Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices


Abstract
1. Introduction
2. Methodology
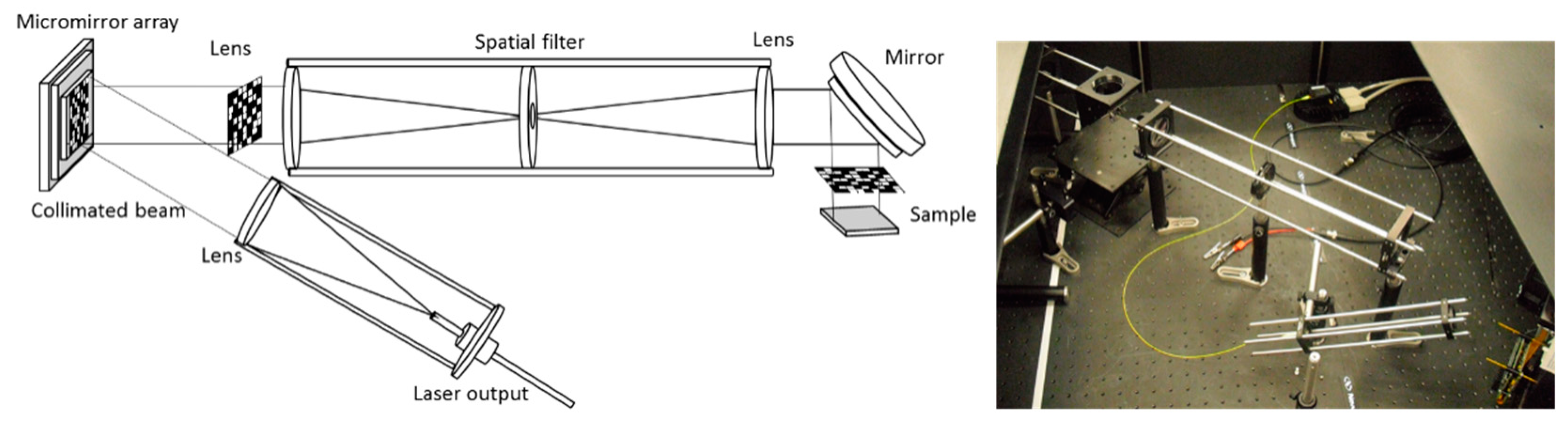
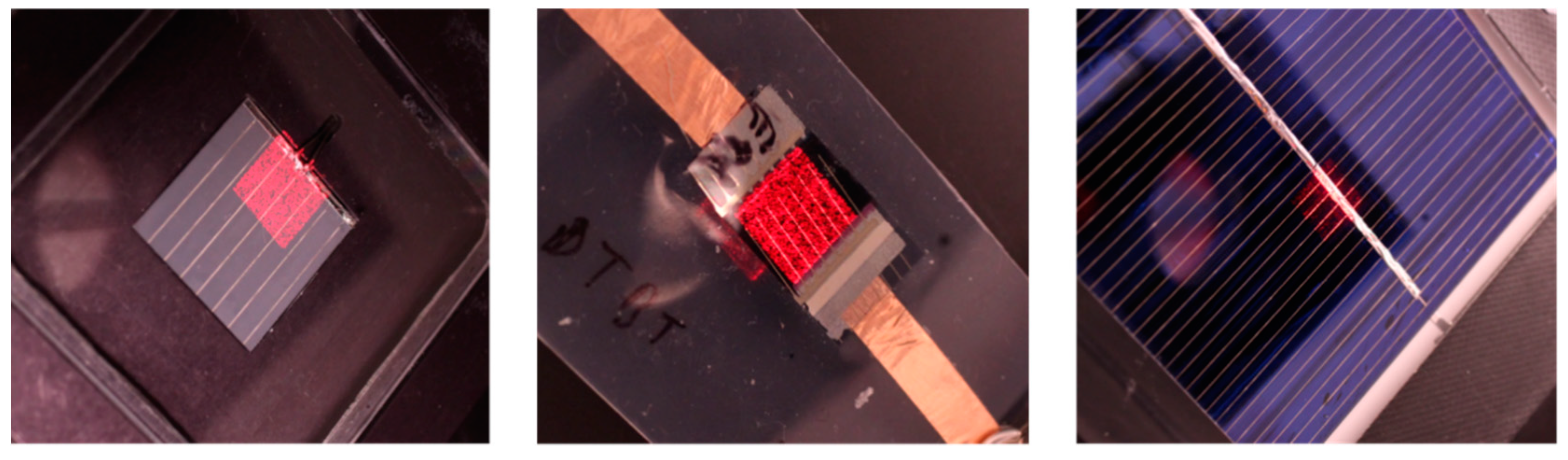
2.1. Experimental Layout
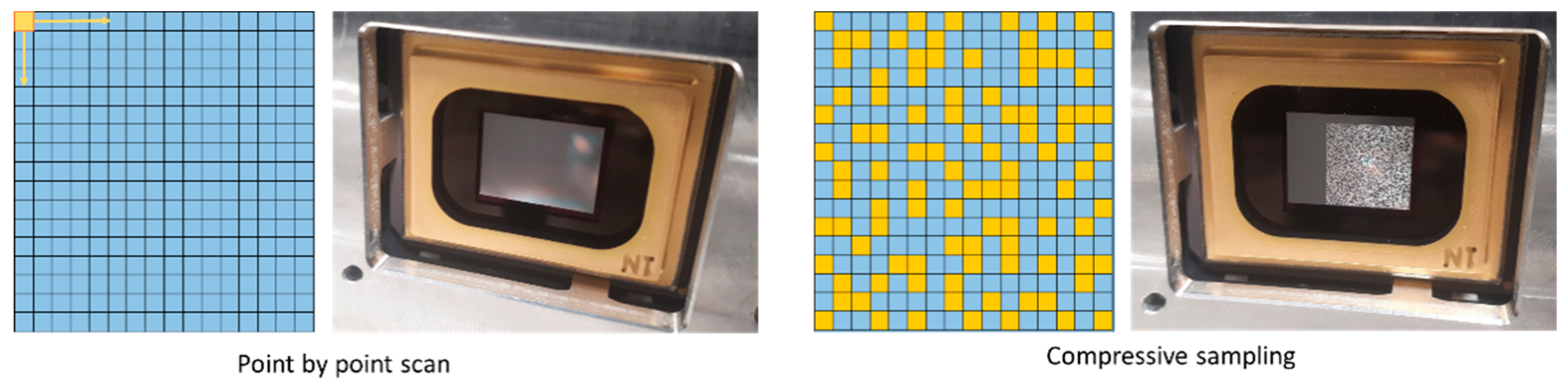
2.2. Compressed Sensing Current Mapping
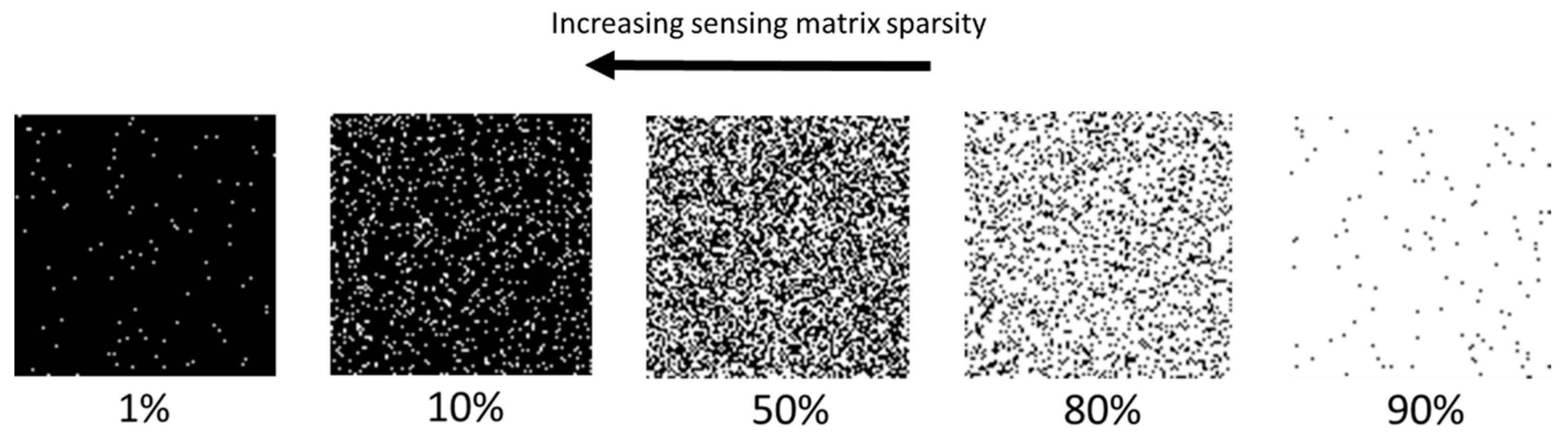
2.3. Sensing Matrix Sparsity
3. Results
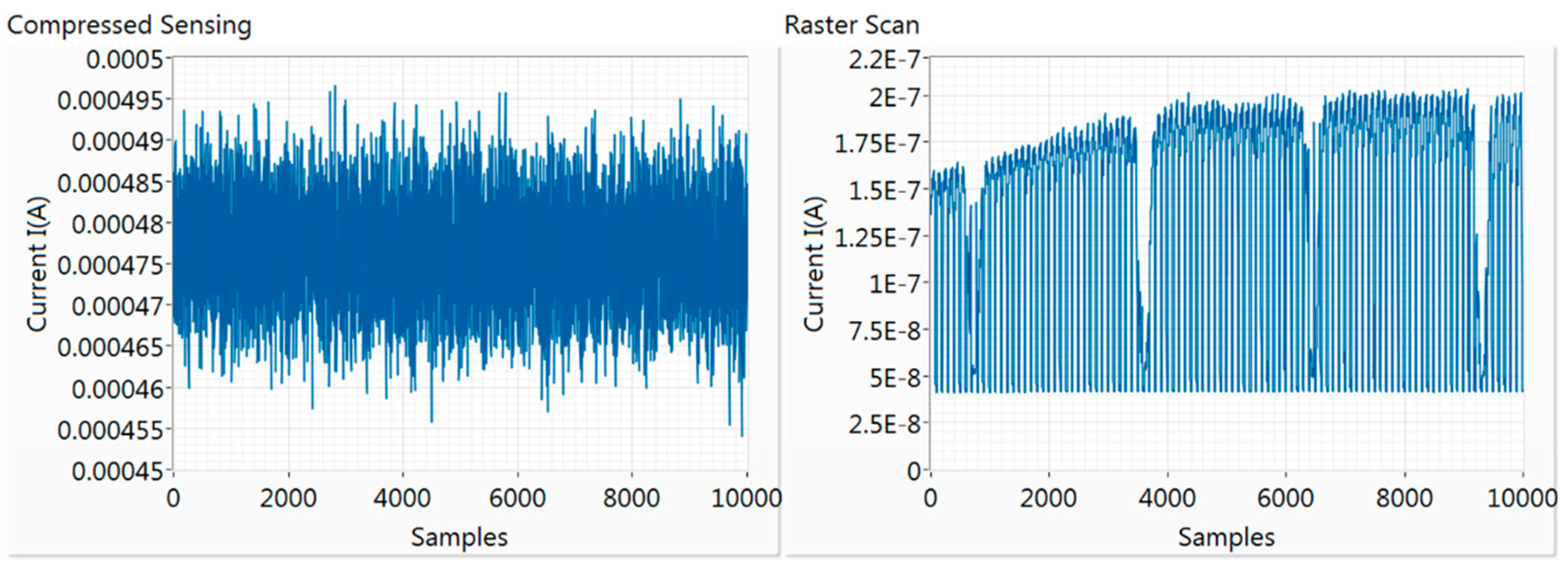
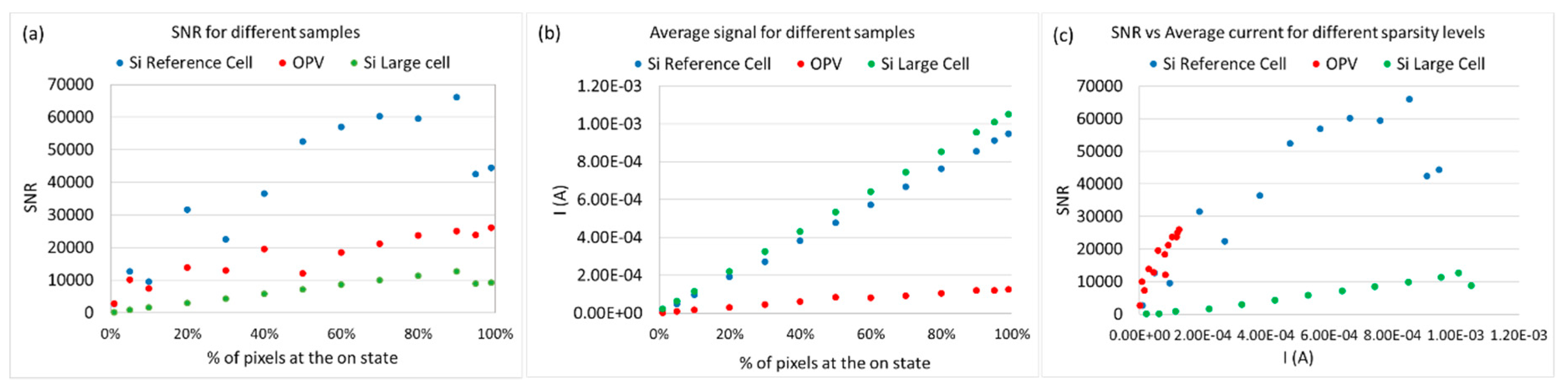
3.1. Signal Amplification
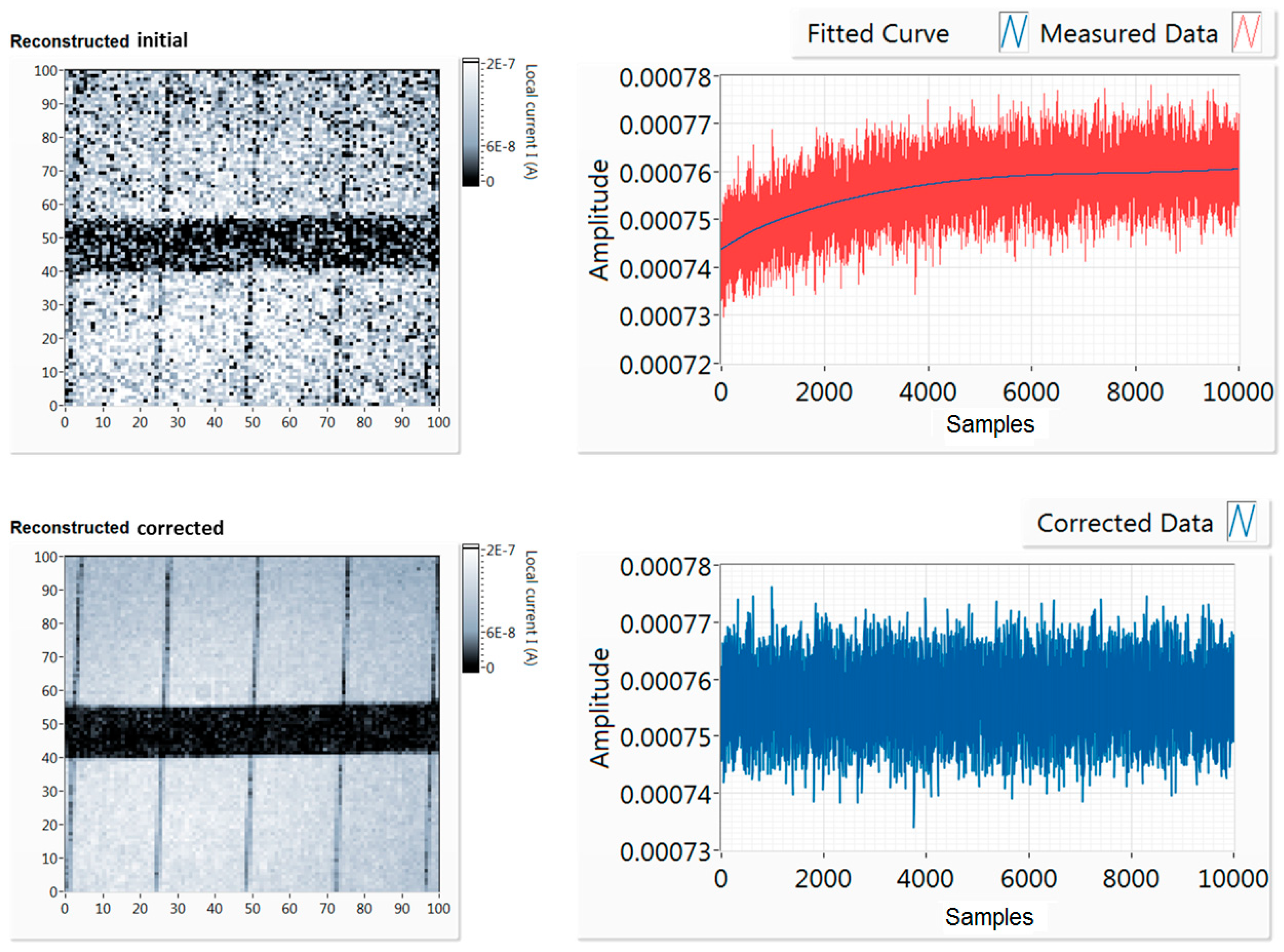
3.2. Low-Frequency Noise Correction
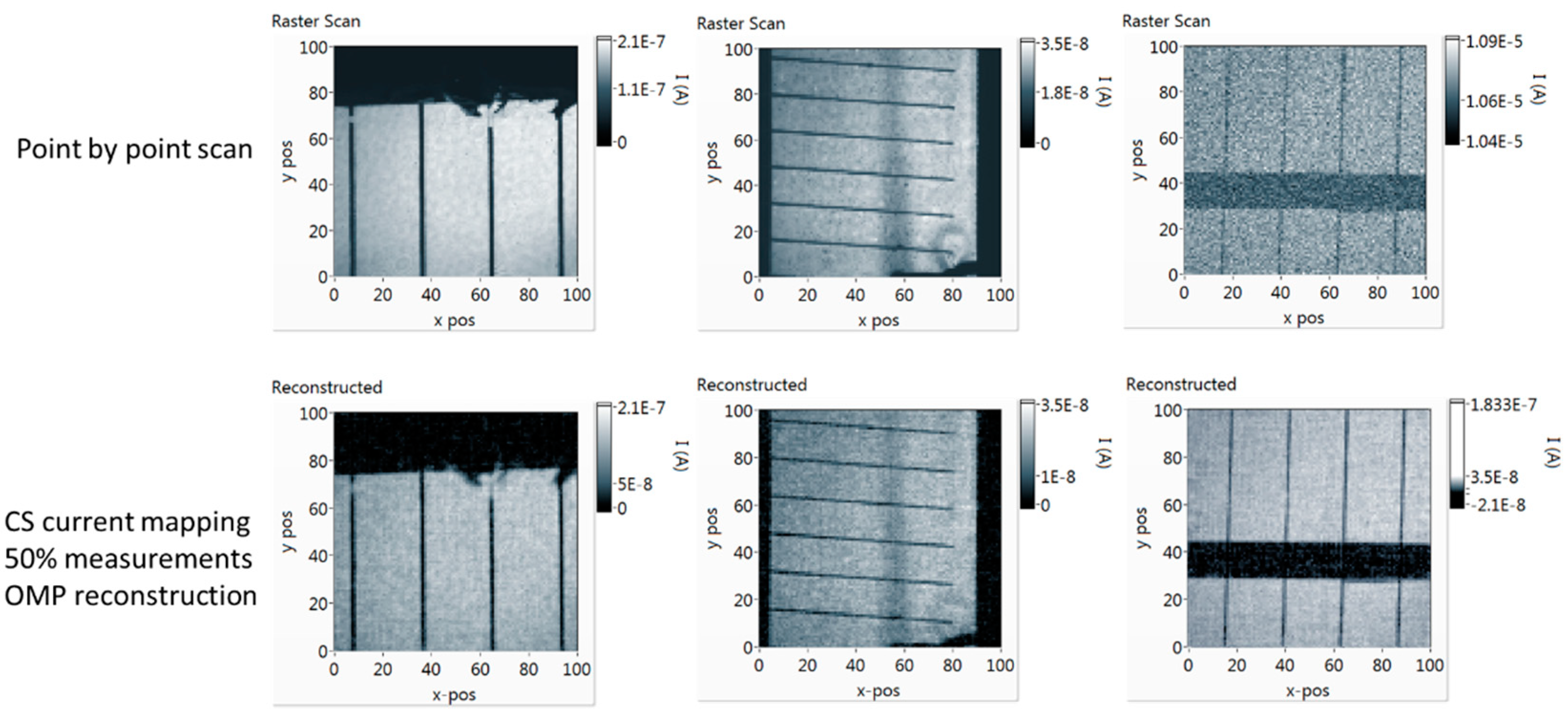
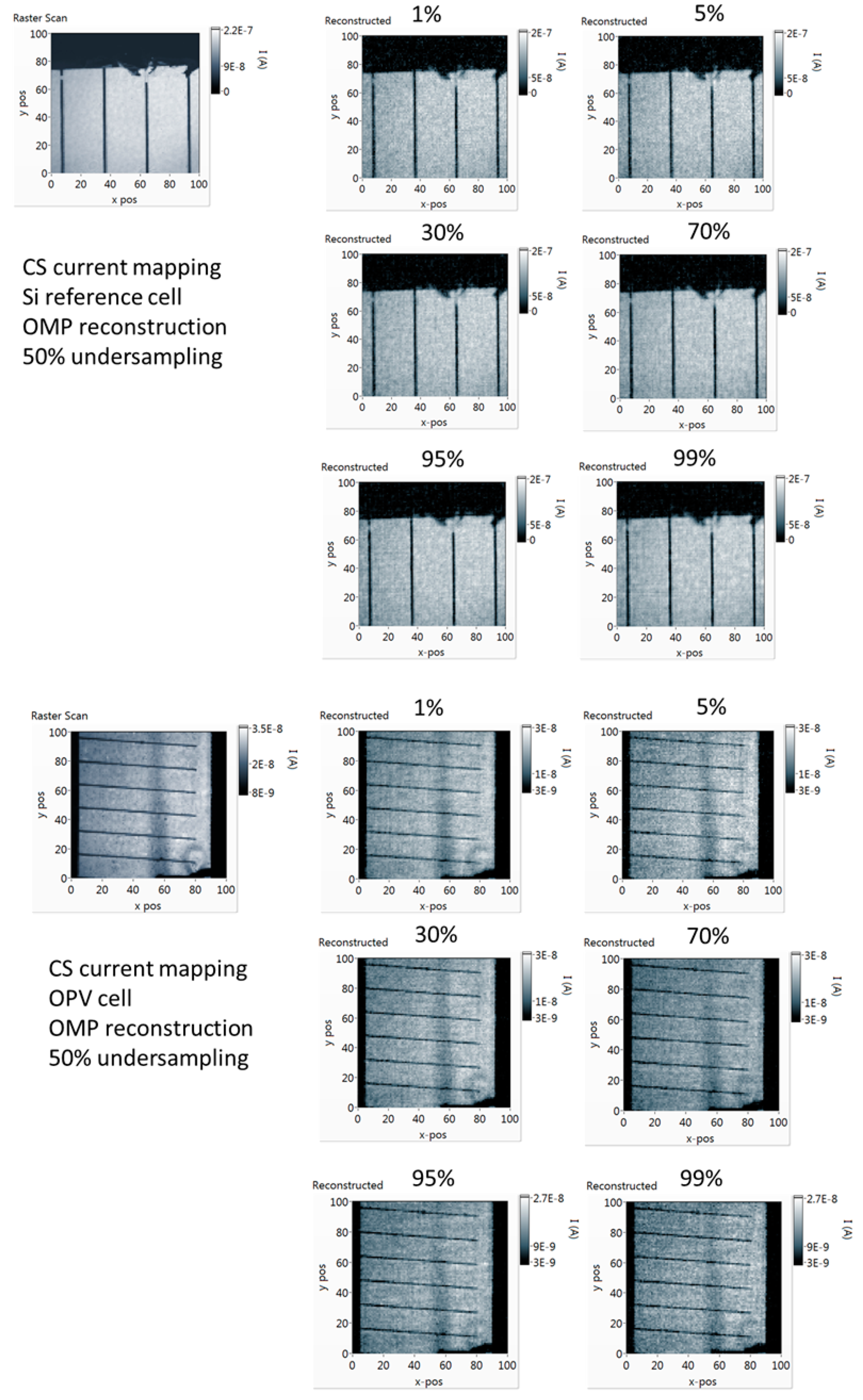
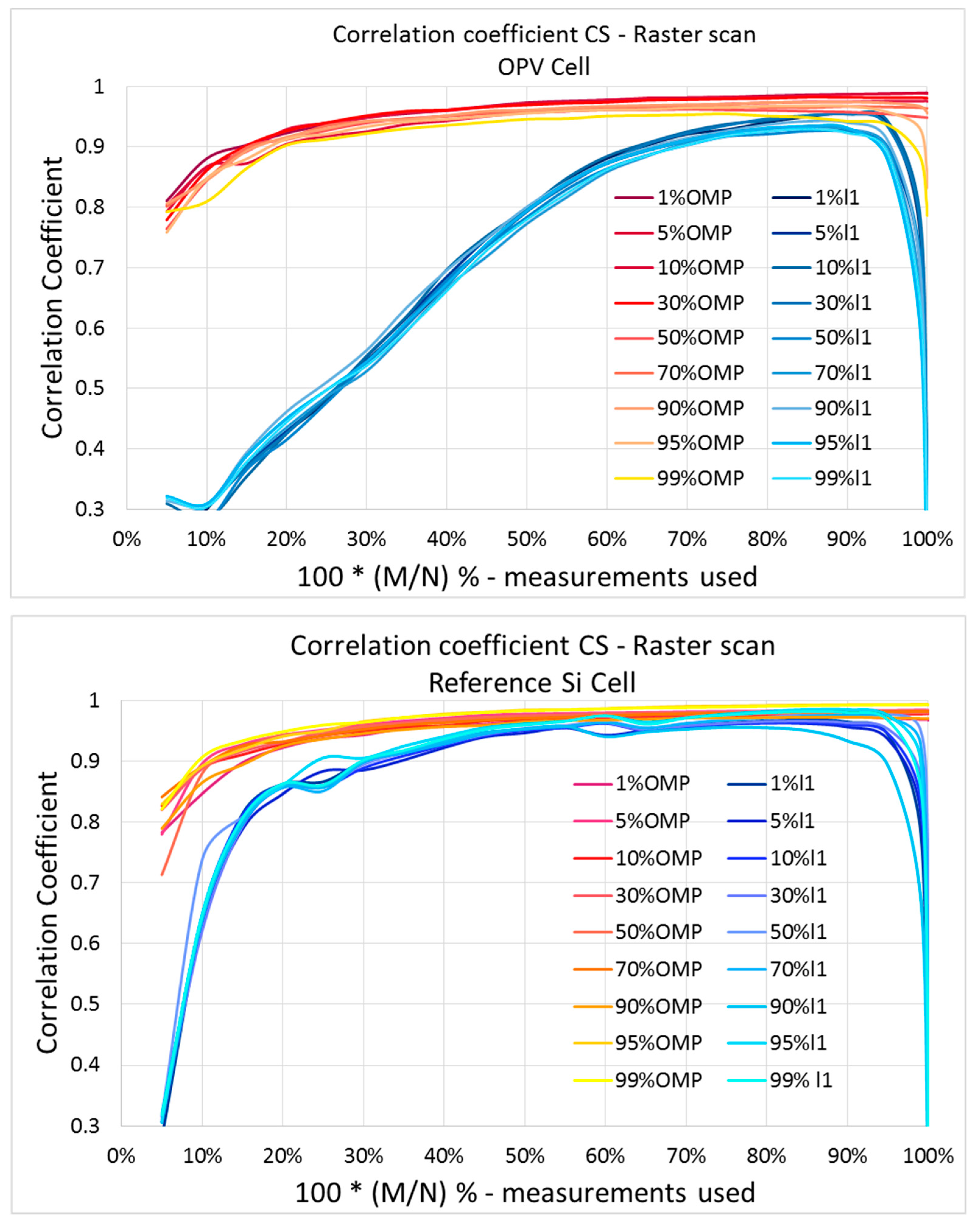
3.3. Reconstruction Performance
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Padilla, M.; Michl, B.; Thaidigsmann, B.; Warta, W.; Schubert, M.C. Short-circuit current density mapping for solar cells. Sol. Energy Mater. Sol. Cells 2014, 120, 282–288. [Google Scholar] [CrossRef]
- Redfern, D.A.; Smith, E.P.G.; Musca, C.A.; Dell, J.M.; Faraone, L. Interpretation of current flow in photodiode structures using laser beam-induced current for characterization and diagnostics. IEEE Trans. Electron Devices 2006, 53, 23–31. [Google Scholar] [CrossRef]
