google Scholar] [CrossRef]
- Harne, R.L.; Thota, M.; Wang, K.W. Bistable energy harvesting enhancement with an auxiliary linear oscillator. Smart Mater. Struct. 2013, 22, 125028. [Google Scholar] [CrossRef]
- Wu, Y.; Ji, H.; Qiu, J.; Han, L. A 2-degree-of-freedom cubic nonlinear piezoelectric harvester intended for practical low-frequency vibration. Sens. Actuators A Phys. 2017, 264, 1–10. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Maiorca, F.; Trigona, C. Analysis of two dimensional, wide-band, bistable vibration energy harvester. Sens. Actuators A Phys. 2013, 202, 176–182. [Google Scholar] [CrossRef]
- Zou, H.X.; Zhang, W.; Li, W.; Wei, K.; Gao, Q.; Peng, Z.; Meng, G. Design and experimental investigation of a magnetically coupled vibration energy harvester using two inverted piezoelectric cantilever beams for rotational motion. Energy Convers. Manag. 2017, 148, 1391–1398. [Google Scholar] [CrossRef]
- Wu, H.; Tang, L.; Yang, Y.; Soh, C.K. Development of a broadband nonlinear two-degree-of-freedom piezoelectric energy harvester. J. Intell. Mater. Syst. Struct. 2014, 25, 1875–1889. [Google Scholar] [CrossRef]
- Krishnasamy, M.; Upadrashta, D.; Yang, W.; Lenka, T.R. Distributed Parameter Modelling of Cutout 2-DOF Cantilevered Piezo-Magneto-Elastic Energy Harvester. J. Microelectromech. Syst. 2018, 27, 1160–1170. [Google Scholar] [CrossRef]
- Zhou, S.; Yan, B.; Inman, D.J. A Novel Nonlinear Piezoelectric Energy Harvesting System Based on Linear-Element Coupling: Design, Modeling and Dynamic Analysis. Sensors 2018, 18, 1492. [Google Scholar] [CrossRef]
- Thomson, W.T. Theory of Vibration with Applications, 2nd ed.; George Allen & Unwin: London, UK, 1983. [Google Scholar]
- Yung, K.W.; Landecker, P.B.; Villani, D.D. An analytic solution for the force between two magnetic dipoles. Magn. Electr. Sep. 1998, 9, 39–52. [Google Scholar] [CrossRef]
- Tang, L.; Yang, Y.; Soh, C.K. Improving functionality of vibration energy harvesters using magnets. J. Intell. Mater. Syst. Struct. 2012, 23, 1433–1449. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Inman, D.J.; Lin, J.; Liu, S.; Wang, Z. Broadband tristable energy harvester: Modeling and experiment verification. Appl. Energy 2014, 133, 33–39. [Google Scholar] [CrossRef]
- Upadrashta, D.; Yang, Y. Finite element modeling of nonlinear piezoelectric energy harvesters with magnetic interaction. Smart Mater. Struct. 2015, 24, 045042. [Google Scholar] [CrossRef]
- Lei, Y.; Wen, Z.; Chen, L. Simulation and testing of a micro electromagnetic energy harvester for self-powered system. AIP Adv. 2014, 4, 031303. [Google Scholar] [CrossRef]
- Lia, S.; Crovettoc, A.; Penga, Z.; Zhanga, A.; Hansenc, O.; Wangd, M.; Lie, X.; Wanga, F. Bi-resonant structure with piezoelectric PVDF films for energy harvesting from random vibration sources at low frequency. Sens. Actuators A Phys. 2016, 247, 547–554. [Google Scholar] [CrossRef]
