Integration of Ground- Penetrating Radar and Gamma-Ray Detectors for Nonintrusive Characterisation of Buried Radioactive Objects



Abstract
1. Introduction
2. Theoretical Framework
3. Materials and Methods
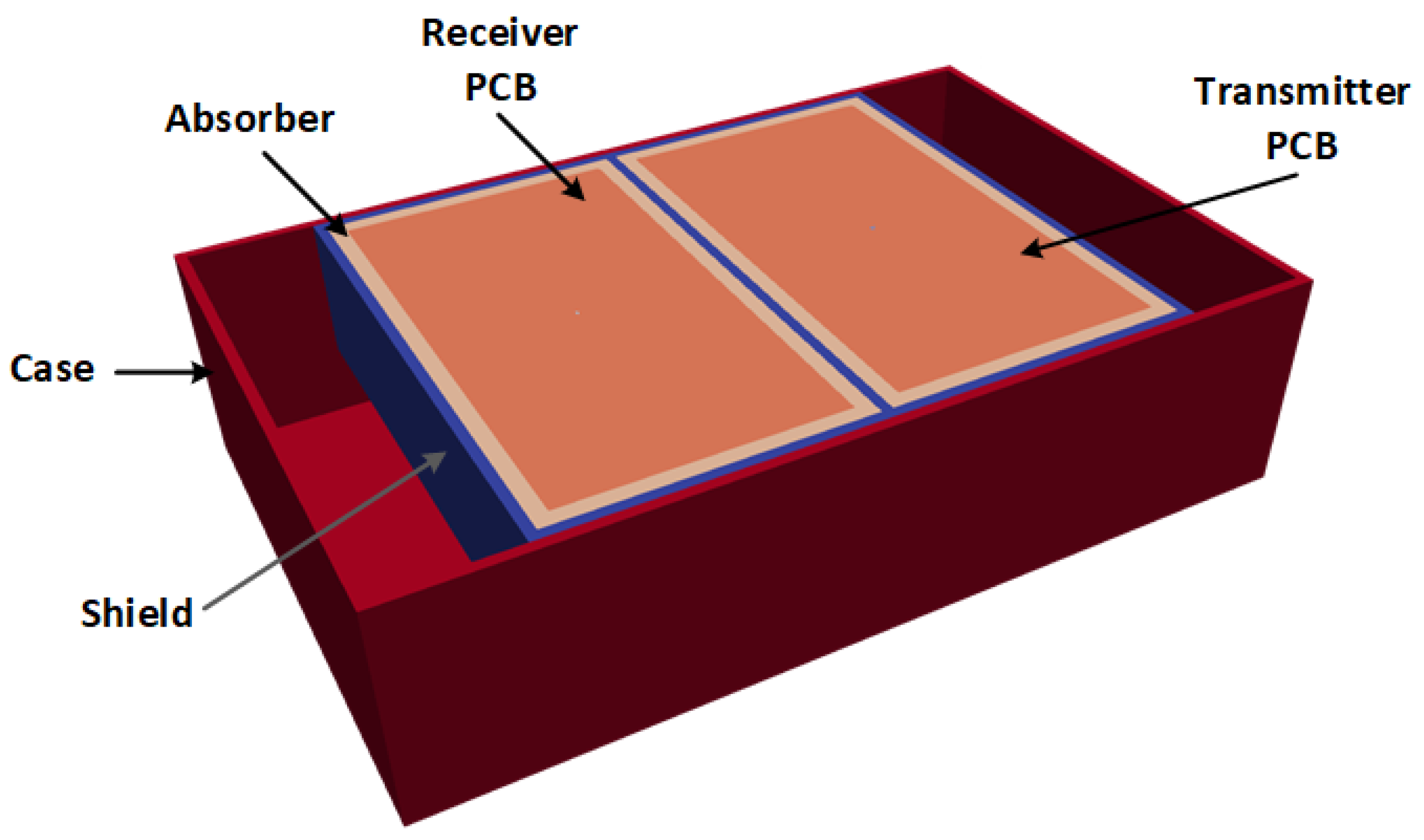
3.1. Selection and Modelling of Sensors
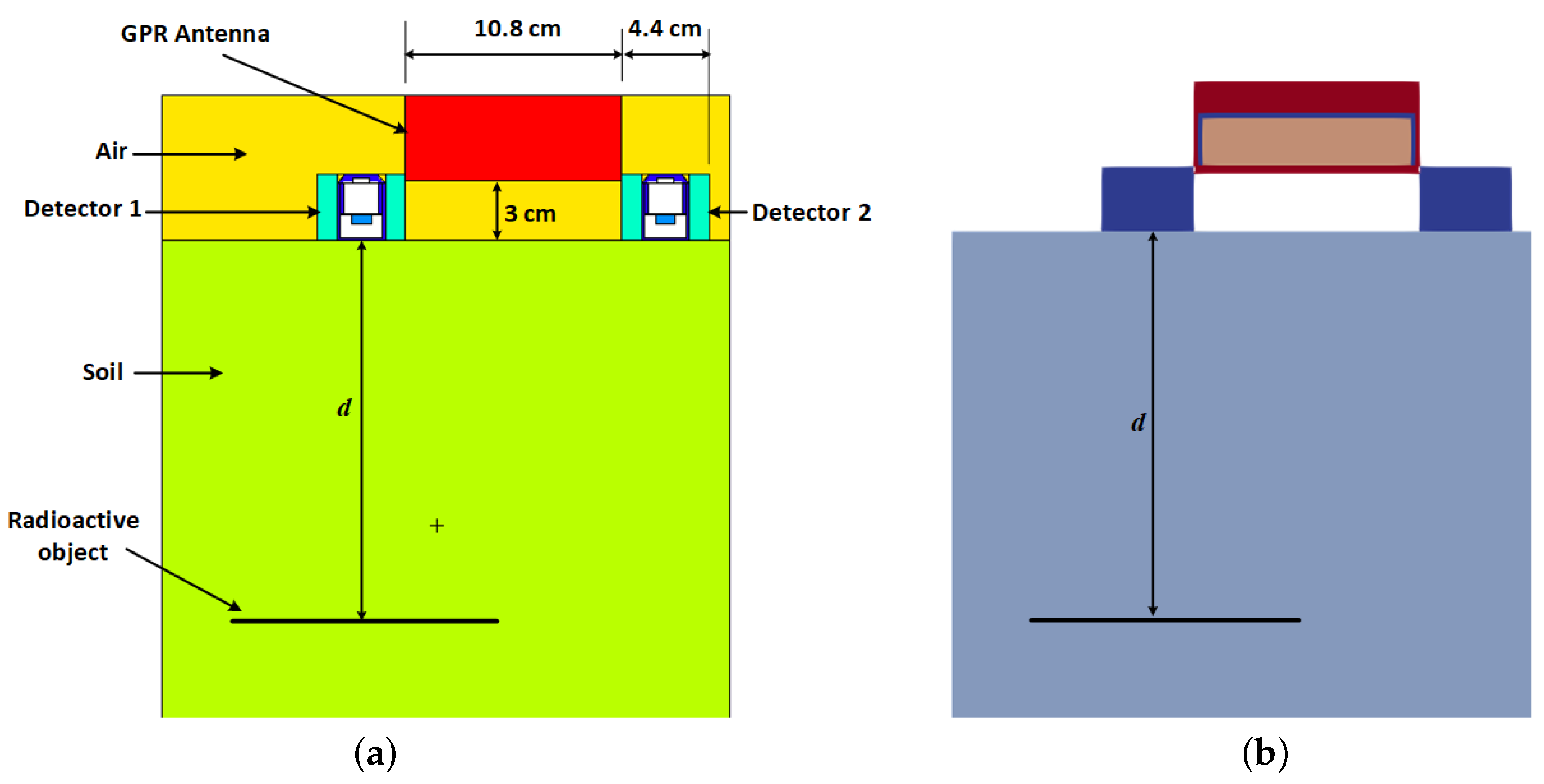
3.2. Measurement Scenario Modelling
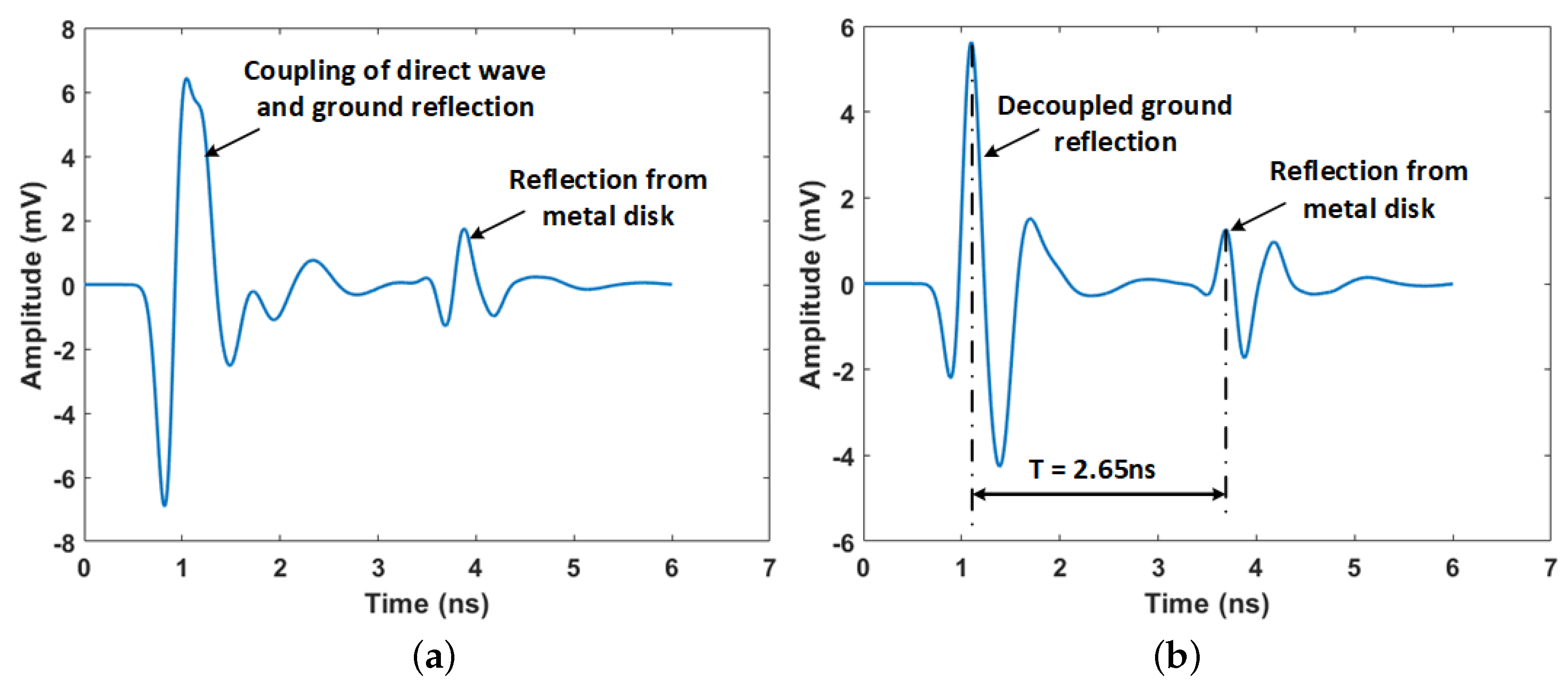
3.3. Simulation and Data Processing
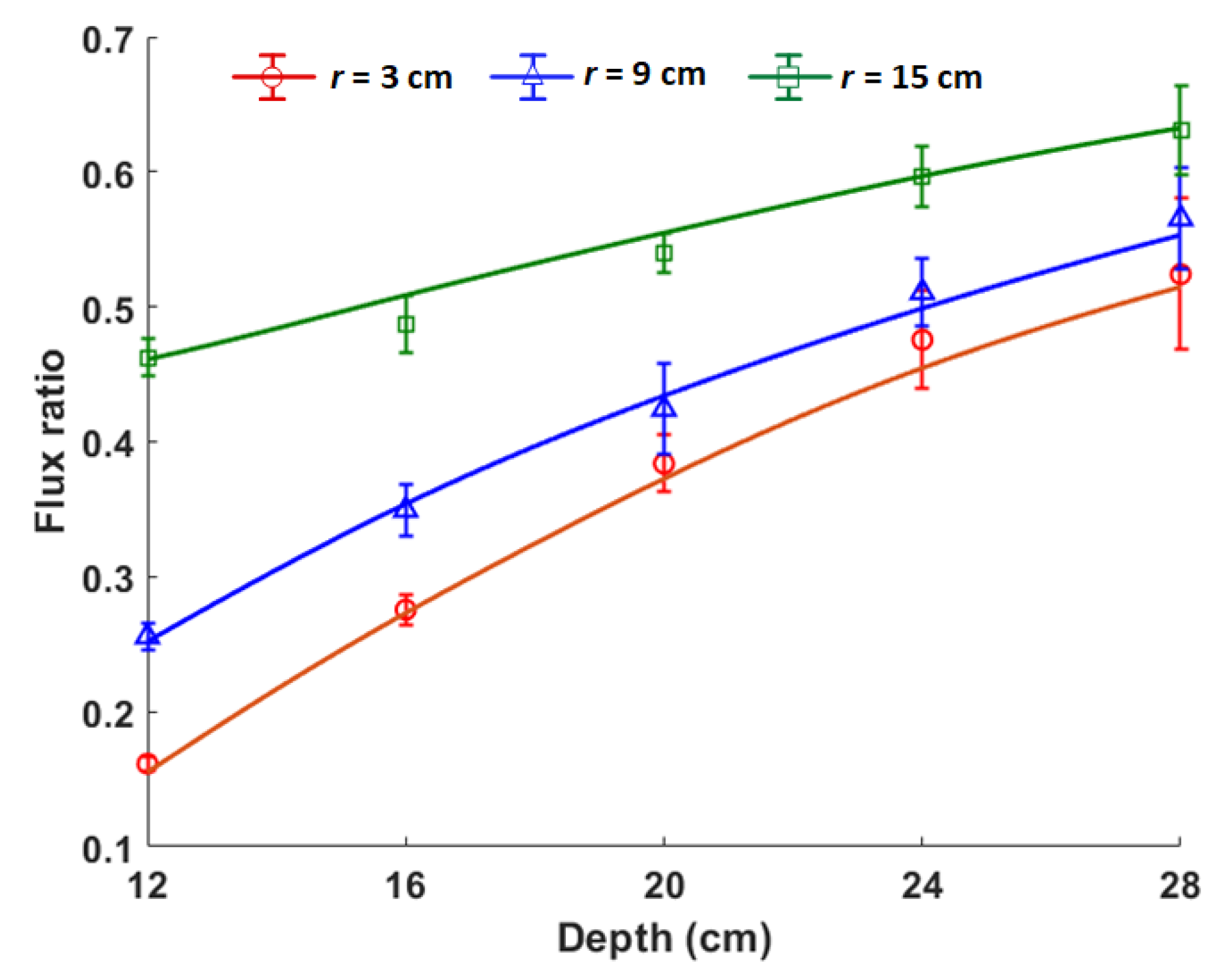
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Popp, A.; Ardouin, C.; Alexander, M.; Blackley, R.; Murray, A. Improvement of a high risk category source buried in the grounds of a hospital in Cambodia. In Proceedings of the 13th International Congress of the International Radiation Protection Association, Glasgow, UK, 13–18 May 2012; pp. 1–10. [Google Scholar]
- IAEA. Radiation Protection and Safety of Radiation Sources: International Basic Safety Standards; Technical Report GSR Part 3; International Atomic Energy Agency: Vienna, Austria, 2014. [Google Scholar]
- Bleise, A.; Danesi, P.R.; Burkart, W. Properties, use and health effects of depleted uranium. J. Environ. Radioact. 2003, 64, 93–112. [Google Scholar] [CrossRef]
- Maeda, K.; Sasaki, S.; Kumai, M.; Sato, I.; Suto, M.; Ohsaka, M.; Goto, T.; Sakai, H.; Chigira, T.; Murata, H. Distribution of radioactive nuclides of boring core samples extracted from concrete structures of reactor buildings in the Fukushima Daiichi Nuclear Power Plant. J. Nucl. Sci. Technol. 2014, 51, 1006–1023. [Google Scholar] [CrossRef]