- Qiu, W.C.; Hu, W. Da Laser beam induced current microscopy and photocurrent mapping for junction characterization of infrared photodetectors. Sci. China Phys. Mech. Astron. 2014, 58, 1–13. [Google Scholar] [CrossRef]
- Xu, K.; Huang, L.; Zhang, Z.; Zhao, J.; Zhang, Z.; Snyman, L.W.; Swart, J.W. Light emission from a poly-silicon device with carrier injection engineering. Mater. Sci. Eng. B 2018, 231, 28–31. [Google Scholar] [CrossRef]
- Xu, K. Silicon MOS Optoelectronic Micro-Nano Structure Based on Reverse-Biased PN Junction. Phys. Status Solidi 2019, 216, 1800868. [Google Scholar] [CrossRef]
- Bokalič, M.; Jankovec, M.; Topič, M. Solar Cell Efficiency Mapping by LBIC. In Proceedings of the 45th International Conference on Microelectronics, Devices and Materials & The Workshop on Advanced Photovoltaic Devices and Technologies, Postojna, Slovenia, 9–11 September 2009; pp. 269–273. [Google Scholar]
- Rinio, M.; Müller, H.J.; Werner, M. LBIC investigations of the lifetime degradation by extended defects in multicrystalline solar silicon. Solid State Phenom. 1998, 63–64, 115–122. [Google Scholar] [CrossRef]