- Stanton, S.C.; McGehee, C.C.; Mann, B.P. Nonlinear dynamics for broadband energy harvesting: Investigation of a bistable piezoelectric inertial generator. Phys. D Nonlinear Phenom. 2010, 239, 640–653. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, Q.; Wang, W. Wideband quin-stable energy harvesting via combined nonlinearity. AIP Adv. 2017, 7, 045314. [Google Scholar] [CrossRef]
- Sun, S.; Tse, P.W. Modeling of a horizontal asymmetric U-shaped vibration-based piezoelectric energy harvester (U-VPEH). Mech. Syst. Signal Process. 2019, 114, 467–485. [Google Scholar] [CrossRef]
- Su, W.J.; Zu, J.; Zhu, Y. Design and development of a broadband magnet-induced dual-cantilever piezoelectric energy harvester. J. Intell. Mater. Syst. Struct. 2014, 25, 430–442. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| L1 | 93 mm | Cp | 115 nF |
| L2 | 50 mm | λ | 12 × 10−4 N/V |
| b1 | 7 mm | d | 10 mm |
| b2 | 20 mm | µ0 | 4π × 10−7 H m−1 |
| h1 | 0.5 mm | Br | 1.2 T |
| h2 | 0.2 mm | Magnet mass | 7.5 g |
| E | 210 GPa | Magnet size | 20 × 10 × 5 mm3 |
| DOF | Structure | Source | Excitation (m/s2) | fR − fL (Hz) | fC (Hz) | FOMnew (W·s2/m4) |
|---|---|---|---|---|---|---|
| SDOF | Cantilever beam | Ref. [41] | 4.9 | 3 | 122 | 49.8 × 10−3 |
| SDOF | Bi-resonant structure | Ref. [42] | 10 | 15 | 20.5 | 0.1197 × 10−3 |
| SDOF | Cantilever beam (Bi-stable) | Ref. [43] | 10 | 2.75 | 12.625 | 63.62 × 10−3 |
| SDOF | Cantilever beam (Quin-stable) | Ref. [44] | 10 | 13 | 9.5 | 70.1 × 10−3 |
| 2-DOF | U-shaped structure (Nonlinear) | Ref. [45] | 1 | 1.7 | 16.15 | 11.057 × 10−3 |
| 2-DOF | Magnetically coupled dual beam (Nonlinear) | Ref. [46] | 3 | 2.2 | 14.9 | 129 × 10−3 |
| 2-DOF | Cut-out (Mono-stable) | Ref. [33] | 2 | 5 | 17.3 | 19.12 × 10−5 |
| 2-DOF | Cut-out (Bi-stable) | This work | 3 | 6.7 | 8.25 | 62 × 10−3 |
| 2-DOF | Cut-out (Quad-stable) | This work | 3 | 7.3 | 7.95 | 165.9 × 10−3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zayed, A.A.A.; Assal, S.F.M.; Nakano, K.; Kaizuka, T.; Fath El-Bab, A.M.R. Design Procedure and Experimental Verification of a Broadband Quad-Stable 2-DOF Vibration Energy Harvester. Sensors 2019, 19, 2893. https://doi.org/10.3390/s19132893
Zayed AAA, Assal SFM, Nakano K, Kaizuka T, Fath El-Bab AMR. Design Procedure and Experimental Verification of a Broadband Quad-Stable 2-DOF Vibration Energy Harvester. Sensors. 2019; 19(13):2893. https://doi.org/10.3390/s19132893
Chicago/Turabian StyleZayed, Abdelhameed A. A., Samy F. M. Assal, Kimihiko Nakano, Tsutomu Kaizuka, and Ahmed M. R. Fath El-Bab. 2019. "Design Procedure and Experimental Verification of a Broadband Quad-Stable 2-DOF Vibration Energy Harvester" Sensors 19, no. 13: 2893. https://doi.org/10.3390/s19132893
APA StyleZayed, A. A. A., Assal, S. F. M., Nakano, K., Kaizuka, T., & Fath El-Bab, A. M. R. (2019). Design Procedure and Experimental Verification of a Broadband Quad-Stable 2-DOF Vibration Energy Harvester. Sensors, 19(13), 2893. https://doi.org/10.3390/s19132893