- Varley, A.; Tyler, A.; Smith, L.; Dale, P. Development of a neural network approach to characterise226Ra contamination at legacy sites using gamma-ray spectra taken from boreholes. J. Environ. Radioact. 2015, 140, 130–140. [Google Scholar] [CrossRef] [PubMed]
- Varley, A.; Tyler, A.; Dowdall, M.; Bondar, Y.; Zabrotski, V. An in situ method for the high resolution mapping of137Cs and estimation of vertical depth penetration in a highly contaminated environment. Sci. Total Environ. 2017, 605–606, 957–966. [Google Scholar] [CrossRef] [PubMed]
- Varley, A.; Tyler, A.; Bondar, Y.; Hosseini, A.; Zabrotski, V.; Dowdall, M. Reconstructing the deposition environment and long-term fate of Chernobyl137Cs at the floodplain scale through mobile gamma spectrometry. Environ. Pollut. 2018, 240, 191–199. [Google Scholar] [CrossRef]
- Adams, J.C.; Mellor, M.; Joyce, M.J. Depth determination of buried caesium-137 and cobalt-60 sources using scatter peak data. IEEE Trans. Nucl. Sci. 2010, 57, 2752–2757. [Google Scholar] [CrossRef]
- Iwamoto, Y.; Kataoka, J.; Kishimoto, A.; Nishiyama, T.; Taya, T.; Okochi, H.; Ogata, H.; Yamamoto, S. Novel methods for estimating 3D distributions of radioactive isotopes in materials. Nucl. Instrum. Methods Phys. Res. Sec. A 2016, 831, 295–300. [Google Scholar] [CrossRef]
- Adams, J.C.; Mellor, M.; Joyce, M.J. Determination of the depth of localized radioactive contamination by 137Cs and 60Co in sand with principal component analysis. Environ. Sci. Technol. 2011, 45, 8262–8267. [Google Scholar] [CrossRef]