- Carstensen, J.; Schütt, A.; Popkirov, G.; Föll, H. CELLO measurement technique for local identification and characterization of various types of solar cell defects. Phys. Status Solidi 2011, 8, 1342–1346. [Google Scholar] [CrossRef]
- Vorasayan, P.; Betts, T.R.; Gottschalg, R. Limited laser beam induced current measurements: A tool for analysing integrated photovoltaic modules. Meas. Sci. Technol. 2011, 22, 085702. [Google Scholar] [CrossRef]
- Sites, J.R.; Nagle, T.J. LBIC analysis of thin-film polycrystalline solar cells. In Proceedings of the Conference Record of the IEEE Photovoltaic Specialists Conference, Lake Buena Vista, FL, USA, 3–7 January 2005; pp. 199–204. [Google Scholar]
- Geisthardt, R.M.; Sites, J.R. Nonuniformity characterization of cdte solar cells using LBIC. IEEE J. Photovoltaics 2014, 4, 1114–1118. [Google Scholar] [CrossRef]
- Carstensen, J.; Popkirov, G.; Bahr, J.; Föll, H. CELLO: An advanced LBIC measurement technique for solar cell local characterization. Sol. Energy Mater. Sol. Cells 2003, 76, 599–611. [Google Scholar] [CrossRef]
- Vorasayan, P.; Betts, T.R.; Tiwari, A.N.; Gottschalg, R. Multi-laser LBIC system for thin film PV module characterisation. Sol. Energy Mater. Sol. Cells 2009, 93, 917–921. [Google Scholar] [CrossRef][Green Version]
