Estimation of Ankle Joint Power during Walking Using Two Inertial Sensors




Abstract
1. Introduction
2. Materials and Methods
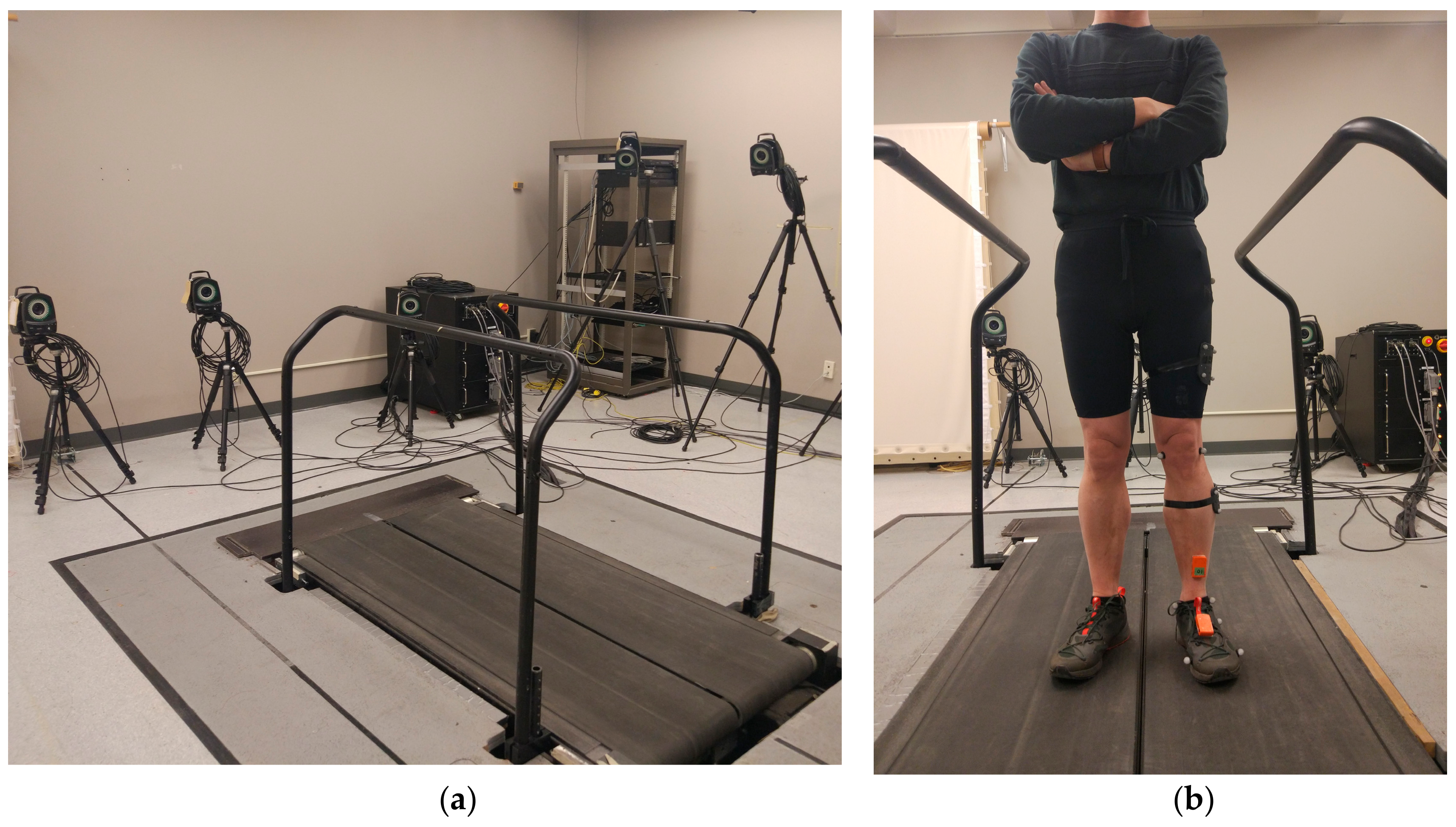
2.1. Experimental Setup
2.2. Protocol and Procedure
2.3. Data Analysis
2.3.1. Reference Ankle Joint Power
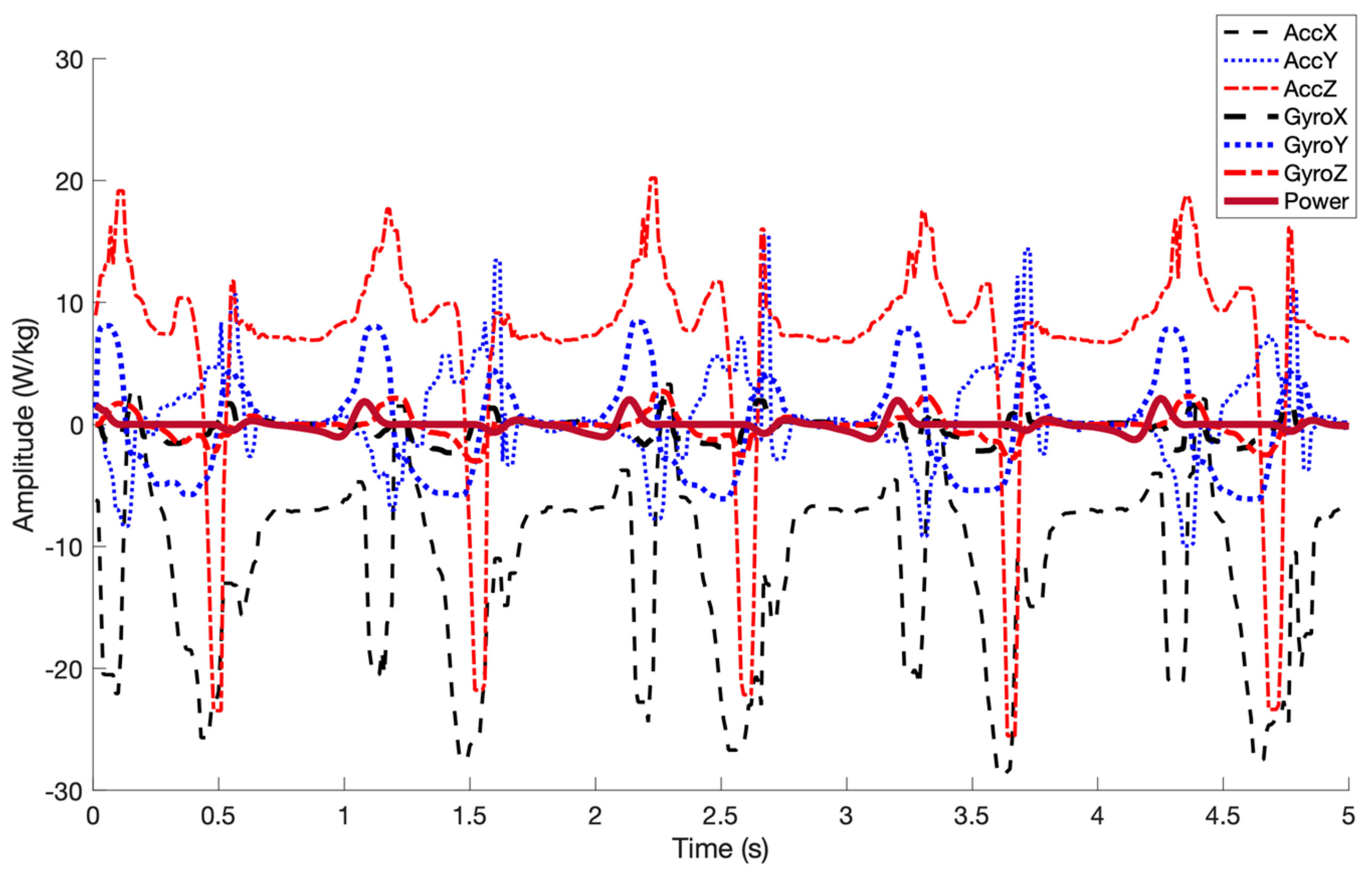
2.3.2. Data Processing
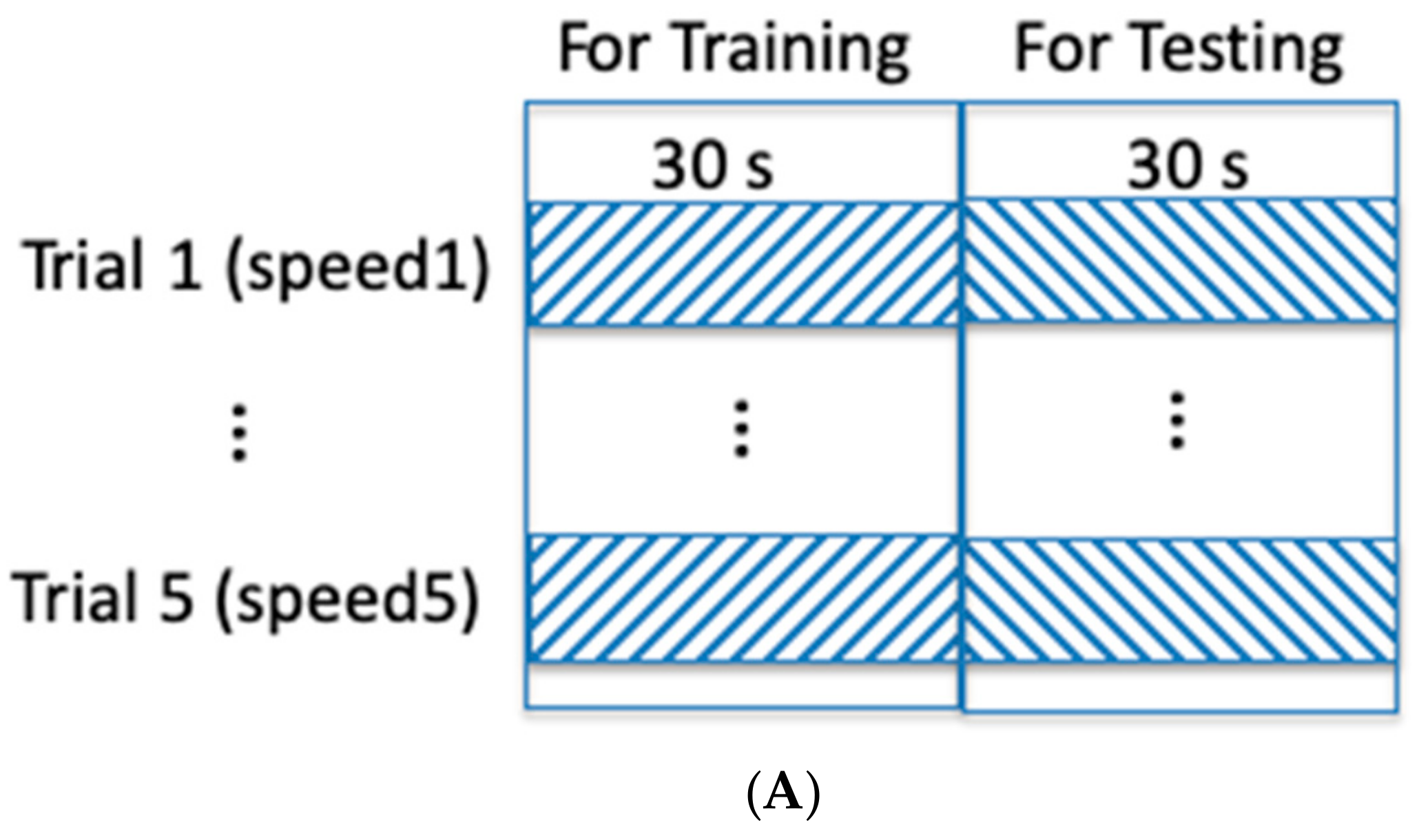
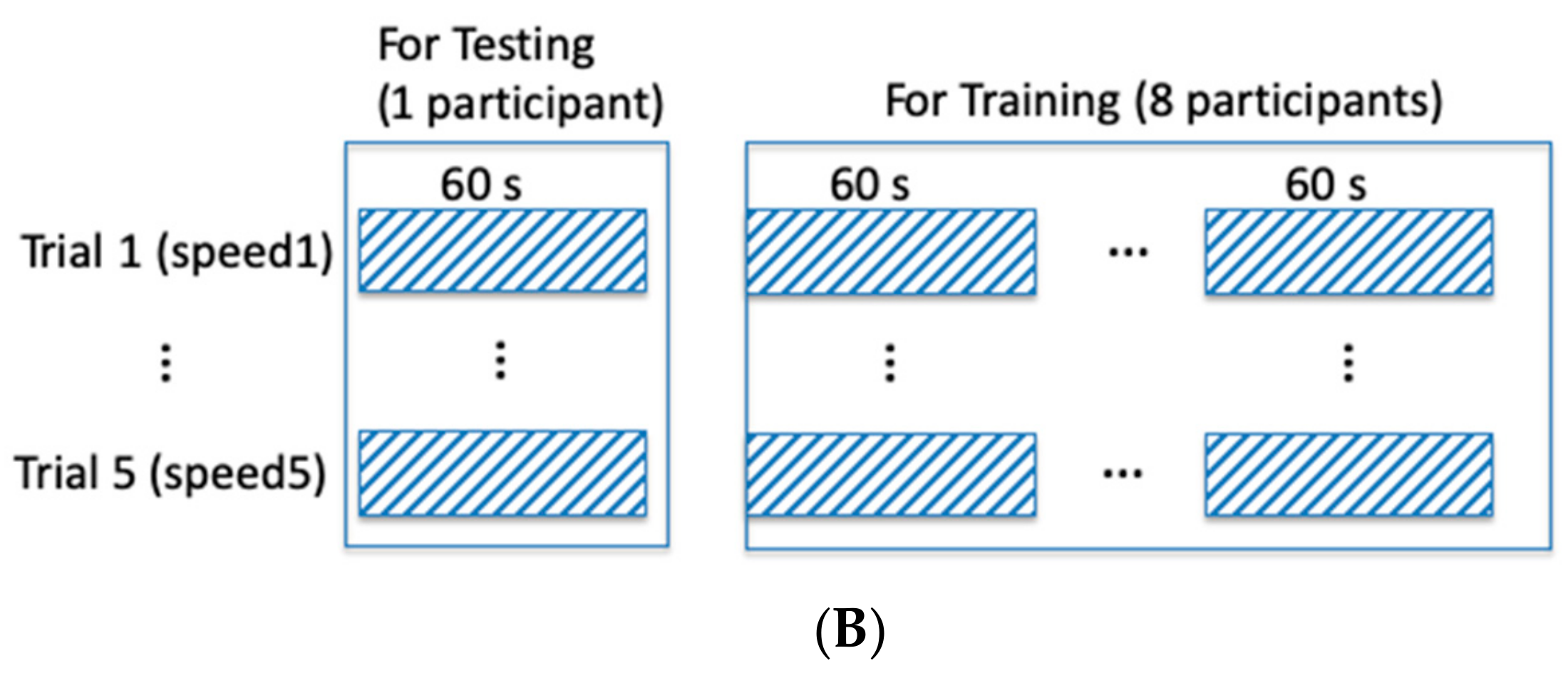
2.3.3. Evaluation
3. Results
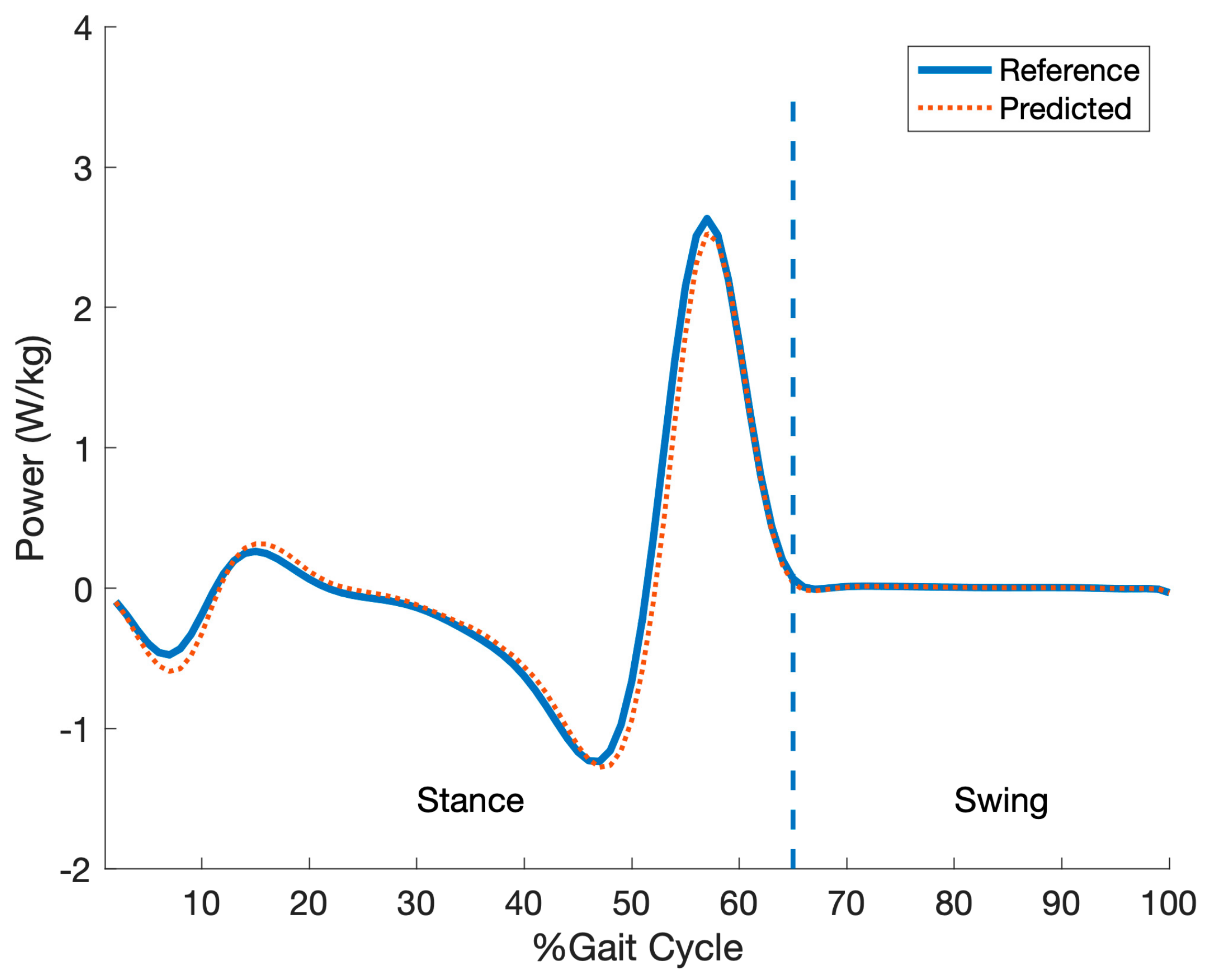
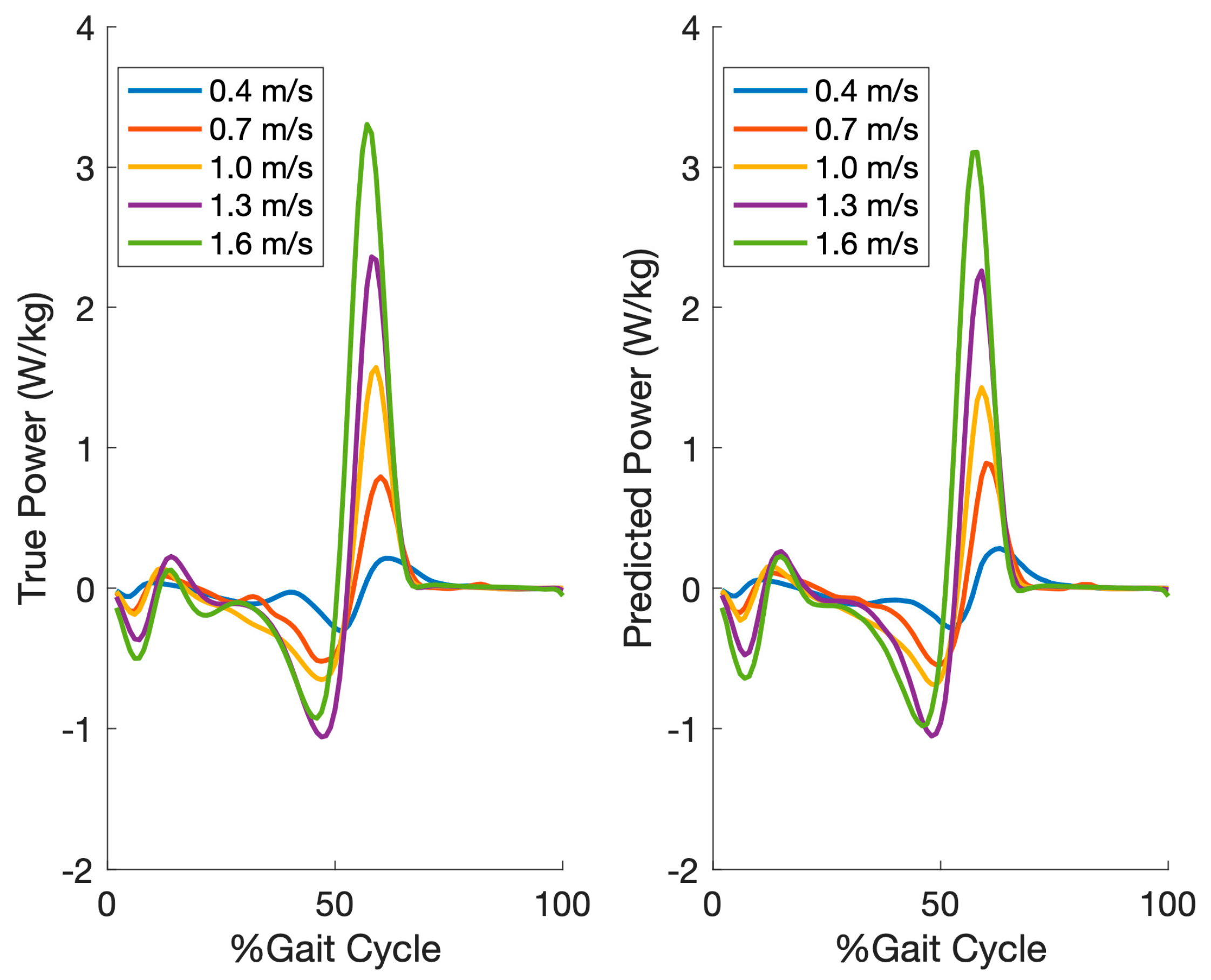
3.1. Intra-Subject Test Accuracy
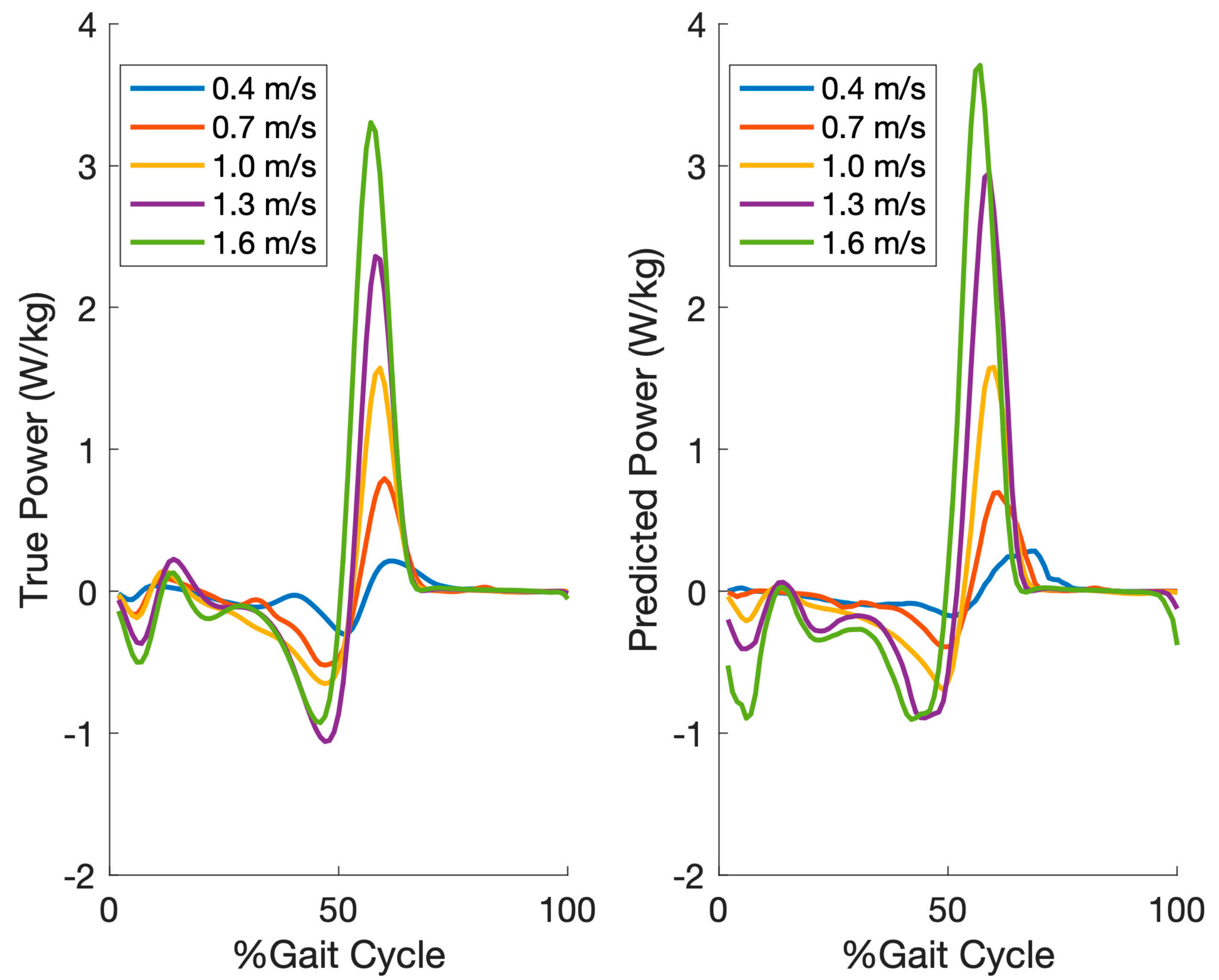
3.2. Inter-Subject Test Accuracy
4. Discussion
5. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jiang, X.; Chu, K.H.; Khoshnam, M.; Menon, C. A Wearable Gait Phase Detection System Based on Force Myography Techniques. Sensors 2018, 18, 1297. [Google Scholar] [CrossRef] [PubMed]