- Adams, J.C.; Joyce, M.J.; Mellor, M. Depth profiling 137Cs and 60Co non-intrusively for a suite of industrial shielding materials and at depths beyond 50 mm. Appl. Radiat. Isot. 2012, 70, 1150–1153. [Google Scholar] [CrossRef]
- Adams, J.C.; Joyce, M.J.; Mellor, M. The advancement of a technique using principal component analysis for the non-intrusive depth profiling of radioactive contamination. IEEE Trans. Nucl. Sci. 2012, 59, 1448–1452. [Google Scholar] [CrossRef]
- Varley, A.; Tyler, A.; Smith, L.; Dale, P.; Davies, M. Remediating radium contaminated legacy sites: Advances made through machine learning in routine monitoring of “hot” particles. Sci. Total Environ. 2015, 521–522, 270–279. [Google Scholar] [CrossRef] [PubMed]
- Varley, A.; Tyler, A.; Smith, L.; Dale, P.; Davies, M. Mapping the spatial distribution and activity of 226Ra at legacy sites through Machine Learning interpretation of gamma-ray spectrometry data. Sci. Total Environ. 2016, 545–546, 654–661. [Google Scholar] [CrossRef] [PubMed]
- Shippen, A.; Joyce, M.J. Profiling the depth of caesium-137 contamination in concrete via a relative linear attenuation model. Appl. Radiat. Isot. 2010, 68, 631–634. [Google Scholar] [CrossRef] [PubMed]
- Haddad, K.; Al-Masri, M.S.; Doubal, A.W. Determination of 226Ra contamination depth in soil using the multiple photopeaks method. J. Environ. Radioact. 2014, 128, 33–37. [Google Scholar] [CrossRef] [PubMed]
- Benke, R.R.; Kearfott, K.J. An improved in situ method for determining depth distributions of gamma-ray emitting radionuclides. Nucl. Instrum. Methods in Phy. Res. Sect. A 2001, 463, 393–412. [Google Scholar] [CrossRef]