- Seager, C.H. The determination of grain-boundary recombination rates by scanned spot excitation methods. J. Appl. Phys. 1982, 53, 5968. [Google Scholar] [CrossRef]
- Gupta, R.; Breitenstein, O. Digital micromirror device application for inline characterization of solar cells by tomographic light beam-induced current imaging. Proc. SPIE 2007, 6616, 66160O-1–66160O-9. [Google Scholar] [CrossRef]
- Hornbeck, L.J. The DMDTM Projection Display Chip: A MEMS-Based Technology. MRS Bull. 2001, 26, 325–327. [Google Scholar] [CrossRef]
- Riddick, B.C.; Montgomery, E.J.; Fiorito, R.B.; Zhang, H.D.; Shkvarunets, A.G.; Pan, Z.; Khan, S.A. Photocathode quantum efficiency mapping at high resolution using a digital micromirror device. Phys. Rev. Spec. Top. Accel. Beams 2013, 16, 14–17. [Google Scholar] [CrossRef]
- Yoo, J.; Kim, S.; Lee, D.; Park, S. Spatial uniformity inspection apparatus for solar cells using a projection display. Appl. Opt. 2012, 51, 4563–4568. [Google Scholar] [CrossRef] [PubMed]
- Fong, A.Y. Application of digital micromirror devices for spectral-response characterization of solar cells and photovoltaics. In Emerging Digital Micromirror Device Based Systems and Applications II; International Society for Optics and Photonics: Leiden, The Netherlands, 2010; Volume 7596, pp. 75960I-1–75960I-8. [Google Scholar]