- Gage, J.R.; Deluca, P.A.; Renshaw, T.S. Gait Analysis: Principles and Applications. JBJS 1995, 77, 1607–1623. [Google Scholar] [CrossRef]
- Lapham, A.C.; Bartlett, R.M. The use of artificial intelligence in the analysis of sports performance: A review of applications in human gait analysis and future directions for sports biomechanics. J. Sports Sci. 1995, 13, 229–237. [Google Scholar] [CrossRef] [PubMed]
- Pirker, W.; Katzenschlager, R. Gait disorders in adults and the elderly. Wien. Klin. Wochenschr. 2017, 129, 81–95. [Google Scholar] [CrossRef]
- Baldwin, R.; Bobovych, S.; Robucci, R.; Patel, C.; Banerjee, N. Gait analysis for fall prediction using hierarchical textile-based capacitive sensor arrays. In Proceedings of the 2015 Design Automotive Testing Europe Conference Exhibition, Grenoble, France, 9 January 2015; pp. 1293–1298. [Google Scholar]
- Cimolin, V.; Galli, M. Summary measures for clinical gait analysis: A literature review. Gait Posture 2014, 39, 1005–1010. [Google Scholar] [CrossRef] [PubMed]
- McClelland, J.A.; Webster, K.E.; Feller, J.A. Gait analysis of patients following total knee replacement: A systematic review. Knee 2007, 14, 253–263. [Google Scholar] [CrossRef]
- Ornetti, P.; Maillefert, J.F.; Laroche, D.; Morisset, C.; Dougados, M.; Gossec, L. Gait analysis as a quantifiable outcome measure in hip or knee osteoarthritis: A systematic review. Jt. Bone Spine 2010, 77, 421–425. [Google Scholar] [CrossRef] [PubMed]
- Salarian, A.; Russmann, H.; Vingerhoets, F.J.G.; Dehollain, C.; Blanc, Y.; Burkhard, P.R.; Aminian, K. Gait assessment in Parkinson’s disease: Toward an ambulatory system for long-term monitoring. IEEE Trans. Biomed. Eng. 2004, 51, 1434–1443. [Google Scholar] [CrossRef]
- Zelik, K.E.; Kuo, A.D. Human walking isn’t all hard work: Evidence of soft tissue contributions to energy dissipation and return. J. Exp. Biol. 2010, 213, 4257–4264. [Google Scholar] [CrossRef]