- Dewey, S.C.; Whetstone, Z.D.; Kearfott, K.J. A method for determining the analytical form of a radionuclide depth distribution using multiple gamma spectrometry measurements. J. Environ. Radioact. 2011, 102, 581–588. [Google Scholar] [CrossRef] [PubMed]
- Whetstone, Z.D.; Dewey, S.C.; Kearfott, K.J. Simulation of a method for determining one-dimensional137Cs distribution using multiple gamma spectroscopic measurements with an adjustable cylindrical collimator and center shield. Appl. Radiat. Isot. 2011, 69, 790–802. [Google Scholar] [CrossRef]
- Dewey, S.C.; Whetstone, Z.D.; Kearfott, K.J. A numerical method for the calibration of in situ gamma ray spectroscopy systems. Health Phys. 2010, 98, 657–671. [Google Scholar] [CrossRef]
- Brovelli, A.; Cassiani, G. Effective permittivity of porous media: A critical analysis of the complex refractive index model. Geophys. Prospect. 2008, 56, 715–727. [Google Scholar] [CrossRef]
- Ukaegbu, I.K.; Gamage, K.A.; Aspinall, M.D. Nonintrusive depth estimation of buried radioactive wastes using ground penetrating radar and a gamma ray detector. Remote Sens. 2019, 11, 7–14. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; Hallikainen, M.T.; El-Rayes, M.A. Microwave Dielectric Behavior of Wet Soil-Part II: Dielectric Mixing Models. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 35–46. [Google Scholar] [CrossRef]
- Peplinski, N.R.; Ulaby, F.T.; Dobson, M.C. Dielectric Properties of Soils in the 0.3–1.3-GHz Range. IEEE Trans. Geosci. Remote Sens. 1995, 33, 803–807. [Google Scholar] [CrossRef]