- Missbach, T.; Karcher, C.; Siefer, G. Frequency Division Multiplex Based Quantum Efficiency Determination of Solar Cells. In 2015 IEEE 42nd Photovoltaic Specialist Conference, PVSC 2015; IEEE: New Orleans, LA, USA, 2015; pp. 1–6. [Google Scholar]
- Xu, K. Integrated Silicon Directly Modulated Light Source Using p-Well in Standard CMOS Technology. IEEE Sens. J. 2016, 16, 6184–6191. [Google Scholar] [CrossRef]
- Koutsourakis, G.; Cashmore, M.; Hall, S.R.G.; Bliss, M.; Betts, T.R.; Gottschalg, R. Compressed Sensing Current Mapping Spatial Characterization of Photovoltaic Devices. IEEE J. Photovolt. 2017, 7, 486–492. [Google Scholar] [CrossRef]
- Hall, S.R.G.; Cashmore, M.; Blackburn, J.; Koutsourakis, G.; Gottschalg, R. Compressive Current Response Mapping of Photovoltaic Devices Using MEMS Mirror Arrays. IEEE Trans. Instrum. Meas. 2016, 65, 1945–1950. [Google Scholar] [CrossRef]
- Cashmore, M.T.; Koutsourakis, G.; Gottschalg, R.; Hall, S.R.G. Optical technique for photovoltaic spatial current response measurements using compressive sensing and random binary projections. J. Photonics Energy 2016, 6, 025508. [Google Scholar] [CrossRef]