- Lipfert, S.W.; Günther, M.; Renjewski, D.; Seyfarth, A. Impulsive ankle push-off powers leg swing in human walking. J. Exp. Biol. 2014, 217, 1218–1228. [Google Scholar] [CrossRef]
- JudgeRoy, J.O.; Davis, B., III; Õunpuu, S. Step length reductions in advanced age: The role of ankle and hip kinetics. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 1996, 51, M303–M312. [Google Scholar] [CrossRef] [PubMed]
- Valderrabano, V.; Nigg, B.M.; von Tscharner, V.; Stefanyshyn, D.J.; Goepfert, B.; Hintermann, B. Gait analysis in ankle osteoarthritis and total ankle replacement. Clin. Biomech. 2007, 22, 894–904. [Google Scholar] [CrossRef] [PubMed]
- Olney, S.J.; Griffin, M.P.; Monga, T.N.; McBride, I.D. Work and power in gait of stroke patients. Arch. Phys. Med. Rehabil. 1991, 72, 309–314. [Google Scholar] [CrossRef] [PubMed]
- Olney, S.J.; Richards, C. Hemiparetic gait following stroke. Part I: Characteristics. Gait Posture 1996, 4, 136–148. [Google Scholar] [CrossRef]
- Malcolm, P.; Quesada, R.E.; Caputo, J.M.; Collins, S.H. The influence of push-off timing in a robotic ankle-foot prosthesis on the energetics and mechanics of walking. J. Neuroeng. Rehabil. 2015, 12, 21. [Google Scholar] [CrossRef] [PubMed]
- Wouda, F.J.; Giuberti, M.; Bellusci, G.; Maartens, E.; Reenalda, J.; van Beijnum, B.J.F.; Veltink, P.H. Estimation of Vertical Ground Reaction Forces and Sagittal Knee Kinematics During Running Using Three Inertial Sensors. Front. Physiol. 2018, 9, 218. [Google Scholar] [CrossRef] [PubMed]
- Bogey, R.A.; Gitter, A.J.; Barnes, L.A. Determination of ankle muscle power in normal gait using an EMG-to-force processing approach. J. Electromyogr. Kinesiol. 2010, 20, 46–54. [Google Scholar] [CrossRef]