- Klein, L.; Swift, C. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE Trans. Antennas and Propag. 1977, 25, 104–111. [Google Scholar] [CrossRef]
- Stogryn, A. The Brightness Temperature of a Vertically Structured Medium. Radio Sci. 1970, 5, 1397–1406. [Google Scholar] [CrossRef]
- Ukaegbu, I.K.; Gamage, K.A.A. Ground Penetrating Radar as a Contextual Sensor for Multi-Sensor Radiological Characterisation. Sensors 2017, 17, 790. [Google Scholar] [CrossRef] [PubMed]
- Pelowitz, D.B. MCNPX User’s Manual: Version 2.7.0; Los Alamos National Laboratory: Los Alamos, NM, USA, 2011. [Google Scholar]
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A. Creating finite-difference time-domain models of commercial ground-penetrating radar antennas using Taguchi’s optimization method. Geophysics 2011, 76, G37–G47. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. Realistic FDTD GPR Antenna Models Optimized Using a Novel Linear/Nonlinear Full-Waveform Inversion. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1768–1778. [Google Scholar] [CrossRef]
- Keith, C.; Selby, H.; Lee, A.; White, M.; Bandong, B.; Roberts, K.; Church, J. Activation product interpretation of structural material for fast critical assemblies. Ann. Nucl. Energy 2018, 119, 98–105. [Google Scholar] [CrossRef]
- Gamage, K.A.A.; Joyce, M.J.; Taylor, G.C. A comparison of collimator geometries for imaging mixed radiation fields with fast liquid organic scintillators. In Proceedings of the 2011 2nd International Conference on Advancements in Nuclear Instrumentation, Measurement Methods and their Applications, Ghent, Belgium, 6–9 June 2011; pp. 1–5. [Google Scholar] [CrossRef]