- Quan, L.; Xie, K.; Xi, R.; Liu, Y. Compressive light beam induced current sensing for fast defect detection in photovoltaic cells. Sol. Energy 2017, 150, 345–352. [Google Scholar] [CrossRef]
- Donoho, D. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.K.; Tao, T. Stable signal recovery from incomplete and inaccurate measurements. Commun. Pure Appl. Math. 2006, 59, 1207–1223. [Google Scholar] [CrossRef]
- Lustig, M.; Donoho, D.; Pauly, J.M. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 2007, 58, 1182–1195. [Google Scholar] [CrossRef] [PubMed]
- Duarte, M.F.; Davenport, M.A.; Takhar, D.; Laska, J.N.; Sun, T.; Kelly, K.F.; Baraniuk, R.G. Single-Pixel Imaging via Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef]
- Ender, J.H.G. On compressive sensing applied to radar. Signal Process. 2010, 90, 1402–1414. [Google Scholar] [CrossRef]
- Ye, P.; Paredes, J.L.; Arce, G.R.; Wu, Y.; Chen, C.; Prather, D.W. Compressive confocal microscopy. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; Volume 7210, pp. 429–432. [Google Scholar]
- Li, Z.; Gao, F.; Greenham, N.C.; McNeill, C.R. Comparison of the Operation of Polymer/Fullerene, Polymer/Polymer, and Polymer/Nanocrystal Solar Cells: A Transient Photocurrent and Photovoltage Study. Adv. Funct. Mater. 2011, 21, 1419–1431. [Google Scholar] [CrossRef]
- Marcia, R.F. Compressed sensing for practical optical imaging systems: A tutorial. Opt. Eng. 2011, 50, 072601. [Google Scholar] [CrossRef]
- Koutsourakis, G.; Cashmore, M.; Bliss, M.; Hall, S.R.G.; Betts, T.R.; Gottschalg, R. Compressed sensing current mapping methods for PV characterisation. In Proceedings of the Conference Record of the IEEE Photovoltaic Specialists Conference, Portland, OR, USA, 5–10 June 2016; Volume 2016–Novem, pp. 1308–1312. [Google Scholar]
- Baraniuk, R.; Davenport, M.; DeVore, R.; Wakin, M. A Simple Proof of the Restricted Isometry Property for Random Matrices. Constr. Approx. 2008, 28, 253–263. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Ye, P.; Paredes, J.L.; Wu, Y.; Chen, C.; Arce, G.R.; Prather, D.W. Compressive Confocal Microscopy: 3D Reconstruction Algorithms. In Proceedings of SPIE; SPIE: Bellingham WA, USA, 2009; Volume 7210, pp. 72100G-1–72100G-12. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Method/Pixels in the “on” State | Raster | CS 1% | CS 50% | CS 99% | |