- Weber, D. Differences in physical aging measured by walking speed: Evidence from the English Longitudinal Study of Ageing. BMC Geriatr. 2016, 16, 31. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Sadarangani, G.P.; Menon, C. A preliminary investigation on the utility of temporal features of Force Myography in the two-class problem of grasp vs. no-grasp in the presence of upper-extremity movements. Biomed. Eng. Online 2017, 16, 59. [Google Scholar] [CrossRef]
- Breiman, L.E.O. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and regression by random forest. Nucleic Acids Res. 2013, 5, 983–999. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speeds (m/s) | |||||
|---|---|---|---|---|---|
| Accuracy | 0.4 | 0.7 | 1.0 | 1.3 | 1.7 |
| Correlation coefficient (R) | 0.94 | 0.97 | 0.98 | 0.98 | 0.98 |
| Root mean squared error (RMSE) | 0.03 | 0.04 | 0.06 | 0.08 | 0.10 |
| Normalized root mean squared error (NRMSE) | 0.49% | 0.77% | 1.00% | 1.37% | 1.71% |
| Speeds (m/s) | |||||
|---|---|---|---|---|---|
| 0.4 | 0.7 | 1.0 | 1.3 | 1.7 | |
| True Peak Power (w/kg) | 0.34 | 0.91 | 1.71 | 2.52 | 3.04 |
| Power Range (w/kg) | 0.67 | 1.55 | 2.55 | 3.52 | 3.97 |
| Predicted Peak Power (w/kg) (Intra-subject) | 0.34 | 0.90 | 1.65 | 2.53 | 3.03 |
| Predicted Peak Power (w/kg) (Inter-subject) | 0.42 | 1.00 | 1.90 | 2.70 | 3.17 |
| True Peak Occurrence | 60.7% | 60.3% | 58.0% | 56.6% | 54.8% |
| Predicted Peak Occurrence (Intra-subject) | 61.3% | 60.4% | 58.1% | 57.1% | 55.2% |
| Predicted Peak Occurrence (Inter-subject) | 62.0% | 60.5% | 58.0% | 56.8% | 54.8% |
| Speeds (m/s) | |||||
|---|---|---|---|---|---|
| Accuracy | 0.4 | 0.7 | 1.0 | 1.3 | 1.7 |
| Correlation coefficient (R) | 0.84 | 0.87 | 0.91 | 0.92 | 0.93 |
| Root mean squared error (RMSE) | 0.06 | 0.11 | 0.14 | 0.17 | 0.21 |
| Normalized root mean squared error (NRMSE) | 1.0% | 1.8% | 2.5% | 3.0% | 3.8% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Gholami, M.; Khoshnam, M.; Eng, J.J.; Menon, C. Estimation of Ankle Joint Power during Walking Using Two Inertial Sensors. Sensors 2019, 19, 2796. https://doi.org/10.3390/s19122796
Jiang X, Gholami M, Khoshnam M, Eng JJ, Menon C. Estimation of Ankle Joint Power during Walking Using Two Inertial Sensors. Sensors. 2019; 19(12):2796. https://doi.org/10.3390/s19122796
Chicago/Turabian StyleJiang, Xianta, Mohsen Gholami, Mahta Khoshnam, Janice J. Eng, and Carlo Menon. 2019. "Estimation of Ankle Joint Power during Walking Using Two Inertial Sensors" Sensors 19, no. 12: 2796. https://doi.org/10.3390/s19122796
APA StyleJiang, X., Gholami, M., Khoshnam, M., Eng, J. J., & Menon, C. (2019). Estimation of Ankle Joint Power during Walking Using Two Inertial Sensors. Sensors, 19(12), 2796. https://doi.org/10.3390/s19122796