- McConn, R.; Gesh, C.J.; Pagh, R.; Rucker, R.A.; Williams, R. Compendium of Material Composition Data for Radiation Transport Modelling; Technical report; Pacific Northwest National Laboratory: Washington, DC, USA, 2011. [Google Scholar]
- Hilhorst, M.A. A Pore Water Conductivity Sensor. Soil Sci. Soc. Am. J. 2000, 64, 1922–1925. [Google Scholar] [CrossRef]
- Ciampalini, A.; André, F.; Garfagnoli, F.; Grandjean, G.; Lambot, S.; Chiarantini, L.; Moretti, S. Improved estimation of soil clay content by the fusion of remote hyperspectral and proximal geophysical sensing. J. Appl. Geophys. 2015, 116, 135–145. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Values | Estimated Values | ||||||
|---|---|---|---|---|---|---|---|
| r = 3 cm | r = 9 cm | r = 15 cm | |||||
| (cm) | (g cm−3) | (cm) | (g cm−3) | (cm) | (g cm−3) | (cm) | (g cm−3) |
| 12 | 1.52 | 11.8 (2) | 1.36 (11) | 11.9 (1) | 1.34 (12) | 12.2 (1) | 1.25 (18) |
| 16 | 1.52 | 15.7 (2) | 1.42 (7) | 15.7 (2) | 1.43 (6) | 15.2 (5) | 1.54 (1) |
| 20 | 1.52 | 19.8 (1) | 1.41 (7) | 19.6 (2) | 1.45 (5) | 19.0 (5) | 1.57 (3) |
| 24 | 1.52 | 24.0 (0) | 1.38 (9) | 23.1 (4) | 1.52 (0) | 23.5 (2) | 1.46 (4) |
| 28 | 1.52 | 27.7 (1) | 1.43 (6) | 27.9 (0) | 1.41 (7) | 27.3 (2) | 1.48 (3) |
| Estimation Method | Soil 1 ( g cm−3, | Soil 2 ( g cm−3, | Soil 3 ( g cm−3, | |||
|---|---|---|---|---|---|---|
| ) | ) | ) | ||||