|---|---|---|---|---|---|
| Average Current I (A) | Ref cell | 1.37 × 10−7 | 9.57 × 10−6 | 4.77 × 10−4 | 9.48 × 10−4 |
| OPV | 2.27 × 10−8 | 1.52 × 10−6 | 8.22 × 10−5 | 1.25 × 10−4 | |
| Large cell | 1.07 × 10−5 | 2.14 × 10−5 | 5.34 × 10−4 | 1.05 × 10−3 | |
| SNR | Ref cell | 54 | 2637 | 52,396 | 44,307 |
| OPV | 19.4 | 2676 | 11,963 | 25,969 | |
| Large cell | 1.1 | 973 | 7056 | 9164 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koutsourakis, G.; Blakesley, J.C.; Castro, F.A. Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices. Sensors 2019, 19, 2870. https://doi.org/10.3390/s19132870
Koutsourakis G, Blakesley JC, Castro FA. Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices. Sensors. 2019; 19(13):2870. https://doi.org/10.3390/s19132870
Chicago/Turabian StyleKoutsourakis, George, James C. Blakesley, and Fernando A. Castro. 2019. "Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices" Sensors 19, no. 13: 2870. https://doi.org/10.3390/s19132870
APA StyleKoutsourakis, G., Blakesley, J. C., & Castro, F. A. (2019). Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices. Sensors, 19(13), 2870. https://doi.org/10.3390/s19132870