| d (cm) | (g cm−3) | d (cm) | (g cm−3) | d (cm) | (g cm−3) | |
| gamma detector and GPR | 19.8 (1) | 1.61 (4) | 19.7 (2) | 1.93 (6) | 19.8 (1) | 2.12 (8) |
| gamma detector only | 19.17 (4) | 1.48 (11) | 17.6 (12) | 1.5 (18) | 16.83 (16) | 1.5 (18) |
| Actual Values | Estimated Values | ||||
|---|---|---|---|---|---|
| (cm) | (g cm−3) | (cm) | (cm) | (g cm−3) | (cm) |
| 12 | 1.52 | 3 | 10.9 (9) | 1.64 (8) | 6.6 (120) |
| 12 | 1.52 | 9 | 11.5 (4) | 1.47 (3) | 9.6 (7) |
| 12 | 1.52 | 15 | 11.6 (3) | 1.43 (6) | 15.1 (1) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ukaegbu, I.K.; Gamage, K.A.A.; Aspinall, M.D. Integration of Ground- Penetrating Radar and Gamma-Ray Detectors for Nonintrusive Characterisation of Buried Radioactive Objects. Sensors 2019, 19, 2743. https://doi.org/10.3390/s19122743
Ukaegbu IK, Gamage KAA, Aspinall MD. Integration of Ground- Penetrating Radar and Gamma-Ray Detectors for Nonintrusive Characterisation of Buried Radioactive Objects. Sensors. 2019; 19(12):2743. https://doi.org/10.3390/s19122743
Chicago/Turabian StyleUkaegbu, Ikechukwu K., Kelum A. A. Gamage, and Michael D. Aspinall. 2019. "Integration of Ground- Penetrating Radar and Gamma-Ray Detectors for Nonintrusive Characterisation of Buried Radioactive Objects" Sensors 19, no. 12: 2743. https://doi.org/10.3390/s19122743
APA StyleUkaegbu, I. K., Gamage, K. A. A., & Aspinall, M. D. (2019). Integration of Ground- Penetrating Radar and Gamma-Ray Detectors for Nonintrusive Characterisation of Buried Radioactive Objects. Sensors, 19(12), 2743. https://doi.org/10.3390/s19122743